Real-time Path Planning of Driver-less Mining Trains with Time-dependent Physical Constraints
Abstract
While the increased automation levels of production and operation equipment have led to improved productivity of mining activity in open pit mines, the capacity of mine transport system become a bottleneck. The optimisation of mine transport system is of great practical significance to reduce the production and operation cost and improve the production and organizational efficiency of mines. In this paper we first formulate a multi-objective optimisation problem for mine railway scheduling by introducing a set of mathematical constraints. As the problem is NP-hard, we then devise a Mixed Integer Programming based solution to solve this problem, and develop an online framework accordingly. We finally conduct test cases to evaluate the performance of the proposed solution. Experimental results demonstrate that the proposed solution is efficient and able to generate train schedule in a real-time manner.
keywords:
mine railway; train scheduling; mixed integer programming; intelligent transportation system1 Introduction
The optimisation of railroad transportation system in open pit mines is an important part of the optimisation of complex large system in open pit mines. It is of great practical significance to reduce the production and operation cost, together with improving the production and organizational efficiency of mines. In recent years, while the increased automation levels of production and operation equipment have led to improved productivity, part of the mine transport system bottleneck problem began to highlight, especially on the basis of the static road network analysis method of the traditional routing optimisation planning models and algorithms. When faced with more complex and variable scheduling decisions, traditional solutions are easily limited, and difficult to get global realistic optimal results.
Various research work, such as mixed integer programming and dynamic programming, have been conducted to solve urban railroad transportation optimisation problems in the literature [6, 10, 28, 30, 32, 33]. Compared with urban railway networks, mine railway networks have limited amount of tracks, most of which are bi-directional single-track. This leads to some particular problems as follows.
-
•
Track allocation: Giving most tracks are bi-directional single-track, the transportation capacity is limited by the number of receiving and departure tracks, the number of siding/meetpoints, and the length of single-tracks. Moreover, the capacity is also restricted by track maintenance.
-
•
Train conflict: For a bidirectional single-track, there are mainly two conflicts between trains. First, a pre-defined time difference is necessary to ensure safe operation when trains running in the same direction; Second, trains in opposite directions cannot be in the same segment at any time.
Given the problems stated above, the mine railroad scheduling problem is a complex optimisation problem, and the results under different decisions are far from each other. With purpose of less running time of all trains and maximizing the total amount of rolling stock, this paper proposes an integrated model to optimize train timetable and track allocation. The main contributions of this paper are listed as follows.
-
•
We first formulate a multi-objective optimisation problem for mine railway scheduling by introducing a set of mathematical constraints.
-
•
As the problem is NP-hard, we then devise a MIP-based solution to solve this problem in a real-time manner.
-
•
We finally conduct test cases to demonstrate the validity and effectiveness of the solution.
In the following sections, Section 2 presents a review on the railway scheduling and train timetabling problems. Section 3 introduces the system model and describes the mining railroad optimisation problem. Section 4 provides the mathematical formulation for the objective and the set of constraints. Section 5 presents a description of all the modules that constitute the developed solution, in order for all the readers to get an understanding of the entire process. Section 6 presents a summary of the result for the tests carried out to evaluate the proposed solution. Section 7 is dedicated to the conclusions.
2 Related Works
An enormous number of studies have been conducted on railway scheduling and train timetabling problems [4, 7, 13, 11, 17, 22]. The research work can be classified into three main categories: the train scheduling and rescheduling problem, the periodic and non-periodic timetabling problem, and the passenger train and freight train timetabling problem [15].
