On the regularity of optimal potentials in control problems governed by elliptic equations
Abstract
In this paper we consider optimal control problems where the control variable is a potential and the state equation is an elliptic partial differential equation of a Schrödinger type, governed by the Laplace operator. The cost functional involves the solution of the state equation and a penalization term for the control variable. While the existence of an optimal solution simply follows by the direct methods of the calculus of variations, the regularity of the optimal potential is a difficult question and under the general assumptions we consider, no better regularity than the one can be expected. This happens in particular for the cases in which a bang-bang solution occurs, where optimal potentials are characteristic functions of a domain. We prove the regularity of optimal solutions through a regularity result for PDEs. Some numerical simulations show the behavior of optimal potentials in some particular cases.
G. Buttazzo†, J. Casado-Díaz††, F. Maestre††
† Dipartimento di Matematica, Università di Pisa,
Largo B. Pontecorvo, 5
56127 Pisa, ITALY
†† Dpto. de Ecuaciones Diferenciales y Análisis Numérico,
Facultad de Matemáticas, C. Tarfia s/n
41012 Sevilla, SPAIN
Keywords: optimal potentials, BV regularity, bang-bang property, shape optimization, control problems.
2020 Mathematics Subject Classification: 49Q10, 49J45, 35B65, 35R05, 49K20.
1 Introduction
The starting point of our research is an optimal control problem of the form
| (1.1) |
governed by the state equation
| (1.2) |
Here is a bounded open subset of , the control variable is assumed to be nonnegative, , and are suitable integrands. We assume that has a superlinear growth, which automatically implies that the control variables are in . Notice that, when , the problem can be written in the variational form
where
In this case it is possible to see that the control variable can be eliminated, obtaining the auxiliary variational problem
| (1.3) |
where denotes the Fenchel-Moreau conjugate of the function . Setting , the unique solution of (1.3) can be obtained through the PDE
| (1.4) |
and the optimal control can be then recovered as
For general integrands the elimination procedure above is not possible, and the necessary conditions of optimality involve an adjoint state variable and the corresponding adjoint PDE. Nevertheless, we can show that the optimal control problem (1.1), (1.2) admits a solution . The main goal of the present paper is to show that, under suitable assumptions on the data, the optimal control has additional regularity properties. In particular, we show that .
We stress that, under the general assumptions we consider on the function , higher regularity properties on do not hold. Indeed, when
the optimal control is of bang-bang type, that is
for a suitable set , which then turns out to be a set with finite perimeter.
Problems of this form arise for instance in some biological models, governed by logistic diffusive equations, where one aims to control the size of a total population or the optimal location of resources, see for instance [20] and [21].
The proof of the regularity above is obtained through a careful analysis of a nonlinear elliptic PDE of the form (1.4). In general, for the cases arising from optimal control problems, the right-hand side has a low summability and does not belong to the space ; the definition of solution is then more involved and has to be given as in the theory of renormalized solutions (see for instance [3], [17]).
In Section 2 we list the notation that is used along the paper, in Section 3 we study the semilinear problems (1.4) with the nonlinearity possibly discontinuous and the right-hand side having a low summability. Our goal is to show that, when , the solution is such that . Section 4 deals with the application of the result above to the optimal control problem (1.1), (1.2). In Section 5 we consider some relevant examples with various particular choices of the data. Finally in Section 6 we provide some numerical simulations which show the bang-bang behavior of optimal solutions in some cases, as well as the continuous behavior in some other ones.
2 Notation
In this section we fix the notation that we use in the rest of the paper.
-
•
For , we denote by the sign of .
-
•
For a measurable set , we denote by its Lebesgue measure.
-
•
For a function , and , we denote by , and the limits on the left and on the right in , respectively (if they exist).
-
•
For we define the functions by
-
•
We denote by the space of Borel measures in with finite total mass.
-
•
If is a lower semicontinuous proper convex function, we denote by the domain of , defined by
It is a non-empty interval of , which we assume not reduced to a point. For , we denote by the subdifferential of at , defined by
(2.1) Taking into account that the map
(2.2) is non-decreasing in both variables and , we have that for every the two limits
exist and
(2.3) We also recall that every convex function is locally Lipschitz in the interior of its domain.
