Variational setting for cracked beams and shallow arches
Abstract.
We develop a rigorous mathematical framework for the weak formulation of cracked beams and shallow arches problems. First, we discuss the crack modeling by means of massless rotational springs. Then we introduce Hilbert spaces, which are sufficiently wide to accommodate such representations. Our main result is the introduction of a specially designed linear operator that ”absorbs” the boundary conditions at the cracks.
We also provide mathematical justification and derivation of the Modified Shifrin’s method for an efficient computation of the eigenvalues and the eigenfunctions for cracked beams.
Key words and phrases:
Shallow arch, beam, cracks, eigenvalues and eigenfunctions2010 Mathematics Subject Classification:
47J35, 35Q74, 35D30, 70G751. Introduction
Detection of cracks is an important engineering problem. It requires a rigorous mathematical framework for modeling the motion of cracked beams and shallow arches. The main goal of this paper is to develop a variational setting for such a framework. We also present an elegant and efficient method (a modification of the Shifrin’s method) for the computation of the eigenvalues and the eigenfunctions for the cracked elements.
For a theory of cracked Bernoulli-Euler beams see [5]. A significant effort has been directed at the vibration analysis of cracked beams. Representation of a crack by a rotational spring has been proven to be accurate, and it is often used, see [2, 3] and the extensive bibliography there. Determination of the beam natural frequencies is discussed in [11, 13, 14]. S. Caddemi and his colleagues have further developed the theory using energy functions in [3]. However, no full variational setting has been presented so far, making it difficult to study evolution problems. As we have already mentioned, our work closes a gap in this development.
The theory of uniform beams and shallow arches is well developed. An early exposition can be found in [1]. More general models in the multidimensional setting, and a literature survey are presented in [6]. A review for vibrating beams is given in [10]. Motion of uniform arches and a related parameter estimation problem are studied in [8]. These results are extended to point loads in [7]. The existence of a compact, uniform attractor is established in [9].
The transverse motion of a beam or an arch is described by the function , which represents the deformation of the beam/arch measured from the -axis. For definiteness, the boundary conditions are of the hinged type
| (1.1) |
Other types of boundary conditions, can be treated similarly.
Crack modeling is considered in Section 2. Suppose that there are cracks located at . A crack at is represented by a rotational spring with the flexibility , . This is expressed as
| (1.2) |
In Section 3 we introduce special Hilbert spaces and satisfying
| (1.3) |
with continuous and dense embeddings. These spaces are broad enough to contain continuous functions with discontinuous derivatives at the joint points.
Then we show that the solution of the equation in satisfies the joint conditions, including (1.2). Thus the operator ”absorbs” the boundary conditions, as expected of the weak formulation of the steady state problem.
This result allows us to prove the existence of the eigenvalues and the eigenfunctions of . An efficient Modified Shifrin’s Method for their computation is presented in Section 5.
The results in this paper form the basis for a comprehensive study of dynamic behavior of cracked beams and arches. It will be presented elsewhere.
2. Crack modeling
A crack is a disruption in the material, that has a negligible extent in the direction of the beam/arch axis, but of a non-negligible depth. It is fully described by its position along the axis, and the crack depth ratio , as shown in Figure 1.