Train scheduling is an offline problem that determines the arrival and departure times for trains at each station before the schedule is executed, e.g., [1, 16, 19, 23, 27]. With a planned schedule, rescheduling is a real-time problem that aims to determine detailed train movements and timetables to minimize train deviations, e.g., [12, 29, 31, 34]. Sanat et al. [23] studied a train scheduling problem in a large national railway network, and presented two flexible heuristics based on a Mixed Integer Program formulation for local optimisation to improve infrastructure utilization. Wang et al. [29] proposed a train rescheduling optimisation model in the case of the vehicle breakdown on a metro line. Efficient rescheduling strategies including flexible short-turning and adding backup trains are particularly formulated into the model. Bersani et al. [1] formalized demand-oriented scheduling and rescheduling models in order to propose a dynamic timetable, and proposed a min-max method to address operational constraints related to train capacity, train speed limits, train transfers, possible conflict in the track section use, with the main objective to minimize the travel time.
Periodic timetabling requires that most or all train paths repeat in time with a certain period (e.g., 12 hours), e.g., [9, 20, 25, 26, 35]. However, as it becomes difficult to obtain effective periodic schedules when dealing with interruptions or conflicts (e.g. track maintenance), a non-periodic timetable becomes more appropriate, e.g., [5, 8]. Huang et al. [9] integrated stop planning, service planning, and scheduling in a periodic timetabling problem and modelled it as a Mixed Integer Linear Programming formulation to minimize the average travel delay of passengers. They then developed a genetic algorithm supported by a scheduling heuristic to solve the problem for better scalability and efficiency.
Because railways provide both passenger and freight services, there are naturally passenger train and freight train timetabling problems, e.g., [2, 3, 14, 18, 21, 24]. Mu and Dessouky [18] introduced two mathematical formulations to cope with the rapidly increasing freight demand for railway transportation, and presented several heuristics that can significantly reduce the solution time of the exact method carried out by CPLEX yet produce a satisfactory solution quality. Bešinović et al. [3] introduced the integrated passenger and freight train timetable adjustment problem which handles both passenger as well as freight trains, and developed a mixed integer linear programming model to simultaneously retime, reroute and cancel trains in the network.
These research lines are viewed from different perspectives but are not truly independent of each other. For example, passenger train scheduling is usually a periodic timetabling problem. Li et al. [15] studied a non-periodic freight train scheduling problems, in which a schedule is planned for freight trains and can be different in different periods of the day. The proposed method considers car flow transfer between consecutive trains and the shipment delivery time requirement. A tabu search algorithm is developed that extends the applicability of the proposed optimisation method for large-scale problems. Experiments on real-world instances of the Menghua railway indicate the effectiveness of the proposed algorithm.
3 Problem Description

As shown in fig. 1, it is a sample layout of mining railway network, where trains start from station A, travel via the tracks, load mine from load-out G, and return back to station A.
The mining railroad optimisation problem is to determine the best feasible timetable for a set of trains in order to load mines as many as possible. The related constraints are to satisfy restrictive operational constraints (e.g., track capacity, travel speed, safe distance etc.) and to avoid possible conflicts when using each single track.
3.1 System Model
Define a physical network with a set of nodes S and a set of links W. The set S consists of switch stations (), and load-outs () in physical network. is the set of links in physical network, where stands for link connecting node to node . The set W consists of mainline tracks (), siding tracks () and crossovers () in physical network. For each link , let
-
•
be the capacity of : Here capacity is the maximum number of trains that can stand on the link at any point of time.
-
•
be the travel time from i to j, where f is the speed profile based function.
-
•
be the travel time from j to i, where f is the speed profile based function.
In order to model the business operation of mine loading, for each load-out , let be the average loading time for a train.
Let be the set of time instants, where time is discretized into discrete time instants of length g minutes. For instance if we take g = 5 then a period of 1 hour would be represented by discrete set in our model.
3.2 Train Model
Let be the set of real trains travelling in the physical network . For each train ,we will get the following set of inputs:
-
•
: Sequence of scheduled load-outs to visit.
-
•
: Scheduled departure time.
-
•
: Scheduled departure location.
