[1]
Prompt-augmented Temporal Point Process for Streaming Event Sequence
Abstract
Neural Temporal Point Processes (TPPs) are the prevalent paradigm for modeling continuous-time event sequences, such as user activities on the web and financial transactions. In real-world applications, event data is typically received in a streaming manner, where the distribution of patterns may shift over time. Additionally, privacy and memory constraints are commonly observed in practical scenarios, further compounding the challenges. Therefore, the continuous monitoring of a TPP to learn the streaming event sequence is an important yet under-explored problem. Our work paper addresses this challenge by adopting Continual Learning (CL), which makes the model capable of continuously learning a sequence of tasks without catastrophic forgetting under realistic constraints. Correspondingly, we propose a simple yet effective framework, PromptTPP111Our code is available at https://github.com/yanyanSann/PromptTPP., by integrating the base TPP with a continuous-time retrieval prompt pool. The prompts, small learnable parameters, are stored in a memory space and jointly optimized with the base TPP, ensuring that the model learns event streams sequentially without buffering past examples or task-specific attributes. We present a novel and realistic experimental setup for modeling event streams, where PromptTPP consistently achieves state-of-the-art performance across three real user behavior datasets.
1 Introduction
Event sequences are ubiquitous in a wide range of applications, such as healthcare, finance, social media, and so on. Neural TPPs (Mei & Eisner, 2017; Shchur et al., 2020; Zuo et al., 2020; Zhang et al., 2020; Yang et al., 2022) have emerged as the dominant paradigm for modeling such data, thanks to their ability to leverage the rich representation power of neural networks. However, most existing works assume a static setting, where the TPP model is trained on the entire data, and parameters remain fixed after training. In contrast, real-world event data usually arrives in a streaming manner, rendering it impractical to store all data and retrain the model from scratch at each time step due to computational and storage costs. Shown in Figure 1, a common approach is to use sliding windows to frame the data for model training and prediction. Traditional schemes include pretraining a TPP, which is used for all the following test periods, retraining TPP on the data of each slide of windows and online TPPs. However, they either may fail to adapt to new data or suffer from catastrophic forgetting (see Appendix A for an empirical analysis).
In our work, we approach the problem by adopting Continual Learning (CL) (Hadsell et al., 2020; Hao et al., 2023; Chu & Li, 2023; Chu et al., 2023b), a relevant area studying how systems learn sequentially from a continuous stream of correlated data. Yet, classical CL models are not fully applicable to our problem. A major line of CL methods (Cha et al., 2021; Buzzega et al., 2020) rely on a rehearsal buffer to retrain a portion of past examples. However, they become ineffective when a rehearsal buffer is not allowed – for example, in real-world scenarios where data privacy matters (Shokri & Shmatikov, 2015) or there are resource constraints. Another branch of works (Ke et al., 2020) bypass the forgetting issue by assuming known task identity at test time, but knowing task identity at test time restricts practical usage. Furthermore, the problem of sequential tasks of event sequence in continuous time have barely been studied.

To develop a CL algorithm for such data in real-world scenarios with applicability and generality, we draw inspiration from recent advances in prompt-augmented learning (Liu et al., 2022a; Varshney et al., 2022; Cho et al., 2022; Li et al., 2023; Chu et al., 2023a; Wang et al., 2023). Prompt-augmented learning is a form of machine learning that involves adding additional information or prompts to the training data in order to further improve the performance of the model. This can include adding labels or annotations to the data, providing additional context to help the model better understand the data, or incorporating feedback from human experts to guide the learning process. By incorporating these prompts, the model is able to learn more effectively and make more accurate predictions. Prompt-augmented learning has been used successfully in a variety of applications, including natural language processing, computer vision, and speech recognition. Intuitively, prompt-augmented learning reformulates learning downstream tasks from directly adapting model weights to designing prompts that “instruct” the model to perform tasks conditionally while maintaining model plasticity. Thus, it is promising to leverage prompts to sequentially learn knowledge and further store learned knowledge of event sequence in the CL context. While prompt learning (Wang et al., 2022b, a) already demonstrates its effectiveness on multiple CL benchmarks in language modeling, we wish to extend their success to the models of neural TPPs.
To this end, we propose PromptTPP, a novel CL framework whose basis is a continuous-time retrieval prompt pool for modeling streaming event sequences. Specifically, we develop a module of temporal prompt that learns knowledge and further store the learned knowledge for event sequences in continuous time. To improve the applicability, building upon prior works (Wang et al., 2022b), we structure the prompts in a key-value shared memory space called the retrieval prompt pool, and design a retrieval mechanism to dynamically lookup a subset of task-relevant prompts based on the instance-wise input of event sequences. The retrieval prompt pool, which is optimized jointly with the generative loss, ensures that shared (unselected) prompts encode shared knowledge for knowledge transfer, and unshared (selected) prompts encode task-specific knowledge that helps maintain model plasticity. PromptTPP has two distinctive characteristics: (i) applicability: despite the effectiveness in augmenting TPP with CL, the prompt pool and the event retrieval mechanism removes the necessity of a rehearsal buffer and knowing the task identity, making the method applicable to modeling the event streams in a more realistic CL setting, i.e., memory efficient and task agnostic. (ii) generality: our approach is general-purpose in the sense that it can be integrated with any neural TPPs. In summary, our main contributions are:
-
•
We introduce PromptTPP, a novel prompt-augmented CL framework for neural TPPs. It represents a new approach to address the challenges of modeling streaming event sequences by learning a pool of continuous-time retrieval prompts. These prompts serve as parameterized instructions for base TPP models to learn tasks sequentially, thus enhancing the performance of the model.
-
•
We formalize an experimental setup for evaluating the streaming event sequence in the context of CL and demonstrate the effectiveness of our proposed method across three real user datasets.
-
•
By connecting the fields of TPP, CL, and prompt learning, our method provides a different perspective for solving frontier challenges in neural TPPs.
2 Preliminaries
Generative Modeling of Event Sequences. Suppose we observe events at a fixed time interval . Each event is denoted mnemonically as (i.e., “type e at time t”) and the sequence is denoted as where and is a discrete event type. Note that representations in terms of time and the corresponding inter-event time are isomorphic, we use them interchangeably.
Generative models of event sequences are TPPs. Specifically, TPPs define functions that determine a finite intensity for each event type at each time such that . Then the log-likelihood of a TPP given the entire event sequence is
| (1) |
Instead of posing strong parametric assumptions on the intensity function, neural TPPs (Du et al., 2016; Mei & Eisner, 2017; Zhang et al., 2020; Zuo et al., 2020; Yang et al., 2022) use expressive representations for the intensity function via neural networks and maximize the associated log-likelihood equation 1 via stochastic gradient methods.
CL Problem Formulation for Streaming Event Sequences. The typical CL problem is defined as training models on a continuum of data from a sequence of tasks. Given a sequence , we split it based on a sliding window approach shown in Figure 1 and form a sequence of tasks over the time , where the -th task contains a tuple of train and test set of event sequences and the two sets have no overlap in time. Data from the previous tasks are not available when training for future tasks. We use the widely-adopted assumption that the task boundaries are clear and the task switch is sudden at training time (Pham et al., 2021). Our goal is to continually learn the sequences while avoiding catastrophic forgetting from the previous tasks.
