Pseudo-Euclidean Billiards within Confocal Curves on the Hyperboloid of One Sheet
Abstract.
We consider a billiard problem for compact domains bounded by confocal conics on a hyperboloid of one sheet in the Minkowski space. We show that there are two types of confocal families in such setting. Using an algebro-geometric integration technique, we prove that the billiard within generalized ellipses of each type is integrable in the sense of Liouville. Further, we prove a generalization of the Poncelet theorem and derive Cayley-type conditions for periodic trajectories and explore geometric consequences.
Key words and phrases:
Billiards, Minkowski space, elliptic billiards, confocal quadrics, periodic trajectories, geodesics, hyperboloid2020 Mathematics Subject Classification:
70H06, 70H12, 14H70, 37J35, 37J38, 37J39, 37J461. Introduction
Mathematical billiard is a dynamical system where a particle moves freely within a domain and obeys the billiard law, where the angle of incidence equals angle of reflection, off the boundary [Bir27, KT91]. The behavior of such a mechanical system is dependent upon the geometric properties of the boundary and of the underlying space.
It is well known that classical theorems of Jacobi, Chasles, Poncelet, and Cayley and their generalizations imply integrability and many beautiful geometric properties of the billiards within confocal quadrics in Euclidean and pseudo-Euclidean spaces of arbitrary finite dimension, see e.g. [GTK07, KT09, DR12, DR13].
The main inspiration for our work comes from the paper [Ves90], where billiards within confocal families on a hyperboloid of two sheets were considered. There, the restriction of the Minkowski metric gives rise to the geometry of Lobachevsky. In this paper, we will study confocal families and the corresponding billiards on a hyperboloid of one sheet. The restriction of the metric will be Lorentzian in our case, and we get novel and intriguing geometric and dynamical properties of generalized elliptical billiards. The related topic of geodesic scattering on the hyperboloid of one sheet with the Euclidean metric has only recently been studied [VW20].
In Section 2 we introduce the three-dimensional Minkowski space and its properties. We also define and explore confocal families of conics as intersections of confocal families of cones with the hyperboloid of one sheet and analyze their properties. Interestingly enough, this leads to two different types of confocal families, and we give geometric description for each of them. Section 3 introduces billiards in Minkowski space and discusses basic properties of geodesics on the hyperboloid of one sheet. In Section 4 we provide a review of the relevant matrix factorization technique, adapted from [Ves90], which is applied to these two scenarios and proves the explicit integrability of the two billiard systems. It is interesting to note that the Lax pair will produce a discrete trajectory for any initial conditions, even in the cases when the consecutive points cannot be connected by geodesics. Section 5 addresses the Cayley condition for periodic orbits and addresses a Poncelet-like theorem. Lastly, section 6 addresses the unique geometric properties of each billiard system and provides examples.
2. Confocal Families on the Hyperboloid of One Sheet
The three-dimensional Minkowski space is the real 3-dimensional vector space with the symmetric nondegenerate bilinear form
| (2.1) |
Definition 2.1.
For a vector , we say that it is:
-
•
space-like if or ;
-
•
light-like if and ;
-
•
time-like if .
Two vectors and in Minkowski space are orthogonal if . Note that any light-like vector is orthogonal to itself. A line will be called space-like, light-like, or time-like if such is its direction vector.
We take interest in the hyperboloid of one sheet
| (2.2) |
in . The metric
restricted to is a Lorentz metric of constant curvature. Geodesics of this metric are the intersections of and planes through the origin, also called central planes. Such intersections can take the form of plane ellipses, hyperbolas, or straight lines. We call these geodesics space-, time-, and light-like, respectively, as the tangent vectors to these geodesics obey the inequalities stated in Definition 2.1.
The hyperboloid of one sheet is not geodesically connected even though it is a geodesically complete Lorentzian manifold [O’N83, Bee17]. However, we can state specifically when and how two points of can be connected by a geodesic, provided the two points are not antipodal, i.e. distinct points on that are on the same line through the origin.
Proposition 2.2 ([O’N83]).
Let and be distinct nonantipodal points on the hyperboloid of one sheet, , and let be the Minkowski inner product.
-
(i)
If , then and lie on a unique time-like geodesic that is one-to-one;
-
(ii)
If , then and lie on a unique light-like geodesic;
-
(iii)
If , then and lie on a unique space-like geodesic that is periodic;
-
(iv)
If , then and cannot be connected by a geodesic.
Remark 2.3.
Suppose , are antipodal points on , and write . Then there is a family of planes containing the line through and , and as such there is no unique geodesic connecting antipodal points. In fact, infinitely many space-like geodesics connect a point and its antipode.
Consider a cone in
| (2.3) |
and its dual cone
| (2.4) |
for a matrix satisfying . In general, the matrix is not diagonalizable over . However, when the curves of intersection of the hyperboloid and the cone (2.4) bound a compact domain on then (and therefore ) is diagonalizable, which we prove in the following proposition.
Proposition 2.4.
Suppose that all points of the cone (2.4), apart from its vertex, satisfy the inequality . Then is diagonalizable in some orthogonal coordinate system.
Proof.
