Waist inequality for 3-manifolds
with
positive scalar curvature
Abstract.
We construct singular foliations of compact three-manifolds with scalar curvature by surfaces of controlled area, diameter and genus. This extends Urysohn and waist inequalities of Gromov-Lawson and Marques-Neves.
1. Introduction
Let be a compact three-manifold with positive scalar curvature . We will show that admits a singular foliation by surfaces of controlled size.
Theorem 1.1.
There exists a Morse function , such that for every and each connected component of we have
-
(a)
if is non-orientable and if is orientable;
-
(b)
;
-
(c)
.
Additionally, if is homeomorphic to or connected sum of ’s then we can assume .
For the area and genus only we obtain nearly sharp bounds in Theorem 1.3. The diameter is the extrinsic diameter of :
We expect that a similar result should hold for foliations with controlled intrinsic diameter.
Existence of a map into a graph with the diameter of fibers bounded by was proved in [GL83, Corollary 10.11] and [Gro20b] (see also [CL20b]). For manifolds with and scalar curvature Marques and Neves proved a sharp bound on the area of maximal fiber in an optimal Morse foliation of [MN12]. In [Gro18] Gromov suggested that by combining methods of [GL83] and [MN12] it should be possible to obtain a foliation with control on diameter and area of connected components of the fibers. We show that this is indeed the case.
Note that it is not possible to obtain a version of Theorem 1.1 with area or diameter of the connected component of replaced by area or diameter of the whole fiber . Indeed, one can construct manifolds that are hard to cut by considering Gromov-Lawson connect sums of -spheres corresponding to large trees or expander graphs (see [Mon15], [PS19]).
Combining Theorem 1.1 with arguments from [LZ16] we obtain a foliation of by 1-cycles of controlled length.
Theorem 1.2.
Let be a closed three-manifold with positive scalar curvature . There exists a map , such that
for all .
By applying the min-max arguments (see [Pit76], [NR04]) to the family of curves constructed in the proof of Theorem 1.2 we obtain that contains a stationary geodesic net of length bounded by .
If we do not require that fibers have controlled diameter, then we can get the following better bounds for the genus and the area using estimate of Marques and Neves for the area of index minimal surface [MN12] (cases (a) and (b) were observed in [Gro20a, 3.13B]).
Theorem 1.3.
Suppose has positive scalar curvature . For every the following holds.
-
(a)
If is homeomorphic to then there exists a Morse function , such that every non-singular fiber is a union of 2-spheres of area at most .
-
(b)
If is homeomorphic to , then there exists a Morse function , such that every non-singular fiber is a union of 2-spheres of area at most .
-
(c)
More generally, there exists a graph and a continuous map , such that every fiber has genus and area .
Our paper is organized as follows. In section 2, we use the min-max existence theory of minimal surfaces to decompose any closed three-manifold with positive scalar curvature into regions whose boundary components are minimal surfaces of controlled area, diameter and with genus bounded by the Heegaard genus of the prime factors of , or, for non-oreitnable prime factors, minimal projective planes. In section 3, we recall some facts about mean curvature flow with surgeries and use them to propagate area bounds from the boundary of such region to a foliation parametrized by a graph. In the same section we prove Theorems 1.3 and 1.2. Finally, in Section 4, we show how to modify such foliation by a cut-and-paste procedure so that we may guarantee, simultaneously, controlled area, genus, and diameter; and show how the main result follows from this.
Acknowledgements We would like to thank the Institute of Advanced Study and Fernando C. Marques for organizing the 2018-2019 Special Year on Variational Methods in Geometry, during which our collaboration started. We are grateful to Misha Gromov for suggesting Theorem 1.3 to us and numerous other valuable suggestions. We are grateful to Robert Haslhofer for useful conversations. We want to thank Zhichao Wang for pointing out mistakes in an earlier version of this paper and for multiple valuable comments. Y.L. was supported by NSERC Discovery grant and NSERC Accelerator Award. D.M. was supported by NSF grant DMS-1737006, DMS-1910496, and a Sloan Fellowship.
2. Minimal surfaces and decomposition of 3-manifolds
2.1. Area and diameter estimates.
We summarize known area and diameter bounds for two-sided minimal surfaces on manifolds of uniformly positive scalar curvature .
Theorem 2.1 (Area Estimates).
Let be a manifold with scalar curvature and suppose is a closed two-sided minimal surface.
-
(a)
Suppose is stable. Then and or and .
-
(b)
If is orientable and has index 1, then .
-
(c)
If is a minimal 2-sphere of index 1, then .
-
(d)
If and has index , then .
Proof.
By Yau [Yau87], since is two-sided and has index 1:
where is conformal map from to -sphere and is a conformal automorphism of .
We will also need a free boundary version of this estimate that can be found in Ambrozio [Amb15].
Theorem 2.2.
Let be a manifold with boundary and scalar curvature . Suppose is a properly embedded free boundary stable minimal disk whose boundary lies on a mean convex boundary component of . Then, .
Theorem 2.3 (Inradius Estimate).
Let be a manifold with scalar curvature and suppose is a two-sided embedded stable minimal surface of with boundary . Then for all the intrinsic distance of , , satisfies:
Corollary 2.4 (Diameter Estimate).
Let be a manifold with scalar curvature . Suppose is a closed embedded two-sided minimal surface on .
-
(a)
If is stable, then .
-
(b)
If has index 1, then .
Proof.
Part follows directly from the diameter estimate in (2.3).
Part also follows from (2.3), as in [LZ16, Proposition 2.2]. Indeed, we can pick two points and at a distance and consider a geodesic ball with . Since has index either the connected component of that contains or the connected component that contains must be stable. Then the result follows from the estimate for the filling radius. ∎
2.2. Decomposition of 3-manifolds
Throughout this section, suppose is a closed three-manifold and metric on of positive scalar curvature . To prove Theorem 1.1, note that we may restrict ourselves to the case when the metric is bumpy [Whi17].
We start by cutting along disjoint closed embedded minimal surfaces to obtain the following decomposition result.
Definition 2.5.