Prompt Learning. Prompt learning methods propose to simply condition frozen language models (LMs) to perform down-stream tasks by learning prompt parameters that are prepended to the input tokens to instruct the model prediction. Compared with ordinary fine-tuning, literature shows In our context, a naive application of prompt learning is to prepend learnable parameters , called a prompt, to the event embedding , where denotes the output of a TPP’s embedding layer of an event, and then feed it to the model function , i.e., a decoder, to perform downstream tasks. Instead of the native application, in our proposed method, we design a novel prompt learning mechanism to properly model the event streams (see section 3.3).
3 Prompt-augmented TPP
We introduce a simple and general prompt-augmented CL framework for neural TPPs, named PromptTPP. As shown in Figure 2, PromptTPP consists of three components: a base TPP model, a pool of continuous-time retrieval prompts and a prompt-event interaction layer. In this section, we omit the task index in our notation as our method is general enough to the task-agnostic setting.
3.1 Base TPP
A neural TPP model autoregressively generates events one after another via neural networks. For the -th event , it computes the embedding of the event via an embedding layer, which takes the concatenation 222The sum operation is also used in some literature. In this paper, we apply concatenation for event embedding. of the type and temporal embedding where denotes concatenation operation and . Then one can draw the next event conditioned on the hidden states that encode history information sequentially:
| (2) |
where could be either RNN (Du et al., 2016; Mei & Eisner, 2017) or more expressive attention-based recursion layer (Zhang et al., 2020; Zuo et al., 2020; Yang et al., 2022). For the simplicity of notation, we denote the embedding layer and recursion layer together as the encoder parameterized by . Our proposed PromptTPP is general-purpose in the sense that it is straightforward to incorporate any version of neural TPP into the framework.
3.2 Continuous-time Retrieval Prompt Pool

The motivations for introducing Continuous-time Retrieval Prompt Pool (CtRetroPromptPool) are two-fold. First, existing prompt-learning works focus on classification tasks in NLP or CV domains, whose methods are not directly applicable for sequential tasks of learning event streams in continuous time (see section 4.2). Second, the practical setup for modeling event streams closes to the task-agnostic CL setting, where we do not know task identity at test time so that training task-dependent prompt is not feasible. Even if we use extra sources to memorize the task identity, naive usage of prompts (Liu et al., 2022b, 2021; Tam et al., 2022) are still found to result in catastrophic forgetting.
For the first motivation, we construct temporal prompt that properly encodes the knowledge of temporal dynamics of event sequence. To address the second, we build a store of prompts in a key-value shared space to transfer knowledge sequentially from one task to another without distinguishing between the common features among tasks versus the features that are unique to each task.
Temporal Prompt. In contrast to the standard prompt, the temporal prompt is a time-varying learnable matrix that encodes not only the structural but also the temporal knowledge of the event sequence. We define the temporal prompt , where is the prompt length and denotes the structural component and temporal component. While is a learnable submatrix, the temporal component is set to be continuous-time positional encodings of the estimated conditional time so as to consider the timing. More concretely, given -th event, we estimate the arithmetic mean of inter-event times up to , denoted by and add this estimated inter-event time to to get the estimated conditional time . Inline with Yang et al. (2022), we compute the temporal embedding by
| (3) |
where are hyperparameters selected according to the time scales in different periods. As is a vector, we concatenate it repeatedly to form , i.e, . Note that the structural component is learnable while the temporal component is computed deterministically.
An important consideration of employing such a mechanism is that the mean characterizes the most important property (the long-run average) of the inter-event time distribution, and the computation is straightforward. By taking the temporal embedding of the estimated average conditional time, the prompt efficiently encodes the time-varying knowledge up to the current event, which facilitates learning prediction tasks. We verify the effectiveness of temporal prompt in section 4.2.
From Prompt to Prompt Pool. Ideally, one would learn a model that is able to share knowledge when tasks are similar while maintaining knowledge independently otherwise. Thus, instead of applying a single prompt, we introduce a pool of temporal prompts to store encoded knowledge, which can be flexibly grouped as an input to the model. The pool is defined as
| (4) |
where denotes the total number of prompts and is a single temporal prompt. Following the notation in section 3.1, recall denotes the hidden representation of the -th event in the sequence 333As , we use and interchangeable throughout the paper. which encodes the event history up to via the recursion by equation 2 and let be a subset of selected prompts, we then incorporate them into the event sequences as in-context augmentation as follows:
| (5) |
Prompts are free to compose, so they can jointly encode knowledge for the model to process, which provides flexibility and generality in the sense that a more fine-grained knowledge sharing scheme can be achieved via prompt retrieval mechanism. Under this mechanism, a combination of prompts is selected for each task - similar inputs tend to share more common prompts, and vice versa.
Retrieval Prompt Pool. The retrieval prompt pool shares some design principles with methods in other fields, such as RETRO (Borgeaud et al., 2022). Specifically, the prompt pool is augmented to be a key-value store , defined as the set of learnable keys and values - temporal prompts in equation 4:
| (6) |
The retrieval prompt pool may be flexible to edit and can be asynchronously updated during the training procedure. The input sequence itself can decide which prompts to choose through query-key matching. Let be the cosine distance function to score the match between the query and prompt key. Given a query , the encoded event vector, we search for the closest keys over via maximum inner product search (MIPS). The subset of top-N selected keys is denoted as:
| (7) |
Importantly, the design of this strategy brings two benefits: (i) it decouples the query learning and prompt learning processes, which has been empirically shown to be critical (see section 4.2); (ii) the retrieval is performed in an instance-wise fashion, which makes the framework become task agnostic, meaning the method works without needing to store extra information about the task identity at test time. This corresponds to a realistic setting for modeling event streams in real applications.
3.3 Prompt-Event Interaction
The interaction operation controls the way we combine prompts with the encoded event states, which directly affects how the high-level instructions in prompts interact with low-level representations. Thus, we believe a well-designed prompting function is also vital for the overall CL performance. The interaction mechanism is also called prompting function in the NLP community. We apply the multi-head self-attention mechanism (Vaswani et al., 2017) (MHSA) for modeling the interactions and adopt the mainstream realization of prompting function - Prefix Tuning (Pre-T) (Li & Liang, 2021). Denote the input query, key, and values as and the MHSA layer is constructed as:
| (8) |
where are projection matrix. In our context, let be the retrieved prompts from the pool, we set to be the query, split each prompt into and prepend them to keys and values, respectively, while keeping the query as-is:
| (9) |
where ,. Apparently, the key and value and the output . Noted that there exist other prompting methods, such as Prompt Tuning (Pro-T), where all the prompts concurrently prepend to the query, key and values:
| (10) |
where . As a result, the query, key, value and output . Despite being less efficient in computation, we empirically demonstrate that Pre-T brings better performance. See Analysis III in section 4.2.
