TempCLR: Temporal Alignment Representation with Contrastive Learning
Abstract
Video representation learning has been successful in video-text pre-training for zero-shot transfer, where each sentence is trained to be close to the paired video clips in a common feature space. For long videos, given a paragraph of description where the sentences describe different segments of the video, by matching all sentence-clip pairs, the paragraph and the full video are aligned implicitly. However, such unit-level comparison may ignore global temporal context, which inevitably limits the generalization ability. In this paper, we propose a contrastive learning framework TempCLR to compare the full video and the paragraph explicitly. As the video/paragraph is formulated as a sequence of clips/sentences, under the constraint of their temporal order, we use dynamic time warping to compute the minimum cumulative cost over sentence-clip pairs as the sequence-level distance. To explore the temporal dynamics, we break the consistency of temporal succession by shuffling video clips w.r.t. temporal granularity. Then, we obtain the representations for clips/sentences, which perceive the temporal information and thus facilitate the sequence alignment. In addition to pre-training on the video and paragraph, our approach can also generalize on the matching between video instances. We evaluate our approach on video retrieval, action step localization, and few-shot action recognition, and achieve consistent performance gain over all three tasks. Detailed ablation studies are provided to justify the approach design.
1 Introduction
Representation learning on videos has achieved success (Goroshin et al., 2015; Feichtenhofer et al., 2021) in detecting actions in short periods. Recent work has extended it on video-text data (Miech et al., 2019; Radford et al., 2021) to learn a common feature space for zero-shot transfer. In particular, given a paragraph of description, the understanding of long videos is increasingly important and may facilitate AI-assistant applications (Grauman et al., 2022; Lin et al., 2022; Chen et al., 2022).
A long video is usually formulated as a sequence of short video clips. Given a paragraph, each sentence is used to describe, i.e., paired with, the consecutive video clips in a video segment. By matching all sentence-clip pairs (Miech et al., 2020), the full video and the paragraph can be aligned implicitly. However, maximizing the agreement between clips and sentences individually (unit-level) ignores the context of temporal dynamics, which limits the generalization (Goyal et al., 2017). After all, within one video segment, as the action/event progress at each clip varies, the similarity between the clips and the sentence can be naturally different. As such, strictly aligning the sentence with all paired clips, serving as the hard-label, may not always result in an optimal solution.
To incorporate the temporal correlation across clips, Xu et al. (2021) propose to first fuse the representations over a short period for sentences and video clips separately and then align the fused representations. However, such methods only incorporate the local temporal information but still does not model the global temporal correlation. As a paragraph is essentially a sequence of sentences, as shown in Fig. 1, the whole long video and the paragraph should be explicitly compared and aligned (sequence-level). For a video consisting of multiple steps, e.g., instructional video, the temporal dependence between two distant video clips still exists. In this way, for a challenging case where two clips are visually similar but are from different segments (clips in Fig. 1), the global context of order can be utilized to avoid the potential mismatching in unit-level matching.
In this work, we study video-paragraph pre-training and propose a framework TempCLR based on sequence-level comparison to explore temporal dynamics. We directly calculate the distance between full video and paragraph. Without loss of generality, for the paragraph (anchor) and its paired video (positive sample), the sequence-level distance is the minimum cumulative matching cost over the sentences and clips under the constraint of temporal order and is obtained via dynamic time warping (DTW) (Müller, 2007). Then we emphasize the unit order which is naturally exhibited within a sequence, and consider the cases where the temporal consistency between video and paragraph is not met. As a sentence is paired with a segment consisting of multiple clips, we design a negative sampling strategy based on temporal granularity, which shuffles the clips at both unit level and segment level in the paired video. Finally, we apply contrastive learning to maximally align paired video and paragraph. In this way, we can learn representations for clips and sentences which can perceive global temporal context. Then, from the optimal matching with minimum sequence-level distance, we can pair clips with sentences without being confused by visual similarity.

In addition to video-paragraph pre-training, our TempCLR can also be generalized on few-shot action recognition (video-only) where each video is classified through the nearest neighbor search according to the sequence distance. In summary, the contributions are:
-
•
We propose a contrastive learning framework TempCLR to explore temporal dynamics where the learned representation for clips and sentences can facilitate the alignment between sequences.
-
•
Given an anchor, we design a negative sampling strategy based on temporal granularity and shuffle the units in the positive sequence at both segment-level and unit-level. Notably, our method can be generalized to learn representation for both video-paragraph data and video-only data.
-
•
We conduct extensive experiments on three tasks (i.e., video retrieval, action step localization, and few-shot action recognition) and achieve consistent performance gain to demonstrate the effect of our training strategy. Detailed ablation studies are provided to justify the approach design.
2 Related Work
Contrastive learning (CT) has achieved success on images (Chen et al., 2020b; He et al., 2020) and can cluster samples in the feature space properly. The main idea is to group different views of the same image/video instance by minimizing the InfoNCE loss (Oord et al., 2018) while Wang & Isola (2020) explains it from the aspect of uniformity. Besides, it can be applied on imbalanced dataset (Caron et al., 2020) and different feature spaces (Grill et al., 2020; Ma et al., 2021).
Self-supervision on Video has been studied to learn a good feature extractor. Following the idea of temporal jigsaw Huo et al. (2020), the order of frames (Misra et al., 2016; Lee et al., 2017) and clips (Xu et al., 2019) can be used for supervision. However, the length of tuple is fixed and too small (e.g., 4) to model temporal context over the full video and may ignore semantic information. Besides, contrastive learning is also applied for video pre-training where the positive samples can be built by randomly selecting shot video clips (Feichtenhofer et al., 2021), adjusting the time span (Recasens et al., 2021), and performing spatial-temporal augmentation (Jenni et al., 2020). In addition, generative approaches Han et al. (2020); Vondrick et al. (2016) has also been studied.
Multi-modal pre-training for zero-shot transfer has been studied to connect vision and language. CLIP (Radford et al., 2021) applies contrastive learning on image-caption pairs. Yang et al. (2022) and Li et al. (2022) further modify the negative sampling strategy such that the embeddings can be more discriminative at instance-level. Then the pre-training is extended to video understanding Miech et al. (2020); Ging et al. (2020); Gabeur et al. (2020); Alayrac et al. (2020); Wang et al. (2022). To improve the performance, multi-task training has been studied (Li et al., 2020; Luo et al., 2020). As the description of video content can be noisy, TAN (Han et al., 2022) proposes a co-training strategy and use mutual agreement for annotation filtering and VideoCLIP (Xu et al., 2021) proposes a sampling strategy to mitigate the impact of noise in long videos labeling. Besides video and text, audio is also used to benefit the zero-shot tasks (Chen et al., 2021; Shvetsova et al., 2022) by learning a common feature space. As an alternative, the Attention mechanism can also be used to fuse the multi-modal information at each layer (Sun et al., 2019; Su et al., 2019; Chen et al., 2020c).
Sequence alignment For each unit in a sequence, along the temporal order, the indices of matched units from aligned sequence pair shall monotonically increase, and averaged distance over matched units is minimized. Dynamic time wrapping (Müller, 2007) is first proposed and canonical time warping (Zhou & Torre, 2009) is then used to align sequences with different feature dimensionality and is applied in deep learning (Sargin et al., 2007). Meanwhile, a pyramid deep architecture (Wang et al., 2020) or attention mechanism (Bishay et al., 2019; Zhang et al., 2020; Ma et al., 2019) can be designed to integrate multi-scale temporal information into a single feature vector. Besides, regularized by the sequence alignment, pre-training strategies are designed for visual-audio/rhythms synchronization (Cheng et al., 2020; Yu et al., 2022), and video-text alignment (Xu et al., 2021).
3 Approach
We first provide notation and task formulation in Sec. 3.1. Then, we detail the paradigm of our method in Sec. 3.2 and explain how to adapt it for different tasks in 3.3.
3.1 Pre-Training Task Formulation
Given an anchor instance (i.e., a paragraph or a video), we aim to learn a network that can minimize its distance with a positive instance (i.e., a video paired with the paragraph or a video of the same semantic class). For each paragraph/video, since its time span can be long, it is typically formulated as a sequence of sentences/video clips. Then, a network is trained to extract a feature for each sentence/video clip, resulting in a sequence of feature embeddings, i.e., and , where are the sequence units, and are the sequence lengths, and is the dimension of the common feature space. In a pair of video and paragraph, the sentence can be mapped with a few consecutive clips, i.e., is matched with where are the starting and ending feature indexes in for . Then, is not necessarily equal to . In this way, as the intrinsic temporal orders within and are consistent, their distance should be small. In contrast, two sequences should be distant from each other if they cannot be aligned.
3.2 Temporal Alignment Representation with Contrastive Learning

In this section, we explain our contrastive(CT)-based training framework TempCLR. We consider the sequences consisting successive steps of a common topic. Then, we propose our negative sampling strategy and choose to use sequence-level comparison to directly calculate the distance.
