Stochastic Thermodynamics of Brownian motion in Temperature Gradient
Abstract
We study stochastic thermodynamics of a Brownian particle which is subjected to a temperature gradient and is confined by an external potential. We first formulate an over-damped Ito-Langevin theory in terms of local temperature, friction coefficient, and steady state distribution, all of which are experimentally measurable. We then study the associated stochastic thermodynamics theory. We analyze the excess entropy production (EP) both at trajectory level and at ensemble level, and derive the Clausius inequality as well as the transient fluctuation theorem (FT). We also use molecular dynamics to simulate a Brownian particle inside a Lennard-Jones fluid and verify the FT. Remarkably we find that the FT remains valid even in the under-damped regime. We explain the possible mechanism underlying this surprising result.
I Introduction
After several decades of hard work, two types of Fluctuation theorems (FTs) [1, 4, 3, 5, 2, 6] have been firmly established. Firstly the steady state FT (SSFT) characterizes the large deviation behaviors [4, 8, 7, 1] of entropy production (EP) rate in non-equilibrium steady states. Secondly, various transient FTs [3, 2, 5] characterize the fluctuations of dissipated work in non-equilibrium processes starting from equilibrium states. These results constitute the backbone of an emerging field called stochastic thermodynamics [5, 9, 10], which provides a unified view of non-equilibrium fluctuations.
Many physical systems and most biological systems are however embedded in dissipative backgrounds and undergo non-stationary processes. They therefore do not fall into either of above mentioned two categories. Remarkably, a series of seminal theoretical works [11, 12, 13, 14, 15, 16, 17] indicate that in Markov processes with even variables, the total EP may be broken into two parts, each satisfying a separate FT. For Langevin systems, it may be understood that these two parts of EP are due to respectively the dissipative work of the conservative and non-conservative components of forces [21]. This decomposition of EP is also intimately related to the Glansdorff-Prigogine stability theory of non-equilibrium steady states [20, 18, 19, 21], as well as the steady-state thermodynamics of Sasa and Tasaki [22, 21]. Following these earlier literatures, it is therefore natural to call them respectively the excess EP and the house-keeping EP 111They are called respectively the non-adiabatic EP and adiabatic EP by Esposito and Van den Broeck [14, 15, 16].. We note that except for a few partial results [23, 24], there has been no systematic verification of these theories, either experimentally or numerically.
Brownian motion in a temperature gradient constitutes one of the simplest systems embedded in dissipative backgrounds. In the absence of external force, a particle immersed in a temperature exhibits directed motion, an effect known as Ludwig-Soret effect [25, 26, 27], or thermophoresis [29, 30, 28], which has many important applications and has been studied in various situations [32, 33, 34, 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 45, 46, 31]. Regardless of significant recent progresses [47, 48, 49], the statistical mechanism of thermophoresis is not yet fully understood [29, 50]. The stochastic thermodynamics of Brownian motion in temperature gradient has also attracted some recent interests [51, 52, 53, 54]. Due to the difficulties associated with the multiplicative nature of noises, however, a systematic and consistent theory however has yet to be developed. In particular there has been no derivation or verification of fluctuation theorems for Brownian motion in temperature gradient.
In the present work, we shall develop a systematic theory of stochastic thermodynamics for this system, and make contact with thermodynamics of thermophoresis [28, 29]. In Sec. II, we shall model the over-damped Brownian dynamics using covariant Langevin equation, whose general theory was developed in Ref. [55]. Unlike the previous studies [51, 52, 53, 54], our Langevin equation is fully characterized by steady-state distribution and the position dependent temperature/friction coefficient, all of which are experimentally measurable. Regardless of the non-equilibrium nature of the background fluid, however, the Langevin equation obeys the conditions of detailed balance. In Sec. III, we proceed to construct a stochastic thermodynamic theory using the over-damped Langevin equation. Because the background does not have a fixed temperature, however, the conventional formulation of stochastic thermodynamics in terms of heat and work is not applicable. We therefore forego the concepts of work/heat and deal with EP directly. Also the background fluid is in a non-equilibrium steady state which constantly dissipates energy. This dissipation is completely invisible in our theory. Hence the EP captured by our theory is not the full EP, but only the excess EP. We study this excess EP both at the trajectory level and at the ensemble level, and prove rigorously the Clausius inequality as well as the transient FT obeyed by this quantity. In the limit of vanishing temperature gradient, our theory reduces to the usual theory of stochastic thermodynamics. Our theory can be understood as a simple showcase of the general theory which we developed in Ref. [21]. In Sec. IV, we verify our theory by simulating a Brownian particle immersed in a Lennard-Jones fluid subjected to a temperature gradient. We compute the position-dependent temperature and friction coefficient, as well as the generalized potential using the simulation data. Using these results, we explicitly verify the validity of the FT for the excess EP. Remarkably, the FT remains valid not only in the over-damped regime, but also deep in the under-damped regime. We briefly explain this surprising result. Finally in Sec. V we summarize our result and project future directions.