The output of the MHSA is then passed into an intensity layer (an MLP with softplus activation) to generate the intensity . For simplicity, we denote the prompt-event interaction and intensity layer together as the the decoder parameterized by .
3.4 Model Optimization
The full picture of PromptTPP at training and test time is described in Algorithm 1 and Algorithm 2 in section C.1. At every training step, each event is recursively fed into the encoder , after selecting prompts following the aforementioned retrieval strategy, the intensity is computed by the decoder . Overall, we seek to minimize the end-to-end loss function:
| (11) |
where the first term is the negative loglikelihood of the event sequence ( equals to defined in equation 1) and the second term refers to a surrogate loss to pull selected keys closer to corresponding query in the retrieval process. is a scalar to control the importance of the surrogate loss. Given the learned parameters, we may wish to make a minimum Bayes risk prediction about the next event via the thinning algorithm (Mei & Eisner, 2017; Yang et al., 2022).
Asynchronous Refresh of Prompt Pool. The prompts may lead to the variable contextual representation of the event as the parameters of the based model are continually updated. To accelerate training, we propose to asynchronously update all embeddings in the prompt pool every training epochs.
4 Experiments
4.1 Experimental setup
Datasets and Evaluation Setup We conduct our real-world experiments on three sequential user-behavior datasets. In each dataset, a sequence is defined as the records pertaining to a single individual. The Taobao (Alibaba, 2018) dataset contains time-stamped user click behaviors on Taobao shopping pages with the category of the item involved noted as the event type. The Amazon (Ni, 2018) dataset contains time-stamped records of user-generated reviews of clothing, shoes, and jewelry with the category of the reviewed product defined as the event type. The StackOverflow (Leskovec & Krevl, 2014) dataset contains two years of user awards on a question-answering website: each user received a sequence of badges with the category of the badges defined as the event type. See section D.1 for dataset details.
We partition Taobao and Amazon datasets into consecutively rolling slides (namely tasks) and partition the StackOverflow dataset into rolling slides (namely tasks). For the Taobao dataset, each slide covers approximately day of time; for the Amazon dataset, each slide covers years of time; for the StackOverflow dataset, each slide covers approximately 5 months time. The subset in each task is split into training, validation, and test sets with a , , ratio by chronological order. Each task has no overlap in the test set. For a detailed discussion, a demonstration of the evaluation process is provided in Figure 9 in section D.3.
Metrics. Following the common next-event prediction task in TPPs (Du et al., 2016; Mei & Eisner, 2017), each model attempts to predict every held-out event from its history . We evaluate the prediction with the error rate and evaluate the prediction with the RMSE.
Base models. While our proposed methods are amenable to neural TPPs of arbitrary structure, we choose two strong neural TPPs as our base models: NHP (Mei & Eisner, 2017) and AttNHP (Yang et al., 2022), an attention-based TPP whose performance is comparable to or better than that of the NHP as well as other attention-based models (Zuo et al., 2020; Zhang et al., 2020).


Competitors. With NHP and AttNHP as base models, we trained PromptNHP (Pt-NHP) and PromptAttNHP (Pt-ANHP) in the proposed prompt-augmented setup and compared with baselines.
-
•
PretrainedTPP. PretrainedNHP (Pre-NHP) and PretrainedAttNHP (Pre-ANHP) represent NHP and AttNHP learned at the first task (time step) and not trained any longer.
-
•
RetrainedTPP. RetrainedNHP (Re-NHP) and RetrainedAttNHP (Re-ANHP) refer to TPPs retrained at every sliding widow.
-
•
OnlineTPP. As there is no prior work on online neural TPPs, we use online Hawkes process OnlineMHP (O-TPP) (Yang et al., 2017), trained in an online manner without any consideration for knowledge consolidation.
-
•
CLTPP. The concurrent work (Dubey et al., 2022), to the best of our knowledge, is the only neural TPP with CL abilities proposed so far. Based on their work 444They have not published the code yet., we implement CL-NHP (CL-NHP) and CLAttNHP (CL-ANHP) as two variants of the hypernetwork-based CLTPPs.
Implementation and Training Details. For a fair comparison, they (except O-TPP which is a classical TPP model) are of similar model size (see Table 2 in section D.4). For Pt-NHP and Pt-ANHN, we set for both datasets. During training, we set by default and explore the effect of asynchronous training in Analysis IV of section 4.2. More details of the implementation and training of all the methods are in section D.5.
4.2 Results and Analysis
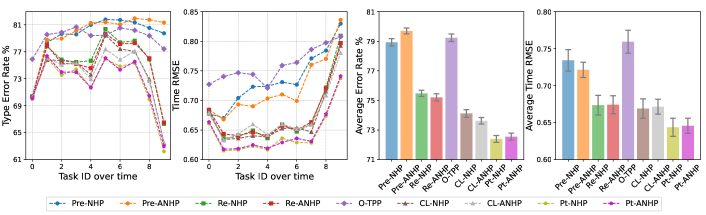
The main results are shown in Figure 3. Pre-NHP and Pre-ANHP work the worst in most cases because of inadequate ability to handle the distribution shift in the event sequence. Besides. O-TPP has a similarly poor performance because of two reasons: first it is a classical (non-neural) TPP with weaker representation power of modeling event sequence compared to its neural counterparts; second as a traditional online learning method, it easily loses memory of previously encountered data and suffers from catastrophic forgetting. Retraining at every task (Re-NHP and Re-ANHP) achieves moderate results but it also causes catastrophic forgetting. Not surprisingly, CL-NHP and CL-ANHP perform better than retraining, by applying a regularized hypernetwork to avoid forgetting. However, the hypernetwork relies on task descriptors built upon rich meta data, which limits its applicability and performance in our setup (and in real applications as well!). Lastly, our methods (both Pt-NHP and Pt-ANHP) work significantly better than all these baselines across the three datasets: they substantially beat the non-CL methods; they also consistently outperform CL-NHP and CL-ANHP by a relative margin on both metrics, thanks to our novel design of the CtRetroPromptPool, which successfully reduces catastrophic forgetting (see Analysis 0).

Analysis 0: How models perform on previous tasks after learning new events? We aim to validate that the improvement in performances indeed is due to the alleviation in catastrophic forgetting instead of simply a better fit on the current task. We use ANHP trained on task and Pt-ANHP continuously trained on task , re-evaluate them on previous tasks and see how the metrics changed. Specifically, on Figure 4,
(i) Each number on the curves of Re-ANHP and CL-ANHP corresponds to the performance difference on the test set of task using ANHP trained on task vs ANHP trained on task .
(ii) Each number on the curves of Pt-ANHP corresponds to the performance difference on the test set of task using Pt-ANHP trained until (including) task vs Pt-ANHP trained until task .
See from Figure 4, on both metrics, we see the drop in performance (i.e., error rate / RMSE increases) of Pt-ANHP is much less significant than ANHP, indicating Pt-ANHP stores well the knowledge of previous tasks, which largely alleviates catastrophic forgetting.






