Singing the Body Electric: The Impact of
Robot Embodiment on User Expectations
Abstract
Users develop mental models of robots to conceptualize what kind of interactions they can have with those robots. The conceptualizations are often formed before interactions with the robot and are based only on observing the robot’s physical design. As a result, understanding conceptualizations formed from physical design is necessary to understand how users intend to interact with the robot. We propose to use multimodal features of robot embodiments to predict what kinds of expectations users will have about a given robot’s social and physical capabilities. We show that using such features provides information about general mental models of the robots that generalize across socially interactive robots. We describe how these models can be incorporated into interaction design and physical design for researchers working with socially interactive robots.
I Introduction
Mental models of interactions with systems, including robots, are instrumental in allowing users to naturally interact with arbitrarily technically complex systems [27]. Human-computer interaction has successfully used the concept of design metaphors to develop visual interfaces and interactions that are easy for users to learn [29, 14, 16, 19].
Understanding how users expect to interact with robots, compared to computers, is especially challenging because robots are physically embodied; they have a wider variety of form factors and interaction affordances than typical computer systems. While these additional modes of communication increase complexity, they additionally contribute to the increased social presence of robots compared to computers [9]. In this work, we propose to leverage information about how a robot is physically embodied to understand how people form mental models of that robot. This work leverages the Metaphors to Understand Functional and Social Anticipated Affordances (MUFaSAA) dataset [11] that contains 165 robot embodiments and their associated ratings of social and functional attributes to understand users’ mental models.
We contribute a set of models that can predict how people expect robots to behave socially and functionally, using image-based and text-based features. We show that using pre-trained image features can perform as well as using a hand-crafted feature set, reducing the labor required to annotate these features. We also provide insights for how this model can be used in robot design and interaction design.
II Background
This section provides a brief overview of the concepts of embodiment in robotics and users’ mental models of robots.
II-A Robot Embodiment
Robots are inherently different from computer-based agents because they are situated in the physical world and have the ability to interact with it, navigate in it, and/or manipulate it. Due to this interactive nature, robots have a stronger social presence and can leverage additional modes of communication inaccessible to other forms of technology, including proxemics, gaze, and gesture [9]. Previous work in both psychology and robotics has shown that people form expectations from initial observations of new technologies even before extensive use [12, 5, 22, 20]. The physical design of the robot, i.e., its embodiment, is a key component of how users form expectations of robots capabilities and possible interactions with those robots. Consequently, for robots to be effective, they must understand the social and functional expectations that users place on them so that they can meet those expectations appropriately. Failing to do so negatively impacts adoption of these systems [7, 8, 20].
While previous works has examined ways to model how features of embodiment affect perceptions of particular axes of robot identity, such as age/gender [24] and anthropomorphism [25]. Our work is the first to show how embodiment dictates both functional and social expectations simultaneously, and that these expectations can be understood from easy-to-generate features in addition to hand-crafted features.
II-B Mental Models and Design Metaphors
Mental models are conceptual frameworks that people automatically develop to understand how they can interact with other agents [18]. Previous work has shown that users with mental models that accurately represent the complex underlying system are more effective at using those systems [17]. Mental models are often based on capabilities robots are expected to perform [27] and are formed before interaction, but are updated as users interact with systems and learn more about how systems work. However, even after interaction users can still form and retain incorrect mental models of robots’ real capabilities. For example, past work has shown that robots using speech are expected to perform better physical manipulation despite the fact that those two capabilities are technically unrelated [7]. Understanding users’ initial mental models is important for calibrating robot capabilities, in order to avoid misleading user expectations.
Design metaphors are often used to set expectations of new technologies; they associate unfamiliar systems with familiar and related concepts to provide a user with schemas to interact with novel systems. For example, in one study, identical chatbots were described with different design metaphors (e.g., “a toddler”, “a trained professional”, “an inexperienced teenager”, etc.), shaping user perceptions of the chatbot’s warmth and competence, thereby affecting both the users’ pre-interaction intention to use the chatbot and their subsequent intention to adopt the chatbot post-interaction despite being the same technical implementation [16]. By studying the metaphors people use to understand robot embodiment, we hope to gain insight into how people expect to interact with a given robot embodiment.
III Methods
Our work leverages the MUFaSAA dataset to predict the psychological constructs that describe the social and functional expectations users place on robots, representing the users’ mental models of the robot. We outline our process for predicting these expectations below.
