Tracking Dynamical Features via Continuation and Persistence
Abstract
Multivector fields and combinatorial dynamical systems have recently become a subject of interest due to their potential for use in computational methods. In this paper, we develop a method to track an isolated invariant set—a salient feature of a combinatorial dynamical system—across a sequence of multivector fields. This goal is attained by placing the classical notion of the “continuation” of an isolated invariant set in the combinatorial setting. In particular, we give a “Tracking Protocol” that, when given a seed isolated invariant set, finds a canonical continuation of the seed across a sequence of multivector fields. In cases where it is not possible to continue, we show how to use zigzag persistence to track homological features associated with the isolated invariant sets. This construction permits viewing continuation as a special case of persistence.
1 Introduction
Dynamical systems enter the field of data science in two ways: either directly, as in the case of dynamic data, or indirectly, as in the case of images, where gradient dynamics are useful. Forman’s discrete Morse theory [10, 11, 16] combines topology with gradient dynamics via combinatorial vector fields. Discrete Morse theory has been used to simplify datasets and to extract topological features from them [1, 7, 15, 26]. When coupled with persistent homology [7, 8, 9], this theory can be useful for analyzing complex data [12, 17, 18].
Conley theory [4] is a generalization of classical Morse theory beyond gradient dynamics. Conley’s approach to dynamical systems is motivated by the observation that in many areas, perhaps most notably biology, the differential equations governing systems of interest are known only roughly. Generally, this is due to the presence of several parameters which cannot be measured or estimated precisely. A similar situation occurs in data science, where a time series dataset that is collected from a dynamical process only crudely approximates the underlying system. This observation has motivated recent studies [2, 6, 14, 20, 21, 23] on a variant of Conley theory for combinatorial vector fields.
The primary objects of interest in Conley theory are isolated invariant sets, each of which is a salient feature of a vector field, together with an associated homological invariant called the Conley index (see Section 2). Notably, isolated invariant sets with non-trivial Conley index persist under small perturbations. The geometry of the isolated invariant set may change, and even the topology may change, but the Conley index associated with the isolated invariant set remains the same. The isolated invariant set cannot suddenly vanish or change from an attractor to a repeller or vice versa. From this observation, we get the notion of the continuation of an isolated invariant set in a dynamical system to another one in a nearby system. This local idea becomes global by making the continuation relation transitive.
Given a path in the space of dynamical systems, one can track an invariant set along the path so long as the invariant set remains isolated. When the isolation is lost, continuation “breaks” and the Conley index is not well-defined. Typically, this may be observed when two isolated invariant sets merge. Isolation may eventually be regained, but there is no guarantee that the Conley index will be recovered. We propose to use persistence [7, 8, 9] in the discrete setting to connect continuations. First, we show how continuation can be detected and maintained algorithmically in a combinatorial multivector field, which is a discretized version of a continuous vector field. In fact, the continuation itself may be viewed as a special case of persistence where all bars persist for the duration of the continuation. When continuation “breaks,” we observe the birth and death of homology classes.
The combination of continuation and persistence allows us to algorithmically track an isolated invariant set and its associated Conley index in the setting of combinatorial dynamical systems. Recall that a combinatorial dynamical system is generated by a multivector field. A multivector field is a partition of a simplicial complex into sets that are convex with respect to the face poset. We track an isolated invariant set in a sequence of such fields where each field differs from its adjacent ones by an atomic rearrangement. Each atomic rearrangement is either an atomic coarsening or an atomic refinement. We show that an atomic refinement always permits continuation and thus the Conley index of the tracked invariant set persists. In the case of coarsening, we may not be able to continue. In such a case, we select an isolated invariant set that is a minimal perturbation of the previous one and compute the persistence of the Conley index between them. Hence, while there may come a point where we can no longer track an isolated invariant set, we can use persistence to track the lifetime of the homological features that are associated with the isolated invariant set.
 |
 |
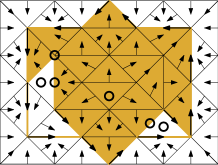
The top row of Figure 1 presents flow lines from three flows on a simplicial complex with vertices marked from A to N. The same figure also shows three combinatorial multivector fields represented as three different partitions of the collection of cells into multivectors. Each multivector is depicted as a connected component, and it is easy to see that they are convex with respect to the face poset. The multivector fields are constructed as follows: if the flow transversely crosses an edge into a triangle , then and are put in the same multivector. Else, is put into the same multivector as both of its incident triangles. If the flow line originating at a vertex immediately enters triangle , then and are put into the same multivector. See [22, 23] for additional information on this construction.
