Property (QT) for 3-manifold groups
Abstract.
According to Bestvina-Bromberg-Fujiwara, a finitely generated group is said to have property (QT) if it acts isometrically on a finite product of quasi-trees so that orbital maps are quasi-isometric embeddings. We prove that the fundamental group of a compact, connected, orientable 3-manifold has property (QT) if and only if no summand in the sphere-disc decomposition of supports either Sol or Nil geometry. In particular, all compact, orientable, irreducible 3-manifold groups with nontrivial torus decomposition and not supporting Sol geometry have property (QT). In the course of our study, we establish property (QT) for the class of Croke-Kleiner admissible groups and of relatively hyperbolic groups under natural assumptions has property (QT).
1. Introduction
1.1. Background and Motivation
The study of group actions on quasi-trees has recently received a great deal of interest. A quasi-tree means here a possibly locally infinite connected graph that is quasi-isometric to a simplicial tree. Groups acting on (simplicial) trees have been well-understood thanks to the Bass-Serre theory. On the one hand, quasi-trees have the obvious advantage of being more flexible; hence, many groups can act unboundedly on quasi-trees but act on any trees with global fixed points. Many hyperbolic groups with Kazhdan’s property (T), mapping class groups among many other examples belong to this category (see [Man05, Man06] for other examples). In effect, these are sample applications of a powerful axiomatic construction of quasi-trees proposed in the work of Bestvina, Bromberg and Fujiwara [BBF15]. This construction will be fundamental in this paper.
We say that a finitely generated group G has property (QT) if it acts isometrically on a finite product of quasi-trees with -metric so that for any basepoint , the induced orbit map
is a quasi-isometric embedding of equipped with some (or any) word metric to . Informally speaking, property (QT) gives an undistorted picture of the group under consideration in a reasonably good space. Here, the direct product structure usually comes from the independence of several negatively curved layers endowed on the group. Such a hierarchy structure has emerged from the study of mapping class groups since Masur-Minsky [MM00]. In addition, property (QT) is a commensurability invariant in [BBF19, But20] and could be thought of as a stronger property than the finiteness of asymptotic dimension.
Extending their earlier results of [BBF15], Bestvina, Bromberg and Fujiwara [BBF19] recently showed that residually finite hyperbolic groups and mapping class groups have property (QT). It is known that Coxeter groups have property (QT) (see [DJ99]), and thus every right-angled Artin group has property (QT) (see [BBF19, Induction 2.2]).
In 3-manifold theory, the study of the fundamental groups of 3-manifolds is one of the most central topics. Determining property (QT) of finitely generated 3-manifold groups is the main task of the present paper.
1.2. Property (QT) of 3-manifold groups
Let be a 3-manifold with finitely generated fundamental group. Since property (QT) is a commensurability invariant, we can assume that is compact and orientable by considering the Scott core of and a double cover of (if is non-orientable).
In recent years, the theory of special cube complexes [HW08] has led to a deep understanding of 3-manifold groups [Wis20] [Ago13]. By definition, the fundamental group of a compact special cube complex is undistorted in a right-angled Artin group, and then has property (QT) by [DJ99]. However, 3–manifolds without non-positively curved Riemannian metrics cannot be cubulated by [PW18] and certain cubulated –manifold groups are not virtually cocompact special (see [HP15], [Tid18]). Thus it was left open to determine the property (QT) for all 3-manifold groups.
By the sphere-disc decomposition, a compact oriented 3-manifold is a connected sum of prime summands with incompressible boundary. It is an easy observation that if a group has property (QT) then every non-trivial element is undistorted (see Lemma 2.5), and hence if supports or from the eight Thurston geometries, then fails to have property (QT). Our first main result is the following characterization of property (QT) for all 3-manifolds.
Theorem 1.1.
Let be a connected, compact, orientable 3-manifold. Then has property (QT) if and only if no summand in its sphere-disk decomposition supports either or geometry.
By standard arguments, we are reduced to the case where is a compact, connected, orientable, irreducible 3-manifold with empty or tori boundary. Theorem 1.1 actually follows from the following theorem.
Theorem 1.2.
Let be a compact orientable irreducible 3-manifold with empty or tori boundary, with nontrivial torus decomposition and that does not support the Sol geometry. Then has property (QT).
A 3-manifold as in Theorem 1.2 is called a graph manifold if all the pieces in its torus decomposition are Seifert fibered spaces; otherwise is called a mixed manifold. It is well-known that the fundamental group of a mixed 3-manifold is hyperbolic relative to a collection of abelian groups and graph manifolds groups. To prove Theorem 1.2, we actually determine the property (QT) of Croke-Kleiner admissible groups, and of relatively hyperbolic groups that will be discussed in detail in the following subsections. These results include but are much more general than the fundamental groups of graph manifolds and mixed manifolds.
1.3. Property (QT) of Croke-Kleiner admissible groups.
We first address property (QT) of graph manifolds. Our approach is based on a study of a particular class of graph of groups introduced by Croke and Kleiner [CK02] which they called admissible groups and generalized the fundamental groups of graph manifolds. We say that an admissible group is a Croke-Kleiner admissible group or a CKA group if it acts properly discontinuous, cocompactly and by isometries on a complete proper CAT(0) space . Such action is called a CKA action and the space is called a CKA space. The CKA action is modeled on the JSJ structure of graph manifolds where the Seifert fibration is replaced by the following central extension of a general hyperbolic group :
| (1) |
where It is worth pointing out that CKA groups encompass a much more general class of groups and can be used to produce interesting groups by a “flip” trick from any finite number of hyperbolic groups (see Example 2.14).
The notion of an omnipotent group was introduced by Wise in [Wis00] and has found many applications in subgroup separability. We refer the reader to Definition 4.6 for its definition and note here that free groups [Wis00], surface groups [Baj07], and the more general class of virtually special hyperbolic groups [Wis20] are omnipotent. In [NY], Nguyen-Yang proved property (QT) for a special class of CKA actions under flip conditions (see Definition 2.18). One of the main contributions of this paper is to remove this assumption and prove the following result in full generality.
Theorem 1.3.
Let be a CKA action where for every vertex group the central extension (1) has omnipotent hyperbolic quotient group. Then has property (QT).
Remark 1.4.
It is a long-standing problem whether every hyperbolic group is residually finite. Wise noted that if every hyperbolic group is residually finite, then any hyperbolic group is omnipotent (see Remark 3.4 in [Wis00]).
Let us comment on the relation of this work with the previous [NY]. As in [NY], the ultimate goal is to utilize Bestvina-Bromberg-Fujiwara’s projection complex machinery to obtain actions on quasi-trees. The common starting point is the class of special paths developed in [NY] that record the distances of . However, the flip assumption (see Definition 2.18) on CKA actions was crucially used there: the fiber lines coincide with boundary lines in adjacent vertex pieces when crossing the boundary plane, roughly speaking. Hence, a straightforward gluing construction works in that case but fails in our general setting. In this paper, we use a completely different projection system to achieve the same purpose with a more delicate analysis.
It is worth mentioning the following fact frequently invoked by many authors: any graph manifolds are quasi-isometric to some flip ones (see [KL98]). This simplification, however, is useless to address property (QT), as such a quasi-isometry does not respect the group actions. Conversely, our direct treatment of any graph manifolds (closed or with nonempty boundary) is new, and we believe it will potentially allow for further applications.
We now explain how we apply Theorem 1.3 to graph manifolds. If is a graph manifold with nonempty boundary then it always admit a Riemannian metric of nonpositive curvature (see [Lee95]). In particular, is a CKA action, and thus property (QT) of follows immediately from Theorem 1.3. However, closed graph manifolds may not support any Riemannian metric of nonpositive curvature (see [Lee95]), so property (QT) in this case does not follow immediately from Theorem 1.3. We have to make certain modifications on some steps to run the proof of Theorem 1.3 for closed graph manifolds (see Section 8.2.1 for details).
1.4. Property (QT) of relatively hyperbolic groups.
When is a mixed 3–manifold, then is hyperbolic relative to the finite collection of fundamental groups of maximal graph manifold components, isolated Seifert components, and isolated JSJ tori (see [BW13], [Dah03]). Therefore, we need to study property (QT) for relatively hyperbolic groups.
Our main result in this direction is a characterization of property (QT) for residually finite relatively hyperbolic groups, which generalizes the corresponding results of [BBF19] on Gromov-hyperbolic groups.
Theorem 1.5.
Suppose that a finitely generated group is hyperbolic relative to a finite set of subgroups . Assume that each acts by isometry on finitely many quasi-trees so that the induced diagonal action on has property (QT). If is residually finite, then has property (QT).
Remark 1.6.
Since maximal parabolic subgroups are undistorted, each obviously has property (QT) if has property (QT). A non-equivariant version of this result was proven by Mackay-Sisto [MS13].
Remark 1.7.
It is well-known that mixed 3-manifold groups are hyperbolic relative to a collection of abelian groups and graph manifold groups . However, it is still insufficient to derive directly via Theorem 1.5 the property (QT) of from that of graph manifold groups asserted in Theorem 1.3, since may not preserve factors in the finite product of quasi-trees. Of course, passing to an appropriate finite index subgroup preserves the factors, but it is not clear at all whether are peripheral subgroups of a finite index subgroup of . In order to find such a , a stronger assumption must be satisfied so that every finite index subgroup of each is separable in . This requires the notion of a full profinite topology induced on subgroups (see the precise definition before Theorem 3.5 and a relevant discussion in [Rei18]). See Theorem 3.5 for the precise statement. In the setting of a mixed 3-manifold, Lemma 8.5 verifies that each peripheral subgroup of satisfies this assumption. Therefore, all mixed 3-manifolds are proven to have property (QT).
We now explain a few algebraic and geometric consequences for groups with property (QT).
Similar to trees, any isometry on quasi-trees must be either elliptic or loxodromic ([Man05]). Hence, if a finitely generated group acts properly (in a metric sense) on finite products of quasi-trees, then every non-trivial element is undistorted (Lemma 2.5). Moreover, property (QT) allows to characterize virtually abelian groups among sub-exponential growth groups and solvable groups.
Theorem 1.8.
Let be a finitely generated group. Then the following statements hold.
-
(1)
Assume that has sub-exponential growth. Then has property (QT) if and only if is virtually abelian.
-
(2)
Suppose that is solvable with finite virtual cohomological dimension. Then has property (QT) if and only if it is virtually abelian.
By Theorem 1.5, this yields as a consequence that non-uniform lattices in and for fail to act properly on finite products of quasi-trees.
Corollary 1.9.
A non-uniform lattice in for or for does not have property (QT), while any lattice of has property (QT) for .
Overview
The paper is structured as follows. In Section 2, we recall the preliminary materials about Croke-Kleiner admissible groups, axiomatic constructions of quasi-trees, and collect a few preliminary observations to disprove property (QT) for Sol and Nil geometries and to prove Theorem 1.8. Section 3 contains a proof of Theorem 1.5 and its variant Theorem 3.5. The next four sections aim to prove Theorem 1.3: Section 4 first recalls a cone-off construction of CKA actions from [NY] and then outlines the steps executed in Sections 5, 6, and 7 to prove property (QT) for CKA actions. Sections 5 and 6 explain in detail the construction of projection systems of fiber lines and then prove the corresponding distance formula. We finish the proof of Theorem 1.3 in Section 7. In Section 8, we present the applications of the previous results for 3-manifold groups and prove Theorem 1.2 and Theorem 1.1.
Acknowledgments
H.T.Nguyen is partially supported by Project ICRTM04_2021.07 of the International Centre for Research and Postgraduate Training in Mathematics, Vietnam. W. Y. is supported by National Key R & D Program of China (SQ2020YFA070059) and National Natural Science Foundation of China (No. 12131009). We are also grateful to the anonymous referee for many very helpful comments.