-
•
We denote by the Fenchel-Moreau conjugate of , defined by
We recall that is also a convex lower semicontinuous function and that
Moreover, we have
(2.4)
In the following we consider the integral functionals
The function is assumed lower semicontinuous proper and convex, and such that
| (2.5) |
in this way the functional is well defined on and implies that . It is easy to see that, with the conditions above, the function is bounded from below; hence up to the addition of a constant, that does not modify our optimization problem, we may assume non-negative.
Concerning the integrand we assume measurability in , lower semicontinuity in and the bound
| (2.6) |
for suitable and .
The optimization problem we consider is then
where is prescribed. In Section 4 we show that the optimal control problem above admits an optimal pair . Under some additional assumptions, we obtain the corresponding necessary conditions of optimality and we study the regularity properties of .
3 Semilinear problems with a discontinuous term
In the present section we are interested in the existence and regularity properties of the solutions of a semi-linear problem of the form
| (3.1) |
where the function is non-decreasing and not necessarily continuous. Moreover, we assume only low integrability on the right-hand side . In particular, we do not assume , which leads us to work with renormalized or entropy solutions (see for instance [3], [4], [16]). In this sense, we introduce the following definition of solution for problem (3.1).
Definition 3.1.
Assume . We say that a pair is a solution of (3.1) if it satisfies
| (3.2) | |||
| (3.3) | |||
| (3.4) |
The existence and uniqueness of solutions for problem (3.1) is given by the following theorem.
Theorem 3.2.
Remark 3.3.
Assuming in Theorem 3.2, in , with , the classical estimates for renormalized solutions (see for instance [3], [4], [17]) combined with Stampacchia’s estimates (see [25]) also prove that the solution of (3.1) satisfies
| (3.7) |
In particular, assuming , we have that the solution in Theorem 3.2 is in . In this case, it can be defined in a simpler way as the unique solution of the strictly convex minimum problem
with defined by
Remark 3.4.
Theorem 3.2 and (3.7) can be extended with the same proofs to the case where the operator is replaced by with a matrix function in satisfying the ellipticity condition
Moreover, the equation
| (3.8) |
is satisfied in the sense of distributions for . Indeed, in the case of the Laplacian operator, since is an isomorphism from into , for , it is known that (3.4) is equivalent to require that satisfies (3.8) in the distributions sense in . Thus, Theorem 3.2 shows that for every , there exists a unique solution , , in the distributions sense, of
| (3.9) |
However, if we replace by with as above, this is no longer true. We refer to [24] for a classical counter-example to the uniqueness of the distributional solution.
The following result proves the continuous dependence with respect to the right-hand side and a maximum principle.
Theorem 3.5.
Let be a bounded open set and a non-decreasing function. For we take , solutions of (3.1) with and respectively. Then, we have
| (3.10) | |||
| (3.11) | |||
| (3.12) |
The constant in this last inequality only depends on if . For it only depends on , and . In addition,
Our main result in this section proves that the function in Theorem 3.2 is in when is in . It will be used in Theorem 4.7 to deduce some regularity results for the solution of a control problem governed by an elliptic equation, where the control variable corresponds to the coefficients of the zero order’s term.
Theorem 3.6.
Let be a bounded open set of class , and a non-decreasing function. Then, for the solution of (3.9) is in . Moreover, there exists depending only on such that
| (3.13) | |||
| (3.14) |
Proof of Theorem 3.2.
When is a continuous function, the result is well known from the theory of renormalized solutions for elliptic PDE (see for instance [3], [4], [17]). We recall how the corresponding estimates are obtained.
Taking , with as test function in (3.4) we have
| (3.15) |
Thanks to the fact that is non-decreasing, we have a.e. in and this gives the second estimate in (3.6). From this inequality, using the argument in Theorem 1 of [4], we conclude that satisfies (3.6).