There are two saddle stationary points in each flow, indicated by small black dots. For all three flows, the lower saddle is located in triangle . However, the upper one moves from triangle in the left flow, through triangle in the middle flow and finally it shares triangle with the lower saddle in the right flow. On the combinatorial level, the upper saddle in the left flow is represented by an isolated invariant set consisting of one multivector marked in yellow. The Conley index of is non-trivial only in dimension one and has exactly one generator. Using methods from this paper, can be tracked to an isolated invariant set containing the upper saddle of the middle flow and consisting of one multivector , also marked in yellow. The isolated invariant set containing the upper saddle of the right flow consists of one multivector , again marked in yellow. It is not a continuation of , because in the right flow the two saddles are too close to one another to be distinguishable with the resolution of the triangulation. Furthermore, the Conley index has changed. It is only nontrivial in dimension one, but unlike and , it has two generators. Hence, in the right multivector field, a new generator is born. We show how to capture the birth of this generator using persistence, and we depict the associated barcode beneath the top row of Figure 1. The familiar reader will note that the Conley index of is the same as that of a monkey saddle. However, because of the finite resolution, we cannot discriminate between two nearby saddles and a monkey saddle. One can view a multivector field as a combinatorial object that represents flows up to the resolution permitted by a triangulation. This purely combinatorial view of the top row of Figure 1 is presented in the bottom row. In subsequent examples, we use this style.
2 Combinatorial Dynamical Systems
In this section, we review multivector fields, combinatorial dynamical systems, and isolated invariant sets. Throughout this paper, will always denote a finite simplicial complex. Furthermore, we will only consider simplicial homology [13, 25] with coefficients taken from a finite field. Much of the foundational work on combinatorial dynamical systems was first published in [21] and subsequently generalized in [20]. This work was heavily influenced by Forman’s discrete Morse theory [10, 11]. Combinatorial dynamical systems are constructed via multivector fields, which require a notion of convexity. Given a finite simplicial complex , we let denote the face relation on . Formally, if , then if and only if is a face of . The set is convex if for each pair where there exists a satisfying , we have that .
A multivector is a convex subset of a simplicial complex. A partition of into multivectors is a multivector field on . Multivectors are not required to have a unique maximal element under , nor are they required to be connected. Disconnected multivectors do not appear in practice, and in the interest of legibility, all examples that we include in this paper only depict connected multivectors. However, all of our theoretical results do hold for disconnected multivectors. We draw a multivector by drawing an arrow from each nonmaximal element to each maximal element where . If is the only element of a multivector, or a singleton, then we mark with a circle. Each is contained in a unique multivector . We denote the unique multivector in containing as .
A multivector field induces dynamics on . Given a simplex , we denote the closure of as . For a set , the closure of is given by . A set is closed if and only if . The multivector field induces a multivalued map where . Informally, this will mean that if one is at a simplex , then one can move either to a face of or to a simplex in the same multivector as . We allow moving within any single multivector because, on the level of flows, the behavior within the multivector is beyond the resolution of the given simplicial complex. Conversely, we do not allow moving from a cell to its coface, unless they are in the same multivector, because this does not respect the underlying flow.
The multivalued map gives a notion of paths and solutions to . We let . A path is a function where for . Likewise, a solution is a function where . However, there are several trivial solutions in a multivector field. If , then there is a solution where for all . That is, every simplex is a fixed point. This does not match the intuition from differential equations: only a very select set of simplices should be fixed points under . To enforce this, we use the notion of a critical multivector. But first, we define the mouth of a set , denoted , to be . The multivector is critical if . Intuitively, critical multivectors with one maximal element correspond to stationary points in the flow setting. Thus, only simplices in critical multivectors should be fixed points under . Essential solutions enforce this requirement [20].
Definition 1 (Essential Solution).
Let denote a solution to the multivector field . If for every where is not critical, there exists a pair of integers where and , then is an essential solution.
 |
 |
 |
 |
 |
 |
 |
 |
The invariant part of a set , denoted , is given by the set of simplices for which there exists an essential solution where for some . A set is an invariant set if and only if . For examples of invariant sets, see Figure 2. We are interested in a special type of invariant set.
Definition 2 (Isolated Invariant Set, Isolating Set).
