On the Generalized Birth-Death Process and its Linear Versions
P. Vishwakarma
Pradeep Vishwakarma, Department of Mathematics,
Indian Institute of Technology Bhilai, Durg 491001, INDIA.
[email protected] and K.k. Kataria
Kuldeep Kumar Kataria, Department of Mathematics,
Indian Institute of Technology Bhilai, Durg 491001, INDIA.
[email protected]
Abstract.
In this paper, we consider a generalized birth-death process (GBDP) and examined its linear versions. Using its transition probabilities, we obtain the system of differential equations that governs its state probabilities. The distribution function of its waiting-time in state given that it starts in state is obtained. For a linear version of it, namely, the generalized linear birth-death process (GLBDP), we obtain the probability generating function, mean, variance and the probability of ultimate extinction of population. Also, we obtain the maximum likelihood estimate of one of its parameter. The differential equations that govern the joint cumulant generating functions of the population size with cumulative births and cumulative deaths are derived. In the case of constant birth and death rates in GBDP, the explicit forms of the state probabilities, joint probability mass functions of population size with cumulative births and cumulative deaths, and their marginal probability mass functions are obtained. It is shown that the Laplace transform of a stochastic integral of GBDP satisfies its Kolmogorov backward equation with certain scaled parameters. Also, the first two moments of the stochastic path integral of GLBDP are obtained. Later, we consider the immigration effect in GLBDP for two different cases. An application of a linear version of GBDP and its stochastic path integral to vehicles parking management system is discussed.
Key words and phrases:
Extinction probability; birth-death process; generalized birth-death process; generalized linear birth-death process; generalized linear birth-death process with immigration.
2010 Mathematics Subject Classification:
Primary : 60J27; Secondary: 60J20
1. Introduction
The birth-death process (BDP) is a continuous-time and discrete state-space Markov process which is used to model the growth of population with time. If for all are the birth rates and for all are the death rates then, in an infinitesimal time interval of length , the probability of a birth equals , probability of a death equals and probability of any other event is . Here, denotes the population size at a given time . In BDP, the transition rates can depend on the state of the process. If the transition rates in BDP are linear, that is, and then it is called the linear birth-death process (LBDP).
The BDP has various applications in the fields of engineering, queuing theory and biological sciences etc. For example, it can be used to model the number of customers in queue at a service center or the growth of bacteria over time. However, it has certain limitation, for example, it is not a suitable process to model the situations involving multiple births or multiple deaths in an infinitesimal time interval.
Doubleday (1973) introduced and studied a linear birth-death process with multiple births and single death.
Here, we consider a generalized version of the BDP where in an infinitesimal time interval there is a possibility of multiple but finitely many births or deaths with the assumption that the chance of simultaneous birth and death is negligible. We call this process as the generalized birth-death process (GBDP) and denote it by . It is shown that the state probabilities , of GBDP solve the following system of differential equations:
(1.1)
with initial conditions and for all . Here, for each , is the rate of birth of size and for each , is the rate of death of size .
If birth and death rates are linear in GBDP, that is, and for all , then we call this process as the generalized linear birth-death process (GLBDP). It is denoted by . The state probabilities of GLBDP are the solution of the following system of differential equations:
where for all .
It is shown that the cumulative distribution function is given by
where is the waiting time of GBDP in state given that it starts in state . On using the distributions of these waiting times, we obtain the maximum likelihood estimate of the parameter in GLBDP.
In Section 3, for GLBDP, we obtain some results for the cumulative births , that is, the total number of births by time and for the cumulative deaths , that is, the total number of deaths by time . We study a particular case of GBDP, where the birth and death rates are constant. We denote this process by . Let and be the total number of births and deaths in up to time , respectively. We obtain the explicit forms of probability mass functions (pmfs) of , and and their joint distributions.
In Section 4, we consider a stochastic integral of GBDP and show that its Laplace transform satisfies the backward equation for GBDP with some scaled parameters. We study the joint distribution of GLBDP and its stochastic path integral. A similar study is done for GBDP with constant birth and death rates.