A 3-manifold with non-empty boundary is geometrically prime if
-
(1)
is diffeomorphic to a handlebody with some 3-balls removed;
-
(2)
there are no closed embedded minimal surfaces in the interior of ;
-
(3)
there exists a closed connected component (that we’ll call “large”) of that is either mean convex or minimal of Morse index ;
-
(4)
is either empty or a disjoint union of stable minimal 2-spheres.
We will also need to define a non-orientable version of a geometrically prime region.
Definition 2.6.
A 3-manifold with non-empty boundary is non-orientable geometrically prime if
-
(1)
is diffeomorphic to with some 3-balls removed;
-
(2)
there are no closed embedded minimal surfaces in the interior of ;
-
(3)
there exists a closed connected component (that we’ll call “large”) of that is either mean convex or minimal of Morse index ;
-
(4)
is a disjoint union of one stable minimal projective plane and stable minimal 2-spheres.
Theorem 2.7 (Decomposition Theorem).
Let be a closed three-manifold with a bumpy metric of scalar curvature . Then, there exist closed embedded disjoint minimal surfaces on such that:
-
(a)
;
-
(b)
is a disjoint union of geometrically prime and non-orientable geometrically prime regions.
Proof.
Since the scalar curvature is positive the only orientable two-sided stable minimal surfaces in are 2-spheres. Let be a maximal collection of pairwise disjoint two-sided stable minimal 2-spheres and projective planes. Since the metric is bumpy the set of such spheres and projective planes is finite (possibly empty).
Each connected component of is irreducible, since otherwise we could find a stable minimal sphere in its interior by [MSY82].
First consider orientable components . By classification of 3-manifolds of positive scalar curvature it follows that each orientable component is a spherical space form with possibly some balls removed (all the boundary components are stable minimal 2-spheres).
If with some balls removed, then by [KLS19, Theorem 17] either there is an index minimal Heegaard torus, or there is a stable minimal with stable double cover (note that although [KLS19, Theorem 17] is stated for closed manifolds the proof applies to the case of a manifold with boundary consisting of stable minimal spheres). In the second case we cut along the minimal stable to obtain a 3-sphere with some balls removed and such that all boundary components are stable. Applying min-max argument we obtain an index 2-sphere in the interior of .
It follows from Thurston’s Elliptization Conjecture proved by Perelman that every orientable irreducible 3-manifold of positive scalar curvature is a Seifert fiber space with at most exceptional fibers and therefore admits a Heegaard splitting of genus less than or equal to (see [Mor88], [BCZ91]).
Suppose is homeomorphic to a spherical space form with some balls removed. We have that the Heegaard genus of satisfies . By [KLS19, Theorem 17] there exists a minimal surface of Morse index 1 that is isotopic to the Heegaard splitting of .
Now consider non-orientable components. If is not orientable then it must be homeomorphic to with some balls removed by [Eps61, Theorem 5.1]. In this case we cut along a maximal collection of disjoint stable and index 1 projective planes and 2-spheres to obtain a collection each homeomorphic to with some balls removed or with some balls removed. If is homeomorphic to with some balls removed, then it is geometrically prime. We claim that if is homeomorphic to with some balls removed then it is non-orientable geometrically prime. Indeed, if it has an index two-sphere as one of the boundary components, then we can minimize in the isotopy class ([MSY82]) to obtain a stable minimal 2-sphere in the interior. Similarly, if it has two or more index 1 projective planes as boundary components, then we can obtain a stable minimal projective plane in the interior. If all boundary components are stable then by the min-max construction of [KLS19] there exists an index minimal in the interior of . This contradicts maximality of the collection of minimal spheres and projective planes.
Hence, each connected component has exactly one boundary component that is a minimal surface of index . We claim that now has no minimal surfaces in its interior. Consider a mean convex surface obtained by small perturbation of to the inside of . Then the level set flow applied to will either become extinct in finite time or will converge to a disjoint collection of finitely many stable minimal surfaces as by the result of White [Whi00]. Since is homeomorphic to a handle body or with some balls removed and we already cut the manifold along a maximal collection of disjoint stable minimal spheres and projective planes we have that the flow converges to . By the Maximum Principle [Ilm92] has no smooth embedded minimal surfaces in its interior. ∎
In our proof, geometrically prime regions will be decomposed further along stable minimal disks with free boundary along the large components. The following Proposition follows from classical results of Meeks and Yau [MY80, MY82]:
Proposition 2.8.
Suppose is a geometrically prime region with large component which is mean convex and has genus at least 1. Let be a non-contractible simple closed curve. Then, there exists a properly embedded free boundary stable minimal disk with homotopic to .
3. Mean curvature flow and tree foliations
The foliation in Theorem 1.1 is constructed using Mean Curvature Flow with surgery with certain modifications to control the diameter. In this section we describe how to construct the foliation of a geometrically prime or non-orientable geometrically prime region with controlled genus and area. In the next section we modify this foliation, so that the diameter is also controlled.
3.1. Mean Curvature Flow with surgery.
We start with an overview of results from the literature. We will adopt the terminology of Haslhofer-Kleiner [HK17] developed for domains of Euclidean space, which was later adapted to mean-convex domains of general three-manifolds by Haslhofer-Ketover [HK19]. Another relevant reference is Brendle-Huisken [BH18].
We recall several definitions and the main results form [HK17, HK19] that we will use. The first important definition is of a smooth -Andrews flow, for any . These consist, basically, of smooth families of mean convex domains , , with boundaries moving by mean curvature flow and with the property that and which every point in is -non-collapsed in the sense of Andrews [And12] (See Definition 7.1, [HK19]).
The whole point of performing surgeries comes from the fact that such smooth -Andrews cannot be extended indefinitely in time, as singularities can occur. To avoid those, one looks for regions of high-curvature and seeks to replace them before a singularity can form. To make that statement precise, one defines what it means for to have a strong -neck with center and radius at time . Loosely speaking, this means that an appropriate parabolic rescaling of centered at is -close to the evolution of a solid round cylinder in with radius 1 at (See Definition 7.2, [HK19]). The notion of replacing the final time slice of a strong -neck by a pair of standard caps (surgery) can then be defined rigorously, as in the discussion immediately after Definition 7.2 of [HK19].