Let be an invariant set under . If there exists a closed set such that and every path where has the property that , then is isolated by and is an isolated invariant set. Moreover, the set is an isolating set for .
Figure 3 illustrates the concept of isolation. An invariant set is -compatible if is equal to the union of a set of multivectors in . For examples, see Figure 4. This gives an equivalent formulation of an isolated invariant set.
Proposition 3.
[19, Proposition 4.1.21] An invariant set is isolated if and only if it is convex and -compatible.
3 Tracking Isolated Invariant Sets
In this section, we introduce the protocol for tracking an isolated invariant set across multivector fields. Results in the continuous theory imply that under a sufficiently small perturbation, some homological features of an isolated invariant set do not change. Hence, we require a notion of a small perturbation of a multivector field. In particular, let and denote two multivector fields on . If each multivector is contained in a multivector , , and , then is an atomic refinement of . It is so-called because is obtained by “splitting” exactly one multivector in into two multivectors, while all the other multivectors remain the same. Symmetrically, we say that is an atomic coarsening of . More broadly, it is said that and are atomic rearrangements of each other. In Figures 5, 6, 7, 8, and 9, the two multivector fields are atomic rearrangements of each other. In these figures, we draw the multivectors that are splitting or merging in red.
Given an isolated invariant set under , and an atomic rearrangement of denoted , we aim to find an isolated invariant set that is a minimal perturbation of . We accomplish this through two mechanisms: continuation and persistence. When we use continuation, or when we attempt to continue, we check if there exists an under that is in some sense the same as . If there is at least one such , then we choose a canonical one. This is explained in Section 4. If there is no to which we can continue, then we use persistence. In particular, we choose a canonical isolated invariant set under , and while does not continue to , we can use zigzag persistence to observe which features of are absorbed by . We elaborate on this scheme in Section 5. To choose , we require the following result.
Proposition 4.
[19, Corollary 4.1.22] Let be a convex and -compatible set. Then is an isolated invariant set.
The set is an isolated invariant set by assumption, so Proposition 3 implies that is convex and -compatible. Thus, if is also -compatible, a natural choice is then to use Proposition 4 and take . However, if is not -compatible, then the situation is more complicated. The set is not -compatible precisely when is an atomic coarsening of , and the unique multivector , occasionally called the merged multivector, has the properties that and . In such a case, we use the notation to denote the intersection of all -compatible and convex sets that contain . The simplicial complex is -compatible and convex, so always exists and .
We observe that is -compatible and convex, and thus it is the minimal convex and -compatible set that contains .
In such a case, we use Proposition 4 and take ). These principles are enumerated in the following Tracking Protocol.
Tracking Protocol
Given a nonempty isolated invariant set under , and an atomic rearrangement of denoted , use the following rules to find an isolated invariant set under that corresponds to .
-
1.
Attempt to track via continuation:
-
(a)
If is an atomic refinement of , then take .
-
(b)
If is an atomic coarsening of , and the unique merged multivector has the property that , then take .
-
(c)
If is an atomic coarsening of , and the unique merged multivector has the property that , then take .
-
(d)
If is an atomic coarsening of and the unique merged multivector satisfies the formulae and , then consider . If , then take .
-
(e)
Else, it is impossible to track via continuation.
-
(a)
-
2.
If it is impossible to track via continuation, then attempt to track via persistence:
We include an example of Step 1a in Figure 5, Step 1b in Figure 6, Step 1c in Figure 7, Step 1d in Figure 8, and Step 2f in Figure 9. Each figure depicts a multivector field and a seed isolated invariant set on the left, and an atomic rearrangement and the resulting isolated invariant set on the right. By iteratively applying this protocol (until , in which case we are done), we can track how an isolated invariant set changes across several atomic rearrangements. See Figure 10 and the associated barcode in Figure 11. The following proposition shows that any two multivector fields and can be related by a sequence of atomic rearrangements, and hence the Tracking Protocol can be used to track how an isolated invariant set changes across an arbitrary sequence of multivector fields.
Proposition 5.
For each pair of multivector fields and over , there exists a sequence , , …, where each each is an atomic rearrangement of for .
Proof.
Let denote the multivector field over where each simplex is contained in its own multivector. That is, . We will show that there exists a sequence and a sequence where each (or ) is an atomic refinement of (or ). This immediately gives a sequence . Note that because the reverse of an atomic refinement is an atomic coarsening, this sequence of multivectors is a sequence of consecutive atomic refinements followed by atomic coarsenings.