Let us now prove the existence of solution for (3.9) in the case of just non-decreasing. For this purpose we replace by , , with a sequence of mollifiers functions defined as
with
Then, satisfies
| (3.16) |
Taking the solution of (3.1) for , and using estimates (3.5) and (3.6), we deduce the existence of a subsequence of , still denoted by , and a function such that
| (3.17) | |||
| (3.18) | |||
| (3.19) |
From (3.15) we also have
for every . Dividing by and taking the limit as , gives
| (3.20) |
Let us prove that is compact in the weak topology of . By (3.16), (3.19) and the Dunford-Pettis theorem, it is enough to prove that is equi-integrable, i.e. that for every , there exists such that
For such , thanks to (3.20), there exist such that
Choosing then
and taking into account (3.16), we deduce that for every , measurable with , we have
On the other hand, since every finite subset of functions in is equi-integrable, there exists such that
Thus, taking we deduce the equi-integrability of . Extracting a subsequence if necessary, we then deduce the existence of such that
| (3.21) |
From (3.16), (3.17) and the Rellich-Kondrachov compactness theorem, we also have
Let us prove that satisfies (3.4). We take such that there exists with a.e. in For , we use as test function in the equation for . We get
Taking into account (3.18), (3.21) and the fact that is bounded in and converges in measure to , we can pass to the limit as in this inequality to get
By (3.20), and a.e. in , we can now pass to the limit as to deduce that (3.4) holds.
Proof of Theorem 3.5.
Let us assume . The case is simpler taking into account the continuous imbedding of into .
For , we take as test function in the difference of the equations satisfied by and . This gives
| (3.22) |
Here we use the second estimate in (3.6) for , , with , which dividing by and taking the limit as , gives
This allows us to pass to the limit in (3.22), as , to deduce
| (3.23) |
Now, we observe that the conditions
imply
Therefore (3.23) proves
Adding the analogous inequality with replaced by each other, we deduce (3.11). This inequality also implies (3.12) (see [4]).
Proof of Theorem 3.6.
Let us first assume in , . Then belongs to . Taking into account the boundary condition on , and , we can use equation (4.19) in the proof of Lemma 4.3 in [16] to prove that the second derivatives of satisfy
| (3.24) |
where denotes the unitary outside normal to , satisfy
and they only depend on .
For , we multiply the first equation in (3.24) by
Integrating by parts, adding in , and using the boundary conditions in (3.24), we get
Using here that
a.e. in , we can pass to the limit as to deduce
| (3.25) |
In the first term of the right-hand side, we can apply the trace theorem for functions in which proves the existence of depending only on such that
| (3.26) |
Using also that the imbedding of into is compact for , we deduce that for every , there exists depending on , and , such that
Applying then that is continuous from into , and the trace theorem for Sobolev spaces, we conclude that, for another constant , we have
which combined with (3.5), with , proves
| (3.27) |
with depending on and .
Choosing such that , we can use (3.26) and (3.27) in (3.25), to conclude the existence of depending only on such that (3.14) holds. From this estimate, the continuous imbedding of into , and solution of (3.9), with , we also have that satisfies (3.13). This proves the result for , .
The case where is just an increasing function follows by approximating by a sequence of smooth functions as in the proof of Theorem 3.2.
The case where is just in follows by replacing by a sequence in , such that converges to in and converges to . ∎
4 Applications to optimal potentials problems
In this section, we are interested in the study of an optimal control problem for an elliptic equation of a Schrödinger type, where the control variable is the potential. Namely, we consider the problem
| (4.1) |
where is a lower semicontinuous convex function. The constraint in is introduced in the cost functional taking
Problems of this type intervene in several shape optimization problems, where is a Borel measure of capacitary type, not Radon in general (see for instance [2], [5], [6], [7], [16], [9], [10], [12], [13], [14] and [22]). Similarly to these papers, the solution of (4.1) must be understood in the variational sense
In the present paper, we are interested in obtaining some regularity results for the optimal controls , which in our case are integrable functions. In particular, we show that in several cases the optimal controls are of bang-bang type, and then discontinuous. However, we show that, under some suitable assumptions, is a function and then that the interfaces have finite perimeter.
Our first result proves the existence of solution for (4.1). We refer to Theorem 2.19 in [16] for a related result in a more general setting.
Theorem 4.1.
The optimality conditions for (4.1) are given by Theorem 4.2 below (see also Theorem 4.1 in [16]). Since our aim in the present work is to present some regularity conditions for the solutions of problem (4.1), let us assume that the right-hand side in the state equation satisfies
| (4.2) |
By Stampacchia’s estimates (see for instance [25]), this implies that there exists , such that for every , a.e. in , the solution of the state equation in (4.1) is in , with . In particular, this means that the value of for is not important and then we can replace in Theorem 4.1 condition (2.6) by
Further we will assume and satisfying
| (4.3) |
In these conditions, the following result holds.