III-A MUFaSAA Dataset Description
The MUFaSAA dataset is a collection of 165 socially interactive robots [11] that have been developed for research or as consumer products. All robots have a standardized image representation that includes a front and side view with a height reference, a set of hand-coded design features (see [11] for feature descriptions, annotator information, and interrater reliability statistics), and a set of three design metaphors that participants used to describe the robot. Each robot also contains ratings of the three constructs from the validated Robotic Social Attributes scale [6]: Warmth, Competence, and Discomfort, and three constructs from the EmCorp-Scale [13]: Perception and Interpretation, Tactile Interaction, and Nonverbal Communication. The constructs are continuous values between -3 and 3 and represent the average rating of a 7-point Likert scales across approximately 30 participants for each robot. In particular, we focus on these six constructs because they are averaged across several Likert items. The other constructs reported by the dataset are single Likert items, and thus are not necessarily amenable to regression analysis [28].
III-B Creating Features of Robot Embodiment
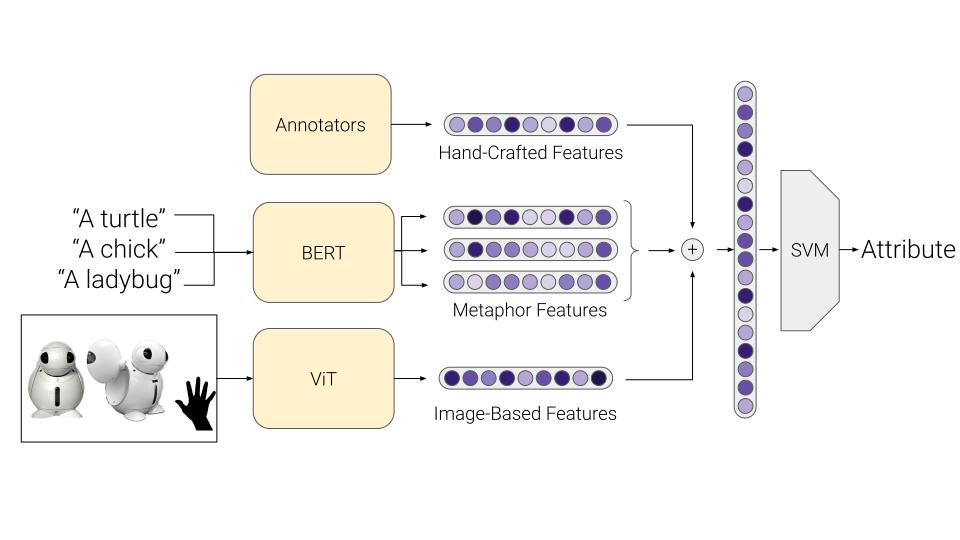
In this work, we generated three modes of features for each of the robots: hand-crafted (HC) features, metaphor (M) features, and image-based (IM), to be used in the learning process shown in Figure 1. Metaphor features and image-based features were deep features that came from large pre-trained models that were available from the transformers library [30]. We describe each feature more next.
III-B1 Hand-Crafted Features
Hand-crafted features came entirely from the pre-collected MUFaSAA dataset. These features were characteristics of the robot embodiment that previous research found to be important for human robot interaction (e.g., height [26], waist-to-hip ratio [2, 3], presence of a mouth [15], etc.) as well as other features that participants used to describe the robots in the dataset. These features were labeled by annotators that had access to images of the robots and other information from websites created by the robots’ manufacturers. The values were all scaled to be between 0 and 1. For each robot, there were 59 HC features.
| Features Used | Warmth | Competence | Discomfort | Perception and Interpretation | Tactile Interaction | Nonverbal Communication |
| HC | 0.145** | 0.130* | 0.306* | 0.188* | 0.381*** | 0.182*** |
| M | 0.209 | 0.163 | 0.401 | 0.262 | 1.390 | 0.387 |
| IM | 0.177 | 0.119** | 0.344 | 0.202* | 0.445*** | 0.190*** |
| HC + M | 0.137** | 0.134* | 0.311* | 0.184* | 0.388*** | 0.182*** |
| HC + IM | 0.138* | 0.122* | 0.303* | 0.182* | 0.337*** | 0.174*** |
| M + IM | 0.183 | 0.122* | 0.355 | 0.216 | 0.466*** | 0.187*** |
| HC + M + IM | 0.135** | 0.124* | 0.307* | 0.182* | 0.349*** | 0.173*** |
| Predict Dataset Average (baseline) | 0.208 | 0.176 | 0.398 | 0.278 | 1.42 | 0.452 |
-
•
All significance values calculated from a t-test with respect to the baseline’s MSE over all folds. * denotes , ** denotes , *** denotes .