2. Preliminary
This section reviews concepts property (QT), Croke-Kleiner admissible actions, and the construction of quasi-trees. Several observations are made to determine property (QT) of 3-manifolds with Sol and Nil geometry. This includes the fact that every elements are undistorted in groups with property (QT) and some attempts to characterize by property (QT) the class of virtually abelian groups in solvable/sub-exponential growth groups.
In the sequel, we use the notion if the exists such that , and if and . Also, when we write we mean that . If the constant is universal from context, the sub-index shall be omitted.
2.1. Property (QT)
Definition 2.1.
We say that a finitely generated group G has property (QT) if it acts isometrically on finite products of quasi-trees with -metric so that for any basepoint , the induced orbit map
is a quasi-isometric embedding of equipped with some (or any) word metric to with the product metric .
Remark 2.2.
A group with property (QT) acts properly on finite products of quasi-trees in a metric sense: as . We would emphasize that all consequences of the property (QT) in this paper use merely the existence of a metric proper action.
By definition, a quasi-tree is assumed to be a graph quasi-isometric to a simplicial tree. This does not loss generality as any geodesic metric space (with an isometric action) is quasi-isometric to a graph (with an equivariant isometric action) by taking the 1-skeleton of its Rips complex: the vertex set consists of all points and two points with distance less than 1 are connected by an edge.
The first part of the following lemma allows one to pass to finite index subgroups in the study Property (QT) of groups, as explained in Section 2.2 of [BBF19]. The second part of Lemma 2.3 is an immediate consequence of the definition of property (QT).
Lemma 2.3.
-
(1)
Let be a finite index subgroup of . Then has property (QT) if and only if has property (QT).
-
(2)
Let be an undistorted subgroup of . Suppose that has property (QT) then has property (QT).
Below is a corollary of the de Rham decomposition theorem (see [FL08, Theorem 1.1]) that will be used for the next discussions.
Corollary 2.4.
A finite product of quasi-trees must have de Rham decomposition
if the first quasi-trees () are all real lines among .
A finite product of quasi-trees has no -factor if no is isometric to or a point. In this case, the Euclidean factor will disappear. In what follows, we give some general results about groups with property (QT).
Lemma 2.5.
Assume that has property (QT). Then the subgroup generated by an element is undistorted in .
Proof.
Let be the de Rham decomposition of a finite product of quasi-trees. By [FL08, Corollary 1.3], up to passage to finite index subgroups, acts by isometry on each factor and for . Let be an infinite order element. If the image of is an isometry on the Euclidean space , then it either fixes a point or preserves an axe. If the image of is an isometry on a quasi-tree then by [Man06, Corollary 3.2], it has either a bounded orbit or a quasi-isometrically embedded orbit.
Fix a basepoint . If the action of on is proper, by the first paragraph, there must exist a unbounded action of on some factor or , so we have for some . Since any isometric orbital map is Lipschitz, we have for some . Noting that , we have is a quasi-isometric embedding of into . ∎
Note that the Sol group embeds quasi-isometrically into a product of two hyperbolic planes (for example, see [dC08, Section 9]). However, the Sol lattice contains exponentially distorted elements by [NS20, Lemma 5.2].
Corollary 2.6.
The fundamental group of a 3-manifold with Sol geometry does not have property (QT).
Corollary 2.7.
The Baumslag-Solitar group for does not have property (QT).
2.2. Sub-exponential growth and solvable groups with property (QT)
The fundamental group of a 3-manifold with Nil geometry also fails to have property (QT) since it contains quadratically distorted elements (for example, see Proposition 1.2 in [NS20]). Generalizing results about property (QT) of 3-manifolds with Sol or Nil geometry, in the rest of this subsection, we provide a characterization of sub-exponential growth groups/ solvable groups with property (QT) and give the proof of Theorem 1.8.
In next results, we apply the general results in [CCMT15] about the isometric actions on hyperbolic spaces to quasi-trees. By Gromov, unbounded isometric group actions can be classified into the following four types:
-
(1)
horocyclic if it has no loxodromic element;
-
(2)
lineal if it has a loxodromic element and any two loxodromic elements have the same fixed points in the Gromov boundary;
-
(3)
focal if it has a loxodromic element, is not lineal and any two loxodromic elements have one common fixed point;
-
(4)
general type if it has two loxodromic elements with no common fixed point.
Proposition 2.8.
Assume that has property (QT). Then there exist a finite index subgroup of which acts on a Euclidean space with and finitely many quasi-trees for with lineal or focal or general type action so that the orbital map of into is a quasi-isometric embedding.
Moreover, the action on each can be chosen to be cobounded.
Proof.
By Corollary 2.4, the finite product of quasi-trees given by property (QT) has the above form of de Rham decomposition. By [FL08, Corollary 1.3],
where is a subgroup of the permutation group on the indices . Thus, there exists a finite index subgroup of acting on each de Rham factor such that for and .
First of all, we can assume that the actions of on and each is unbounded. Otherwise, we can remove and with bounded actions from the product without affecting property (QT).
We now consider the action on for . We then need verify that the action of on cannot be horocyclic. By way of contradiction, assume that the action of on given is horocyclic.
Note that the proof of [CCMT15, Prop 3.1] shows that the intersection of any orbit of on with any quasi-geodesic is bounded. By [Man06, Corollary 3.2], any isometry on a quasi-tree has either bounded orbits or a quasi-geodesic orbit. Thus, we conclude that any orbit of for every on is bounded. We are then going to prove that the action of on has bounded orbits. This is a well-known fact and we present the proof for completeness.
By -hyperbolicity of , each (with bounded orbits) has a quasi-center : there exists a constant depending only on such that for . Moreover, for any and any , the Gromov product is bounded by a constant depending only on . As a consequence, the union of quasi-centers has finite diameter. Indeed, note that and are bounded by for any . If for two elements , the distance is sufficiently large relative to , the path connecting dots for would be a sufficiently long local quasi-geodesic, so it is a global quasi-geodesic. By the previous paragraph, we obtain a contradiction so the -invariant set is bounded. Since the action on is assumed to be unbounded, we thus proved that the action on cannot be horocyclic.
At last, it remains to prove the “moreover” statement. By Manning’s bottleneck criterion [Man06], any geodesic is contained in a uniform neighborhood of every path with the same endpoints. Thus, any connected subgraph of a quasi-tree is uniform quasiconvex and so is a uniform quasi-tree. Since is a finitely generated group, by taking the image of the Cayley graph, we can thus construct a connected subgraph on each quasi-tree so that the action on the subgraph (quasi-tree) is co-bounded. Thus, the proposition is proved. ∎
We are able to characterize sub-exponential groups with property (QT) as follows.
Proposition 2.9.
Let be a finitely generated group with sub-exponential growth. Then has property (QT) if and only if is virtually abelian.
Proof.
We first observe that in Proposition 2.8 can be replaced by a finite product of real lines. Indeed, consider the action of on Euclidean space . By assumption, is of sub-exponential growth. It is well-known that the growth of any finitely generated group dominates that of quotients, so the image of acting on has sub-exponential growth. Since finitely generated linear groups do not have intermediate growth, must be virtually nilpotent. It is well-known that virtually nilpotent subgroups in must be virtually abelian. Thus, contains a finite index subgroup for . By taking the preimage of in , we can assume further that acts on through . It is clear that acts on real lines so that the product action is geometric. We thus replace by the product where admits a lineal action on each by translation.
By Proposition 2.8 the action of on is either lineal or focal or general type. In the latter two cases, contains a free (semi-)group by [CCMT15, Lemma 3.3], contradicting the sub-exponential growth of . Thus, the action of on each is lineal. By Proposition 2.8, we can assume that is a quasi-line.
By [Man06, Lemma 3.7], a quasi-line admits a -quasi-isometry (with a quasi-inverse ) to for some . A lineal action of on is then conjugated to a quasi-action of on sending to a -quasi-isometry on for some . By taking an index at most 2 subgroup, we can assume that every element in fixes pointwise the two ends of . Note that a -quasi-isometry on fixing the two ends of is uniformly bounded away from a translation on . So, for any , the orbital map is a quasi-homomorphism . It is well-known that for any amenable group, any quasi-homomorphism must be a homomorphism up to bounded error. We conclude that any -orbit on stays in a bounded set.
Therefore, any -orbit on is bounded, so the proper action on implies that is a finite group. It is well-known that if a group has finite commutator subgroup, then it is virtually abelian ([BH99, Lemma II.7.9]). The lemma is proved. ∎
It would be interesting to ask whether Proposition 2.9 holds within the class of solvable groups. In Proposition 2.11 below, we are able to give a positive answer to the previous question when the solvable group has finite virtual cohomological dimension. To this end, we need the following fact.
Lemma 2.10.
Any unbounded isometric action of a meta-abelian group on a quasi-tree must be lineal.
Recall that a meta-abelian group is a group whose commutator subgroup is abelian.
Proof.
Indeed, the abelian group (of possibly infinite rank) cannot contain free semi-groups, so by [CCMT15, Lemma 3.3], the action of on a quasi-tree must be bounded or lineal.
Assume first that has a bounded orbit in . Since is abelian, we have that for any and , and thus has finite Hausdorff distance to for any . Assume that are loxodromic. Then is quasi-isometric to a line. Hence, we obtain that the fixed points of at the Gromov boundary must be coincide. This means the action of on is lineal.
In the lineal case, preserves some bi-infinite quasi-geodesic up to finite Hausdorff distance. Since is a normal subgroup in , we see that every loxodromic element in also preserves up to a finite Hausdorff distance. Thus, the action of on is also lineal. ∎
By Lemma 2.5, a group with property (QT) is translation proper in the sense of Conner [Con00]: the translation length of any non-torsion element is positive. If is solvable and has finite v.c.d., then Conner shows that is virtually meta-abelian.
Proposition 2.11.
Suppose that a solvable group has finite virtual cohomological dimension. If has property (QT) then it is virtually abelian.
Proof.
Passing to finite index subgroups, assume that is meta-abelian so any quotient of is meta-abelian. By Lemma 2.10, the action of on each is lineal.
After possibly passing to an index 2 subgroup, a lineal action of any amenable group on a quasi-line can be quasi-conjugated to be an isometric action on . Indeed, by the proof of Lemma 2.9, conjugating the original action by almost isometry gives a quasi-action of on so that any orbital map induces a quasi-homomorphism of to . For amenable groups, any quasi-homomorphism differs from a homomorphism by a uniform bounded constant. Thus, up to quasi-conjugacy, the lineal action of on can be promoted to be an isometric action on .
Consequently, we can quasi-conjugate the action of a solvable group on a finite product of quasi-trees to a proper action on a Euclidean space. Thus, must be virtually abelian. ∎
2.3. CKA groups
Admissible groups firstly introduced in [CK02] are a particular class of graph of groups that includes fundamental groups of –dimensional graph manifolds. In this section, we review admissible groups and their properties that will used throughout the paper.
Let be a connected graph. We often consider oriented edges from to and denote . Then denotes the oriented edge with reversed orientation. Denote by the set of vertices and by the set of all oriented edges.
Definition 2.12.
A graph of groups is admissible if
-
(1)
is a finite graph with at least one edge.
-
(2)
Each vertex group has center , is a non-elementary hyperbolic group, and every edge subgroup is isomorphic to .
-
(3)
Let and be distinct directed edges entering a vertex , and for , let be the image of the edge homomorphism . Then for every , is not commensurable with , and for every , is not commensurable with .
-
(4)
For every edge group , if is the edge monomorphism, then the subgroup generated by and has finite index in .
A group is admissible if it is the fundamental group of an admissible graph of groups.
Definition 2.13.
