Simultaneous Distributed Estimation and Attack Detection/Isolation in Social Networks: Structural Observability, Kronecker-Product Network, and Chi-Square Detector
Abstract
This paper considers distributed estimation of linear systems when the state observations are corrupted with Gaussian noise of unbounded support and under possible random adversarial attacks. We consider sensors equipped with single time-scale estimators and local chi-square () detectors to simultaneously opserve the states, share information, fuse the noise/attack-corrupted data locally, and detect possible anomalies in their own observations. While this scheme is applicable to a wide variety of systems associated with full-rank (invertible) matrices, we discuss it within the context of distributed inference in social networks. The proposed technique outperforms existing results in the sense that: (i) we consider Gaussian noise with no simplifying upper-bound assumption on the support; (ii) all existing -based techniques are centralized while our proposed technique is distributed, where the sensors locally detect attacks, with no central coordinator, using specific probabilistic thresholds; and (iii) no local-observability assumption at a sensor is made, which makes our method feasible for large-scale social networks. Moreover, we consider a Linear Matrix Inequalities (LMI) approach to design block-diagonal gain (estimator) matrices under appropriate constraints for isolating the attacks.
Index Terms— Attack detection and isolation, Kronecker-product network, distributed estimation, -test.
1 Introduction
The unprecedented large size of social networks mandates distributed sensing, inference, and detection [1, 2, 3, 4, 5, 6, 7], where the information is collected and processed locally while meeting certain security concerns. Recent distributed estimation protocols [6, 7, 8, 9, 10, 11] are prone to faults/attacks that may result in inaccurate state estimates. Different attack detection and FDI (fault detection and isolation) strategies are thus proposed in the literature, ranging in applications from biological modeling [12] to smart-grid monitoring [13, 14], and from centralized approaches [15, 16, 17, 18, 19, 20] to more recent distributed methods [21, 22, 23]. Among the centralized solutions, deterministic FDI and attack detection methods design decision thresholds based on the upper-bound on the noise support [17, 18], while, in contrast, probabilistic -test with no such assumption on the noise is proposed in [15] and further developed in [19, 20]. Among the distributed strategies, [23] requires injecting a watermarking input signal conceding to a loss in the control/estimation performance, which is not applicable to autonomous systems (such as the social network model in this paper). In order to close this gap, this paper aims at developing a technique for distributed inference of autonomous (social) systems while simultaneously detecting and isolating adversarial attacks locally with no central coordinator.
The main contributions of this paper are as follows. (i) This work considers a windowed benchmark to locally design probabilistic decision thresholds based on certain false alarm rates (FARs). This is in contrast to existing deterministic thresholds assuming certain upper-bound on the noise support [17, 18], which results in faulty outcome when the noise upper-bound is considerably larger than the attack/fault magnitude. (ii) This work extends the recent centralized detectors [19, 20] to distributed ones, where the sensors are widespread over a large social network and, thus, the centralized solutions are infeasible/undesirable due to heavy communication loads or inability for parallel processing. In this direction, the notion of Kronecker-product network [24] is used to perceive (structural) observability of the composite social/sensor network, which allows to find minimal connectivity requirement on the sensor network for distributed estimation/detection. (iii) Our distributed technique, as in [21, 22], does not require local-observability at every sensor. However, unlike fixed biasing faults/attacks on sensor outputs in [21, 22], this work extends the results to general anomalies in the form of a random variable. In particular, we adopt the notion of distance measure [19], a scalar variable to compare the residual variance in presence and absence of attacks.
2 Problem Formulation
We consider the interaction of individuals in a social network as a linear-structure-invariant (LSI) autonomous model [4, 5, 7, 6],
| (1) |
where is the time-step, is the social system matrix associated with social digraph , is additive i.i.d noise vector, and vector represents the global social state. Note that is the size of social network and represents the ’th individual’s social state, e.g., opinion, rumor, or attitude [1, 2, 3, 4, 6, 7, 5]. The state of individual at time is a weighted average of the states of its in-neighbors in and its own previous state . This is well-justified for opinion-dynamics in social systems, and particularly implies that matrix is (structurally) full-rank [7]. Consider social sensors (agents or information-gatherers [5]) sensing the state of some individuals as,
| (2) |
with as the measurement matrix, as possible attack and as Gaussian noise at sensor at time . Define as the covariance matrix of the i.i.d noise vector . Throughout this paper, without loss of generality, we assume every sensor observes one state variable, i.e., . Further, as in similar works [15, 19, 20], we assume the system and measurement noise covariance ( and ) are known. Then, sensors share their information over a sensor network . Clearly, system is not locally observable to any sensor, but globally observable to all sensors. The condition on -observability is given in the following lemma.
Lemma 1
[7] Given a social network (with structurally full-rank adjacency matrix ), if at least one social state is sensed in every strongly-connected-component (SCC) in , then, the pair is (structurally) observable.