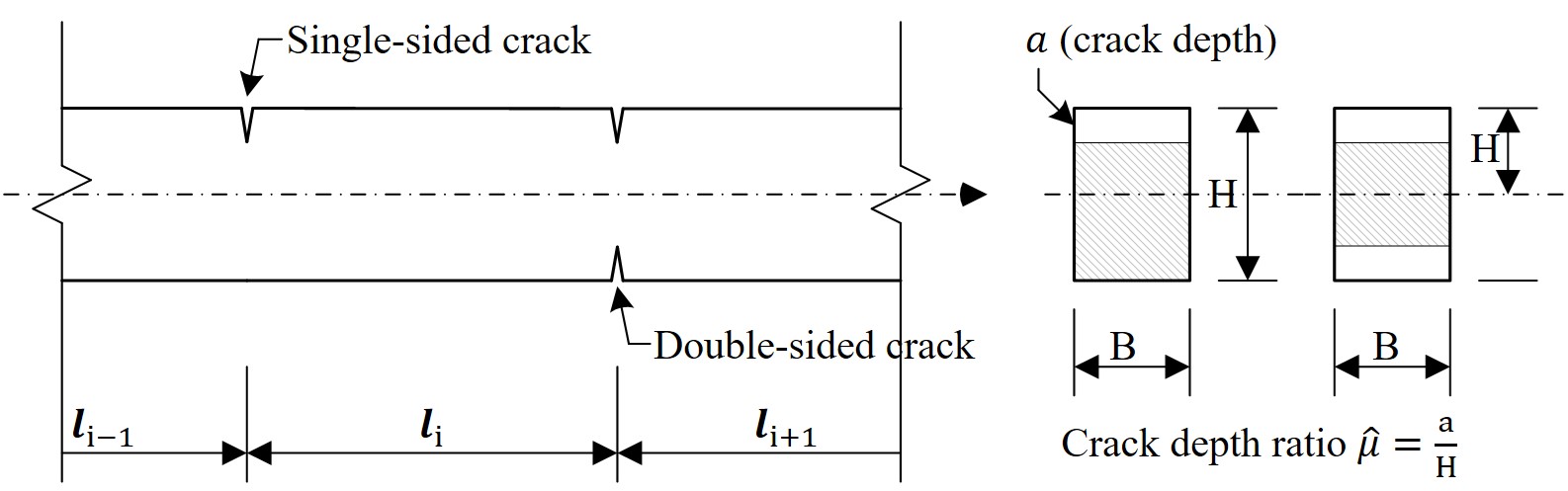
According to [4], a crack is modeled by a massless rotational spring. The spring flexibility depends on the crack depth ratio , and on whether the crack is one-sided or two-sided, open or closed, and so on. The flexibility is equal to if there is no crack, and it increases with the crack depth. Explicit expressions for the functions are provided in Section 5.
Remark 2.1.
The following discussion is applicable to both arches and beams, but to avoid repetitions we will refer just to arches.
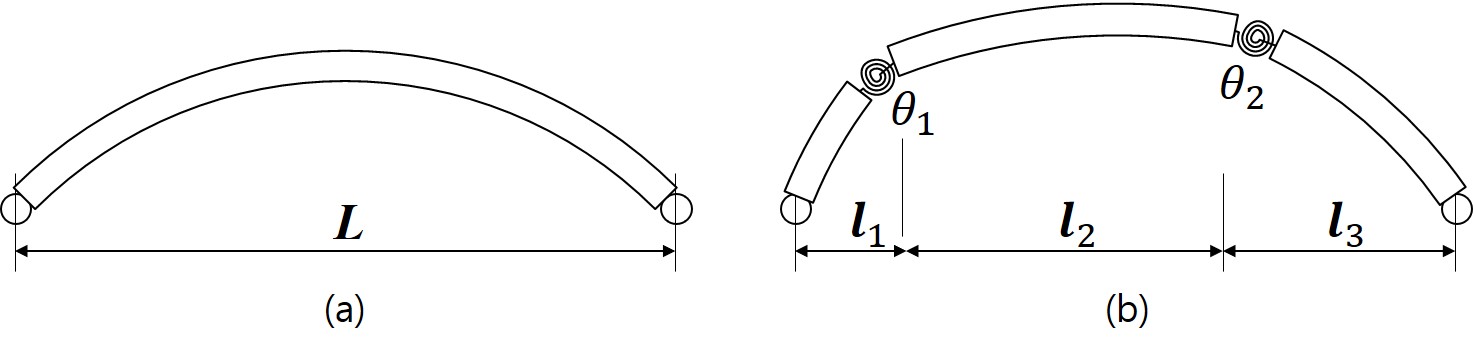
Suppose that there are cracks along the length of the arch, located at . For convenience, we denote , and . Consequently, the cracked arch is modeled as a collection of uniform arches over the intervals , as shown in Figure 2(b).
We consider only the transverse motion of the arch, so its position can be described by the function , , . The boundary conditions at the cracks enforce the continuity of the displacement field , the bending moment , and the shear force . Condition expresses the discontinuity of the arch slope at the -th crack, where , see Figure 2(b).