In Section 5, we study the effect of immigration in GLBDP for two different cases. Let is the rate of immigration from outside environment. First, we consider the immigration effect only if the population vanishes at any time . In this case, the birth rates are , for all and the death rates are , for all . Then, we consider the effect of immigration at every state of the GLBDP. In this case, the birth and death rates are and , , respectively.
In the last section, we discuss an application of a linear case of GBDP to vehicle parking management system.
2. Generalized birth-death process
First, we consider a generalized birth-death process (GBDP) where in an infinitesimal time interval of length there is a possibility of either finitely many births with positive rates or finitely many deaths with positive rates . It is important to note that the birth and death rates may depend on the number of individuals present in the population at time . It is assumed that the chances of simultaneous occurrence of births and deaths in such small intervals are negligible.
We denote the GBDP by . With the above assumptions, its transition probabilities are given by
(2.1)
where as .
Let , be the state probabilities of GBDP. Then, we have
Thus, the waiting time of GBDP is exponentially distributed with parameter .
For , it follows exponential distribution with parameter (see Karlin and Taylor (1975), p. 133).
2.1. A linear case of GBDP
When the birth and death rates are linear, that is, and for all , and , we call the GBDP as the generalized linear birth-death process (GLBDP) and denote it by . From (2.2), it follows that the state probabilities of GLBDP solve the following system of differential equations:
(2.4)
with initial conditions
(2.5)
where for all .
Remark 2.3.
If for all , then the GLBDP reduces to generalized linear pure birth process.
Remark 2.4.
In the case of GLBDP, the waiting time in state has the exponential distribution with parameter .
Next, we obtain the system of differential equations that governs the probability generating function (pgf) of GLBDP.
Proposition 2.2.
Let be the pgf of GLBDP. It solves the following partial differential equation:
(2.6)
with initial condition .
Proof.
By using (2.5), we have
On multiplying on both sides of (2.4) and by adjusting the terms, we get
(2.7)
Summing over on both sides of (2.7) gives the required result. Here, the change of sum and derivative is justified because
This completes the proof.
∎
Remark 2.5.
For , the GLBDP reduces to LBDP. Its pgf solves (see Bailey (1964))
with .
Remark 2.6.
The Laplace transform of the pgf of GLBDP
is the solution of following differential equation:
Next, we discuss the solution of (2.6).
First, we rewrite (2.6) as follows:
(2.8)
where
We apply the method of characteristics to solve (2.8), and thus we get the following subsidiary equations:
(2.9)
and
(2.10)
where .
Moreover, we assume that the roots of are distinct which can be ensured by a small perturbation in and .
So, (2.9) can be rewritten as
(2.11)
where
On solving (2.10) and (2.11), we get and ,
respectively. Here, and are real constants and
(2.12)
Thus, the arbitrary solution of (2.6) is obtained in the following form:
(2.13)
where is some real-valued function which can be determined by using the given initial condition, that is, . Note that there always exist a such that and has same sign for all . So, is a monotone function in and its inverse exist.
Hence, (2.13) holds with for all and by using the analytic continuation it can be extended to all such that .
Remark 2.7.
Let be the initial distribution of GLBDP. Then, its pgf has the following form:
In particular, if then
Its proof follows along the similar lines to that of (2.13).
Next, we obtain the probability of ultimate extinction of GLBDP.
Let be the probability of ultimate extinction in GLBDP. We use the inverse function representation of to approximate the extinction probability .
Let , where is given in (2.12).
If is the least positive root of then is a monotone function in and . So,
for all and
As
where is some positive real number. So, we have
On taking , we get
Thus, if the process run for infinitely long time then the probability of ultimate extinction converges exponentially to , that is,
(2.14)
Remark 2.8.
In the case of LBDP, the above results reduce to the results given in Bailey (1964).
For , and such that , we get the two distinct roots of , that is, and . So, and .
From (2.12), we have
Moran (1951) and Moran (1953) used the inter-event time to estimate the parameters in evolutive processes. Doubleday (1973) used similar technique to obtain the maximum likelihood estimation (MLE) of the parameters in multiple birth-death process. Here, we use the same method to obtain the MLE of the parameter in GLBDP.
Let be the total number of transitions made by upto some fixed time . Suppose are epochs when these transitions have occurred. We define
where denote the inter-event times.