II Langevin dynamics
As discussed in the Introduction, we start directly with the over-damped limit. Let be the position vector of the Brownian particle, respectively the position-dependent temperature and friction coefficient. We assume that the Brownian particle is coupled to a confining potential, so that its steady state probability density function (pdf) is normalizable. Defining the generalized potential via
| (1) |
the over-damped Langevin equation is given by
| (2) |
where is i-th Cartesian component of , , whilst are the standard Wiener noises satisfying
| (3a) | |||||
| (3b) | |||||
The ratio can be understood as the position-dependent diffusion constant. The product in the r.h.s. of Eq. (2) is defined in Ito’s sense. Letting be the pdf of , using the standard methods of stochastic analysis [56], one can show that the Langevin equation (2) is mathematically equivalent to the following Fokker-Planck equation (FPE):
| (4) |
Note that repeated indices are summed over. In this work we do not distinguish superscripts from subscripts. This does not lead to any ambiguity, because we will not carry out any nonlinear coordinate transformation. It is easily seen that Eq. (1) is indeed the steady state solution of Eq. (4). Note that the FPE (4) can also be written as
| (5) |
where is the probability current:
| (6) |
which vanishes identically in the steady state Eq. (1).
The Langevin equation (2) and the Fokker-Planck equation (4) are in the covariant form as studied in Ref. [55], with a diagonal but position dependent kinetic matrix . The term in the r.h.s. of Eq. (2) is called the spurious drift [55], which is necessary to guarantee that Eqs. (2) and (4) are mathematically equivalent.
Since the position variable is even under time reversal, Eq. (2) also satisfies conditions of detailed balance, which are given in Eqs. (3.16) of Ref. [55], or Eqs. (2.31) of Ref. [57]. This guarantees that two-time pdf satisfies the following symmetry:
where are two distinct position vectors.
The generalized potential , whose concrete form is irrelevant at this stage, depends both on the external confining potential and on the temperature gradient. In the absence of external confining potential, the Brownian particle exhibits thermophoresis, i.e., it moves with a constant average speed, parallel or anti-parallel to the temperature gradient. This implies that has a term approximately linear in temperature , which will be verified using simulation data in Sec. IV.3. Additionally, as usual in the study of stochastic thermodynamics, the external confining potential is externally tuned by certain control parameters. These parameters are defined and discussed in detail in Sec. IV. As a consequence, we should write the generalized potential as , and the external confining potential as , where denote the control parameters. To avoid clutter, however, we often hide the dependence of and on and .
III Stochastic thermodynamics
In Ref. [57] we constructed a theory of stochastic thermodynamics for covariant nonlinear Langevin systems satisfying detailed balance [55], under the assumption that the system is in contact with a heat bath with a fixed temperature. The quantity that plays a crucial role in this theory is Hamiltonian of mean force (HMF) , which is related to the equilibrium pdf via:
| (7) |
where is the generalized potential, and is the equilibrium free energy defined as
| (8) |
Note that we use to denote volume integral over . As one can see from Eq. (7), both and are defined only up to an additive constant, which may depend on . This uncertainty arises because the microscopic Hamiltonian is defined only up to an additive constant. We then defined [57] as the fluctuating internal energy, and defined differential heat and work at the trajectory level as: , where are respectively the differentials due to variations of and of . Entropy production was constructed using these quantities. The first law, the second law, as well as various FTs were then established.
The approach pursued in Ref. [57] is however not directly applicable in the present case. We note that, in the presence of temperature gradient, the r.h.s. of Eq. (8) becomes -dependent, whereas the l.h.s. is expected to be -independent. Hence there is no straightforward way to define free energy of a Brownian particle if temperature is position dependent. The same difficulty also shows up when one tries to define HMF, or the differential heat and work.
In view of this difficulty, we shall avoid defining any energy-like quantity, and deal only with entropy-like quantities. This does not prevent us from understanding of the second law of thermodynamics or FTs, since the essence of these results is entropy rather than energy.
As explained in the Introduction, the EPs that we shall study using the Langevin theory (2) is the excess EP which arises due to the insertion of the Brownian particle and variation of external control parameter. The missing entropy product, which may be called the housekeeping EP, is extensive in the size of the fluid and is completely invisible in our theory.
III.1 Excess EP and excess Clausius inequality
As in previous works [55, 57], we introduce the notations for partial differentials:
| (9) | |||||
| (10) |
The full differential of can be decomposed as
| (11) |
It is important to note that should be expanded in terms of up to the second order:
| (12) |
where all partial derivatives are evaluated at . It is well known that in Langevin dynamics with white noises scales with , whereas according to (2), we have . Hence expanding to the order means that we are expanding it to the order , which is necessary in order to obtain a well-defined continuum limit.
We define the excess change of environmental entropy 222As discuss in the Introduction, there is a housekeeping part of the change of the environmental entropy, which cannot be captured by our theory. In an expanded theory which includes both the Brownian particle and the ambient fluid, both parts of entropy change show up explicitly. at the trajectory level:
| (13) |
which depends both on the initial position and the incremental . We may use Eq. (12) to express in terms of , and use the Langevin equation (2) to express it in terms of Wiener noises . Further averaging over the noises using Eqs. (3), and keeping terms up to the order , we obtain
| (14) | |||||
Multiplying both sides by and integrating over , we obtain the excess change of environmental entropy at the ensemble level:
| (15) |
Integrating by parts once, we transform Eq. (15) into:
| (16) |
The system entropy is given by the usual Gibbs-Shannon expression:
| (17) |
Its differential is given by
| (18) | |||||
| (19) |
where in the second equality, we have used Eq. (4), whilst in the last equality, we have integrated by parts once.