To simplify the statement of the boundary conditions at the cracks, we introduce the notion of the jump of a function at any , as follows
| (2.1) |
With this notation the conditions at the cracks (joint conditions) are
| (2.2) |
and
| (2.3) |
where , and . Note that by (2.2).
3. Hilbert spaces
We introduce Hilbert spaces and suitable for working with cracked elements. Suppose that an arch has cracks at the joint points . This partition of the interval is associated with subintervals .
Let be the Hilbert space
| (3.1) |
Let the inner product and the norm in be denoted by and correspondingly. The inner product and the norm in are defined by
| (3.2) |
Consider the Sobolev space on a bounded interval , and let . Then are continuous functions on , up to a set of measure zero, and . Therefore, for such , we will always assume that .
Define the linear space
| (3.3) |
We interpret as a continuous function on , such that , with , i.e. . Furthermore, , and for .
Define the inner product on by
| (3.4) |
where .
It is clear that is a symmetric, bilinear form on . To see that implies , notice that any function with is piecewise linear and continuous on . Furthermore, for any . Therefore is continuous on . In fact, it is a constant there, since a.e. on . Thus is a linear function on satisfying the zero boundary conditions at the ends of the interval. Therefore on , and is a well-defined inner product on . The corresponding norm in is
| (3.5) |
where is the norm in . We will show in Lemma 3.2 that is a Hilbert space.
Let . We define the derivatives of component-wise in the spaces , that is , and so on, for , . For definiteness, we will assume that the derivative is continuous from the right on .
Some useful properties of functions in are established in the following lemma.
Lemma 3.1.
Let denote various constants independent of . Then
-
(i)
The second derivative is bounded in , and
(3.6) -
(ii)
The derivative is bounded on ,
(3.7) Moreover,
(3.8) -
(iii)
Function is Lipschitz continuous, with the Lipschitz constant . Also, is bounded on ,
(3.9) and
(3.10)
Proof.
We only show (ii). Let . Then its derivative is continuous on any interval , . By the Mean Value Theorem for Integrals, there exists , such that
Thus . Also, for any ,
Therefore for any , giving (3.7). This inequality implies .
We have
| (3.11) | ||||
Therefore
| (3.12) |
Lemma 3.2.
Let ,
and
Then
-
(i)
The norms and are equivalent on .
-
(ii)
is a Hilbert space, and is its closed subspace of
co-dimension . -
(iii)
is a Hilbert space.
Proof.
(i) This follows from Lemma 3.1, and the observation that .
(ii) Let . Then is a Hilbert space with the norm . By the Trace Theorem [12, Theorem 3.2], functionals and , are continuous linear functional on . Therefore is a closed subspace of of co-dimension in .
Similarly, the functionals , , , are linear and continuous on . By the definition (3.3) of , we conclude that is a closed subspace of of co-dimension .
It remains to show that on the norm is equivalent to the norm , defined in (3.5), but this was established in (i).
(iii) Since the space is complete, then so is its closed subspace . ∎
Lemma 3.3.
The identity embedding is linear, continuous, with a dense range in . Furthermore, it is compact.
Proof.
The embedding is linear. By (3.10), for . Thus the embedding is continuous.
Let be the unit ball of . By Lemma 3.1, functions are equicontinuous and equibounded on . Hence they form a precompact set in , and in . Similarly, functions are precompact in , for any , hence they are precompact in . The compactness of the embedding follows.
For the density of the embedding, note that , and is dense in . Therefore is dense in . ∎
Lemma 3.3 allows us to define the Gelfand triple , with the dense embeddings. Furthermore, the embedding is compact. The pairing between and extending the inner product in . This means that given , and , we have .
4. Variational setting and operator
We introduce the operator that ”absorbs” the junction boundary conditions. This operator is central to the variational setting of problems for cracked beams and arches. The existence of its eigenvalues and the eigenfunctions is established as well.
Definition 4.1.
Define the operator on by
| (4.1) |
for any . We will also write for , if it does not cause a confusion.