As we have a cyclical network and train changes direction (turns back) after going to a load-out, in order to model this behaviour we will break down the train journey into different parts. Each part will be represented by a different model train. Thus, if a train goes to load-outs, its whole journey will be represented by a set of model trains called , where each model train represents a specific segment of train ’s journey. Accordingly, one business rule will be added that any model train can depart only after its predecessor has finished its journey.
For example, considering the case of a train starting from station A and going to two load-outs G1 and G2, its journey will be modelled as follows:
| Model Train | Departure Node | Destination Node | Predecessor Train |
| A | G1 | null | |
| G1 | G2 | ||
| G2 | A |
From now on, we will use train to refer to model train only, unless specified otherwise. Thus, for each train , we will have the following set of information:
-
•
: Scheduled departure time.
-
•
: Scheduled departure location node.
-
•
: Final destination node of the train, after which it will disappear from the network.
-
•
: Predecessor train of train t.
3.3 Time Space Network
We here consider a time-space network , where N denotes the node set and A denotes the arc set. For each node , let be the set of all the outbound arcs of node , and be the set of all the inbound arcs of node .
Given a physical network , we then can construct the time-space network as follows:
-
•
For each load-out in , we replace it with two separate node (entry node) and (exit node), and add a load-out link (, ) into W. Let be the set of load-out links. By splitting the entry and exit point nodes for each load-out, we ensure that trains are staying at load-out for the required loading time. At the same time, we replace the related inbound links to and the related outbound links to . Accordingly, we have , , and , where indicates the required loading time.
-
•
For each link whose capacity , we break down this link into smaller links by adding dummy nodes into S and replacing the link with dummy links (with proportional travel time) as well. Note: After this operation, the capacity of each arc is 1. This operation guarantees that on every arc at any point of time only one train travels on that arc, which will in turn guarantee that trains maintain a safe headway separation while travelling in the same direction.
-
•
For each siding track , we add a siding node to and replace the siding track with two separate arcs and . Let be the set of siding nodes. Accordingly, we have and . For each link , let be the set of identical arcs in .
-
•
For each node , we add corresponding nodes in . For each train , we add corresponding virtual source node in , where represents the source node where train departs. We also add one sink into , where represents the sink node where every train terminates its journey.
-
•
For each link , we add following transit arcs into :
-
•
For each link , we then update as follows:
-
•
For each siding node , we add following waiting arcs into . In this way, we allow trains to wait/dwell on sidings.
-
•
For any load-out with loop capacity , we add waiting arcs between , for all . In this way, we allow trains to wait/dwell in the loops.
-
•
For each station node , we add an arc from that node to the sink, signifying that allows train cancelling in case of deadlock (i.e. we can cancel a train with a very high penalty). Thus we add these train disappearing arcs into :
-
•
For each train , we add an arc from the source to the scheduled starting node of that train, and we add these starting arcs into :
-
•
In all the above cases, whenever an arc is added to the time-space network, we also add this arc to the Outbound arc set of node and to the Inbound arc set of node .
4 Mathematical Model
According to the definitions made in the previous section, the objective and the set of constraints are now presented in a formal manner.
4.1 Attributes
For each and a given train , there exists a cost attribute as follows:
where denotes an arc in the time space network representing possible movement (of a train) starting from node at time and terminating at node at time . The cost implies that we give weighted penalties for waiting/dwelling, where is constant parameter. The cost implies the penalty for late departure, where is constant parameter. The cost implies that we try to route trains as close as to the destination. The cost implies that we try to route trains along the shortest-time path.
4.2 Variables
For each and a given train , define the following binary decision variable:
4.3 Objective
Given the above cost attributes and variables, we then define the objective as follows:
4.4 Constraints
In particular, we formulate the related constraints as follows:
-
•
Flow conservation constraint: These constraints algebraically state that the sum of the flow through arcs directed toward a node plus that node’s supply, if any, equals the sum of the flow through arcs directed away from that node plus that node’s demand, if any.
