Willmore deformations between minimal surfaces in and
Abstract.
In this paper we show that locally there exists a Willmore deformation between minimal surfaces in and minimal surfaces in , i.e., there exists a smooth family of Willmore surfaces such that is conformally equivalent to a minimal surface in and is conformally equivalent to a minimal surface in . For some cases the deformations are global. Consider the Willmore deformations of the Veronese two-sphere and its generalizations in , for any positive number , we construct complete minimal surfaces in with Willmore energy being equal to . An example of complete minimal Möbius strip in with Willmore energy is also presented. We also show that all isotropic minimal surfaces in admit Jacobi fields different from Killing fields, i.e., they are not “isolated”.
Keywords: minimal surfaces; minimal Möbius strip; dressing; Willmore energy; Willmore two-spheres.
MSC(2020): 53A31;53A10; 53C40; 58E20
1. Introduction
Minimal surfaces in are important geometric objects in geometry [3] and mathematical physics [40, 23, 1, 2] and attract many attentions from different kind of directions ([14, 15, 36]). For instance, in [1] it is shown that the renormalized area introduced by Maldacena in [40] can be expressed as the Willmore functional of minimal surfaces in . Moreover, in [2] Alexakis and Mazzeo discussed in details of the geometry and analysis of complete Willmore surfaces in which meet the infinity boundary orthogonally. Minimal surfaces in can be viewed as special kind of Willmore surfaces, which are the critical surface of the Willmore functional. It is natural to consider them under the framework of Willmore surfaces. In [18, 19] Dorfmeister and Wang started the study of the global geometry of Willmore surfaces in terms of the harmonic conformal Gauss maps and the DPW method. Such an idea was first introduced by Hélein in [28] ( generalized by Xia-Shen [56]). Moreover, in [53], a description of minimal surfaces in space forms as special Willmore surfaces is presented.
In this paper, we continue the study minimal surfaces in and along this direction. To begin with, let us first recall the characterization of minimal surfaces in space forms [53] briefly. Roughly speaking, the DPW method gives a representation of Willmore surfaces in terms of some Lie-algebra-valued meromorphic 1-form called normalized potential [17, 28, 18, 19]. Then a Willmore surface being minimal in some space form is equivalent to the Lorenzian orthogonality of some (non-zero) constant real vector with some part of the normalized potential [53]. The vector being lightlike, timelike or spacelike corresponds to the space form , or respectively (See [53] or Theorem 2.5 of Section 2; Compare also [28, 56] for a slightly different treatment, where a different harmonic map introduced by [28] is used).
A key observation due to this paper is that the Lorenzian orthogonality is preserved by some complex group action, while the minimality in space forms could be changed. This makes it possible to deform minimal surfaces in into non-minimal Willmore surfaces and furthermore into minimal surfaces in or conversely111It is natural to compare this correspondence with the famous Lawson correspondence [33]. A crucial difference is that from a minimal surface in , one can obtain a lot of non-isometric minimal surfaces in . See Section 5.:
Theorem 1.1.
(See Theorem 4.1) Let be a minimal surface from a simple connected open subset . There exists a family of Willmore surfaces , , such that and is conformally equivalent to a minimal surface in . Here is an open subset of .
Such a phenomenon is new to the authors’ best knowledge. Note that in [10, 12], dressing actions of Willmore surfaces are discussed. But they are different from the actions discussed here since here we use simply elements in the complexified subgroup . For a general discussion of dressing actions, we refer to [24, 49, 50].
One of the most simple minimal surfaces in is the Veronese two-sphere in . We show explicitly the Willmore deformations for the Veronese two-sphere in . Moreover, we obtain a lot of explicit examples of complete minimal disks in which are deformed from the Veronese two-sphere and its generalizations:
Example 1.2.
(of Proposition 5.10) Set
| (1.1) |
The equation gives two circles of , which divide into three parts. On each part of them,
provides a proper, complete minimal surface in with finite Willmore energy. Moreover, for any number , there exist some and such that one of the above three minimal surfaces, has Willmore energy . Note that when , is in the Willmore deformation family of the Veronese sphere in .
Remark 1.3.
-
(1)
This is different from the value distribution of Willmore two-spheres in [9, 43], where the Willmore energy is always for some . Note that different from the cases discussed in [1, 2], the examples constructed here do not intersect the infinite boundary orthogonally, since there are equivariant and not rotating. But they do intersect the infinite boundary with a constant angle.
-
(2)
By embedding conformally into via the canonical map (see e.g. [4, 11, 52])
the three minimal surfaces form a Willmore immersion from to by crossing the infinite boundary of , which gives an explicit illustration of Babich and Bobenko’s famous construction of Willmore tori (with umbilical circles) in via gluing complete minimal surfaces in at the infinite boundary of in [4]. A slight difference is that, although here the intersection of these surfaces with the infinite boundary is not orthogonal, the whole surface stays smooth. We refer to Section 5.3 for more details.
We also obtain a complete minimal Möbius strip in with Willmore energy (see Section 5.5). It can be extended as above to obtain a branched Willmore in (Compare [29]). It is natural to ask the infimum of the Willmore energy of non-oriented complete minimal surfaces in , in comparison with the famous Willmore conjecture, which is proved by Marques and Neves [41] for the case of . This example shows that the infimum is .
Using the dressing actions, we can construct concretely a family of isotropic minimal surfaces in for each such surface, which shows that they are not isolated.