We say that an admissible group is a Croke-Kleiner admissible group or CKA group if it acts properly discontinuous, cocompactly and by isometries on a complete proper CAT(0) space . Such action is called a CKA action and the space is called a CKA space.
Example 2.14.
-
(1)
Let be a nongeometric graph manifold that admits a nonpositively curved metric. Lift this metric to the universal cover of , and we denote this metric by . Then the action is a CKA action.
-
(2)
Let be the torus complexes constructed in [CK00]. Then is a CKA action.
-
(3)
One may build Croke-Kleiner admissible groups algebraically from any finite number of hyperbolic CAT(0) groups. The following example is for but the same principle works for any . Let and be two torsion-free hyperbolic groups that act geometrically on spaces and respectively. Then (with ) acts geometrically on the space . Any primitive hyperbolic element in gives rise to a totally geodesic torus in the quotient space with basis . We re-scale so that the translation length of is equal to that of for each . Let be a flip isometry respecting these lengths, that is, an orientation-reversing isometry mapping to and to . Let be the space obtained by gluing to by the isometry . There is a metric on which makes into a locally space (see e.g. [BH99, Proposition II.11.6]). By the Cartan-Hadamard Theorem, the universal cover with the induced length metric from is a CAT(0) space. Let be the fundamental group of . The action is geometric, and is an example of a Croke-Kleiner admissible group.
Remark 2.15.
All graph 3-manifold groups are admissible, but there are closed graph 3-manifold groups that are not CAT(0) groups (see [KL96]), and thus are not CKA groups. The following is another example. Take two non-virtually split central extensions of hyperbolic groups by (e.g. lattices) and amalgamate them over to get an admissible group. This group cannot act properly on CAT(0) spaces, since central extensions acting on CAT(0) spaces must virtually split as direct products ([BH99, Thm. II.7.1]).
A collection of subgroup in a group is called almost malnormal if implies and . It is well-known that a hyperbolic group is hyperbolic relative to any almost malnormal collection of quasi-convex subgroups ([Bow12]).
Lemma 2.16.
Let be the image of an edge group into and be its projection in under . Then is an almost malnormal collection of virtually cyclic subgroups in .
In particular, is hyperbolic relative to .
Proof.
Since , we have is virtually cyclic. The almost malnormality follows from non-commensurability of in . Indeed, assume that contains an infinite order element by the hyperbolicity of . If is sent to , then is sent to . Thus, contains an abelian group of rank 2. The non-commensurability of in implies that and . This shows that is almost malnormal. ∎
Let be a CKA action where is the fundamental group of an admissible graph of groups , and let be the action of on the associated Bass-Serre tree of (we refer the reader to Section 2.5 in [CK02] for a brief discussion). Let and be the vertex and edge sets of . By CAT(0) geometry,
-
(1)
for every vertex the minimal set of splits as metric product where acts by translation on the –factor and acts geometrically on the Hadamard space . Since is a hyperbolic group, it follows that is a hyperbolic space.
-
(2)
for every edge , the minimal set of splits as where is a compact Hadamard space and acts cocompactly on the Euclidean plane .
We note that the assignments and are –equivariant with respect to the natural actions.
We summarize results in Section 3.2 of [CK02] that will be used in this paper.
Lemma 2.17.
Let be a CKA action. Then there exists a constant such that
-
(1)
.
-
(2)
If and then .
We shall refer and to as vertex and edge spaces for .
2.3.1. Strips in CKA spaces
(Section 4.2 in [CK02]) We first choose, in a –equivariant way, a plane (which we will call boundary plane) for each edge . For every pair of adjacent edges , , we choose, again equivariantly, a minimal geodesic from to ; by the convexity of where , this geodesic determines a Euclidean strip (possibly of width zero) for some geodesic segment .
Note that is an axis of . Hence if , are distinct vertices, then the angle between the geodesics and is bounded away from zero. If then generates a finite index subgroup of . We remark that the intersection of two strips and is a point. Indeed, we have . As two lines and in the plane are axes of , respectively and generates a finite index subgroup of , it follows that these two lines are non-parallel, and hence their intersection must be a point.
We note that the intersection of a boundary plane of with the hyperbolic space is a line. The boundary lines of the hyperbolic space are the following collection of lines: .
Definition 2.18.
If for each edge , the boundary line is parallel to the –line in , then the CKA action is called flip.
In the sequel, it will be useful to choose.
Definition 2.19.
An indexed map is a –equivariant coarsely Lipschitz map such that for all .
If acts freely on , such a map can be constructed as follows. Choose a fundamental set so that contains exactly one point from each orbit. Define so that , and extend equivariantly to the whole space . By Lemma 2.17.(2), one can show that is a coarsely Lipschitz map: for some . See [CK02, Section 3.3] for more details.
If acts only geometrically on , we could replace with a -orbit for a basepoint with trivial stabilizer. This does not matter much as we are only interested in the coarse geometry hereafter. By modifying , we could always assume such a basepoint exists. Indeed, attach a Euclidean cone to a point so that its nontrivial but finite stabilizer acts freely on its boundary circle. We do the modification equivariantly for all translates in .
2.3.2. Special paths in CKA spaces
Let be a CKA action. We now introduce the class of special paths in .
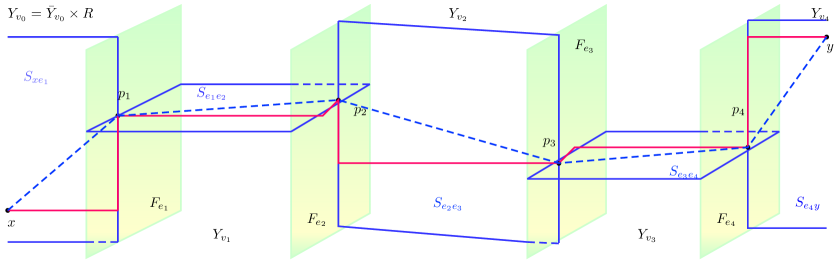
Definition 2.20 (Special paths in ).
Let be the indexed map given by Definition 2.19. Let and be two points in . If , a special path in connecting to is the geodesic . Otherwise, let be the geodesic edge path connecting to and let be the intersection point of adjacent strips, where and . A special path connecting to is the concatenation of the geodesics
Remark 2.21.
By definition, the special path except the and depends only on the geodesic in , the choice of planes and the indexed map .
Proposition 2.22.
[NY, Prop. 3.8] There exists a constant such that every special path in is a –quasi-geodesic.
Assume that so that for . If is a special path between and , we then define
| (2) |
where and . By Proposition 2.22, we have
By definition, the system of special paths is -invariant, so the symmetric functions and are -invariant for any .
We partition the vertex set of the Bass-Serre tree into two disjoint classes of vertices and such that if and are in then is even.
Lemma 2.23.
[NY, Lemma 4.6] There exists a subgroup of index at most 2 in preserving for so that for any .
2.4. Projection axioms
In this subsection, we briefly recall the work of Bestvina-Bromberg-Fujiwara [BBF15] on constructing a quasi-tree of spaces.
Definition 2.24 (Projection axioms).
Let be a collection of geodesic spaces equipped with projection maps
Denote for . The pair satisfies projection axioms for a projection constant if
-
(1)
when .
-
(2)
if are distinct and then .
-
(3)
for , the set is finite.
The following is a useful example to keep in mind throughout the paper. For further details, we refer the reader to the introduction of [BBF15]. In this example, the collection of metric spaces consists of subspaces of a singe metric space; however, we emphasize that this need not be the case in general.
Example 2.25.
Let be a discrete group of isometries of , and a loxodromic element with axis . Let be the set of all –translates of . Given , let denote the closest point projection map in . Since all translates of are convex, this is a well-defined –Lipschitz map. One may check that satisfies the projection axioms for some constant .
Remark 2.26.
Let satisfy projection axioms. By [BBFS19, Thm 4.1 and Lem 4.13], there exists a variant of so that and are uniformly close in Hausdorff distance, and satisfies strong projection axioms, i.e, axioms are the same as projection axioms execpt for replacing (2) in Definition 2.24 with the following stronger statement: if are distinct and then for a projection constant depending only on .
The following results from [BBF15] will be used in this paper.
-
•
Fix . In [BBF15], a quasi-tree of spaces is constructed for given satisfying projection axioms with constant .
-
•
If and is a collection of uniform quasi-lines, then is a unbounded quasi-tree. If admits a group action of so that for any and , then acts by isometry on .
Set if , otherwise . Let . If define . If , define . If , let be the distance in . The following distance formula from [BBF15] is crucial in what follows.
Proposition 2.27.
[BBF19, Proposition 2.4] Let satisfy the strong projection axioms with constant . Then for any ,
for all .
Definition 2.28 (Acylindrical action).
By [Bow08], any nontrivial isometry of acylindrical group action on a hyperbolic space is either elliptic or loxodromic. A -quasi-geodesic for some is referred to as a quasi-axis for a loxodromic element , if have finite Hausdorff distance depending only on .
A group is called elementary if it is neither finite nor virtually cyclic.
Proposition 2.29.
[BBF19] Assume that a non-elementary hyperbolic group acts acylindrically on a hyperbolic space . For a loxodromic element , consider the set of all -translates of a given -quasi-axis of for given . Then there exists a constant such that for any , the set
is a finite union of double -cosets.
In particular, there are only finitely many distinct pairs satisfying up to the action of .
Lemma 2.30.
[Yan19, Lemma 2.14] Let be a non-elementary group admitting a co-bounded and acylindrical action on a –hyperbolic space . Fix a basepoint . Then there exist a set of three loxodromic elements and with the following property.
For any there exists so that is a loxodromic element and the bi-infinite path
is a –quasi-geodesic.
Convention 2.31.
When speaking of quasi-lines in hyperbolic spaces with actions satisfying Lemma 2.30, we always mean –quasi-geodesics where depend on and .
3. Property (QT) of relatively hyperbolic groups
In this section, we are going to prove Theorem 1.5. The notion of relatively hyperbolic groups can be formulated from a number of equivalent ways. Here we shall present a quick definition due to Bowditch [Bow12] and recall the relevant facts we shall need without proofs.
Let be a finitely generated group with a finite collection of subgroups . Fixing a finite generating set , we consider the corresponding Cayley graph equipped with the word metric .
Denote by the collection of peripheral cosets. Let be the coned-off Cayley graph obtained from as follows. A cone point denoted by is added for each peripheral coset and is joined by half edges to each element in . The union of two half edges at a cone point is called a peripheral edge. Denote by the induced length metric after coning-off.
The pair is said to be relatively hyperbolic if the coned-off Cayley graph is hyperbolic and fine: any edge is contained in finitely many simple circles with uniformly bounded length.
Let denote the shortest projection in word metric to in and the -diameter of the projections of the points to . Since has the strongly contracting property with bounded intersection property, the projection axioms with a constant hold for (see [Sis13]).
3.1. Thick distance formula
A geodesic edge path in the coned-off Cayley graph is -bounded for if the end points of every peripheral edge have -distance at most .
By definition, a geodesic can be subdivided into maximal -bounded non-trivial segments () separated by peripheral edges () where . It is possible that : consists of only peripheral edges.
Define
which sums up the lengths of -bounded subpaths of length at least . It is possible that , so . Define the -thick distance
| (3) |
over all relative geodesics between . Thus, is -invariant.
A relative path without backtracking in admits non-unique lifts in which are obtained by replacing the peripheral edge by a geodesic in with the same endpoints. The distance formula follows from the fact that the lift of a relative quasi-geodesic is a quasi-geodesic (see [DS05], [GP16, Prop. 6.1]). The following formula is made explicitly in [Sis13, Theorem 0.1].
Lemma 3.1.