Theorem 4.2.
Remark 4.3.
Taking into account that , lower semicontinuous and (2.5) we deduce that
and that, taking
| (4.8) |
one of the following conditions hold
Therefore, for every , there exists such that .
Remark 4.4.
From (4.7) and the regularity results for elliptic equations, we deduce that the optimal measure is very regular if is and the functions and are very regular too. In this sense, the following proposition provides some necessary and sufficient conditions to have continuous and locally Lipschitz-continuous respectively.
Proposition 4.5.
Further assumptions on than those in Proposition 4.5 provide more regularity for , but it is interesting to note that
with defined by (4.8). Thus, cannot be an analytic function if Even more, we have the following result.
Proposition 4.6.
Assume that defined by (4.8) is such that . Then
| (4.12) |
From Proposition 4.5, we have that (and then ) is not continuous if is not strictly convex. Moreover, Proposition 4.6 shows that even if is continuous, it is not derivable in general. Theorem 4.7 below provides a sufficient condition to get in , and then shows that the discontinuity surfaces of have finite perimeter.
Theorem 4.7.
Remark 4.8.
In the assumptions of Theorem 4.7, the functions , are continuous, and thus, the set is a closed subset of (which contains the boundary). The fact that belongs to , proves then that belongs to .
Remark 4.9.
Since is non-decreasing, a sufficient condition to have non-decreasing is to assume , with defined by (4.8).
Proof of Theorem 4.1.
In order to prove the existence of solution, we apply the direct method of the calculus of variations. We take , a.e. in , such that the solution of the state equation in (4.1) satisfies
where we have denoted by the infimum of (4.1). In particular
which, taking into account (2.5), implies that is compact in the weak topology of . Moreover, implies that is bounded in . Therefore, extracting a subsequence if necessary, there exist , and such that
| (4.16) |
From these convergences, the Rellich-Kondrachov compactness theorem, the lower semicontinuity of , and Fatou’s Lemma, we deduce
Proving then that is the solution of (4.5), we will deduce that is a solution of (4.1). For this purpose, given , and , we take as test function in the equation satisfied by . This gives
By (4.16), the Rellich-Kondrachov compactness theorem, and bounded in , we can pass to the limit in , in the three last terms in this equality. In the first term, we can use that is bounded in and that belongs to . Thus, there exists independent of such that
Using that converges strongly to in as , and the Lebesgue dominated convergence theorem, we can pass to the limit as in this equality to get
If is just in , we prove that this equality also holds true just replacing by and then passing to the limit as . ∎
Proof of Theorem 4.2.
Let be a solution of (4.1) and define , as the solutions of (4.5) and (4.6) respectively. Since satisfies (4.2), Stampacchia’s estimates (see [25]) show that belongs to . By (4.3) we then have that solution of (4.6) is well defined and belongs to .
Now, for another non-negative function such that is integrable, , and , we define as
and as the solution of
Taking into account that
that is a solution of (4.1), and the convexity of , we deduce
for every . Using then that
with the solution of
we get
| (4.17) |
On the other hand, taking as test function in (4.6), and as test function in (4.5) we deduce
Therefore (4.17) provides
Using here that , , and belong to and that the second assertion in (4.3), solution of (4.6) and Stampacchia’s estimates imply that is in , we can take the limit as to deduce
This implies that satisfies
or equivalently,
By (2.4) this is also equivalent to , and also to From (2.3) applied to and Remark 4.4 we then deduce the third assertion in (4.7). Combined with and in , this also implies that is in . ∎
Proof of Proposition 4.5.
Let us prove (4.10). If is strictly convex, the quotient function defined by (2.2) restricted to the set
is strictly increasing in and . This proves
By Remark 4.3, this implies that for every , there exists a unique such that . By definition (4.4) of we deduce that agrees with such . Now, we observe that the lower semicontinuity of and definition (2.1) of imply the following continuity property for :
Thanks to the uniqueness of proved above, this can also be read as
and then proves the continuity of .
For the reciprocal, we argue by contradiction. If is not strictly convex, then, there exists an interval , with such that is an affine function with a certain slope in this interval. Moreover can be chosen as
If , defined by (4.8), then and thus, definition (4.4) of implies
If , then for every , and thus
In both cases, we conclude that is not continuous at .