The excess EP 333This is called the non-adiabatic EP by Esposito and van der Broeck. Here we follow the terminology of Glansdorff and Prigogine. at ensemble level is defined as the sum of Eqs. (16) and (19), which is easily seen to be non-negative:
| (20) | |||||
This inequality may be called the excess Clausius inequality.
We may also define a dimensionless functional
| (21) | |||||
which is the relative entropy between the pdf and the steady state pdf. Being non-negative and minimized at the steady state, is in fact the Lyapunov functional of the Fokker-Planck dynamics. Furthermore, for fixed control parameter, it is easy to see that the rate of is precisely negative the rate of excess EP:
| (22) |
III.2 Limit of vanishing temperature gradient
For the special case of vanishing temperature gradient, both and are fixed constants. We will show that the theory developed above restores to the well known theory of stochastic thermodynamics for Brownian motion in an equilibrium fluid. For simplicity we assume that the interaction between the Brownian particle and the fluid has no effect on the equilibrium pdf.
Firstly, in the absence of temperature gradient, the equilibrium pdf is:
| (23) |
where is the equilibrium free energy. Comparing this with Eq. (1), we see that
| (24) |
Using this to replace in terms of , we find that the Langevin equation (2) reduces to the familiar form of over-damped dynamics of a Brownian particle coupled to a single heat bath with temperature :
| (25) |
Now following the procedure in Ref. [57], we define as the fluctuating internal energy, and define the differential heat and work at the trajectory level as
| (26) | |||||
| (27) |
Since the fluid is in equilibrium, the entropy change of the fluid is related to the differential heat via
| (28) |
which agrees with Eq. (13). The inequality (20) then reduces to
| (29) |
which is precisely the usual Clausius inequality. Finally the functional defined in Eq. (21) reduces to
| (30) | |||||
where is the non-equilibrium free energy defined as
| (31) |
Hence is the deviation of the non-equilibrium free energy from its equilibrium value.
III.3 Fluctuation Theorem for excess EP
Let be the pdf that the system evolves to state at time , given that it is in state at time 444We note that both and are infinitesimal quantities.. is then the pdf of the backward process . Invoking Eq. (A27) of Ref. [57] we obtain 555note that in the present case both and the control parameter are even under time-reversal, hence . :
| (32a) | |||
| which, in view of Eq. (13), may be rewritten into | |||
| (32b) | |||
This establishes the connection between the Langevin dynamics and thermodynamics. We shall call Eqs. (32a) and (32b) the condition of local detailed balance. Provided that the steady state (1) exists, Eq. (32a) is in fact equivalent to the condition of detailed balance:
| (33) |
We define the forward process with a dynamic protocol , where the system starts from the steady state corresponding to the initial parameter :
| (34a) | |||
| The backward process is defined by the protocol , where the system starts from the steady state corresponding to the initial parameter : | |||
| (34b) | |||
In both the forward and backward processes, the temperature gradient remains fixed.
Now consider a forward trajectory , with initial state . To simplify notations, we shall use (bold phase) to denote the forward trajectory, which should be carefully distinguished from the friction coefficient . The corresponding backward trajectory is defined as . The initial state of the backward trajectory is identical to the final state of the forward trajectory and vice versa. We can break both the forward and backward trajectories into a large number of small segments, and apply Eqs. (32) to each pair of segments. Adding up all these results, we obtain
| (35) |
For a careful derivation of this result, see Ref. [57]. The r.h.s. of the equation is the excess change of environmental entropy along the entire forward trajectory in the forward process. In the l.h.s., and are the pdfs of forward and backward trajectories conditioned on their initial states.
The backward of the backward process is the forward process, whilst the backward of the backward trajectory is the forward trajectory. Hence analogous to Eq. (35), we also have
| (36) |
Equation (36) is the opposite of Eq. (35), hence we find
| (37) |
Using the initial state pdfs (34), the unconditional pdfs of the forward and backward trajectories can be found:
| (38a) | |||||
| (38b) | |||||
Taking the ratio, and using Eq. (35), we obtain
| (39) |
Whilst the last term in the r.h.s. is the excess change of environmental entropy along the forward trajectory of the forward process, the first two terms in the r.h.s. may be understood as the change of stochastic entropy [63] of the system along the forward trajectory of the forward process. Combining these two contributions, we define the r.h.s. of Eq. (39) as the excess EP along the forward trajectory of the forward process, denoted as . It immediately follows that the excess EP along the backward trajectory of the backward process is the negative of Eq. (39), i.e. .
Since the difference can be written as the integral , which can be further written as up on invoking Eq. (11), we may also write Eq. (39) as:
| (40) |
which may be called the detailed FT for the excess EP.
The pdfs of excess EP of the forward and backward processes are respectively:
| (41a) | |||
| (41b) | |||
The functional integrals over trajectories should be calculated using time-slicing, much similar to the Feynman path integral in quantum mechanics. Using Eq. (40), we can then show
| (42) | |||||
Hence we arrive at
| (43) |
which is called the transient FT for the excess EP.
IV Numerical simulation
In this section, we simulate a Brownian particle in a temperature gradient, and verify that the dynamics of the Brownian particle is indeed described by the over-damped Langevin equation (2), with appropriate choices of system parameters. We will numerically compute the position-dependent temperature and friction coefficient , as well as the generalized potential . Using these results, we explicitly verify the FT (43), which turns out to hold not only in the over-damped regime, but also in the under-damped regime.