The temporal dynamics exhibited in each sequence (i.e., paragraph or video) are representative. To align two sequences, it is also important to ensure the units within the sequences are properly matched. For example, as and are of temporal consistency, when and are aligned, each unit in should also be matched with in where and are assumed to be semantically close to each other. In this way, when two features in are of two different actions but hard to be distinguished due to visual similarity, the network can still utilize the global temporal order to find a proper unit-level matching between and (shown in Fig. 1).
Negative Sampling based on Temporal Granularity. In contrast, for a negative sequence which does not preserve temporal consistency with where is the sequence length, the distance between and should be high. After all, when cannot be aligned with , considering the global temporal order, each unit is also distant from any units in though and can be visually similar (e.g., similar background or foreground objects).
As such, to mitigate the impact from spatial information, we consider preserving temporal order and aim to obtain representations that facilitates the alignment. In detail, as shown in Fig. 2, we propose to generate negative sequence by randomly shuffling and breaking temporal consistency. Since the segment-level matching also exists in the paired sequences, we first alter the segment order and then shuffle the units within each segment. To effectively compare and with , we propose a training framework TempCLR based on contrastive learning.
Contrastive learning (CT) is a self-supervision approach by learning to group the samples with high correlation. CT treats different views of the same instance as correlated (positive) and builds negative pairs by sampling views from different instances. As each instance is an image in Chen et al. (2020a), each view can be generated by performing augmentation on the low-level pixels, i.e., adding effects such as flipping and color distortion. In practice, given a set with instances, for each instance with one single view , another view is generated and is then used to build a positive pair with where the view of other instances in are used to build negative pairs with . Then, the training objective is to minimize the InfoNCE loss (Oord et al., 2018),
| (1) |
where , is the feature for instance after -normalization and is a hyperparameter to rescale the affinity scores. In this way, CT is performing pair-wise comparison where the disagreement between and is induced by the variation of augmentation.
Note, for our approach TempCLR, and served as two different views and the pattern of temporal order that is consistent between and is treated as the instance from which the views are augmented. Then, we can derive the training objective, i.e.,
| (2) |
where is the set of negative sequences derived from . As a complementary component, the sequences generated from other instances unpaired or uncorrelated with can also be included in . However, it introduces more computation workload but does not improve performance effectively (analyzed in Sec. 5.2). As such, for each , we only use the shuffling strategy for negative sample generation. By minimizing , and are trained to be close to each other while both of them are pushed away from all negative sequences in . Meanwhile, comparing with unit-level comparison between captions and clips, our approach provides a soft supervision on unit-level comparison and we provide detailed comparison in Sec. A.4.6.
Sequence-level distance. To jointly consider the unit-level matching in sequence alignment, we choose to use Dynamic Time Wrapping (DTW, Müller (2007)), which calculates the minimum cumulative matching costs over units as the sequence distance. The set of matched units is called optimal alignment and is recorded in a matching matrix with binary indicators.
There are two constraints in DTW, 1) is supposed to be matched with at least one unit in , i.e., for , and vice versa; 2) Following the exhibited temporal order, the index of matched units should be monotonously increasing, i.e., if matches where and , cannot match with any unit in and . Thus, for and , when , and are matched and assumed to be semantically close to each other. For implementation, we first calculate the pair-wise matching costs where is the cost, i.e., cosine distance (Singhal et al., 2001), between and . Then, DTW employs dynamic programming and sets a matrix to record the minimum cumulative cost between and (Wang et al., 2020; Dixit et al., 1990), i.e.,
| (3) |
where and . Then, the sequence distance is . Besides, Cao et al. (2020) propose OTAM, a variant of DTW, to avoid restrict boundary constraint DTW (Müller, 2007). The effect of DTW and OTAM in TempCLR are also studied in Sec. 4 & 5.
3.3 Adaptation for Pretraining Tasks
We briefly explain how to apply the paradigm to align the video and paragraph in one semantically-correlated pair (video-paragraph) or videos of the same class (video-only) during network training.
Video-Paragraph. For each long video, a paired paragraph consisting of short sentences is provided and every sentence, i.e., caption, describes the visual content within a temporal segment. Firstly, for paragraph, we learn a text encoder to extract feature for each sentence. Then, for the video, all frames are grouped into non-overlapping consecutive video clips and each clip, serving as a visual token, has frames. Thus, each sentence is paired with multiple consecutive clips. We use a backbone to extract token embedding for each clip. Then, a video encoder is trained to map each clip embedding to the clip feature where all clip features for all sentences are concatenated as . As the segments for different sentences may have overlap, during training, we will sub-select the sentences to have such that there is no repeating clips in .
Video-only. Since the duration of action is usually short, we formulate the video as the sequence of frames. As there is no temporal segmentation within each action, we generate the negative sequences by directly shuffling the frames. In this way, the network is learned in a self-supervised manner.
4 Experiment
We first conduct experiments on video retrieval and action step localization to explain the benefit of TempCLR for zero-shot transfer in long video understanding. Then, we explain the experiments on few-shot action recognition to indicate the generalization ability from global temporal modelling on new classes. For the convenience of description, we interchangeably use caption and sentence.
4.1 Implementation Details of Video-Text Pre-Training
We follow Xu et al. (2021) and use HowTo100M (HT100M) (Miech et al., 2019) for pre-training. As HT100M is too large ( 1.2M videos), due to limited computation resource, we build our model on top of the VideoCLIP (Xu et al., 2021) i.e., initialize the VideoCLIP network with its fully-trained model, and randomly select 90k videos (7.5%) of HT100M to update the network by minimizing . VideoCLIP consists of two Transformers (Vaswani et al., 2017) as encoders for video and paragraph separately. For each clip, they use its S3D feature (Xie et al., 2018) as embedding. For each sentence, the token embeddings are obtained via a lookup table (Devlin et al., 2018). One MLP layer is set to map clip embeddings and align the dimension of sentence embeddings. During pre-training, all encoder parameters are updated. More experiment details can be found in Appendix.
4.2 Video-Text Downstream Evaluation
4.2.1 Video Retrieval
Setup and Metric. We evaluate our approach under two settings Full-Video and Caption-Clip. (Full-Video) Given a paragraph which contains a set of sentence queries, describing multiple parts of an entire long video, the full video should be directly retrieved. To represent the full video, we can either concatenate all clips which have paired captions (i.e., remove background), or directly use the full video with background. For retrieval, we can use DTW to measure the distance between the full video and the paragraph directly. Meanwhile, we can still utilize the unit-level comparison, i.e., each caption can be used to match the clip first and the video with the most matched clips will be retrieved, i.e., Cap. Avg. (Caption-Clip) given a sentence description as a query, we retrieve the video clips directly. For both setups, we use recall as metrics, i.e., R@1, R@5, R@10.
Dataset. We evaluate the model pretrained with our TempCLR on YoucookII(Zhou et al., 2018) without any finetuning (i.e., zero-shot). The evaluation set consists of 3350 caption-clip pairs from 436 videos in total. The videos existing in YouCookII have been removed from HT100M.
Result. (Full-Video) As summarized in Table LABEL:tab:full-retrieval, with Cap. Avg as measurement, when background is removed, VideoCLIP has already outperformed MCN clearly (Exp(3,4)). However, as VideoCLIP is not trained to explore the global temporal context, the performance drops when DTW is used as measurement. In contrast, though our approach is only trained with 7.5% of HT100M full set, benefiting from temporal modelling, TempCLR can effectively improve the performance (Exp(5,7)) without hurting the retrieval between clips and captions (Exp(4,6)). Then, we assume no temporal annotation is provided for full-video retrieval and retrieve full video containing background. As the spatial information in background may distract the sentence features, comparing with the scenario when background is removed, the recall by TempCLR drops. However, from Table LABEL:tab:full-retrieval and LABEL:tab:metric, by using either OTAM or DTW for video-paragraph comparison, our TempCLR can outperform the VideoCLIP baseline consistently. (Caption-Clip) As summarized in Table LABEL:tab:unit-retrieval, by minimizing , the attention mechanism in Transformer is trained to embed global temporal information into each clip feature, which may then facilitate the such unit-level retrieval and achieves slight gain over strong baseline VideoCLIP. For MMFT, the extra audio information can be used to benefit the retrieval.
4.2.2 Action Step Localization
Setup and Metric. Each video is associated with a Task consisting of multiple steps (i.e., sentences). Then, each video frame should be assigned with the corresponding step and we use recall as metric.
Dataset. We perform evaluation on CrossTask (Zhukov et al., 2019) and the test set contains 1690 annotated videos over 18 Tasks. We first apply our model pre-trained on HT100M on CrossTask test set for zero-shot evaluation. Then, following Xu et al. (2021), we finetune the VideoCLIP model on 540 videos with our and then evaluate the finetuned model on test set (Supervised).
Result. (Zero-shot) As shown in Table LABEL:tab:localization, when we update VideoCLIP with the 7.5% subset using its original loss (Exp(8)), the model overfits and the performance drops slightly. However, for TempCLR, by adding loss , we can still improve the recall from 33.9 to 36.9. (Supervised) VideoCLIP has shown strong performance, but TempCLR can still increase the recall to 52.5. Furthermore, by finetuning on only 100 videos (20% of train set), our approach can effectively improve the performance, which also demonstrates the benefit from exploring the temporal order modelling.