Analysis I: Does stronger base TPP model naively improve CL? Our method builds upon a backbone TPP and understanding this question is important for fair comparisons and future research. From Figure 3, Re-ANHP makes no consistent improvement against Re-NHP on average CL performance, which indicates a stronger TPP is not a solution for CL without being appropriately leveraged. Besides, for the CL-based methods, CL-ANHP is tied with CL-NHP on Taobao and makes a limited advancement against CL-NHP on Amazon, while Pt-NHP and Pt-ANHP perform closely on both datasets. Therefore, we can conclude that, although AttNHP is a more robust base model than common non attention-based TPP, i.e., NHP, it is not necessarily translated to CL performance.
Analysis II: Temporal prompt vs standard prompt. For a fair comparison, we initialize a pool of standard prompts without time-varying parameters by fixing their temporal components to be an all-ones matrix and incorporate it into the base model AttNHP. This method is named Pt-ANHP-std. With other components fixed, we compare Pt-ANHP-std with Pt-ANHP to validate the effectiveness of the temporal prompt introduced in section 3.2.
Figure 5(a) shows that Pt-ANHP achieves better performance on both datasets: the introduction of temporal prompts slightly improves the RMSE metric and reduces the error rate with a larger margin. We did the paired permutation test to verify the statistical significance of the improvements. See section D.6 for details. Overall, on both datasets, we find that the performance improvements by using the temporal prompts are enormously significant on error rate (p-value ) and weakly significant on RMSE (p-value ).
Analysis III: How to better attach prompts? We explore how to attach prompts and enhance their influences on overall performance. We compare three types of prompting: Naive Prompting (N-P), where the retrieval and prompting are performed after the event embedding layer: we replace with in equation 7, prepend the selected prompts to and pass it to the rest structure of TPP. Prompt Tuning (Pro-T): which concurrently prepend the prompts to query, key, and value, introduced at the end of section 3.3. Prefix-Tuning (Pre-T), proposed in the main body of section 3.3, which is the prompting method used in PromptTPP.
In Figure 5(b), we observe that Pre-T leads to better performance on both datasets compared to those two variants. Despite its empirically better performance, the architecture of Pre-T is actually more scalable and efficient when attached to multiple layers since it results in unchanged output size: remains the same size as the input while increases the size along the prompt length dimension.


Analysis IV: Efficiency of our method. We examine the efficiency of our method in two steps:
-
•
Firstly, seen from Table 2, on both datasets, Pt-NHP / Pt-ANHP leads to a / total parameter increase to the base model, which in fact causes a marginal impact on training speed: Figure 7(a) shows that learning curves of Re-ANHP and Pt-ANHP() converge at almost the same speed to achieve competitive log-likelihood, respectively.
-
•
Furthermore, to accelerate the training (especially when introducing large size prompts), we introduce the asynchronous refresh mechanism (see section 3.4) with prompts updated in a frequency (refresh the prompt pool less frequently). We observe in Figure 7(a) that Taobao training with has a comparable performance with while Amazon training with improves the convergence notably. leads to no advancement.
Overall, PromptTPP only adds a small number of parameters so that it generally has the same convergence rate as the base model. The asynchronous prompt optimization scheme with improves the convergence more remarkably on the Amazon dataset. In addition, we indeed provide a complexity analysis. See section D.7.
Analysis V: Effect of prompt related components of our method. Firstly we completely remove the CtRetroPromptPool design (w/o CtRroPP in Figure 7(b)) and use a single temporal prompt to train tasks sequentially. The performance declines with a notable drop, indicating that a single prompt suffers severe catastrophic forgetting between tasks, while our design of CtRetroPromptPool encodes task-invariant and task-specific knowledge well. Secondly, we remove the learnable key associated with prompts (w/o k-v in Figure 7(b)) and directly use the mean of prompts as keys. This strategy causes a moderate drop in performance. To conclude, learnable keys decouple the query and prompt learning processes and markedly contribute to the performance.
Analysis VI: Effect of hyperparameters of our method. We evaluate how the performance of PromptTPP changes as we vary three key hyperparameters: (i) prompt length , (ii) selection size , and (iii) prompt pool size . Theoretically, determines the capacity of a single prompt (which jointly encodes certain knowledge), is the total size used to prepend the event vector, while sets the up limit of the capacity of learnable prompts.
-
•
Prompt length and selection size . From the results in Figure 6(a), a too small negatively affects results as a single prompt has a too limited ability to encode the knowledge. Besides, given an optimal , an overly large makes the total prompts excessively oversized, leading to underfitting and negatively impacting the results. We conclude that a reasonably large and enable the model properly encode the shared knowledge between the tasks of event sequences and substantially improve the predictive performance.
-
•
Prompt pool size . Figure 6(b) illustrates that positively contributes to the performance. This is because the larger pool size means the larger capacity of the prompts.
5 Conclusion
In summary, this paper has proposed a groundbreaking framework, known as PromptTPP, for modeling streaming event sequences. By incorporating a continuous-time retrieval prompt pool, the framework effectively facilitates the learning of event streams without requiring rehearsal or task identification. Our experiments have shown that PromptTPP performs exceptionally well compared to other competitors, even under challenging and realistic conditions.
6 Limitations and Societal Impacts
Limitations. Our method uses neural networks, which are typically data-hungry. Although it worked well in our experiments, it might still suffer compared to non-neural models if starved of data.
Societal Impacts. By describing the model and releasing code, we hope to facilitate probabilistic modeling of continuous-time sequential data in many domains. However, our model may be applied to unethical ends. For example, it may be used for unwanted tracking of individual behavior.
References
- Alibaba (2018) Alibaba. User behavior data from taobao for recommendation, 2018.
- Bacry et al. (2017) Bacry, E., Bompaire, M., Gaïffas, S., and Poulsen, S. tick: a Python library for statistical learning, with a particular emphasis on time-dependent modeling. ArXiv e-prints, 2017.
- Borgeaud et al. (2022) Borgeaud, S., Mensch, A., Hoffmann, J., Cai, T., Rutherford, E., Millican, K., van den Driessche, G., Lespiau, J.-B., Damoc, B., Clark, A., de Las Casas, D., Guy, A., Menick, J., Ring, R., Hennigan, T., Huang, S., Maggiore, L., Jones, C., Cassirer, A., Brock, A., Paganini, M., Irving, G., Vinyals, O., Osindero, S., Simonyan, K., Rae, J. W., Elsen, E., and Sifre, L. Improving language models by retrieving from trillions of tokens, 2022.
- Boyd et al. (2020) Boyd, A., Bamler, R., Mandt, S., and Smyth, P. User-dependent neural sequence models for continuous-time event data. 2020.
- Buzzega et al. (2020) Buzzega, P., Boschini, M., Porrello, A., Abati, D., and Calderara, S. Dark experience for general continual learning: a strong, simple baseline. In NeurIPS, 2020.
- Cha et al. (2021) Cha, H., Lee, J., and Shin, J. Co2l: Contrastive continual learning. In ICCV, 2021.
