One-relator hierarchies
Abstract.
We prove that one-relator groups with negative immersions are hyperbolic and virtually special; this resolves a recent conjecture of Louder and Wilton. As a consequence, one-relator groups with negative immersions are residually finite, linear and have isomorphism problem decidable among one-relator groups. Using the fact that parafree one-relator groups have negative immersions, we answer a question of Baumslag’s from 1986. The main new tool we develop is a refinement of the classic Magnus–Moldavanskii hierarchy for one-relator groups. We introduce the notions of -stable HNN-extensions and -stable hierarchies. We then show that a one-relator group is hyperbolic and has a quasi-convex one-relator hierarchy if and only if it does not contain a Baumslag–Solitar subgroup and has a -stable one-relator hierarchy.
1. Introduction
One-relator groups, despite their simple definition, have been stubbornly resistant to geometric characterisations. A well known conjecture attributed to Gersten states that a one-relator group is hyperbolic if and only if it does not contain Baumslag–Solitar subgroups [Ger92, AG99]. Modifying the hypothesis or conclusion of this conjecture appears to be problematic. For example, conjectures attempting to classify one-relator groups that are automatic [Ger92, MUW11] or act freely on a CAT(0) cube complex [Wis14] have been posed, but both have been disproven [GW19]. Conjectures attempting to classify when (subgroups of) groups of finite type are hyperbolic have also been posed [Bra99, Bes04], but have also been disproven [IMM23]. More variations can be found, for example, in [Gro93, Wis05, GKL21].
Recently, a different type of geometric characterisation for one-relator groups has emerged from work of Helfer and Wise [HW16] and, independently, Louder and Wilton [LW17]. Namely, if is the presentation complex of a one-relator group, then:
-
(1)
has not-too-positive immersions [LW17].
-
(2)
has non-positive immersions if and only if is torsion-free [HW16].
-
(3)
has negative immersions if and only if every two-generator subgroup of is free [LW22].
Moreover, each of these properties is decidable from [KMS60, LW22]. Since one-relator groups with negative immersions cannot contain Baumslag–Solitar subgroups, this led Louder and Wilton to make the following conjecture [LW22, Conjecture 1.9].
Conjecture.
Every one-relator group with negative immersions is hyperbolic.
The original notions of non-positive and negative immersions are due to Wise [Wis03, Wis04]; note that they are not the same as Louder and Wilton’s [LW24]. The aforementioned conjecture can be considered as a special case of an older conjecture of Wise [Wis04, Conjecture 14.2]. Another related property is that of uniform negative immersions, introduced in [LW24]. Results analogous to those proved by Louder and Wilton [LW22, LW24] for one-relator groups with negative immersions have also been shown for fundamental groups of two-complexes with a stronger form of uniform negative immersions by Wise [Wis20]. However, having uniform negative immersions turns out to be equivalent to having negative immersions in the case of one-relator complexes [LW24, Theorem C].
Louder and Wilton’s conjecture has been experimentally verified for all one-relator groups with negative immersions that admit a one-relator presentation with relator of length less than 17 [CH21]. In this article we verify their conjecture and in fact prove more.
One-relator groups with negative immersions are hyperbolic and virtually special.
Despite the maturity of the theory of one-relator groups, the isomorphism problem has remained almost untouched. A subclass of one-relator groups that is often mentioned when demonstrating the difficulty of this problem is that of parafree one-relator groups [CM82, BFR19]. Indeed, Baumslag asked [Bau86, Problem 4] whether the isomorphism problem for parafree one-relator groups is solvable. See also [FRMW21, Question 3]. A large body of work has been carried out on distinguishing parafree one-relator groups; see, for example, [FRS97, HK17, HK20, Che21] and [LL94, BCH04] for computational experiments. For several families of examples of parafree one-relator groups, see also [BC06]. A consequence of Theorem 7.2 is the following.
The isomorphism problem for one-relator groups with negative immersions is decidable within the class of one-relator groups.
By showing that parafree one-relator groups have negative immersions, we may answer Baumslag’s question in the affirmative.
The isomorphism problem for parafree one-relator groups is decidable within the class of one-relator groups.
We conclude this section by mentioning a couple of other corollaries.
One-relator groups with negative immersions are residually finite and linear.
Every finitely generated subgroup of a one-relator group with negative immersions is hyperbolic.
We now present the main new theorems that go into proving Theorem 7.2.
1.1. Magnus–Moldavanskii–Masters hierarchies
First conceived by Magnus in his thesis [Mag30], the Magnus hierarchy is possibly the oldest general tool in the theory of one-relator groups. After the introduction of the theory of HNN-extensions of groups, the hierarchy was later refined to be called the Magnus–Moldavanskii hierarchy [Mol67]: if is a one-relator group, then there is a diagram of monomorphisms of one-relator groups
such that where identifies two Magnus subgroups of , and splits as a free product of cyclic groups. The proofs of many results for one-relator groups then proceed by induction on the length of such a hierarchy. See [MKS66] for a classically flavoured introduction to one-relator groups with many such examples.
In [Mas06], Masters showed that we can dispense with the horizontal homomorphisms. In other words, if is a one-relator group, there is a sequence of monomorphisms of one-relator groups:
such that where identifies two Magnus subgroups of , and splits as a free product of cyclic groups.
1.2. One-relator hierarchies
The versatility of the Magnus–Moldavanskii hierarchy comes from the fact that it may be described very explicitly in terms of one-relator presentations. Masters’ hierarchy is conceptually simpler, but is not so explicit. By working with two-complexes, we may reconcile both of these advantages. Our version of the hierarchy can be stated as follows.
Let be a finite one-relator complex. There exists a finite sequence of immersions of one-relator complexes:
such that where is induced by an identification of Magnus subgraphs, and such that is finite cyclic.
Each such HNN-splitting is called a one-relator splitting and we call such a sequence of immersions a one-relator tower for . The sequence of immersions are tower maps as defined in [How81]: each immersion factors as an inclusion composed with a cyclic cover. The homomorphisms are thus induced by an identification of two subcomplexes by the deck group action. A maximal one-relator hierarchy is a maximal tower lifting of the induced map of the closed two-cell to the one-relator complex. Note that not every such tower lifting will induce a hierarchy of HNN-extensions of one-relator groups and thus the novelty of Theorem 4.13 lies in showing that such a tower always exists. The proof of Theorem 4.12 relies on a technical and combinatorial analysis of cyclic covers of two-complexes. Some of its applications not mentioned in this article are explored in the author’s thesis [Lin22].
1.3. -stable one-relator hierarchies
We now introduce the notion of -stable one-relator hierarchies. Let be a group and an isomorphism between subgroups of . Inductively define
where denotes the conjugacy class of in . Then we denote by the subset corresponding to the conjugacy classes of non-cyclic subgroups. Define the -stable number of to be
where if for all . In general, even may contain infinitely many conjugacy classes of subgroups. However, we show in Lemma 6.4 that if is a one-relator splitting as in Theorem 4.13, then
where denotes the reduced rank of .
Definition 1.1.
A one-relator hierarchy is a -stable hierarchy if for all .
Our next result establishes an equivalence between quasi-convex one-relator hierarchies and -stable one-relator hierarchies of hyperbolic one-relator groups.
Let be a one-relator complex and a one-relator hierarchy. The following are equivalent:
-
(1)
is a quasi-convex hierarchy and is hyperbolic.
-
(2)
is an acylindrical hierarchy.
-
(3)
is a -stable hierarchy and contains no Baumslag–Solitar subgroups.
Moreover, if any of the above is satisfied, then is virtually special and the image of in is quasi-convex for any connected subcomplex .
In [Wis21], Wise shows that Magnus–Moldavanskii hierarchies of one-relator groups with torsion are quasi-convex. We show that all one-relator hierarchies of one-relator complexes satisfying either of the following are -stable:
In the first case, since one-relator groups with torsion are hyperbolic [New68], we recover Wise’s result. In the second case, since fundamental groups of one-relator complexes with negative immersions are two-free, they cannot contain Baumslag–Solitar subgroups and so we prove Louder and Wilton’s conjecture.
By showing that hyperbolic groups with quasi-convex hierarchies are virtually special [Wis21], Wise also proved that one-relator groups with torsion are residually finite, settling an old conjecture of Baumslag [Bau67]. As a consequence of Wise’s work and Theorem 7.1, we may also establish virtual specialness, residual finiteness and linearity for one-relator groups with negative immersions.
Theorem 7.1 is the crux of the article and is easily applicable to concrete examples, as demonstrated by the following example.
Example 1.2.
Consider the following one-relator hierarchy of length one:
where is given by , . Since , we see that is a free group freely generated by and . Thus we have:
Hence, and this hierarchy is -stable. Using a criterion for finding Baumslag–Solitar subgroups we develop in Subection 6.3, in Example 6.15 we show that
does not contain a Baumslag–Solitar subgroup. Thus, by Theorem 7.1, it is hyperbolic and virtually special.
The choice of group in Example 1.2 is motivated by [CH21] in which the authors verify hyperbolicity for one-relator groups with relator of length less than 17, using a combination of results from the literature and software in GAP and kbmag. This particular example does not satisfy any of the criteria the authors used: it is torsion-free, it is not small cancellation, it is not cyclically or conjugacy pinched, it does not satisfy the hypotheses of [IS98, Theorems 3 & 4] nor those of the hyperbolicity criterion in [BM22]. Moreover, it does not have negative immersions and does not split as an HNN-extension of a free group with a free factor edge group so that the results from [Mut21b, Mut21a] also do not apply.