The proof is similar to the proof of Proposition 1 in [Ves90]. Consider the function . The function is well-defined on and vanishes on , the curves of intersection of the cone and . The cone is the asymptotic cone to , so any cone whose points satisfy must bound one or two compact domains on . As such, must have a maximum or minimum at some point of the domain bounded by . At this point we have or
so that is an eigenvector of . In the orthogonal complement of , , we have two quadratic forms, namely the restrictions of and . The second is positive definite and the result follows from the spectral theorems. ∎
In light of Proposition 2.4, the curves of intersection of the cone and bound either one compact domain and two unbounded domains, or two compact domains and one unbounded domain. We can describe when each of these cases occur in terms of the the entries of .
Definition 2.5.
If the cone divides into one compact domain and two unbounded domains, we call the boundary curves a collared -ellipse. In some orthogonal coordinate system in the collared -ellipse is determined by the equation
| (2.5) |
with . If the cone divides into two compact domains and one unbounded domain, we call the boundary curves a transverse -ellipse. In some orthogonal coordinate system in the transverse -ellipse is determined by equation 2.5 with .
a) 
|
b) 
|
Remark 2.6.
In the case of the transverse -ellipse we choose one of the compact domains. Without loss of generality we can choose the domain with .
In the Klein coordinates , , define the central projection by
Geodesics in the Minkowski metric restricted to are projected to lines in the Klein -plane [Cal07].
If two points lie on the same line through the origin, then
as both will be scalar multiples of the direction vector of . In particular, , so that the projection of the collared -ellipse is a 2-to-1 mapping.
The image of the boundary curves of the collared and transverse -ellipse under the Klein projection has equation
| (2.6) |
where for the collared -ellipse and for the transverse -ellipse. These curves are plane ellipses and hyperbolas, respectively.
Definition 2.7.
The pencil of the cone in is the family of cones of the form
| (2.7) |
The confocal family consists of the dual cone and the corresponding dual cones
| (2.8) |
In [Ves90], the intersection of confocal quadrics with the sphere and one sheet of the hyperboloid of two sheets are studied in detail in -dimensional Euclidean and Minkowski space, respectively. In particular, a factorization method from [MV91] is used for the integration of the billiard problem in the domain on the sphere and hyperboloid bounded by confocal families of quadrics. Further, the dynamics of such billiard systems are described in terms of hyperelliptic curves and -functions.
Definition 2.8.
Denote by the curve of intersection of and the hyperboloid of one sheet . The curves of intersection can be bounded or unbounded, which we call elliptic-type or hyperbolic-type, respectively.
The curves in Figure 2 and the curves projected into the plane in Figure 4 illustrate the previous definition. In particular, the collared and transverse -ellipse each correspond to the curve . The next proposition follows directly from the definition and a direct calculation.
Proposition 2.9.
-
(i)
If , the curve will be of elliptic-type for and will be hyperbolic-type for .
-
(ii)
If , the curve will be of elliptic-type for and will be hyperbolic-type for or .
-
(iii)
For two curves and to intersect they must be of opposite types in the case and must be of the same type in the case .
a) 
|
b) 
|
The confocal family (2.8) can be written in the form
| (2.9) |
For each point , the equation (2.9) has solutions in which we call the generalized Jacobi coordinates of the point .
Proposition 2.10.
Let and .
-
(i)
If , then the equation (2.9) has two real roots in satisfying the inequalities
- (ii)
If then:
-
(iii)
For both cases and : if , then and ;
-
(iv)
For both cases and : if , then and ;
-
(v)
If , then and
Proof.
Let denote the left hand side of (2.9). Combining terms together, the numerator is monic quadratic in and has simple poles at .
Consider the two cases and separately. If , then the discriminant of the numerator of can be written as
| (2.14) |
Each term of the form is positive, so and there will be two distinct roots in . At the pole , the sign of changes from negative to positive while at the poles the sign changes from positive to negative, which shows there is exactly one root satisfying . Further, this implies there cannot be a root between and . We can write the roots as
| (2.15) |
where . The roots are symmetric about where , and so it must be the case that . Because , the only remaining possibility is that . This proves part .
Next, suppose . Because we assume (see remark 2.6), the coordinates uniquely determine . The discriminant of the numerator of can be written as
| (2.16) |
so that terms of the form are positive and can be negative, zero, or positive.
At the pole , changes from negative to positive and at the poles changes from positive to negative. If , then the existence of one root between consecutive poles implies the second root must also be in between the same consecutive poles. This proves cases (2.12), (2.13). The cases of (2.10) and (2.13) follow from a similar argument to that of part , as one can show that if then , and if then , respectively.

The locus of points in the -plane satisfying are two pairs of parallel lines (see figure 3) given by
These lines are tangent to the hyperbola at the foci and are the projection of rulings of connecting the foci (see equation (2.18) in example 2.13). The four lines and this hyperbola divide the region into five regions of interest, depicted in figure 3. By symmetry we can address only the first quadrant and say that cases (2.10), (2.11), (2.12), (2.13), correspond to in regions , , , , respectively. If is in region between the lines then and has no real roots.
Lastly, the cases when follow from a direct calculation. ∎
This proposition is analogous to Proposition 2 of [Ves90] and Theorem 4.5 of [KT09]. However, due to our definition of the confocal family, we do not have the same topological considerations as stated in [KT09].