- Cho et al. (2022) Cho, H., Kim, H. J., Kim, J., Lee, S.-W., Lee, S.-g., Yoo, K. M., and Kim, T. Prompt-augmented linear probing: Scaling beyond the limit of few-shot in-context learners. arXiv preprint arXiv:2212.10873, 2022.
- Chu & Li (2023) Chu, Z. and Li, S. Continual treatment effect estimation: Challenges and opportunities. AAAI Bridge Program on Continual Causality, pp. 11–17, 2023.
- Chu et al. (2023a) Chu, Z., Hao, H., Ouyang, X., Wang, S., Wang, Y., Shen, Y., Gu, J., Cui, Q., Li, L., Xue, S., et al. Leveraging large language models for pre-trained recommender systems. arXiv preprint arXiv:2308.10837, 2023a.
- Chu et al. (2023b) Chu, Z., Li, R., Rathbun, S., and Li, S. Continual causal inference with incremental observational data. arXiv preprint arXiv:2303.01775, 2023b.
- Du et al. (2016) Du, N., Dai, H., Trivedi, R., Upadhyay, U., Gomez-Rodriguez, M., and Song, L. Recurrent marked temporal point processes: Embedding event history to vector. 2016.
- Dubey et al. (2022) Dubey, M., Srijith, P. K., and Desarkar, M. S. Hyperhawkes: Hypernetwork based neural temporal point process. CoRR, abs/2210.00213, 2022.
- Hadsell et al. (2020) Hadsell, R., Rao, D., Rusu, A. A., and Pascanu, R. Embracing change: Continual learning in deep neural networks. Trends in cognitive sciences, 24(12):1028—1040, December 2020. ISSN 1364-6613.
- Hall & Willett (2016) Hall, E. C. and Willett, R. M. Tracking dynamic point processes on networks. IEEE Transactions on Information Theory, 62(7):4327–4346, 2016.
- Hao et al. (2023) Hao, H., Chu, Z., Zhu, S., Jiang, G., Wang, Y., Jiang, C., Zhang, J., Jiang, W., Xue, S., and Zhou, J. Continual learning in predictive autoscaling. In CIKM, 2023.
- Hawkes (1971) Hawkes, A. G. Spectra of some self-exciting and mutually exciting point processes. Biometrika, 1971.
- Hoi et al. (2021) Hoi, S. C., Sahoo, D., Lu, J., and Zhao, P. Online learning: A comprehensive survey. Neurocomput., 459(C):249–289, oct 2021. ISSN 0925-2312.
- Ke et al. (2020) Ke, Z., Liu, B., and Huang, X. Continual learning of a mixed sequence of similar and dissimilar tasks. In Proceedings of the 34th International Conference on Neural Information Processing Systems, NIPS’20, Red Hook, NY, USA, 2020. Curran Associates Inc. ISBN 9781713829546.
- Kingma & Ba (2015) Kingma, D. and Ba, J. Adam: A method for stochastic optimization. 2015.
- Kirkpatrick et al. (2017) Kirkpatrick, J., Pascanu, R., Rabinowitz, N., Veness, J., Desjardins, G., Rusu, A. A., Milan, K., Quan, J., Ramalho, T., Grabska-Barwinska, A., et al. Overcoming catastrophic forgetting in neural networks. PNAS, 114(13):3521–3526, 2017.
- Leskovec & Krevl (2014) Leskovec, J. and Krevl, A. SNAP Datasets: Stanford large network dataset collection, 2014.
- Lester et al. (2021) Lester, B., Al-Rfou, R., and Constant, N. The power of scale for parameter-efficient prompt tuning. arXiv preprint arXiv:2104.08691, 2021.
- Lewis (1965) Lewis, P. A. W. Some results on tests for poisson processes. Biometrika, 52(1/2), 1965.
- Li et al. (2023) Li, B., Dou, L., Hou, Y., Feng, Y., Mu, H., and Che, W. Mixpro: Simple yet effective data augmentation for prompt-based learning. arXiv preprint arXiv:2304.09402, 2023.
- Li & Liang (2021) Li, X. L. and Liang, P. Prefix-tuning: Optimizing continuous prompts for generation. arXiv preprint arXiv:2101.00190, 2021.
- Liu et al. (2022a) Liu, P., Yuan, W., Fu, J., Jiang, Z., Hayashi, H., and Neubig, G. Pre-train, prompt, and predict: A systematic survey of prompting methods in natural language processing. ACM Comput. Surv., sep 2022a. ISSN 0360-0300. Just Accepted.
- Liu et al. (2021) Liu, X., Zheng, Y., Du, Z., Ding, M., Qian, Y., Yang, Z., and Tang, J. Gpt understands, too. arXiv preprint arXiv:2103.10385, 2021.
- Liu et al. (2022b) Liu, X., Ji, K., Fu, Y., Tam, W., Du, Z., Yang, Z., and Tang, J. P-tuning: Prompt tuning can be comparable to fine-tuning across scales and tasks. In Proceedings of the 60th Annual Meeting of the Association for Computational Linguistics (Volume 2: Short Papers), pp. 61–68, 2022b.
- Mallya & Lazebnik (2018) Mallya, A. and Lazebnik, S. Packnet: Adding multiple tasks to a single network by iterative pruning. In CVPR, 2018.
- McCloskey & Cohen (1989) McCloskey, M. and Cohen, N. J. Catastrophic interference in connectionist networks: The sequential learning problem. volume 24 of Psychology of Learning and Motivation, pp. 109–165. Academic Press, 1989.
- Mei & Eisner (2017) Mei, H. and Eisner, J. The neural Hawkes process: A neurally self-modulating multivariate point process. In Advances in Neural Information Processing Systems, 2017.
- Mei et al. (2020) Mei, H., Qin, G., Xu, M., and Eisner, J. Neural Datalog through time: Informed temporal modeling via logical specification. 2020.
- Ni (2018) Ni, J. Amazon review data, 2018.
- Omi et al. (2019) Omi, T., Ueda, N., and Aihara, K. Fully neural network based model for general temporal point processes. In Advances in Neural Information Processing Systems, 2019.
- Paszke et al. (2017) Paszke, A., Gross, S., Chintala, S., Chanan, G., Yang, E., DeVito, Z., Lin, Z., Desmaison, A., Antiga, L., and Lerer, A. Automatic differentiation in PyTorch. 2017.
- Pham et al. (2021) Pham, Q., Liu, C., and Hoi, S. Dualnet: Continual learning, fast and slow. Advances in Neural Information Processing Systems, 34, 2021.
- Qu et al. (2023) Qu, C., Tan, X., Xue, S., Shi, X., Zhang, J., and Mei, H. Bellman meets hawkes: Model-based reinforcement learning via temporal point processes. In AAAI 2023. AAAI Press, 2023.
- Rusu et al. (2016) Rusu, A. A., Rabinowitz, N. C., Desjardins, G., Soyer, H., Kirkpatrick, J., Kavukcuoglu, K., Pascanu, R., and Hadsell, R. Progressive neural networks. arXiv preprint arXiv:1606.04671, 2016.
- Shchur et al. (2020) Shchur, O., Biloš, M., and Günnemann, S. Intensity-free learning of temporal point processes. 2020.