In order to prove (4.11) we first observe that the right-hand side implies strictly convex. Since implies continuous, we conclude that the left-hand side in (4.11) also implies strictly convex. Therefore it is enough to prove the result for strictly convex. As we saw at the beginning of the proof, this implies that for every there exists a unique such that , and this satisfies Then, taking into account (2.3), we deduce the existence of such that
for every , is equivalent to
for every , and then, that (4.11) holds. ∎
Proof of Proposition 4.6.
Since , we have , and then for every . Therefore, if is derivable at , we must have
Thus, for every , there exists such that implies
which by (4.9) can also be read as
and then that
Taking and letting , this gives
and then
The proof of the reciprocal follows by a similar argument. ∎
5 Some examples
In the present section we illustrate the results obtained in the previous one, by applying them to some classical examples. In Section 6 we will also perform some numerical computations relative to these examples.
First example. We consider the case where we are looking for a non-negative function such that the solution of the state equation in (4.1) minimizes
| (5.1) |
and it is such that the norm of in some space , is not too large. This can be modeled by (4.1), with given by
with a positive to parameter to choose. Then,
By Theorem 4.1 and by the fact that is strictly convex, we have that is continuous. It is in when , i.e. when condition (4.12) holds, and it is locally Lipschitz continuous if , (and then condition (4.11) holds in bounded subsets of ).
From (4.7), we deduce that, taking and regular enough, every solution of (4.1) satisfies
| (5.2) |
with and the solutions of (4.5) and (4.6) respectively. In particular, this means that , solve the nonlinear system
| (5.3) |
By Theorem 4.7 we obtain that
belongs to (and even to ). However, in order to have in , we need to be in , which is not clear for , i.e. when is not locally Lipschitz.
Second example. We now consider the case where we want to minimize functional (5.1), with the solution of the state equation in (4.1), under the constraint , with . The problem corresponds to (4.1), with given by
| (5.4) |
Thus, , and
As expected, since is not strictly convex, we get by (4.10) that is not continuous. Condition (4.7) reads in this case as
| (5.5) |
Therefore, the value of is not determined on the set where vanishes. When this set has zero measure, assertion (5.5) shows that is a bang-bang control, which only takes the values and . Taking into account that is non-decreasing, we deduce from Theorem 4.7 that is in .
As a simple case where we can assure that is a bang-bang control, we take
| (5.6) |
Assuming , with satisfying (4.15), we have that are in . Therefore, (4.5) and (4.6) imply
Thus, assuming we conclude that the set has zero measure.
It is also simple to give a counterexample where the set has positive measure and the control is not a bang-bang control. Just take , not constant, and the solution of (4.5), with replaced by . Defining
we deduce that problem (4.1) has the unique solution , for which the functional vanishes. Observe that in this case a.e. in , and then is the null function. Therefore the set is the whole set , and condition (5.5) does not provide any information about .
Third example. We consider a mixture of the first and second examples. Now, the goal is to minimize (5.1), with the solution of the state equation in (4.1) and , such that its norm in is not too great, with . The problem corresponds to take in (4.1)
with a positive constant to choose.
In the strictly convex case , we have
As in the first example, the strict convexity of provides a function which is continuous. Therefore, the optimal controls are continuous and even, they are in some Sobolev space if (assuming and smooth enough).
In the case , we have
As in the second example, (4.7) provides
and then the optimal controls are bang-bang controls if the set has null measure.
Since is still a non-decreasing, Theorem 4.7 proves that is in for every optimal control . Using also that in a neighborhood of the closed set we deduce that in this case is also in .
As a particular case we can take
| (5.7) |
This is a classical problem corresponding to the minimization of the energy. In this case control problem (4.1) can also be written in the simplest form
| (5.8) |
For , it is clear that the solution corresponds to . Thus, the interesting case corresponds (as we assumed above) to . This means that we just want to spend a limited amount of the optimal potential (for example, because it is more expensive).
From (5.7) we get , and then (4.7) gives
| (5.9) |
Taking , with satisfying (4.15), we have in , and then (4.5) provides
Therefore, a sufficient condition to have a bang-bang control is to assume that the set has null measure. This holds in particular if is positive, belongs to and is large enough.