Hence, all that is necessary is to find a sequence and . Without loss of generality, we consider the former. Consider an arbitrary multivector where (if there is no such , then and we are done). Take a maximal element (with respect to ), and let . Effectively, we have partitioned the multivector into one multivector that only contains and the remainder of the multivector. If we iteratively repeat this process, then we must arrive at in a finite number of steps, because each step creates a new multivector consisting of a single simplex, and multivectors are never merged. Furthermore, note that each time we split a multivector constitutes an atomic refinement. Hence, by iterating this process, we obtain a sequence where each multivector field is related to its predecessor by atomic refinement. Thus, we can combine these sequences as previously described, and we are done. ∎
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |









4 Tracking via Continuation
Now, we introduce continuation in the combinatorial setting, and we justify the canonicity of the choices made in Step 1 of the Tracking Protocol. In addition, we show that if Step 1 is used to obtain from , then and are related by continuation. Continuation is closely related to the Conley index, so we begin with a brief review of the topic.
4.1 Index Pairs and the Conley Index
Originally developed in the classical setting by Conley [4], the Conley index associates a homological invariant with each isolated invariant set. It is defined through index pairs.
Definition 6 (Index Pair).
Let denote an isolated invariant set under , and let and denote closed sets where . If the following all hold, then is an index pair for :
-
1.
-
2.
-
3.
 |
 |
 |
For examples, see Figure 12. If is an index pair for , then the -dimensional Conley index of is . The authors in [20] showed that the Conley index is well-defined.
Theorem 7.
[20, Theorem 5.16] Let and denote index pairs for . Then for all .
For a single isolated invariant set, there may be many possible index pairs. However, we can choose a canonical one, namely, the minimal index pair.
Proposition 8.
[20, Proposition 5.3] Let denote an isolated invariant set. The pair is an index pair for .
The following two propositions show that convex and -compatible sets are crucial for finding index pairs.
Proposition 9.
[20, Proposition 5.6] Let be an index pair under . Then is convex and -compatible.
Proposition 10.
If is convex and -compatible, then is an index pair for .
Proof.
By Proposition 4 the set is an isolated invariant set. Since , we immediately get condition 3 from Definition 6. Since is -compatible we get , and thus, condition 1. To see condition 2 consider . By the definition of there exists an such that either or . In the first case , because is -compatible and . Therefore . If then , because is closed. Hence, it follows that . ∎
4.2 Combinatorial Continuation and the Tracking Protocol
We now move to placing continuation in the combinatorial setting and explaining Step 1 of the Tracking Protocol. In essence, a continuation captures the presence of the “same” isolated invariant set across multiple multivector fields. We then show that Step 1 of the Tracking Protocol does use continuation to track an isolated invariant set.
Definition 11.
Let , , …, denote a sequence of isolated invariant sets under the multivector fields , , …, , where each is defined on a fixed simplicial complex . We say that isolated invariant set continues to isolated invariant set whenever there exists a sequence of index pairs , , …, where is an index pair for both and . Such a sequence is a sequence of connecting index pairs.
 |
 |
 |
 |
Each index pair in a connecting sequence of index pairs is an index pair for a pair of consecutive isolated invariant sets and (see Figures 13 and 14). Hence, the isolated invariant sets in the continuation all have the same Conley index. In this sense, we are capturing the “same” isolated invariant set. In Step 1 of the Tracking Protocol, we first attempt to track the isolated invariant set via continuation. That is, if we use Step 1, then we choose such that and have a common index pair, say . It so happens that is easy to find algorithmically. We begin with the refinement case, or Step 1a.
Theorem 12.
Let and denote multivector fields where is an atomic refinement of . Let be a -compatible and convex set. The pair is an index pair for both under and under .
Proof.
By Proposition 10, if is convex and -compatible, then is an index pair for . By assumption, is -compatible, so is an index pair for . Hence, if we can show that is -compatible, then it will immediately follow by Proposition 10 that is an index pair for . Because is -compatible, it follows that there exists a set of multivectors where . Recall that as is an atomic refinement of , there is exactly one multivector . If , then we are done, and is necessarily -compatible, as each multivector in is a multivector in . If , then we observe that there exist two multivectors where . In such a case, it follows easily that if , then each multivector in is a multivector in and . Hence, is -compatible, and is an index pair for . ∎
In Step 1a of the Tracking Protocol, where is an atomic refinement of , we choose . By Proposition 3, it follows that is -compatible. By identical reasoning to that presented in the proof of Theorem 12, it follows that is also -compatible. Hence, Theorem 12 implies that is an index pair for both and . Thus, and share an index pair.