With the above terminology, we define a -flow as follows:
Definition 3.1 (Definition 1.3, [HK17]).
An -flow is a collection of finitely many smooth -Andrews flows in such that
-
(1)
for each , the final time slices of some collection of disjoint strong -necks are replaced by pairs of standard caps as described in Definition 2.4 of [HK17], giving some domains .
-
(2)
the initial time slice of the next flow, is obtained from by discarding some connected components.
-
(3)
all necks in item (1) have radius bounded from above and below by a constants depending on .
When the initial data is mean-convex, one can give a more accurate description of the regions where surgery occurs and also the regions which will be discarded after surgery. This is encompassed in the following notion of an -flow: We say that an -flow is an -flow if (see Definition 1.17, [HK19])
-
(1)
.
-
(2)
Besides the neck parameter , we have three curvature-scales , to which we refer as the trigger, neck, and thick curvature.
-
(3)
everywhere, and surgery and/or discarding occurs precisely at times when at some point.
-
(4)
The collection of necks replaced by caps is a minimal collection of solid -necks of curvature which separates the set from in .
-
(5)
The initial condition after a surgery, is obtained by discarding precisely those connected components with everywhere.
With the above terminology, we may now state the main existence result for -flows in [HK19], which, in turn, is an adaptation of the existence theorem in [HK17]:
Theorem 3.2 (Existence Theorem, [HK19, Thm. 7.7]).
Let be a mean convex domain. Then, for every , choosing sufficiently small and , there exists an -flow , with initial condition , for some choice of .
Next, we have the canonical neighborhood theorem, which gives a description of the regions with high curvature.
Theorem 3.3 (Canonical neighborhood theorem,[HK19, Thm. 7.6]).
For every there exists such that if is an -flow with small enough and , then every spacetime point with is -close to either (a) an ancient -Andrews flow in or (b) the evolution of a standard cap preceded by the evolution of a round cylinder .
A corollary of the canonical neighborhood theorem is the following description of the discarded components by surgeries:
Corollary 3.4.
For small enough, any -flow satisfying the hypothesis of Theorem 3.3 has discarded components diffeomorphic to the three-disk or solid torus .
Remark 3.5.
By picking the curvature parameters large enough, we may always ensure that, at the neck scale , the ambient space looks as close as we want to Euclidean. In this situation, we may also ensure that there will exist a 2-Lipschitz map from any strong -neck to the Euclidean cylinder of radius . In addition, as observed in Corollary 8.9 of [BHH] and in [BHH19], each discarded component is either a convex sphere of controlled geometry, a capped-off chain of -necks, or an -loop. In each case, one may chop them into a collection of spheres, each contained in a small ball that can be mapped to a ball in of radius by a 2-bilipschitz diffeomorphism.
3.2. Mean Curvature flow in geometrically prime regions
Let be a geometrically prime or non-oriented geometrically prime region obtained from Theorem 2.7, and let , where is the large component and are stable minimal spheres or projective planes (note that might be zero). Since is a two-sided minimal surface of Morse index 1, we may apply a small inward deformation to the inside of to obtain a mean convex surface using the lowest eigenfunction of the stability operator (see proof of Theorem 3.1 in [HK19]). By Theorem 3.2, for , choosing and there will exist a -flow with for which the canonical neighborhood theorem applies. We prove:
Proposition 3.6.
Given , there exists a large such that, after making smaller and larger if necessary, there exists -flow with , such that
-
(a)
The final slice is either empty, if , or consists of smooth connected mean-convex surfaces which lie at distance at most from the minimal stable boundaries .
-
(b)
The points of which are not in , , are precisely the points belonging to discarded or caped components of the surgery process. In addition, the set
has volume at most .
Proof.
Our argument is in the vein of Theorem 8.1 in [HK19]. Let us first consider the case when , that is, . Since there are no closed stable minimal surfaces in the interior of , by a result of White [Whi00], the level-set flow must become extinct in finite time, say ; that is, . Because any mean curvature flow with surgery starting at is also a family of closed sets that is a set-theoretic subsolution for the level-set flow, in the terminology of Ilmanem [Ilm94], and the level-set flow is the maximal set-theoretic subsolution, we get an a priori bound for the extinction time of any mean curvature flow with surgeries starting at . Thus, given , we may select and so that the -flow starting at will be sufficiently close to the level-set flow in the Hausdorff sense so that all the discarded regions by the flow will have area summing up to at most .
Now, we assume . We fill in by gluing three-disks to the boundaries while maintaining their minimality and stability. By doing this we obtain a domain with mean-convex boundary which contains stable minimal surfaces , but no other stable minimal surfaces in the region between and . Consider the level-set flow ([CGG91, ES91]) starting at and let
By the barrier principle, since are minimal, they will be contained in for all and thus in . Additionally, by Theorem 11.1 of White [Whi00], has finitely many connected components and the boundary of each one of them is a stable minimal surface. Since there is no stable minimal surface in region between of , and , we conclude that
By the same theorem of White [Whi00], the convergence of to is smooth as .
Thus, given , we may pick such that consists of a union of graphical surfaces on a -neighborhood of . We consider a sequence of -flows on with initial condition , and thick curvature thresholds .
Since the initial domain is kept fixed and the thick curvatures tend to infinity as , by the work of Lauer [Lau13], we have that the above sequence of flows with surgery converge to the level set flow in the Hausdorff sense. Thus, picking sufficiently large, we have an -flow that satisfy the desired hypothesis. ∎
3.3. Tree foliations.
To prove Theorem 1.1, it will be convenient to introduce a certain type of foliations of geometrically prime manifolds that are parametrized by a -dimensional oriented tree . This definition can be suitably extended to general three-manifolds by considering more general graphs, but we will not use such definition and will skip it entirely.
Definition 3.7.
Let be an oriented tree with vertices of degree , or . A family of surfaces is a tree foliation of if there exists a continuous map and continuous orientation preserving map , such that
-
(a)
for each surface is connected;
-
(b)
is the unique vertex , called the root, of of degree that has an edge directed away from it;
-
(c)
If is a vertex of degree , then is a point or a connected component of the boundary of ;
-
(d)
Let denote the interior of an edge of . Then for each edge the family gives a smooth foliation of ;
-
(e)
For each vertex of degree or is a union of a smooth closed connected surface and a smooth connected surface with boundary . If is an edge adjacent to , then away from surfaces , , converge smoothly and graphically to a subset of as .