IV.1 Setup of simulation
We simulate a Brownian particle immersed in a 2D Lennard-Jones fluid using LAMMPS package [59] of Molecular Dynamics (MD).
Both the interaction between fluid particles, as well as that between the Brownian particle and fluid particles, are modeled by the 12-6 Lennard-Jones (LJ) pair potential truncated at zero potential. Throughout this section all lengths are in units of the Lennard-Jones diameter , all energies are in units of the well-depth , and the unit of time is , where is the mass of the fluid particles. Boltzmann’s constant is set to unity. The interaction potential between two fluid particles is
| (46) |
The mass of the Brownian particle is set to be . The diameter of the Brownian particle is chosen to be triple that of the fluid particles. Consequently, the interaction potential between the Brownian particle and a fluid particle is
| (47) |
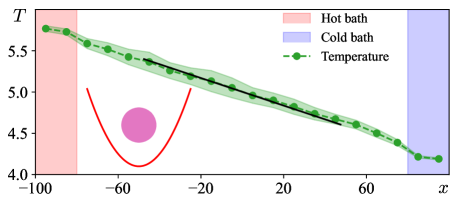
The system consists of fluid particles and a single Brownian particle. All particles are put into a two-dimensional square box with length . The dimensionless density of the fluid is , which corresponds to a gas phase. The NVE ensemble is used to carry out the MD simulation. A temperature gradient is established using the Langevin thermostat method [60], by introducing a hot region with temperature near the left boundary, and a cold region with temperature near the right boundary. We choose the reflection boundary condition at , so that there is no macroscopic transport of fluid particles in the steady state. We choose the periodic boundary condition at . See Fig. 1 for an illustration.
We choose the time step of MD integration as , and start the simulation from a random state. After running steps, a steady temperature gradient is set up.
To calibrate the simulation, we first simulate an equilibrium fluid by choosing , without inserting the Brownian particle. The radial distribution function (RDF) of fluid particles as a function of is shown in Fig. 2 (a). The normalized velocity auto-correlation function (VACF) as a function of is shown in Fig. 2 (b) in log-linear scale. It can be fit well by an exponential:
| (48) |
These results indicate the equilibrium nature of the fluid.
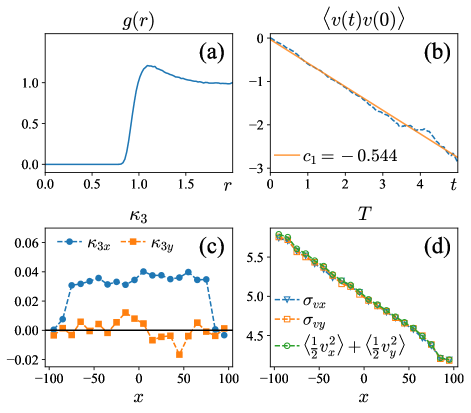
We then introduce the temperature gradient. We cut the system into many slices along the axis, with thickness , both of which are longer than the mean free path of fluid particles. Within each slice, the velocity distribution of fluid particles is approximately Gaussian. Deviations from Gaussian may be characterized by the normalized third-order cumulants:
| (49) | |||||
| (50) |
These cumulants are computed in each slice and shown in Fig. 2 (c). As one can see there, fluctuates around zero, whereas exhibits systematic deviation from zero by a few percent. The latter is evidently related to the heat transport along direction in the steady state. Hence the pdf of is Gaussian, whereas the pdf of exhibits a small yet systematic deviation from Gaussian.
We compute the temperature of each slice using three different methods: (1) average kinetic energy , (2) variance of , and (3) variance of . As shown in Fig.2 (d), all three methods are consistent with a constant temperature temperature. The best fit of the temperature profile is
| (51) |
IV.2 Velocity distribution of the Brownian particle
A Brownian particle is inserted, which also couples to an anisotropic harmonic potential:
| (52) |
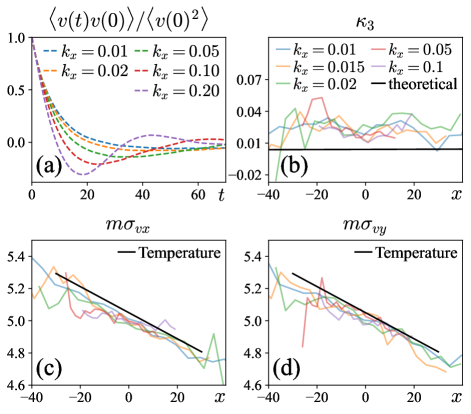
First we set , and compute the VACF of Brownian particle in direction, for different values of . As shown in Fig. 3 (a), for , the VACF decays in an oscillatory fashion, which means that the system is in the under-damped regime. By contrast for , the VACF decays without oscillation, which means that the system is in the over-damped regime. Hence we expect that for , the Brownian dynamics is adequately described by the over-damped Langevin equation (2), whereas for , the dynamics should be described by under-damped Langevin equation.
Next we compute the velocity pdf of the Brownian particle in each -slice. Similar to the fluid particles, the normalized third order cumulant of the Brownian particle also deviate slightly but systematically from zero, as shown in Fig. 3(b). Furthermore, seems independent of confining potential and of the slice, and is also systematically different from the prediction of Ref. [51].
