On the exact self-similar finite-time blowup
of the Hou–Luo model with smooth profiles
Abstract.
We show that the 1D Hou–Luo model on the real line admits exact self-similar finite-time blowup solutions with smooth self-similar profiles. The existence of these profiles is established via a fixed-point method that is purely analytic. We also prove that the profiles satisfy some monotonicity and convexity properties that were unknown before, and we give rigorous estimates on the algebraic decay rates of the profiles in the far field. Our result supplements the previous computer-assisted proof of self-similar finite-time blowup for the Hou–Luo model with finer characterizations of the profiles.
School of Mathematical Sciences, Peking University
1. Introduction
We consider the 1D Hou–Luo (HL) model
| (1.1) |
for , where denotes the Hilbert transform on the real line. This model was first proposed by Luo and Hou [10, 11] to acquire understanding of the numerically observed self-similar singularity formation of the 3D axisymmetric Euler equations on the solid boundary of an infinitely long cylinder. It also models the boundary induced singularity formation of the 2D Boussinesq equations [11, 3] in the half-space ,
| (1.2) |
for the 2D Boussinesq equations behave similarly to the 3D axisymmetric Euler equations away from the symmetry axis; see e.g. [13]. In fact, the boundary finite-time blowup of 3D axisymmetric Euler equations can be approximated by the boundary finite-time blowup of the 2D Boussinesq equations up to an asymptotically small perturbation [11, 1].
Ever since the report of convincing numerical evidence of a self-similar finite-time blowup of the 3D axisymmetric Euler equations with boundary, namely the Hou–Luo scenario [10], vast amounts of effort have been made to try to rigorously prove the existence of such boundary singularity for the 3D Euler/2D Boussinesq equations as well as a number of simplified models including the HL model (1.1). We recommend the survey paper [7] for a comprehensive literature review. We only list some of the most relevant ones here. Shortly after the original work of Luo and Hou [11], Choi et al. [4] used a functional argument to prove the finite-time blowup of the HL model (1.1) and another 1D model known as the CKY model [5]. However, their approach was not able to capture the self-similar nature of the blowup. Years later, Chen, Hou, and Huang [3] developed a novel analysis framework based on rigorous computer-assisted proofs to establish asymptotically self-similar finite-time blowup of the HL model from smooth initial data. In particular, they constructed an approximate self-similar profile using numerical computation, and then they showed by an energy argument that any solution of the HL model that is initially close to the approximate self-similar profile (up to proper rescaling) will develop finite-time singularity in an asymptotically self-similar way. Recently, Chen and Hou [1] generalized this powerful computer-assisted approach to the higher dimension and used it to prove the asymptotically self-similar finite-time blowup of the 2D Boussinesq/3D Euler equations with boundary, thus finally settling the conjecture on the Hou–Luo scenario. Remarkably, their work showed for the first time that the 3D Euler equations can develop finite-time singularity from smooth initial data, though the presence of a solid boundary is critically necessary in this scenario. Whether this can happen in the free space still remains open.
As mentioned above, the asymptotically self-similar finite-time blowups of the 2D Boussinesq equations (1.2) and the 1D HL model (1.1) were both established via a computer-assisted approach. On the one hand, computer-assisted analysis can yield much sharper or tighter estimates far beyond the reach of pure analysis, which is critical in the proofs of these blowups. On the other hand, this novel proof framework relies heavily on computer assistance, which can be quite difficult to digest and to reproduce for most of the readers. Furthermore, though the existence of an exact self-similar solution (close to the approximate one constructed numerically) is also implied by the computer-assisted approach, characterizations of the solution profiles are very limited. For example, the computer-assisted proof did not tell whether the exact self-similar profiles for the 2D Boussinesq equations or the 1D HL model are smooth. Therefore, it would be helpful to develop pure analytic strategies to prove the existence of exact self-similar finite-time blowups and to provide finer characterizations of the corresponding self-similar profiles.
In this paper, we focus on the 1D HL model (1.1). More specifically, we look for exact self-similar solutions of (1.1) that take the form
| (1.3) |
where are the self-similar profiles, are the scaling factors, and is the finite blowup time. This particular self-similar ansatz is due to the natural scaling property of equations (1.1). Plugging this ansatz into (1.1) and balancing the equations as yields and . As we will see, the undetermined value is related to the far-field decay rates of and .