1.4. Outline of the article
In Section 2, we introduce the necessary background and terminology on graphs and one-relator complexes. There we introduce the notion of a strongly inert graph immersion and use it to prove a key result, Theorem 2.11, bounding the sum of reduced ranks of intersections of certain subgroups in a one-relator group. This feeds into the proof of Theorem 7.1. In Section 3, we cover graphs of spaces and Bass–Serre theory. There we prove Proposition 3.2, a useful tool which will allow us to find HNN-splittings from cyclic covers of one-relator complexes as in Theorem 4.13. In Section 4 we introduce the notion of a -domain, prove that -domains of -covers of finite CW-complexes exist and that minimal -domains of -covers of one-relator complexes are one-relator complexes. Combined with a complexity reduction argument, we then use this to establish Theorem 4.13. Section 5 is dedicated to showing that a hyperbolic one-relator group with a quasi-convex hierarchy has all of its Magnus subgroups quasi-convex. The proof relies on a careful analysis of normal forms induced by the hierarchy from Theorem 4.13. At this point of the article, it is possible to establish the equivalence of (1) and (2) from Theorem 7.1. In Section 6, -stable hierarchies are introduced and some of their properties are proven. All hierarchies of one-relator groups with torsion and negative immersions are then shown to have such hierarchies. The section is concluded with Theorem 6.14 which shows the equivalence of (2) and (3) from Theorem 7.1 and provides a criterion for finding Baumslag–Solitar subgroups. Finally, Section 7 is dedicated to combining all the new tools from the article to prove our main results, Theorems 7.1 and 7.2.
Acknowledgements
We would like to thank Saul Schleimer and Henry Wilton for many stimulating conversations that helped improve the exposition of this article. We would also like to thank Lars Louder for his invaluable comments on Lemma 2.3. Finally, we would like to thank the anonymous referee for the many detailed and insightful comments which have enormously improved this article.
2. Graphs and one-relator complexes
A graph is a 1-dimensional CW-complex. We will write for the collection of 0-cells or vertices and for the collection of 1-cells or edges. We will usually assume to be oriented. An orientation will be induced by maps and , the origin and target maps. For simplicity, we will write to denote any connected graph whose vertices all have degree two, except for two vertices of degree one. Then will denote a connected graph all of whose vertices have degree precisely two.
A map between graphs is combinatorial if it sends each vertex to a vertex and each edge homeomorphically to an edge. A combinatorial map is an immersion if it is also locally injective. Combinatorial graph maps , will be called paths and cycles respectively. The length of a combinatorial path is the number of edges in and is denoted by . If is a path, we may often identify the vertices of with the integers so that is the vertex that traverses. We also put and . We similarly define the length of a cycle . A cycle is primitive if does not factor through any non-trivial covering map . We will call it imprimitive otherwise. We will write to denote the maximal degree of a covering map that factors through. Note that if and only if is primitive. We remark that this definition of primitivity should be compared with the definition of primitivity from the theory of combinatorics of words, not with the definition of primitivity in the theory of free groups. In particular, being imprimitive is not the same as being imprimitive in .
The core of a graph is the subgraph consisting of the union of all the images of immersed cycles and will be denoted by . Note that if is a forest, then . In particular is unique.
2.1. Strongly inert graph immersions
If is a group and , we will adopt the usual convention that . If , we will write to denote the conjugacy class of in . More generally, If are subsets, then define the -conjugacy class of to be the following:
A subgroup is called inert if for every subgroup , we have . This definition was first introduced in [DV96], motivated by the study of fixed subgroups of endomorphisms of free groups. More generally, as defined in [Iva18], we say that is strongly inert if for every subgroup , we have:
Examples of strongly inert subgroups of free groups are:
-
(1)
subgroups of rank at most two [Tar92],
-
(2)
subgroups that are the fixed subgroup of an injective endomorphism [DV96, Theorem IV.5.5],
-
(3)
subgroups that are images of immersions of free groups, as defined in [Kap00].
The latter example follows by observing that the fibre product (in the sense of [Sta83]) of two rose graphs can contain at most a single vertex of valence greater than two.
Remark 2.1.
If is strongly inert, then applying the definition to , we get that for all . Thus, is cyclonormal.
Translating this to graphs, we make the following definition.
Definition 2.2.
A graph immersion is strongly inert if for all graph immersions , the following is satisfied:
Let us briefly explain how this is a translation of strong inertia to graphs. If is a (non-empty) connected core graph, we have that . By work of Stallings [Sta83], if and are graph immersions, then the components of are in natural bijection with the non-trivial intersections , as varies over representatives for the double cosets . As such, we have
The following lemma will produce more examples of strongly inert subgroups of free groups.
Lemma 2.3.
Let be an immersion of finite graphs. If is an inert subgroup of for all free groups , then is a strongly inert graph immersion.
Proof.
Suppose for a contradiction that there exists a graph immersion such that:
Let be the connected components. Choose vertices, for each . Let be the graph with vertex set and edge set where the origin and target of each is the basepoint. Similarly, we let be the graph with vertex set and edge set where the origin and target of each is the basepoint. We then define a graph map by for each , if and for each . We have that where is a free group of rank and . Hence, by assumption, is inert in .
Now for each , let be any immersed path such that begins at , ends at , traverses precisely once and does not traverse for any . Let be the graph obtained from by attaching segments with origin and with target for each . Let be the map obtained by extending by defining . Finally, let be the graph immersion obtained from by folding. By construction, for each there is only one edge in that maps to . Thus, each such edge does not get identified with any other edge under the folding map and so the folding map is a homotopy equivalence, restricting to an isomorphism on . Now not only will contain as a subgraph, but it will also contain segments connecting to for all by construction. We have , and so:
However, is connected by construction, contradicting the fact that was inert in . ∎
2.2. One-relator complexes and Magnus subgraphs
For simplicity, we will mostly be restricting our attention to particular kinds of CW-complexes called combinatorial -complexes.
Definition 2.4.
A combinatorial -complex is a -dimensional CW-complex whose attaching maps are all immersions. We will usually write where is a graph and is an immersion of a disjoint union of cycles.
We will also restrict our maps to combinatorial maps.
Definition 2.5.
A combinatorial map of combinatorial -complexes is a map that restricts to a combinatorial map of graphs and induces a combinatorial map such that . We say that is an immersion if is an immersion and restricts to a homeomorphism on each component.
Since we will always be assuming that our maps are combinatorial, we will often simply neglect to use the descriptor.
The main class of -complexes that we will be working with are one-relator complexes. That is, combinatorial -complexes of the form where is an immersion of a single cycle. Denote by the smallest subcomplex that is a one-relator complex. The following result is the classic Freiheitssatz of Magnus [Mag30].
Theorem 2.6.
Let be a one-relator complex. If is a connected subgraph in which is not supported, then is injective.
We will call subgraphs of one-relator complexes that satisfy the hypothesis of Theorem 2.6, Magnus subgraphs. This is in analogy with Magnus subgroups: if is a one-relator group with one-relator presentation , with cyclically reduced, then a Magnus subgroup for this presentation is a subgroup generated by a subset such that .
If is a one-relator complex and is a Magnus subgraph, then is a Magnus subgroup for some one-relator presentation of . We can see this by taking a spanning tree such that is a spanning tree for . Then by contracting , we obtain a presentation complex for a one-relator presentation of in which is a Magnus subgroup.
If is another Magnus subgraphs and is connected, then, as above, we may obtain a one-relator presentation for in which both and are Magnus subgroups. If is not connected, then this is no longer the case. Nevertheless, by adding edges to so that is connected, we see that and are Magnus subgroups for some one-relator presentation of , where is a finitely generated free group.
The interactions between Magnus subgroups of one-relator groups are well understood. The following theorems are the main results in [Col04] and [Col08] respectively.
Theorem 2.7.
Let be a one-relator complex and let be Magnus subgraphs with connected. Then one of the following holds:
-
(1)
,
-
(2)
for some .
If is imprimitive, then .
We say a pair of Magnus subgroups , have exceptional intersection if the latter situation occurs.
Theorem 2.8.
Let be a one-relator complex and let be Magnus subgraphs with connected. Then for any , one of the following holds:
-
(1)
,
-
(2)
for some ,
-
(3)
.
If is imprimitive, then either or .
Remark 2.9.
Recall that the fundamental group of a one-relator complex has torsion if and only if is imprimitive by [KMS60].
We may, in some sense, strengthen Theorems 2.7 and 2.8 to incorporate intersections of subgroups of fundamental groups of Magnus subgraphs. First, we will need the following lemma.
Lemma 2.10.
Let be a one-relator complex and let be Magnus subgraphs with connected. If is a graph immersion such that , then is a strongly inert graph immersion. In particular, is strongly inert in .
Proof.
By Theorem 2.7, is an echelon subgroup of (see [Ros13, Definitions 3.1 & 3.3] for the definition of an echelon subgroup of a free group). If are free groups and , are echelon subgroups, then by definition, is an echelon subgroup. Thus, Lemma 2.3, combined with [Ros13, Theorem 3.6] implies that is a strongly inert graph immersion. ∎
Theorem 2.11.
Let be a one-relator complex and be Magnus subgraphs with connected. If and are finitely generated subgroups, with a strongly inert subgroup of , then the following is satisfied:
Proof.
The first equality follows from Theorem 2.8. Since and , we have that
Next, let be a set of double coset representatives for . For each , choose an element such that . Denote by the set of such elements. Denote by the set of distinct such that . Each element in is in a distinct double coset. Each element in is in a distinct double coset. Then
where the first inequality follows from the fact that is strongly inert in and the second inequality follows from the fact that is strongly inert in by Lemma 2.10. ∎
3. Graphs of spaces
Let be a connected graph. Let and be collections of connected CW-complexes. We call these the vertex spaces and edge spaces respectively. Let and and ; then let be -injective combinatorial maps. This data determines a graph of spaces . The geometric realisation of is defined as follows:
with for each . This space has a CW-complex structure in the obvious way. We will say a cell is horizontal if its attaching map is supported in a vertex space, vertical otherwise.
There is a natural vertical map
where maps to and maps to the open edge in the obvious way. The following fact about the vertical map is well known, see [Ser03].
Lemma 3.1.
The map:
is surjective.
We may also define a horizontal map:
as the quotient map given by the transitive closure of the relation which, for each , and , identifies with and . A path is vertical if is a constant path and horizontal if is a constant path.
In general, not much can be said about the horizontal map. However, with sufficient restrictions on the edge maps, we can show that it is a homotopy equivalence.
Proposition 3.2.