Because the collared and transverse -ellipse are precisely the curves of intersection with corresponding to the member of the confocal family (2.9) with , we can reduce the previous propositions to a simpler statement in terms of generalized Jacobi coordinates.
Corollary 2.11.
For any in the interior of the collared -ellipse, the generalized Jacobi coordinates of satisfy , . And for any in the interior of the transverse -ellipse, the generalized Jacobi coordinates of satisfy .
From the previous propositions we conclude the following theorem.
Theorem 2.12.
For any point on there are either 0, 1, or 2 confocal conics of the form (2.9) passing through . Further, in the case of two confocal conics, the confocal conics are pairwise orthogonal with respect to the Minkowski inner product .
The orthogonality proof follows from the same argument given in Theorem 4.5 in [KT09].
Example 2.13.
To illustrate properties of the confocal family on , consider the confocal family
| (2.17) |
in . The initial cone with is given by the equation
The foci corresponding to the degenerate case of the confocal family
have coordinates
| (2.18) |
The other sets of degenerate foci corresponding to and , and , respectively, can be calculated similarly. When real, the coordinates of the foci are shown in figure 4. Further, the confocal family has three other degenerate conics: corresponds to the -axis; corresponds to the -axis; and the line at infinity corresponds to .
a) 
|
b) 
|
After this projection onto the plane, the family of curves resembles that of confocal conics in the Minkowski plane . See [BM62, DR12, DR13] for a review of the basic properties. In such a setting, these curves are of the form
| (2.19) |
and are shown in figure 4 for varying . The equations of the four separating lines are easily derived from the four degenerate foci.
3. Billiards on
The study of billiards in pseudo-Euclidean spaces was first discussed in [KT09], while billiards within confocal families in pseudo-Euclidean spaces is discussed in [DR12, DR13].
To begin our examination of billiards on , we interpret the billiard flow in the collared or transverse -ellipse as consisting of tangent vectors which coincide with the geodesic flow on . Suppose a vector hits the boundary at a point and let be the normal vector of , the tangent plane to at . The billiard motion stops if is a singular point, i.e. . If is not a singular point, then is transverse to . Decompose into its normal and tangential components so that its reflection is . Clearly , so the type of the geodesic is preserved under the billiard reflection. In particular, we note that by construction the boundaries of the collared and transverse -ellipses consist entirely of nonsingular points.
Armed with specific criteria for geodesic connectedness on from proposition 2.2, we apply these concepts to billiards inside the collared and transverse -ellipse.
Theorem 3.1.
Let and be two points on the hyperboloid .
-
(i)
If and are nonantipodal points on opposing component curves of the collared -ellipse, then there exists a unique geodesic connecting to . If the geodesic is light- or time-like, the arc of the geodesic from to is contained entirely inside the collared -ellipse. If the geodesic is space-like, then the distance-minimizing arc of the geodesic is contained in the collared -ellipse.
-
(ii)
Let and be distinct points on the same component curve of the collared -ellipse. Then and can either be connected by a space-like geodesic or and cannot be connected by a geodesic. The length-minimizing arc of the space-like geodesic connecting and lies outside the collared -ellipse.
-
(iii)
Let and be distinct points on the transverse -ellipse. Then and can be connected by an arc of a geodesic which stays entirely within the transverse -ellipse.
Proof.
Fix a point on one component curve, , of the collared -ellipse. The plane intersects the collared -ellipse in three distinct points, , , and , where and are on the opposite component curve, , of the collared -ellipse. The plane separates into two disjoint curves, one whose points can be connected to by a time-like geodesic, and the other whose points can be connected to by a space-like geodesic. In the case of the space-like geodesics, the length-minimizing arc of the space-like geodesic will lie between and and represents the billiard trajectory. By construction, the points and are the only points on that can be connected to with a light-like geodesic. Further, every point on satisfies , with equality holding if and only if .
Next, consider which points on can be connected to by a geodesic. The plane intersects the collared -ellipse in three points, namely , , and , where now and are on . The plane divides into two disjoint curves, one whose points can be connected to by a space-like geodesic, and the other whose points cannot be connected to by a geodesic. In the case of the space-like geodesic, the length-minimizing arc that connects the point to will lie outside and represents the billiard trajectory. All points on satisfy with equality holding if and only if .
Lastly, suppose is a point on the transverse -ellipse. The plane intersects the transverse -ellipse in three points , and . Unlike the case of the collared -ellipse, these points are not necessarily distinct. If is a point on the transverse -ellipse that has a light-like tangent, then exactly one of the points or coincides with . The plane separates the transverse -ellipse into two disjoint curves, one of whose points can be connected to by a time-like geodesic and the other whose points can be connected to by a space-like geodesic. In the case of the space-like geodesic, the length-minimizing arc of the geodesic represents the billiard trajectory and lies entirely inside the transverse -ellipse. All points on the transverse -ellipse satisfy . ∎
a) 
|
b) 
|
As noted in the above proof, the existence of odd billiard trajectories on the hyperboloid of one sheet will depend upon which restrictions are placed upon the billiard and whether the billiard is inside or outside the collared or transverse -ellipse.
Corollary 3.2.