This paper is organized as follows: in Section 2 we will review the basic theory of Willmore surfaces and loop group description of them in terms of their conformal Gauss map. Then in Section 3 we will discuss in details of the dressing of Willmore surfaces in , as well as applications to minimal surfaces in and . Section 4 is a description of two kind of one parameter group dressing actions on minimal surfaces in and . Then in Section 5 we will focus on examples of complete minimal surfaces in with bounded Gauss curvature and finite Willmore energy. In Section 6 we show that isotropic minimal surfaces in have non-trivial minimal deformations. The paper is ended by an appendix for the technical proof of a lemma.
2. Surface theory of Willmore surfaces and the DPW constructions
In this section we will first recall the basic theory about Willmore surfaces in . Then we will collect the basic DPW theory for harmonic maps in symmetric space and its applications to Willmore surfaces.
2.1. Willmore surfaces in
Here we will follow the treatment for Wilmore surfaces in [11, 18, 19, 38]. Note that in [28, 56], different frames are used in the spirits of [9] and [52] respectively. Let be the Lorentz-Minkowski space with the Lorentzian metric
| for all |
Here Let be the forward light cone. Let be the projective light cone. For a point , we denote by its projection in . Then we can identify with by setting to . Let be a conformal immersion from a Riemann surface . Let be a local complex coordinate on with . We have a canonical lift into with respect to since . Moreover, there exists a global bundle decomposition Here , and is the orthogonal complement of in . Note that is a 4-dimensional Lorenzian subspace and is an dimensional Euclidean subspace. Denote by and the complexifications of and respectively. Let be a frame of such that . Let be the normal connection on , and be an arbitrary section of . Then we have:
| (2.1) |
Here and are named as the conformal Hopf differential and the Schwarzian of respectively [11]. The integrability conditions are as follows:
| (2.2) |
The Willmore energy of is defined to be
Let and denote the mean curvature and Gauss curvature of in respectively. We have
Note that in many cases the Willmore energy is also defined as
In particular, for an oriented closed surface with Euler number ,
For compact surfaces with boundary, to get a conformal invariant functional, one needs to use instead of (See e.g. [1, 2, 47]).
For a surface in hyperbolic space , with or without boundary, the conformal invariant Willmore energy is defined to be (See e.g. [1, 2, 47]).
| (2.3) |
By the Gauss equation of one has
where is the square of the length of the second fundament form of (Compare Theorem 1.2 of [1]). For the case of surfaces in , see (1.2) and (2.8) of [35].
It is well-known that Willmore surfaces can be characterized as follows.
Theorem 2.1.
A local lift of into can be chosen as
| (2.5) |
with Maurer-Cartan form
and
| (2.6) |
Here is an orthonormal basis of and
Finally we recall that for a surface in , it is called isotropic if and only if its Hopf differential satisfies
(see [13, 27, 43, 44]). This is a conformal invariant condition and it plays important roles in the classification of minimal two-spheres [13] and Willmore two-spheres in [27, 43, 44]. It is well-known that if is an isotropic surface in , then it is Willmore [27].
2.2. The DPW construction of Willmore surfaces in via conformal Gauss maps
2.2.1. The DPW construction of harmonic maps
We will recall the basic theory of the DPW methods(See [17, 19] for more details). Let be a symmetric space defined by the involution , with , and Lie algebras , . Then
Let be a harmonic map. Let be a complex coordinate on . Then there exists a frame of with Maurer-Cartan form . The Maurer-Cartan equation reads Decompose it with respect to the Cartan decomposition, we obtain with . Decompose further into the part and the part . Introducing , set
| (2.7) |
It is well known ([17]) that the map is harmonic if and only if
Definition 2.2.
Let be a solution to the equation Then is called the extended frame of the harmonic map . Moreover,
are harmonic maps in for all , called the associated family of . Note that and .
So far we have related harmonic maps with maps into loop groups. Moreover, we need the Iwasawa and Birkhoff decompositions for loop groups. Let be the complexified Lie group of . Extend to an inner involution of with . Let be the group of loops in twisted by . Let be the group of loops that extends holomorphically into and take values at .
Theorem 2.3.
-
(1)
(Iwasawa decomposition): There exists a closed, connected solvable subgroup such that the multiplication is a real analytic diffeomorphism onto the open subset , with
-
(2)
(Birkhoff decomposition): The multiplication is an analytic diffeomorphism onto the open, dense subset of (the big Birkhoff cell), with
The well-known DPW construction for harmonic maps can be stated as follows
Theorem 2.4.
[17] Let be a disk or with complex coordinate .
-
(1)
Let denote a harmonic map with an extended frame and . Then there exists a Birkhoff decomposition of : with taking values in such that is meromorphic. Moreover, the Maurer-Cartan form of is the form
called the normalized potential of , with independent of .
-
(2)
Let be a valued meromorphic 1-form on . Let be a solution to , . Then there exists an Iwasawa decomposition
with on an open subset of . Moreover, is an extended frame of some harmonic map from to with . All harmonic maps can be obtained in this way, since the above two procedures are inverse to each other if the normalization at some based point is fixed.
2.2.2. Normalized potentials of Willmore surfaces in
For simplicity let us restrict to the case for Willmore surfaces [18, 19, 53]. In this case, , , and The involution is given by with . We also have with
Let with Lie algebra . Extend to an inner involution of with fixed point group .
Since Willmore surfaces and their oriented conformal Gauss map are in one to one correspondence [18, 27, 38], we will use the normalized potential for a Willmore surface directly. For later use, we recall the description of minimal surfaces in space forms in terms of normalized potentials.