The case of an atomic coarsening, corresponding to Steps 1b, 1c, and 1d of the Tracking Protocol, is more complicated. Recall that if is an atomic coarsening of , then the unique multivector is called the merged multivector.
Theorem 13.
Let and denote multivector fields where is an atomic coarsening of . Let be a convex and -compatible set, and let be the unique merged multivector. If or , then is an index pair for both and .
Proof.
If , then is both -compatible and -compatible. Thus, Proposition 10 implies that is an index pair for both and .
By Proposition 3, is convex and -compatible. Theorem 13 implies that if or , then is an index pair for both and . In Steps 1b and 1c of the Tracking Protocol, is chosen as . Hence, the index pair is an index pair for both and .
A more complicated case is Step 1d, where and . Recall that denotes the intersection of all convex and -compatible sets that contain , and in particular, is convex and -compatible. In Step 1d of the Tracking Protocol, we first check if . By Proposition 10, if , then is an index pair for . The set is necessarily -compatible, because it is -compatible by construction and it contains the unique merged multivector. Hence, Proposition 4 implies that is an isolated invariant set. Thus, Proposition 10 implies that is also an index pair for . Hence, if Step 1d gives , there is an index pair for and .
In Step 1e of the Tracking Protocol, we claim that if , then it is not possible to continue. Equivalently, there is no that shares an index pair with .
Theorem 14.
Let denote an isolated invariant set under and let denote an atomic coarsening of where the unique merged multivector satisfies the formulae and . Furthermore, let . If , then there does not exist an isolated invariant set under for which there is an index pair satisfying and .
Proof.
Suppose that and there exists an index pair, , for both under and some under . By Proposition 9, the set must be convex and -compatible. Since and is the smallest convex and -compatible set containing , it follows that . Hence, . By assumption, . Thus, . This implies that is not an index pair for , a contradiction. ∎
4.3 Characterizing Tracked Isolated Invariant Sets
Step 1 of the Tracking Protocol provides an avenue for tracking an isolated invariant set across a sequence of atomic rearrangements. In this subsection, we justify the canonicity of the selected isolated invariant set in Step 1 of the Tracking Protocol. First, we observe that we always have an inclusion. Theorem 17 follows directly from the next two results
Proposition 15.
Proposition 16.
Let be an isolated invariant set under , and let denote an isolated invariant set under that is obtained via applying the Tracking Protocol. If is obtained via Step 1d then or .
Proof.
First, we claim that if , and if is the unique merged multivector , then .
If , then there exists a . Because , there exists an essential solution under where . It is easy to check that because is an atomic coarsening of , we have that for every , . Hence, must be a solution under . But, since , it follows that is not an essential solution.
Without loss of generality, we assume that there exists a such that for all , we have that . Because is an essential solution under , and , it follows that . Hence, must not be critical, as if it were, then would be an essential solution under .
Now, aiming for a contradiction, assume there exists a . Then there exists an essential solution under where . Thus, because , we can obtain a new solution where if and if . We have shown that , and by assumption, has the property that . Hence, because is a solution and is an essential solution, we have the property that for all , there exists an where . We can use the same construction to guarantee that there exists an where . Hence, is an essential solution under , where . But this implies that , a contradiction. Hence, there can exist no such , so .
Thus, we have the property that . Let denote an essential solution under . Observe that for each , . Ergo, is also an essential solution under . Hence, . ∎
.
Theorem 17.
If is obtained by applying Step 1 of the Tracking Protocol to , then we have or .
Furthermore, isolated invariant sets chosen by Step 1 minimize the perturbation to in terms of the number of inclusions.
Proposition 18.
Let be an isolated invariant set under , and let be an isolated invariant set under that is obtained by applying Step 1 of the Tracking Protocol to . If is any isolated invariant set under that shares a common index pair with , then . Moreover, if , then .