For any sufficiently large and for any ,
| (4) |
The following result is proved in [NY, Lemma 5.5] under the assumption that is hyperbolic relative to a set of virtually cyclic subgroups. However, the same proof works for any relatively hyperbolic group.
Lemma 3.2.
For any sufficiently large , there exists an –finite collection of quasi-lines in and a constant , such that for any two vertices , the following holds
| (5) |
A group endowed with the profinite topology is a topological group so that the set of all finite index subgroups is a (close/open) neighborhood base of the identity. A subgroup is called separable if it is closed in the profinite topology. Equivalently, it is the intersection of all finite index subgroups containing . A group is called residually finite if the trivial subgroup is closed.
A maximal abelian subgroup of a residually finite group is separable (see [Ham01, Proposition 1]). Note that a maximal elementary (i.e. virtually cyclic) group in a relatively hyperbolic group contains a maximal abelian group (of rank 1) as a finite index subgroup. If is residually finite, then as a finite union of closed subsets is closed and thus separable.
We will use the following corollary in the proof of Theorem 1.5.
Corollary 3.3.
Assume that is a residually finite relatively hyperbolic group. Then for any , there exists a finite index subgroup acting on finitely many quasi-trees such that the orbital map of the -action on is a quasi-isometric embedding from to .
This corollary is essentially proved in [NY], inspired by the arguments in the setting of mapping class groups [BBF19]. We sketch the proof at the convenience of the reader.
Sketch of proof.
Recall that for any , a set of (uniform) quasi-lines in a hyperbolic space with -bounded projection satisfies the projection axioms with projection constant for a constant . Let and be the constants given by Lemma 2.30 with respect to the acylindrical action . For our purpose, we will choose to be the constant given by Proposition 2.29. Then the distance formula for the quasi-tree constructed from holds for any .
For a fixed large constant , Lemma 3.2 provides an -finite set of quasi-lines so that (5) holds. We then use the separability to find a finite index subgroup of so that decomposes as a finite union of -invariant ’s each of which satisfies the projection axioms with projection constant . To be precise, the stabilizer of a quasi-line in is a maximal elementary subgroup of and thus is separable in if is residually finite (since a maximal abelian group in a residually finite group is separable). By Proposition 2.29 and the paragraph after Lemma 2.1 in [BBF19], the separability of allows one to choose a finite index subgroup containing such that any -orbit in the collection of quasi-lines satisfies the projection axioms with projection constant . We take a common finite index subgroup for finitely many quasi-lines in up to -orbits and therefore have found all -orbit so that their union covers .
Finally, it is straightforward to verify that the right-hand term of (5) coincides with the sum of distances over the finitely many quasi-trees . Thus, the thick distance is quasi-isometric to the distance on a finite product of quasi-trees. ∎
All our discussion generalizes to the geometric action of on a geodesic metric space , since there exists a -equivariant quasi-isometry between and . Therefore, replacing with , we have the same thick distance formula. This is the setup for CKA actions in next sections.
In next subsection, we obtain the property (QT) for relatively hyperbolic groups provided peripheral subgroups do so.
3.2. Proof of property (QT) of relatively hyperbolic groups
Proof of Theorem 1.5.
Recall that is a finite set of subgroups. For each , choose a full set of left -coset representatives in so that . For given and , we define the collection of quasi-trees
where are quasi-trees associated to given in assumption. Then preserves by the following action: for any point and ,
where is given by for .
We are now going to define projection maps as follows.
By assumption, we fix an orbital embedding of into so that the induced map is a quasi-isometric embedding. We then define an equivariant family of orbital maps so that
Then for any and , where with and .
Let be the shortest projection to the coset in with respect to the word metric. For any two distinct , we set
Recall that satisfies the projection axioms with shortest projection maps ’s. It is readily checked that the projection axioms pass to the collection under equivariant Lipschitz maps .
We can therefore build the projection complex for for a fixed . By Proposition 2.27, the following distance holds for any :
| (6) |
Note that is a quasi-isometric embedding for each . Thus, for any and ,
| (7) |
Recall from Lemma 3.1 that for any , we have
Note that the orbital map of any isometric action is Lipschitz. To prove property (QT) of , it suffices to give an upper bound of . Taking account of (8), it remains to construct a finite product of quasi-trees to bound as follows.
Since is residually finite, by Corollary 3.3, there exists a finite index subgroup, still denoted by , and a finite product of quasi-trees so that the orbital map from to gives a quasi-isometric embedding of equipped with -function into .
Recall that is the shortest projection to . For , define
by sending an element to . We then have equivariant maps of to quasi-trees after re-indexing, where .
Let be the map from to , where is the finite product of quasi-trees as in the previous paragraphs. As fore-mentioned, the product map gives an upper bound on , so is a quasi-isometric embedding of . Therefore, has property (QT). ∎
Remark 3.4.
We say that the profinite topology on induces a full profinite topology on a subgroup if every finite index subgroup of contains the intersection of with a finite index subgroup in .
Theorem 3.5.
Suppose that is residually finite and each is separable. Assume furthermore that induces the full profinite topology on each . If each acts by isometry on a finite product of quasi-trees without -factor such that orbital maps are quasi-isometric embeddings, then has property (QT).
Proof.
By [FL08, Corollary 1.3], there is a finite index subgroup of acting on each quasi-tree so that the diagonal action of on induces a quasi-isometric embedding orbital map .
By the assumption, induces the full profinite topology on , so every finite index subgroups of a separable subgroup is also separable. Thus, there are finite index subgroups of for such that
Consider the finite index normal subgroup in . Since is normal in , we see that is equivalent to . The later holds by the choice of . Hence, for every , preserves the factors of the product decomposition. Note that is hyperbolic relative to . The conclusion follows from Theorem 1.5. ∎
4. Coning off CKA spaces
In this section, we recapitulate the content of [NY, Sect. 5] and give an outline of the proof of Theorem 1.3.
Let be a CKA action where is the fundamental group of an admissible graph of groups (see Subsection 2.3), and let be the action of on the associated Bass-Serre tree of . Let and be the vertex and edge sets of .
Let be the collection of boundary planes of the space (see Subsection 2.3). We note that the intersection of a boundary plane of with the hyperbolic space is a line. We define the collection of lines of the hyperbolic space as follows:
which shall be referred boundary lines.
4.1. Construction of coned-off spaces
Recall that where consists of vertices in with pairwise even distances. Let be the subgroup of index at most preserving and given by Lemma 2.23.
Fix a large . A hyperbolic -cone by definition is the metric completion of the (incomplete) universal cover of a punctured hyperbolic disk of radius . Let be the collection of hyperbolic spaces and their coned-off spaces (which are uniformly hyperbolic for ) by attaching hyperbolic -cones along the boundary lines of .
Note that preserves and by the action on the index for any . For each , let be the star of in with adjacent vertices as extremities. Then admits the action of so that the stabilizers of the extremities are the corresponding edge groups.
Define to be the space obtained from the disjoint union of coned-off spaces with cone points identified with the extremities of the stars with . Endowed with induced length metric, the space is a Gromov-hyperbolic space.
Lemma 4.1.
Fix a sufficiently large and . The space is a –hyperbolic space where only depends on the hyperbolicity constants of ().
The subgroup acts on with the following properties:
-
(1)
for each , the stabilizer of is isomorphic to and acts co-boundedly on , and
-
(2)
for each , acts on in the same manner of the action on Bass-Serre tree .
Proof.
Note that the stabilizers of the cone points of under the action of on are the same as that of the extremities of stars , which are both the edge groups for . By construction, the cone points of are identified with the extremities of stars , so the actions of on () and of on () extend over , and hence acts by isometries on . ∎
Remark 4.2.
We now define the thick distance on by taking the sum of thick distances through as follows.
If is a point in a coned-off space , we denote by (by abuse of notations). By the above tree-like construction, any path between has to pass through in order a pair of boundary lines of for each . By abuse of language, if is not contained in a hyperbolic cone, set for . Similarly, if is not contained in a hyperbolic cone, set for .
Let be a pair of points in the boundary lines so that is orthogonal to and . Recall that is the -cut-off thick distance defined in (3).
Definition 4.3.
For any , the -thick distance between and is defined by
| (9) |
Since is -invariant, we see that is -invariant.
Remark 4.4.
The definition of is designed to ignore the parts in hyperbolic cones between different pieces. One consequence is that perturbing in hyperbolic cones does not change their -thick distance.
4.2. Construct the collection of quasi-lines in
If denotes the stabilizer in of a boundary line of , then is virtually cyclic and almost malnormal. Since is -finite by conjugacy, let be a complete finite set of conjugacy representatives. By Lemma 2.16, is hyperbolic relative to peripheral subgroups . Hence, the results in Section 3 apply here.
Let be the universal constants given by Lemma 2.30 applied to the actions of on for all (since there are only finitely many actions up to conjugacy). By convention, the quasi-lines in coned-off spaces are understood as –quasi-geodesics in and ’s.
The coning-off construction has the following consequence ([NY, Lemma 5.14]): the shortest projection of any quasi-line in to a quasi-line in has to pass through the cone point attached to , and thus has uniformly bounded diameter by .
For simplicity, we also assume that satisfies the conclusion of Proposition 2.29. Consequently, this determines a constant such that any set of quasi-lines with -bounded projection satisfies the projection axioms with projection constant .
Fix . For each , there exists an -finite collection of quasi-lines in and a constant such that -distance formula holds by Lemma 3.2.
Since acts co-finitely on and , we can assume if for . Let
be the union of ’s for which are both -invariant. We now equip with projection maps as the shortest projection maps between two quasi-lines in for .
If is a quasi-line in for , denote by the –diameter of the shortest projection of to .
The following result shows that the thick distance is captured by the projections of . Recall that is the radius of the hyperbolic cones in constructing .
Proposition 4.5.
[NY, Prop. 5.9] For any , the following holds
| (10) |
In the next subsection, we construct a suitable finite subgroup of such that it acts isometrically on a finite product of quasi-trees under some assumptions on vertex groups. This allows rewriting the right-hand side of the distance formula (10) as the product distance of ’s.
4.3. Isometric action of a suitable finite index subgroup of
In a group, two elements are independent if they do not have conjugate powers (see [Wis00, Def. 3.2]).
Definition 4.6.
A group is omnipotent if for any non-empty set of pairwise independent elements () there is a number such that for every choice of positive natural numbers , there is a finite quotient such that has order for each .
Let be a CKA action, where is the admissible graph of groups so that every vertex group is a central extension of an omnipotent hyperbolic group. By Lemma 4.1, the finite index subgroup acts on that is equipped with the -invariant function . The main result of this subsection is the following.
Proposition 4.7.
The group admits finitely many isometric actions on quasi-trees for such that there exists a -equivariant quasi-isometric embedding from to .
We emphasize here that on the domain for the quasi-isometric embedding is not a distance function, but the target is equipped with product distance.
By [BH99, Theorem II.6.12], contains a subgroup intersecting trivially with so that the direct product is a finite index subgroup. Thus, the image of in is of finite index in and acts geometrically on hyperbolic spaces . Since is omnipotent and then is residually finite, we can assume that is torsion-free.
Recall the -invariant collection of quasi-lines in Subsection 4.2:
where is the collection of quasi-lines so that -distance formula holds by Lemma 3.2. By the residual finiteness of , there exists a finite index subgroup so that is partitioned into -invariant sub-collections with projection constants .
To prepare the proof, we need to introduce a compatible condition of glueing finitely index subgroups. A collection of finite index subgroups is called compatible if whenever , we have
By [DK18, Theorem 7.51], a compatible collection of finite index subgroups gives a finite index subgroup of . The following result says that upon taking finite index subgroups, we can assume that each vertex group is a direct product in a CKA group.
Lemma 4.8.
Let be a collection of finite index subgroups. Then there exist finite index subgroups of , of and of so that the collection of finite index subgroups is compatible.