Given (social) system (1) and state observations (2) satisfying Lemma 1, we aim to design a distributed iterative procedure to simultaneously estimate the (social) state while detecting adversary attacks at (social) sensors. The attack by the adversary is modeled as an additive random term at sensor in (2). The proposed distributed estimation makes the entire system observable to every sensor, and the attack-detection technique enables each sensor to locally detect anomalies in its observation with a certain FAR (false-alarm rate).
3 Main Algorithm
We consider a modified version of the single time-scale distributed estimator in [7] with one step of averaging on a-priori estimates (similar to DeGroot consensus model [8]) and one step of measurement update (also known as innovation [8]),
| (3) | |||||
| (4) |
with stochastic matrix as the adjacency matrix of the sensor network representing the fusion weights among the sensors, as the local gain matrix at agent , and and as the state estimate at time given all the information of agent and its in-neighbors , respectively, at time and . In contrast to double time-scale estimators/observers [11] with many consensus iterations between every two consecutive time-steps and of social dynamics (1), the estimator (3)-(4) performs one iteration of information fusion between steps and , which is more efficient in terms of computation/communication loads.
Define the estimation error at agent as and the error vector . Following similar procedure as in [6], the error dynamics is as follows,
| (5) |
with , as the feedback gain matrix, and as the collective vector of noise-related terms as,
| (6) | ||||
| (7) |
with as the vector of ’s of size and . Following Kalman theory, for bounded steady-state estimation error, needs to be observable, characterizing the distributed observability condition for network of estimators/observers [25]. Using structured system theory, this condition can be investigated via graph theoretic notions. In this direction, the associated network to is a Kronecker-product network, whose observability condition relies on the structure of both and . Given the social network , the conditions on the sensor network to satisfy distributed observability follows the recent results on composite-network theory and network observability discussed in [24], which is summarized in the following lemma.
Lemma 2
For an observable pair , the feedback gain matrix can be designed to stabilize the error dynamics (5). Mathematically, for , we need to design such that (Schur stability of error dynamics (5)) for general social systems with with as the spectral radius. As mentioned before, for distributed case, needs to be further block-diagonal such that each sensor only uses local information in its own neighborhood. The iterative LMI-based algorithm to design such block-diagonal gain is given in [26]. In attack-free scenario, the distributed estimator/observer (3)-(4) with proper gain ensures tracking the global social state with bounded steady-state error as discussed in [6, 7]. Next, in this section, we further study the performance of the proposed protocol in the presence of non-zero random attack signals. Define as the estimated output at sensor at time . To detect possible attacks, each sensor calculates its residual as the difference of its original output and the estimated one,
| (8) |
Having , the steady-state error in (5) only relies on the term defined in (6) as,
| (9) |
From (8) and (9), it is clear that for , only the residual at sensor is biased with no effect on the residual of other sensors . This allows to isolate the attacked sensor as only depends on and not on ’s. To detect a possible attack at agent via residual , the non-zero term needs to be sufficiently larger than other noise terms. This ensures that the residual in attacked case is large enough to be distinguished from the noise terms in attack-free case. This is done by adding the constraint (with as a pre-selected lower-bound) to the proposed LMI in [26]. To the best of our knowledge, no other analytical solution for such constrained design is given in the literature. Clearly, the detecting probability of an attack depends on the magnitude of , which justifies the probabilistic threshold design. In this direction, we consider a distributed probability-based -test which outperforms the deterministic fault/attack detection methods as it considers noise of unbounded support. In this case, instead of a deterministic threshold with (no attack) or (attack detected) outcome, different probabilistic thresholds (with different sensitivities) are defined each assigned with an FAR. In fact, higher residual-to-noise ratio (RNR) stimulates the threshold with lower FAR. In this direction, first the covariance of error and (attack-free) residuals need to be calculated, which are tied with the noise covariance and . Let and . Then, from (5),
| (10) |
Knowing that , the first term in (10) goes to zero. Therefore, it can be proved from [4] that for ,
| (11) |
with . For attack-free case ( in (6)),
| (12) |
where is the ’s matrix of size . Applying the and -norm operators,
| (13) |
Then, the upper-bound on is,
with . Then, using (11),
| (14) |
where , , and . Note that in (14) the error covariance is scaled by the number of sensors . From (14), assuming no attack is present (), a conservative approximation for error variance at sensor is . Then, following the discussion in [19], the residual in (8) can be assumed as a zero-mean Gaussian variable with maximum variance , i.e., . Define,
| (15) |
with as the length of the sliding window111In general, each agent can consider a different length for the horizon T.. It is known that, for a Gaussian variable , scalars and follow -distribution with degree and respectively ( and ) [27]. In fact, these so-called distance measures and give an estimate of variance of relative to the attack-free variance [19], and are known to outperform simple detectors comparing absolute residual to a threshold as in [21, 22]. Next, we determine the decision threshold on based on a pre-specified FAR . It can be shown that where is the cumulative distribution function (CDF) of -distribution. Then,
| (16) |
with as the inverse regularized lower incomplete gamma function [27]. Using (16), our attack detection logic at each sensor is as follows,
| (17) |
It should be noted that the existing -based attack detection scenarios in literature are all centralized [15, 19, 20] and in this work, using distributed estimation, we enable detection of attacks locally at every sensor with no need of a central unit. We summarize our proposed simultaneous distributed estimation and attack detection technique in Algorithm 1.