-
(i)
Suppose billiard trajectories are required to stay within the collared -ellipse. Then any periodic billiard trajectory in the collared -ellipse must have even period. These trajectories can be space-, light-, or time-like.
-
(ii)
Suppose billiard trajectories are allowed outside the collared -ellipse but are still restricted to motion on . Then all such trajectories are space-like and reflect off of one component curve of the collared -ellipse. Further, periodic trajectories can have even or odd period.
-
(iii)
Billiard trajectories inside the transverse -ellipse can be space-, light-, or time-like. Space- and time-like trajectories can have either even or odd period, while closed light-like trajectories are always even-periodic.
4. Factorization Method of Matrix Polynomials
In [MV91] a method is proposed to determine the integrability of a discrete dynamical system by reducing the problem to the factorization of matrix polynomials. In particular, this approach is applied to a discrete version of rigid body dynamics, discrete dynamics on Stiefel manifolds, and billiards inside an ellipsoid. In [Ves90] this method is used to show the integrability of billiards on the sphere and Lobachevsky space for domains bounded by confocal quadrics. We provide a summary of the technique in below, noting that the statements made below extend to the Minkowski space of arbitrary finite dimension.
It was shown in [MV91] if we start from a certain quadratic matrix polynomial
and its factorization of the form
then the analogous procedure
corresponds to dynamics of the discrete versions of some classical integrable systems, in particular, the billiard dynamics in ellipsoids in .
Let , , and be the successive reflection points in the billiard on and inside the confocal family (2.5):
| (4.1) |
In particular, this means that , , cannot be antipodal points of each other. In the projective Klein model we have the straight lines and , which are in one plane with the normal to the collared or transverse -ellipse (2.6) and form with angles which are equal in the induced metric. See figure 6.

The main point of the factorization method is to find the corresponding matrix polynomial . As is the case with the Lobachevsky space and the sphere, in our case is linear:
| (4.2) |
where the bivector
is the skew-symmetric operator in . The norm squared of this bivector
is the area of the parallelogram generated by and in .
After two steps the factorization procedure leads to the transformation , which corresponds to the billiard dynamics . The arguments of [Ves90] carry over to the hyperboloid of one sheet, and the result is stated in the theorem below.
Theorem 4.1.
Let be an orbit in the billiard problem in the collared or transverse -ellipse domain of , which in the projective representation in is determined by the equation . Choose the vectors in such a way that is constant. Then the matrix
undergoes the isospectral transformation
| (4.3) |
where
| (4.4) |
Here and are tangent vectors to the trajectory at the reflection point as shown in figure 6.
The relations (4.3) and (4.4) follow from the previous considerations but can be checked also by straightforward calculation.
Corollary 4.2.
The billiard in the collared and transverse -ellipse has the following integrals
| (4.5) |
which satisfy the unique relation
and is given by the signature of the metric in .
The corollary follows from Theorem 4.1 and the formula
| (4.6) |
where
| (4.7) |
One can show that these integrals are in involution with respect to the natural symplectic structure. Therefore, this billiard problem is integrable in the sense of Liouville.
a) 
|
b) 
|
c) 
|
d) 
|
Remark 4.3.
The matrix factorization algorithm of Veselov is blind to the discussion of geodesics from Section 3. At the start, the points and must satisfy equation (4.1) and be nonantipodal points on . But consider two points , on the same component curve of the collared -ellipse such that and cannot be connected by a geodesic on (i.e. ). The algorithm produces the next collision point on for the billiard dynamics of . Because the reflection law preserves the type of geodesic, the points and also cannot be connected by a geodesic on (i.e. ), and hence all successive points produced from the algorithm cannot be connected by a geodesic on . However, a valid trajectory whose collision points can be connected by geodesics can be recovered from this strange situation: starting with the pair the algorithm produces the same (now valid) reflection point , so the billiard dynamics are ! As , it must be the case that , and so these points can be connected by time- or light-like geodesics. Moreover, both the invalid and valid billiard trajectories project to the same billiard in Klein coordinates because the projection maps antipodal points to the same point. This discussion proves the following proposition.
Proposition 4.4.
Suppose
is a sequence of billiard reflections of the collared -ellipse produced by the Veselov matrix factorization algorithm. Further suppose so that the initial points (and hence all successive points) cannot be connected by geodesics on . Then the sequence
is a sequence of billiard reflections of the collared -ellipse produced by the matrix factorization algorithm, all of whose points can be connected by time- or light-like geodesics on . Moreover, both billiard sequences project to the same trajectory in Klein coordinates.
Let be the alternating antipodal map whose image is described in the proposition above. This map sends a sequence of billiard collisions to a sequence where every other point has been sent to its antipode:
As discussed above, we will only need to consider this map in the case of the collared -ellipse. Clearly is an involution on the space of sequences of billiard collisions. Proposition 4.4 tells us that the map can turn an invalid sequence of billiard collisions to a valid sequence of billiard collisions whose billiard trajectories are time- or light-like. The reverse is also true, though not of interest. What is of interest are the images of space-like trajectories under this map. As the map sends trajectories which reflect off of exactly one component curve to trajectories which alternate reflecting off of each component curve (or vice-versa), space-like trajectories inside the collared -ellipse will be mapped one-to-one to space-like trajectories outside the collared -ellipse. Of particular interest is when such trajectories are periodic.