We use mean curvature flow with surgery to prove existence of a tree foliation of a geometrically prime 3-manifold with area and genus controlled in terms of area and genus of the large boundary component. Additionally we would like surfaces in the foliation to satisfy certain conditions on their mean curvature.
Definition 3.8.
Let be a tree foliation of with , as in Definition 3.7. We say that the foliation is mean convex on if for every the set consists of a disjoint union of smooth mean-convex surfaces with mean curvature vector positively oriented with respect to .
Definition 3.9.
Given any , we will say that a set is -small if is a union of finitely many disjoint open intervals and for each we have , where denotes the tubular neighborhood taken in with respect to the metric .
The main result of this section is the existence of such foliation on geometrically prime 3-manifolds with the following properties:
Proposition 3.10.
Let be a geometrically prime or non-oriented geometrically prime 3-manifold and let denote the large boundary component of . For every there exists a tree foliation , such that
-
(1)
-
(2)
Moreover, the foliation is mean convex on for an -small set .
Remark 3.11.
Proof.
We will start by proving slightly weaker version of the proposition: Given , there exists a tree foliation , such that
-
(1)
-
(2)
which is mean convex on for an -small set .
The proof follows essentially by flowing the large component of by mean curvature flow, which is area-decreasing and does not increase genus (even after surgeries). Because of potential surgeries and components getting discarded, we will need to introduce a procedure to foliate the surgery and discarded regions (without increasing the genus or area by more than ).
First, let’s set up the mean curvature flow with surgeries. We use the notation and apply the existence results of Section 3.2 on mean curvature flow with surgeries starting at the large component of . Let , , be the smooth flows that comprise the flow with surgeries (Definition 3.1) and the respective surgery times. We may assume is sufficiently small and is chosen sufficiently large so that is a disjoint union of spheres, each lying in a small tubular neighborhood and being graphical over a stable minimal surface in . We may extend the family to the interval by defining a smooth isotopy of each connected component of to the corresponding minimal surface .
We now give an informal description of how we derive the foliation . First consider outside of small neighborhood of surgery times . For each family , we let to be smooth families of connected components of parametrized by a disjoint union of intervals . From these intervals we start building edges of the graph , which for the moment are disconnected.
At a surgery time, the replacement of a neck with two standard caps occurs in a small ball, where the metric is nearly Euclidean and the neck is close to a standard cylinder. For each such replacement we add a vertex to the graph and define surface that is equal to the the union of the connected component that contains the neck and a small disc in the middle of the neck/cylinder. This process starts connecting the edges of the graph corresponding to the intervals : we define deformations of the unions of each of the half-cylinders with into the corresponding standard cap. Proceeding this way for each neck-caps replacement we obtain the union of connected components of for some slightly larger than and discarded components of . For each connected component of the discarded part we define a tree foliation that ends in a collection of points. This can be done since the discarded part has very small area.
Note that in this procedure, depending on whether the neck-caps surgery disconnects a component of , the vertex will be of degree bigger than 1, and potentially great than 3. To account for this and to have only vertices with degree at most 3, we will change the above procedure slightly by hand by gluing only one disk at a time for every surgery time where several neck-caps replacements take place. We describe the construction in more detail below.
Let be a small constant sufficiently smaller than . Define maps , so that the fibers , , are a smooth family of connected surfaces evolving by mean curvature flow. The map is defined so that .
It remains to describe the family of surfaces for , that is, as the family goes through a surgery. These surgeries can be of two types: neck-caps replacements or discarding components.
Vertices corresponding to neck-caps surgeries. We define vertices corresponding to surgeries of the mean curvature flow and the families of surfaces parametrized by neighborhoods of the vertices in the tree . Fix a surgery time . Let be the set of disjoint balls so that is obtained by replacing -necks in balls by pairs of standard caps. is then obtained from by discarding small connected components.
To ensure the graph only has vertices with degree at most 3, we will deal with each separately. We pick a separation time sufficiently small so that the evolution of smooth mean curvature flow of and exists for and it is graphical over and , correspondingly. By Remark 3.5, for each , we have maps , such that:
-
(1)
is a -bilipschitz diffeomorphism onto its image in ;
-
(2)
the images of the -necks in are contained in , where is a family of concentric infinite cylinders in for ;
-
(3)
the images of the caps in are contained in , where and are two families of concentric spheres in for .
Let . At , we focus on the neck replacement taking place in . Let denote the limiting surface of as and let , which is a cylinder by construction (Remark 3.5). Let denote a flat disc in that is perpendicular to the axis of and is equidistant from the two boundary curves of . We define a vertex in the tree and surface to be the union of and the connected component of that intersects .
The disc separates the cylinder into two components, and . For and we define a family of discs with the following properties:
-
(1)
;
-
(2)
;
-
(3)
is a family of smooth discs foliating the region between and .
Finally, for , let denote the evolution by mean curvature flow of the union of one or two connected components of that were obtained from by the neck-caps replacement. Then family
is the desired family of surfaces parametrized by a small neighborhood of vertex in the graph . For components that belong to the thick part (that is, the part that is not discarded in the MCF with surgery) we extend the family forward in time using MCF until they join up with families parametrized by edges .
We then repeat the above process for focusing on the neck-caps replacements in and so on.
Contracting discarded components. As noted in Remark 3.5, the discarded components are either a convex sphere of controlled geometry, a capped-off chain of -necks, or an -loop and have areas as .
By coarea inequality we can cover each discarded component by balls , such that is -bilipschitz diffeomorphic to a small ball in , and intersects in a finite union of small loops. We start filling these loops by minimal discs one by one in a way similar to the procedure described above. Eventually, we obtain a collection of disjoint spheres each contained in a small ball . Then by Lemma [CL20a, Lemma 4.1] there exists a Morse foliation contracting the sphere to a point. The argument in Lemma [CL20a, Lemma 4.1] can be slightly modified to give a tree foliation instead of a Morse foliation.