Let be a graph of spaces. Suppose that are given by inclusions of subcomplexes. Then the following hold:
-
(1)
is a homotopy equivalence if and only if is a tree for each -cell .
-
(2)
If is a homotopy equivalence, then has a CW-structure inherited from and is an immersion for all .
Proof.
Let be an open horizontal cell and denote by . If is not a tree for some -cell , then there is a loop in that maps to a non-trivial loop in under the vertical map, but that maps to the trivial loop under . Thus, cannot be a homotopy equivalence. So now let us suppose that is a tree for all -cells .
We show by induction on that for each horizontal -cell , the preimage is homeomorphic to where is a tree containing only vertical edges and hence immersing into via the vertical map. The claim holds for by the previous paragraph so now assume that and the inductive hypothesis holds. If is an open cell of dimension strictly less than and such that the image of the attaching map for intersects , then the immersion factors through the immersion . Indeed, if lies in the image of , then so must . Thus, the edge in corresponding to maps to the edge in corresponding to . Here we are using the fact that is an inclusion of subcomplexes to naturally identify with the corresponding cells in . Since is a tree by assumption, must also be a tree and, in particular, can be seen as a subtree of .
We may now define the cellular structure on . Define an equivalence relation on the horizontal cells of defined by if and . By the previous paragraph, each open cell maps homeomorphically to its image via and each cell in a given equivalence class has the same image. Choosing a representative for each equivalence class , there is an open -cell with attaching map given by composing the attaching map for with the horizontal map . Since each preimage of an open -cell in is contractible, a standard result now implies that is a homotopy equivalence (for instance, see the proof of [Hat02, Proposition 0.17]).
With this cellular structure on , we now show that is an immersion for each . It is clearly an immersion on -skeleta. If it is an immersion on -skeleta, but not on -skeleta, let be a point at which is not an immersion on the -skeleton. Since restricts to homeomorphisms on each open cell in , we must have that lies in some open cell of dimension or less. Since is an immersion on the -skeleton, there are two distinct open -cells that lie in the same equivalence class and such that the image of their attaching maps intersect . By definition of the tree , this would then yield a non-trivial loop in which is a contradiction. Hence is an immersion for all . ∎
If is a graph of spaces, then the universal cover also has a graph of spaces structure where each vertex space is the universal cover of some vertex space of and each edge space is the universal cover of some edge space of . We will denote this by where is the Bass–Serre tree of . There is a natural covering action of on which pushes forward to an action on . Indeed, we have the following -equivariant commuting diagram:
If satisfies the hypothesis of Proposition 3.2, then we also have a -equivariant commuting diagram:
3.1. Hyperbolic graphs of spaces
Acylindrical actions were first defined by Sela in [Sel97].
Definition 3.3.
Let be a group acting on a tree . The action is -acylindrical if every subset of of diameter at least is pointwise stabilised by at most finitely many elements. We will say the action is acylindrical if there exists some constant such that the action is -acylindrical.
By putting constraints on the geometry of the vertex and edge spaces of a graph of spaces , we may deduce acylindricity of the action of on its Bass–Serre tree. The notion of hyperbolicity that we use is that of Gromov’s -hyperbolicity. One direction of the following theorem is due to Bestvina–Feighn [BF92] (for the hyperbolicity statement) and Kapovich [Kap01, Theorem 1.2] (for the quasi-convexity statement), while the other direction follows from the fact that quasi-convex subgroups of hyperbolic groups have finite height, due to Gitik–Mitra–Rips–Sageev [GMRS98].
Theorem 3.4.
Let be a graph of spaces such that is compact, is hyperbolic for all and is a quasi-isometric embedding for all . Then acts acylindrically on the Bass-Serre tree , if and only if is hyperbolic with the path metric and (or ) is a quasi-isometric embedding for all (or for all ).
4. -domains and one-relator hierarchies
Let be a CW-complex. A -cover is a connected covering map with . We now define -domains. These are subcomplexes of -covers of that allow us to construct a homotopy equivalence between and a graph of spaces in certain situations. We will prove that -domains always exist for finite CW-complexes and use this, in combination with the Freiheitssatz, to establish our hierarchy result for one-relator groups.
Definition 4.1.
Let be a -cover of CW-complexes and denote by a generator. A -domain for is a subcomplex with the following properties:
-
(1)
.
-
(2)
for all .
-
(3)
is connected and non-empty.
We will denote by the set of all -domains. A minimal -domain is a -domain, minimal under the partial order of inclusion.
Example 4.2.
Let be the orientable surface of genus and a non-separating simple closed curve. We may give a CW structure so that is in the one-skeleton. The curve determines an epimorphism via the intersection form. Let be the induced cyclic cover. Consider the subspace obtained by taking the closure of some component of . Its translates cover and intersect in lifts of and so is a (minimal) -domain for .
Now let be a -cover, a generator and a -domain. Consider the following families of spaces:
where and . There are natural inclusion maps:
and
given by the inclusions and . With this data we define the space:
where for all and . We also have an action of on induced by the action on .
Proposition 4.3.
Let be a -cover with a generator and let be a -domain. If are -injective, then and are graphs of spaces and the induced maps
are homotopy equivalences factoring as horizontal maps composed with homeomorphisms. In particular, splits as a HNN-extension with vertex group and edge group .
Proof.
Condition (3) of -domains combined with -injectivity of implies that and are graphs of spaces. Condition (1) implies that the maps and are surjective and the definition of the horizontal map shows that they factor through the horizontal maps. The preimages of points in under the map are collections of intervals which can be identified with subintervals of , the underlying graph of the graph of spaces for . The horizontal map is the quotient map defined by identifying each connected component of these preimages to points. Condition (2) of -domains implies these preimages are actually connected. Hence, the factored map is actually a homeomorphism. Since acts freely on , distinct points in a single point preimage in lie in distinct -orbits and so it follows from the commutativity of the diagram
that preimages of points in under the map are also connected subintervals of . As before, we obtain that the map factors as the horizontal map composed with a homeomorphism. By Proposition 3.2, both horizontal maps are homotopy equivalences and so the induced maps are also homotopy equivalences. ∎
4.1. Existence of -domains
Let us first fix some notation. Let be a -cover with a generator for . Choose some spanning tree and some orientation on . This induces an identification of with , the free group generated by
For any subset , define:
Choose some lift of to and denote this by . Then, since is regular, every lift of is obtained by translating by an element of . So we will denote by:
For each , denote by the lift of such that . If , then . If , then where
is the obvious map.
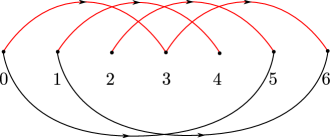
If and , define to be the subset consisting of the elements such that . Then if , we define the following subcomplex of the 1-skeleton of :
Examples of such subcomplexes can be seen in Figures 1 and 2. We also write
Remark 4.4.
The subgroup acts on each component of and the quantity is precisely the number of connected components of . In fact, if we contract all the lifts of in , then the resulting graph is the Cayley graph for over the generating set . So the connected components of correspond to cosets in .
We will call a subset connected if for all triples of integers , if then .
Proposition 4.5.
Let be a -cover. For any subset and any connected subset , the following hold:
-
(1)
If , then consists of connected components.
-
(2)
If , then there exists some constant such that consists of connected components whenever .
Proof.
For (1), note that we have that , hence each edge with has both endpoints in . So for each , the subcomplexes are all pairwise disjoint and cover .
Now assume that . Let be any finite subset such that . For any pair of connected subsets of size larger than the largest element of in absolute value, the inclusion is surjective on components. Hence, for large enough , the number of components must stabilise at by Remark 4.4. By definition of , we also have that has connected components for all connected such that . This establishes (2). ∎
Proposition 4.6.
Every -cover of a finite CW-complex has a finite -domain.
Proof.
Let be a finite CW-complex and a -cover. We prove this by induction on -skeleta of . Denote by the restriction of to the -skeleton of . Since is finite, is finite. As , we may apply Proposition 4.5 and obtain an integer such that is connected for all . So if we choose so that is greater than and greater than the maximal size of an element in in absolute value, then satisfies conditions (1) and (2) of the definition of -domains. By possibly enlarging by one element, we may ensure that (3) is also satisfied and hence that is a -domain for .
Now suppose we have a -domain for . Then for any connected subset , the subcomplex is also a -domain for . The first and last properties are clear, whereas the second property holds because
if , where and , and
otherwise, where the last inclusion uses the fact that was a -domain for . We may choose large enough so that contains a lift of each attaching map of -cells in . Then the full subcomplex of containing is a -domain for . ∎
4.2. Graphs and one-relator complexes
If we restrict our attention to graphs, the topology of minimal -domains is much simpler.
Lemma 4.7.
Let be a finite graph and let be a -cover. If is a minimal -domain, then
Proof.
Up to contracting a spanning tree, we may assume that has a single vertex and edges. Let be a minimal -domain. We have since is obtained from by removing the lowest vertex and each of the lowest edges. We claim that is a tree. If not, then there would be an embedded cycle . By possibly replacing this cycle with a translate, we may assume that it traverses an edge such that does not lie in . Then removing this edge will leave us with a smaller -domain, contradicting minimality. Thus, we must have that is actually a tree, otherwise we could remove some edge. Thus and . ∎
As a consequence of Lemma 4.7 and Proposition 4.3, we can see that minimal -domains of -covers of graphs correspond to certain free product decompositions of .
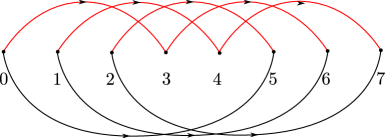
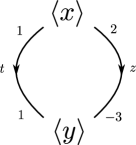
Example 4.8.
Let be a graph with a single vertex and two edges, so . The spanning tree is the unique vertex . Let be the two edges and let be the homomorphism that sends to and to . Then let be the corresponding -cover. Let , then can be seen in Figure 1. The numbers in the diagram correspond to , the lower black edges are lifts of and the upper red edges are lifts of edges. This is not quite a -domain as its intersection with a translate is disconnected. However, we can see that is a genuine -domain, see Figure 2. In fact, it is the unique minimal -domain for . The unique primitive cycle that factors through , represents the unique conjugacy class of primitive element in .