- Shchur et al. (2021) Shchur, O., Turkmen, A. C., Januschowski, T., Gasthaus, J., , and Günemann, S. Detecting anomalous event sequences with temporal point processes. Advances in Neural Information Processing Systems (NeurIPS), 2021.
- Shi et al. (2023) Shi, X., Xue, S., Wang, K., Zhou, F., Zhang, J. Y., Zhou, J., Tan, C., and Mei, H. Language models can improve event prediction by few-shot abductive reasoning. In Advances in Neural Information Processing Systems, 2023.
- Shokri & Shmatikov (2015) Shokri, R. and Shmatikov, V. Privacy-preserving deep learning. In Proceedings of the 22nd ACM SIGSAC Conference on Computer and Communications Security, CCS ’15, pp. 1310–1321, New York, NY, USA, 2015. Association for Computing Machinery. ISBN 9781450338325.
- Snoek et al. (2019) Snoek, J., Ovadia, Y., Fertig, E., Lakshminarayanan, B., Nowozin, S., Sculley, D., Dillon, J. V., Ren, J., and Nado, Z. Can you trust your model’s uncertainty? evaluating predictive uncertainty under dataset shift. In Advances in Neural Information Processing Systems 32: Annual Conference on Neural Information Processing Systems 2019, NeurIPS 2019, December 8-14, 2019, Vancouver, BC, Canada, pp. 13969–13980, 2019.
- Tam et al. (2022) Tam, W. L., Liu, X., Ji, K., Xue, L., Zhang, X., Dong, Y., Liu, J., Hu, M., and Tang, J. Parameter-efficient prompt tuning makes generalized and calibrated neural text retrievers. arXiv preprint arXiv:2207.07087, 2022.
- Varshney et al. (2022) Varshney, V., Patidar, M., Kumar, R., Vig, L., and Shroff, G. Prompt augmented generative replay via supervised contrastive learning for lifelong intent detection. In Findings of the Association for Computational Linguistics: NAACL 2022, pp. 1113–1127, 2022.
- Vaswani et al. (2017) Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones, L., Gomez, A. N., Kaiser, L., and Polosukhin, I. Attention is all you need. 2017.
- Wang et al. (2020) Wang, J., Song, G., Wu, Y., and Wang, L. Streaming graph neural networks via continual learning. In Proceedings of the 29th ACM International Conference on Information & Knowledge Management, CIKM ’20, pp. 1515–1524, New York, NY, USA, 2020. Association for Computing Machinery. ISBN 9781450368599.
- Wang et al. (2023) Wang, Y., Chu, Z., Ouyang, X., Wang, S., Hao, H., Shen, Y., Gu, J., Xue, S., Zhang, J. Y., Cui, Q., et al. Enhancing recommender systems with large language model reasoning graphs. arXiv preprint arXiv:2308.10835, 2023.
- Wang et al. (2022a) Wang, Z., Zhang, Z., Ebrahimi, S., Sun, R., Zhang, H., Lee, C.-Y., Ren, X., Su, G., Perot, V., Dy, J., et al. Dualprompt: Complementary prompting for rehearsal-free continual learning. European Conference on Computer Vision, 2022a.
- Wang et al. (2022b) Wang, Z., Zhang, Z., Lee, C.-Y., Zhang, H., Sun, R., Ren, X., Su, G., Perot, V., Dy, J., and Pfister, T. Learning to prompt for continual learning. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 139–149, 2022b.
- Xiao et al. (2017) Xiao, S., Yan, J., Yang, X., Zha, H., and Chu, S. Modeling the intensity function of point process via recurrent neural networks. In AAAI, 2017.
- Xue et al. (2021) Xue, S., Shi, X., Hao, H., Ma, L., Zhang, J., Wang, S., and Wang, S. A graph regularized point process model for event propagation sequence. In 2021 International Joint Conference on Neural Networks (IJCNN), pp. 1–7, 2021.
- Xue et al. (2022) Xue, S., Shi, X., Zhang, Y. J., and Mei, H. Hypro: A hybridly normalized probabilistic model for long-horizon prediction of event sequences. In Advances in Neural Information Processing Systems, 2022.
- Xue et al. (2023) Xue, S., Shi, X., Chu, Z., Wang, Y., Zhou, F., Hao, H., Jiang, C., Pan, C., Xu, Y., Zhang, J. Y., Wen, Q., Zhou, J., and Mei, H. Easytpp: Towards open benchmarking the temporal point processes. 2023.
- Yang et al. (2022) Yang, C., Mei, H., and Eisner, J. Transformer embeddings of irregularly spaced events and their participants. 2022.
- Yang et al. (2017) Yang, Y., Etesami, J., He, N., and Kiyavash, N. Online learning for multivariate hawkes processes. In Advances in Neural Information Processing Systems, volume 30. Curran Associates, Inc., 2017.
- Zenke et al. (2017) Zenke, F., Poole, B., and Ganguli, S. Continual learning through synaptic intelligence. In ICML, 2017.
- Zhang et al. (2020) Zhang, Q., Lipani, A., Kirnap, O., and Yilmaz, E. Self-attentive Hawkes process. 2020.
- Zuo et al. (2020) Zuo, S., Jiang, H., Li, Z., Zhao, T., and Zha, H. Transformer Hawkes process. In International Conference on Machine Learning, pp. 11692–11702. PMLR, 2020.
Appendix A Discussion on Classical Schemes for Modeling Event Sequence
As shown in Figure 1, a common approach is to use sliding windows to frame the data for model training and prediction. In this setup, we discuss three classical schemes.
-
•
Pretrained TPP. A straightforward solution is to pretrain a TPP in the first train set and use it for all the following test periods. Such an approach faces the problem of distribution shift, i.e., the new data is systematically different from the data the model was trained on Snoek et al. (2019). Take the Taobao dataset (Alibaba, 2018) for example, which contains time-stamped user click behaviors 555Please see section D.1 for the details of the Taobao dataset and section D.2 for the explanations on S statistics and the procedure of the experiment on distribution shift.. We split the dataset by timestamps into periods sequentially and compute the S statistics (Shchur et al., 2021) as a measure of the distribution of event sequences for each period. Figure 8(a) shows that the S statistics differentiate between periods while Figure 8(b) illustrates an increasing KL divergence of the S statistics between the first and later period, implying a pattern shift over time. As a result, this approach may fail to adapt to new data and produce unsatisfactory predictions.
-
•
Retrained TPP. Another classical solution is to train a new TPP on the data of sliding windows over again. The TPP can quickly adapt to new data but may suffer from catastrophic forgetting (McCloskey & Cohen, 1989): adaptation usually implies that the model loses memory of previously encountered data that may be relevant to future predictions. For example, Figure 8(a) shows a large overlap in distributions of different periods on the Taobao dataset, indicating the necessity of maintaining the knowledge of existing patterns to improve generalization (Snoek et al., 2019; Wang et al., 2020).