Finally, observe that the foliation is mean convex on . Moreover, we may assume that parameters of the -flow have been chosen so that and so for sufficiently small we have that the set is -small.
End of the proof. We now show how to finish the argument for Proposition 3.10 from its weaker version . Given a geometrically prime or non-orientable geometrically manifold with large component , we flow by smooth mean curvature flow for a short time and, by mean convexity, me may assume:
for some small real number . We then discard the region of bounded by and , obtaining a new geometrically prime manifold with large component . Proposition 3.10 then follows by applying its weaker version to with a choice of . ∎
Proof of Theorem 1.3.
By [Whi91] we can make an arbitrary small perturbation to make the metric on bumpy. For an arbitrarily small we will construct a foliation for the perturbed bumpy metric, so that the bounds on the area and diameter in the original metric are worse by at most .
When is homeomorphic to we apply Theorem 2.7 to decompose into a union of geometrically prime regions that have an index 1 minimal sphere as their large boundary component. From Proposition 3.10 we obtain a tree-foliation of each geometrically prime region by a family of 2-spheres. The areas of these spheres are at most by Theorem 2.1. We can assemble these foliations together to obtain a map . Note that must be a tree. Fix a map , such that the restriction of to any edge is linear and non-singular. The map can then be perturbed to a Morse function from to with desired properties. The details of this perturbation are postponed until the proof of Theorem 1.1, where it is done in a more general setting.
If is homeomorphic to we consider manifold obtained by cutting along a minimal sphere that minimizes area in the isotopy class of . Applying Proposition 3.10 as above we obtain a map onto a tree with vertices , of corresponding to two stable boundary spheres of . Let be a map with and such that the restriction of to each edge is non-singular. A perturbation of then gives the desired Morse function on .
Finally, case (c) follows by Proposition 3.10. ∎
Proof of Theorem 1.2.
Let be the map from to a graph from part (c) of Theorem 1.3. Recall that graph has vertices of degree at most .
Consider a general position smooth immersion of in . In particular, vertices are disjoint and every edge of in intersects at most finitely many other edges. Moreover, let denote the set of -neighborhoods of edges of , then for sufficiently small we may assume that each point is contained in at most two distinct , if lies at a distance from the vertices of . If for some vertex of , then it may lie in at most three sets corresponding to edges adjacent to the vertex .
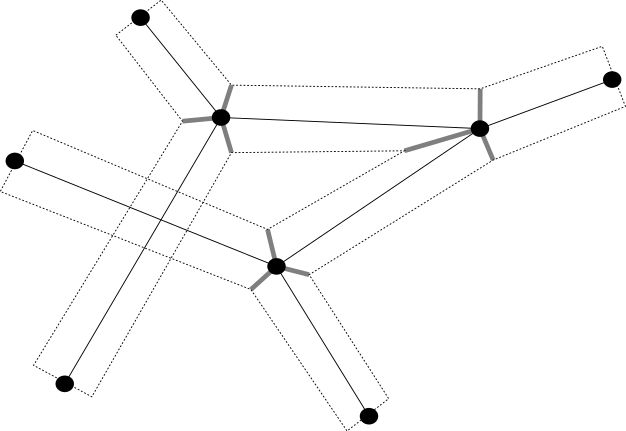
First we define map in the neighborhood of a degree vertex of . Let denote a “tripod”, a union of three arcs emanating from vertex to the boundary of -neighborhood of , each bisecting the angle between two edges of (see Fig. 1). Recall from the proof of Theorem 3.10 that is a union of a surface and a disc intersecting in a closed curve that separates , . For each there exists a Morse function with and satisfying
for ([GAL17]). (Recall from the proof of Theorem 3.10 that the length of curve can be assumed to be arbitrarily small). Hence, we can define map from to the tripod with the desired length bounds.
In an analogous way we define near all other vertices. It remains to define an interpolation that will take values in the neighborhood of each edge. Existence of such an interpolation, with controlled length of pre-images, follows by Proposition 4.3 and Theorem 4.2 from [LZ16].
We now discuss the value of constant . Surfaces have areas bounded by and genus . If we plug that into the estimate from Theorem 4.2 in [LZ16] for parametric sweepouts, keeping in mind that graph can have double points in , we obtain that the length is bounded by . A better estimate can be obtained if we cut genus 2 surface along short curves and then apply a better bound for the lengths of curves in a sweepout of a surface that is diffeomorphic to a sphere with holes from [Lio14].
We briefly describe how to cut a genus 2 surface . First we find a non-contractible curve of length at most ([KS06]). Cutting along we obtain either one or two genus 1 surfaces and glue in two spherical caps along each of area . We then subdivide the resulting surface (or surfaces) using systolic inequality for the torus and slide the subdividing curve (or curves) into the interior of the original surface without affecting its length. In the end we obtain one or two surfaces with boundary diffeomorphic to a sphere with holes. Using the bounds from [Lio14] we obtain that there exists a sweepout of with curves of length . By Proposition 4.3 [LZ16] we can construct a family of sweepouts for the 1-parameter family of surfaces corresponding to an edge of with lengths . Hence, we can take . ∎
4. Diameter bounds and the proof of Theorem 1.1
4.1. Diameter bounds for level sets of the distance function.
The proof of Theorem 4.3 will be done in several steps. The starting point is to note that by Theorem 2.1 and Corollary 2.4, all the boundary components of a geometrically prime manifold have diameter at most , and area at most . The next step then is to prove that a connected surface trapped between two equidistant surfaces of comparable radii, for , has bounded diameter. This follows by a modification of an argument in Gromov-Lawson [GL83, Corollary 10.11].
Lemma 4.1.
Let be a geometrically prime or a non-orientable geometrically region with large boundary component of diameter . Let and suppose is a connected subset of with . Then,
Proof.
Assume that . Note that otherwise we have . We will show that the conclusions of the lemma hold under this assumption for every small and hence the lemma follows.
Let be two points in . Consider and the points in closest to and , respectively, and let and denote the corresponding minimizing geodesics. Let denote a curve in connecting and and denote a curve in connecting and .