Proof.
We pass to further finite index subgroups satisfying compatible conditions, which then gives a further index subgroup . For , let us partition into -obits . By the construction of , we know that intersects each vertex group of the Bass-Serre tree in a (conjugate) subgroup . Thus, for each , are the union of certain -invariant sub-collections where are varied in .
Recall that for satisfies the projection axioms with a uniform projection constant in Subsection 4.2. We can then build the quasi-trees where . Setting , this thus yields isometric group actions of on quasi-trees .
We first construct a -equivariant map from to . By equivariance, it suffices to fix a basepoint in each and ’s so that sends basepoints to basepoints. The quasi-isometric embedding property follows from the distance formula (10), where the right-hand side is now replaced by the distance in the corresponding quasi-trees.
Note that is of finite index in . By taking more copies of quasi-trees in the target, the map can be made -equivariant. Indeed, if a finite index subgroup acts on some space then acts on a finite product of copies of without preserving the factors. The map can be extended to these copies as well. The proof of the Proposition is complete. ∎
We now give the proof of Lemma 4.8.
Proof of Lemma 4.8.
Assume that for any . Then for an oriented edge from to , the subgroup is of finite index in .
Note that admits a base where is primitive so that is some power of . Let . Thus, is a direct product of a torsion group with in , where is a loxodromic element.
Similarly, let such that . Keep in mind that for any integer , is of finite index in .
We choose an integer such that for every vertex and every oriented edge from . Such an integer exists since injects into as a finite index subgroup, and is a finite graph of groups.
Apply the omnipotence of to the independent set of elements . Let be the constant given by Definition 4.6. Set
Set . Thus, for the collection , there exists a finite quotient such that has order and . Then is of finite index in . Recall that is injective (see the paragraph before Lemma 4.8). Since is loxodromic in and for , we have is a loxodromic element in .
For each oriented edge , define , and .
Let be any element so we can write for some and . Recall that is a direct product of and a torsion group, and is torsion-free. So is some power of : for some . Note that so the omnipotence implies that , i.e. for some . Since and is injective, we obtain that . Therefore, which implies
Therefore, the collection is verified to be compatible. ∎
4.4. Outline of the proof of Theorem 1.3
Let be a CKA action where is the fundamental group of an admissible graph of groups such that for every vertex group the central extension (1) has omnipotent hyperbolic quotient group. Recall that property (QT) is preserved undertaking finite index subgroups (see Lemma 2.3). Upon passing to further index subgroups in Lemma 4.8, we can assume that , where acts geometrically on and also we can assume . To show the property (QT) of , we must find not only a suitable action on a finite product of quasi-trees, but also ensure the distance of points in the image can recover word distance in the ambient group. We briefly describe here the strategy of the proof. Details are performed in Section 5 and Section 6.
Thanks to Proposition 4.7, we know that there exists a -equivariant quasi-isometric embedding (note that )
Here (with ) is a quasi-tree. As the geometry of space does not capture the distance from vertical parts of , there is no way finding a quasi-isometric embedding from the orbit to . To overcome this obstacle, in Section 5, we will construct two additional quasi-trees, denoted by and , and will show that there is indeed a -equivariant quasi-isometric embedding
(Section 6 is devoted to constructing and verifying -equivariant quasi-isometric embedding of ). As a consequence, we obtain the desirable –equivariant quasi-isometric embedding
which entails property (QT) of .
5. Projection system of fiber lines
Recall we partition where consists of vertices in with pairwise even distances. For convenience, we sometimes write and . We note that property (QT) of a group is preserved under taking a finite index subgroup (see Lemma 2.3). Thus passing to a finite index subgroup (see Lemma 2.23) if necessary we could assume that is torsion-free and preserves with .
Note that is an oriented edge from towards , and the oriented edge from towards . For each oriented edge , let be the corresponding boundary plane. It is clear that does not depend on the orientation.
5.1. Desired quasi-lines
By Lemma 2.17, the CKA space decomposes as the union of vertex spaces for , on which the vertex groups act geometrically. The center allows to split as a metric product . Upon passing to further finite index subgroups in Lemma 4.8, we can assume that , where acts geometrically on . If the CKA action is not flip (as in [NY]), the system of fiber lines in does not behave well with respect to the -action. Following the recent work [HRSS22], we introduce a better geometric model for vertex subgroups , still as the metric product of with a quasi-line, to resolve the -action on the original fiber lines.
We first explain the construction of the quasi-line obtained from a quasi-homeomorphism. The following lemma is cited from Lemma 4.2 and the proof of the Corollary 4.3 in [HRSS22]. We present their proof as it is short and crucial for our discussion.
Lemma 5.1.
Let be a hyperbolic group relative to a finite collection of virtually cyclic subgroups . Consider and fix a set of elements for each such that has unbounded projection to . Then there exist a generating set of and a -quasi-isometry such that the following holds.
-
(1)
If are two -cosets for , then
where denotes the distance between two subsets in equipped with a word metric relative to a finite generating set (so not the distance on ).
-
(2)
With the natural action of , the diagonal action of on is metrically proper and cobounded, where acts loxodromically on but acts boundedly.
In applications, the choice of elements shall come from the fiber generator of the adjacent pieces. See Lemma 5.2 below.
Proof.
Let and be the natural projections. Let be the projection to of the element . We then choose a quasi-homomorphism by [HO13] such that but if . Define the quasi-homomorphism of as follows: for any
By definition, takes the constant value on each -cosets. Moreover, the distance is bi-Lipschitz to with a constant depending only on .
To find the generating set , notice that the homogenization of (still denoted by ) has a bounded distance to the original one. As is unbounded, there exists so that is an infinite cyclic subgroup. Denote a (possibly infinite) subset of . One can prove that generates , and induces a desired quasi-isometry . See [ABO19, Lemma 4.15] for details. ∎
5.2. New geometric model for vertex spaces
Recall that acts on the Bass-Serre tree with finitely many vertex orbits. Let be the full set of vertex representatives, and let be the (infinite) generating set for given by Lemma 5.1. Then acts on the quasi-line . Let be an arbitrary vertex in , so that for some and . By equivariance, we define the quasi-line , and the action of on is induced from the action of on .
Consider the word metric on given by a finite generating set of including a finite generating set of for each representative vertex . Equipping each vertex group with a word metric, the inclusion of into is a quasi-isometric embedding since is quasi-isometric embedded in the CAT(0) space .
Write for the new geometric model for . By Lemma 5.1, the diagonal action is metrically proper and cobounded, and hence the induced orbital map
is a -equivariant quasi-isometry for any basepoint .
Let us fix a basepoint . As acts freely and geometrically on , let
be a bijective -equivariant quasi-isometry, a quasi-inverse to the orbital map of .
Choose the same first coordinate for the above basepoints . Define a -equivariant map as the composite of the above two -equivariant maps
Define the horizontal and vertical projection maps
| (11) |
as the composites of the map with the projections to the factor and respectively. For the product space , we define similarly the horizontal distance and vertical distances and . In terms of these notations, we have for any :
We now derive a few important facts from Lemma 5.1 about .
Lemma 5.2.
There exists a uniform constant such that is a –quasi-isometry: for any then
Moreover, let be the adjacent piece of in the CKA space . Let be a line in the plane such that are fibers in . Then
-
(1)
. In other words, in for some .
-
(2)
Let be any point and be the projection of into the factor . Then .
-
(3)
Denote by the distance of and in . Then
Proof.
We first prove (2). Choose the fixed basepoints in and in so that their projections into the factor are the same: . Take any point in , so . By our definition of the –equivariant quasi-inverse , there exists a group element so that for some uniform constant . We write in . Note that acts on diagonally, thus the image of the group element under the composition map
is , where the first one is the orbital map and the second one is the projection map. If is equipped with -metric, it follows that . As the map descends to the map sending to . Our claim is confirmed.
For the part (1), as there are only finitely many isometric types of of , we only need to prove that for one given . Indeed, recall that factors through as the natural projection . The latter agrees with the quasi-homomorphism up to a bounded error in the proof of Lemma 5.1, vanishing on the center . If denotes the ball at some element with radius , it follows that . Every fiber line in lies in a uniform neighborhood of the orbit of a -coset. Our second claim is thus verified.
The part (3) is clear from our construction. ∎
5.3. Projection maps
Recall where consists of vertices in with pairwise even distances. Denote and . It remains to define a family of projection maps for them.
Definition 5.3 (Projection maps in ).
Let , denote the first two (oriented) edges in . Let and be the two boundary planes of . Let be the strip in joining two boundary plane and of (see Section 2.3.1 for the definition of strips). We note that is a line in that is parallel to a fiber in . We then define projection from into to be
where defined in (11) is the vertical projection to the quasi-line in
Lemma 5.4.
Let be the constant given by Lemma 5.2. Let be distinct vertices in with . If then
Proof.
Let and be the geodesics in the tree connecting and to respectively. Let us denote be the last two edges in (that is also the last two edges in ). Let be the strip in connecting two boundary planes and of By our definition of projection maps, we have that . ∎
5.4. Projection axioms
We are now going to verify that () with the above-defined projection maps in Definition 5.3 satisfy the projection axioms (see Definition 2.24). For each vertex , let be the collection of boundary lines in the hyperbolic space defined at the beginning of Section 4. Let , and be three distinct boundary lines in . We denote
where is the shortest projection of to in the CAT(0) hyperbolic space (note that is a hyperbolic space since acts geometrically on and is a non-elementary hyperbolic group). Recall that
Lemma 5.5.
There exists a uniform constant such that the following holds. Let be distinct vertices in such that are in for some vertex in . Let denote the edge with and let be the plane in associated to . For each , let denote the boundary line of that is the projection of into . Then
Proof.
Let and be the strips in connecting the planes to and to respectively. We denote the line by and denote the line by . Note that both lines and are fibers in . Recall that by our definition of projection maps, we have and . By part (3) of Lemma 5.2, for some , we have that . Note that (indeed, let and be the shortest geodesics joining to and to respectively, then and are the product and of endpoints of and with the direction in respectively). Combining the above inequalities, we obtain a constant still denoted by such that . The lemma is proved. ∎
We are now going to prove the following.
Lemma 5.6.
There exists a constant such that for each , the collection with projection maps ’s satisfies the projection axioms with projection constant .
Proof.
We verify in order the projection axioms (see Definition 2.24) for the projection maps defined on . The case for is symmetric. The constant will be defined explicitly during the proof.
Axiom 1: Let be the constant given by Lemma 5.2. Since is a fiber line in , it follows from Lemma 5.2 that . Thus . Axiom 1 in Definition 2.24 is verified.
Axiom 2: Let be distinct vertices in . We will show that there exists sufficiently large satisfying the following property: if , then or . The constant will be defined explicitly during the proof. Since , it follows from Lemma 5.4 that there is some restriction on , i.e, is either lies on or .
Case 1: lies on . Since , we have and . Axiom 2 thus follows from Lemma 5.4.
Case 2: . Without loss of generality, we can assume that lie in the same link for some vertex in . Indeed, let be adjacent to and . It is clear by definition that and . As a result, we can thus assume that and lie in the link .
Recall that is a -hyperbolic space whose boundary lines satisfy the projection axioms for a constant [Sis13]. We claim that is the desired constant for Axiom 2.
Denote , . Let be the corresponding boundary lines of to the oriented edges . By Lemma 5.5, we have
As satisfies the projection axioms, we see that if , then . Using Lemma 5.5 again, we have that
Let be a constant such that . It follows from the above inequalities that
so Axiom 2 is verified.
Axiom 3: For , the set
is a finite set.