Theorem 2.5.
[53] (compare also [8, 28, 56]) Let be a Willmore surface in , with its normalized potential being of the form
Then is conformally equivalent to some minimal surface in , or if and only if there exists a non-zero, real, constant vector such that
| (2.8) |
Moreover,
-
(1)
the space form is if and only if
-
(2)
the space form is if and only if
-
(3)
the space form is if and only if
3. dressing actions on Willmore surfaces
In this section, we will use the dressing actions on harmonic maps by for Willmore surfaces. We refer to [12, 24, 34, 49, 50] for more details on dressing actions and their applications on all kinds of geometric problems. Note that here we use the elements in instead of the loop group elements.
3.1. dressing actions
Definition 3.1.
Let . Let be a harmonic map with an extended frame , based at such that . a dressing action by on is defined by the harmonic map
where is given by the following
| (3.1) |
From the definition it is obvious that
Corollary 3.2.
if .
The following result is well-known to the experts. For the reader’s convenience, we state it in the following way with a proof.
Proposition 3.3.
Let and be the normalized potentials of and given by the extended frames and respectively. Then
| (3.2) |
Conversely, assume that and satisfies (3.2), and their integrations have the same initial conditions, then their corresponding harmonic maps and satisfy .
Proof.
By Theorem 2.4, we have
From (3.1), we also have . So
Together with the assumption of having same initial conditions, we obtain that , and (3.2) follows directly.
Concerning the converse part, first by assumptions we have . So
with that is, ∎
Applying to Willmore surfaces, we obtain
Proposition 3.4.
Let . Let be a harmonic map with normalized potential
| (3.3) |
Then the normalized potential of has the form
| (3.4) |
We define the space of the conformal Gauss maps of minimal surfaces in three space forms
| (3.5) |
| (3.6) |
| (3.7) |
We also define the space and its subset as below
| (3.8) |
| (3.9) |
Note that (See [53] for example). In [53], it is shown that up to a conjugation, for any , the normalized potential of has the form ((1) of [53])
with being meromorphic functions.
Set and we define
| (3.10) |
3.2. dressing actions preserve minimal surfaces in
Theorem 3.5.
Let be the oriented conformal Gauss map of a minimal surface in and . Then is also the oriented conformal Gauss map of a minimal surface in , i.e.,
Proof.
To show that , we need to show that . Otherwise assume that . Then there exists and such that . So . Assume that and the normalized potential of is given by . Then the normalized potential of is given by by (3.4).
Since , by [53] we have that either has rank or reduces to a map into or . If has maximal rank 2, then also has maximal rank 2, which is not possible since has maximal rank 1 due to the assumption . If reduces to a map into or , then we can assume w.l.g. that
So
Consider in the first case the constant vector
Apparently the action of does not change its form. So we can assume without lose of generality . Note by construction stays an isotropic vector, i.e., . So there exists some real such that
depending on whether and are linear dependent or not. Here is a constant number. So up to an action , reduces to a harmonic map into , which is contradicted to the assumption , since harmonic maps into does not produce minimal surfaces in . Similarly, the second case produces a harmonic map into , which also does not give minimal surfaces in . Hence ∎
Remark 3.6.
In [34], it is shown that the simple dressing actions preserve minimal surfaces in . Our result here shows that dressing actions preserve minimal surfaces in .
3.3. dressing actions on minimal surfaces in and
Theorem 3.7.
-
(1)
Let . Then for any . Conversely, let . Then there exists some such that . That is
(3.11) -
(2)
Let . Then for any . Conversely, let . Then there exists some such that . That is
(3.12) -
(3)
In particular, for any , there exists some such that . For any , there exists such that . That is,
Proof.
(1) Let with normalized potential given by . Then by Theorem 2.5, there exists some such that
So for any , the normalized potential of is given by , where . So is the vector such that . So . Since , .
Now let with normalized potential given by . Then there exists some such that Set . There exists some , such that
Set and
We see that has normalized potential such that
Since and , .
The proof of (2) is similar to (1) and we leave it for interested readers. (3) is a corollary of (1) and (2). ∎
4. On dressing actions of minimal surfaces in
We will first discuss the general dressing actions briefly. Then we will consider concretely two kinds of 1-parameter subgroups of and their actions on dressing actions of minimal surfaces in and . One of the group changes the minimality and builds a local Willmore deformation between minimal surfaces in and . And the other one keeps the minimality and gives a family of minimal surfaces in ().
4.1. dressing actions of minimal surfaces in &
Proposition 4.1.
-
(1)
The dimension of non-trivial dressing actions of a Willmore surfaces in is less or equal to
(4.1) -
(2)
The dimension of non-trivial dressing actions of a minimal surface in preserving minimality infinitesimally is less or equal to
(4.2) -
(3)
The dimension of non-trivial dressing actions of a minimal surface in preserving minimality infinitesimally is less or equal to
(4.3)
The above spaces of the non-trivial dressing actions can be locally expressed (near ) as and respectively, where
Here and are viewed as subsets of naturally.
4.2. On some dressing actions of minimal surfaces in &
In this subsection, we discuss a special dressing actions which build a smooth local Willmore deformations between minimal surfaces in and . Set
Then , , is a circle subgroup of . We see that if and only if . And if and only if .
First, assume without lose of generality that the normalized potential of a Willmore surface in has the form
By Theorem 2.5, we can assume without lose of generality that the normalized potential of a minimal surface in has the form
| (4.4) |
Here , and are linear independent meromorphic functions.