Fourth example. Related to the case in the third example, let us take
with , . In this case we are interested in controls which take their values in and its integral is large. Similarly to the third example, we have
Theorem 4.1 proves that the optimal controls satisfy
and then they are not continuous in general. Moreover, in this case the function
decreases at . Thus, this is an example where Theorem 4.7 does not apply and therefore, we do not know if is in .
A classical example corresponds to the maximization of the energy i.e. (compare with (5.7))
| (5.10) |
Similarly to (5.8), it is known that the problem can also be written as
| (5.11) |
For the solution is given by and then the interesting case is , as assumed above. Now, the function is equal to , and therefore satisfies (compare with (5.9)
Thus, a suffcient condition to assure that the optimal controls only take the values and is also to asume that the set has null measure.
6 Some numerical simulations
In this section, we illustrate the results of the previous ones through the numerical resolution, in the 2D case, of problem (4.1) for the first three examples in Section 5. For the first example we will consider and for the third one . We apply a gradient descent method with projection. It depends of the function associated to the volume constraint of the potential. The corresponding algorithm is related to Theorem 4.2 providing the optimality conditions to (4.1). We refer to [1], [15] for similar algorithms in optimal design problems. It reads as follows.
-
•
Initialization: choose an admisible function , such that .
- •
-
•
Stop if , for small.
In all the simulations we have chosen as the ball of center zero and radius one in dimension two. For the first example, we have chosen a simple case where the solution is radial. Thus, we just solve the corresponding one-dimensional problem. The implementation for this example has been carried out using Matlab R2022a. The second and third examples have been implemented using the free software FreeFemm++ v 4.4-3 (see [19] and http://www.freefem.org/). The corresponding results are as follows.
First example. For , we take:
Taking as the null function, the solution of the state equation in (4.1) is
Thus, the interesting case corresponds to . When assumption (2.5) is not satisfied, and the optimal control is not necessarily given by a function (we refer to [6], [8], [9], [10], [11], [12], [13] for some other existence results on optimal potentials). Indeed, it can be proved that the optimal control is given by the Radon measure
where is the 1-dimensional measure and is characterized by
The corresponding optimal control is given by
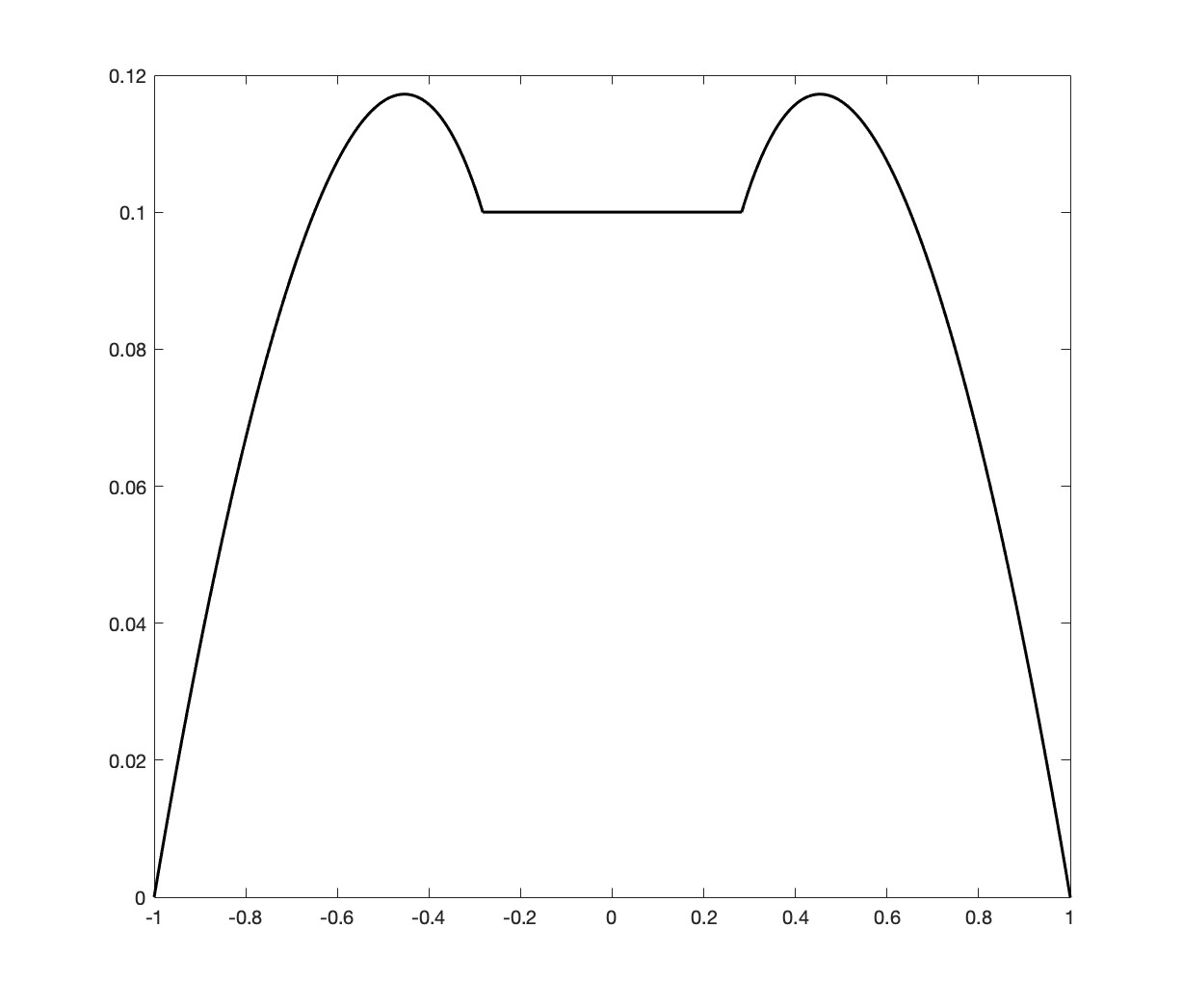
In Figure 1 we represent the optimal state function for (then )