III-B2 Metaphor Features
Metaphor features were created from the three metaphors that were most often used to describe each of the robots in the MUFaSAA dataset. These metaphors consisted of either a single noun (e.g., “a dog”, “a kiosk”, etc.) or the name of a specific reference accompanied by context from where the reference is from (e.g., “Rosie the Robot from the Jetsons”, “Eve from WALL-E”, etc.). The metaphors were converted to vectors using a BERT model pre-trained on the Toronto BookCorpus [31] and English Wikipedia datasets. The pre-trained model output a vector in a 512-dimensional space.
III-B3 Image-Based Features
Image-based features were created from the standardized images of the robots in the MUFaSAA dataset. The images were converted to vectors based on a Vision Transformer (ViT) model that was pre-trained on ImageNet-21k [10]. The pre-trained model outputs a 512 dimension vector, which we use as our learned features.
III-C Regression Experiment
We formulated understanding user social and functional expectations as a series of regression problems. We used Support Vector Machines (SVMs) to regress robot features onto each of the six constructs in the RoSAS and EmCorp scales. Experiments were conducted in the scikit-learn framework [23]. We selected SVMs because they are often used for datasets of similar size [21], and empirically performed the best across all constructs compared to all other regression techniques implemented in scikit-learn. Ground-truth labels came from the user-reported values in the MUFaSAA dataset.
III-C1 Model Details
The SVM regressor used radial basis function as a kernel. The regularization hyperparameter, C, and the margin of tolerance hyperparameter, , were selected by performing a grid search over the discrete values [.001, .01, .1, 1, 10, 100] for both hyperparameters. These hyperparameters were evaluated by their average mean squared error loss over all constructs and folds in a 20-fold cross-validation setting. The best-performing values were and .
III-C2 Evaluation
We calculated the average mean squared error (MSE) for each of the six constructs of interest in a 20-fold cross-validation setup, to perform statistical evaluations of our models across folds. We compare our results to the baseline of predicting the average value for the constructs across all robots in the training folds. Statistical analysis is necessary because metrics are noisy on the scale of 165 datapoints, and we seek to verify which combination of modalities performs statistically better than our baseline, which is not captured by point estimates of performance [1]. We performed this evaluation with every combination of the modalities of describing a robot’s embodiment outlined in Section III-B.
IV Preliminary Results
The average MSE across the 20-folds for each method are displayed in Table I and show that we can quantitatively predict ratings of social and functional constructs from features of robot embodiments.
IV-A Single Mode Results
We found significant improvements over the baseline with only one mode of feature being used for the HC and IM features. There were no significant differences between the HC and IM features in regressing on the six constructs. This is of particular interest because it suggests that features used from frozen pre-trained networks can be as effective at predicting social and functional expectations as hand-crafted features of robots without the difficulties associated with annotation.
We did not observe any significant improvements using only metaphor information to predict robot expectations. This may be because the features that can be gained from language models do not contain information on the physical interactions that the metaphors have. Thus, to gain more use from these metaphors, language models may need to ground their understanding of concepts in physical experience [4].
IV-B Multiple Mode Results
Nearly all combinations of modalities, except M+IM, showed significant improvements over the baseline. In general, the best performing methods involved combinations of multiple modes of features. This suggests that different modes of features have complementary information that is useful in understanding users’ mental models. However, these combinations did not show significant improvements over single modes of features.
V Future Work and Conclusion
This work introduces features of robot embodiment to explore how people form mental models of robots. Our results show that features of embodiment can be used to better understand social and functional expectations of robots, and point out several ways to expand this work. In particular, the text-based metaphor features were not as helpful for understanding expectations as the other features. Future work can explore alternate way to calculate these features using other types of information. The MUFaSAA dataset also contains information on frequency of metaphor responses and levels of abstraction that describe how closely the robot resembles each metaphor. This additional information may be useful for generating more informative features for understanding users’ social and functional expectations of robots.
We hope that in developing a way to interact with embodiment data, designers in the future may be able to incorporate this data into their design process for both developing new robots and new behaviors for extant robots. By leveraging design information, designers can more accurately understand how their robot will be perceived by general populations. For robot designers, this can be used to decide which features should be included in a robot that either reinforce desired metaphors, or obscure unwanted metaphors. For interaction designers, having this understanding of expectations for embodiment are critical to decide which behaviors are worth developing.