-
•
Online TPP. A better solution is an online approach: discretize the time axis into small intervals and then incrementally update the TPP at the end of each interval using an online algorithm. However, online models are generally more difficult to maintain and may also cause catastrophic forgetting (Hoi et al., 2021). Besides, to the best of our knowledge, apart from online classical TPPs (Yang et al., 2017; Hall & Willett, 2016), the field of online neural TPPs is much less well-studied.
Appendix B Related Work Details
Here we draw connections and discuss differences between our method to related works.
Temporal Point Process.
A large variety of Neural TPPs have been proposed over recent decades, aimed at modeling event sequences with varying sorts of properties. Many of them are built on recurrent neural networks (Du et al., 2016; Mei & Eisner, 2017; Xiao et al., 2017; Omi et al., 2019; Shchur et al., 2020; Mei et al., 2020; Boyd et al., 2020). Models of this kind enjoy continuous state spaces and flexible transition functions, thus achieving superior performance on many real-world datasets, compared to classical models such as the Hawkes process (Hawkes, 1971). To properly capture the long-range dependency in the sequence, the attention mechanism (Vaswani et al., 2017) has been adapted to TPPs (Zuo et al., 2020; Zhang et al., 2020; Xue et al., 2021; Qu et al., 2023; Wang et al., 2023; Shi et al., 2023) to enhance the predictive performance. However, learning the event sequence under the stream setting is largely unexplored. To the best of our knowledge, there exist two prior works (Yang et al., 2017; Hall & Willett, 2016) that propose online learning algorithms for classical TPPs while that for neural TPP have rarely been studied. We show our method works better than classical online TPPs in practice (see section 4.2).


Continual Learning.
There is also a rich existing literature on CL: the models can be categorized into regularization-based methods (Kirkpatrick et al., 2017; Zenke et al., 2017), which regularize important parameters for learned tasks, architecture-based methods (Rusu et al., 2016; Mallya & Lazebnik, 2018) which assign isolated parameters for each task and rehearsal-based methods (Cha et al., 2021; Buzzega et al., 2020) which save data from learned tasks in a rehearsal buffer to train with the current task. In retrospect, we realize a concurrent work (Dubey et al., 2022) which also augments TPP with CL abilities. Important distinctions of their work from ours include: 1. setup: they use standard TPP train/valid setting while we formalize more realistic streaming setting to train/validate the models; 2. methodology: they model the event streams with a hypernetwork-based regularizer while we use a trainable prompt pool with more flexibility and generality in CL. 3. task agnostic: they rely on a task descriptor built from meta attributes of events while we do not - our method is task agnostic. As their source code is not available yet, we independently implement it and our method still outperforms it (see section 4.2).
Prompt Learning.
Prompt-based learning (or prompting), as an emerging transfer learning technique in NLP, applies a fixed function to condition the model so that the language model gets additional instructions to perform the downstream task. Continuous prompts have also been proposed (Lester et al., 2021; Li & Liang, 2021) to reduce prompt engineering, which directly appends a series of learnable embeddings as prompts into the input sequence, achieving outstanding performance on transfer learning. Wang et al. (2022a, b) connect prompting and CL, which attaches prompts to the pretrained backbone to learn task-invariant and task-specific instructions. Note that it is non-trivial to apply prompting to neural TPPs (See Analysis II and III in section 4.2), and our proposed novel framework reveals its values to event sequence modeling.
Appendix C Method Details
C.1 PromptTPP at Training and Test Time
The training and test time Algorithms for PromptTPP are illustrated in Algorithm 1 and Algorithm 2, respectively.
For simplicity of notations, in test time, we show how to sample the next event given one historical event sequence via the thinning algorithm (Mei & Eisner, 2017), which can be easily extended to batch-wise inference (see the implementation in EasyTPP (Xue et al., 2023)).
Appendix D Experimental Details
D.1 Dataset Details
We evaluate our methods on three industrial user behavior datasets. We provide details on the preparation and utilization of each below. For both datasets, users are associated with anonymous aliases to remove personally identifiable information (PII).
Taobao (Alibaba, 2018). This dataset contains time-stamped user click behaviors on Taobao shopping pages from November 25 to December 03, 2017. Each user has a sequence of item click events where each event contains the timestamp and the category of the item. Following the previous work (Xue et al., 2022), the categories of all items are first ranked by frequencies, and the top are kept while the rest are merged into one category, with each category corresponding to an event type. We work on a subset of most active users with an average sequence length of and then end up with event types.
Amazon (Ni, 2018). This dataset includes time-stamped user product review behavior from January 2008 to October 2018. Each user has a sequence of produce review events where each event containing the timestamp and category of the reviewed product, with each category corresponding to an event type. We work on a subset of most active users with an average sequence length of event tokens and then end up with event types.
StackOverflow (Leskovec & Krevl, 2014). This dataset has two years of user awards on a question-answering website: each user received a sequence of badges and there are different kinds of badges in total. We work on a subset of xx most active users with an average sequence length of xx event tokens.
For the Taobao dataset, each task includes approximately day of time;for the Amazon dataset, each task includes approximately years of time; for the StackOverflow dataset, each task includes approximately months of time. Table 1 shows statistics about each dataset mentioned above.
| Dataset | K | # Evt Tokens | Avg # Evt Tokens | Avg # Evt Tokens | Avg # Seq |
|---|---|---|---|---|---|
| Total | per Seq | per Task | Per task | ||
| Taobao | 20 | 720,000 | 150 | 80,000 | 32 |
| Amazon | 16 | 360,000 | 70 | 42,000 | 10 |
| StackOverflow | 22 | 240,000 | 60 | 43,000 | 12 |
D.2 3S statistics and Experiment on Distribution Shift
We use the 3S (sum-of-squared-spacings) statistics proposed by Shchur et al. (2021) to depict the distribution of an event sequence in continuous time. Compared to the classical KS statistics (Lewis, 1965), it uniformly captures multiple properties of event sequence, such as total event count and distribution of inter-event times. Empirically, replacing the KS score with the 3S statistic consistently leads to a better separation between distributions generated by different TPPs. Please refer to the original paper (Shchur et al., 2021) for a detailed discussion.
For exploring the distribution shift in the Taobao dataset, we randomly sampled a thousand sequences of events and split them into subsets by timestamps: each subset has approximately equal time horizon and is notated sequentially from -th to the -th subset. Then we follow the procedure in (Shchur et al., 2021) to compute the S statistics for each subset and illustrate the results in Figure 8(a).
D.3 Evaluation Setup
To set up the training and evaluation process, we partition Taobao and Amazon datasets into consecutively rolling slides (namely tasks) and partition the StackOverflow dataset into rolling slides (namely tasks). For the Taobao dataset, each slide covers approximately day of time; for the Amazon dataset, each slide covers years of time; for the StackOverflow dataset, each slide covers approximately 5 months time. The subset in each task is split into training, validation, and test sets with a , , ratio by chronological order. Each task has no overlap in the test set. In such a setting, the total test set covers approximately of data.
We train and evaluate each task sequentially. Our evaluation setup is close to that used in real applications: train the model using a fixed length of historical data and evaluate the model using the following window of the data.