Note that after detecting a malicious attack with low FAR, the strategy in [28] can be adopted to remove unreliable data and replace the compromised sensor with its observationally equivalent counterpart to regain distributed observability.
4 Simulation Results
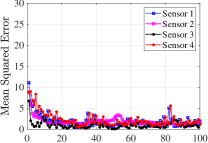
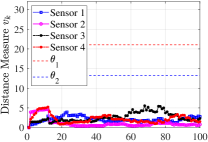
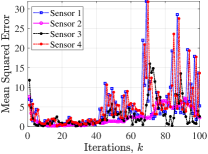
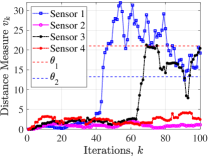
We evaluate our theoretical results on an example social network of state nodes with sensor observations shown in Fig. 1. The network of sensors is considered as a cycle (satisfying Lemma 2). The fixed non-zero entries of and are chosen randomly in . Further, implying a potentially unstable system, , and non-zero entries of are set as . Using MATLAB’s CVX, the stabilizing block-diagonal gain is designed via the iterative LMI in [26] subject to , which results in , , , and . In attack-free case, each sensor is able to track the global social state over time via protocol (3)-(4). The time-evolution of mean squared errors and distance measures at all sensors are shown in Fig. 2(top). Next, considering two non-zero attack sequences as for and for , the distance measures ’s over a sliding window of -step length are shown in Fig. 2(bottom). The figure clearly shows that the attacks affect the estimation error at all sensors. Setting two FARs , , the associated decision thresholds are , via (16). From the figure, the less conservative threshold reveals both attacks, while only detects one and the other one remains stealthy most of the times.

5 Conclusion
We proposed an algorithm for simultaneous estimation of states and attack detection over a distributed sensor network. Using a windowed chi-square detector, every sensor is able to locally detect possible measurement anomalies causing the residuals to exceed an FAR-based threshold. As future research directions, the results in [5, 29] can be adopted to optimally locate the sensing nodes and design the network among the social sensors to reduce cost. Additionally, adopting the pruning strategies in [1, 2], one can change the social network structure and, in turn, tune its observability and information flow to improve estimation/detection properties.
References
- [1] M. Doostmohammadian, H. R. Rabiee, and U. A. Khan, “Centrality-based epidemic control in complex social networks,” Social Network Analysis and Mining, vol. 10, pp. 1–11, 2020.
- [2] P. Block, M. Hoffman, I. J. Raabe, J. B. Dowd, C. Rahal, R. Kashyap, and M. C. Mills, “Social network-based distancing strategies to flatten the COVID-19 curve in a post-lockdown world,” Nature Human Behaviour, vol. 4, no. 6, pp. 588–596, 2020.
- [3] H. Wai, A. Scaglione, and A. Leshem, “Active sensing of social networks,” IEEE Transactions on Signal and Information Processing over Networks, vol. 2, no. 3, pp. 406–419, 2016.
- [4] U. A. Khan and A. Jadbabaie, “Collaborative scalar-gain estimators for potentially unstable social dynamics with limited communication,” Automatica, vol. 50, no. 7, pp. 1909–1914, 2014.
- [5] S. Pequito, S. Kar, and A. P. Aguiar, “Minimum number of information gatherers to ensure full observability of a dynamic social network: A structural systems approach,” in IEEE Global Conference on Signal and Information Processing. IEEE, 2014, pp. 750–753.
- [6] M. Doostmohammadian, H. R. Rabiee, and U. A. Khan, “Cyber-social systems: modeling, inference, and optimal design,” IEEE Systems Journal, vol. 14, no. 1, pp. 73–83, 2019.
- [7] M. Doostmohammadian and U. Khan, “Graph-theoretic distributed inference in social networks,” IEEE Journal of Selected Topics in Signal Processing, vol. 8, no. 4, pp. 613–623, Aug. 2014.
- [8] S. Kar and J. M. F. Moura, “Consensus + innovations distributed inference over networks: cooperation and sensing in networked systems,” IEEE Signal Processing Magazine, vol. 30, no. 3, pp. 99–109, 2013.