5 Tracking via Persistence
In the previous section, we explicated Step 1 of the protocol, which uses continuation to track an isolated invariant set across a changing multivector field. In this section, we first place continuation in the persistence framework by showing how to translate the idea of combinatorial continuation into a zigzag filtration [3, 7] that does not introduce spurious information. Then, we use the persistence view of continuation to justify Step 2f of the Tracking Protocol, which permits us to capture changes in an isolated invariant set when no continuation is possible. In particular, it permits us to track an isolated invariant set even in the presence of a bifurcation that changes the Conley index. If the isolated invariant set that we are tracking collides, or merges, with another isolated invariant set, then we follow the newly formed isolated invariant set, and persistence captures which aspects of our original isolated invariant set persist into the new one. Conversely, if an isolated invariant set splits, we track the smallest isolated invariant set that contains all of the child invariant sets. We begin by reviewing some results on computing the persistence of the Conley index from [5].
5.1 Conley Index Persistence
In [5], the authors were interested in computing the changing Conley index across a sequence of isolated invariant sets. A naive approach to computing the persistence of the Conley index is, if given two index pairs and , to take the intersection of the index pairs to obtain the zigzag filtration . However, the intersection of index pairs is generally not an index pair, and as a consequence, the barcode associated with this zigzag filtration does not capture a changing Conley index. In addition, due to the fact that need not be an index pair, the barcode is frequently erratic. We include an example in Figure 15.
 |
 |
 |
To handle this problem, the authors in [5] introduced a special type of index pair.
Definition 19.
Let denote an isolated invariant set, and let denote an isolating set for . The pair of closed sets is an index pair for in if all of the following hold:
-
1.
-
2.
-
3.
-
4.
Every index pair in is also an index pair in the sense of Definition 6 (see [5]). The canonical choice of an index pair for can be used to obtain a canonical index pair for in via the push forward. The push forward of a set in , denoted , is given by the set of simplices for which there exists a path in where and . If is clear from the context we write .
Theorem 20.
[5, Theorem 15] Let be an isolated invariant set under , and let be an isolating set for . The pair is an index pair in for .
Index pairs in are particularly useful because, unlike standard index pairs, their intersection is guaranteed to be an index pair. For two multivector fields and , an intermediate multivector field is , where .
Theorem 21.
[5, Theorem 10] Let and denote index pairs in under and , respectively. The pair is an index pair in under .
Hence, given an index pair in under and an index pair in under , we can obtain a relative zigzag filtration where each pair is an index pair under a different multivector field. This zigzag filtration permits capturing a changing Conley index via persistence. We include an example in Figure 16.
 |
 |
 |
5.2 From continuation to filtration
Now, we show that a continuation of an isolated invariant set to can be expressed in terms of persistence. Namely, a corresponding sequence of connecting index pairs , , …, can be turned into a zigzag filtration, that is a sequence of pairs such that either or . Ideally, each would be an index pair for some from the initial continuation so as to not introduce spurious invariant sets or Conley indices. A connecting index pair is an index pair for both under and for under . Thus, and are both index pairs for under . We will construct auxiliary index pairs for and then relate and with a zigzag filtration using these auxiliary pairs. If we can connect all adjacent pairs and with a zigzag filtration, then we can concatenate all of these zigzag filtrations and transform a sequence of connecting index pairs into a larger zigzag filtration. The following results are important for achieving this.
Proposition 22.
[20, Proposition 5.2] Let denote an index pair for . The set is an isolating set for .
Proposition 23.
Let denote an index pair for under . The pair is an index pair for in under .
Proof.
First, we observe that because is an index pair. In addition, by definition. Since is an index pair, it has the property that . In the case of index pairs in , we require that , so this case is immediately satisfied. Finally, because is an index pair, . Thus, . ∎
Theorem 24.
Let and denote index pairs for in under . The pair is an index pair for in under .
Proof.
By Theorem 21, the pair is an index pair in under . Hence, it is sufficient to show that . Furthermore, and . Hence, and . Ergo, . In addition, and . Hence, , so it follows that . Thus, . Ergo, it remains to be shown that .
Aiming for a contradiction, assume that there exists an . Equivalently, there exists an essential solution where . Because , but , there must exist an where . Similarly, there must exist an where .
We claim that for all , . To contradict, assume that this is not the case. Then there must exist some first where . However, . By definition of an index pair in , if and , then . Hence, since , it follows that . But by assumption, . Therefore, there is no such , so for all , we have that . The same argument implies that for all , we have that .