Note that ’s are independent and exponentially distributed with parameter , .
The likelihood function is given by
(2.18)
On taking the derivative of log-likelihood function with respect to , we get
(2.19)
On equating (2.19) to zero, we get the MLE of as follows:
Note that follows distribution with two degrees of freedom. So,
has distribution with degrees of freedom. Thus,
Hence,
is an unbiased estimator of whose distribution is known. From (2.18), it follows by using the Fisher factorization theorem that
is a sufficient statistics for . Indeed, it is a minimal sufficient statistics for .
2.2. GBDP with constant birth and death rates
Here, we obtain the explicit form of the state probabilities of GBDP in the case of constant birth and death rates, that is, for all and for all . In this case, we denote the process by .
From (2.2), the state probabilities solve the following system of differential equations:
(2.20)
with initial conditions and for all .
Remark 2.10.
If there is no progenitor at and , for all , and then the GBDP reduces to the generalized counting process (GCP) (see Crescenzo et. al. (2016)).
Remark 2.11.
The pgf is the solution of the following differential equation:
with . It is given by
(2.21)
Theorem 2.2.
The state probabilities of the process are given by
On rearranging the terms and extracting the coefficients of in (2.22), we get the required result.
∎
Theorem 2.3.
For , the mean and the variance of are given by
respectively.
Proof.
On taking the derivatives with respect to on both sides of (2.21), we get
and
So,
and
This completes the proof.
∎
3. Cumulative births and deaths in GLBDP
Let denotes the total number of individuals born by time .
Proposition 3.1.
The joint pmf
solves the following system of differential equations:
(3.1)
with initial conditions
(3.2)
where for all or .
Proof.
In an infinitesimal time
interval of length such that as , we have
So,
Equivalently,
On letting , we get the required result.
∎
Proposition 3.2.
The pgf , ,
solves
(3.3)
with
Proof.
Using (3.2), we get . On multiplying with on both sides of (3.1) and by adjusting the terms, we get
On summing over and , we get the required result.
∎
Let and . On taking and in (3.3), we get the cumulant generating function (cgf) as a solution of the following differential equation:
(3.4)
with
In (3.4), we use the following expanded form of the cgf (see Kendall (1948), Eq. (35)):
(3.5)
to obtain
(3.6)
Proposition 3.3.
For , we have
(i)
(ii)
(iii)
(iv)
(v)
where , and .
Proof.
On comparing the coefficients on the both sides of the (3.6), we get
and
On solving the above differential equations with initial conditions , , , and , respectively, we get the required results.
∎
On using (ii), (iii) and (v) of Proposition 3.3, we can obtain the correlation coefficient between and as follows:
Remark 3.1.
The mean and variance of GLBDP obtained in Proposition 3.2 coincide with (2.15). From the mean of and , we get the following limiting results:
and
respectively. Thus, in the long run, if then population is expected to grow beyond any bound, for the population is expected to grow up to some finite number then it is expected go extinct, and for it is expected that infinitely many people will be born however all of them will die out except one.
In the case of , some numerical examples of cumulative births are given in Figure 1.
Figure 1. Cumulative births in GLBDP for at .
For different values of , the variation of correlation coefficient with respect to is shown in Figure 2. It can be observed that if then correlation is high for the larger value of and for significantly large value of , we have perfect positive correlation between and . For , decreases with time and there is no linear correlation between and for the very large value of .
Figure 2. Correlation between and for
Let denotes the total number of deaths by time .
Proposition 3.4.
The joint pmf
is the solution of the following system of differential equations:
(3.7)
with initial conditions and for all and ,
where for all or .
Proof.
In an infinitesimal interval of length such that as , we have
So,
After rearranging the terms and on letting , we get the required result.
∎
The proof of the next result is along the similar line to that of Proposition 3.2, thus it is omitted.
On comparing the coefficients on the both side of the (3), we get
and
On solving these differential equations with initial conditions , and , respectively, we get the following result.
Proposition 3.6.
For , we have
(i)
(ii)
(iii)
Here, again using the results of Proposition 3.2 and Proposition 3.6, we can calculate the correlation coefficient between and . For , some numerical examples of cumulative deaths are given in Figure 3.