The methods and initial results presented here are preliminary work that shows the potential for features of embodiment to be useful for determining how robots are expected to behave. Notably, there were only static images used to collect the data on social and functional expectations of the robot, however video data may more strongly set these expectations. These results are also subject to other differences based on external factors such as social and cultural contexts and the experiences of real-world interactions users have with these robots. While the results can be further refined, they show important relationships between how robots are embodied and how they are expected to act, providing insights for the physical and algorithmic design of future robots.
References
- Agarwal et al. [2021] Rishabh Agarwal, Max Schwarzer, Pablo Samuel Castro, Aaron C Courville, and Marc Bellemare. Deep reinforcement learning at the edge of the statistical precipice. Advances in neural information processing systems, 34:29304–29320, 2021.
- Bernotat et al. [2017] Jasmin Bernotat, Friederike Eyssel, and Janik Sachse. Shape it–the influence of robot body shape on gender perception in robots. In Social Robotics: 9th International Conference, ICSR 2017, Tsukuba, Japan, November 22-24, 2017, Proceedings 9, pages 75–84. Springer, 2017.
- Bernotat et al. [2021] Jasmin Bernotat, Friederike Eyssel, and Janik Sachse. The (fe) male robot: how robot body shape impacts first impressions and trust towards robots. International Journal of Social Robotics, 13:477–489, 2021.
- Bisk et al. [2020] Yonatan Bisk, Ari Holtzman, Jesse Thomason, Jacob Andreas, Yoshua Bengio, Joyce Chai, Mirella Lapata, Angeliki Lazaridou, Jonathan May, Aleksandr Nisnevich, et al. Experience grounds language. arXiv preprint arXiv:2004.10151, 2020.
- Carpenter et al. [2009] Julie Carpenter, Joan M Davis, Norah Erwin-Stewart, Tiffany R Lee, John D Bransford, and Nancy Vye. Gender representation and humanoid robots designed for domestic use. International Journal of Social Robotics, 1(3):261–265, 2009.
- Carpinella et al. [2017] Colleen M Carpinella, Alisa B Wyman, Michael A Perez, and Steven J Stroessner. The robotic social attributes scale (rosas) development and validation. In Proceedings of the 2017 ACM/IEEE International Conference on human-robot interaction, pages 254–262, 2017.
- Cha et al. [2015] Elizabeth Cha, Anca D Dragan, and Siddhartha S Srinivasa. Perceived robot capability. In 2015 24th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), pages 541–548. IEEE, 2015.
- Davis [1989] Fred D Davis. Perceived usefulness, perceived ease of use, and user acceptance of information technology. MIS quarterly, pages 319–340, 1989.
- Deng et al. [2019] Eric Deng, Bilge Mutlu, Maja J Mataric, et al. Embodiment in socially interactive robots. Foundations and Trends® in Robotics, 7(4):251–356, 2019.
- Deng et al. [2009] Jia Deng, Wei Dong, Richard Socher, Li-Jia Li, Kai Li, and Li Fei-Fei. Imagenet: A large-scale hierarchical image database. In 2009 IEEE conference on computer vision and pattern recognition, pages 248–255. Ieee, 2009.
- Dennler et al. [2023] Nathaniel Dennler, Changxiao Ruan, Jessica Hadiwijoyo, Brenna Chen, Stefanos Nikolaidis, and Maja Matarić. Design metaphors for understanding user expectations of socially interactive robot embodiments. ACM Transactions on Human-Robot Interaction, 12(2):1–41, 2023.
- Fiske et al. [2007] Susan T Fiske, Amy JC Cuddy, and Peter Glick. Universal dimensions of social cognition: Warmth and competence. Trends in cognitive sciences, 11(2):77–83, 2007.
- Hoffmann et al. [2018] Laura Hoffmann, Nikolai Bock, and Astrid M Rosenthal vd Pütten. The peculiarities of robot embodiment (emcorp-scale) development, validation and initial test of the embodiment and corporeality of artificial agents scale. In Proceedings of the 2018 ACM/IEEE international conference on human-robot interaction, pages 370–378, 2018.
- Jung et al. [2017] Heekyoung Jung, Heather Wiltse, Mikael Wiberg, and Erik Stolterman. Metaphors, materialities, and affordances: Hybrid morphologies in the design of interactive artifacts. Design Studies, 53:24–46, 2017.
- Kalegina et al. [2018] Alisa Kalegina, Grace Schroeder, Aidan Allchin, Keara Berlin, and Maya Cakmak. Characterizing the Design Space of Rendered Robot Faces, page 96–104. Association for Computing Machinery, New York, NY, USA, 2018. ISBN 9781450349536. URL https://doi.org/10.1145/3171221.3171286.