Another special case is that of one-relator complexes. The following two propositions are the foundations for our one-relator hierarchies.
Proposition 4.9.
Let be a finite one-relator complex, let be a -cover and let be a minimal -domain. Then is a finite one-relator complex, such that either is a tree, or is connected.
Proof.
Let be a finite one-relator complex and a -cover. Let be a minimal -domain for . There is a minimal -domain for the -cover contained in . By Lemma 4.7, is a tree. Just as in the proof of Proposition 4.6, we have that is also a -domain for all connected subsets . Now let be of smallest size such that a lift of is supported in . Since is a tree, at most one lift can be supported in this subgraph. Now the union of this subgraph with the two-cell attached along is a -domain which must contain a translate of by minimality. Thus, is a one-relator complex. By construction, either and so and so is a tree, or and so is a -domain for and so is connected. ∎
4.3. One-relator hierarchies
Define the complexity of a one-relator complex to be the following quantity:
We endow the complexity of one-relator complexes with the dictionary order so that if or and . Note that the first component of is a slight modification of the notion of complexity used by Howie in [How81].
Proposition 4.11.
Let be a finite one-relator complex and a cyclic cover. If is a minimal -domain, then:
Proof.
It is clear that if and , we cannot have . Suppose that we have , then we must have that actually lifts to all -domains. But then this implies that is a subcomplex of . So applying Lemma 4.7 to the induced -cover of the graph , we see that when is minimal. Thus, and when is minimal. ∎
By Proposition 4.9, if is a one-relator complex and is a cyclic cover, there exists a one-relator complex . Repeating this, we obtain a sequence of immersions of one-relator complexes where is a one-relator -domain of a -cover of for each . We will call this a one-relator tower. Note that each immersion is a tower map in the sense of [How81]. If does not admit any -covers, we will call this a maximal one-relator tower.
Proposition 4.12.
Every finite one-relator complex has a maximal one-relator tower .
Proof.
The proof is by induction on , the base case is . We have precisely when . This is the only case where does not admit any -cover. This is because if , then and so . Hence, the base case holds. The inductive step is simply Proposition 4.11. ∎
Now we are ready to prove our version of the Magnus–Moldavanskii hierarchy for one-relator groups.
Theorem 4.13.
Let be a finite one-relator complex. There exists a finite sequence of immersions of one-relator complexes:
such that where is induced by an identification of Magnus subgraphs, and such that is finite cyclic.
Proof.
We will call a splitting as in Theorem 4.13 a one-relator splitting. Then the associated Magnus subgraphs inducing are and .
Remark 4.14.
We will call a one-relator tower a hierarchy of length if splits as a free product of cyclic groups. Denote by the hierarchy length of , that is, the smallest integer such that a hierarchy for of length exists. By Theorem 4.13 this is well-defined for all one-relator complexes. We extend this definition also to one-relator presentations by saying that the hierarchy length of a one-relator presentation is the hierarchy length of its presentation complex. A hierarchy is of minimal length if .
The hierarchy length of a one-relator complex is not preserved under homotopy equivalence. This is illustrated by the following examples.
Example 4.15.
Let be a pair of coprime integers. Denote by any cyclically reduced element in the unique conjugacy class of primitive elements in where is the abelianisation map. Then the Baumslag–Solitar group has two one-relator presentations:
such that the hierarchy length of the first presentation is 2, but of the second is 1. Since presentation complexes of one-relator groups without torsion are aspherical by Lyndon’s identity theorem[Lyn50], the two associated presentation complexes are homotopy equivalent.
Note that the words and are not equivalent under the action of if . Similarly for and .
We may do the same with the Baumslag–Gersten groups:
The hierarchy length of the first presentation is three, but of the second is two.
5. Normal forms and quasi-convex one-relator hierarchies
5.1. Normal forms
Computable normal forms for one-relator complexes can be derived from the original Magnus hierarchy [Mag30]. Following the same idea, we build normal forms for universal covers of one-relator complexes. The geometry of these normal forms will then allow us to prove our main theorem.
Let be a combinatorial -complex. We define to be the set of all combinatorial immersed paths. If , then we denote by the reverse path. If are paths with , we will write for their concatenation.
Definition 5.1.
A normal form for is a map where and and is the constant path, for all . We say that is prefix-closed if for every and , we have that where .
We will be particularly interested in certain kinds of normal forms, defined below, the first being quasi-geodesic normal forms and the second being normal forms relative to a given subcomplex. The motivation for these definitions is the following: if is a two-complex, a -injective subcomplex such that the universal cover admits quasi-geodesic normal forms relative to a copy of the universal cover , then will be undistorted in .
Definition 5.2.
Let . A normal form is -quasi-geodesic if every path in is a -quasi-geodesic. We will call quasi-geodesic if it is -quasi-geodesic for some .
Definition 5.3.
Suppose is a subcomplex. A normal form is a normal form relative to if, for any contained in the same connected component of and , the following hold:
-
(1)
is supported in ,
-
(2)
is supported in after removing backtracking.
By definition, any normal form for is a normal form relative to .
The general strategy for building our normal forms for universal covers of one-relator complexes will be to use one-relator hierarchies and induction. In order to do so, we must first discuss normal forms for graphs of spaces.
5.2. Graph of spaces normal forms
For simplicity, we only discuss normal forms for graphs of spaces with underlying graph consisting of a single vertex and single edge. However, the construction is the same for any graph.
Let be a graph of spaces where consists of a single vertex and a single edge, and are combinatorial two-complexes and are inclusions of subcomplexes. Denote by and . We may orient the vertical edges so that they go from the subcomplex to the subcomplex . When it is clear from context which path we mean, we will abuse notation and write for all , to denote a path that follows vertical edges consecutively, respecting this orientation. We will write for all , for the path that follows vertical edges in the opposite direction. Since are embeddings, these paths are uniquely defined given an initial vertex.
The universal cover also has a graph of spaces structure with underlying graph the Bass–Serre tree of the associated splitting, the vertex spaces are copies of the universal cover , the edge spaces are copies of the universal cover and the edge maps are -translates of lifts of the maps . We will denote by the underlying graph of spaces so that . Every path can be uniquely factorised:
with and where each is (a possibly empty path) supported in some copy of . We say is reduced if there are no two subpaths that are both supported in the same copy of . Hence that no subpath has both endpoints in the same copy of . In other words, the path is immersed, where is the vertical map to the Bass–Serre tree .
A vertical square in is a two-cell with boundary path where and are edges in two different copies of . We will call the paths , , , and their inverses corners of this square. We may pair up two corners and if their concatenation forms the boundary of a square. In this way, each corner exhibits a vertical homotopy to the opposing corner it is paired up with. For instance, there is a vertical homotopy through the square between and .
Now let
be -equivariant normal forms relative to and respectively. Since these are -equivariant, it is not important which lift of and we choose. Let
be a -equivariant normal form for . From this data, we may define normal forms for as follows. We say a normal form
is a graph of spaces normal form induced by if the following holds for all :
-
(1)
.
-
(2)
If then . Furthermore, if is the first edge traverses, then does not form a corner of a vertical square.
-
(3)
If then . Furthermore, if is the first edge traverses, then does not form a corner of a vertical square.
Our definition of graph of spaces normal form and the following theorem are the topological translations of the algebraic definition and the normal form theorem [LS01, p. 181].
Theorem 5.4.
If and are as above, there is a unique graph of spaces normal form induced by . Moreover, the following are satisfied:
-
(1)
is -equivariant,
-
(2)
the action of on and coincide,
-
(3)
if , and are prefix-closed, then so is .
Before moving on, we shall provide a brief sketch of the proof of Theorem 5.4.
Given existence and uniqueness of graph of spaces normal forms, the fact that they must be prefix closed provided and are can be shown directly from the definition of graph of spaces normal forms. Indeed, any prefix of a path satisfying the three conditions, will also satisfy the three conditions. Similarly for the equivariance claims.
The existence of normal forms can be shown by choosing paths between each pair of points and putting them into normal form as follows. If , then . If and , then replace with , where is the largest prefix contained in the same copy of that was in. Then perform a sequence of vertical homotopies through vertical squares, replacing with , where lies in the same copy of that was in. Then can be defined inductively on by setting , where , after possibly removing backtracking. The case where is handled similarly. The fact that these are graph of spaces normal forms is by construction. This procedure will be important for the proof of Theorem 5.7.
Now suppose that and are two paths in normal form with the same origin and target vertices. Since the underlying graph of the graph of spaces is a tree, the Bass–Serre tree of the graph of groups induced by , it follows that and for all . Moreover, it also follows that must be equal if or path homotopic into a copy of if or if . In the second case, since and , the definition of relative normal forms tells us that lies in after removing backtracking. Hence otherwise the first edge of or would form the corner of a vertical square together with . The first case is handled similarly and so and are equal as paths.
5.3. Quasi-geodesic normal forms for graphs of hyperbolic spaces
The definition of quasi-geodesics may be generalised in the following way. Let be a metric space and be a monotonic increasing function. A path , parametrised by arc length, is an -quasi-geodesic if, for all , the following is satisfied:
If is bounded above by a constant , then is simply a -quasi-geodesic.
Theorem 5.5.
Let be a geodesic hyperbolic metric space and a subexponential function. There is a constant such that all -quasi-geodesics are -quasi-geodesics.
Proof.
Follows from [Gro87, Corollary 7.1.B]. Alternatively, a slight modification of the proof of the Morse lemma, see for example [ABC+91, Proposition 3.3], replacing quasi-geodesics with -quasi-geodesics, yields that there is a constant such that -quasi-geodesics and geodesics lie in the -neighbourhoods of each other. So now let be a geodesic and let be an -quasi-geodesic with the same endpoints. For each positive integer , there is some such that and so . Hence, we have for all . Thus, setting yields that and thus, the result. ∎
It follows from Theorem 5.5 that there is a gap in the spectrum of possible distortion functions of subgroups of hyperbolic groups. This is known by work of Gromov [Gro87] and appears as [Kap01, Proposition 2.1].