See Section 2 for the setup for the junction (crack) points , and the flexibilities . Recall, that a linear operator is called coercive, if there exists , such that for any .
Lemma 4.2.
Let be defined by (4.1). Then is a symmetric, continuous, linear, and coercive operator from onto .
Proof.
Clearly, is a symmetric linear operator. Since all , we conclude that there exists a constant , such that . Therefore is defined on all of , and it is bounded.
As was mentioned in Section 2, functions modeling an arch with cracks are expected to satisfy certain boundary conditions. For convenience, we restate them here:
| (4.2) |
and
| (4.3) |
for .
The next theorem is the main result of this paper.
Theorem 4.3.
Proof.
By Lemma 4.2, the operator is coercive, and its range is . Since , condition implies that . Therefore equation in has a solution , which is unique since is coercive.
To investigate the properties of functions in , recall that . Notice that , where it is assumed that the functions from are extended by zero outside of . Thus , for and any , .
Let , so for some . By the definition of , we have . For any , by the definition of , we have
Integration by parts gives
Therefore in the sense of the weak derivatives on . Thus , and a.e. on . Repeating this argument for other intervals , we conclude that , and a.e. on , .
It remains to show the satisfaction of the conditions (4.2)–(4.3). So, let . Since we have already established that , , we can do the Integration by Parts on every interval , to obtain that for any
Since , we have , and is continuous on . Therefore the above equality can be rewritten as
| (4.4) | ||||
The first sum is zero, since a.e. on , . Next, choose a continuously differentiable , which is not zero only in a small neighborhood of , and . Conclude that . Similarly, .
Choose a continuously differentiable , such that , and for all , but , . Conclude that . Repeat this procedure for other points , one at a time. Thus , . We are left with
| (4.5) |
Choose a continuously differentiable , which is not zero only in a small neighborhood of , and such that . This implies . Therefore . Repeat for other points . Thus for . Now we can rewrite (4.5) as
Choose a continuous, piecewise linear , such that , is linear on , and on . Note that for , and . Conclude that . Repeat for other points , . Thus satisfies all the conditions (4.2)–(4.3). ∎
Remark. The fact that a.e. on in Theorem 4.3 does not imply that . This is similar to the fact that the strong derivative of a step function on is zero a.e. on . However, .
Finally in this section we discuss the eigenvalues and the eigenfunctions of the operator . It was shown in Lemma 4.2 that is a continuous, linear, symmetric, and coercive operator from onto . Following [15, Section 2.2.1], can also be considered as an unbounded operator in . By Lemma 3.3, the embedding is compact. Therefore the standard spectral theory for Sturm-Liouville boundary value problems is applicable. The eigenfunctions belong to . Therefore, by Theorem 4.3, they are in the domain , thus continuous on , and satisfy conditions (4.2)–(4.3).
We summarize these results in the following lemma.
Lemma 4.4.
Let be the operator defined in (4.1). Then
-
(i)
There exists an increasing sequence of its real positive eigenvalues
, with . - (ii)
-
(iii)
The eigenfunctions satisfy in , . That is, a.e. on every interval , .
-
(iv)
The set is a complete orthonormal basis in .
Algorithms for a computational determination of the eigenvalues and the eigenfunctions of are discussed in Section 5.
Remark. If the arch is uniform, i.e. it has no cracks, then the results presented in this section are simplified. Specifically, the spaces , and the operator take the following forms
| (4.6) |
for any . See [8] for an investigation of this case.
5. Eigenvalues and eigenfunctions
In this section we present the Modified Shifrin’s method for the computation of the eigenfunctions and the corresponding eigenvalues , of the operator . The existence of the eigenvalues and the eigenfunctions has been established in Lemma 4.4.
Transition matrices method. This is a common method for the determination of the eigenfunctions and the eigenvalues, so we just briefly mention it for completeness, see [11] for details.
The general solution of the equation on , for is
| (5.1) | ||||
Let vector be composed of the coefficients of the expansion in (5.1), on interval .