In Figure 2 we represent on the top the optimal control and optimal state function obtained by solving the above problem (corresponding to ) numerically. In the middle and the bottom we also represent the optimal control and optimal state function, taking and respectively. Since the solutions are radial functions, we have applied the algorithm to the corresponding one-dimensional problem. Observe that in this radial representation the singular part of the optimal measure is given by two Dirac masses at and . In the numerical computation this provides the two corners which appear in the figure.






Second example. As a particular case of the second example in the previous section, we take
with
The right-hand side in the state equation in (4.1) is given by
Since the function changes sign several times, we expect that the corresponding optimal state function , solution of (4.5), changes sign several times too. The function , which is the right-hand side of the adjoint state function , solution of (4.6), also changes sign four times. Taking into account (5.5), this produces a bang-bang control with and being exchanged in several regions. For our numerical experiments we consider , and we take three different values for : , and . The corresponding results are shown in Figure 3. We observe that as grows up, the optimal control is concentrated on smaller sets. We expect that for tending to infinity, goes to a singular measure.




Third Example. In this case we take
and
where () are small balls of radius and centers , , and . Taking , , we have carried out three numerical experiments corresponding to , and respectively. The results are given in Figure 4. We get a bang-bang optimal potential for the three experiments. Moreover, as expected, the norm in of increases when decreases, taking the values , and respectively.




Acknowledgments. The work of GB is part of the project 2017TEXA3H “Gradient flows, Optimal Transport and Metric Measure Structures” funded by the Italian Ministry of Research and University. GB is member of the Gruppo Nazionale per l’Analisi Matematica, la Probabilità e le loro Applicazioni (GNAMPA) of the Istituto Nazionale di Alta Matematica (INdAM).
The work of JCD and FM is a part of the FEDER project PID2020-116809GB-I00 of the Ministerio de Ciencia e Innovación of the government of Spain and the project UAL2020-FQM-B2046 of the Consejería de Transformación Económica, Industria, Conocimiento y Universidades of the regional government of Andalusia, Spain.
References
- [1] G. Allaire. Shape optimization by the homogenization method. Appl. Math. Sci. 146, Springer-Verlag, New York 2002.
- [2] J.C. Bellido, G. Buttazzo, B. Velichkov. Worst-case shape optimization for the Dirichlet energy. Nonlinear Anal., 153 (2017), 117–129.