Figure 3. Cumulative deaths in GLBDP for at time .
From Figure 4, we can observe that for , as increases the correlation coefficient changes from negative to positive and it is strong for large values of . For there is no correlation between and .
Figure 4. Correlation between and for
Proposition 3.7.
The joint pmf is the solution of the following system of differential equations:
(3.10)
with initial conditions and for all , and ,
where for or or .
Proof.
Let be the length of an infinitesimal interval such that as . Then,
So,
After rearranging the terms and on letting , we get the required result.
∎
The pgf , , , of
satisfies the following differential equation:
with initial condition
As , , we have
So, the covariance of and , is
which can further be used to calculate the correlation coefficient .
Next, we do the similar study for , that is, the GBDP with constant birth and death rates.
3.1. GBDP with constant birth and death rates
Let and be the total number of births and deaths up to time in the process , respectively. Similar to the result of Proposition 3.7, the joint pmf solves the following system of differential equations:
with initial conditions and for all , and .
So, the pgf , , , is the solution of the following differential equation:
From (3.12), we obtain the following marginal pmfs:
and
where
and
Remark 3.4.
Note that the joint pmf of is the product of their marginal pmfs. Hence, and are two independent random processes.
Proposition 3.8.
For , we have
(i) ,
(ii) ,
(iii) ,
(iv) .
Proof.
On taking derivatives of (3.11) with respect to and , we get
and
So,
and
This completes the proof.
∎
Proposition 3.9.
The variance-covariance matrix of is given by
for all .
Proof.
On taking derivatives of (3.11) with respect to and , we get
So,
and
This completes the proof.
∎
4. Stochastic integral of GBDP
Puri (1966) and Puri (1968) studied the joint distribution of linear birth-death process and its integral. McNeil (1970) obtained the distribution of the integral functional of BDP. Moreover, Gani and McNeil (1971) studied the joint distributions of random variables and their integrals for certain birth-death
and diffusion processes.
Doubleday (1973) has done similar study for the linear birth-death process with multiple births.
In GBDP, let , that is, there are individuals present in a population at time . The hitting time of to state given that is defined as
(4.1)
Let
Suppose that there is no possibility of immigration, that is, for all . Then,
Let us consider an infinitesimal time interval of length . Then, we have
which on rearranging the terms and letting reduces to
(4.2)
Let
(4.3)
where is a non-negative real valued function on the state-space of GBDP.
Observe that if then and if then is the area under up to time of first extinction of the process given that it start from state .
Now, let us define
Recall that denotes the total time spent by the process in state before the first transition takes place given that it start from state , and let denotes the event that the first transition is many births and be the event that the first transition is many deaths given that we start from .
Then, we have
where we used strong Markov property to get the last two steps. From the Markovian property of GBDP, we have
and
where . On using Remark 2.2, we get
Hence,
(4.4)
with
and
Here,
and
As McNeil (1970) pointed out that Eq. (4.4) correspond to finding the Laplace transform of (4.2) with parameters and in place of and , respectively, that is, on taking the Laplace transform of (4.2), we get
(4.5)
where
with .
Hence, the Eq. (4.4) is nothing but the backward equation for GBDP with scaled parameters and and the distribution of is known whenever the distribution of is known.
with , which coincide with result obtained in McNeil (1970).
Remark 4.2.
In the cases of GLBDP, that is, and , (4.4) reduces to
where
and
4.1. Stochastic path integral of GBDP
Let us consider the stochastic path integral of GBDP, where is a non-negative real valued function. Then, conditional on the event , the joint distribution function , of and solves
(4.6)
where for all . This follows from the transitions probabilities of GBDP and its Markov property.
Remark 4.3.
Let be the total time in during which the population size is . Then, for , the stochastic path integral of GBDP can be written as
Next, we consider the stochastic path integral of GLBDP.
4.1.1. A linear case of GBDP
Here, we obtain some results related to the stochastic path integral of GLBDP.
Let be the stochastic path integral of GLBDP defined as
From (4.6), the system of differential equations that governs the joint distribution , of and is given by
(4.7)
Thus, their joint pgf , , solves
with initial condition . Hence, the cgf
solves
(4.8)
with
Next, we obtain the mean and variance of the stochastic path integral of GLBDP and its covariance with .