4.3 Few-shot Action Recognition
Setup and Metric. Given a Task where each class has only labeled video as reference (i.e., -shot), we classify a test video by comparing its average distance with labeled videos of each class through nearest neighbor search. Following the protocol (Zhu & Yang, 2018), we first pre-train the model on a dataset of classes and directly evaluated on few-shot tasks which are sampled from another dataset of classes and .
| \hlineB3 Approach | 1-shot | 5-shot |
|---|---|---|
| TSN++* | 33.6 | 43 |
| CMN++* | 34.4 | 43.8 |
| RTRN++* | 38.6 | 48.9 |
| OTAM (Cao et al., 2020) | 42.8 | 52.3 |
| TRX (Perrett et al., 2021) | 42.0 | 64.6 |
| MTFAN (Wu et al., 2022) | 45.4 | 60.4 |
| TempCLR (Ours) | 47.8 | 67.7 |
| \hlineB3 *:Results are reported in Cao et al. (2020) | ||
Dataset. We use sth-sth V2 (Goyal et al., 2017) for experiment and follow the subset split in Cao et al. (2020). The subset contains 100 classes where and is 24 (12) classes are for evaluation (validation). During evaluation, each Task contains 5 classes and has 15 test videos per class while . Finally, we report the mean accuracy over 10k Tasks. As only using spatial content is unreliable, temporal modelling is thus specifically required for correct prediction.
Results For fair comparison, we first use a ResNet50 model pretrained on ImageNet (Deng et al., 2009) to extract embedding for each frame which are fed into a Transformer to obtain features in . As for , we set a linear layer to process each frame embedding. Then, we use the pre-trained model as initialization and follow the training of OTAM and TRX. More details can be found in Sec. A.3. TempCLR differs from Cao et al. (2020) by applying self-supervision and using a shuffled version of as , while they apply meta-training (Snell et al., 2017) between video instances. TRX also employs a Transformer but only learns the temporal order between a pair/triple of frames and the learning efficiency is limited. In contrast, TempCLR directly models the temporal context.
5 Discussion
5.1 Unit Matching in Sequence Alignment
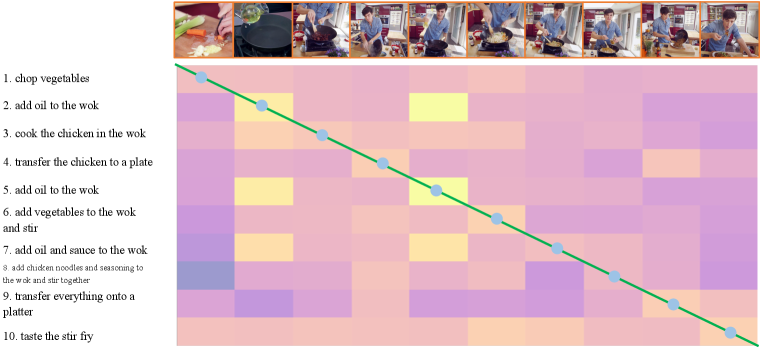
When we directly measure the global distance between video and paragraph, it is also very important to ensure the matched caption-clip pairs are semantically close to each other. As visualized in Fig. LABEL:fig:visualization-main, for the full video directly retrieved by a paragraph, our approach can also correctly match all captions with the video clips. However, if we only rely on the unit-level similarity, the high visual similarity can cause false prediction. More visualization can be found in appendix.
In addition, as shown in Table LABEL:tab:ablation(a), we check percentage of correctly matched clip-caption pairs averaged over all videos. Then, our TempCLR can correctly match more caption-clip pairs than VideoCLIP when the video is compared with paragraph using DTW. In this way, given a paragraph, our approach can also mitigate the distraction from unpaired videos.
5.2 Negative Sample Selection
For each anchor sequence , we generate negative samples from the positive sample by 1) considering the difference regarding temporal granularity and 2) shuffling the order to break the temporal consistency. Then, we discuss alternative strategies.
Video-Paragraph. For each paragraph (anchor), in addition to shuffle the segments first and then shuffle the clip embeddings within each segment (seg-unit), we can also only shuffling the segments while maintaining the clip order within each segment (seg-only). Meanwhile, an intuitive strategy is to use the video unpaired with the anchor to build negative samples (unpaired) or combine it with seg-unit joint. In addition, we can aggressively shuffle all clips embeddings in (all-unit), or only shuffle the clip embeddings within each segment (within-seg).
As shown in Table 5.2, we compare the performance on CrossTask under Supervised. (1) Since we use VideoCLIP as initialization and the model has been trained to distinguish clips from different video instances, the sequence-level distance of negative samples in unpaired has already been high. Furthermore, as the temporal consistency hardly exists between video and unpaired paragraph, the gain by unpaired is inevitably limited. (2) According to Exp(2-4), since each caption is supposed to align with all of the clips in the paired segment, breaking the order of segments in , i.e., seg-only and seg-unit, is essential in facilitating model training. From Sec. 5.1, when two sequences are aligned using DTW, the matched units are also semantically close to each other. Thus, when is compared with , the matched units can indicate the clip features which may cause the most confusion in caption-clip matching due to high visual similarity. In this way, by minimizing , the network is then trained to distinguish those clip features which may hurt the alignment between and . Then, when the segment order is preserved, comparing with VideoCLIP baseline (i.e., 47.3), within-seg results in worse generalization as the confusing clips across segments are not detected and the model can be trained to overfit to trivial difference between clips under the same segment. In contrast, when the segment order is broken, shuffling the clip Table 2: Ablation study (%) of negative sampling. \hlineB3 Exp. Strategy Recall 1 un-paired 48.0 2 within-seg 46.4 3 seg-only 52.1 4 seg-unit 52.5 5 all-unit 49.3 6 joint 52.5 7 visual-anchor 52.0 \hlineB3 order within each segment further can serve as data augmentation, which can improve the recall slightly from 52.1 to 52.5. Furthermore, (3) all-unit only introduce limited gain since the continuity across clips in one segment is broken and it is too hard for the model to learn. Combining unpaired and seg-unit in joint does not provide clear gain over seg-unit. However, we think the main reason is that VideoCLIP has been well-trained for instance discrimination and believe joint is still necessary when TempCLR is trained from scratch. Lastly, we can also shuffle the sentence embeddings w.r.t a video (visual-anchor) which is equivalent to seg-only and achieve reasonably high performance.
Video-Only. As an alternative, we can also shuffle the frame features of other videos as and keep training the model in a self-supervised manner. However, since the distance between different video instances has already been high, the model is not well learned and the accuracy is 38.2.
5.3 Component Analysis and Ablation Study
Modelling of global temporal context has been studied for long-video understanding. A popular way is to employ Transformer architecture to model the correlation between clips automatically. However, by explicitly modelling the temporal orders, as demonstrated in Sec. 4, TempCLR is capable to provide consistent gain over three tasks under six different setups from the strong baseline. Thus, the comparison with VideoCLIP already serves as ablation studies to demonstrate the importance of explicit regularization for temporal modelling. After all, the Attention mechanism may require many data to fully understanding the temporal correlation. In addition, specifically for videos, the labels are noisy such as misalignment between ASR transcription and long video (Miech et al., 2020), the attention modelling can also be distracted by background which hurts the training efficiency. As such, our approach provides a general framework aiming to utilize temporal context.
Supervised on CrossTask. As summarized in Table LABEL:tab:ablation, we use CrossTask study the effect of in pre-training (PT) stage and downstream finetuning (DS) stage. For TempCLR, i.e., with in PT, as the model has been trained to model global temporal order, finetuning without can also improve the recall. Meanwhile, though the temporal pattern learned PT may not exactly the same of data in DS, as finetuning with in DS is very important for down-stream evaluation, the performance are comparable when either VideoCLIP or TempCLR is used for initialization.
DTW Vs. OTAM. From Table. LABEL:tab:metric, as the temporal annotation is given in video-paragraph pretraining, using DTW or OTAM achieves similar performance. However, even when annotation is not given in Video-only task, employing either OTAM or DTW does not impact the performance significantly (47.7 for 1-shot). More details can be found in the appendix.
6 Conclusion
In this paper, we have proposed TempCLR, a contrastive learning framework to align the temporal dynamics exhibited in video-paragraph pre-training, where the paragraph/video can be represented as a sequence of sentences/clips and are learned to match their global content following the consistent temporal order. Specifically, to encourage temporal modeling over the full sequences and the effectiveness of explicit sequence comparison, we propose to generate negative samples by shuffling clips of the paired video from different temporal granularities. In this way, we can adjustably maximize the agreement between sequences with temporal order consistency and maximize the distance between unaligned sequences with different temporal coherency. Our TempCLR achieves consistent performance gain on three tasks under six different setups, which experimentally demonstrated the effectiveness of our framework. We also provide analysis to validate our design choice of negative sampling, which is shown to both benefits the sequence-level alignment and the unit-level matching.