Theorem 4.5.
-
(i)
Suppose is a space-like -periodic billiard trajectory inside the collared -ellipse. Then the image of this sequence of collisions under the alternating antipodal map is either a - or -periodic trajectory outside the collared -ellipse.
-
(ii)
If is a space-like -periodic billiard trajectory outside the collared -ellipse, then the image of this sequence of collisions under the map is a -periodic orbit inside the collared -ellipse.
-
(iii)
If is a space-like -periodic billiard trajectory outside the collared -ellipse, then the image of two concatenated copies of this sequence of collisions under the map is a -periodic orbit inside the collared -ellipse.
a) 
|
b) 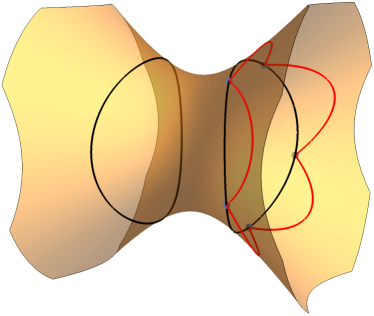
|
5. Spectral Curves, Cayley’s Condition, and Periodic Orbits
Consider the spectral curve given by equation (4.6), which can be rewritten in the following way
| (5.1) |
Using equations (4.6) and (4.7) this can be reformulated as
| (5.2) |
where
and is the root of equation (4.7), .
Proposition 5.1.
Let . Then has exactly one real root. This root can be written explicitly as
| (5.3) |
where are the components of the points . In particular, the straight line on the hyperboloid of one sheet is tangent to the confocal conic (2.9) corresponding to . This property and the equation for are preserved under the map .
Knowing the degree of now allows us to prove the theorem below, an analogue of a well-known theorem in Euclidean and pseudo-Euclidean geometry.
Theorem 5.2.
All segments of the billiard trajectory in the collared and transverse -ellipse are tangent to the same confocal conic corresponding to . This caustic is fixed for a given trajectory and is invariant under the map .
The proof of this is similar to that of Theorem 3 in [Ves90], though with the appropriate adjustments due to Propositions 2.10 and 5.1.
The work of [Ves90, MV91, DJR03] and others describe how to use the factorization procedure outlined in the previous section to compute eigenvectors of along with other spectral properties. We provide a brief summary below.
Let be a point of with and let be the “infinities” for . The eigenvector of normalized by the condition is the meromorphic vector function on with pole-divisor of degree , where is the genus of . By Theorem 4.3 we can express the eigenvector of in terms of by
| (5.4) |
Thus has two new poles and a new double zero at the point corresponding to . This means the pole-divisor of can be written as
| (5.5) |
where , where has coordinates , . The equivalence is given by the function . This shift in the divisor on corresponds to the points of reflection from the boundary in our billiard system. This is in fact Theorem 2 of [Ves90], that the dynamics of the collared and transverse -ellipse billiard problem correspond to the shift (5.5) on the Jacobi variety of the elliptic curve (5.1).
Given a periodic billiard trajectory in the collared or transverse -ellipse, it is known that trajectories with the same caustics have the same spectral curve. Thus the trajectory is of period if and only if on the Jacobi variety . This proves the existence of a Poncelet-like result in this setting.
Proposition 5.3.
Given a periodic billiard trajectory in the collared or transverse -ellipse, any billiard trajectory which shares the same caustic is also periodic with the same period.
The work of Cayley (see [Cay54, Cay61], amongst many others) in the century and Griffiths and Harris [GH77] in the 1970’s on the Poncelet Theorem lead to analytic conditions relating the period of a billiard trajectory to its caustics. Dragović and Radnović have proved such conditions for a Poncelet theorem the ellipsoid in [DR98a, DR98b] and in Lobachevsky space [DJR03]. In particular, the techniques used apply here.
Lemma 5.4 ([DJR03]).
Suppose the hyperelliptic curve is of the form
with distinct nonzero , is the genus of , and and represent two points on over the point . Then is equivalent to
for where is the Taylor expansion around the point .
Introduce the variable change , . This transforms equation (5.2) into
| (5.6) |
where and is the lone root of described in proposition 5.1.
Theorem 5.5.
The billiard trajectories in the collared and transverse -ellipse with nondegenerate caustic are -periodic if and only if
| (5.7) | ||||
| (5.8) |
on the elliptic curve (5.6), with being two points on the curve over and is a point over .
Proof.
Let where . Recall that every generic point on the hyperboloid of one sheet has two generalized Jacobi coordinates which satisfy inequalities outlined in proposition 2.10.
First consider the case of the collared -ellipse, which we denote by . The generalized Jacobi coordinates satisfy . By Proposition 2.9, the curve will be of elliptic-type for and will be hyperbolic-type for . Geometrically, corresponds to the reflection of the trajectory off of the collared -ellipse, ; corresponds to the trajectory crossing the plane (which is also the plane of symmetry of the ); and correspond to the trajectory crossing the and planes, respectively.
There are three possibilities for types of trajectories:
-
(1)
The caustic is of elliptic type outside of and the billiard is within . Then and . There is no caustic inside , and will take on the value 0 at each reflection point. Each coordinate plane must be crossed an even number of times.