On comparing the coefficients on both sides of (4.9), we get
and
On solving the above differential equations with initial conditions , and , respectively, we get the required results.
∎
Remark 4.4.
The limiting behavior of the mean of is given as follows:
The correlation coefficient for different values of parameter are illustrated in Figure 5.
Figure 5. Values of stochastic path integral of GLBDP at .
The variation of correlation coefficient between and its stochastic path integral with time is shown in
Figure 6. For , and have strong positive correlation and as increases it converges to . For , the correlation is positive but it is getting weaker with time.
Figure 6. Correlation plot of and for .
4.2. Stochastic path integral of GBDP in the case of constant birth and death rates
Let be the stochastic path integral of the process defined in Section 2.2. From (4.6), the joint distribution solves
(4.10)
with
,
where for all .
The pgf , of solves the following differential equation:
(4.11)
with initial condition . And, its cgf solves
(4.12)
with On following the similar lines as in the proof of Proposition 4.1, we get
and
Next, we solve differential equation (4.11) to obtain the joint pgf of and .
The subsidiary equation corresponding to (4.11) is as follows:
where is a real valued function. By
using the initial condition , we obtain
Thus,
5. Immigration effect in GLBDP
In GLBDP, the state is the absorbing state of the process, that is, once the population get extinct it can not be revive again. Here, we consider a possibility that the process can revive again once it reaches state . To capture the immigration effect in GLBDP, we introduce a linear version of GBDP, namely, the generalized linear birth-death process with immigration (GLBDPwI).
Let be the rate of population growth due to immigration. Here, we consider two different cases of immigration as follows:
5.1. Immigration effect at state only
In this case, the immigration happens only when no alive individual is present in the population. So, the immigration rate is , and once the immigration happens, the birth and death rates are , and , , respectively, for all . From (2.2), the state probabilities , of GLBDPwI solve the following system of differential equations:
and
with and for all . Here, for all . Its pgf solves
(5.1)
with .
On taking the derivative of (5.1) with respect to , we get
(5.2)
On taking in (5.2), we get the following differential equation that governs the mean of GLBDPwI:
with , where Thus,
5.2. Immigration effect at any state
In this case, the immigration effect is always present in the population at a constant rate. So, the birth and death rates are , and , , respectively, for all . From (2.2), the state probabilities of GLBDPwI solve
where and for all . So, the differential equation that governs the pgf of GLBDPwI is given by
(5.3)
with .
On taking the derivative with respect to on both sides of (5.3), we have
(5.4)
On taking in (5.4), we get the mean of GLBDPwI as a solution of the following differential equation:
with initial condition . It is given by
where .
Remark 5.1.
For , the mean of GLBDPwI reduces to the mean of GLBDP given in (2.15).
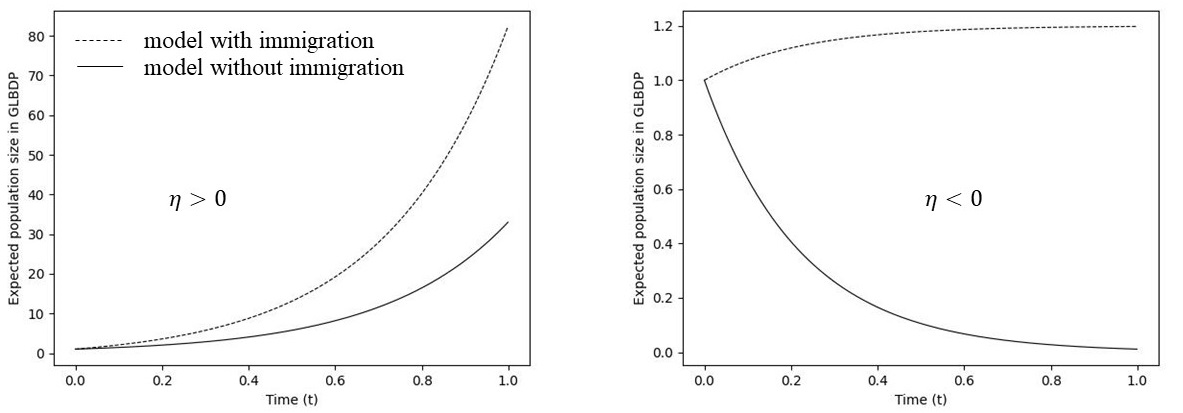
For different values of the variation of expected values of GLBDP and GLBDPwI with time is shown in Figure 7.