Since is geometrically prime we have that every closed surface in is homologous to a cycle in the boundary of . Thus, by Poincare-Lefschetz duality if a closed curve lies in the interior of , then it represents a trivial element of . Moreover, since all boundary components of except for are spheres we can choose a filling of with .
Let and minimize in the class of surfaces filling in . We obtain a stable minimal surface with and .
Choose and let . Consider surface . Without any loss of generality we may assume that the intersection is transverse. Since the distance from is a monotonically increasing function along and we have that there is a unique connected arc of connecting to . Let denote the point on that lies at an equal distance from and .
By Theorem 2.3 we have . Since the distances from to and are larger than that, it follows that lies at a distance at most from both and . Let and denote the closest points to on and respectively. Since is a minimizing geodesic we have
It follows that . Hence, and we have the same inequality for and . We conclude that
Since we can choose to be arbitrarily small this concludes the proof. ∎
4.2. Local tree foliation
We need to modify the mean curvature flow construction from Theorem 3.10 so that we have a diameter bound in addition to area and genus bounds. We do this by cutting surfaces from the tree foliation into smaller pieces and gluing in stable minimal discs.
Lemma 4.2.
Let be a mean convex region, be a connected strictly mean convex surface. Let be a stable minimal disc with . For all sufficiently small there exists a closed set , homeomorphic to the closure of the -neighbourhood , tree and a mean convex tree foliation with the following area bounds:
-
(1)
if is separating in , then for all and for a terminal vertex , where , , denotes connected components of ;
-
(2)
if is non-separating in , then for all .
Proof.
Let correspond to the root vertex of tree . To define a tree foliation we start by flowing surface by mean curvature flow for some very short time . For sufficiently small we have that is a smooth closed curve. Let be the minimal disc bounded by and we let be the surface corresponding to a degree vertex of the parametrization tree. Consider a piecewise smooth immersed surface obtained from by cutting it along and gluing in two copies of . If was separating in , then is the union of two piecewise smooth connected immersed surfaces, otherwise it is one connected immersed surface.
Applying mean curvature flow to will give us a monotone deformation that immediately makes the surface smooth and mean convex (see [EH91, Theorem 4.2]). If the flow is applied for sufficiently short time we have that that the surfaces are contained in a small tubular neighbourhood of . The area bound follows by the properties of mean curvature flow. ∎
4.3. Existence of tree foliation with controlled area, genus and diameter.
Theorem 4.3.
Let be a geometrically prime or non-orientable geometrically prime 3-manifold of positive scalar curvature . Suppose the large connected component of is a minimal surface of Morse index and genus . Then, there exists a tree foliation such that for any :
-
(a)
has genus at most ;
-
(b)
if is geometrically prime and if is non-orientable geometrically prime;
-
(c)
.
Proof.
1. Orientable case. Assume is geometrically prime. Suppose is a surface of genus , . If , then we start by cutting by minimal discs to reduce its genus to .
By Proposition 2.8 we can find a free boundary stable minimal disc with . Applying Lemma 4.2 we can define a tree foliation of a small neighbourhood of , so that is a surface of genus . Performing this procedure at most two times we obtain a mean convex sphere .
Observe that by the area bounds for free boundary stable minimal discs Theorem 2.2 and Lemma 4.2 we have
To bound the diameter, suppose . It is easy to see that by Theorem 2.3 and Corollary 2.4
Applying this twice we obtain that for that can be taken to be arbitrarily small for sufficiently small we have
(Recall that is the extrinsic diameter.)
Let denote the subset of bounded by mean convex sphere and the union of stable minimal spheres.
Given a subset let
Pick a minimal covering of by balls of radius . Let be a geometrically prime 3-manifold contained in with mean convex sphere as the large boundary component and satisfying
-
(1)
;
-
(2)
.
We will prove that every as above admits a tree foliation, satisfying bounds (a), (b), (c). The proof is by induction on the number of balls in necessary to cover . Observe that if is contained in one ball of the covering, then we can apply Proposition 3.10 to obtain the desired tree foliation of .
For a fixed assume that the tree foliation exists for all as above that can be covered by at most balls from . Fix that has a minimal covering by balls from .
Apply Proposition 3.10 to to obtain a tree foliation , with the corresponding maps and with fibers of controlled area. Observe that is continuous on the interior of every edge of . Also, given a vertex of , an adjacent edge directed towards and adjacent edge directed away from we have
for an that can be chosen to be small. This follows since each vertex in the construction of from the proof of Proposition 3.10 corresponds to gluing a very small disc in a cylindrical region. If denotes the radius of the disc, then the surface obtained by performing a surgery along the disc will have points that are at most distance further away from .
If , then we can apply Lemma 4.1 with to obtain
| (1) |
Thus, without any loss of generality we may assume that for some . For some to be picked later, let denote the connected component of that contains the root vertex of . We choose so that vertices of do not lie in the boundary of . By construction, we have that is a disjoint union of geometrically prime 3-manifolds with corresponding large boundary components . By Lemma 4.1 the diameters of for satisfy bound (1).
Hence, it is enough to prove existence of tree foliations of , for , with the desired bound on genus, area and diameter.
Fix . By construction we have that . Let and define , where is chosen so that is a finite collection of closed curves. Let denote the disjoint union of area minimazing discs stable minimal discs with . By Lemma 4.2 a mean convex tree foliation of a small neighbourood of with .
By Lemma 2.3 for every we have that . Hence, by Lemmas 4.2 and 4.1 it follows that each connected component satisfies
Let denote the geometrically prime 3-manifold with large boundary component . We claim that the number of balls from necessary to cover must be smaller than . Indeed, by construction there exists a point with . In particular, we can remove a ball containing from the covering of . Hence, we can apply the inductive assumption to to obtain a mean convex tree foliation with the desired diameter bounds. The worst case for the area bound is for surfaces in the foliaiton that correspond to degree 3 vertices with area bounded by .