- Khadpe et al. [2020] Pranav Khadpe, Ranjay Krishna, Li Fei-Fei, Jeffrey Hancock, and Michael Bernstein. Conceptual metaphors impact perceptions of human-ai collaboration. arXiv preprint arXiv:2008.02311, 2020.
- Kieras and Bovair [1984] David E Kieras and Susan Bovair. The role of a mental model in learning to operate a device. Cognitive science, 8(3):255–273, 1984.
- Kiesler and Goetz [2002] Sara Kiesler and Jennifer Goetz. Mental models of robotic assistants. In CHI’02 extended abstracts on Human Factors in Computing Systems, pages 576–577, 2002.
- Kim and Maher [2020] Jingoog Kim and Mary Lou Maher. Conceptual metaphors for designing smart environments: Device, robot, and friend. Frontiers in Psychology, 11:198, 2020.
- Kwon et al. [2016] Minae Kwon, Malte F Jung, and Ross A Knepper. Human expectations of social robots. In 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), pages 463–464. IEEE, 2016.
- Mathur and Matarić [2020] Leena Mathur and Maja J Matarić. Introducing representations of facial affect in automated multimodal deception detection. In Proceedings of the 2020 International Conference on Multimodal Interaction, pages 305–314, 2020.
- Moon and Nass [1996] Youngme Moon and Clifford Nass. How “real” are computer personalities? psychological responses to personality types in human-computer interaction. Communication research, 23(6):651–674, 1996.
- Pedregosa et al. [2011] Fabian Pedregosa, Gaël Varoquaux, Alexandre Gramfort, Vincent Michel, Bertrand Thirion, Olivier Grisel, Mathieu Blondel, Peter Prettenhofer, Ron Weiss, Vincent Dubourg, et al. Scikit-learn: Machine learning in python. the Journal of machine Learning research, 12:2825–2830, 2011.
- Perugia et al. [2022] Giulia Perugia, Stefano Guidi, Margherita Bicchi, and Oronzo Parlangeli. The shape of our bias: Perceived age and gender in the humanoid robots of the abot database. In 2022 17th ACM/IEEE International Conference on Human-Robot Interaction (HRI), pages 110–119. IEEE, 2022.
- Phillips et al. [2018] Elizabeth Phillips, Xuan Zhao, Daniel Ullman, and Bertram F Malle. What is human-like? decomposing robots’ human-like appearance using the anthropomorphic robot (abot) database. In Proceedings of the 2018 ACM/IEEE international conference on human-robot interaction, pages 105–113, 2018.
- Rae et al. [2013] Irene Rae, Leila Takayama, and Bilge Mutlu. The influence of height in robot-mediated communication. In 2013 8th ACM/IEEE International Conference on Human-Robot Interaction (HRI), pages 1–8. IEEE, 2013.
- Rueben et al. [2021] Matthew Rueben, Jeffrey Klow, Madelyn Duer, Eric Zimmerman, Jennifer Piacentini, Madison Browning, Frank J Bernieri, Cindy M Grimm, and William D Smart. Mental models of a mobile shoe rack: exploratory findings from a long-term in-the-wild study. ACM Transactions on Human-Robot Interaction (THRI), 10(2):1–36, 2021.
- Schrum et al. [2020] Mariah L Schrum, Michael Johnson, Muyleng Ghuy, and Matthew C Gombolay. Four years in review: Statistical practices of likert scales in human-robot interaction studies. In Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, pages 43–52, 2020.
- Voida et al. [2008] Stephen Voida, Elizabeth D Mynatt, and W Keith Edwards. Re-framing the desktop interface around the activities of knowledge work. In Proceedings of the 21st annual ACM symposium on User interface software and technology, pages 211–220, 2008.
- Wolf et al. [2020] Thomas Wolf, Lysandre Debut, Victor Sanh, Julien Chaumond, Clement Delangue, Anthony Moi, Pierric Cistac, Tim Rault, Rémi Louf, Morgan Funtowicz, et al. Transformers: State-of-the-art natural language processing. In Proceedings of the 2020 conference on empirical methods in natural language processing: system demonstrations, pages 38–45, 2020.
- Zhu et al. [2015] Yukun Zhu, Ryan Kiros, Rich Zemel, Ruslan Salakhutdinov, Raquel Urtasun, Antonio Torralba, and Sanja Fidler. Aligning books and movies: Towards story-like visual explanations by watching movies and reading books. In Proceedings of the IEEE international conference on computer vision, pages 19–27, 2015.