Acknowledgement This material is based on research sponsored by Air Force Research Laboratory (AFRL) under agreement number FA8750-19-1-1000. The U.S. Government is authorized to reproduce and distribute reprints for Government purposes notwithstanding any copyright notation therein. The views and conclusions contained herein are those of the authors and should not be interpreted as necessarily representing the official policies or endorsements, either expressed or implied, of Air Force Laboratory, DARPA or the U.S. Government.
References
- Alayrac et al. (2016) Jean-Baptiste Alayrac, Piotr Bojanowski, Nishant Agrawal, Josef Sivic, Ivan Laptev, and Simon Lacoste-Julien. Unsupervised learning from narrated instruction videos. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 4575–4583, 2016.
- Alayrac et al. (2020) Jean-Baptiste Alayrac, Adria Recasens, Rosalia Schneider, Relja Arandjelović, Jason Ramapuram, Jeffrey De Fauw, Lucas Smaira, Sander Dieleman, and Andrew Zisserman. Self-supervised multimodal versatile networks. Advances in Neural Information Processing Systems, 33:25–37, 2020.
- Anne Hendricks et al. (2017) Lisa Anne Hendricks, Oliver Wang, Eli Shechtman, Josef Sivic, Trevor Darrell, and Bryan Russell. Localizing moments in video with natural language. In Proceedings of the IEEE international conference on computer vision, pp. 5803–5812, 2017.
- Bishay et al. (2019) Mina Bishay, Georgios Zoumpourlis, and Ioannis Patras. Tarn: Temporal attentive relation network for few-shot and zero-shot action recognition. arXiv preprint arXiv:1907.09021, 2019.
- Cao et al. (2020) Kaidi Cao, Jingwei Ji, Zhangjie Cao, Chien-Yi Chang, and Juan Carlos Niebles. Few-shot video classification via temporal alignment. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 10618–10627, 2020.
- Caron et al. (2020) Mathilde Caron, Ishan Misra, Julien Mairal, Priya Goyal, Piotr Bojanowski, and Armand Joulin. Unsupervised learning of visual features by contrasting cluster assignments. Advances in Neural Information Processing Systems, 33:9912–9924, 2020.
- Chen et al. (2021) Brian Chen, Andrew Rouditchenko, Kevin Duarte, Hilde Kuehne, Samuel Thomas, Angie Boggust, Rameswar Panda, Brian Kingsbury, Rogerio Feris, David Harwath, et al. Multimodal clustering networks for self-supervised learning from unlabeled videos. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pp. 8012–8021, 2021.
- Chen et al. (2022) Long Chen, Yulei Niu, Brian Chen, Xudong Lin, Guangxing Han, Christopher Thomas, Hammad Ayyubi, Heng Ji, and Shih-Fu Chang. Weakly-supervised temporal article grounding. In Empirical Methods in Natural Language Processing, 2022.
- Chen et al. (2020a) Ting Chen, Simon Kornblith, Mohammad Norouzi, and Geoffrey Hinton. A simple framework for contrastive learning of visual representations. In International conference on machine learning, pp. 1597–1607. PMLR, 2020a.
- Chen et al. (2020b) Xinlei Chen, Haoqi Fan, Ross Girshick, and Kaiming He. Improved baselines with momentum contrastive learning. arXiv preprint arXiv:2003.04297, 2020b.
- Chen et al. (2020c) Yen-Chun Chen, Linjie Li, Licheng Yu, Ahmed El Kholy, Faisal Ahmed, Zhe Gan, Yu Cheng, and Jingjing Liu. Uniter: Universal image-text representation learning. In European conference on computer vision, pp. 104–120. Springer, 2020c.
- Cheng et al. (2020) Ying Cheng, Ruize Wang, Zhihao Pan, Rui Feng, and Yuejie Zhang. Look, listen, and attend: Co-attention network for self-supervised audio-visual representation learning. In Proceedings of the 28th ACM International Conference on Multimedia, pp. 3884–3892, 2020.
- Deng et al. (2009) Jia Deng, Wei Dong, Richard Socher, Li-Jia Li, Kai Li, and Li Fei-Fei. Imagenet: A large-scale hierarchical image database. In 2009 IEEE conference on computer vision and pattern recognition, pp. 248–255. Ieee, 2009.
- Devlin et al. (2018) Jacob Devlin, Ming-Wei Chang, Kenton Lee, and Kristina Toutanova. Bert: Pre-training of deep bidirectional transformers for language understanding. arXiv preprint arXiv:1810.04805, 2018.
- Dixit et al. (1990) Avinash K Dixit, John JF Sherrerd, et al. Optimization in economic theory. Oxford University Press on Demand, 1990.
- Feichtenhofer et al. (2021) Christoph Feichtenhofer, Haoqi Fan, Bo Xiong, Ross Girshick, and Kaiming He. A large-scale study on unsupervised spatiotemporal representation learning. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 3299–3309, 2021.
- Gabeur et al. (2020) Valentin Gabeur, Chen Sun, Karteek Alahari, and Cordelia Schmid. Multi-modal transformer for video retrieval. In European Conference on Computer Vision, pp. 214–229. Springer, 2020.
- Ging et al. (2020) Simon Ging, Mohammadreza Zolfaghari, Hamed Pirsiavash, and Thomas Brox. Coot: Cooperative hierarchical transformer for video-text representation learning. Advances in neural information processing systems, 33:22605–22618, 2020.
- Goroshin et al. (2015) Ross Goroshin, Joan Bruna, Jonathan Tompson, David Eigen, and Yann LeCun. Unsupervised learning of spatiotemporally coherent metrics. In Proceedings of the IEEE international conference on computer vision, pp. 4086–4093, 2015.
- Goyal et al. (2017) Raghav Goyal, Samira Ebrahimi Kahou, Vincent Michalski, Joanna Materzynska, Susanne Westphal, Heuna Kim, Valentin Haenel, Ingo Fruend, Peter Yianilos, Moritz Mueller-Freitag, et al. The” something something” video database for learning and evaluating visual common sense. In Proceedings of the IEEE international conference on computer vision, pp. 5842–5850, 2017.
- Grauman et al. (2022) Kristen Grauman, Andrew Westbury, Eugene Byrne, Zachary Chavis, Antonino Furnari, Rohit Girdhar, Jackson Hamburger, Hao Jiang, Miao Liu, Xingyu Liu, et al. Ego4d: Around the world in 3,000 hours of egocentric video. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 18995–19012, 2022.
- Grill et al. (2020) Jean-Bastien Grill, Florian Strub, Florent Altché, Corentin Tallec, Pierre Richemond, Elena Buchatskaya, Carl Doersch, Bernardo Avila Pires, Zhaohan Guo, Mohammad Gheshlaghi Azar, et al. Bootstrap your own latent-a new approach to self-supervised learning. Advances in neural information processing systems, 33:21271–21284, 2020.
- Han et al. (2020) Tengda Han, Weidi Xie, and Andrew Zisserman. Memory-augmented dense predictive coding for video representation learning. In European conference on computer vision, pp. 312–329. Springer, 2020.
- Han et al. (2022) Tengda Han, Weidi Xie, and Andrew Zisserman. Temporal alignment networks for long-term video. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 2906–2916, 2022.
- He et al. (2020) Kaiming He, Haoqi Fan, Yuxin Wu, Saining Xie, and Ross Girshick. Momentum contrast for unsupervised visual representation learning. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp. 9729–9738, 2020.
- Huo et al. (2020) Yuqi Huo, Mingyu Ding, Haoyu Lu, Zhiwu Lu, Tao Xiang, Ji-Rong Wen, Ziyuan Huang, Jianwen Jiang, Shiwei Zhang, Mingqian Tang, et al. Self-supervised video representation learning with constrained spatiotemporal jigsaw. 2020.
- Jenni et al. (2020) Simon Jenni, Givi Meishvili, and Paolo Favaro. Video representation learning by recognizing temporal transformations. In European Conference on Computer Vision, pp. 425–442. Springer, 2020.
- Kingma & Ba (2014) Diederik P Kingma and Jimmy Ba. Adam: A method for stochastic optimization. arXiv preprint arXiv:1412.6980, 2014.
- Ko et al. (2022) Dohwan Ko, Joonmyung Choi, Juyeon Ko, Shinyeong Noh, Kyoung-Woon On, Eun-Sol Kim, and Hyunwoo J Kim. Video-text representation learning via differentiable weak temporal alignment. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 5016–5025, 2022.
- Lee et al. (2017) Hsin-Ying Lee, Jia-Bin Huang, Maneesh Singh, and Ming-Hsuan Yang. Unsupervised representation learning by sorting sequences. In Proceedings of the IEEE international conference on computer vision, pp. 667–676, 2017.
- Lei et al. (2021) Jie Lei, Linjie Li, Luowei Zhou, Zhe Gan, Tamara L Berg, Mohit Bansal, and Jingjing Liu. Less is more: Clipbert for video-and-language learning via sparse sampling. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 7331–7341, 2021.