Theorem 4.2.
The normalized potential
with and all of being of the form (4.4), locally gives a family of Willmore surfaces , , such that , are conformally equivalent to minimal surfaces in and , are conformally equivalent to minimal surfaces in , and for all other , are Willmore surfaces in not minimal in any space forms.
Proof.
It is direct to see that
satisfies
So when or , one obtains minimal surfaces in . So when or , one obtains minimal surfaces in .
For other , assume is conformal to some minimal surface in space forms. Then there exists a real vector such that . So w.l.g. we can assume . So we have
Since , we see that and , which contradicts to the fact that and are linear independent. This finishes the proof. ∎
Similarly, by Theorem 2.5 we can assume without lose of generality that the normalized potential of a minimal surface in has the form
| (4.5) |
Theorem 4.3.
The normalized potential
with and all of being of the form (4.5), locally gives a family of Willmore surfaces , , such that , are conformally equivalent to minimal surfaces in and , are conformally equivalent to minimal surfaces in , and for all other , is a non-minimal Willmore surface in .
Proof.
The proof is the same as above theorem. So we omit it. ∎
4.3. On some dressing actions preserving minimal surfaces in &
Set
Then , , is a subgroup of . Note that if and only if .
Theorem 4.5.
-
(1)
The normalized potential
with and being of the form (4.4), locally gives a family of Willmore surfaces conformally equivalent to minimal surfaces in .
-
(2)
The normalized potential
with and being of the form (4.5), locally gives a family of Willmore surfaces conformally equivalent to minimal surfaces in .
Proof.
By Theorem 2.5 and setting and respectively, we obtain (1) and (2) respectively. ∎
Remark 4.6.
5. Examples of Minimal surfaces in
In this section, we will illustrate the dressing actions for isotropic minimal surfaces in in terms of the formula in above section. dressing actions of the Veronese 2-spheres give many explicit examples of Willmore two-spheres in . In particular, we obtain many examples of complete minimal surfaces in , defined on disks, annulus or Moebius strips. By these examples we show that there exists complete minimal disks with their Willmore energy tending to zero. Moreover, by consider the Willmore deformations of generalizations of Veronese two-spheres in , we obtain complete minimal disks with arbitrary Willmore energy. Some new non-oriented minimal Moebius strips are also obtained in this way.
We will first recall a Weierstrass type formula for isotropic (Willmore) surfaces in [54]. Then we will discuss in details of two kind of one-parameter group action on isotropic surfaces in . With help of the formula, we derive many explicit examples with expected properties in Section 5.3-5.6.
5.1. The Weierstrass formula for isotropic surfaces in
The following formula provides all explicit examples in this paper. So we include it here for readers’ convenience.
Theorem 5.1.
[54] Let be a Riemann surface, and let
| (5.1) |
Here are meromorphic functions on satisfying Then the corresponding Willmore surface is of the form , with
| (5.2) |
and
| (5.3) |
is an (possibly branched) isotropic Willmore surface in .
Moreover, a lift of the dual surface of is of the form
| (5.4) |
and .
Moreover we have
-
(1)
reduces to a point and is conformally equivalent to an isotropic minimal surface in , if and only if ;
-
(2)
Both and are conformally equivalent to (full) isotropic minimal surfaces in , if and only if there exists a non-zero, real, constant vector with , such that
(5.5) -
(3)
Both and are conformally equivalent to (full) isotropic minimal surfaces in , if and only if there exists a non-zero, real, constant vector with , such that
(5.6)
5.2. dressing action on isotropic surfaces in
Recall that for a isotropic surface in , its normalized potential has the form [54]
| (5.7) |
Then we have
By Theorem 4.2 and 4.3, when , we obtain a minimal surface in . When we obtain a minimal surface in .
Proposition 5.2.
We retain the notions in Theorem 5.1. Assume now furthermore that in (5.7) and set , with . Then
-
(1)
is conformally equivalent to a minimal surface in if and only if or ;
-
(2)
is conformally equivalent to a minimal surface in if and only if or ;
-
(3)
is not conformally equivalent to any minimal surface in any space form for any and .
Proposition 5.3.
We retain the notions in Theorem 5.1 and set .
-
(1)
Assume that and . Then is conformally equivalent to a minimal surface in for any .
-
(2)
Assume that and . Then is conformally equivalent to a minimal surface in for any .
5.3. The Veronese sphere and its Willmore deformations
Applying to the Veronese surface in , we obtain many new Willmore two-spheres in with the same Willmore energy. Moreover, we also obtain many examples of minimal surfaces in with Willmore energy taking every value in .
5.3.1. The Veronese sphere and its Willmore deformations
Proposition 5.4.
Let . Set
| (5.8) |
in (5.7). Let be the corresponding Willmore surface in . Set with . Then
| (5.9) |
and is an isotropic Willmore immersion with
| (5.10) |
and
| (5.11) |
-
(1)
for all . is conformally equivalent to for all . And for any , is conformally equivalent to if and only if or .
-
(2)
is conformally equivalent to the Veronese surface in when and is conformally equivalent to three complete minimal surfaces in on three open subsets of when . For any other , is a Willmore surface in not minimal in any space form.
-
(3)
When , consider the projection of into w.r.t :
(5.12) It has metric
and Gauss curvature
(5.13) on . Here and . Set
-
(a)
Set on . Then
-
(b)
is a proper, complete minimal disk with finite Willmore energy . Its Gauss curvature takes value in . In particular, it has bounded Gauss curvature. And is congruent to in the sense .