Indeed, by Lemma 5.4, such is either contained in the interior of or . The first case yields only choices for . We now consider the case . Since have pairwise even distance, there exists and two vertices on adjacent to so that . By the projection axioms of boundary lines of , the set of satisfying is finite. Thus, in both cases, the set of such ’s is finite. Axiom 3 is verified. ∎
Lemma 5.7.
For each , the collection admits an action of the group so that
for any and any .
Proof.
Firstly, let us recall some discussion in the beginning of Section 5.2. Recall that be the full set of vertex representatives of and for each representative vertices of , the quasi-line is the Cayley graph for some generating set of (see Lemma 5.1). Let be an arbitrary vertex in , then for some and . The quasi-line is given by , and the action of on is induced from the action of on . We are now going to show that
Recall that the family of maps are –equivariant: for all . Let and be the first two edges in the geodesic with and . By Definition 5.3 of projection map, we have that for any . ∎
Definition 5.8.
Let be the projection constant given by Lemma 5.6, so the collection of quasi-lines with satisfies the projection axioms. For any fixed , we obtain the unbounded quasi-trees of metric spaces and (see Section 2.4). Combining Lemma 5.7 with [BBF15, Theorem 4.4], the spaces and are quasi-trees and admit unbounded isometric actions and . The quasi-trees and are called vertical quasi-trees hereafter.
6. Distance formulas in the CKA space
Let and be the vertical quasi-trees in Definition 5.8. Let be the coned-off spaces defined in Section 4.1. According to the outline of the proof of Theorem 1.3 in Section 4.4, the last step to prove property (QT) of is to show that there is a -equivariant quasi-isometric embedding
This section is devoted to constructing such a desired map and verifying it is a quasi-isometric embedding.
We list here notations that will be used in the rest of this section.
-
•
We fix an edge in the Bass-Serre tree such that . Let be a base point in the common boundary plane between two pieces and .
-
•
Assume that and for some and . We list the vertices on the geodesic by where and . Denote the oriented edge towards . By definition of special paths, let be the intersection of two strips with and .
-
•
Set
where and . It is possible that and , i.e, contains backtracking at and .
6.1. Construction of the desired map
It is a product of the following four maps with the index map in Definition 2.19.
-
•
We define as follows. Recall that each quasi-line for embeds as a convex subset into and is a -equivariant map. For every , we set . The second equality follows by -equivariance.
-
•
Similarly, define by for every .
-
•
Define and extend the definition by equivariance so that for any . We thus obtain a –equivariant map .
-
•
Choose to be the cone point of the hyperbolic cone attached to the boundary line of . We then extend for any so that is the corresponding cone point to of . We thus obtain a –equivariant map .
We then define
| () |
by
where for are equipped with the -thick distance (not genuine distance) defined in (9), and the other three spaces are with length metric. By abuse of language, we call the sum of the distances over the factors as -metric on the product space.
The remainder of this section is to verify the following.
Proposition 6.1.
The map in ( ‣ 6.1) is a –equivariant quasi-isometric embedding.
Idea of the proof of Proposition 6.1:
Since the orbital map of any isometric action is Lipschitz (e.g. see [BH99, Lemma I.8.18]), we will only need to give a linear upper bound on . Recall from (2), for any ,
where and .
Recall from Section 5.2, we build a new geometric model of for each vertex in the Bass-Serre tree . Namely, we have a –equivariant quasi-isometric map . For , we shall accordingly replace by the following quantity
| (12) |
To be precise, we first prove in Lemma 6.2 the following
We then find suitable upper bounds of (see Proposition 6.5) and (see Lemma 6.6).
6.2. Verifying is a quasi-isometric embedding
In this section, we will verify that the map in ( ‣ 6.1) is a quasi-isometric embedding.
6.2.1. Upper bound of the distance on
Lemma 6.2.
Let . The exists a constant such that
| (13) |
Proof.
Recall that and . Using the triangle inequality we have
Note that and . The proof is then completed by summing over the following inequality (14).
Claim.
There exists a uniform constant such that for any ,
| (14) |
Proof of the Claim.
The lemma is proved. ∎
6.2.2. Preparation for upper bounds of and
Fix where the constant is given by Lemma 5.6. Let and be the vertical quasi-trees given by Remark 5.8. With , Proposition 2.27 gives the distance formula
| () |
To give an appropriate upper bound of , we need the following two technical lemmas (Lemma 6.3 and Lemma 6.4).
Lemma 6.3.
For any with , we have
| (15) |
For any , we have
| (16) |
Proof.
We first prove (15) for the case . The cases or are similar.
Note that is a fiber line of containing , and similarly, contains . By Definition 5.3 of projection maps, we have
and
Let be the constant given by Lemma 5.2, so the fiber lines are sent by into as subsets of diameter at most :
By definition of , we have and . Thus
As and , we obtain
completing the proof of (15).
We are now going to prove (16). If or , the same proof for (15) proves (16). We now consider and . In this case, we note that . By definition, we have that , so we obtain . Recall that is the strip in over the shortest arc from to (See construction of special path). As , we have is a fiber line of that passes through and also . Thus, .
Recall that is the strip in over the shortest arc from to (See construction of special path). As , we have is a fiber line of that passes through and also . Thus, . Let be the fiber line on that passes through . If , then and . By the same reason, passes through , so . If , the projection must be contained in . In both cases, we have
where we use by Lemma 5.2. For and , we obtain
concluding the proof of (16). ∎
Let us recall the notation from Section 2.4. Let .
If then
If , define .
If , let be the distance in .
Lemma 6.4.
Let be the map given by Section 6.1. Let be a vertex in and let . Let , , and be the boundary lines of associated to distinct edges and respectively. Then we have
| (17) |
Proof.
Note that , , and are the projection of planes , , of into the factor . We prove (17) case by case, according to the configuration of with .
Case 1. . By Definition 5.3 of projection maps, the projection of to is the same as that of to , and the projection of to is the same as that of to . That is to say, . Hence, the Equation (17) follows by Lemma 5.5: for any
Case 2. or . We only consider the case and analyze the configuration of with . The analyze for the case for and is symmetric.
6.2.3. Upper bound of
Let and be the maps defined in Section 6.1. We now have prepared all ingredients for the proof of the following result.
Proposition 6.5.
Let and be the geodesic in . Then
| (18) |
6.2.4. Upper bound of
The horizontal distance defined in (2) of the special path from to records the totality of the projected distances to the base hyperbolic spaces :
where the map defined in Section 6.1 sends a point in to the hyperbolic base .
Before moving on, let us introduce more notations to represent the horizontal distance. Let and so that is orthogonal to , and to . Choose so that is a geodesic in orthogonal to and . Thus,
| (19) |
Recall that are the coned-off spaces defined in Section 4.1. By Definition 4.3 of the -thick distance of for any and the Remark after it, we have
| (20) |
where defined in (3) is the -thick distance on the coned-off space . The map defined in Section 6.1 sends a point in to the hyperbolic cone point to the boundary line (recall that is chosen on a common boundary plane ).
Hence, the –thick distance (20) differs from the horizontal distance (19) by the amount coned-off on boundary lines. The purpose of this subsection is to recover the loss in the coned-off from the projection system of fiber lines.
Lemma 6.6.
For any , we have
where the index is chosen if is odd, otherwise .
Proof.
We consider the equation (19) for the horizontal distance . Let be the set of boundary lines of corresponding to the set of oriented edges (i.e., the collection ). By Lemma 3.1, for each , we have
| (21) |
for any sufficiently large .
Let and be the corresponding boundary line of . Set if is odd, otherwise .
If or for , then
since is orthogonal to .
We remark that when (the case is similar), it is possible that may not be perpendicular to . However, we have
We now have prepared all ingredients in the proof of Proposition 6.1.
Proof of Proposition 6.1.
Since , (with ) are -equivariant maps, it follows that is a -equivariant map. Since the orbital map of any isometric action is Lipschitz (e.g. see [BH99, Lemma I.8.18]), it suffices to give an upper bound on .
Let be the constant given by Lemma 6.2, so that
Appropriate upper bounds of the vertical distance and the horizontal distance have been already treated in Proposition 6.5 and Lemma 6.6 respectively. They are
and
where the index depends on : if is odd, otherwise . The above two inequalities yield:
By ( ‣ 6.2.2), we have
It follows that
Plugging the thick distance formula (20) into the above inequality, we obtain
As , it is a consequence from the above inequality that the map in ( ‣ 6.1) is a –equivariant quasi-isometric embedding from to . The proof of Proposition is complete. ∎
7. Proof of Theorem 1.3
Let be a CKA action such that for every vertex group the central extension (1) has omnipotent hyperbolic quotient group. Let be the subgroup of the index at most preserving and given by Lemma 2.23. Upon passing to further finite index subgroups in Lemma 4.8, we obtain a finite index subgroup of such that the results in Section 5 and Section 6 hold for . We caution the reader that at the beginning of Section 5 we assume that each vertex group of is a direct product, this assumption may not hold for the original , but holds in the finite index subgroup of .
As is a subgroup of , it follows from Proposition 4.7 that there exists a –equivariant quasi-isometric embedding
Applying Proposition 6.1 to , we have a –equivariant quasi-isometric embedding
It implies that is a –equivariant quasi-isometric embedding from to the finite product of quasi-trees . Thus has property (QT), implying has property (QT).
8. Applications: Property (QT) of 3-manifold groups
In this section, we apply results obtained in previous sections to give a complete characterization of property (QT) of all finitely generated 3-manifold groups (Theorem 1.1). Note that property (QT) is a commensurability invariant. Hence, we can always assume that all 3-manifolds are compact, orientable (by taking Scott’s compact core and double cover).
Let be a compact, connected, orientable, irreducible 3-manifold with empty or tori boundary. is called geometric if its interior admits geometric structures in the sense of Thurston, that are , , , , , , Nil and Sol. If is not geometric, then is called a nongeometric –manifold. By geometric decomposition of –manifolds, there is a nonempty minimal union of disjoint essential tori and Klein bottles, unique up to isotopy, such that each component of is either a Seifert fibered piece or a hyperbolic piece. is called graph manifold if all the pieces of are Seifert pieces, otherwise it is a mixed manifold.
We remark here that the geometric decomposition is slightly different from the torus decomposition, but they are closely related (if has no decomposing Klein bottle, then these two decompositions agree with each other). Such a difference can be got rid of by passing to some finite cover of . Since we are only interested in virtual properties of –manifolds in this paper, we can always assume that these two decompositions agree with each other (on some finite cover of ).
8.1. Property (QT) of geometric 3-manifolds
Proposition 8.1.
The fundamental group of a geometric –manifold has property (QT) if and only if does not support Sol and Nil geometry.
Proof.
We are going to prove the necessity. Assume that has property (QT). By Lemma 2.5, does not contain any distorted element, while the fundamental group of a 3-manifold with Nil geometry or Sol geometry contains quadratically/exponentially distorted elements (for example, see [NS20, Proposition 1.2]). Hence, does not support Sol or Nil geometry.
Now, we are going to prove sufficiency. If supports geometry , then is virtually abelian so has property (QT). If the geometry of is then is virtually covered by for some hyperbolic surface . Note that is a residually finite hyperbolic group so it has property (QT) by [BBF19, Theorem 1.1]. Hence, has property (QT). Since is a finite index subgroup of , it follows that has property (QT) by Lemma 2.3. If supports geometry , is virtually compact special by deep theorems of Agol and Wise (see [Ago13] [Wis20]), thus has property (QT).