Thus, it follows that for all , . Ergo, , a contradiction. Hence, no such can exist, which implies that no such can exist. Thus, . ∎
Now, we move to using these results to translate a sequence of connecting index pairs into a zigzag filtration. For , and are both index pairs for . By Proposition 8, the pair is an index pair for . Hence, a natural approach is to find a zigzag filtration that connects with and a zigzag filtration that connects with . If we can find such zigzag filtrations for all , then we can concatenate all of them and obtain a zigzag filtration that connects with . We depict the resulting zigzag filtration in Equation 1.
| (1) |
We connect with , and connects with symmetrically. By Proposition 22, is an isolating set for . Thus, by Theorem 20, is an index pair for in . Proposition 23 implies that is an index pair for in . By Theorem 24, is an index pair for in . Hence, we get the following zigzag filtration:
| (2) |
Every pair in Equation 2 is an index pair for under . Thus, we do not introduce any spurious invariant sets. We can concatenate these filtrations to get Equation 1.
We now analyze the barcode obtained for 1. Our main result is Theorem 27, and it follows immediately from the next two results.
Lemma 25.
[20, Lemma 5.10] Let be index pairs for isolated invariant set under such that either or . Then the inclusion induces an isomorphism in homology.
Theorem 26.
If and are index pairs for where , then the inclusion induces an isomorphism in the Conley indices.
Proof.
Theorem 27.
For every , the -dimensional barcode of a connecting sequence of index pairs has bars if .
5.3 Tracking beyond continuation
In the previous subsection, we showed how to convert a connecting sequence of index pairs into a zigzag filtration. Furthermore, we observed that it produces “full” barcodes - they have one bar for each basis element of the Conley index that persists for the length of the filtration. This change of perspective allows us to generalize our protocol to handle cases when it is impossible to continue.
In particular, we consider Step 2f of the protocol. Let denote an isolated invariant set under , and is an atomic coarsening of where the merged multivector has the property that and . In such a case, we consider and take . Theorem 14 implies that if , then it is impossible to continue. However, it may be possible to compute persistence in a way that resembles continuation. Let . Trivially, is closed. If is an isolating set for both and , then we say that and are adjacent. By Theorem 20, is an index pair for in . Similarly, is an index pair for in . Thus, we can use Theorem 21 to obtain the following zigzag filtration.
| (3) |
Suppose that we are iteratively applying Step 1 of the Tracking Protocol, finding a sequence of isolated invariant sets where adjacent ones share an index pair, and we terminate with an isolated invariant set and an index pair . We can connect with with techniques from the previous section. That is, if , then we can find a filtration that connects them:
| (4) |
We can then concatenate this filtration with the zigzag filtration in Equation 3. This effectively completes the Tracking Protocol: when continuation, represented as Step 1, is impossible, we can attempt to apply Step 2f and persistence to continue to track.
In Step 2f, we choose to take . In practice, there may be many isolated invariant sets under that are adjacent to . However, our choice of is canonical.
Proposition 28.
Let denote an isolated invariant set under that is obtained from applying Step 2f of the Tracking Protocol to the isolated invariant set under . If is an isolated invariant set under where , then .
Proof.
By Proposition 4, set is convex and -compatible. Since is the minimal convex and -compatible set containing we get that . By definition, , so . ∎
5.4 Strategy for Step 2g of the Tracking Protocol
We briefly consider Step 2g of Tracking Protocol, which is the case when it is impossible to continue from to some , and does not isolate both and . In such a case, we do not have two index pairs in the same isolating set, so we cannot use Theorem 20 to obtain index pairs in a common . Thus, we cannot use Theorem 21, which permits us to intersect index pairs and guarantee that the resulting pair is an index pair under a known multivector field. Recall that . A natural choice is to take , and consider the zigzag filtration
| (5) |
It is easy to construct examples where is not an index pair under any natural choice of multivector field (see Figure 15). However, this approach may work well in practice. We leave a thorough examination to future work.
6 Conclusion
We conclude with discussing briefly some directions for future work. In Step 2g of the Tracking Protocol, there is a canonical choice of . But, as there is no common isolating set for and , we cannot presently say anything about the persistence of the Conley index from to . Is it possible to compute the Conley index persistence here in a controlled way? Can we meaningfully compute persistence for a different choice of invariant set? Investigation and experiments are likely needed to determine the most practical course of action in this case.
Acknowledgment
This work is partially supported by NSF grants CCF-2049010, CCF-1839252, Polish National Science Center under Maestro Grant 2014/14/A/ST1/00453, Opus Grant 2019/35/B/ST1/00874 and Preludium Grant 2018/29/N/ST1/00449.
References
- [1] M. Allili, T. Kaczynski, C. Landi, and F. Masoni. Acyclic partial matchings for multidimensional persistence: Algorithm and combinatorial interpretation. J. Math. Imaging Vision, 61:174–192, 2019.