-
(c)
is a proper, complete minimal annulus with finite Willmore energy . Its Gauss curvature takes value in . In particular, it has bounded Gauss curvature.
-
(d)
Each of the three minimal surfaces intersects the infinite boundary of with a constant angle . The circles are the umbilical sets of the Willmore immersion .
-
(a)
Proof.
The equation (5.9) is a direct application of Theorem 4.2 and Theorem 5.1. When , we see that is a minimal immersion with constant curvature , hence it is the Veronese surface. It is well-known that Veronese two-sphere have Willmore energy . Since the Willmore energy of depends smoothly on and the Willmore energy of a Willmore two-sphere is for some [43], we see that .
Substituting into (5.9) we see that is conformally equivalent to . By Theorem 4.2, we see that (2) holds. From (5.9) we see that for any , it admits an symmetry given by . Here
To be concrete, we have . Moreover, for any , does not admit another symmetry. Otherwise, we will see that is a homogeneous Willmore two-sphere since it has two different symmetry. By [39, 21], it is conformally equivalent to the Veronese two-sphere, which is not possible. Therefore, is conformally equivalent to only if is isometric to , which by (5.11), if and only if or . By (5.9), is conformally equivalent to if . This finishes (1). And (2) comes from Theorem 4.2.
(3) comes from a lengthy but straightforward computation. Note that the properness of , comes from the fact that they have smooth boundary curves at infinity. ∎
Remark 5.5.
-
(1)
Note that K attains maximal value at and attains minimal value at (FIGURE 1). This means that the two circles on are exactly the umbilical sets on the Willmore surface (Compare also [4]).
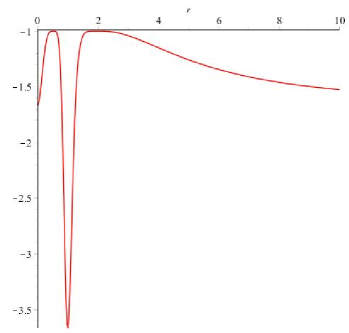
Figure 1. Curvature of -
(2)
The surface can be looked as a combination of three complete minimal surfaces in , with . To be concrete, when , the surface takes values in the upper connected component of , and tends to the boundary of when from the left side. When , it takes values at the boundary of . When , it takes values in the lower connected component of , and tends to the boundary of again when from the right side. When , it takes values at the boundary of again. When , it again takes values in the upper connected component of . When viewing the surface in , it blows up at the points . If we embed conformally into , the surface will be a smooth immersion on the whole . This is the well-known construction of compact Willmore surfaces due to Babich and Bobenko [4] for minimal surfaces in , where they constructed successfully Willmore tori with a umbilical line in via this way. It is hence not surprising that similar construction also works for Willmore two-spheres. To the authors’ best knowledge, the example in Proposition 5.4 should be the first explicit example of Willmore two-sphere in which is conformally equivalent to some minimal surface in on an open subset of (Note that this is not possible for Willmore two-spheres in except the round sphere [9]).
-
(3)
In [43], it is shown that all Willmore two-spheres with are expressed as twistor deformations of the Veronese surface in . Here we derive some explicit examples. Moreover, the generating curve of the equivariant Willmore two-sphere , , in is
So is full in for all and takes value in some when . This indicates that in general, equivariant Willmore two-spheres in have more complicated structures than equivariant minimal two-spheres in [26].
-
(4)
Different from the case of complete minimal surfaces in with finite Willmore energy, which always intersect the infinity boundary orthogonally as shown in [2], here the complete minimal surface intersect the infinity boundary with a constant angle not equal to .
5.3.2. minimal deformations of the minimal surface
Let us consider the minimal deformations of the minimal surface in given in (5.12), by use of which we obtain a lot of (non-congruent) complete minimal surfaces in .
Proposition 5.6.
Let . Set
| (5.14) |
in (5.7). Let be the corresponding Willmore surface in . Set with . Then
| (5.15) |
-
(1)
For every , is a Willmore immersion from to with and is oriented for all . Moreover, is conformally equivalent to for all
-
(2)
Set
Then is minimally immersed into on the points where , with metric
and curvature
In particular, set
Here we denote by and the two positive solutions to with 222Note that since for all .:
Here Then we obtain two complete minimal disks , and one complete minimal annulus in .
-
(3)
and are conformally equivalent to complete immersed, isotropic minimal disks and in . Moreover, and are isometrically congruent if and only if . is conformally equivalent to an immersed, complete, isotropic minimal annulus in .
-
(4)
When , tends to a branched double cover of a totally geodesic surface which is orthogonal to the equator .
-
(5)
When , . When , . There exists such that . Hence for every , there exists some such that .
Proof.
(1) and (2) come from direct computations, as shown in the proposition. (3) is obvious.
Now let’s consider (4). When , from (5.23) it is direct to see that tends to
which is exactly a branched double covering of a totally geodesic surface orthogonal to the infinity boundary of . Moreover, tends to the branched point . The equator divides into two parts: (containing ) and . Therefore tends to and tends to .
Finally, let’s consider (5). First we note that the Willmore energy of are
| (5.16) |
with , and and as shown in the proposition.
Since
when we have for
So when ,
So
On the other hand, numerical computation shows when ,
Since depends continuously on , we see that for any number , there exists some such that for . This finishes the proof. ∎
Remark 5.7.