D.4 Implementation Details
All models are implemented using the PyTorch framework (Paszke et al., 2017).
For the implementation of NHP, AttNHP, and thinning algorithm, we used the code from the public GitHub repository at https://github.com/yangalan123/anhp-andtt (Yang et al., 2022) with MIT License.
For O-TPP, as the authors Yang et al. (2017) have not published the code, we implement it using the tick (Bacry et al., 2017) library.
For CL-NHP and CL-ANHP, without the public code, by following the main idea of the authors Dubey et al. (2022), we develop the hypernetwork with an MLP layer and add apply regularizer to the hypernetwork parameters while learning a new event sequence, which prevents adaptation of the hypernetworks parameters completely to the new event sequence. Note that, the base models used are NHP and ANHP, respectively, instead of FullyRNN (Omi et al., 2019) applied in the original paper.
We implemented our methods with PyTorch (Paszke et al., 2017) and published the code at at https://github.com/yanyanSann/PromptTPP.
| Model | Parameters | ||
|---|---|---|---|
| Taobao | Amazon | SO | |
| Pre-NHP | 23.3K | 23.4K | 23.3K |
| Pre-ANHP | 25.4K | 25.6K | 25.4K |
| Re-NHP | 23.3K | 23.4K | 23.3K |
| Re-ANHP | 25.4K | 25.6K | 25.4K |
| O-TPP | <1K | <1K | <1K |
| CL-NHP | 27.6K | 27.7K | 27.6K |
| CL-ANHP | 29.5K | 29.6K | 29.5K |
| Pt-NHP | 26.2K | 26.3K | 26.2K |
| Pt-ANHP | 27.8K | 27.0K | 27.8K |
| Model | Description | Value Used | ||
|---|---|---|---|---|
| Taobao | Amazon | SO | ||
| Pre-NHP | RNN Hidden Size | 76 | 76 | 76 |
| Temporal Embedding | 64 | 32 | 64 | |
| Pre-ANHP | Hidden Size | 64 | 64 | 64 |
| Layer Number | 3 | 3 | 3 | |
| Re-NHP | RNN Hidden Size | 76 | 76 | 76 |
| Temporal Embedding | 64 | 32 | 64 | |
| Re-ANHP | Hidden Size | 64 | 64 | 64 |
| Layer Number | 3 | 3 | 3 | |
| O-TPP | Kernel Size | 20 20 | 16 16 | 22 22 |
| CL-NHP | RNN Hidden Size | 64 | 64 | 64 |
| Temporal Embedding | 64 | 32 | 64 | |
| CL-ANHP | Hidden Size | 64 | 64 | 64 |
| Layer Number | 3 | 3 | 3 | |
| RNN Hidden Size | 64 | 64 | 64 | |
| (Retrieval Prompt Pool Size) | 10 | 10 | 10 | |
| Pt-NHP | (Top-N Selected) | 4 | 4 | 4 |
| (Prompt Length) | 10 | 10 | 10 | |
| (Asynchronous Refresh Frequency) | 2 | 2 | 2 | |
| Temporal Embedding | 64 | 32 | 64 | |
| Hidden Size | 64 | 64 | 64 | |
| Layer Number | 2 | 2 | 2 | |
| Pt-ANHP | (Retrieval Prompt Pool Size) | 10 | 10 | 10 |
| (Top-N Selected) | 4 | 4 | 4 | |
| (Prompt Length) | 10 | 10 | 10 | |
| (Asynchronous Refresh Frequency) | 2 | 2 | 2 | |
D.5 Training and Testing Details
D.5.1 Training and Hyperparameters Selection
Training base TPP model.
To train the parameters for a given neural TPP, we performed early stopping based on log-likelihood on the held-out dev set.
-
•
For NHP, the main hyperparameters to tune are the hidden dimension of the neural network. In practice, the optimal for a model was usually , and we search for the optimal value among them for different datasets.
-
•
For AttNHP, in spite of , another important hyperparameter to tune is the number of layers of the attention structure. In practice, the optimal was usually . In the experiment, we choose the hyperparameter based on the held-out dev set while keeping AttNHP to have a similar size to that of NHP.
Training PromptTPP.
We find in equation 11 is not sensitive and works well in a large range, so we set consistently for both datasets. For the prompts, we set for both datasets. For the asynchronous training parameter , we choose for Taobao and Amazon datasets by default.
Chosen Optimizer and Hyperparameters.
Testing.
As described in Mei & Eisner (2017), we minimized the Bayes risk via the thinning algorithm to determine decisions for what a predicted next event time and type would be after conditioning on a portion of a sequence . All experimental results are averaged over runs, and the corresponding standard deviation is reported as well. In the experiment, we report the metrics on the test set for each task as well as the average metrics over all the tasks.
Integral Approximations.
During training and testing, there are a number of integrals (e.g., log-likelihood in equation 11) that need to be computed, which are not feasible in closed form. Thus, we must approximate them. All integrals and expectations are approximated via Monte Carlo (MC) estimates with certain amounts of samples used. in equation 1 uses MC samples during training and testing. When evaluating the integrals used for next event predictions in thinning algorithm, we used samples where the sample points were shared across integrals for a single set of predictions in order to save on computation. The exact approximation procedure for the log-likelihood can be found in Mei & Eisner (2017).
Environment.
All the experiments were conducted on a server with G RAM, a logical cores CPU (Intel(R) Xeon(R) Platinum 8163 CPU @ 2.50GHz) and one NVIDIA Tesla P100 GPU for acceleration.
D.6 Analysis II Details: Statistical Significance

We performed the paired permutation test to validate the significance of our proposed temporal prompt. Particularly, for each model variant (Pt-NHP and Pt-ANHP), we split the test data into ten folds and collected the paired test results with temporal prompt and with the standard prompt, respectively, for each fold. Then we performed the test and computed the p-value following the recipe at https://axon.cs.byu.edu/Dan/478/assignments/permutation_test.php.
The results are in Figure 10. It turns out that, on both datasets, the performance differences are strongly significant for the error rate metric (p-value ) and weakly significant for the RMSE metric (p-value ).
D.7 More Result: Computational Complexity of PromptTPP
The computational complexity comes from two parts: the TPP model and prompt pool.
Take ANHP as the base model. Assume the input sequence length is , event embedding size . Recall the prompt length , selection size and prompt pool size , key size .
ANHP is attention-based, so its original complexity is . By considering the attached prompt, the prompt-augmented ANHP’s complexity becomes . Retrieval’s complexity is . So the total complexity is .
D.8 More Result: Generation Ability Comparison
We investigated the generative ability of the models empirically on Amazon dataset. Given a trained model, we fixed the prefix event sequence and performed the 1-event sampling and 3-event sampling (autoregressively) on the test set of task 9 and task 10. We followed (Xue et al., 2022) to compute the average optimal transport distance (OTD) to measure the distance between the generated sequence and the ground truth. Seen from Figure 11, our proposed models Pt-NHP and Pt-AttNHP achieves the best results. This is consistent with the findings in Main Results in the paper.