-
(2)
The caustic is of elliptic type outside of and the billiard is outside of . Then in accordance with the discussion in section 3, the billiard trajectories are space-like and all reflect off of one component of . Then and . The billiard moves between the one component of and the caustic, will not cross the coordinate plane , but must cross the coordinate planes and an even number of times. This is the only case which could have an odd period.
-
(3)
The caustic is of hyperbolic type and the billiard is inside . Then the caustic is symmetric about the plane and , so that . The trajectory must become tangent to the caustic at some point inside .
In each case above, the parameters change monotonically between the endpoints of the specified intervals.
Following Jacobi [Jac84] consider the following differential equation along a billiard trajectory:
| (5.9) |
Let be a point over of the elliptic curve (5.6) and are the points at infinity. The points , , , and are all branching points and hence . For a period trajectory, integrating the above equation along the trajectory leads to
via the Abel map. Each must be even except for possibly and . Using the equivalence and letting , these three conditions reduce to
Writing or proves the theorem in the case of the collared -ellipse.
Next, consider the case of the transverse -ellipse which we denote by . The generalized Jacobi coordinates now satisfy . Again by proposition 2.9, if or , then will be of hyperbolic type and will not intersect ; if then will be of elliptic type and intersect ; if , then will be of elliptic type but it will not intersect ; and if then is degenerate and will be a hyperbola, a circle, or a hyperbola in the planes , , and , respectively (though the last case will not affect the billiard in ). Both of the possible degenerate cases will intersect in two places each, and represent the two “diameters” of .
There are three possibilities for trajectories in :
-
(1)
The caustic is of hyperbolic type or elliptic type and does not intersect . Then or (hyperbolic type) or (elliptic type), and . At each reflection point one coordinate takes on the value 0. They can both equal to 0 only at the four points where has a light-like tangent. At these points the reflection is counted twice. On a closed trajectory the number of reflections is equal to the number of crossings of the planes and , and there must be an even number of crossings of the coordinate planes.
-
(2)
The caustic is of elliptic type and has a nonempty intersection with and . Then . The caustic is oriented along the plane and the trajectory must cross the plane an even number of times.
-
(3)
The caustic is of elliptic type and has a nonempty intersection with and . Then . The caustic is oriented along the plane and the trajectory must cross the plane an even number of times.
Repeating similar calculations as the case of the collared -ellipse leads to the same two divisor conditions, (5.7) and (5.8). ∎
Theorem 5.6.
Consider a billiard trajectory in the collared or transverse -ellipse. The trajectory is -periodic with period if and only if
| (5.10) |
The trajectory is -periodic with period if and only if
| (5.11) |
For each case,
and
are the Taylor expansions around with . Furthermore, the only 2-periodic trajectories are contained in the planes of symmetry.
Proof.
Using theorem 5.5 we consider the even and odd cases separately. If then lemma 5.4 with applies directly, proving the condition (5.10). If , the divisor condition (5.8) is equivalent to the existence of a meromorphic function with a pole of order at , a simple pole at , and a unique zero of order at . One basis of the space of such functions is
| (5.12) |
where
| (5.13) |
and the coefficients are given in the statement of the theorem. The existence of such a function is equivalent to condition (5.11). ∎
As is noted in [DJR03], adjustments to the proofs of the previous two theorems can be made to allow the case when the elliptic curve (5.2) has singularities (i.e. when the constants and root of are not distinct).
Remark 5.7.
Theorem 5.6 provides an analytical condition for trajectories in the collared and transverse -ellipse. In the case of the collared -ellipse, there is a caveat to the interpretation of these periodic trajectories. As the collared -ellipse has two components curves, any periodic trajectory inside the collared -ellipse must have even period, but a periodic trajectory outside the collared -ellipse can have odd period (see theorem 3.1 and corollary 3.2). That is, the condition given by (5.11) will produce a trajectory with period or if the motion is on the interior or exterior of the collared -ellipse, respectively. Both cases will project to a trajectory with period in the Klein coordinates .
We also note equation (5.4) is invariant with respect to symmetries in the coordinate planes of the vectors , , and which represent motion. As such, closed trajectories will be unique up to those symmetries.
In [DR12, DR13], periodic light-like trajectories inside ellipses in the Minkowski plane are studied. We may also consider the previous two theorems in the special case of light-like trajectories. On , a general light-like trajectory is a member of one of two families of generatrices. Upon reflection from the boundary of the collared or transverse -ellipse, the billiard trajectory will switch from one family to the other. Thus to be periodic, light-like trajectories must be of even period, and we only need to consider condition (5.10) in this context. As light-like trajectories have a caustic at , we arrive at a similar theorem.
Theorem 5.8.
Consider a light-like billiard trajectory in the collared or transverse -ellipse. The trajectory is -periodic for if and only if
| (5.14) |
where
is the Taylor expansion around and .