-
•
Node capacity constraint: This constraint ensures that for each node excluding , trains can be held safely without any collision or deadlock at any time point.
-
•
Arc capacity constraint: This constraint implies that for any track, load-out in the network, at any time instant , there can only be at max one train travelling or staying.
-
•
Train departure constraint: This constraint implies that any train with predecessor not null, which represents the return trip of a real train, has to depart at the time when its predecessor train completes its journey.
5 Solution
Given an offline scenario, i.e. optimise the train schedule for a pre-defined time window, a traditional approach is to solve the above MIP problem directly. However, the above approach can not apply into the online scenario, since the solving time often turn out to be unacceptable. e.g., it may take several days to generate a train schedule for the next 24-hour. Instead, we here propose a solution framework for the online scenario.

As shown in fig. 2, it runs iteratively. The cycle length is pre-defined (e.g. every minutes), which is decided as per the business requirements (e.g. problem size, algorithm running time, etc). For each cycle, it contains steps as follows.
5.1 Pre-processing
In the pre-processing step, we use the current status as input, and formulate the above MIP problem, which complexity changes exponentially when variable size varies. To further reducing the running time, we adopt the following approaches to reduce the variables:
-
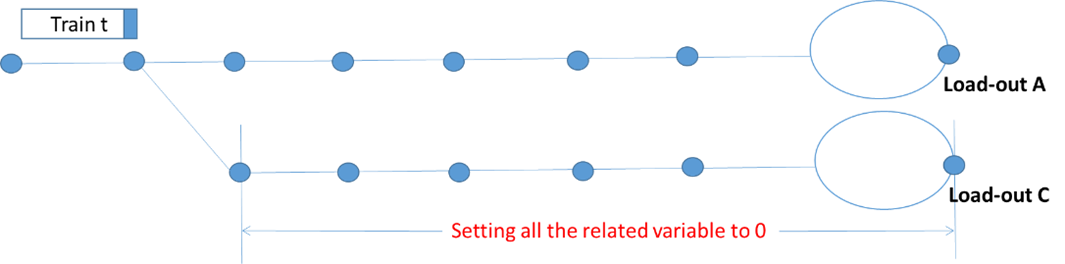
•
Initializing variables only for arcs on which train will travel: for each train, we only consider the reasonable arcs according to its destination. For example, in fig. 3 the train is heading for load-out A. We then can set all the unreasonable variables (i.e., those variables associated to the arcs heading for load-out C) to 0.
-
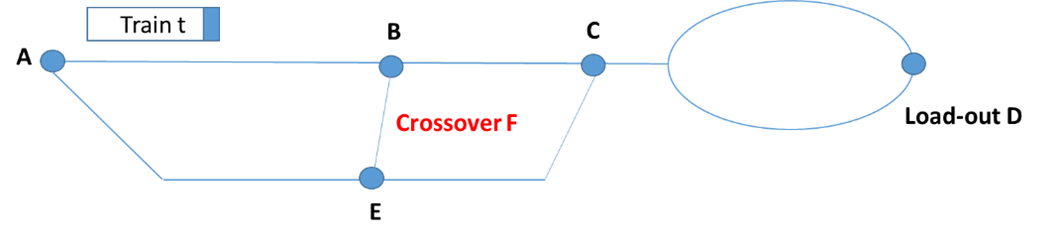
•
Removing variables corresponding to unrealistic movements: consider the train in fig. 4 going towards load-out, which is not allowed to move on track F. We then fix variables corresponding to such invalid movements to 0.
5.2 Solving MIP
In this step, we solve the formulated MIP problem via mathematical optimisation solver (e.g. Gurobi, Xpress, Cplex, etc). To better utilize the solver, we also integrate more strategies as follows:
-
•
Warm start: supply hints to help solver find an initial solution, which consist of pairs of variables and values, known as a warm start. The hints may come from soft business rules or human experience.
-
•
Solver tuning: use offline data to tune the solver, and adopt the solver setting for the online running.