2. Non-orientable case. Now suppose is non-orientable geometrically prime. Our argument is similar to the orientable case. We deform the two-sided index 1 projective plane , pushing it to the inside using the first eigenfunction of the Jacobi operator to obtain a mean convex surface . We pick a minimal covering of by balls of radius and prove existence of the desired tree foliation for all non-orientable geometrically prime subset with two-sided mean convex projective plane as the large boundary component satisfying
-
(1)
;
-
(2)
.
The proof proceeds by induction on the minimal number of balls in necessary to cover . For a fixed integer assume that the tree foliation exists for all that can be covered by at most balls. Fix that has a minimal covering by balls in . As in the orientable case we can define a tree foliation of with the desired control on the area, but possibly not on the diameter. Exactly as in the orientable case we can reduce the problem to constructing a foliation with diameter and area bounds of 3-manifolds with corresponding large boundary components with and . Moreover, it follows from the construction that exactly one of these manifolds (say, ) is non-orientable geometrically prime with and all other are geometrically prime with . To define the tree foliation of , , we proceed as in the orientable case. For define a collection of simple closed curves , , where and . Since is separating in every connected component of bounds a disc on one side (and Mobius band on the other side) inside . Let denote a stable minimal disc in obtained by minimizing area in the isotopy class of inside with fixed boundary . Discs obtained this way will all be disjoint. We apply Lemma 4.2 to define a local tree foliation correponding to successively cutting by discs .
In the end we obtain a collection of 2-spheres bounding geometrically prime regions and a projective plane bounding a non-orientable geometrically prime region . By construction we have that and can be covered by at most balls from collection . By inductive assumption we obtain the desired foliation of . For a sphere bounding a geometrically prime region we observe that . We then apply the argument for the orientable case to define the tree foliation for each . The worst area bound will be for the case of a degree vertex corresponding to a sphere of area and a minimizing disc with area at most half of that. Hence, we obtain bounds ∎
Proof of Theorems 1.1.
By [Whi91] we may assume that the metric on is bumpy. By Theorem 2.7 there exists a collection of minimal surfaces , so that is a union of geometrically prime or non-orientable geometrically prime manifolds . For each , the large boundary component of is an index minimal surface of genus at most . We have that is bounded by the maximal Heegaard genus of prime manifolds in the prime decomposition of , so as explained the proof of Theorem 2.7 we have . By Theorem 2.1, for orientable components and for non-orientable components. Hence, there exists a tree foliation of with bounds on area, diameter and genus as in Theorem 4.3. Let denote the corresponding maps.
Define graph , where we identify vertices if . Define map by setting on the interiors of and extend the map to . We have that and have the following properties:
-
(1)
has genus at most ;
-
(2)
;
-
(3)
.
-
(4)
For each edge the family gives a smooth foliation of .
-
(5)
has vertices of degree 1, 2, or 3, moreover
-
•
at each vertex of degree or , satisfies the description from Definition 3.7;
-
•
at vertices of degree 1, is either a point or minimal stable . In the first case surfaces , , are spheres shrinking to a point; in the second case, is a two-sheeted smooth convergence.
-
•
To prove Theorem 1.1 we choose a smooth function in general position. It follows from our construction that we may assume that has no critical points in the interiors of the edges of . Also, we may assume that local exrema of are vertices of degree or . Choose a collection of small balls in , each centered at a vertex of . By general position we may assume that and are disjoint for .
On we define function . Clearly, connected components of for will satisfy the desired bounds on the area, diameter and genus.
For a ball around a vertex of degree we have that , , is a parametrization of smooth two-sheeted convergence of spheres to a minimal . By creating a small neck and then opening it we obtain a Morse foliation of .
For a ball around a vertex of degree or we proceed as follows. Let denote the boundary point of that lies on an edge directed towards and denote the set of one or two points that lie on the edge (or edges) directed away from . We define a Morse foliation of the region between and using [CL20a, Lemma 4.2]. Recall that is a union of two connected smooth surfaces and , diffeomorphic to a disc, with . is diffeomorphic to a surface obtained from by removing the tubular neighborhood of and gluing in two copies of . We can fix a Morse function with and a point in , such that has exactly one critical point of index (at ). Using Morse function in the construction of foliation from [CL20a, Lemma 4.2] we obtain that the genus of surfaces in the foliation is bounded by and the area is at most . The largest upper bounds for area will correspond to degree vertices that we constructed in the proof Theorem 4.3 with for orientable 3-manifolds and for non-orientable 3-manifolds.
This defines the desired Morse function . ∎
References
- [Amb15] Lucas C. Ambrozio, Rigidity of area-minimizing free boundary surfaces in mean convex three-manifolds, J. Geom. Anal. 25 (2015), no. 2, 1001–1017. MR 3319958
- [And12] Ben Andrews, Noncollapsing in mean-convex mean curvature flow, Geom. Topol. 16 (2012), no. 3, 1413–1418. MR 2967056
- [BCZ91] M. Boileau, D. J. Collins, and H. Zieschang, Genus Heegaard decompositions of small Seifert manifolds, Ann. Inst. Fourier (Grenoble) 41 (1991), no. 4, 1005–1024. MR 1150575
- [BH18] Simon Brendle and Gerhard Huisken, Mean curvature flow with surgery of mean convex surfaces in three-manifolds, J. Eur. Math. Soc. (JEMS) 20 (2018), no. 9, 2239–2257. MR 3836846
- [BHH] Reto Buzano, Robert Haslhofer, and Or Hershkovits, The moduli space of two-convex embedded spheres, J. Differential Geom.
- [BHH19] Reto Buzano, Robert Haslhofer, and Or Hershkovits, The moduli space of two-convex embedded tori, Int. Math. Res. Not. IMRN (2019), no. 2, 392–406. MR 3903562
- [CGG91] Yun Gang Chen, Yoshikazu Giga, and Shun’ichi Goto, Uniqueness and existence of viscosity solutions of generalized mean curvature flow equations, J. Differential Geom. 33 (1991), no. 3, 749–786. MR 1100211
- [CL20a] Gregory R Chambers and Yevgeny Liokumovich, Existence of minimal hypersurfaces in complete manifolds of finite volume, Inventiones mathematicae 219 (2020), no. 1, 179–217.
- [CL20b] Otis Chodosh and Chao Li, Generalized soap bubbles and the topology of manifolds with positive scalar curvature, https://arxiv.org/abs/2008.11888 (2020).