We also plot the variances of velocity components of the Brownian particle as a function of . As shown in Fig. 3(c) and (d), the results are consistent with the temperature profile Eq. (51), which is computed using the velocity distributions of the fluid particles. This verifies that the Brownian particle establishes local thermal equilibrium with the fluid within each slice.
IV.3 Position distribution of the Brownian particle
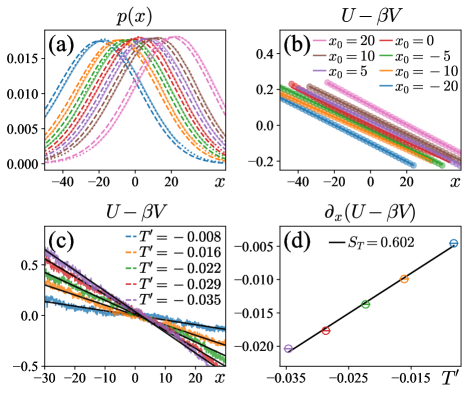
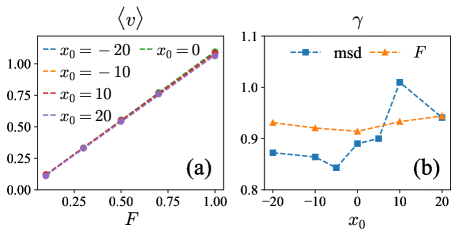
We compute the steady state position pdf of Brownian particle, and use it to obtain the generalized potential via Eq. (1). The results are shown as dotted lines in Fig. 4(a) for different values of . Also shown there are (dashed lines, normalized properly), which appear always to the left of the steady state pdf. This indicates that the thermophoresis drives Brownian particle to the right (with lower temperature).
We fit the steady state position distribution by , where is given by
| (53) |
with as given by Eq. (51), is the fitting parameter, whilst is a normalization constant. As shown by solid lines in Fig. 4(a), the fitting quality is remarkably good.
In Fig. 4(b) we plot as a function of , for fixed but different values of . The slope of these straight-lines, which can be understood as the effective thermophoresis force, renormalized by the local temperature , are approximately independent of . This again verifies the validity of Eq. (53).
IV.4 Soret coefficient
Let us now establish the connection between our theory and the thermodynamic theory of thermophoresis [29]. In the latter theory, there is no external potential, the probability current of the Brownian particle is [29]
| (54) |
where is the Soret coefficient, whilst is the diffusion constant. In general, both and depend on position. However, in the thermodynamic theory of thermophoresis, it is always assumed that the overall variation temperature is small, so that and may be treated as constants.
In our theory, the probability current is given by Eq. (6), where is given by Eq. (53). In the absence of external potential, Eq. (6) reduces to
| (55) |
This is precisely Eq. (54) with a position-dependent diffusion constant . Hence the parameter in Eq. (53) is precisely the Soret coefficient.
In Fig. 4 (c) we fix , and use simulation data to plot against for different values of temperature gradient. In Fig. 4 (d) we plot the slope of linear fitting in Fig. 4 (c) against temperature gradient. This clearly demonstrates that the Soret coefficient is approximately constant within the region of simulation. Indeed, in the region of simulation, the overall variation of temperature is less than 8%, hence can be treated approximately as a constant.
IV.5 Friction coefficient
We use two different methods to compute the friction coefficient as a function of . In the first method, we apply a constant force along direction, and compute the friction coefficient via:
| (56) |
where is the minimum of the potential Eq. (52). In Fig. 5 (a) the relation between and is shown for different , from which we deduce that the dependence of on is very weak. The computed friction coefficient is shown as orange symbols in Fig. 5 (b).
In the second method, we set , so that the Brownian particle diffuses freely along direction, whilst it is confined along direction. Provided that the Langevin equation (2) is applicable, the mean square displacement (MSD) is given by
| (57) |
where is given by the linear fit Eq. (51). Using Eq. (57) to fit simulation data, we obtain the friction coefficient shown as blue symbols in Fig. 5 (b).
It can be seen from Fig. 5 (b) that whilst two methods are yield generally consistent results, the result of the second method exhibit much larger fluctuations. According to the first method, the friction coefficient is approximately independent of the position along direction. This is rather expected, since variation of temperature in the simulation region is only a few percent.
IV.6 Verification of FT
We simulate three types of forward processes as well as the corresponding backward processes. In all simulations we fix , so that the Brownian particle is localized in direction. In the first protocol, we fix and vary the equilibrium position during the process. In the second protocol, we fix and vary . In the third protocol we vary simultaneously. , or , or both, therefore, are the control parameter we discussed in Sec. II. The details of these protocols are explained in the captions of Fig. 6.