- Li et al. (2020) Linjie Li, Yen-Chun Chen, Yu Cheng, Zhe Gan, Licheng Yu, and Jingjing Liu. Hero: Hierarchical encoder for video+ language omni-representation pre-training. arXiv preprint arXiv:2005.00200, 2020.
- Li et al. (2022) Liunian Harold Li, Pengchuan Zhang, Haotian Zhang, Jianwei Yang, Chunyuan Li, Yiwu Zhong, Lijuan Wang, Lu Yuan, Lei Zhang, Jenq-Neng Hwang, et al. Grounded language-image pre-training. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 10965–10975, 2022.
- Lin et al. (2022) Xudong Lin, Fabio Petroni, Gedas Bertasius, Marcus Rohrbach, Shih-Fu Chang, and Lorenzo Torresani. Learning to recognize procedural activities with distant supervision. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 13853–13863, 2022.
- Liu et al. (2019) Yang Liu, Samuel Albanie, Arsha Nagrani, and Andrew Zisserman. Use what you have: Video retrieval using representations from collaborative experts. arXiv preprint arXiv:1907.13487, 2019.
- Luo et al. (2020) Huaishao Luo, Lei Ji, Botian Shi, Haoyang Huang, Nan Duan, Tianrui Li, Jason Li, Taroon Bharti, and Ming Zhou. Univl: A unified video and language pre-training model for multimodal understanding and generation. arXiv preprint arXiv:2002.06353, 2020.
- Ma et al. (2019) Jiawei Ma, Zheng Shou, Alireza Zareian, Hassan Mansour, Anthony Vetro, and Shih-Fu Chang. Cdsa: cross-dimensional self-attention for multivariate, geo-tagged time series imputation. arXiv preprint arXiv:1905.09904, 2019.
- Ma et al. (2021) Jiawei Ma, Hanchen Xie, Guangxing Han, Shih-Fu Chang, Aram Galstyan, and Wael Abd-Almageed. Partner-assisted learning for few-shot image classification. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pp. 10573–10582, 2021.
- Miech et al. (2019) Antoine Miech, Dimitri Zhukov, Jean-Baptiste Alayrac, Makarand Tapaswi, Ivan Laptev, and Josef Sivic. Howto100m: Learning a text-video embedding by watching hundred million narrated video clips. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pp. 2630–2640, 2019.
- Miech et al. (2020) Antoine Miech, Jean-Baptiste Alayrac, Lucas Smaira, Ivan Laptev, Josef Sivic, and Andrew Zisserman. End-to-end learning of visual representations from uncurated instructional videos. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 9879–9889, 2020.
- Misra et al. (2016) Ishan Misra, C Lawrence Zitnick, and Martial Hebert. Shuffle and learn: unsupervised learning using temporal order verification. In European conference on computer vision, pp. 527–544. Springer, 2016.
- Müller (2007) Meinard Müller. Dynamic time warping. Information retrieval for music and motion, pp. 69–84, 2007.
- Oord et al. (2018) Aaron van den Oord, Yazhe Li, and Oriol Vinyals. Representation learning with contrastive predictive coding. arXiv preprint arXiv:1807.03748, 2018.
- Perrett et al. (2021) Toby Perrett, Alessandro Masullo, Tilo Burghardt, Majid Mirmehdi, and Dima Damen. Temporal-relational cross transformers for few-shot action recognition. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 475–484, 2021.
- Radford et al. (2021) Alec Radford, Jong Wook Kim, Chris Hallacy, Aditya Ramesh, Gabriel Goh, Sandhini Agarwal, Girish Sastry, Amanda Askell, Pamela Mishkin, Jack Clark, et al. Learning transferable visual models from natural language supervision. In International Conference on Machine Learning, pp. 8748–8763. PMLR, 2021.
- Recasens et al. (2021) Adria Recasens, Pauline Luc, Jean-Baptiste Alayrac, Luyu Wang, Florian Strub, Corentin Tallec, Mateusz Malinowski, Viorica Pătrăucean, Florent Altché, Michal Valko, et al. Broaden your views for self-supervised video learning. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pp. 1255–1265, 2021.
- Sargin et al. (2007) Mehmet Emre Sargin, Yücel Yemez, Engin Erzin, and A Murat Tekalp. Audiovisual synchronization and fusion using canonical correlation analysis. IEEE transactions on Multimedia, 9(7):1396–1403, 2007.
- Shen et al. (2021) Yuhan Shen, Lu Wang, and Ehsan Elhamifar. Learning to segment actions from visual and language instructions via differentiable weak sequence alignment. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 10156–10165, 2021.
- Shvetsova et al. (2022) Nina Shvetsova, Brian Chen, Andrew Rouditchenko, Samuel Thomas, Brian Kingsbury, Rogerio S Feris, David Harwath, James Glass, and Hilde Kuehne. Everything at once-multi-modal fusion transformer for video retrieval. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 20020–20029, 2022.
- Singhal et al. (2001) Amit Singhal et al. Modern information retrieval: A brief overview. IEEE Data Eng. Bull., 24(4):35–43, 2001.
- Snell et al. (2017) Jake Snell, Kevin Swersky, and Richard Zemel. Prototypical networks for few-shot learning. Advances in neural information processing systems, 30, 2017.
- Su et al. (2019) Weijie Su, Xizhou Zhu, Yue Cao, Bin Li, Lewei Lu, Furu Wei, and Jifeng Dai. Vl-bert: Pre-training of generic visual-linguistic representations. arXiv preprint arXiv:1908.08530, 2019.
- Sun et al. (2019) Chen Sun, Austin Myers, Carl Vondrick, Kevin Murphy, and Cordelia Schmid. Videobert: A joint model for video and language representation learning. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pp. 7464–7473, 2019.
- Vaswani et al. (2017) Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N Gomez, Łukasz Kaiser, and Illia Polosukhin. Attention is all you need. Advances in neural information processing systems, 30, 2017.
- Venugopalan et al. (2014) Subhashini Venugopalan, Huijuan Xu, Jeff Donahue, Marcus Rohrbach, Raymond Mooney, and Kate Saenko. Translating videos to natural language using deep recurrent neural networks. arXiv preprint arXiv:1412.4729, 2014.
- Vondrick et al. (2016) Carl Vondrick, Hamed Pirsiavash, and Antonio Torralba. Generating videos with scene dynamics. Advances in neural information processing systems, 29, 2016.
- Wang et al. (2020) Jianren Wang, Zhaoyuan Fang, and Hang Zhao. Alignnet: A unifying approach to audio-visual alignment. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, pp. 3309–3317, 2020.
- Wang et al. (2022) Jinpeng Wang, Yixiao Ge, Guanyu Cai, Rui Yan, Xudong Lin, Ying Shan, Xiaohu Qie, and Mike Zheng Shou. Object-aware video-language pre-training for retrieval. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 3313–3322, 2022.
- Wang & Isola (2020) Tongzhou Wang and Phillip Isola. Understanding contrastive representation learning through alignment and uniformity on the hypersphere. In International Conference on Machine Learning, pp. 9929–9939. PMLR, 2020.
- Wu et al. (2022) Jiamin Wu, Tianzhu Zhang, Zhe Zhang, Feng Wu, and Yongdong Zhang. Motion-modulated temporal fragment alignment network for few-shot action recognition. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 9151–9160, 2022.
- Xie et al. (2018) Saining Xie, Chen Sun, Jonathan Huang, Zhuowen Tu, and Kevin Murphy. Rethinking spatiotemporal feature learning: Speed-accuracy trade-offs in video classification. In Proceedings of the European conference on computer vision (ECCV), pp. 305–321, 2018.
- Xu et al. (2019) Dejing Xu, Jun Xiao, Zhou Zhao, Jian Shao, Di Xie, and Yueting Zhuang. Self-supervised spatiotemporal learning via video clip order prediction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 10334–10343, 2019.
- Xu et al. (2021) Hu Xu, Gargi Ghosh, Po-Yao Huang, Dmytro Okhonko, Armen Aghajanyan, Florian Metze, Luke Zettlemoyer, and Christoph Feichtenhofer. Videoclip: Contrastive pre-training for zero-shot video-text understanding. In Proceedings of the 2021 Conference on Empirical Methods in Natural Language Processing, pp. 6787–6800, 2021.
- Yang et al. (2022) Jianwei Yang, Chunyuan Li, Pengchuan Zhang, Bin Xiao, Ce Liu, Lu Yuan, and Jianfeng Gao. Unified contrastive learning in image-text-label space. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 19163–19173, 2022.
- Yu et al. (2022) Jiashuo Yu, Junfu Pu, Ying Cheng, Rui Feng, and Ying Shan. Self-supervised learning of music-dance representation through explicit-implicit rhythm synchronization. arXiv preprint arXiv:2207.03190, 2022.
- Zhang et al. (2018) Bowen Zhang, Hexiang Hu, and Fei Sha. Cross-modal and hierarchical modeling of video and text. In Proceedings of the european conference on computer vision (ECCV), pp. 374–390, 2018.
- Zhang et al. (2020) Hongguang Zhang, Li Zhang, Xiaojuan Qi, Hongdong Li, Philip HS Torr, and Piotr Koniusz. Few-shot action recognition with permutation-invariant attention. In European Conference on Computer Vision, pp. 525–542. Springer, 2020.