Corollary 5.6.
Subexponentially distorted subgroups of hyperbolic groups are undistorted and hence, quasi-convex.
The following result can be thought of as a strengthening of [Kap01, Corollary 1.1]. We make use of Theorem 5.5.
Theorem 5.7.
Let be a graph of spaces with consisting of a single vertex and edge. Let , and be -equivariant normal forms, with relative to and relative to . Suppose that the following are satisfied:
-
(1)
is hyperbolic,
-
(2)
acts acylindrically on the Bass-Serre tree ,
-
(3)
, and are prefix-closed quasi-geodesic normal forms.
Then the graph of spaces normal form induced by :
is prefix-closed and quasi-geodesic.
Under the same hypothesis, Kapovich showed that for each pair of points in , there exists a reduced quasi-geodesic path connecting them. Theorem 5.7 shows that graph of spaces normal forms provide us with such paths. This fact will be key for the proof of our main theorems.
Proof of Theorem 5.7.
The fact that is prefix-closed is Theorem 5.4. By Theorem 3.4, we have that is -hyperbolic and is a quasi-isometric embedding. Thus, there is a constant such that the images of , and are -quasi-geodesic in . Now let be any two points and a geodesic connecting them through the 1-skeleton. We may factorise this geodesic
such that , each is path homotopic into a copy of and there is no subpath with that is path homotopic into some copy of . If , we will write to denote the copy of in that ends in. When it makes sense, we will do the same for and . This is well defined since all the translates of are disjoint or equal and all the translates of are disjoint or equal.
Let , let be a geodesic connecting with and let be a geodesic connecting with . Denoting by the maximal Hausdorff distance of all , and normal forms from their respective geodesics in and by , we claim that
The proof of the claim is by induction on . First suppose that . We will write to mean path homotopic. Since and , we get that is actually a -quasi-geodesic path. This establishes the base case.
Now suppose it is true for all . Suppose , the other case is the same. Let where and the first edge of is not in . Since is supported in a copy of , the path may be homotoped through vertical squares to a path , where is supported in . Let be a geodesic connecting to . Since , the definition of relative normal forms implies that . Let . By uniqueness and the definition of graph of space normal forms, we have
| (1) |
Letting , the inductive hypothesis applied to and yields that
| (2) |
Applying (2) to (1), we obtain
| (3) |
By assumption, is a -quasi-geodesic. Hence there is a point such that . But then since forms a geodesic triangle, there is a point such that . We may now divide into two subcases: either or .
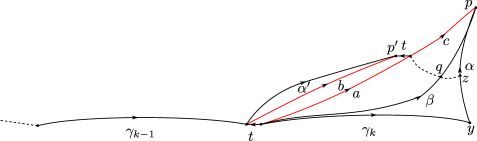
First suppose is a vertex traversed by , see Figure 3. It follows that
and hence, since is a -quasi-geodesic, we have
| (4) |
We also have
| (5) |
In order, applying (4), (5) and the fact that to (3), we obtain
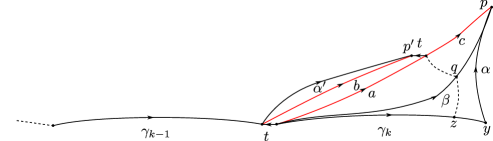
Now we deal with the other case, see Figure 4. If is a vertex traversed by , then
and hence, since is a -quasi-geodesic, we have
| (6) |
We have
| (7) |
In order, applying (6) and (7) to (2) we obtain
and then using the fact that , we obtain
This concludes the proof of the claim.
Consider the polynomial function given by
We have shown that for all , we have . We now want to show that the graph of spaces normal forms are actually -quasi-geodesics.
Let be a normal form and let be a subpath of . Then we have that
satisfies the three conditions of the definition of a graph of space normal form, where here we are using the fact that and are prefix closed to see that is a normal form. Combining this with the uniqueness of graph of space normal forms we have
We showed that:
and so we know that
By Theorem 5.5, it follows that there is some constant such that is a -quasi-geodesic normal form. ∎
Theorem 5.7 can be used to show that certain subgroups of a hyperbolic acylindrical graph of hyperbolic groups are quasi-convex. In the section that follows, we are going to do precisely this to deduce that Magnus subgroups of one-relator groups with a quasi-convex hierarchy are quasi-convex. The main idea we employ is to use quasi-geodesic normal forms in vertex spaces to build quasi-geodesic normal forms relative to given subgroups. Other conditions of a different flavour already exist in the literature, see [BW13] and the references therein. These results cannot be applied directly as the edge groups in the Magnus splittings are not necessarily malnormal and are usually very far from being Noetherian. Nevertheless, an alternative approach could involve understanding the splittings of Magnus subgroups of one-relator groups induced by the Magnus hierarchy and then following the approach of Dahmani from [Dah03] for showing local (relative) quasi-convexity of limit groups. We opt for our more direct approach which may be of independent interest.
5.4. Quasi-convex Magnus subgraphs
Let us first define what a quasi-convex one-relator hierarchy is. This definition is a reformulation of Wise’s [Wis21] notion.
Definition 5.8.
A one-relator tower (respectively, hierarchy) is a quasi-convex tower (respectively, hierarchy) if are quasi-isometrically embedded in for all , where are the associated Magnus subgraphs.
In order to prove that one-relator groups with torsion have quasi-convex (one-relator) hierarchies, Wise showed in [Wis21, Lemma 19.8] that their Magnus subgroups are quasi-convex. When the torsion assumption is dropped, this is certainly no longer true. However, under additional hypotheses, we may recover quasi-convexity of Magnus subgroups. The only results specifically from the theory of one-relator groups we shall need are the Freiheitssatz and our hierarchy results.
Theorem 5.9.
Let be a finite one-relator complex, a cyclic cover and a finite one-relator -domain. Suppose further that the following hold:
-
(1)
is hyperbolic.
-
(2)
For all connected Magnus subgraphs , is quasi-convex in .
-
(3)
is quasi-convex in .
Then for all connected Magnus subgraphs , is quasi-convex in .
Proof.
Let be a connected Magnus subgraph. Denote by . Since quasi-convexity is transitive, we may assume that for some edge . Note that is connected and so is non separating.
For each edge , choose a lift in as in Subsection 4.1 and denote by for each . Denote by the smallest integer such that is traversed by , and by the largest. We have two cases to consider.
Case 1. For all , we have that and is non separating in .
The action of on , combined with the Freiheitssatz, gives us a graph of spaces as in Proposition 4.3. We moreover have a map (the horizontal map):
that is a homotopy equivalence obtained by collapsing the edge space onto the vertex space as in Proposition 3.2. This lifts to a map in the universal covers:
Denote by the Magnus subgraphs that are the images of . That is, and .
Denote by and . These are connected since and are non separating and they are Magnus subgraphs since both and are traversed by . In particular, . Denote by the universal cover of . By the Freiheitssatz, the universal covers of and are trees, including into . Denote by and subgraphs of corresponding to universal covers of and respectively. Since and are quasi-convex subgroups of , there are prefix-closed, quasi-geodesic, -equivariant normal forms , for , relative to and respectively. Recall that our normal forms are immersed paths and so and necessarily restrict to geodesic normal forms on and . Moreover, they necessarily agree on intersections of translates of with translates of . Since and are subtrees of and respectively, these are also normal forms relative to and . Hence, we may apply Theorem 5.4 to obtain unique prefix-closed -equivariant graph of space normal forms for , induced by . By Theorems 3.4 and 5.7, is also quasi-geodesic.
Now let be an immersed path and let be a path such that is path homotopic to via a sequence of collapses of segments in the domain which mapped to vertical edges in under . Since is finite, there is a constant such that preimages of vertices in under are segments of length at most . In particular, . After possibly performing finitely many homotopies through vertical squares (which do not alter the composition with ), we may assume that has the property that for all , if is the first edge that traverses, then does not form the corner of a vertical square. Since , we see that each is both in normal form with respect to and by the remarks in the previous paragraph. Hence, is in normal form with respect to . Since was a quasi-geodesic normal form, it follows that is quasi-convex in .
Case 2. There is some such that either , or , or is separating in .
Let be the one-relator complex obtained from by adding a single edge, . Thus, we have . If is the epimorphism inducing , denote by the epimorphism such that and . Let be the subcomplex obtained from by removing each with or . If is the cyclic cover induced by , then lifts to . Moreover, for appropriately chosen integers , we see that
is a one-relator -domain for . By construction, for all , we have that and that is non separating in . Moreover
where each is a (possible empty) connected subcomplex of . By hypothesis, is quasi-convex in for all connected subgraphs . By the proof of the first case, we see that is quasi-convex in . But then must also be quasi-convex in and we are done.∎
Corollary 5.10.
Let be a one-relator complex. Suppose that is hyperbolic and admits a quasi-convex one-relator hierarchy. Then is quasi-convex in for all Magnus subgraphs .
Proof.
6. -stable HNN-extensions of one-relator groups
Let us repeat the definition of the -stable number from the introduction. If is an isomorphism of two subgroups , inductively define
Then we denote by the subset corresponding to the conjugacy classes of non-cyclic subgroups. Define the -stable number of as
where if for all . We say that is -stable if .
For the purposes of this section, unless otherwise stated, we will always assume that is a finitely generated one-relator group and that are two strongly inert subgroups of Magnus subgroups for some one-relator presentation of . For the main results of this article, the reader should have in mind the case in which and are Magnus subgroups themselves. Let be an isomorphism. Consider the HNN-extension of over :
We will call this an inertial one-relator extension.
Remark 6.1.
Remark 6.2.
If is a one-relator group with the trivial relation, itself is a Magnus subgroup of . Thus, HNN-extensions of free groups with finitely generated strongly inert edge groups are inertial one-relator extensions.
Remark 6.3.
For simplicity, we focus only on HNN-extensions. However, with minor modifications, most of the results in this section hold for graphs of groups satisfying the following:
-
(1)
is a connected graph with ,
-
(2)
for each , has a one-relator presentation so that each adjacent edge group is a strongly inert subgroup of a Magnus subgroup of .