It is interesting to ask whether there exists a complete minimal annulus in with . Moreover, what is the infimum of the Willmore energy of a complete minimal annulus in ?
5.3.3. minimal deformations of the Veronese two-sphere in
Similarly we can construct a family of minimal two-spheres in via the action on the Veronese two sphere in .
Proposition 5.8.
Let . Set
| (5.17) |
Set with . Then
| (5.18) |
-
(1)
For every , is conformally equivalent to an immersed isotropic minimal two-sphere in with ,
and
(5.19) -
(2)
descend to a minimal if and only if .
-
(3)
When , tends to a branched double covering of a totally geodesic round two-sphere of .
5.4. deformation of generalizations of Veronese two-sphere in
In [22], generalizations of Veronese two-sphere in are discussed. Here we consider the deformation of them, which will give more examples of complete minimal surfaces in , which will be important in Willmore energy estimates of complete minimal surfaces in .
Proposition 5.9.
Let . Set
| (5.20) |
in (5.7). Let be the corresponding Willmore surface in . Set with . Then
| (5.21) |
-
(1)
For every , is an oriented Willmore immersion from to with Willmore energy . is conformally equivalent to for all . And for any , is conformally equivalent to if and only if or .
-
(2)
is conformally equivalent to a minimal two-sphere in when and is conformally equivalent to three complete minimal surfaces in on three open subsets of when . For any other , Willmore surfaces in not minimal in any space form.
-
(3)
reduces to a non-oriented Willmore surface from , if and only if or , and for some . Here .
Proof.
The equation (5.21) comes from direct computations.
We need only to show that , since proofs of the rest of (1) and (2) are the same as Proposition 5.4. Since the Willmore energy of depends smoothly on and the Willmore energy of a Willmore two-sphere is for some [43], we have . By Theorem 3.1 of [26] (see also [6]), since the equivariant action here is .
Substituting into (5.21) shows that if and only if is even and or , which finishes the proof of (3). ∎
5.5. minimal deformations of another type of minimal surfaces in
It is natural to show the existence of complete minimal surfaces in with any Willmore energy by further generalization of the above examples.
Proposition 5.10.
Let . Let . Then its normalized potential can be given by setting
| (5.22) |
in (5.7). Set with . Then
| (5.23) |
-
(1)
For every , is an oriented Willmore immersion from to with Willmore energy and is conformally equivalent to .
-
(2)
Set
Then is minimally immersed into on the points where , with metric
and curvature
In particular, set
Here we denote by and the two positive solutions to
with . Then we obtain two complete minimal disks , and one complete minimal annulus in .
-
(3)
and are conformally equivalent to complete immersed, isotropic minimal disks and in . Moreover, and are isometrically congruent if and only if . is conformally equivalent to an immersed, complete, isotropic minimal annulus in .
-
(4)
For every fixed , when , tends to a branched cover of a totally geodesic surface which is orthogonal to the equator .
-
(5)
When , .
-
(6)
Set . Then when is large enough,
(5.24) Moreover, when , . In particular for every , there exists some with , and , such that .
Proof.
(1). By Proposition 5.9, we have .
The proof of (2)-(4) is the same as Proposition 5.6. So let’s focus on (5) and (6). First we note that the Willmore energy of are (Here )
| (5.25) |
with , and and as shown in the proposition.
It is direct to check that
When we have for
So when ,
So for every fixed ,
The key point of (6) is the technical estimate (5.24). We will leave the proof of it for the appendix. ∎
5.6. Non-oriented examples of minimal Moebius strips in
In this subsection, we consider some non-oriented minimal surfaces in , which is based on the work of [20] and [54].
Set
| (5.26) |
We have
| (5.27) |
with
So has exactly two branched points and . Consider , we have
As a consequence, induces a branched Willmore : is a Willmore with Willmore energy and one branched point at . For more discussions on singularities and branched points of Willmore surfaces, see [5, 42, 30, 31, 32, 46].
Set and
Set We see that
-
(1)
is a complete minimal Moebius strip in with .
-
(2)
is a branched minimal disk in with Willmore energy and one branched point .
It is natural to ask whether the complete minimal Moebius strip takes uniquely the minimum of the Willmore energy among all complete minimal Moebius strips in , .
6. Remarks on the non-rigidity of isotropic surfaces in
Finally we would like to discuss briefly some simple applications of the W-deformations on the study of stability problems of Willmore surfaces and minimal surfaces. More detailed study will be done in a separate publication, since it will involve many other independent calculations. We refer to [45, 48, 51, 55] for more details on this topics, in particular Theorem 3.3.1 and Corollary 3.3.1 of [48].
Since for isotropic surfaces in , we have an explicit W-representation formula, we see that W-deformations are globally defined if the surfaces are globally defined. From this we see immediately that they are Willmore non-rigidity since they admits non-trivial Willmore Deformations.
Theorem 6.1.
Let be an isotropic (hence Willmore) surface from a closed Riemann surface with its conformal Gauss map in . Then is Willmore non-rigid. That is, it admits conformal Jacobi fields different from the conformal Killing fields which come from conformal transformations of .
Proof.
We first consider the case that is not conformally equivalent to a minimal surface in . By Theorem 3.7, the condition that the conformal Gauss map of is in , is equivalent to saying that it is coming from a dressing of some minimal surface in . Therefore by Theorem 5.1, there exists a family of Willore surfaces such that is real analytic in and and is a minimal surface in . So does not come from any conformal transformations of and the Jacobi field of is not a conformal Killing field.