- Zhou & Torre (2009) Feng Zhou and Fernando Torre. Canonical time warping for alignment of human behavior. Advances in neural information processing systems, 22, 2009.
- Zhou et al. (2018) Luowei Zhou, Chenliang Xu, and Jason J Corso. Towards automatic learning of procedures from web instructional videos. In Thirty-Second AAAI Conference on Artificial Intelligence, 2018.
- Zhu & Yang (2018) Linchao Zhu and Yi Yang. Compound memory networks for few-shot video classification. In Proceedings of the European Conference on Computer Vision (ECCV), pp. 751–766, 2018.
- Zhu & Yang (2020) Linchao Zhu and Yi Yang. Actbert: Learning global-local video-text representations. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp. 8746–8755, 2020.
- Zhukov et al. (2019) Dimitri Zhukov, Jean-Baptiste Alayrac, Ramazan Gokberk Cinbis, David Fouhey, Ivan Laptev, and Josef Sivic. Cross-task weakly supervised learning from instructional videos. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 3537–3545, 2019.
Appendix A Appendix
A.1 Terminology Explanation
In this paper, we study the video-text pre-pretraining for long-video understanding, and specifically focus on the video-paragraph pre-training. As such, we interchangeably use video-text pre-training and video-paragraph pre-pretraining. Here, the paragraph is essentially a set of captions and each caption is used to describe one part, i.e., segment, in the full video. As such, according the order of video segments, the captions can be organized using the same order and represented as a form of paragraph. As the form of caption is a short sentence, we interchangeably use caption and sentence, such as sentence-caption pair and caption-clip pair.
For pre-training on HT100M (Miech et al., 2019), due to the limitation of computational resources, we essentially finetune from the pre-trained VideoCLIP model using 90k videos (7.5%) of HT100M. However, for the convenience description, we still use pre-training for the training on HW100M and use “finetuning” as fine tuning on the train set of downstream task, i.e., CrossTask (Supervised).
In downstream evaluation such as action step localization and few-shot action recognition, we use “Task” to indicate the a localization task (matching each caption in a to different parts in the video) and one few-shot task (classify test videos among the few-shot classes of interest), which is different from “task” used to indicate each of the three task types.
A.2 Implementation Details for Training
A.2.1 Implementation Details for HW100M Pre-training
Architecture.
VideoCLIP (Xu et al., 2021) consists of two Transformer architectures for video and paragraph separately. For videos, a backbone network is used to extract embedding for each clip, i.e., video token, where the clip embeddings are used as the input of the six-layer video transformer. For each sentence, VideoCLIP first tokenize the sentences and obtain the token embedding (e.g., the embedding for each word) from embedding lookup (Devlin et al., 2018). For implementation, VideoCLIP use S3D feature (Xie et al., 2018) as the clip embeddings as the S3D network has been pre-trained on HowTo100M (Miech et al., 2019) in a self-supervised manner (Miech et al., 2020). As the embedding dimensions for clips (512) and language tokens (768) are different, an MLP is set preprocess the clip embeddings and increase their dimension. As such, the trainable network components of VideoCLIP includes two Transformer and one MLP layer. During our pre-training, we update the all parameters.
Dataloading.
As the annotation of temporal segments for long videos is noisy and ASR transcription can also be misaligned with long video (Miech et al., 2020), for each caption, VideoCLIP has designed a strategy
-
•
Extend the timestamps for the caption of interest and the period after extension may include other captions. Then, the newly included captions is concatenated with the caption of interest which are fed in the 12-layer text Transformer.
-
•
Average the Transformer outputs for all of the tokens to obtain one representation for the caption.
-
•
Use the new timestamps to select clip and feed them into 6-layer video Transformer.
-
•
Fuse the information within the segment by averaging the output of video Transformer, i.e., clip features, and obtain a segment representation.
For our approach TempCLR, we reuse its data loading pipeline here to mitigate the potential issue from the noisy annotation.
Training implementation.
As the features of clips in the same segment has been averaged to obtain one segment representation, during pre-training of our TempCLR on HW100M, we directly shuffle the segment features in without shuffling the clips features as the segment feature is independent of the clip feature orders. Meanwhile, during the pre-training, we set the batch size of captions is 256 and the captions are sampled from 16 long videos. As we trained from the VideoCLIP pre-trained model, when all parameters are trained, we set the learning rate as . Then, for comparison, as an ablation study, we only update the parameters in the norm layers such as layer norm and the learning rate is set as . In both case, we train the model on 2 NVIDIA TiTAN RTX GPUs (each with 24 GB memory) for 10 epoches within two hours and use the default hyper-parameters in Adam (Kingma & Ba, 2014) optimizer with betas of (0.9, 0.98).
A.2.2 Implementation Details for CrossTask Finetuning
Architecture.
Refer to VideoCLIP architecture.
Dataloading.
When the model is finetuned on CrossTask for action step localization, we still keep the embedding of each clip and do not fuse them. As such, we can apply the shuffling strategy described in Fig. 2 and the ablation study is provided in Sec. 5.2.
-
•
For each video, we sample clips by sliding window with window size 16 and each clip takes 32 frames, and load all clips of the video into a batch
-
•
Put all the action steps for the given task into the text encoder to get action step representations. Put the sampled clips to the video encoder and expand the clips to full video in frame level (by returning hidden state).
-
•
Filter out background frames and only keep frames with action step labels.
-
•
Generate negative samples by swapping the action step representations and get the alignment loss.
Training implementation.
The learning rate is set as . We use the default hyper-parameters in Adam (Kingma & Ba, 2014) optimizer with betas of (0.9, 0.98)
A.2.3 Implementation Details for Video Pre-Training
Architecture.
We use a ResNet50 pretrained on ImageNet to extract embedding for each frame. The Transformer architecture has 6 layers and output the feature for each frame embedding. The linear layer that is set to process each frame embedding to obtain is also jointly learned.
Data Loading.
Then, we follow Cao et al. (2020) to first determine the starting and ending frame index as well as the sampling rate, then we use the selected frame embeddings as the sequence representing the video. According to the starting and ending frame index as well as the sampling rate, we can determine the frames to be sampled.
Training implementation.
During training, we only train the Transformer while the ResNet50 is not trained. However, for the methods compared in the Table. 4.3, the ResNet50 are tuned. The Transformer is trained from scratch and it uses adam optimizer with default hyper-parameter setting. We use cosine annealing schedule and the initial learning rate is 0.001. Meanwhile, we use the weighted sum (0.3, 0.7) of VideoCLIP loss and our as the final training objective. Since we update the network from the well-trained VideoCLIP parameters, maintaining the original loss of VideoCLIP is to keep the stability of network training. The weight here is also an empirically value that can provide reasonable performance gain and we fix it during the pre-training.
A.3 Downstream Task Explanation
A.3.1 Video Retrieval
Video retrieval has been widely studied and its most popular setting is go retrieve video clips given the sentence/caption as a query, (i.e., caption-clip). Recently, to formulate a more realistic scenario, Chen et al. (2021) formulated full-video retrieval, i.e., given a set of caption queries, i.e., paragraph, describing multiple parts of an entire long video, the task then aims to retrieve the full video according to the paragraph. However, for each long video, Chen et al. (2021) directly concatenate all video clips which has paired sentences. Then, a strong assumption is applied that the background can be removed according to the temporal annotation. As such, we take a step further to consider the full-video retrieval without any temporal annotation and the background are included. The performance is measured by recall, the number of captions/paragraphs that can correctly retrieve the clips/videos. For each language query, we will rank the retrieving result according to the similarity and a correct assignment means the video is correctly retrieved among the videos with top k high similarity, i.e., R@K, and we have
A.3.2 Action Step Localization
This task assumes that each video is associated with a Task consisting of multiple steps. During inference, given a Task and its corresponding step candidates, each video frame/clip is supposed to be assigned to the corresponding step. This assignment is determined according to the similarity between the frame/clip feature with the caption feature, i.e., in a form of classification task. Then, we directly use recall R@1, i.e., number of step assignments that fall into the correct ground truth interval, divided by the total number of steps in the video, as the metric.
A.3.3 Few-shot Action Recognition
For few-shot learning, we are first given a base dataset of classes and a novel dataset of classes where the two class sets are disjoint, i.e., . The base set is used to pre-train a model and the novel dataset is used to sample few-shot Tasks for evaluation.
In each Task, there are classes and each class has training samples, i.e., -way -shot, and the training samples are termed as support, which is used to differentiate from the training data in fully-supervised learning. Also, the support may not be used to finetune the network. In prototype classification, the features of support videos are averaged for each class and the averaged features are used as prototype, i.e., the weights in the classifier, and the classification is done through nearest neighbor search. Then, the test data within each Task is termed as query. Usually, during evaluation, each class have queries to be classified, i.e., queries in total. During testing, for our approach, since we cannot aggregate the sentences into one sentence, we just calculate the distance between the query and all support videos, and use the distance averaged for each class is reference for classification.