Finally, we need to show that if supports geometry then has property (QT). To see this, by passing to a finite cover if necessary, we could assume that is a nontrivial circle bundle over a closed surface with . Let be the short exact sequence associated with the circle bundle where is the normal cyclic subgroup of generated by a fiber. Let be the surjective homomorphism in the above short exact sequence. Note that the short exact sequence does not split since is supporting geometry. According to the first paragraph in the proof of [HRSS22, Corollary 4.3], there exists a generating set of so that is a quasi-line. Moreover, the diagonal action of on is metrically proper and cobounded, and thus its orbital map is a quasi-isometry. Since is a residually finite hyperbolic group, it follows from [BBF19] that has property (QT). Hence there exists a finite product of quasi-trees such that so that its orbital map is a quasi-isometric embedding. It is easy to see that the orbital map of the diagonal action of on the product is a quasi-isometric embedding. Therefore has property (QT). ∎
8.2. Property (QT) of nongeometric 3-manifolds
In this section, we are going to prove Theorem 1.2. Recall that a nongeometric 3-manifold is either a graph manifold or a mixed manifold.
8.2.1. property (QT) of graph manifolds
Let be a graph manifold. Since property (QT) is preserved undertaking finite index subgroups (see Lemma 2.3), we only need to show that a finite cover of has property (QT). By passing to a finite cover, we can assume that each Seifert fibered piece in the JSJ decomposition of is a trivial circle bundle over a hyperbolic surface of genus at least , and the intersection numbers of fibers of adjacent Seifert pieces have absolute value (see[KL98, Lemma 2.1]). Also we can assume that the underlying graph of the graph manifold is bipartite since any non-bipartite graph manifold is double covered by a bipartite one.
We note that is an admissible group in the sense of Definition 2.12. However, it is not always true that can acts geometrically on a CAT(0) space so property (QT) in this case does not follow immediately from Theorem 1.3. Indeed, if is a graph manifold with nonempty boundary then it always admits a Riemannian metric of nonpositive curvature (see [Lee95]). In particular, is a CKA action, and thus property (QT) of follows from Theorem 1.3. However, many closed graph manifolds are shown to not support any Riemannian metric of nonpositive curvature (see [Lee95]).
Metrics on :
We now are going to describe a convenient metric on introduced by Kapovich–Leeb [KL98]. For each Seifert component of , we choose a hyperbolic metric on the base surface so that all boundary components are totally geodesic of unit length, and then equip each Seifert component with the product metric such that the fibers have length one. Metrics on induce the product metrics on which by abuse of notations is also denoted by .
Let and be adjacent Seifert components in the closed graph manifold , and let be a JSJ torus. Each metric space and is a Euclidean plane. After applying a homotopy to the gluing map, we may assume that at each JSJ torus , the gluing map from the boundary torus to the boundary torus is affine in the sense that the identity map is affine. We now have a product metric on each Seifert component . These metrics may not agree on the JSJ tori but the gluing maps are bilipschitz (since they are affine). The product metrics on the Seifert components induce a length metric on the graph manifold denoted by (see [BBI01, Section 3.1]) for details). Moreover, there exists a positive constant such that on each Seifert component we have
for all and in . (See [Pau05, Lemma 1.8] for detailed proof of the last claim.) Metric on induces metric on , which is also denoted by (by abuse of notations). Then for all and in we have
Remark 8.2.
Note that the space may not be a CAT(0) space but acts geometrically on via deck transformations.
Special paths on :
Lift the JSJ decomposition of the graph manifold to the universal cover , and let be the tree dual to this decomposition of (i.e., the Bass-Serre tree of ). For every pair of adjacent edges , in , let be the common vertex of and . Let and be two boundary lines of corresponding to the edges and respectively. Let be the shortest geodesic joining and in . This geodesic determines an Euclidean strip in . Let be a point in and be an edge with an endpoint . The minimal geodesic from to the plane also define a strip in where is the projection to of this minimal geodesic.
Now, let and be any two points in the universal cover of such that and belong to the interiors of pieces and respectively. If then we define a special path in connecting and to be the geodesic in . Otherwise, let be the geodesic edge path connecting and . For notational purpose, we write and . Let be the intersection point of the strips and . The special path connecting and is the concatenation of the geodesics
We label and .
Proposition 8.3.
If is a graph manifold, then has property (QT).
Proof.
If is a non-positively curved graph manifold (for example, when has nonempty boundary) then the fact has property (QT) is followed from Theorem 1.3. The only case that does not follow directly from Theorem 1.3 is when is a closed graph manifold (recall many closed graph manifolds are non-positively curved but many are not). Since the metric on restricted to each piece is –bilipschitz equivalent to , so the inequalities in Section 6 are slightly changed by a uniform multiplicative constant. For example, the statement (or ) in Section 6 will be changed to (or ) for some constant depending on . Thus, the proof, in this case, is performed along lines with the proof of Theorem 1.3. ∎
8.2.2. property (QT) of mixed 3-manifolds
Recall that a non-geometric 3-manifold with empty or tori boundary is either a graph manifold or a mixed 3-manifold. The case of graph manifold has been addressed in Section 8.2.1. In this section, we address the mixed 3-manifold case.
Proposition 8.4.
The fundamental group of a mixed 3-manifold has property (QT).
The fundamental group of a mixed 3-manifold has a natural relatively hyperbolic structure as follows: Let be the maximal graph manifold pieces, isolated Seifert fibered components of the JSJ-decomposition of , and be the tori in not contained in any . The fundamental group is hyperbolic relative to the set of parabolic subgroups
The following lemma provides many separable subgroups in , generalizing [Sun21, Lemma 3.3]. The proof uses a recent result of the second author and Sun in [NS20] where the authors show that separability and distortion of subgroups in 3-manifold groups are closely related.
Lemma 8.5.
Let be a compact, orientable, irreducible, 3-manifold with empty or tori boundary, with nontrivial torus decomposition and does not support the Sol geometry. If is a finitely generated, undistorted subgroup of , then is separable in .
Proof.
Let be the covering space of corresponding to . Generalizing a notion called “almost fiber part” in [Liu17], an embedded (possibly disconnected) subsurface in called “almost fiber surface” is introduced in [Sun20]. Sun shows in [Sun20, Theorem 1.3] that all information about the separability of can be obtained by examining the almost fibered surface.
In [NS20], the authors introduce a notion called “modified almost fibered surface” (denoted ) that modify slightly the original definition of almost fibered surface in [Sun20] and show that information about the distortion of in can be also obtained by examining the “modified almost fibered surface”. We refer the reader to [Sun20] for the definition of the almost fiber surface and to [NS20] for the definition of the modified almost fiber surface. The precise definitions are not needed here, so we only state here some facts from [NS20] that will be used later in the proof.
The torus decomposition of induces the torus decomposition of . Let and be the almost fiber surface and modified almost fiber surface of respectively.
-
(1)
Both the almost fiber surface and the modified almost fiber surface are (possibly disconnected) subsurfaces of .
-
(2)
The almost fiber surface has some piece that is homeomorphic to the annulus and parallel to the boundary of . We delete these annulus pieces from to get the modified almost fiber surface, and we denote it by .
The surface (resp. ) has a natural graph of spaces structure with the dual graph denoted by (resp. ). By [NS20, Theorem 1.4], every component of the modified almost fiber surface must contain only one piece (otherwise, the distortion of in is at least quadratic, this contradicts the fact that is undistorted in ). This fact combined with (2) implies that the graph is a union of trees. By [Sun20, Theorem 1.3] (or see also [Sun21, Theorem 3.2] for a statement) tells us that whenever does not contain a simple cycle then is separable. As shown above, we are in this case, hence we conclude that the subgroup is separable in . ∎
We now give the proof of Proposition 8.4.
Proof of Proposition 8.4.
Let be the collection of maximal graph manifold components and Seifert fibered pieces in the geometric decomposition of . Let be the tori in the boundary of that bound a hyperbolic piece, and let be the tori in the JSJ decomposition of that separate two hyperbolic components of the JSJ decomposition. Then is hyperbolic relative to
We are going to show that satisfies all conditions in Theorem 1.5.
Claim 1: induces the full profinite topology on each . Indeed, it is well-known that the fundamental groups of all compact 3-manifolds are residually finite, thus is residually finite. Since each peripheral subgroup is undistorted in , it follows from Lemma 8.5 that is separable in . Again, by Lemma 8.5, each finite index subgroup of is also separable in . By [Rei18, Lemma 2.8], induces the full profinite topology on .
Claim 2: For each peripheral subgroup , there exists a finite index subgroup of acting isometrically on a finite number of quasi-trees so that the diagonal action of on the finite product of these quasi-trees induces quasi-isometric embeddings on orbital maps. Indeed, if or for some then , we denote . If for some Seifert component then . In this case, as is a hyperbolic surface with nonempty boundary, we have is a free group, hence we choose as is a quasi-tree. The last case we must consider is that where is a maximal graph manifold component. Passing to an appropriate finite cover we could assume that acts on a finite number of quasi-trees (but they are not quasi-lines) ’s so that the orbital map induced from the diagonal action is a quasi-isometric embedding (see Proposition 8.3). Claim 2 is confirmed. We then repeat the proof of Theorem 3.5 (the second and third paragraph) to show that satisfies the hypothesis of Theorem 1.5.
In summary, we have verified the hypotheses in Theorem 1.5 for , so mixed 3-manifold groups have property (QT). ∎
We now give the proof of Theorem 1.2.
Proof of Theorem 1.2.
Let be a compact orientable irreducible 3-manifold with empty or tori boundary, with nontrivial torus decomposition, and that does not support the Sol geometry. Such a 3-manifold is either a graph manifold or a mixed manifold. The graph manifold case and mixed manifold case have been addressed in Proposition 8.3 and Proposition 8.4 respectively, and hence the theorem is proved. ∎
8.3. Property (QT) of finitely generated 3-manifolds
Proposition 8.6.
Let be a compact, orientable, irreducible, –irreducible 3-manifold such that it has a boundary component of genus at least . Then has property (QT).
Proof.
We consider the following two cases:
Case 1: has trivial torus decomposition. In this case, supports a geometrically finite hyperbolic structure with infinite volume. We paste hyperbolic 3-manifolds with totally geodesic boundaries to to get a finite volume hyperbolic 3-manifold . By the Covering Theorem (see [Can96]) and the Subgroup Tameness Theorem (see [Ago04], [CG06]), a finitely generated subgroup of the finite volume hyperbolic 3-manifold is either a virtual fiber surface subgroup or undistorted. By the construction of , the subgroup could not be a virtual fiber surface subgroup, and thus must be undistorted in . Since has property (QT), it follows that has property (QT) (see Lemma 2.3).
Case 2: We now assume that has nontrivial torus decomposition. By [Sun20, Section 6.3], we paste hyperbolic 3-manifolds with totally geodesic boundaries to to get a 3-manifold with empty or tori boundary. The new manifold satisfies the following properties.
-
(1)
is a submanifold of with incompressible tori boundary.
-
(2)
The torus decomposition of also gives the torus decomposition of .
-
(3)
Each piece of with a boundary component of genus at least is contained in a hyperbolic piece of .
In particular, it follows from (2) and (3) that is a mixed 3-manifold. The subgroup sits nicely in . By the proof of Case 1.2 in the proof of [NS20, Theorem 1.3]), we have that is undistorted in (even more than that, is strongly quasiconvex in (see [NTY21]). Note that has property (QT) by Proposition 8.4. Since is undistorted in and has property (QT), it follows that has property (QT). ∎
We now give the proof of Theorem 1.1 which gives a complete characterization of property (QT) for finitely generated 3-manifolds groups.
Proof of Theorem 1.1.
Since is a compact, orientable –manifold, it decomposes into irreducible, –irreducible pieces by the sphere-disc decomposition. In particular, is the free product for some free group . We remark here that is hyperbolic relative to the collection where .
We are going to prove the necessity. Assume that has property (QT). Since is undistorted in , it follows that has property (QT) (see Lemma 2.3). By Proposition 8.1, does not support Sol and Nil geometry.