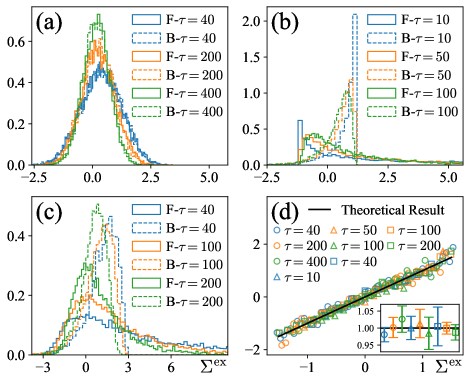
For each process, we sample a large number of trajectories. For each trajectory, we calculate the excess EP using Eq. (40). More specifically, we discretize each trajectory and approximate the excess EP by:
| (58) |
where is given by Eq. (53). The pdfs of in the forward process are then obtained using histograms. The pdfs of in the backward process are obtained using similar methods. The results are shown in Fig. 6(a), (b), (c), respectively, for three processes. In Fig. 6(d), the log ratio is plotted against for all three processes. As shown there, all data collapse to the straight-line with unit slope, as predicted by the excess FT Eq. (43).
As explained in the captions of Fig. 6 and Fig. 7, in the second and third protocols, the spring constant is tuned from to . According to the results demonstrated in Fig. 3 (c), for , the Brownian dynamics is under-damped, and hence the over-damped Langevin equation (2) is not applicable. Nonetheless, the excess FT seems hold to high precision in these two processes, as can be seen from Fig. 6(d). It then seems that the excess FT Eq. (43) is valid even in the under-damped regime. To test this hypothesis, we also simulate two other protocols where the system is deep in the under-damped regime in the entire process. As shown in Fig. 7, indeed the excess FT (43) remains valid as well.
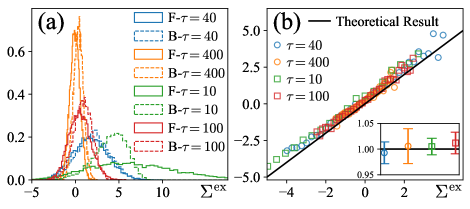
The validity of the excess FT in the under-damped regime may be understood using the stochastic thermodynamic theory developed in Ref. [21], together with two reasonable assumptions. The Brownian dynamics can be described by certain under-damped Langevin equation. Even though we do not know the concrete form of this equation, we do expect that it obeys local detailed balance. The stochastic thermodynamic theory developed in Ref. [21] is then applicable. (Unlike the over-damped theory as studied in the present work, in the under-damped theory, the house-keeping EP is generically non-vanishing. This point is however irrelevant, since we are only interested in the excess EP. ) The excess EP in the underdamped theory is defined as
| (59) |
where is the momentum of the Brownian particle and is the generalized potential of the under-damped theory. Here the subscript ud denotes “under-damped”. In fact is precisely the functional defined in Eq. (4.62) of Ref. [21]), which is also shown there to obey the fluctuation theorem (c.f. Eq. (4.63) of Ref. [21]):
| (60) |
We can decompose the generalized potential into the following form:
| (61) |
such that the conditional steady-state distribution of given and is given by
| (62) |
It then follows that the marginal steady-state pdf of is related to via
| (63) |
Hence is precisely the generalized potential appearing in our over-damped theory.
Now, all results shown in Fig. 3 indicate that the velocity pdfs of the Brownian particle, conditioned on position variable, is independent of the control parameters , i.e. . From Eq. (61) we then deduce
| (64) |
Substituting this back into Eq. (59) we find:
| (65) |
In other words, the excess EP in the under-damped theory is identical to that in the over-damped theory, provided that (i) the under-damped Langevin theory obeys local detailed balance, and (ii) the velocity distribution of the Brownian particle is independent of the control parameter . This explains why the excess FT (43) also holds in the under-damped regime.
V Conclusion and discussion
In this work, we developed a full theory of stochastic thermodynamics for Brownian motion inside a temperature gradient, and supply systematic numerical verification of the theory. The present work consists a first concrete example of the general theoretical framework developed in a sequel of recent papers [55, 57, 58, 21]. The problem of Brownian motion in temperature gradient has two distinct features: (i) the system is embedded in a dissipative background, and (ii) the system is coupled to multiplicative noises. Whilst there have been numerous previous works on this problem, to the best of our knowledge, our work is the first to supply a relatively complete and self-consistent theory of stochastic thermodynamics for this system.
The over-damped theory of Brownian motion in temperature is simple, because it obeys the conditions of detailed balance, so that the house-keeping entropy production vanishes identically. Also because both the variables and the control parameters are even under time-reversal, there is no entropy pumping [21]. In the future works, we shall apply the framework developed in Ref. [55, 57, 58, 21] to more complicated systems, such as Brownian dynamics of rigid bodies, of micro-magnetism, and of Brownian particles in gradient flow. We are also interested in stochastic thermodynamics of active matters, which have attracted some recent interests [61, 62].
The authors acknowledge support from Chenxing Post Doctoral Incentive Project, NSFC grant #12375035, and Shanghai Municipal Science and Technology Major Project via grant 2019SHZDZX01.
References
- [1] Gallavotti, Giovanni, and Ezechiel Godert David Cohen. “Dynamical ensembles in nonequilibrium statistical mechanics.” Physical review letters 74.14 (1995): 2694.
- [2] Jarzynski, C. Equalities and inequalities: Irreversibility and the second law of thermodynamics at the nanoscale. Annu. Rev. Condens. Matter Phys., 2(1), 329-351. (2011)
- [3] Crooks, G. E. Entropy production fluctuation theorem and the nonequilibrium work relation for free energy differences. Physical Review E, 60(3), 2721. (1999)
- [4] Searles, D. J. and Evans, D. J. Fluctuation theorem for stochastic systems. Physical Review E, 60(1), 159 (1999)
- [5] Seifert, U. Stochastic thermodynamics, fluctuation theorems and molecular machines. Reports on progress in physics, 75(12), 126001 (2012).