This class of groups includes groups with staggered presentations.
Let denote the Bass–Serre tree associated with the inertial one-relator extension . See [Ser03] for the relevant notions in Bass–Serre theory. We will identify each vertex of with a left coset of . Denote by
Each edge in has an orientation induced by . Denote by the geodesic segments which only consist of edges pointing away from and by those pointing towards . The elements correspond to stabilisers of segments such that .
For inertial one-relator extensions, the ranks of stabilisers of elements in are bounded in a strong sense.
Lemma 6.4.
For all , the following holds:
Proof.
Let , then where is equal to a reduced word of the form:
with and . The segment is the geodesic segment with vertices . By assumption we have that is a strongly inert subgroup of a Magnus subgroup . We have that for all by Remark 2.1 (similarly for ). Combining this with Theorem 2.8, if there is some such that , then is either cyclic or trivial since our word was reduced. Denote by the set of reduced words of the form and by the set of reduced words of the form . Let be a set of representatives for the set of double cosets . Then we have
which yields the equality from the statement. By symmetry, it suffices to only bound one of the sums above to establish the inequality. We may assume that each word in is a prefix of a word in . If , denote by the set of elements such that . We first claim that each element is in a distinct double coset. Let be such that where and . Then we have that , a contradiction. We next claim that
The equality is obvious, we now show the inequality. The proof of the claim proceeds by induction with the base case being clear as . So let us now assume the inductive hypothesis. We have
where the first inequality follows from our previous claim, the second inequality follows from Theorem 2.11 and where the final inequality follows from the inductive hypothesis. The lemma now readily follows. ∎
The following proposition is key in our proof of -stability of one-relator hierarchies of one-relator groups with negative immersions. The main consequence is that if , then there exists some element acting hyperbolically on such that for all .
Proposition 6.5.
If , then there are many -orbits of biinfinite geodesics such that the following holds:
-
(1)
contains the vertex .
-
(2)
Every finite subset of has non-cyclic, non-trivial stabiliser.
Moreover, for every such biinfinite geodesic, the following holds:
-
(1)
Every edge in is directed in the same direction.
-
(2)
There exists an element acting hyperbolically on with translation length at most such that .
Proof.
The fact that every such geodesic must consist of edges directed in the same direction follows from the equality in Lemma 6.4. The fact that there are many such -orbits of geodesics follows by applying the pigeonhole principle and the inequality from Lemma 6.4. So now let be a collection of -orbit representatives of such biinfinite geodesics in . Identify each vertex of with an integer so that is the vertex associated with . Let be an element such that is the vertex in . Then must be in the same -orbit of some . But then by the pigeonhole principle, must contain two biinfinite geodesics in the same -orbit. Suppose that for some and . Then we have
where acts hyperbolically on with translation length at most . ∎
6.1. One-relator groups with torsion
The following lemma allows one to easily establish -stability of a one-relator splitting in certain cases: if the edge groups of a one-relator splitting have no exceptional intersection, then the splitting is -stable.
Lemma 6.6.
Let be a one-relator complex and let be a one-relator splitting where are the associated Magnus subgraphs. Let be Magnus subgraphs such that , and is connected. If , then .
Proof.
Let be the cyclic cover containing and let be a generator of the deck group. Let be a graph immersion with . By assumption and Theorem 2.8, is homotopic in to a graph immersion if and and only if is homotopic in to a graph immersion . If , there is a graph immersion as above such that is homotopic in to a graph immersion . Carrying on this argument, we see that if , then there exists a graph immersion such that and such that is homotopic to a graph immersion . However, clearly for large enough we have that . ∎
The condition from Lemma 6.6 always holds for one-relator splittings of one-relator groups with torsion by Remark 6.1 and Theorem 2.7 (see Remark 2.9), yielding the following.
Corollary 6.7.
All one-relator splittings of one-relator groups with torsion are -stable.
6.2. One-relator groups with negative immersions
The aim of this subsection is to show that every one-relator splitting of a one-relator group with negative immersions is -stable. In order to do this, we show that certain constraints on the subgroups of that are not conjugate into imply -stability.
Theorem 6.8.
If every descending chain of non-cyclic, freely indecomposable proper subgroups of bounded rank
is either finite or eventually conjugate into , then .
Proof.
Suppose for contradiction that . Let be a biinfinite geodesic as in Proposition 6.5. Let be the element acting by translations on . Since every edge in points in the same direction, we have that . Hence, by definition of , is non-trivial and non-cyclic for all .
Denote by . Consider the descending chain of subgroups
where we denote by . Since , the ranks are bounded. The chain must be proper since for all .
Each has a Grushko decomposition
that is unique up to permutation and conjugation of factors and where each is non-cyclic and freely indecomposable. By the Kurosh subgroup theorem, each is a conjugate of a subgroup of some . Furthermore, we have that .
Now the claim is that for some integer and for all , each is either a conjugate of some or is conjugate into . If this was not the case, then there would be infinite sequences of integers and and elements such that
where the inclusions are all proper and no is conjugate into . But this contradicts the hypothesis and so the claim is proven.
So now denote by . For all , we have that for some fixed . But now since , this forces . Thus, the induced homomorphism factors through the projection . But now is a generator of , so there is some primitive element that maps to a generator of and such that for some . Since is primitive in , we have:
for some subgroup such that .
Now let be the Bass–Serre tree associated with the HNN-extension with trivial edge groups. Each vertex is stabilised by a conjugate of and each edge has trivial stabiliser. Since , and is finitely generated, it follows that is a subgroup of a free product of finitely many conjugates of . Since acts hyperbolically on and has trivial edge stabilisers, it follows that
for all sufficiently large. But then this contradicts the assumption that . ∎
Corollary 6.9.
All one-relator splittings of one-relator groups with negative immersions are -stable.
6.3. The graph of cyclic stabilisers and Baumslag–Solitar subgroups
To any inertial one-relator extension , we now describe how to associate a unique graph of cyclic groups . This graph of cyclic groups will be called the graph of cyclic stabilisers of and will encode relations between cyclic stabilisers of segments leading out of . Moreover, certain Baumslag–Solitar subgroups of can be read off from .
Denote by
In other words, (respectively ) is the set of conjugacy classes in (respectively in ) of maximal cyclic subgroups of (respectively in ) which contain a stabiliser for some .
We now define the graph of cyclic stabilisers as follows. Identify with the set . Choose any map sending an element to a generator of a representative and to a generator of a representative . There are two types of edges: -edges and -edges.
For each pair of vertices and each double coset , such that or and
there is an edge connecting and . We further assume that if or , then . Then the boundary maps are induced by the monomorphisms
If , then we say that is an -edge and if , we say that is a -edge. All edges between vertices in and are oriented towards and a choice of orientation is made for the remaining edges.
Remark 6.10.
The isomorphism class of as a graph of groups depends only on . This follows from the construction and justifies being called the graph of cyclic stabilisers of .
Choose any map such that where is the double coset associated with . For all , we may define a group homomorphism
induced by the choices as follows.
Each element of can be represented by words of the form
where , , , and . Then we define
One can check that this is well defined and depends only on . We will call the homomorphism induced by .
A path is alternating if it does not traverse two -edges or -edges in a row. An -path is a path that only traverses -edges. We say a word is an alternating word if is an alternating path. Recall that a word is cyclically reduced if all of its cyclic permutations are also reduced. A word is cyclically alternating if all of its cyclic permutations are also alternating.
Lemma 6.11.
If is a cyclically reduced and cyclically alternating word, then is a cyclically reduced word. In particular, if , then contains a Baumslag–Solitar subgroup, not conjugate into .
Proof.
If the result is clear, so suppose that . We may assume that is a -edge. Taking indices modulo , we have that is not cyclically reduced if and only if for some and
or for some and
In the first case, if and only if . But this would then imply that . Since is free and generates a maximal cyclic subgroup, it follows that , a contradiction. The same argument is valid for the other case. Thus, when , acts hyperbolically on .
Now, by definition of , there are integers , such that
We may assume that and are smallest possible. If or , then or respectively. Since acts hyperbolically on , it follows that this Baumslag–Solitar subgroup is not conjugate into . If , since is cyclically reduced, we have that is also cyclically reduced. Thus, . As before, this copy of cannot be conjugate into . ∎
Example 6.12.
Consider the following one-relator splitting:
This one-relator splitting is also a one-relator hierarchy of length one as is a primitive element of .
Since the edge groups of this splitting are cyclic, it follows that has two vertices, one corresponding to and the other to and a -edge connecting them. Since is a primitive word over , we see that . Hence there is an edge connecting with corresponding to conjugation by , and where the edge monomorphisms are given by multiplication by and respectively. See Figure 5 for the graph of cyclic groups .
We see that has a cyclically alternating and cyclically reduced word and so our one-relator group contains a Baumslag–Solitar subgroup by Lemma 6.11. More explicitly, we have
We will denote by the full subgraph of groups of on the vertices corresponding to maximal cyclic subgroups containing some where for some .
Lemma 6.13.
Let be an inertial one-relator extension with hyperbolic and with both edge groups quasi-convex in . Then the graph of cyclic stabilisers is locally finite. Moreover, if , then is finite.
Proof.
We first show that is locally finite. Each vertex has at most one -edge connected to it, so it suffices to only bound the number of -edges connected to any given vertex. Such a bound follows from [KMW17, Proposition 6.7] (alternatively, one could use a slight modification of [GMRS98]).
Since is locally finite, it follows from the construction that is finite for all . We claim that for all . Denoting by
we have that is either trivial or infinite cyclic for all by Lemma 6.4. Hence, for all , there is some such that . The result follows. ∎
Lemma 6.11 told us that certain Baumslag–Solitar subgroups of could be read off from its graph of cyclic stabilisers. Although we may not find all such subgroups in this way, we now show that under certain conditions, if does contain Baumslag–Solitar subgroups, then Lemma 6.11 will always produce a witness.
Theorem 6.14.
Let be an inertial one-relator extension. Suppose that , that is hyperbolic and that and are quasi-convex in . The following are equivalent:
-
(1)
acts acylindrically on .