- [9] A. Mitra and S. Sundaram, “Distributed observers for LTI systems,” IEEE Transactions on Automatic Control, vol. 63, no. 11, pp. 3689–3704, 2018.
- [10] P. Duan, Z. Duan, G. Chen, and L. Shi, “Distributed state estimation for uncertain linear systems: A regularized least-squares approach,” Automatica, vol. 117, pp. 109007, 2020.
- [11] X. He, X. Ren, H. Sandberg, and K. H. Johansson, “Secure distributed filtering for unstable dynamics under compromised observations,” in IEEE 58th Conference on Decision and Control (CDC), 2019, pp. 5344–5349.
- [12] M. Mansouri, M. N. Nounou, and H. N. Nounou, “Improved statistical fault detection technique and application to biological phenomena modeled by s-systems,” IEEE Transactions on Nanobioscience, vol. 16, no. 6, pp. 504–512, 2017.
- [13] H. Karimipour, A. Dehghantanha, R. M. Parizi, K. R. Choo, and H. Leung, “A deep and scalable unsupervised machine learning system for cyber-attack detection in large-scale smart grids,” IEEE Access, vol. 7, pp. 80778–80788, 2019.
- [14] M. Ozay, I. Esnaola, F. T. Y. Vural, S. R. Kulkarni, and H V. Poor, “Machine learning methods for attack detection in the smart grid,” IEEE Transactions on Neural Networks and Learning Systems, vol. 27, no. 8, pp. 1773–1786, 2015.
- [15] B. Brumback and M. Srinath, “A chi-square test for fault-detection in Kalman filters,” IEEE Transactions on Automatic Control, vol. 32, no. 6, pp. 552–554, 1987.
- [16] H. Fawzi, P. Tabuada, and S. Diggavi, “Secure estimation and control for cyber-physical systems under adversarial attacks,” IEEE Transactions on Automatic control, vol. 59, no. 6, pp. 1454–1467, 2014.
- [17] J. Kim, C. Lee, H. Shim, Y. Eun, and J. H. Seo, “Detection of sensor attack and resilient state estimation for uniformly observable nonlinear systems having redundant sensors,” IEEE Transactions on Automatic Control, vol. 64, no. 3, pp. 1162–1169, 2018.
- [18] M. S. Chong, M. Wakaiki, and J. P. Hespanha, “Observability of linear systems under adversarial attacks,” in American Control Conference (ACC). IEEE, 2015, pp. 2439–2444.
- [19] R. Tunga, C. Murguia, and J. Ruths, “Tuning windowed chi-squared detectors for sensor attacks,” in American Control Conference (ACC). IEEE, 2018, pp. 1752–1757.
- [20] Z. Guo, D. Shi, K. H. Johansson, and L. Shi, “Optimal linear cyber-attack on remote state estimation,” IEEE Transactions on Control of Network Systems, vol. 4, no. 1, pp. 4–13, 2017.
- [21] M. Doostmohammadian and N. Meskin, “Sensor fault detection and isolation via networked estimation: Full-rank dynamical systems,” IEEE Transactions on Control of Network Systems, 2020.
- [22] M. Deghat, V. Ugrinovskii, I. Shames, and C. Langbort, “Detection and mitigation of biasing attacks on distributed estimation networks,” Automatica, vol. 99, pp. 369–381, 2019.
- [23] B. Satchidanandan and P. R. Kumar, “Dynamic watermarking: Active defense of networked cyber–physical systems,” Proceedings of the IEEE, vol. 105, no. 2, pp. 219–240, 2016.
- [24] M. Doostmohammadian and U. A. Khan, “Minimal sufficient conditions for structural observability/controllability of composite networks via kronecker product,” IEEE Transactions on Signal and Information Processing over Networks, vol. 6, pp. 78–87, 2019.
- [25] M. Doostmohammadian and U. A. Khan, “On the characterization of distributed observability from first principles,” in 2nd IEEE Global Conference on Signal and Information Processing, 2014, pp. 914–917.
- [26] U. A. Khan and A. Jadbabaie, “Coordinated networked estimation strategies using structured systems theory,” in 49th IEEE Conference on Decision and Control, 2011, pp. 2112–2117.
- [27] P. E. Greenwood and M. S. Nikulin, A guide to chi-squared testing, John Wiley & Sons, 1996.
- [28] M. Doostmohammadian, H. R. Rabiee, H. Zarrabi, and U. A. Khan, “Distributed estimation recovery under sensor failure,” IEEE Signal Processing Letters, vol. 24, no. 10, pp. 1532–1536, 2017.
- [29] M. Doostmohammadian, H. R. Rabiee, and U. A. Khan, “Structural cost-optimal design of sensor networks for distributed estimation,” IEEE Signal Processing Letters, vol. 25, no. 6, pp. 793–797, 2018.