Now consider the case that is conformally equivalent to a minimal surface in . Without lose of generality, we assume has the potential as the form in Proposition 5.2. By Proposition 5.2 and Theorem 5.1, there exists globally a family of Willore surfaces such that is real analytic in and is not conformally equivalent to any minimal surface in when . So does not come from any conformal transformations of and the Jacobi field of is not a conformal Killing field.
∎
For minimal surfaces in , we also have the following
Theorem 6.2.
Let be an isotropic minimal surface from a closed Riemann surface . Then is non-rigidity. That is, it admits Jacobi fields different from the Killing fields which come from isometric transformations of .
Proof.
Assume without loss of generality the normalized potential of is of the form (5.1) with . Let
be a one-parameter subgroup of . The one-parameter family of normalized potentials has the same form as in (5.1), except the functions becomes . Substituting into (5.2), we obtain the Willmore family derived by . We have that is real analytic in and for every , is a minimal surface in .
Let tends to . We have that tends to a conformal map into . As a consequence, can not be derived by an isometric transformations of . Hence the Jacobi field of is not a Killing field of . ∎
7. Appendix: Proof of (5.24)
Set , . Set with . Let and be the two solutions to
We can rewrite as
Then (5.24) follows from the following Lemma.
Lemma 7.1.
-
(1)
When , ; In particular
-
(2)
On , When ,
(7.1) -
(3)
Set . Then is tending to
when
-
(4)
with and
Moreover, when ,
-
(5)
When is large enough,
Proof.
(1). From and , we have
From this,
(2). Since So on , , from which we have . And (7.1) follows from this and the fact that .
(3). Since , we have
Since , we have
as . (3) follows from this.
(4) First we have . So
By substituting , we have
When , and hence This finishes (4).
(5) As a consequence, we have
for some when , which finishes (5). ∎
Reference
- [1] Alexakis, S., Mazzeo, R. Renormalized area and properly embedded minimal surfaces in hyperbolic 3-manifolds, Comm. Math. Phys. 297 (2010), no. 3, 621-651.
- [2] Alexakis, S., Mazzeo, R. Complete Willmore surfaces in with bounded energy: boundary regularity and bubbling. J. Differential Geom. 101 (2015), no. 3, 369-422.
- [3] Anderson, M., Complete Minimal Varieties in hyperbolic space. Invent. Math. 69. (1982), 477-494.
- [4] Babich, M., Bobenko, A. Willmore tori with umbilic lines and minimal surfaces in hyperbolic space, Duke Math. J. 72 (1993), no.1, 151-185.
- [5] Bernard, Y., Rivière, T, Singularity removability at branch points for Willmore surfaces, Pacific J. Math., Vol. 265, No. 2, 2013.
- [6] Barbosa J L. On minimal immersions of into , Trans. Amer. Math. Soc., 1975, 210, 75-106.
- [7] Bobenko, A, Heller, S., Schmitt, N. Minimal n-Noids in Hyperbolic and Anti-de Sitter 3-Space, Proceedings of The Royal Society A: Mathematical, Physical and Engineering Sciences, vol. 475, no. 2227, 2019, p. 20190173.
- [8] Brander, D., Wang, P. On the Björling problem for Willmore surfaces, J. Diff. Geom., 108 (2018), 3, 411-457.
- [9] Bryant, R. A duality theorem for Willmore surfaces, J. Diff.Geom. 20 (1984), 23-53.
- [10] Burstall, F., Ferus, D., Leschke, K., Pedit, F., Pinkall, U. Conformal geometry of surfaces in and quaternions, Lecture Notes in Mathematics 1772. Springer, Berlin, 2002.
- [11] Burstall, F., Pedit, F., Pinkall, U. Schwarzian derivatives and flows of surfaces, Contemporary Mathematics 308, 39-61, Providence, RI: Amer. Math. Soc., 2002.
- [12] Burstall, F., Quintino, A. Dressing transformations of constrained Willmore surfaces, Commun. Anal. Geom. 22, 469-518 (2014).
- [13] Calabi, E. Minimal immersions of surfaces in Euclidean spheres, J. Diff.Geom. 1(1967), 111-125.
- [14] Coskunuzer, B. Minimal planes in hyperbolic space. Comm. Anal. Geom. 12(4), 821-836 (2004).
- [15] Coskunuzer, B. Generic uniqueness of least area planes in hyperbolic space. Geom. & Top. 10, 401-412 (2006).
- [16] Dorfmeister, J. F., Inoguchi, J., Kobayashi, S.Constant mean curvature surfaces in hyperbolic 3-space via loop groups, J. Reine Angew. Math., 686(2014), 1-36.
- [17] Dorfmeister, J., Pedit, F., Wu, H., Weierstrass type representation of harmonic maps into symmetric spaces, Comm. Anal. Geom. 6 (1998), 633-668.
- [18] Dorfmeister, J., Wang, P. Weierstrass-Kenmotsu representation of Willmore surfaces in spheres, Nagoya Mathematical Journal, to appear. doi:10.1017/nmj.2020.6.
- [19] Dorfmeister, J., Wang, P. Willmore surfaces in spheres: the DPW approach via the conformal Gauss map. Abh. Math. Semin. Univ. Hambg. 89 (2019), no. 1, 77-103.
- [20] Dorfmeister, J., Wang, P. On symmetric Willmore surfaces in spheres II: the orientation reversing case, Differential Geom. Appl. 69 (2020), 101606.