- [EH91] Klaus Ecker and Gerhard Huisken, Interior estimates for hypersurfaces moving by mean curvature, Invent. Math. 105 (1991), no. 3, 547–569. MR 1117150
- [Eps61] D. B. A. Epstein, Projective planes in 3-manifolds†, Proceedings of the London Mathematical Society s3-11 (1961), no. 1, 469–484.
- [ES91] L. C. Evans and J. Spruck, Motion of level sets by mean curvature. I, J. Differential Geom. 33 (1991), no. 3, 635–681. MR 1100206
- [GAL17] Parker Glynn-Adey and Yevgeny Liokumovich, Width, ricci curvature, and minimal hypersurfaces, J. Differential Geom. 105 (2017), no. 1, 33–54.
- [GL83] Mikhael Gromov and H. Blaine Lawson, Jr., Positive scalar curvature and the Dirac operator on complete Riemannian manifolds, Inst. Hautes Études Sci. Publ. Math. (1983), no. 58, 83–196 (1984). MR 720933
- [Gro18] Misha Gromov, A dozen problems, questions and conjectures about positive scalar curvature, pp. 135–158, Springer International Publishing, Cham, 2018.
- [Gro20a] Misha Gromov, Four lectures on scalar curvature, https://arxiv.org/abs/1908.10612 (2020).
- [Gro20b] by same author, No metrics with positive scalar curvatures on aspherical 5-manifolds, https://arxiv.org/abs/2009.05332 (2020).
- [HK17] Robert Haslhofer and Bruce Kleiner, Mean curvature flow with surgery, Duke Math. J. 166 (2017), no. 9, 1591–1626. MR 3662439
- [HK19] Robert Haslhofer and Daniel Ketover, Minimal 2-spheres in 3-spheres, Duke Math. J. 168 (2019), no. 10, 1929–1975. MR 3983295
- [Ilm92] Tom Ilmanen, Generalized flow of sets by mean curvature on a manifold, Indiana University Mathematics Journal 41 (1992), no. 3, 671–705.
- [Ilm94] Tom Ilmanen, Elliptic regularization and partial regularity for motion by mean curvature, Mem. Amer. Math. Soc. 108 (1994), no. 520, x+90. MR 1196160
- [KLS19] Daniel Ketover, Yevgeny Liokumovich, and Antoine Song, On the existence of minimal heegaard surfaces.
- [KS06] Mikhail G. Katz and Stéphane Sabourau, Hyperelliptic surfaces are loewner, Proceedings of the American Mathematical Society 134 (2006), no. 4, 1189–1195.
- [Lau13] Joseph Lauer, Convergence of mean curvature flows with surgery, Comm. Anal. Geom. 21 (2013), no. 2, 355–363. MR 3043750
- [Lio14] Yevgeny Liokumovich, Slicing a 2-sphere, Journal of Topology and Analysis 06 (2014), no. 04, 573–590.
- [LY82] Peter Li and Shing Tung Yau, A new conformal invariant and its applications to the Willmore conjecture and the first eigenvalue of compact surfaces, Invent. Math. 69 (1982), no. 2, 269–291. MR 674407
- [LZ16] Yevgeny Liokumovich and Xin Zhou, Sweeping Out 3-Manifold of Positive Ricci Curvature by Short 1-Cycles Via Estimates of Min-Max Surfaces, International Mathematics Research Notices 2018 (2016), no. 4, 1129–1152.
- [MN12] Fernando C. Marques and André Neves, Rigidity of min-max minimal spheres in three-manifolds, Duke Math. J. 161 (2012), no. 14, 2725–2752. MR 2993139
- [Mon15] Rafael Montezuma, Metrics of positive scalar curvature and unbounded widths, Calculus of Variations and Partial Differential Equations 55 (2015).
- [Mor88] Yoav Moriah, Heegaard splittings of Seifert fibered spaces, Invent. Math. 91 (1988), no. 3, 465–481. MR 928492
- [MSY82] William Meeks, III, Leon Simon, and Shing Tung Yau, Embedded minimal surfaces, exotic spheres, and manifolds with positive Ricci curvature, Ann. of Math. (2) 116 (1982), no. 3, 621–659. MR 678484 (84f:53053)
- [MY80] William H. Meeks, III and Shing Tung Yau, Topology of three-dimensional manifolds and the embedding problems in minimal surface theory, Ann. of Math. (2) 112 (1980), no. 3, 441–484. MR 595203
- [MY82] William W. Meeks, III and Shing Tung Yau, The existence of embedded minimal surfaces and the problem of uniqueness, Math. Z. 179 (1982), no. 2, 151–168. MR 645492
- [NR04] A. Nabutovsky and R. Rotman, Volume, diameter and the minimal mass of a stationary 1-cycle, Geom. Funct. Anal. 14 (2004), no. 4, 748–790. MR 2084979
- [Pit76] Jon T. Pitts, Existence and regularity of minimal surfaces on Riemannian manifolds, Bull. Amer. Math. Soc. 82 (1976), no. 3, 503–504.
- [PS19] Panos Papasoglu and Eric Swenson, A surface with discontinuous isoperimetric profile and expander manifolds, Geometriae Dedicata (2019).
- [SY83] Richard Schoen and S. T. Yau, The existence of a black hole due to condensation of matter, Comm. Math. Phys. 90 (1983), no. 4, 575–579.
- [Whi91] Brian White, The space of minimal submanifolds for varying Riemannian metrics, Indiana Univ. Math. J. 40 (1991), no. 1, 161–200. MR 1101226 (92i:58028)
- [Whi00] by same author, The size of the singular set in mean curvature flow of mean-convex sets, J. Amer. Math. Soc. 13 (2000), no. 3, 665–695. MR 1758759
- [Whi17] by same author, On the bumpy metrics theorem for minimal submanifolds, Amer. J. Math. 139 (2017), no. 4, 1149–1155. MR 3689325
- [Yau87] Shing-Tung Yau, Nonlinear analysis in geometry, Enseign. Math. (2) 33 (1987), no. 1-2, 109–158. MR 896385