Following the common setting (Zhu & Yang, 2018), we set and , i.e., 5-way 1-shot and 5-way 5-shot. We then report the mean accuracy over 10,000 tasks for each task type. To note, as , and no finetuning on support videos in novel is applied, the recognition accuracy can be used to indicate the generalization ability of our approach on new classes.
For the dataset something-something v2 used in our experiment, and class typically asks the relationship between objects, such as something pushes something and the objects can vary from each other in different video instanes. As such, successful recognition on this dataset specifically requires the understanding of global temporal information.
| \hlineB3 Accuracy | 1-shot | 5-shot |
|---|---|---|
| TempCLR w/ OTAM | 47.8 | 62.9 |
| TempCLR w/ TRX | 45.1 | 67.7 |
| \hlineB3 |
For the results reported in few-shot action recognition, we use the model pre-trained under our self-supervision pre-training objective as the initialization and then use the loss proposed in OTAM or TRX for meta-training. The details of the results are reported in Table 3. We note that the initialization for all experiments and all approaches are the same for fair comparison. In this way, we highlight that our approach is orthogonal to the existing meta-training approaches and can significantly improve the few-shot adaptation efficiency. Meanwhile, the performance of TempCLR w/ OTAM on 5-shot is limited by the computational resources by the time of submission. We will provide more results when we access more GPU resources.
A.4 More Experimental Results
A.4.1 Measurement
(Cap. Avg.) still utilizes the unit-level comparison, i.e., each caption can be used to match the clip first. Then, for each video, the number of clips video retrieved by the captions in the set is used to indicate the similarity between the paragraph and the full video
(DTW) Please refer to Sec. 3.2. In particular, for the matching between units, DTW has a strong assumption that is always met.
(OTAM) stands for Ordered Temporal Alignment Module. To avoid the boundary assumption in DTW, Cao et al. (2020) proposed OTAM. The basic idea is to pad the sequence with meaningless unit such as zero vector at the begining and end part. In this way, when dynamic programming is resued to calculate the matching, the first (last) units in the two sequences to be compared are not necessary matched. For detail about the implementation of OTAM, please refer to Cao et al. (2020).
A.4.2 Video retrieval on DiDeMo
We conduct video retrieval experiments on another dataset DiDeMo (Anne Hendricks et al., 2017), which contains 10,000 videos annotated with 40,000 sentences on Flicker videos. We follow VideoCLIP (Xu et al., 2021) and conduct evaluation on 4021 test samples.
As summarized in Table 4, we first conduct experiments on the clip-caption retrieval setting. We follow VideoCLIP and summarized the performance in both zero-shot and supervised. Our TempCLR can consistently improve the performance than the VideoCLIP baseline and even outperform most supervised-based approaches. In particular, the performance at R@5 also outperform the best performance of ClipBERT.
| \hlineB3 Approach | R@1 | R@5 |
|---|---|---|
| Supervised | ||
| S2VT (Venugopalan et al., 2014) | 11.9 | 33.6 |
| FSE (Zhang et al., 2018) | 13.9 | 44.5 |
| CE (Liu et al., 2019) | 16.1 | 41.1 |
| ClipBERT (Lei et al., 2021) | 20.4 | 48.0 |
| Zero-shot transfer | ||
| VideoCLIP (Xu et al., 2021) | 16.6 | 46.9 |
| VideoCLIP† | 16.4 | 47.1 |
| TempCLR | 17.7 | 48.1 |
| \hlineB3 | ||
Then, as compared in Table 5 & 6, we conduct experiments on full-video retrieval (background removed). As the domain between HowTo100M can be distant from the domain of DiDeMo, the retrieval scores are generally lower than those on YouCookII, though the video in DiDeMo is shorter. In this case, we observe that exploring the temporal is very useful for the VideoCLIP baseline and our TempCLR. When the background is removed, Then, our approach TempCLR can consistently improve the performance by using DTW or OTAM as measure. In particular, using OTAM as measure can already achieve higher performance than using Cap. Avg. as measure based on unit-level comparison. At the same time, with Cap. Avg as measure, the retrieval performance is also improved comparing with VideoCLIP baseline. Then, we also perform metric ensembling. For both VideoCLIP and TempCLR, employing metric ensembling can help improve the performance while our TempCLR is consistently better than the VideoCLIP baseline. Finally, for full-video retrieval (background kept), for both VideoCLIP and TempCLR, using either DTW or OTAM as measure can improve the performance consistently than using Cap. Avg. as the measure. Again, as mentioned before, the domain gap between HowTo100M and DiDeMo may make the network difficult to generalize well, which then demonstrates the importance of using temporal context and perform sequence-level comparison directly. Then, TempCLR achieves the best performance when the metrics are ensembled.
| \hlineB3 Measure | R@1 | R@5 | R@10 |
|---|---|---|---|
| VideoCLIP | |||
| DTW | 8.5 | 24.4 | 37.7 |
| OTAM | 8.9 | 26.6 | 38.6 |
| DTW + Cap. Avg. | 10.3 | 28.2 | 38.6 |
| OTAM + Cap. Avg. | 10.6 | 27.7 | 38.8 |
| Cap. Avg. | 8.9 | 27.0 | 37.9 |
| TempCLR | |||
| DTW | 9.2 | 26.6 | 39.4 |
| OTAM | 10.4 | 25.6 | 39.9 |
| DTW + Cap. Avg. | 9.9 | 26.3 | 38.4 |
| OTAM + Cap. Avg. | 10.9 | 25.6 | 40.6 |
| Cap. Avg. | 9.4 | 26.3 | 36.4 |
| \hlineB3 | |||
| \hlineB3 Measure | R@1 | R@5 | R@10 |
|---|---|---|---|
| VideoCLIP | |||
| DTW | 8.6 | 21.0 | 31.2 |
| OTAM | 8.1 | 22.1 | 31.7 |
| DTW + Cap. Avg. | 9.0 | 22.6 | 32.4 |
| OTAM + Cap. Avg. | 8.3 | 22.6 | 32.6 |
| Cap. Avg. | 7.1 | 21.0 | 31.9 |
| TempCLR | |||
| DTW | 9.0 | 21.4 | 31.0 |
| OTAM | 9.3 | 21.4 | 31.4 |
| DTW + Cap. Avg. | 9.0 | 21.7 | 31.2 |
| OTAM + Cap. Avg. | 9.5 | 21.7 | 31.4 |
| Cap. Avg. | 8.1 | 21.7 | 32.8 |
| \hlineB3 | |||
A.4.3 Full-Video retrieval
As shown in Table 7, we comprehensively study the performance of our approach under different metrics. Again, as VideoCLIP is not trained to explore the global temporal context, there is a large performance drop when DTW or OTAM is used to measure the distance. For video retrieval where the background is removed, the number of features in the paragraph part and the video part are the same where the features with the same index should be matched. As DTW has a strong assumption that , such prior constraint can benefit the matching.
However, for our approach TempCLR, when the model has been trained to compare the sequences directly, using either OTAM or DTW and always achieve good performance. In addition, Cap. Avg is unit-level based metric and can serve as a complementary component for video retrieval. As such, DTW/OTAM and can combined with Cap. Avg and the prediction by the combined metric can also achieve very high recall. Nevertheless, we believe the temporal alignment between two sequences still take the dominant role since the performance by the ensembled metric does not provide significant gain over the recall by using DTW/OTAM only.
| \hlineB3 Measure | R@1 | R@5 | R@10 |
|---|---|---|---|
| VideoCLIP | |||
| DTW | 56.0 | 89.9 | 96.3 |
| OTAM | 52.8 | 89.2 | 95.0 |
| DTW + Cap. Avg. | 85.8 | 97.7 | 99.1 |
| Cap. Avg. | 74.5 | 94.1 | 97.9 |
| TempCLR | |||
| DTW | 83.5 | 97.2 | 99.3 |
| OTAM | 84.9 | 97.9 | 99.3 |
| DTW + Cap. Avg. | 86.5 | 97.2 | 99.3 |
| Cap. Avg. | 74.5 | 94.6 | 97.0 |
| \hlineB3 | |||
Then, the performance of full-video retrieval (background kept) is summarized in Table. 8. As VideoCLIP has been well-trained on the full HowTo100M dataset and compare clip-caption pairs across videos, VideoCLIP can thus discriminate clips of background and can maintain high performance (i.e., 73.6) with Cap. Avg. as the measure. However, as the clips of background accounts for most part of the video and VideoCLIP is not trained to model the temporal context, the performance drop clearly when DTW or OTAM is used as measure. Furthermore, when we ensemble the DTW-related measure with Cap. Avg., the performance improvement is thus limited (i.e., from 73.6 to 74.8 by OTAM and 73.8 by DTW).