6. Geometric Consequences and Examples
6.1. The Collared -Ellipse
Consider the hyperboloid of one sheet in with . The two component curves of the collared -ellipse can be parametrized as
This is projected into the Klein coordinates as
| (6.1) |
The projection is a double cover of the ellipse in the -plane. Any period trajectory in the -plane can correspond to either a period or period trajectory on the hyperboloid of one sheet.
a) 
|
b) 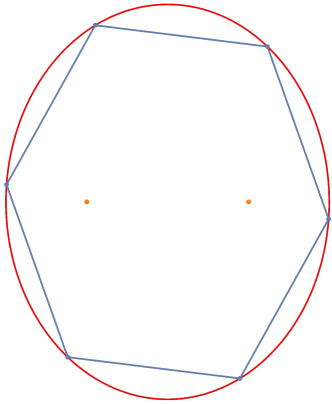
|
An interesting geometric consequence due to the projection into Klein coordinates is that the ellipse (6.1) should have foci at in the standard Euclidean sense, however the projected trajectories produce caustics which are confocal around the points . See figure 7b.
The caustic of a periodic trajectory can be of elliptic- or hyperbolic-type. The curve projects into Klein coordinates as
| (6.2) |
which are Euclidean ellipses and hyperbolas (oriented along the -axis) for and , respectively. In addition, for the hyperboloid of one sheet and the cone do not intersect (i.e. ), but the curve above will still be an elliptical caustic for the projected billiard trajectory.
Corollary 6.1.
Consider the billiard in the collared -ellipse.
-
(i)
Once projected into Klein coordinates , the billiard table is itself an ellipse and the projection of the caustic curves preserves the type of curve.
-
(ii)
A trajectory inside the collared -ellipse stays in the region (after suitable change of coordinates, if necessary) if and only if the trajectory projected into the Klein coordinates has a hyperbolic caustic.
-
(iii)
Any trajectory in the Klein ellipse that passes through one focus will upon reflection pass through the other focus.
Property (3) of billiards is well-known [Tab05] and was shown to also be true in [Ves90] for the cases of one sheet of the hyperboloid of two sheets and spherical billiards once projected into Klein coordinates.
Another related corollary is an extension of the “string construction” of the Euclidean ellipse, given by Graves [Ber87].
Theorem 6.2 (Graves).
Given an ellipse and a closed piece of string with length strictly greater than the perimeter of , the locus of a pencil used to pull the string taut around is another ellipse, , confocal with .
Corollary 6.3.
The Graves’ Theorem also applies to the collared -ellipse once projected into the Klein coordinates . Moreover, the ellipse can be determined geometrically as the locus of all points satisfying
for fixed foci , constant , and is the distance on the hyperboloid of one sheet in Klein coordinates.
It is a quick exercise in differential geometry to see that the square of the arc length differential in can be written in Klein coordinates as
This expression is just the negative of the square of the arc length differential of the Lobachevskian metric (i.e. ).
6.2. The Transverse -Ellipse
Consider the hyperboloid of one sheet with . The transverse -ellipse can be parametrized as
This is projected into the Klein coordinates as
| (6.3) |
though it should be noted that each of the two curves in project to two disjoint halves of the branches of the hyperbola (6.3). The equation of the projected caustics (6.2) again preserves the type of the caustic curve .
a) 
|
b) 
|
Billiards in this Klein model look far different than the previous example. The billiard trajectory may reflect from one branch of the hyperbola to the other or it can travel only along a single branch. A further disadvantage of this model is that points whose coordinate have opposite signs and are near the plane are projected to points that are far away from one another in the -plane (i.e. ) which make periodic orbits hard to visually identify. For example, there is a 4-periodic orbit in the transverse -ellipse which consists of the following points
However the second and fourth points are projected to the point at infinity in the Klein model, see figure 10.
6.3. Periodic Trajectories from the Cayley Condition
Let the matrix . The conditions (5.10) and (5.11) can be used to classify periodic trajectories in terms of the parameters and the caustic parameter .
Example 6.4 (3-periodic trajectories).
The condition (5.11) for a period 3 trajectory is for . This is equivalent to
which has solutions
This condition works for the transverse -ellipse but if the two component curves of the collared -ellipse are sufficiently far apart there cannot be a period 3 trajectory outside the collared -ellipse due to the corresponding points not being geodesically connectable. In such a case, the condition above will produce period 6 trajectories inside the collared -ellipse by using the map.
a) 
|
b) 
|
Example 6.5 (4-Periodic trajectories).
The condition (5.10) for 4-period trajectories is , which is equivalent to
The numerator is cubic in and has roots
Using definition 2.5, we can state specifically when these roots are defined. In the case of the collared -ellipse, the denominators of will never vanish. The denominator of will vanish if for . In the case of the transverse -ellipse, the denominator of will vanish if . The denominators of will never vanish.
a) 
|
b) 
|
In both of the above cases, vanishing denominators correspond to 4-periodic light-like trajectories which are tangent to the caustic at infinity, . This is consistent with the condition from (5.14).
Example 6.6 (5-periodic trajectories).
The condition is equivalent to finding the roots of a degree 6 polynomial in . Its simplest expression is given in terms of the elementary symmetric polynomials in 3 variables, :
In the collared -ellipse with , this produces four real roots and two imaginary roots:
In the transverse -ellipse with , this produces four real roots and two imaginary roots:
a) 
|
b) 
|
Example 6.7 (6-periodic trajectories).