Suppose that vector is known. Then it defines function on , and the boundary conditions for at . The junction conditions (4.2)–(4.3) define the boundary conditions for at . Then the initial value problem on , uniquely defines the expansion coefficients on . It is readily seen that the transformation from to is linear, and it is given by a matrix , i.e. .
Extending this process to all the subintervals , we get
| (5.2) |
Note that all the matrices are -dependent in a non-linear way.
To satisfy the hinged boundary conditions at , we require .
Let the matrix transform the solution determined by the vector into the boundary conditions for and at .
To satisfy the hinged boundary conditions at , we have to solve the matrix equation
| (5.3) |
This matrix equation has a non-trivial solution, if the corresponding -dependent determinant is equal to zero. This amounts to finding an eigenvalue of the problem. Numerically, the highly nonlinear equation is solved by a Newton type method. The computations can be quite expensive, so the applicability of this method is usually restricted to a small number of cracks, see [11].
Modified Shifrin’s method. The original method is described in [14]. We modify it by placing it within the framework of this paper. Also, notice that in our study we have proved the existence of the eigenvalues and the eigenfunctions for the operator , which provides the theoretical justification for the method.
Let be the linear space of continuous piecewise linear functions on , which are linear on every interval , . Note that is an -dimensional space.
The goal of the next result is to show that any function can be uniquely represented as , where is smooth, and . Thus absorbs all the jumps of the derivative on .
Lemma 5.1.
Let . Then there exists a unique decomposition
| (5.4) |
where , and .
Proof.
Let be defined by
Then , , and . Let , . Then . Therefore . Note that , and . If is another such function, then , and .
Now we just let . Then on every interval , and . The function is unique, since is smooth, which is already shown to be unique. ∎
Let be an eigenfunction of . The index will be suppressed for notational simplicity.
By Lemma 4.4(iii),
| (5.5) |
where the equality is satisfied a.e. on every interval . By Lemma 5.1 we can represent as
| (5.6) |
where is smooth, and . Since on every , equation (5.5) becomes
| (5.7) |
Let be the basis in , defined by
| (5.8) |
Note that , for , , and is the only discontinuity point of on .
Let . Note that . Since , and is a basis in , the function can be represented as
| (5.9) |
Therefore equation (5.7) can be written as
| (5.10) |
In [14], equation (6) on p. 412 is used instead of (5.7). Note, that while our approaches are similar, the notations may be defined differently. Thus the formulas in [14] cannot be used in our framework.
Equation (5.10) for is a linear non-homogeneous, fourth order ODE on . Its general solution is the sum of the complementary solution
| (5.11) |
and a particular solution . The latter can be found using the Laplace transform. Its expression in a convolution form is
| (5.12) |
Let
| (5.13) |
Then the general solution of (5.10) can be written as
| (5.14) |
Note that all the expressions can be computed explicitly.
Recall from the junction conditions (4.3), that , and for . By construction . Thus , and we can write , . Therefore, the last expression becomes
| (5.15) |
where the derivatives are in , and .
Thus (5.15) gives linear equations for unknowns , and . Note that these equations are valid for any boundary conditions at the ends of the interval . The missing four equations are derived from the boundary conditions of the problem.
For example, for the hinged boundary conditions (1.1), we have the following four linear equations: , and . More explicitly, using (5.14), equation becomes
| (5.16) |
Similarly, becomes
| (5.17) |
Equations are
| (5.18) |
and
| (5.19) |
Writing the linear system (5.15)–(5.19) in the matrix form shows that it has non-trivial solutions only if
| (5.20) |
This non-linear equation has infinitely many solutions , corresponding to the eigenvalues .
Let the corresponding non-trivial solution of the linear system be . Then we can compute
, and
from (5.14). Finally, we get the eigenfunction . One may want to normalize in to achieve its uniqueness, up to a sign.
A comparison of the computational efficiency of the methods was conducted in [14]. The first three eigenvalues have been computed by the Transition matrices method, and by the Shifrin’s method. The Shifrin’s method is about twice as fast for the beam with one crack, and about three times as fast for the beam with two cracks.
Natural beam frequencies. For practical applications it is important to express equation (5.5) in physical variables.