However, when we train the TempCLR on a very small dataset, the model can then capture the temporal context information effectively. We note that DTW has strong boundary assumption and thus the performance is limited. However, OTAM can avoid the assumption and can then improve R@1 of TempCLR from 70.4 to 72.2. In this way, we believe necessary modification on DTW-related measure can be done to further improve the training efficiency and we leave this for future work. In addition, we can achieve higher performance when the measures are combined. For example, by combining OTAM and Cap. Avg., the performance can be improved to 77.5, which further demonstrates that purely using Cap. Avg. as measure is not enough and it is necessary to explore the temporal context in feature embedding.
| \hlineB3 Measure | R@1 | R@5 | R@10 |
|---|---|---|---|
| VideoCLIP | |||
| DTW | 55.7 | 93.1 | 98.9 |
| OTAM | 56.6 | 92.8 | 98.9 |
| DTW + Cap. Avg. | 73.8 | 95.4 | 98.6 |
| OTAM + Cap. Avg. | 74.5 | 95.1 | 99.1 |
| Cap. Avg. | 73.6 | 94.7 | 98.4 |
| TempCLR | |||
| DTW | 70.4 | 93.8 | 97.9 |
| OTAM | 72.2 | 94.5 | 97.7 |
| DTW + Cap. Avg. | 76.7 | 95.6 | 98.4 |
| OTAM + Cap. Avg. | 77.5 | 95.6 | 98.6 |
| Cap. Avg. | 71.7 | 94.5 | 97.9 |
| \hlineB3 | |||
A.4.4 Action step localization
As VideoCLIP employs a Transformer architecture, we also study two different training strategies, i.e., updating all parameters and updating the layer norms only.
(Zero-Shot) The results in Table A.4.4 (Left) study the performance by training on HW100M using either OTAM or DTW as to measure sequence distance in TempCLR. It is observed that finetuning all parameters can improve the zero-shot adaptation performance most and using either OTAM or DTW achieves similar performance. However, if only the norm layer is updated, the trianing efficiency by using OTAM as sequence distance measurement can be slightly less effective.
(Supervised) For the finetuning on CrossTask, we always update the whole network for fair comparison. However, the pre-trained model by our TempCLR is obtained by updating either all parameters or norm layer only during the pre-traning stage. The two pre-trained models uses DTW as measurement in . In the Table A.4.4 (Right), each column indicates how the finetuning loss is set where w/o indicates the vanilla contrastive-learning based approach between captions and clips which does not consider the global temporal context.
Then, we can find that 1) using DTW during finetuning is better than using OTAM and 2) updating the layer norm only can stably improve the performance with small variance. When DTW is used and all parameters are finetuned, the model can be well-learned during the pre-training stage and thus achieves good performance in the Supervised setup.
| \hlineB3 (Zero-Shot) | OTAM | DTW |
|---|---|---|
| TempCLR + All Params. | 36.9 | 36.9 |
| TempCLR + Norm Only | 36.1 | 36.8 |
| \hlineB3 The performance of VideoCLIP is 33.9 | ||
| \hlineB3 (Supervised) | w/o | OTAM | DTW |
|---|---|---|---|
| VideoCLIP | 47.3 | 51.7 | 52.5 |
| TempCLR + All Params. | 49.3 | 50 | 52.3 |
| TempCLR + Norm Only | 49.0 | 51.1 | 51.6 |
| \hlineB3 |
Then, we provide the full table of Zero-Shot in Table 10. As mentioned in the main paper, VideoCLIP (Xu et al., 2021) does not provide clear performance gain over HT100M and under-performs many other SOTA approach in zero-shot evaluation. Since we only have 90k training data and is trained from VideoCLIP, the model by our approach is hard to be well-learned for the zero-shot localization evaluation. However, our approach can still achieve 9% gain and improve the recall from 33.9 to 36.9. Nevertheless, as summarized in Table 11, by finetuning from 50 to 100 training data on CrossTask, we can effectively improve the performance.
| \hlineB3 Approach (Zero-Shot) | Backbone | Recall |
|---|---|---|
| HT100M (Miech et al., 2019) | R152 + RX101 | 33.6 |
| MIL-NCE (Miech et al., 2020) | S3D-G | 40.5 |
| MIL-NCE (Miech et al., 2020) | I3D-G | 36.4 |
| ActBERT (Zhu & Yang, 2020) | R101 + Res3D | 37.1 |
| ActBERT (Zhu & Yang, 2020) | + Faster-RCNN | 41.4 |
| UniVL (Luo et al., 2020) | S3D-G | 42.0 |
| MCN (Chen et al., 2021) | R152 + RX101 | 35.1 |
| MMFT (Shvetsova et al., 2022) | R152 + RX101 | 39.3 |
| MMFT (Shvetsova et al., 2022) | S3D-G | 41.1 |
| VideoCLIP (Xu et al., 2021) | S3D-G | 33.9 |
| TempCLR (Ours) | S3D-G | 36.9 () |
| \hlineB3 |
| \hlineB3 Approach | 50(10%) | 100(20%) |
|---|---|---|
| VideoCLIP (Xu et al., 2021) | 40.1 | 41.1 |
| TempCLR (Ours) | 40.2 | 42.8 |
| \hlineB3 |
A.4.5 Discussion on Negative Size
As summarized in Table 12, we adjust the size of negative samples from 16 to 64 and use the zero-shot performance on action step localization and full-video retrieval for comparison. We use Recall (%) as metric for action step localization and R@1 (%) for full-video retrieval evaluation. By increasing the negative size from 16 to 32, we can see the performance can be improved slightly. However, when we keep increasing the size to 64, there is no significant gain. To note, during pre-training, as we directly use the data sampling strategy in VideoCLIP, the number of segments existing in each video is only 6 on average. To reach reasonably high performance but still train the network efficiently, we set the size of negative samples as 32.
| \hlineB3 Task Negative Size | 16 | 32 | 64 |
|---|---|---|---|
| action step localization (Recall) | 36.5 | 36.9 | 37.1 |
| full-video retrieval (R@1) | 82.9 | 83.5 | 83.5 |
| \hlineB3 |
A.4.6 Discussion on Unit Matching in Sequence Alignment
From the results in Table 7 and Table LABEL:tab:ablation(a), video clips relies mainly replies on the unit-level comparison for video retrieval (hige recall by Cap. Avg.). Even though the percentage of corrected matched caption-clips between the paragraph and video in the pair reaches 80%, the recall is still low when DTW/OTAM is used. This is because the set of sentences features can also have high alignment score with (i.e., distracted by) clip features from other videos, which further demonstrate that the success of VideoCLIP is mainly based on unit-level comparison. However, our approach TempCLR improves both recall and the percentage of correctly matched caption-clip pairs, which indicates that the model has indeed been trained to model the global temporal correlation.
A.5 Comparison of Optimization Gradient between TempCLR and VideoCLIP
In this section, to explain the difference of training objective in VideoCLIP and TempCLR, we compare the gradient by obtained by different training strategies, temporally overlapped strategy by VideoCLIP (Xu et al., 2021) and the DTW-based sequence-level comparison by TempCLR. We take a toy example where two sequences and should be aligned and the ground-truth of matched pairs are and . Without loss of generality, we set as anchor and as query. Then, the training losses are,
(for VideoCLIP)
where and are the losses of positive pairs for anchor and in respectively,
and (for TempCLR)
where is the loss for .
Then, we take the positive pair as one example and derive the gradients w.r.t. ,
(For VideoCLIP)
and (For TempCLR)
which can be further simplified as
As such, for our TempCLR, we can observe that the optimization of the positive pair clearly considers the difference when is matched with each element in , i.e., . In other words, the optimization of also depends on the correlation between and , which is the temporal context.
We then take as one example and compare the optimization of negative pairs. (For VideoCLIP)
and (For TempCLR)
Similarly, we can also observe that optimization of negative pairs only considers unit-level comparison and in VideoCLIP while ours also takes temporal context, i.e., the matching difference into consideration.
A.6 More Visualization & Figure Explanation
We first provide the full version of visualization shown in Fig. LABEL:fig:visualization-main in Fig. 3. Then, we provide three more visualization results in Fig. 4 & 5 & 6. The visualization demonstrates that our approach is capable to correctly match the clip-caption pairs with high confidence and also achieve sequence alignment for full-video retrieval.
Meanwhile, in our Concept Figure 1, as a comparison between sequence-level distance and unit-level distance, (b) has similar color pattern to (a) since the color of chicken is dark, which results in difficult and potential mismatching under unit-level comparison.




Then, we examine the robustness of our TempCLR towards scene change. As shown in Fig. 7, we consider the case where the change of scene/context does not break the temporal succession. Given a full video which consists of 10 captions and each caption is paired with a segment in the full video. Then, we replace the video segment corresponding to the second step “add oil to the wok” as a segment which is also describing “add oil to the wok” but from another video. As we feed the whole video into the network jointly, the interaction between the clips of the replaced segment with others may adjust the extracted features, comparing with Fig. 3, the similarity between the captions and the original video clips are changed slightly. However, with DTW as measure, as the steps in the videos are still successive, we can still align the captions with videos correctly.
Next, we examine the robustness towards background (i.e., clips without clear semantic meaning), as shown in Fig. 8, as inject a segment of background between the 4th and 5th steps in the original video. Then, as the features of all captions are distant from the background, it does not impact the optimal alignment derived in DTW. As such, our TempCLR is still robust to the background.