5.3 Post-processing
After getting the MIP results, we then need to translate the math-style results into trains’ schedule solution. In particular, we need to combine trains with the related predecessor trains to get complete movements. As shown in table 1, we need to combine the results of , , to get the schedule of train .
5.4 Simulation/execution
For each given solution, we then validate the schedule further via simulation, and add more details including maintenance allocation. We finally trigger an actual execution by communicating the detailed schedule to trains.
6 Experiments and Results
In this section, we evaluate the performance of the proposed solution.
6.1 Experimental Environment Setting
We here consider the sample network in fig. 1, and has track capacity shown in fig. 5. As per the subsection 3.3, we then construct the time-space network of 20-minute time window in fig. 6, for which the time instant length is 5 minutes.


We then evaluate the proposed solution via the following test cases. From case 1 to case 4, we vary trains to schedule, generate the train schedule, and demonstrate the solution in time-space network.
6.2 Test Case 1
| Train Name | Departure Node | Departure Time | Destination Node |
| A | 0 | G |
Given a single train info in table 2, we are able to get the solution in less than one minute, where the train schedule for train Mtest01 is demonstrated via green-path in fig. 7.

6.3 Test Case 2
| Train Name | Departure Node | Departure Time | Destination Node |
| A | 0 | G | |
| G | 0 | B |
We have two trains to schedule in table 3, where train Mtest01 goes towards load-out G and train Mtest02 returns from load-out G. We are able to get the solution in less than one minute, where the train schedule for train Mtest01/Mtest02 are demonstrated via green-path/blue-path respectively in fig. 8.

6.4 Test Case 3
| Train Name | Departure Node | Departure Time | Destination Node |
| A | 0 | G | |
| G | 10 | B | |
| B | 0 | G |
We have three trains to schedule in table 4: both train Mtest01 and Mtest03 go towards load-out G from different start station; train Mtest02 goes back from load-out G with departure time constraint. We are able to get the solution in less than one minute, and the train schedule are demonstrated via in fig. 9. In particular, train Mtest01/Mtest02/Mtest03 schedule are demonstrated via green-path/blue-path/orange-path respectively.

6.5 Test Case 4
| Train Name | Departure Node | Departure Time | Destination Node |
| A | 0 | G | |
| G | 10 | B | |
| A | 0 | G |
Given three trains info in table 5, both train Mtest01 and Mtest03 go towards load-out G with same start station; train Mtest02 goes back from load-out G with departure time constraint. Similar to case 3, we are able to get the solution in less than one minute, and demonstrate the train schedule in fig. 10, where train Mtest01/Mtest02/Mtest03 schedule are showed via green-path/blue-path/orange-path respectively.

7 Conclusions
This work studied an online mining railway optimisation problem. We first formulated the problem as a novel MIP problem, and proposed an online solution accordingly. The solution has been evaluated via test cases. However, it is worthy mentioning that our model is an initial integrated optimisation model for mine railway scheduling, and station track allocation planning, which has more generalisation space for some specific purposes. Further research will focus on the following several aspects:
-
•
consider more practical constraints, such as ensuring first-come-first-serve policy near load-outs.
-
•
develop an effective heuristic algorithm to increase the efficiency of the solution.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Funding
This work was supported by the National Natural Science Foundation of China under Grant U21A20446; Guangzhou Applied Basic Research Program under Grant 202201011786.
References
- [1] C. Bersani, M. A. D. C. Estil-Les and R. Sacile, “Min-Max Approach for High-Speed Train Scheduling and Rescheduling Models,” in IEEE Access, vol. 9, pp. 41042-41051, 2021.
- [2] Ralf Borndörfer, Torsten Klug, Thomas Schlechte, Armin Fügenschuh, Thilo Schang and Hanno Schülldorf, “The Freight Train Routing Problem for Congested Railway Networks with Mixed Traffic,” in Transp.Sci., vol.50, no.2, pp. 408-423, May 2016.