- [3] P. Bénilan, L. Boccardo, T. Gallouët, R. Gariepy, M. Pierre, J.L. Vázquez. An -theory of existence and uniqueness of solutions on nonlinear elliptic equations. Ann. Scuola Norm. Sup. Pisa Cl. Sci., 22 (2) (1995), 241–273.
- [4] L. Boccardo, T. Gallouët. Non-linear elliptic and parabolic equations involving measure data. J. Funct. Anal., 87 (1989), 149–169.
- [5] D. Bucur. Minimization of the -th eigenvalue of the Dirichlet Laplacian. Arch. Ration. Mech. Anal., 206 (3) (2012), 1073–1083.
- [6] D. Bucur, G. Buttazzo. Variational Methods in Shape Optimization Problems. Birkhäuser, Basel 2005.
- [7] D. Bucur, G. Buttazzo, B. Velichkov. Spectral optimization problems for potentials and measures. SIAM J. Math. Anal., 46 (4) (2014), 2956–2986.
- [8] G. Buttazzo, J. Casado-Díaz, F. Maestre. On the existence of optimal potentials on unbounded domains. SIAM J. Math. Anal., 53 (2021), 1088–1121.
- [9] G. Buttazzo, G. Dal Maso Shape optimization for Dirichlet problems: relaxed solutions and optimality conditions. Appl. Math. Optim., 23 (1991), 17–49.
- [10] G. Buttazzo, G. Dal Maso. An existence result for a class of shape optimization problems. Arch. Ration. Mech. Anal., 122 (1993), 183–195.
- [11] G. Buttazzo, A. Gerolin, B. Ruffini, B. Velichkov. Optimal potentials for Schördinger operators. J. Éc. Polytech. Math., 1 (2014), 71–100.
- [12] G. Buttazzo, F. Maestre, B. Velichkov. Optimal potentials for problems with changing sign data. J. Optim. Theory Appl., 178 (3) (2018), 743–762.
- [13] G. Buttazzo, B. Velichkov. A shape optimal control problem with changing sign data. SIAM J. Math. Anal., 50 (3) (2018), 2608–2627.
- [14] E.A. Carlen, R.L. Frank, E.H. Lieb. Stability Estimates for the Lowest Eigenvalue of a Schrödinger Operator. Geom. Funct. Anal., 24 (1) (2014), 63–84.
- [15] J. Casado-Díaz. Optimal design of multi-phase materials with a cost functional that depends nonlinearly on the gradient. SpringerBriefs in Mathematics, Springer, Cham 2022.
- [16] G. Buttazzo, J. Casado-Díaz, F. Maestre. On the existence of optimal potentials on unbounded domains. SIAM J. Math. Anal., 53 (2021), 1088–1121.
- [17] G. Dal Maso, F. Murat, L. Orsina, A. Prignet. Renormalized solutions of elliptic equations with general measure data. Ann. Scuola Norm. Sup. Pisa Sci., 28 (1999), 741–808.
- [18] E. Giusti. Minimal surfaces and function of bounded variation. Birkhäuser, Boston 1984.
- [19] F. Hecht New development in FreeFem++. J. Numer. Math., 20 (2012), 251–265.
- [20] I. Mazari, G. Nadin, Y. Privat. Optimisation of the total population size for logistic diffusive equations: bang-bang property and fragmentation rate. Comm. Partial Differential Equations, 47 (4) (2022), 797–828.
- [21] I. Mazari, G. Nadin, Y. Privat. Optimal location of resources maximizing the total population size in logistic models. J. Math. Pures Appl., 134 (2020), 1–35.
- [22] D. Mazzoleni, A. Pratelli. Existence of minimizers for spectral problems. J. Math. Pures Appl., 100 (3) (2013), 433–453.
- [23] D. Gilbarg, N. Trudinger. Elliptic partial differential equations of second order. Springer, Berlin 1998.
- [24] J. Serrin. Pathological solution of elliptic differential equations. Ann. Scuola Norm. Sup. Pisa Cl. Sci., 18 (1964), 385–387.
- [25] G. Stampacchia. Le problème de Dirichlet pour les équations elliptiques du second ordre à coefficients discontinus. Ann. Inst. Fourier, 15 (1965), 189–258.