- [21] Dorfmeister, J., Wang, P. Classification of homogeneous Willmore surfaces in , Osaka. J. Math.,Vol. 57 No.4(2020).
- [22] Dorfmeister, J., Wang, P., Classification of equivariant Willmore in , in preparation.
- [23] Drukker, N., Gross, D., Ooguri, H., Wilson Loops and Minimal Surfaces. Phys. Rev. D (3) 60(12), 125006 (1999).
- [24] Guest, M.A., Ohnita, Y. Group actions and deformations for harmonic maps , Journal of the Mathematical Society of Japan, 1993, 45(4): 671-704.
- [25] Ejiri, N. The index of minimal immersions of into . Math. Z. 184(1) (1983) 127-132.
- [26] Ejiri N., Equivariant minimal immersions of into , Trans. Amer. Math. Soc., 1986, 297(1): 105-124.
- [27] Ejiri, N. Willmore surfaces with a duality in , Proc. London Math. Soc. (3), 1988, 57(2), 383-416.
- [28] Hélein, F. Willmore immersions and loop groups, J. Differ. Geom., 50, 1998, 331-385.
- [29] Ishihara T. Harmonic maps of nonorientable surfaces to four-dimensional manifolds, Tohoku Math. J., 1993, 45(1): 1-12.
- [30] Kuwert, E., Schätzle, R. Removability of point singularities of Willmore surfaces, Ann. of Math. (2) 160 (2004), 315-357.
- [31] Kuwert, E., Schätzle, R. The Willmore functional, Topics in modern regularity theory, 1-115, CRM Series, 13, Ed. Norm., Pisa, (2012).
- [32] Lamm, T., Nguyen, H. T. Branched Willmore spheres, J. Reine Angew. Math. 701 (2015), 169-194.
- [33] Lawson, H. B. Jr. Complete minimal surfaces in , Ann. of Math. (2) 92 1970 335¨C374.
- [34] Leschke, K.; Moriya, K. Simple factor dressing and the López-Ros deformation of minimal surfaces in Euclidean 3-space, Math. Z. 291 (2019), no. 3-4, 1015-1058.
- [35] Li, H.Z. Willmore surfaces in , Ann. Global Anal. Geom. 21 (2002), no. 2, 203-213.
- [36] Lin, F.H. On the Dirichlet problem for the minimal graphs in hyperbolic space, Invent. Math. 96, 593-612 (1989).
- [37] López, F.J., Ros, A. On embedded complete minimal surfaces of genus zero, J. Differ. Geom. 33(1), 293-300 (1991).
- [38] Ma, X. Willmore surfaces in : transforms and vanishing theorems, dissertation, Technischen Universität Berlin, 2005.
- [39] Ma, X., Pedit, F., Wang, P. Möbius homogeneous Willmore 2-spheres, Bull. Lond. Math. Soc. 50 (2018), no. 3, 509-512.
- [40] Maldacena, J, Wilson loops in Large N field theories, Phys. Rev. Lett. 80, 4859 (1998).
- [41] Marques, F., Neves, A. Min-Max theory and the Willmore conjecture, Ann. of Math. 179 (2014), no. 2, 683-782.
- [42] Michelat, A., Rivière, T. The Classification of Branched Willmore Spheres in the 3-Sphere and the 4-Sphere, arXiv:1706.01405.
- [43] Montiel, S. Willmore two spheres in the four-sphere, Trans. Amer.Math. Soc. 2000, 352(10), 4469-4486.
- [44] Musso, E. Willmore surfaces in the four-sphere, Ann. Global Anal. Geom. Vol 8, No.1(1990), 21-41.
- [45] Ndiaye, C. M., Schätzle, R. Explicit conformally constrained Willmore minimizers in arbitrary codimension, Calc. Var. Partial Differential Equations 51 (2014), no. 1-2, 291-314.
- [46] Rivière, T. Analysis aspects of Willmore surfaces, Invent. Math. 174 (2008), no. 1, 1-45.
- [47] Schätzle, R.The Willmore boundary problem, Cal. Var. PDE, (2010), 37, pp. 275-302.
- [48] Simons, J. Minimal varieties in Riemannian manifolds. Ann. of Math. (2) 88 1968 62-105.
- [49] Terng, C., Uhlenbeck, K. Bäacklund transformations and loop group actions. Commun. Pure Appl. Math., Vol. 53, No.1, 1-75 (2000).
- [50] Uhlenbeck, K. Harmonic maps into Lie groups (classical solutions of the chiral model), J. Diff. Geom. 30 (1989), 1-50.
- [51] Urbano, F.Minimal surfaces with low index in the three-dimensional sphere, Proc. Amer. Math. Soc. 108 (1990), no. 4, 989-992.
- [52] Wang, C.P. Moebius geometry of submanifolds in . Manuscripta Mathematica, 1998, 96(4): 517-534.
- [53] Wang, P. Willmore surfaces in spheres via loop groups III: on minimal surfaces in space forms, Tohoku Math. J. (2) 69 (2017), no. 1, 141-160.
- [54] Wang, P., A Weierstrass type representation of isotropic Willmore surfaces in , in preparation.
- [55] Weiner, J. On a Problem of Chen, Willmore, et al. Indiana Univ. Math. J. 27 No. 1 (1978), 19-35.
- [56] Xia, Q.L., Shen, Y.B. Weierstrass Type Representation of Willmore Surfaces in . Acta Math. Sinica, Vol. 20, No. 6, 1029-1046.