- [3] N. Bešinović, B. Widarno and R. M. P. Goverde, “Adjusting freight train paths to infrastructure possessions,” 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), 2020.
- [4] V. Cacchiani, F. Furini and M.P. Kidd, “Approaches to a real-world train timetabling problem in a railway node,” in Omega, vol.58, pp. 97-110, 2016.
- [5] V. Cacchiani and P. Toth, “Nominal and robust train timetabling problems,” in Eur. J. Oper. Res., vol. 219, no. 3, pp. 727–737, Jun. 2012.
- [6] T. Ghasempour and B. Heydecker, “Adaptive railway traffic control using approximate dynamic programming,” in Transportation Research Part C: Emerging Technologies, vol.113, pp. 91-107, 2020.
- [7] S. Harrod, “Modeling network transition constraints with hypergraphs,” in Transp. Sci., vol. 45, no. 1, pp. 81–97, Feb. 2011.
- [8] S. Harrod, “A tutorial on fundamental model structures for railway timetable optimization,” in Surv. Oper. Res. Manage. Sci., vol. 17, no. 2, pp. 85–96, Jul. 2012.
- [9] P. Huang, C. Kung and C. Lin, “An Integrated Formulation and Optimization for Periodic Timetabling of Railway Systems,” 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), 2021.
- [10] Z. Hou, M. Zhou, L. Ning and H. Dong, “Automatic Train Regulation with Time Tuning and Holding Control under the Saturated Passenger Demand Condition,” 2021 33rd Chinese Control and Decision Conference (CCDC), 2021.
- [11] L. Kang and Q. Meng, “Two-phase decomposition method for the last train departure time choice in subway networks,” in Transp. Res. B, Methodol., vol. 104, pp. 568–582, Oct. 2017.
- [12] L. Kang, J. Wu, H. Sun, X. Zhu, and B. Wang, “A practical model for last train rescheduling with train delay in urban railway transit networks,” in Omega, vol. 50, pp. 29–42, 2015.
- [13] L. Kang, J. Wu, H. Sun, X. Zhu and Z. Gao, “A case study on the coordination of last trains for the beijing subway network,” in Transp. Res. B, Methodol., vol. 72, pp. 112–127, Feb. 2015.
- [14] L. Kang, X. Zhu, H. Sun, J. Puchinger, M. Ruthmair and B. Hu, “Modeling the first train timetabling problem with minimal missed trains and synchronization time differences in subway networks,” in Transp. Res. B, Methodol., vol. 93, pp. 17–36, Nov. 2016.
- [15] S. Li, H. Lv, C. Xu, T. Chen and C. Zou, “Optimized Train Path Selection Method for Daily Freight Train Scheduling,” in IEEE Access, vol. 8, pp. 40777-40790, 2020.
- [16] R. Liu, S. Li and L. Yang, “Collaborative optimization for metro train scheduling and train connections combined with passenger flow control strategy,” in Omega, vol. 90, 101990, 2020.
- [17] Z. Li, B. Mao, Y. Bai and Y. Chen, “Integrated optimization of train stop planning and scheduling on metro lines with express/local mode,” in IEEE Access, vol. 7, pp. 88534–88546, Jun. 2019.
- [18] S. Mu and M. Dessouky, “Scheduling freight trains traveling on complex networks,” in Transp. Res. B, Methodol., vol. 45, no. 7, pp. 1103–1123, 2011.
- [19] H. Niu, X. Zhou and R. Gao, “Train scheduling for minimizing passenger waiting time with time-dependent demand and skip-stop patterns: Nonlinear integer programming models with linear constraints,” in Transportation Research Part B, vol. 76, pp. 117-135, 2015.
- [20] G. Polinder, T. Breugem, T. Dollevoet and G. Maróti, “An adjustable robust optimization approach for periodic timetabling,” in Transportation Research Part B: Methodological, vol. 128, pp. 50-68, 2019.