Figure 7. Expected population size in GLBDP and GLBDPwI for .
In GLBDPwI, for , the population size grow exponentially fast for the large value of and for , the limiting mean value for large is , that is,
Thus, as expected in GLBDPwI, the population will never go extinct.
Remark 5.2.
On comparing (2.6) and (5.3), we note that they differs in the term . It is a generalized counting process component with constant transition rates. Suppose that the birth rates in GLBDPwI tend to zero, that is, for all then it can be used to study the fluctuation in the number of particles enclosed inside very small volume. Here, the immigration of particle from surrounding happens as GCP with constant rates and the emigration of finitely many particles from closed volume is considered as death whose rates are linearly proportional to the number of particle present.
6. Application to vehicles parking management system
Suppose a vehicles parking lot has maximum capacity of parking spots. If we assume that the gate of the parking area is wide enough such that multiple vehicles can arrive or depart together and the chance of simultaneous arrival and departure of the vehicles is negligible. Let denotes the total number of vehicles parked at time . Then, we can use a linear version of GBDP to model this problem, where is a GBDP with parameters
for all , and .
Thus, the rates of arrival and departure of vehicles are proportional to the number of vacant spots and the total number of vehicles parked in the parking lot, respectively. Let and denote the number of vehicles arrived and departed by time .
Here, we are interested in knowing the quantities , and . Let us assume that there are no vehicles parked at time . As obtained in the case of GLBDP, it can be shown that the pmf solves the following system of differential equations:
with initial condition .
Here, for all and .
Hence, the governing system of differential equation for its mean is given by
Similarly, the joint pmf is the solution of following system of differential equations:
Hence, the cgf solves
with . Thus, we get
Let us consider the stochastic path integral . Then, we can find the average occupancy of the parking lot at any given time which we defined as .
From (4.6), the system of differential equations that governs the joint distribution is given by
where for all and .
So, the joint cgf solves
(6.2)
with .
On using (3.5), we get the following differential equation:
with . Hence,
Thus, average occupancy is
References
[1]
Bailey, N.T.J., 1964. The Elements of Stochastic Processes with Applications to the Natural Sciences. Wiley, New York.
[2]
Doubleday, W.G., 1973. On linear birth-death processes with multiple births. Math Biosci.17, 43-56.
[3]
Di Crescenzo, A., Martinucci, B. and Meoli, A. 2016. A fractional counting process and its connection
with the Poisson process. ALEA Lat. Am. J. Probab. Math. Stat. 13(1), 291-307.
[4]
Feller, W., 1968. An Introduction to Probability Theory and Its Applications, Vol. 1, 3rd ed. Wiley, New
York.
[5]
Gani, J., McNeil, D.R., 1971. Joint distributions of random variables and their integrals for certain birth-death and diffusion processes. Advances Appl. Prob. 3, 339-352.
[6]
Kendall, D.G., 1948. On the Generalized ”Birth-and-Death” Process. Ann. Math. Statist.19(1), 1-15.
[7]
Karlin, S., Taylor, H.M., 1975. A first course in stochastic processes. Academic Press.
[8]
Moran, P.A.P, (1951). Estimation methods for evolutive processes. J. R. Statist. Soc. (B)13, 141-146.
[9]
Moran, P.A.P, (1953). Estimation of parameters of a birth and death process. J. R. Statist. Soc. (B)15, 241-245.
[10]
McNeil, D.R., 1970. Integral functions of birth and death processes and related limiting
distributions. Ann. Math. Stat.41, 480-485.
[11]
Puri, P.S., 1966. On the homogeneous birth and death process and its integral. Biometrika. 53, 61-67.
[12]
Puri, P.S., 1968. Some further results on the birth-and-death process and its integral.
Proc. Camb. Phil. Sot.67, 141-154.