Now, we are going to prove sufficiency. Assume that there is no piece that supports either Sol or Nil geometry. We would like to show that has property (QT). In this case, we observe that each peripheral subgroup has property (QT). Indeed, a free group of course has property (QT), so let us now assume that for some . If has a boundary component of genus at least then property (QT) of follows from Proposition 8.6. Otherwise, has empty or tori boundary. Then the property (QT) of follows from Proposition 8.1 for geometric manifolds, Proposition 8.3 for graph manifolds, and Proposition 8.4 for mixed graph manifolds.
We are going to show that satisfies all conditions in Theorem 1.5. The proof is similar to the proof of Proposition 8.4 with minor changes.
Claim 1: induces the full profinite topology on each . It is well-known that the fundamental groups of all compact 3-manifolds are residually finite, thus is residually finite and its finite index subgroups are residually finite as well. Any finite index subgroup of is separable in the free product by [Bur71, Theorem 1.1]. Hence it follows from [Rei18, Lemma 2.8 ] that induces the full profinite topology on .
Claim 2: For each peripheral subgroup , there exists a finite index subgroup of acting isometrically on a finite number of quasi-trees, so that the diagonal action of on the finite product of these quasi-trees induces quasi-isometric embeddings on orbital maps. Indeed, the claim obviously holds for or . The claim also holds for where is a geometric 3-manifold. The case of graph manifolds is proved in the Claim 2 of the proof of Proposition 8.4. The only case left is when is a mixed 3-manifold or has a boundary component with genus at least . It has been shown in Proposition 8.6 that if has a boundary component with genus at least then it is an undistorted subgroup in a mixed 3-manifold. Therefore it suffices to consider only the mixed 3-manifold case. Recall that in the proof of Proposition 8.4, we show that there exists a finite index subgroup of such that it is a relatively hyperbolic group, satisfying conditions in Theorem 1.5, and thus Claim 2 is confirmed.
With Claim 1 and Claim 2, we use the same argument as in the proof of Theorem 3.5 (see the second and third paragraph) to find a finite index normal subgroup of such that is hyperbolic relative to a collection of subgroups satisfying the hypotheses in Theorem 1.5, and thus has property (QT). Therefore, has property (QT) since is a finite index subgroup of and does have property (QT). ∎
References
- [ABO19] Carolyn Abbott, Sahana H. Balasubramanya, and Denis Osin. Hyperbolic structures on groups. Algebr. Geom. Topol., 19(4):1747–1835, 2019.
- [Ago04] Ian Agol. Tameness of hyperbolic 3-manifolds. arXiv Mathematics e-prints, page math/0405568, May 2004.
- [Ago13] I. Agol. The virtual Haken conjecture. Doc. Math., 18:1045–1087, 2013. With an appendix by Agol, Daniel Groves, and Jason Manning.
- [Baj07] Jitendra Bajpai. Omnipotence of surface groups. Master’s thesis, McGill University, 2007.
- [BBF15] Mladen Bestvina, Ken Bromberg, and Koji Fujiwara. Constructing group actions on quasi-trees and applications to mapping class groups. Publ. Math. Inst. Hautes Études Sci., 122:1–64, 2015.
- [BBF19] Mladen Bestvina, Kenneth Bromberg, and Koji Fujiwara. Proper actions on finite products of quasi-trees. arXiv e-prints, page arXiv:1905.10813, May 2019.
- [BBFS19] Mladen Bestvina, Ken Bromberg, Koji Fujiwara, and Alessandro Sisto. Acylindrical actions on projection complexes. Enseign. Math., 65(1-2):1–32, 2019.
- [BBI01] D. Burago, Y. Burago, and S. Ivanov. A course in metric geometry, volume 33 of Graduate Studies in Mathematics. American Mathematical Society, Providence, RI, 2001.
- [BH99] Martin R. Bridson and André Haefliger. Metric spaces of non-positive curvature, volume 319 of Grundlehren der Mathematischen Wissenschaften [Fundamental Principles of Mathematical Sciences]. Springer-Verlag, Berlin, 1999.
- [Bow08] Brian H. Bowditch. Tight geodesics in the curve complex. Invent. Math., 171(2):281–300, 2008.
- [Bow12] B. H. Bowditch. Relatively hyperbolic groups. Internat. J. Algebra Comput., 22(3):1250016, 66, 2012.
- [Bur71] R. G. Burns. On finitely generated subgroups of free products. J. Austral. Math. Soc., 12:358–364, 1971.
- [But20] J. O. Button. Groups acting purely loxodromically on products of hyperbolic graphs, 2020.
- [BW13] Hadi Bigdely and Daniel T. Wise. Quasiconvexity and relatively hyperbolic groups that split. Michigan Math. J., 62(2):387–406, 2013.
- [Can96] Richard D. Canary. A covering theorem for hyperbolic -manifolds and its applications. Topology, 35(3):751–778, 1996.
- [CCMT15] Pierre-Emmanuel Caprace, Yves Cornulier, Nicolas Monod, and Romain Tessera. Amenable hyperbolic groups. J. Eur. Math. Soc. (JEMS), 17(11):2903–2947, 2015.
- [CG06] Danny Calegari and David Gabai. Shrinkwrapping and the taming of hyperbolic 3-manifolds. J. Amer. Math. Soc., 19(2):385–446, 2006.
- [CK00] Christopher B. Croke and Bruce Kleiner. Spaces with nonpositive curvature and their ideal boundaries. Topology, 39(3):549–556, 2000.
- [CK02] C. B. Croke and B. Kleiner. The geodesic flow of a nonpositively curved graph manifold. Geom. Funct. Anal., 12(3):479–545, 2002.
- [Con00] Gregory R. Conner. Discreteness properties of translation numbers in solvable groups. J. Group Theory, 3(1):77–94, 2000.
- [Dah03] François Dahmani. Combination of convergence groups. Geom. Topol., 7:933–963, 2003.
- [dC08] Yves de Cornulier. Dimension of asymptotic cones of Lie groups. J. Topol., 1(2):342–361, 2008.
- [DJ99] A. Dranishnikov and T. Januszkiewicz. Every Coxeter group acts amenably on a compact space. In Proceedings of the 1999 Topology and Dynamics Conference (Salt Lake City, UT), volume 24, pages 135–141, 1999.
- [DK18] Cornelia Druţu and Michael Kapovich. Geometric group theory, volume 63 of American Mathematical Society Colloquium Publications. American Mathematical Society, Providence, RI, 2018. With an appendix by Bogdan Nica.
- [DS05] Cornelia Druţu and Mark Sapir. Tree-graded spaces and asymptotic cones of groups. Topology, 44(5):959–1058, 2005. With an appendix by Denis Osin and Mark Sapir.
- [FL08] Thomas Foertsch and Alexander Lytchak. The de Rham decomposition theorem for metric spaces. Geom. Funct. Anal., 18(1):120–143, 2008.
- [GP16] Victor Gerasimov and Leonid Potyagailo. Quasiconvexity in relatively hyperbolic groups. J. Reine Angew. Math., 710:95–135, 2016.
- [Ham01] Emily Hamilton. Abelian subgroup separability of Haken 3-manifolds and closed hyperbolic -orbifolds. Proc. London Math. Soc. (3), 83(3):626–646, 2001.
- [HO13] Michael Hull and Denis Osin. Induced quasicocycles on groups with hyperbolically embedded subgroups. Algebr. Geom. Topol., 13(5):2635–2665, 2013.
- [HP15] Mark F. Hagen and Piotr Przytycki. Cocompactly cubulated graph manifolds. Israel J. Math., 207(1):377–394, 2015.
- [HRSS22] Mark Hagen, Jacob Russell, Alessandro Sisto, and Davide Spriano. Equivariant hierarchically hyperbolic structures for 3-manifold groups via quasimorphisms, 2022.
- [HW08] Frédéric Haglund and Daniel T. Wise. Special cube complexes. Geom. Funct. Anal., 17(5):1551–1620, 2008.
- [KL96] Michael Kapovich and Bernhard Leeb. Actions of discrete groups on nonpositively curved spaces. Math. Ann., 306(2):341–352, 1996.
- [KL98] M. Kapovich and B. Leeb. -manifold groups and nonpositive curvature. Geom. Funct. Anal., 8(5):841–852, 1998.
- [Lee95] Bernhard Leeb. -manifolds with(out) metrics of nonpositive curvature. Invent. Math., 122(2):277–289, 1995.
- [Liu17] Yi Liu. A characterization of virtually embedded subsurfaces in 3-manifolds. Trans. Amer. Math. Soc., 369(2):1237–1264, 2017.
- [Man05] Jason Fox Manning. Geometry of pseudocharacters. Geom. Topol., 9:1147–1185, 2005.
- [Man06] J. F. Manning. Quasi-actions on trees and property (QFA). J. London Math. Soc. (2), 73(1):84–108, 2006. With an appendix by N. Monod and B. Rémy.
- [MM00] H. A. Masur and Y. N. Minsky. Geometry of the complex of curves. II. Hierarchical structure. Geom. Funct. Anal., 10(4):902–974, 2000.
- [MS13] John M. Mackay and Alessandro Sisto. Embedding relatively hyperbolic groups in products of trees. Algebr. Geom. Topol., 13(4):2261–2282, 2013.
- [NS20] Hoang Thanh Nguyen and Hongbin Sun. Subgroup distortion of 3-manifold groups. Trans. Amer. Math. Soc., 373(9):6683–6711, 2020.
- [NTY21] Hoang Thanh Nguyen, Hung Cong Tran, and Wenyuan Yang. Quasiconvexity in 3-manifold groups. Math. Ann., 381(1-2):405–437, 2021.
- [NY] Hoang Thanh Nguyen and Wenyuan Yang. Croke-kleiner admissible groups: Property (qt) and quasiconvexity. To appear in Michigan Math. J.
- [Osi16] D. Osin. Acylindrically hyperbolic groups. Trans. Amer. Math. Soc., 368(2):851–888, 2016.
- [Pau05] G. Paulik. Gluing spaces and analysis. Bonner Mathematische Schriften [Bonn Mathematical Publications], 372. Universität Bonn, Mathematisches Institut, Bonn, 2005. Dissertation, Rheinische Friedrich-Wilhelms-Universität Bonn, Bonn, 2005.
- [PW18] Piotr Przytycki and Daniel T. Wise. Mixed 3-manifolds are virtually special. J. Amer. Math. Soc., 31(2):319–347, 2018.
- [Rei18] Alan W. Reid. Profinite rigidity. In Proceedings of the International Congress of Mathematicians—Rio de Janeiro 2018. Vol. II. Invited lectures, pages 1193–1216. World Sci. Publ., Hackensack, NJ, 2018.
- [Sis13] Alessandro Sisto. Projections and relative hyperbolicity. Enseign. Math. (2), 59(1-2):165–181, 2013.
- [Sun20] Hongbin Sun. A characterization on separable subgroups of 3-manifold groups. J. Topol., 13(1):187–236, 2020.
- [Sun21] Hongbin Sun. All finitely generated 3-manifold groups are Grothendieck rigid. arXiv e-prints, page arXiv:2103.00547, February 2021.
- [Tid18] Joseph Tidmore. Cocompact cubulations of mixed 3-manifolds. Groups Geom. Dyn., 12(4):1429–1460, 2018.
- [Wis00] Daniel T. Wise. Subgroup separability of graphs of free groups with cyclic edge groups. Q. J. Math., 51(1):107–129, 2000.
- [Wis20] Daniel T. Wise. The Structure of Groups with a Quasiconvex Hierarchy, volume AMS-209. Annals of Mathematics Studies, 2020.
- [Yan19] Wen-yuan Yang. Statistically convex-cocompact actions of groups with contracting elements. Int. Math. Res. Not. IMRN, (23):7259–7323, 2019.