- [21] O. Ozturk and J. Patrick, “An optimization model for freight transport using urban rail transit,” European Journal of Operational Research, vol.267, issue.3, pp. 1110-1121, 2018.
- [22] J. Qi, S. Li, Y. Gao, K. Yang and P. Liu, “Joint optimization model for train scheduling and train stop planning with passengers distribution on railway corridors,” in J. Oper. Res. Soc., vol. 69, no. 4, pp. 556-570, Jan. 2018.
- [23] R. Sanat, T. Dutt, A. Chandrababu, A. Abhilasha and G. N. S. Prasanna, “Optimizing Schedule of Trains in Context of a Large Railway Network,” 2018 21st International Conference on Intelligent Transportation Systems (ITSC), 2018
- [24] K. Sato and N. Fukumura, “Real-time freight locomotive rescheduling and uncovered train detection during disruption,” in European Journal of Operational Research, vol.221, issue.3, pp. 636-648, 2012.
- [25] D. Sparing and R. Goverde, “A cycle time optimization model for generating stable periodic railway timetables,” in Transportation Research Part B: Methodological, vol.98, pp. 198-223, 2017.
- [26] P. Schiewe and A. Schöbel, “Periodic Timetabling with Integrated Routing: Toward Applicable Approaches,” in Transp.Sci.,vol. 54, no.6, pp. 1714-1731, Sep. 2020.
- [27] Y. Wang, A. D’Ariano, J. Yin, L. Meng, T. Tang and B. Ning, “Passenger demand oriented train scheduling and rolling stock circulation planning for an urban rail transit line,” in Transportation Research Part B: Methodological, vol. 118, pp. 193-227, DEC., 2018.
- [28] Y. Wu, H. Yang, S. Zhao and P. Shang, “Mitigating unfairness in urban rail transit operation: A mixed-integer linear programming approach,” in Transportation Research Part B: Methodological, vol.149, pp. 418-442, 2021.
- [29] Z. Wang, S. Su, B. Su and T. Tang, “A metro train rescheduling approach considering flexible short-turning and adding backup trains strategies during disruptions in the case of the vehicle breakdown,” 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), 2021.
- [30] P. Xu, G. Feng, D. Cui, X. Dai, Q. Zhang and F. Chen, “Timetable Mapping Model and Dynamic Programming Approach for High-speed Railway Rescheduling,” 2020 39th Chinese Control Conference (CCC), 2020.
- [31] W. Xu, B. Xie, X. Zhang and L. Ning, “Timetable Rescheduling Considering Headway: A Genetic Algorithm Combined with the Benchmark Time Method,” 2020 IEEE 5th International Conference on Intelligent Transportation Engineering (ICITE), 2020.
- [32] J. Yin, D. Andrea, Y. Wang, J. Xun, S. Su and T. Tang, “Mixed-Integer Linear Programming Models for Coordinated Train Timetabling with Dynamic Demand,” 2019 IEEE Intelligent Transportation Systems Conference (ITSC), 2019
- [33] J Yin, T Tang et al., “Energy-efficient metro train rescheduling with uncertain time-variant passenger demands: An approximate dynamic programming approach,” in Transportation Research: Part B, vol.91, pp. 178-210, 2016.
- [34] Y. Zhu and R.Goverde, “Railway timetable rescheduling with flexible stopping and flexible short-turning during disruptions,” in Transportation Research Part B: Methodological, vol. 123, pp. 149-181, 2019.
- [35] J.-H. Zhong, M. Shen, J. Zhang, H. S.-H. Chung, Y.-H. Shi and Y. Li, “A Differential Evolution Algorithm With Dual Populations for Solving Periodic Railway Timetable Scheduling Problem,” in IEEE Transactions on Evolutionary Computation, vol. 17, no. 4, pp. 512-527, Aug. 2013.