- [2] B. Batko, T. Kaczynski, M. Mrozek, and T. Wanner. Linking combinatorial and classical dynamics: Conley index and Morse decompositions. Found. Comput. Math., 20(5):967–1012, 2020.
- [3] G. Carlsson and V. de Silva. Zigzag persistence. Found. Comput. Math., 10(4):367–405, Aug 2010.
- [4] C. Conley. Isolated invariant sets and the Morse index. In CBMS Reg. Conf. Ser. Math., volume 38, 1978.
- [5] T. K. Dey, M. Mrozek, and R. Slechta. Persistence of the Conley index in combinatorial dynamical systems. In Proceedings of the 36th International Symposium on Computational Geometry, pages 37:1–37:17, June 2020.
- [6] T. K. Dey, M. Mrozek, and R. Slechta. Persistence of Conley-Morse graphs in combinatorial dynamical systems. SIAM J. Appl. Dyn. Syst., 2022. To appear.
- [7] T. K. Dey and Y. Wang. Computational Topology for Data Analysis. Cambridge University Press, 2022. https://www.cs.purdue.edu/homes/tamaldey/book/CTDAbook/CTDAbook.pdf.
- [8] H. Edelsbrunner and J. Harer. Computational Topology: An Introduction. American Mathematical Society, Jan 2010.
- [9] H. Edelsbrunner, D. Letscher, and A. Zomorodian. Topological persistence and simplification. Discrete & Computational Geometry, 28(4):511–533, Nov 2002.
- [10] R. Forman. Combinatorial vector fields and dynamical systems. Math. Z., 228:629–681, 1998.
- [11] R. Forman. Morse theory for cell complexes. Adv. Math., 134:90–145, 1998.
- [12] D. Gunther, J. Reininghaus, I. Hotz, and H. Wagner. Memory-efficient computation of persistent homology for 3d images using discrete Morse theory. In 2011 24th SIBGRAPI Conference on Graphics, Patterns and Images, pages 25–32, 2011.
- [13] A. Hatcher. Algebraic Topology. Cambridge University Press, Cambridge, 2002.
- [14] T. Kaczynski, M. Mrozek, and T. Wanner. Towards a formal tie between combinatorial and classical vector field dynamics. J. Comput. Dyn., 3(1):17–50, 2016.
- [15] H. King, K. Knudson, and N. Mramor. Generating discrete Morse functions from point data. Exp. Math., 14:435–444, 2005.
- [16] K. Knudson. Morse Theory Smooth and Discrete. World Scientific, 2015.
- [17] K. Knudson and B. Wang. Discrete Stratified Morse Theory: A User’s Guide. In 34th International Symposium on Computational Geometry (SoCG 2018), volume 99, pages 54:1–54:14, 2018.
- [18] C. Landi and S. Scaramuccia. Relative-perfectness of discrete gradient vector fields and multi-parameter persistent homology. J. Comb. Optim., 2021.
- [19] M. Lipiński. Morse-Conley-Forman theory for generalized combinatorial multivector fields on finite topological spaces. PhD thesis, Jagiellonian University, 2021.
- [20] M. Lipiński, J. Kubica, M. Mrozek, and T. Wanner. Conley-Morse-Forman theory for generalized combinatorial multivector fields on finite topological spaces. arXiv:1911.12698, 2020.
- [21] M. Mrozek. Conley–Morse–Forman theory for combinatorial multivector fields on Lefschetz complexes. Found. Comput. Math., 17(6):1585–1633, Dec 2017.
- [22] M. Mrozek, R. Srzednicki, J. Thorpe, and T. Wanner. Combinatorial vs. classical dynamics: Recurrence. Commun. Nonlinear Sci. Numer. Simul., 108:106226(1–30), 2022.
- [23] M. Mrozek and T. Wanner. Creating semiflows on simplicial complexes from combinatorial vector fields. J. Differential Equations, 304:375–434, 2021.
- [24] J. Munkres. Elements of Algebraic Topology. Addison-Wesley, 1984.
- [25] J. Munkres. Topology. Featured Titles for Topology Series. Prentice Hall, Incorporated, 2000.
- [26] V. Robins, P. J. Wood, and A. P. Sheppard. Theory and algorithms for constructing discrete Morse complexes from grayscale digital images. IEEE Transactions on Pattern Analysis and Machine Intelligence, 33(8):1646–1658, 2011.