The condition for a time- or space-like period 6 orbit from (5.10) is that . This is equivalent to
The first quadratic has discriminant which is positive for the collared -ellipse and negative for the transverse -ellipse. The roots are given by
The second quadratic in the product above is equivalent to , so it produces period 3 trajectories. The third quadratic has discriminant which is positive for both the collared and transverse -ellipse. The roots are given by
The fourth quadratic has discriminant which is negative for the collared -ellipse and positive for the transverse -ellipse. The roots are given by
In the collared -ellipse with , the six real roots are
In the case of the transverse -ellipse with , the six real roots are
a) 
|
b) 
|
Both of the cases include the degenerate conic corresponding to , though this conic is contained in different coordinate hyperplanes in each case.
The condition for a light-like period 6 trajectory from (5.14) is that . This is equivalent to
In the case of the collared -ellipse, this has two solutions in terms of , , and . One solution is
and the other is
In the case of the transverse -ellipse, there are two solutions in terms of , , and . One solution is
and the other solution is
These conditions are equivalent to the cases when the denominators of above could possibly vanish.
With the above conditions, a light-like period 6 trajectory will occur when the initial points and can be connected by a light-like geodesic that stays inside the collared or transverse -ellipse.
a) 
|
b) 
|
Acknowledgements
This research is supported by the Discovery Project No. DP190101838 Billiards within confocal quadrics and beyond from the Australian Research Council. Research of M. R. is also supported by Mathematical Institute SANU, the Ministry of Education, Science and Technological Development of the Republic of Serbia, and the Science Fund of Serbia.
References
- [Bee17] J. K. Beem, Global Lorentzian Geometry, Routledge, September 2017.
- [Ber87] M. Berger, Geometry, Universitext, Geometry, Springer-Verlag, Berlin Heidelberg, 1987.
- [Bir27] G. Birkhoff, Dynamical Systems, American Mathematical Society / Providence, RI, American Mathematical Society, 1927.
- [BM62] G. Birkhoff and R. Morris, Confocal conics in space-time, The American Mathematical Monthly 69 (1962), no. 1, 1–4.
- [Cal07] R. G. Calvet, Treatise of Plane Geometry Through Geometric Algebra, R. González, 2007.
- [Cay54] A. Cayley, Developments on the porism of the in-and-circumscribed polygon, The London, Edinburgh, and Dublin Philosophical Magazine and Journal of Science 7 (1854), no. 46, 339–345.
- [Cay61] by same author, On the porism of the in-and-circumscribed polygon, Philosophical Transactions of the Royal Society of London 151 (1861), 225–239.
- [DJR03] V. Dragović, B. Jovanović, and M. Radnović, On elliptical billiards in the Lobachevsky space and associated geodesic hierarchies, Journal of Geometry and Physics 47 (2003), no. 2-3, 221–234.
- [DR98a] V. Dragović and M. Radnović, Conditions of cayley’s type for ellipsoidal billiard, Journal of Mathematical Physics 39 (1998), no. 1, 355–362.
- [DR98b] by same author, On periodical trajectories of the billiard systems within an ellipsoid in and generalized cayley’s condition, Journal of Mathematical Physics 39 (1998), no. 11, 5866–5869.
- [DR12] by same author, Ellipsoidal billiards in pseudo-Euclidean spaces and relativistic quadrics, Advances in Mathematics 231 (2012), no. 3-4, 1173–1201.
- [DR13] by same author, Minkowski plane, confocal conics, and billiards, Publ Inst Math (Belgr) 94 (2013), no. 108, 17–30.
- [GH77] P. Griffiths and J. Harris, A poncelet theorem in space, Commentarii Mathematici Helvetici 52 (1977), no. 1, 145–160.
- [GTK07] D. Genin, S. Tabachnikov, and B. Khesin, Geodesics on an ellipsoid in Minkowski space, L’Enseignement Mathématique (2007), 307–331 (en).
- [Jac84] C. G. J. Jacobi, Vorlesungen Über dynamik. gesammelte werke, supplementband, Berlin, 1884.
- [KT91] V. V. Kozlov and D. V. Treshchëv, Billiards, Translations of Mathematical Monographs, vol. 89, American Mathematical Society, Providence, RI, 1991, A genetic introduction to the dynamics of systems with impacts, Translated from the Russian by J. R. Schulenberger. MR 1118378
- [KT09] B. Khesin and S. Tabachnikov, Pseudo-Riemannian geodesics and billiards, Advances in Mathematics 221 (2009), no. 4, 1364–1396.
- [MV91] J. Moser and A. P. Veselov, Discrete versions of some classical integrable systems and factorization of matrix polynomials, Commun.Math. Phys. 139 (1991), no. 2, 217–243.
- [O’N83] B. O’Neill, Semi-riemannian geometry : with applications to relativity, Pure and applied mathematics ; 103., Academic Press, New York, 1983 (eng).
- [Tab05] S. Tabachnikov, Geometry and Billiards, Student mathematical library, American Mathematical Society, 2005.
- [Ves90] A. P. Veselov, Confocal surfaces and integrable billiards on the sphere and in the Lobachevsky space, Journal of Geometry and Physics 7 (1990), no. 1, 81–107.
- [VW20] A. P. Veselov and L. Wu, Geodesic scattering on hyperboloids and Knörrer’s map, arXiv:2008.12524 [math.DG] (2020), 1–27.