-
(2)
does not contain any Baumslag–Solitar subgroups.
-
(3)
admits no cyclically alternating and cyclically reduced word.
Proof.
We prove that (3) implies (1), that (1) implies (2) and that (2) implies (3) by proving the contrapositive statements.
Let be the graph of cyclic stabilisers of and let be a choice of representatives. Suppose that does not act acylindrically on . Then for any , there exists a sequence of geodesic segments with , each with infinite stabiliser. Let be an element such that the endpoints of are and . For all , by Lemma 6.4, is cyclic. By definition, each subgroup is -conjugate into some where . Since is finite by Lemma 6.13, by the pigeonhole principle there are three integers such that , and are -conjugate into some . Thus, there are elements such that:
In particular, if and , then
Suppose that both and act elliptically on . If they do not both fix a common vertex, then acts hyperbolically on . So suppose that they both fix a common vertex . Now the geodesic connecting with must meet at the midpoint between and and the midpoint between and . Since , this is not possible and so we may assume that one of , or acts hyperbolically on . The cyclic reduction of , or provides us with a cyclically alternating and cylically reduced word in . Thus, (3) implies (1).
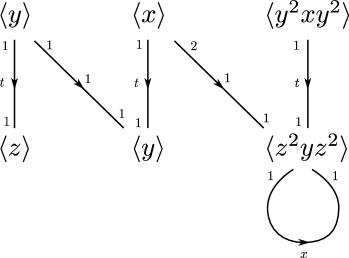
Example 6.15.
Consider Example 1.2 from the introduction:
where is given by , . We showed that is -stable and that the vertex group was freely generated by . We see that the edge groups are generated by and respectively. Every subgroup of the form , or is either trivial, or conjugate to , or one of the following:
By applying to and to , we see that the vertices in corresponding to stabilisers of elements in are the -vertex and the -vertices and . The graph of cyclic stabilisers can be seen in Figure 6. Since does not admit any cyclically alternating and cyclically reduced words, by Theorem 6.14 we see that does not contain any Baumslag–Solitar subgroups.
Remark 6.16.
Algorithmic problems relating to this section are handled in detail in the author’s thesis [Lin22]. Combining work of Howie [How05], Stallings [Sta83] and Kharlampovich–Miasnikov–Weil [KMW17], there it is shown that given as input an inertial one-relator extension with the assumptions of Theorem 6.14, the -stable number and the graph of cyclic stabilisers are computable. Thus, one can effectively decide whether contains a Baumslag–Solitar subgroup or not. The problem of deciding whether an arbitrary one-relator group contains a Baumslag–Solitar subgroup is still open.
7. Main results and further questions
We are finally ready to prove our main results. A one-relator tower (respectively, hierarchy) is an acylindrical tower (respectively, hierarchy) if acts acylindrically on the Bass-Serre tree associated with the one-relator splitting for all . It is a -stable tower (respectively, hierarchy) if for all .
Theorem 7.1.
Let be a one-relator complex and a one-relator hierarchy. The following are equivalent:
-
(1)
is a quasi-convex hierarchy and is hyperbolic.
-
(2)
is an acylindrical hierarchy.
-
(3)
is a -stable hierarchy and contains no Baumslag–Solitar subgroups.
Moreover, if any of the above is satisfied, then is virtually special and the image of in is quasi-convex for any connected subcomplex .
Proof.
The proof is by induction. The base case is clear. By the inductive hypothesis, we may assume that is hyperbolic, virtually special and that is quasi-convex for any connected full subcomplex with . The equivalence between (1) and (2) now follows from Theorem 3.4. The equivalence between (2) and (3) is Theorem 6.14.
We now prove a stronger form of [LW22, Conjecture 1.9].
Theorem 7.2.
Let be a one-relator complex with negative immersions. Then is hyperbolic, virtually special and all of its one-relator hierarchies are quasi-convex hierarchies.
Proof.
Corollary 7.3.
The isomorphism problem for one-relator groups with negative immersions is decidable within the class of one-relator groups.
Proof.
Let be a one-relator group with negative immersions and let be any one-relator group. By [LW22, Theorem 1.3 & Lemma 6.4], there is an algorithm to decide whether has negative immersions or not. If it does not, then it is not isomorphic to . If it does, then both and are hyperbolic by Theorem 7.2 and so isomorphism between the two can be decided by [DG08]. ∎
We may now solve a problem of Baumslag’s [Bau86, Problem 4].
Corollary 7.4.
Parafree one-relator groups have negative immersions. In particular, they are hyperbolic, virtually special and their isomorphism problem is decidable.
Proof.
Corollary 7.5.
One-relator groups with negative immersions are residually finite and linear.
Corollary 7.6.
Let be a one-relator complex with negative immersions. Then every finitely generated subgroup of is hyperbolic.
Extending any of these results to all one-relator groups would require a better understanding of one-relator hierarchies that are not -stable. Therefore, we ask the following question.
Problem 7.7.
Characterise non -stable one-relator hierarchies.
Any one-relator group satisfying the hypothesis of Brown’s criterion (see [Bro87]), either has a one-relator splitting that is not -stable, or is isomorphic to a Baumslag–Solitar group . More generally, if is a one-relator splitting and there is some acting hyperbolically on its Bass–Serre tree and some such that , then splits as an ascending HNN-extension of a finitely generated free group. We ask whether this is the only situation that can occur.
Question 7.8.
Let be a one-relator complex and a one-relator splitting that is not -stable. Is there some such that one of the following holds
for all ?
If so, does there exist an immersion of one-relator complexes that does not factor through and such that has non-empty BNS invariant?
References
- [ABC+91] J. M. Alonso, T. Brady, D. Cooper, V. Ferlini, M. Lustig, M. Mihalik, M. Shapiro, and H. Short, Notes on word hyperbolic groups, Group theory from a geometrical viewpoint (Trieste, 1990), World Sci. Publ., River Edge, NJ, 1991, Edited by Short, pp. 3–63. MR 1170363
- [AG99] D. J. Allcock and S. M. Gersten, A homological characterization of hyperbolic groups, Invent. Math. 135 (1999), no. 3, 723–742. MR 1669272
- [Bau67] Gilbert Baumslag, Residually finite one-relator groups, Bull. Amer. Math. Soc. 73 (1967), 618–620. MR 212078
- [Bau69] by same author, Groups with the same lower central sequence as a relatively free group. II. Properties, Trans. Amer. Math. Soc. 142 (1969), 507–538. MR 245653
- [Bau86] by same author, A survey of groups with a single defining relation, Proceedings of groups—St. Andrews 1985, London Math. Soc. Lecture Note Ser., vol. 121, Cambridge Univ. Press, Cambridge, 1986, pp. 30–58. MR 896500
- [BC06] Gilbert Baumslag and Sean Cleary, Parafree one-relator groups, J. Group Theory 9 (2006), no. 2, 191–201. MR 2220574
- [BCH04] Gilbert Baumslag, Sean Cleary, and George Havas, Experimenting with infinite groups. I, Experiment. Math. 13 (2004), no. 4, 495–502. MR 2118274
- [Bes04] Mladen Bestvina, Questions in geometric group theory, 2004, https://www.math.utah.edu/ bestvina/eprints/questions-updated.pdf.
- [BF92] Mladen Bestvina and Mark Feighn, A combination theorem for negatively curved groups, J. Differential Geom. 35 (1992), no. 1, 85–101. MR 1152226
- [BFR19] Gilbert Baumslag, Benjamin Fine, and Gerhard Rosenberger, One-relator groups: an overview, Groups St Andrews 2017 in Birmingham, London Math. Soc. Lecture Note Ser., vol. 455, Cambridge Univ. Press, Cambridge, 2019, pp. 119–157. MR 3931411
- [BM22] Martín Axel Blufstein and Elías Minian, Strictly systolic angled complexes and hyperbolicity of one-relator groups, Algebr. Geom. Topol. 22 (2022), no. 3, 1159–1175. MR 4474781
- [Bra99] Noel Brady, Branched coverings of cubical complexes and subgroups of hyperbolic groups, J. London Math. Soc. (2) 60 (1999), no. 2, 461–480. MR 1724853
- [Bro87] Kenneth S. Brown, Trees, valuations, and the Bieri-Neumann-Strebel invariant, Invent. Math. 90 (1987), no. 3, 479–504. MR 914847
- [BW13] Hadi Bigdely and Daniel T. Wise, Quasiconvexity and relatively hyperbolic groups that split, Michigan Math. J. 62 (2013), no. 2, 387–406. MR 3079269
- [CH21] Christopher H. Cashen and Charlotte Hoffmann, Short, Highly Imprimitive Words Yield Hyperbolic One-Relator Groups, Experimental Mathematics 0 (2021), no. 0, 1–10.
- [Che21] Haimiao Chen, Solving the isomorphism problems for two families of parafree groups, J. Algebra 585 (2021), 616–636. MR 4282650
- [CM82] Bruce Chandler and Wilhelm Magnus, The history of combinatorial group theory, Studies in the History of Mathematics and Physical Sciences, vol. 9, Springer-Verlag, New York, 1982, A case study in the history of ideas. MR 680777
- [Col04] Donald J. Collins, Intersections of Magnus subgroups of one-relator groups, Groups: topological, combinatorial and arithmetic aspects, London Math. Soc. Lecture Note Ser., vol. 311, Cambridge Univ. Press, Cambridge, 2004, pp. 255–296. MR 2073350
- [Col08] by same author, Intersections of conjugates of Magnus subgroups of one-relator groups, The Zieschang Gedenkschrift, Geom. Topol. Monogr., vol. 14, Geom. Topol. Publ., Coventry, 2008, pp. 135–171. MR 2484702
- [Dah03] François Dahmani, Combination of convergence groups, Geom. Topol. 7 (2003), 933–963. MR 2026551
- [DG08] François Dahmani and Daniel Groves, The isomorphism problem for toral relatively hyperbolic groups, Publ. Math. Inst. Hautes Études Sci. (2008), no. 107, 211–290. MR 2434694
- [DV96] Warren Dicks and Enric Ventura, The group fixed by a family of injective endomorphisms of a free group, Contemporary Mathematics, vol. 195, American Mathematical Society, Providence, RI, 1996. MR 1385923
- [FRMW21] Benjamin Fine, Gerhard Rosenberger, Anja Moldenhauer, and Leonard Wienke, Topics in infinite group theory—Nielsen methods, covering spaces, and hyperbolic groups, De Gruyter STEM, De Gruyter, Berlin, [2021] ©2021. MR 4368862
- [FRS97] Benjamin Fine, Gerhard Rosenberger, and Michael Stille, The isomorphism problem for a class of para-free groups, Proc. Edinburgh Math. Soc. (2) 40 (1997), no. 3, 541–549. MR 1475915
- [Ger92] Stephen M. Gersten, Problems on automatic groups, Algorithms and classification in combinatorial group theory (Berkeley, CA, 1989), Math. Sci. Res. Inst. Publ., vol. 23, Springer, New York, 1992, pp. 225–232. MR 1230636
- [Ger96] by same author, Subgroups of word hyperbolic groups in dimension , J. London Math. Soc. (2) 54 (1996), no. 2, 261–283. MR 1405055
- [GKL21] Giles Gardam, Dawid Kielak, and Alan D. Logan, Algebraically hyperbolic groups, 2021, arXiv:2112.01331.