- [6] Ciliberto, Sergio. Experiments in stochastic thermodynamics: Short history and perspectives. Physical Review X 7.2 (2017): 021051.
- [7] Lebowitz, Joel L., and Herbert Spohn. A Gallavotti-Cohen-type symmetry in the large deviation functional for stochastic dynamics. Journal of Statistical Physics 95 (1999): 333-365.
- [8] Van Zon, R., and Cohen, E. G. D. Stationary and transient work-fluctuation theorems for a dragged Brownian particle. Physical Review E, 67(4), 046102. (2003)
- [9] Peliti, Luca, and Simone Pigolotti. Stochastic Thermodynamics: An Introduction. Princeton University Press, 2021.
- [10] Van den Broeck, Christian. “Stochastic thermodynamics: A brief introduction.” Phys. Complex Colloids 184 (2013): 155-193.
- [11] Hatano, T. and Sasa, S. I. Steady-state thermodynamics of Langevin systems. Physical review letters, 86(16), 3463. (2001)
- [12] Speck, Thomas, and Udo Seifert.“Integral fluctuation theorem for the housekeeping heat.” Journal of Physics A: Mathematical and General 38.34 (2005): L581.
- [13] Chernyak, Vladimir Y., Michael Chertkov, and Christopher Jarzynski. “Path-integral analysis of fluctuation theorems for general Langevin processes.” Journal of Statistical Mechanics: Theory and Experiment 2006.08 P08001 (2006).
- [14] Esposito, M. and Van den Broeck, C. Three detailed fluctuation theorems. Physical review letters, 104(9), 090601. (2010)
- [15] Esposito, M. and Van den Broeck, C. Three faces of the second law. I. Master equation formulation. Physical Review E, 82(1), 011143. (2010)
- [16] Van den Broeck, C. and Esposito, M. Three faces of the second law. II. Fokker-Planck formulation. Physical Review E, 82(1), 011144. (2010)
- [17] Ge, Hao, and Hong Qian. “Physical origins of entropy production, free energy dissipation, and their mathematical representations.” Physical Review E 81.5 (2010): 051133.
- [18] Qian, Hong. “Mesoscopic nonequilibrium thermodynamics of single macromolecules and dynamic entropy-energy compensation.” Physical Review E 65.1 (2001): 016102.
- [19] Qian, Hong. “Entropy production and excess entropy in a nonequilibrium steady-state of single macromolecules.” Physical Review E 65.2 (2002): 021111.
- [20] Glansdorff, Paul, and Ilya Prigogine. Thermodynamic theory of structure, stability and fluctuations. J. Willey & Sons, 1971.
- [21] Mingnan Ding, Fei Liu and Xiangjun Xing. “A Unified Theory for Thermodynamics and Stochastic Thermodynamics of Nonlinear Langevin Systems Driven by Non-conservative Forces” Physical Review Research 4.4 (2022): 043125.
- [22] Sasa, Shin-ichi, and Hal Tasaki. “Steady state thermodynamics.” Journal of statistical physics 125.1 (2006): 125-224.
- [23] Trepagnier, E. H., Jarzynski, C., Ritort, F., Crooks, G. E., Bustamante, C. J. and Liphardt, J. Experimental test of Hatano and Sasa’s nonequilibrium steady-state equality. Proceedings of the National Academy of Sciences, 101(42), 15038-15041.(2004)
- [24] Thalheim, Tobias, et al. “Jarzynski Equality for Soret Equilibria–Virtues of Virtual Potentials.” arXiv preprint arXiv:2009.00950 (2020).
- [25] Ludwig C 1859 Sitz. Ber. Akad. Wiss. Wien 20 539.
- [26] Soret C 1879 Arch. Sci. Phys. Nat. 2 48.
- [27] de Groot S R 1945 L’Effet Soret, Diffusion Thermique Dans Les Phasescondensées (Amsterdam: North-Holland).
- [28] De Groot, Sybren Ruurds, and Peter Mazur. Non-equilibrium thermodynamics. Courier Corporation, 2013.
- [29] Piazza, Roberto, and Alberto Parola. “Thermophoresis in colloidal suspensions.” Journal of Physics: Condensed Matter 20.15 (2008): 153102.
- [30] Piazza, Roberto. “Thermophoresis: moving particles with thermal gradients.” Soft Matter 4.9 (2008): 1740-1744.
- [31] Falasco, Gianmaria, et al. Exact symmetries in the velocity fluctuations of a hot Brownian swimmer. Physical Review E 94.3, 030602. (2016)
- [32] Jerabek-Willemsen, Moran, et al. “MicroScale Thermophoresis: Interaction analysis and beyond.” Journal of Molecular Structure 1077 (2014): 101-113.
- [33] Jerabek-Willemsen, Moran, et al. “Molecular interaction studies using microscale thermophoresis.” Assay and drug development technologies 9.4 (2011): 342-353.
- [34] Thamdrup, Lasse H., Niels B. Larsen, and Anders Kristensen. “Light-induced local heating for thermophoretic manipulation of DNA in polymer micro-and nanochannels.” Nano letters 10.3 (2010): 826-832.