Equation of harmonic transverse oscillations of a uniform beam defined on interval is
| (5.21) |
where is the Young’s modulus, and are the cross-sectional area and the area moment of inertia correspondingly, and is the natural frequency of the oscillations. For a cracked beam, equation (5.21) is satisfied on every subinterval , .
To relate this equation to the non-dimensional variables, define the -scale , and the radius of gyration by
| (5.22) |
Then make the change of variables
| (5.23) |
Then equation (5.21) becomes
Thus, in non-dimensional ratios
Comparing this equation with the definition of the eigenvalues and the eigenfunctions , we conclude that the natural beam frequencies are given by
| (5.24) |
Expressions for flexibilities . The standard approach to modeling a crack is to represent it as a massless rotational spring with the spring constant , and the flexibility .
The spring constant relates the torque to the angle of rotation. In our case this relationship takes the form , or , where
| (5.25) |
If the beam has a rectangular cross-section, as shown in Figure 1, then the area moment of inertia of the rectangle can be computed explicitly, and (5.25) can be simplified further. If the crack is double-sided, then by [13, Eq. (2.8)-(2.10)], the expression for the flexibility becomes
| (5.26) |
where is the half-height of the beam cross-section, and .
If the crack is single-sided, then by [13, Eq. (2.8)-(2.10)]
| (5.27) |
where is the entire height of the beam cross-section, and .
References
- [1] J.M. Ball, Initial-boundary value problems for an extensible beam, J. Math. Anal. Appl, 42 (1973) 61-90.
- [2] S. Caddemi and I. Calio, Exact closed-form solution for the vibration modes of the Euler–Bernoulli beam with multiple open cracks, Journal of Sound and Vibration, 327(3), 1973, 473 - 489.
- [3] S. Caddemi and A. Morassi, Multi-cracked Euler-Bernoulli beams: Mathematical modeling and exact solutions, International Journal of Solids and Structures, 50(6), 2013, 944-956.
- [4] M.N. Cerri and G.C. Ruta, Detection of localised damage in plane circular arches by frequency data, Journal of Sound and Vibration, 270(1), 2004, 39-59.
- [5] S. Christides and A.D.S. Barr, One-dimensional theory of cracked Bernoulli-Euler beams, International Journal of Mechanical Sciences, 26(11), 1984, 639-648
- [6] E. Emmrich and M. Thalhammer, A class of integro-differential equations incorporating nonlinear and nonlocal damping with applications in nonlinear elastodynamics: Existence via time discretization, Nonlinearity, 24(9), 2011, 2523-2546.
- [7] S. Gutman and J. Ha, Shallow arches with weak and strong damping, Journal of the Korean Mathematical Society 54(5), 2017, 945-966.
- [8] S. Gutman and J. Ha and S. Lee, Parameter identification for weakly damped shallow arches, Journal of Mathematical Analysis and Applications, 403(1), 2013, 297-313.
- [9] S. Gutman and J. Ha, Uniform attractor of shallow arch motion under moving points load, Journal of Mathematical Analysis and Applications, 464(1), 2018, 557-579.
- [10] S. M. Han and H. Benaroya and T. Wei, Dynamics of transversely vibrating beams using four engineering theories, Journal of Sound and Vibration, 225(5), 1999, 935-988.
- [11] H.P. Lin and S.C. Chang and J.D. Wu, Beam vibrations with an arbitrary number of cracks, Journal of Sound and Vibration, 258(5), 2002, 987-999.
- [12] J.L. Lions and E. Magenes, Nonhomogeneous Boundary Value Problems and Applications, vol 1, 1972, Springer-Verlag, New York.
- [13] W.M. Ostachowicz and M. Krawczuk, Analysis of the effect of cracks on the natural frequencies of a cantilever beam, Journal of Sound and Vibration, 150(2), 1991, 191-201.
- [14] E.I. Shifrin and R. Ruotolo, Natural frequencies of a beam with an arbitrary number of cracks, Journal of Sound and Vibration, 222(3), 1999, 409-423.
- [15] R. Temam, Infinite-Dimensional Dynamical Systems in Mechanics and Physics, Applied Mathematical Sciences, 1997, Springer, New York.