- [GMRS98] Rita Gitik, Mahan Mitra, Eliyahu Rips, and Michah Sageev, Widths of subgroups, Transactions of the American Mathematical Society 350 (1998), no. 1, 321–329.
- [Gro87] Mikhael Gromov, Hyperbolic groups, Essays in group theory, Math. Sci. Res. Inst. Publ., vol. 8, Springer, New York, 1987, pp. 75–263. MR 919829
- [Gro93] M. Gromov, Asymptotic invariants of infinite groups, Geometric group theory, Vol. 2 (Sussex, 1991), London Math. Soc. Lecture Note Ser., vol. 182, Cambridge Univ. Press, Cambridge, 1993, pp. 1–295. MR 1253544
- [GW19] Giles Gardam and Daniel J. Woodhouse, The geometry of one-relator groups satisfying a polynomial isoperimetric inequality, Proc. Amer. Math. Soc. 147 (2019), no. 1, 125–129. MR 3876736
- [Hat02] Allen Hatcher, Algebraic topology, Cambridge University Press, Cambridge, 2002. MR 1867354
- [HK17] Do Viet Hung and Vu The Khoi, Applications of the Alexander ideals to the isomorphism problem for families of groups, Proc. Edinb. Math. Soc. (2) 60 (2017), no. 1, 177–185. MR 3589847
- [HK20] by same author, Twisted Alexander ideals and the isomorphism problem for a family of parafree groups, Proc. Edinb. Math. Soc. (2) 63 (2020), no. 3, 780–806. MR 4163871
- [How81] James Howie, On pairs of -complexes and systems of equations over groups, J. Reine Angew. Math. 324 (1981), 165–174. MR 614523
- [How87] by same author, How to generalize one-relator group theory, Combinatorial group theory and topology (Alta, Utah, 1984), Ann. of Math. Stud., vol. 111, Princeton Univ. Press, Princeton, NJ, 1987, pp. 53–78. MR 895609
- [How05] by same author, Magnus intersections in one-relator products, Michigan Math. J. 53 (2005), no. 3, 597–623. MR 2207211
- [HW01] Geoffrey Christopher Hruska and Daniel T. Wise, Towers, ladders and the B. B. Newman spelling theorem, J. Aust. Math. Soc. 71 (2001), no. 1, 53–69. MR 1840493
- [HW16] Joseph Helfer and Daniel T. Wise, Counting cycles in labeled graphs: the nonpositive immersion property for one-relator groups, Int. Math. Res. Not. IMRN (2016), no. 9, 2813–2827. MR 3519130
- [IMM23] Giovanni Italiano, Bruno Martelli, and Matteo Migliorini, Hyperbolic 5-manifolds that fiber over , Invent. Math. 231 (2023), no. 1, 1–38. MR 4526820
- [IS98] Sergei V. Ivanov and Paul E. Schupp, On the hyperbolicity of small cancellation groups and one-relator groups, Trans. Amer. Math. Soc. 350 (1998), no. 5, 1851–1894. MR 1401522
- [Iva18] Sergei V. Ivanov, The intersection of subgroups in free groups and linear programming, Math. Ann. 370 (2018), no. 3-4, 1909–1940. MR 3770185
- [Kap00] Ilya Kapovich, Mapping tori of endomorphisms of free groups, Comm. Algebra 28 (2000), no. 6, 2895–2917. MR 1757436
- [Kap01] by same author, The combination theorem and quasiconvexity, Internat. J. Algebra Comput. 11 (2001), no. 2, 185–216. MR 1829050
- [KMS60] Abraham Karrass, Wilhelm Magnus, and Donald Solitar, Elements of finite order in groups with a single defining relation, Comm. Pure Appl. Math. 13 (1960), 57–66. MR 124384
- [KMW17] Olga Kharlampovich, Alexei Miasnikov, and Pascal Weil, Stallings graphs for quasi-convex subgroups, J. Algebra 488 (2017), 442–483. MR 3680926
- [Lin22] Marco Linton, One-relator hierarchies, Ph.D. thesis, University of Warwick, UK, 2022.
- [LL94] Robert H. Lewis and Sal Liriano, Isomorphism classes and derived series of certain almost-free groups, Experiment. Math. 3 (1994), no. 3, 255–258. MR 1329373
- [LS01] Roger C. Lyndon and Paul E. Schupp, Combinatorial group theory, Classics in Mathematics, Springer-Verlag, Berlin, 2001, Reprint of the 1977 edition. MR 1812024
- [LW17] Larsen Louder and Henry Wilton, Stackings and the -cycles conjecture, Canad. Math. Bull. 60 (2017), no. 3, 604–612. MR 3679733
- [LW22] by same author, Negative immersions for one-relator groups, Duke Math. J. 171 (2022), no. 3, 547–594. MR 4382976
- [LW24] by same author, Uniform negative immersions and the coherence of one-relator groups, Invent. Math. 236 (2024), no. 2, 673–712. MR 4728240
- [Lyn50] Roger C. Lyndon, Cohomology theory of groups with a single defining relation, Ann. of Math. (2) 52 (1950), 650–665. MR 47046
- [Mag30] Wilhelm Magnus, Über diskontinuierliche Gruppen mit einer definierenden Relation. (Der Freiheitssatz), J. Reine Angew. Math. 163 (1930), 141–165. MR 1581238
- [Mas06] Joseph D. Masters, Heegaard splittings and 1-relator groups, unpublished paper, 2006.
- [MKS66] Wilhelm Magnus, Abraham Karrass, and Donald Solitar, Combinatorial group theory: Presentations of groups in terms of generators and relations, Interscience Publishers [John Wiley & Sons], New York-London-Sydney, 1966. MR 0207802
- [MO15] Ashot Minasyan and Denis Osin, Acylindrical hyperbolicity of groups acting on trees, Math. Ann. 362 (2015), no. 3-4, 1055–1105. MR 3368093
- [Mol67] D. I. Moldavanskiĭ, Certain subgroups of groups with one defining relation, Sibirsk. Mat. Ž. 8 (1967), 1370–1384. MR 0220810
- [Mut21a] Jean Pierre Mutanguha, Constructing stable images, preprint on webpage at mutanguha.com/pdfs/relimmalgo.pdf, 2021.
- [Mut21b] Jean Pierre Mutanguha, The dynamics and geometry of free group endomorphisms, Adv. Math. 384 (2021), Paper No. 107714, 60. MR 4237417
- [MUW11] Alexei Myasnikov, Alexander Ushakov, and Dong Wook Won, The word problem in the Baumslag group with a non-elementary Dehn function is polynomial time decidable, J. Algebra 345 (2011), 324–342. MR 2842068
- [New68] B. B. Newman, Some results on one-relator groups, Bull. Amer. Math. Soc. 74 (1968), 568–571. MR 222152
- [Ros13] Amnon Rosenmann, On the intersection of subgroups in free groups: echelon subgroups are inert, Groups Complex. Cryptol. 5 (2013), no. 2, 211–221. MR 3245107
- [Sel97] Z. Sela, Acylindrical accessibility for groups, Invent. Math. 129 (1997), no. 3, 527–565. MR 1465334
- [Ser03] Jean-Pierre Serre, Trees, Springer Monographs in Mathematics, Springer-Verlag, Berlin, 2003, Translated from the French original by John Stillwell, Corrected 2nd printing of the 1980 English translation. MR 1954121
- [Sta83] John R. Stallings, Topology of finite graphs, Invent. Math. 71 (1983), no. 3, 551–565. MR 695906
- [Tar92] Gábor Tardos, On the intersection of subgroups of a free group, Invent. Math. 108 (1992), no. 1, 29–36. MR 1156384
- [Wis03] Daniel T. Wise, Nonpositive immersions, sectional curvature, and subgroup properties, Electron. Res. Announc. Amer. Math. Soc. 9 (2003), 1–9. MR 1988866
- [Wis04] D. T. Wise, Sectional curvature, compact cores, and local quasiconvexity, Geom. Funct. Anal. 14 (2004), no. 2, 433–468. MR 2062762
- [Wis05] Daniel T. Wise, Approximating flats by periodic flats in CAT(0) square complexes, Canad. J. Math. 57 (2005), no. 2, 416–448. MR 2124924
- [Wis14] by same author, Cubular tubular groups, Trans. Amer. Math. Soc. 366 (2014), no. 10, 5503–5521. MR 3240932
- [Wis20] by same author, An invitation to coherent groups, What’s next?—the mathematical legacy of William P. Thurston, Ann. of Math. Stud., vol. 205, Princeton Univ. Press, Princeton, NJ, 2020, pp. 326–414. MR 4205645
- [Wis21] by same author, The structure of groups with a quasiconvex hierarchy, Annals of Mathematics Studies, vol. 209, Princeton University Press, Princeton, NJ, [2021] ©2021. MR 4298722