- [35] Baaske, Philipp, et al. “Optical thermophoresis for quantifying the buffer dependence of aptamer binding.” Angewandte Chemie International Edition 49.12 (2010): 2238-2241.
- [36] Wen, Y., Liu, Q. and Liu, Y. “Temperature gradient-driven motion and assembly of two-dimensional (2D) materials on the liquid surface: a theoretical framework and molecular dynamics simulation. ” Physical Chemistry Chemical Physics, 22(41), 24097-24108.(2020)
- [37] Becton, M. and Wang, X. Thermal gradients on graphene to drive nanoflake motion. Journal of chemical theory and computation, 10(2), 722-730. (2014)
- [38] Dehbi, A. A stochastic Langevin model of turbulent particle dispersion in the presence of thermophoresis. International Journal of Multiphase Flow, 35(3), 219-226.(2009)
- [39] Pakravan, H. A. and Yaghoubi, M. Combined thermophoresis, Brownian motion and Dufour effects on natural convection of nanofluids. International Journal of Thermal Sciences, 50(3), 394-402.(2011)
- [40] Helden, L., Eichhorn, R. and Bechinger, C. Direct measurement of thermophoretic forces. Soft matter, 11(12), 2379-2386. (2015)
- [41] Braibanti, M., Vigolo, D. and Piazza, R. Does thermophoretic mobility depend on particle size? Physical review letters, 100(10), 108303.(2008)
- [42] Rurali, R. and Hernandez, E. R. Thermally induced directed motion of fullerene clusters encapsulated in carbon nanotubes. Chemical Physics Letters, 497(1-3), 62-65. (2010)
- [43] Schoen, P. A., Walther, J. H., Poulikakos, D. and Koumoutsakos, P. Phonon assisted thermophoretic motion of gold nanoparticles inside carbon nanotubes. Applied Physics Letters, 90(25), 253116. (2007)
- [44] Duhr, S. and Braun, D. Thermophoretic depletion follows Boltzmann distribution. Physical review letters, 96(16), 168301. (2006)
- [45] Duhr, S. and Braun, D. Why molecules move along a temperature gradient. Proceedings of the National Academy of Sciences, 103(52), 19678-19682. (2006)
- [46] Kroy, Klaus, Dipanjan Chakraborty, and Frank Cichos. “Hot microswimmers.” The European Physical Journal Special Topics 225 (2016): 2207-2225.
- [47] Würger, A. . Hydrodynamic boundary effects on thermophoresis of confined colloids. Physical review letters, 116(13), 138302. (2016)
- [48] Würger, Alois. Thermal non-equilibrium transport in colloids. Reports on Progress in Physics 73(12), 126601. (2010)
- [49] Burelbach, Jérôme, et al. A unified description of colloidal thermophoresis. The European Physical Journal E 41, 1-12. (2018).
- [50] Falasco, Gianmaria, and Klaus Kroy. Nonisothermal fluctuating hydrodynamics and Brownian motion. Physical Review E 93.3, 032150. (2016)
- [51] Celani, A., Bo, S., Eichhorn, R. and Aurell, E. Anomalous thermodynamics at the microscale. Physical review letters, 109(26), 260603. (2012)
- [52] Marino, Raffaele, Ralf Eichhorn, and Erik Aurell. “Entropy production of a Brownian ellipsoid in the over-damped limit.” Physical Review E 93.1 (2016): 012132.
- [53] Sancho, J. M. Brownian colloids in underdamped and overdamped regimes with nonhomogeneous temperature. Physical Review E, 92(6), 062110. (2015)
- [54] Polettini, M. Diffusion in nonuniform temperature and its geometric analog. Physical Review E, 87(3), 032126. (2013)
- [55] Ding, M., Tu, Z. and Xing, X. Covariant formulation of nonlinear Langevin theory with multiplicative Gaussian white noises. Physical Review Research, 2(3), 033381. (2020).
- [56] Gardiner, Crispin W. Handbook of Stochastic Methods, 3rd ed., Berlin: Springer, 2004.
- [57] Ding, M. and Xing, X. (2022). Covariant nonequilibrium thermodynamics from Ito-Langevin dynamics. Physical Review Research, 4(3), 033247.
- [58] Ding, M., Tu, Z. and Xing, X. Strong coupling thermodynamics and stochastic thermodynamics from the unifying perspective of time-scale separation. Physical Review Research, 4(1), 013015. (2022).
- [59] Plimpton, S. Fast parallel algorithms for short-range molecular dynamics. Journal of computational physics, 117(1), 1-19. (1995).
- [60] Schneider, T. and Stoll, E. Molecular-dynamics study of a three-dimensional one-component model for distortive phase transitions. Physical Review B, 17(3), 1302. (1978)
- [61] Fodor, É., Nardini, C., Cates, M. E., Tailleur, J., Visco, P., & Van Wijland, F., How far from equilibrium is active matter? Physical review letters 117. 3 , 038103. (2016)
- [62] Mandal, Dibyendu, Katherine Klymko, and Michael R. DeWeese. Entropy production and fluctuation theorems for active matter. Physical review letters 119.25, 258001. (2017)
- [63] U. Seifert. Entropy production along a stochastic trajectory and an integral fluctuation theorem. Phys. Rev. Lett., 95(4):040602, 2005.