In contrast to an exact self-similar solution, an asymptotically self-similar finite-time blowup refers to a solution that exhibits clear self-similarity only as approaches the finite blowup time :
| (1.4) |
where the profiles and the scaling factors all depend on time and will converge to some non-trivial steady state as . In particular, must converge to . In their computer-assisted framework, Chen, Hou, and Huang [3] proved the existence of a family of asymptotically self-similar finite-time blowups of the form (1.4) by showing the nonlinear quasi-stability of the corresponding dynamic rescaling equations around an approximate steady state constructed by numerical methods. The term “a family of” means that the initial state of (1.4) can be taken arbitrarily as long as it falls in a small energy-norm ball centered at the approximate steady state (up to rescaling). Furthermore, they also used a limit argument to show that, near the approximate steady state, there lies a true stable steady state that corresponds to exact self-similar profiles, though they could not provide accurate descriptions of these profiles. Nevertheless, their result gives a very accurate estimate of the spacial scaling: , where is a numerically computed constant corresponding to the approximate steady state, and the bound results from computer-assisted estimates. It is interesting that is extremely close to but strictly smaller than .
As supplementary to the existing results obtained via computer-assisted proofs, we prove the existence of an exact self-similar finite-time blowup of the form (1.3) for the HL model (1.1) in an alternative way that is pure analytic, and we provide more detailed characterizations of the self-similar profiles.
Theorem 1.1.
The 1D Hou–Luo model (1.1) on the real line admits an exact self-similar finite-time blowup solution of the form (1.3) with , , , and a pair of profiles that satisfy the following:
-
(1)
is odd in , and is even in .
-
(2)
The functions and are both decreasing in and convex in on ; that is, and for all .
-
(3)
and are both infinitely smooth on . Moreover, for any and any , and for any and any .
-
(4)
Both the limits and exist and are positive and finite.
Let us remark on our result. The existence of the exact self-similar profiles is proved via a nonlinear fixed-point method. More precisely, we first construct two nonlinear nonlocal maps and over a suitable function such that, if is a fixed point of , i.e. , then and are a pair of exact self-similar profiles of the HL model (1.1) with given explicitly in terms of integrals of . We then prove the existence of a fixed point of using the Schauder fixed-point theorem. A key observation in our proof is that the map preserves the properties that is non-increasing in and convex in for , which will be frequently used in our arguments. Furthermore, based on the fixed-point relation , we are able to determine the regularity of and their far-field decay rates, which then transfer to desired properties of the corresponding self-similar profiles and .
This proof strategy is modified from the fixed-point method developed in a recent work by the same authors [9], where we proved the existence of exact self-similar finite-time blowups of the a-parameterized family of the generalized Constantin–Lax–Majda (gCLM) equation [8, 6, 14],
for all . This equation is also a 1D model for the vorticity formulation of the 3D incompressible Euler equations, with a parameter that controls the competition between advection and vortex stretching. The main difficulty of modifying our fixed-point method from the gCLM case to the HL case lies in that the gCLM model is an equation of one scalar , while the HL model is a coupled system of two scalars . Surprisingly, though the nonlinear map for the HL system is formally much more complicated than the one for the gCLM equation, it still enjoys the critical property that it preserves the previously mentioned monotonicity and convexity of . From a more essential perspective, this nice property of owes to the kernel structure of the Hilbert transform . However, we believe that this fixed-point framework can be further generalized to prove the existence of an exact self-similar finite-time blowup of the 2D Boussinesq equations. This shall be our next step in this line of research.
One unsatisfying thing about our result is the crude estimate of . Based on our fixed-point method, we can only show that , where . This is of course much worse than the estimate obtained in [3]. From this comparison, one sees clearly how rigorous computer-assisted estimates can outperform pure analytic estimates in providing sharp bounds.
Finally, we remark that our work does not prove the uniqueness (up to rescaling) of self-similar profiles for the HL model (1.1). Hence, we cannot conclude that the self-similar profiles obtained by our fixed-point method are identical (under proper rescaling) to those obtained via the computer-assisted proof. Nevertheless, it is likely that the exact self-similar solution is unique provided that and . In fact, we can numerically compute the fixed point by an iterative scheme and compare it to the one obtained numerically in [3] by solving the dynamic rescaling equation, and we see that they match perfectly well up to only scheme errors.
The remainder of this paper is organized as follows. In Section 2, we derive equations for the self-similar profiles and then transform them into an equivalent fixed-point formulation. Section 3 is devoted to proving the existence of exact self-similar profiles via a fixed-point method, and Section 4 is devoted to the establishment of the claimed properties. Finally, we perform some numerical simulations in Section 5 based on the fixed-point method to verify and visualize our theoretical results.
2. Equations for the self-similar profiles
Assuming that (1.3) is an exact self-similar solution of the HL model (1.1), we first derive a nonlocal ordinary differential system for the self-similar profiles and the scaling factors . Under some natural regularity conditions on and , we perform a change of variables and then transform the self-similar equations into a fixed-point formulation in the new variables.
2.1. Self-similar profiles
Substituting the self-similar ansatz (1.3) into the equation (1.1) yields
where . Balancing the above equations as yields , , and a system for the self-similar profiles:
From now on, for notation simplicity, we will still use for , respectively. Moreover, it is more convenient to work with the variable instead of . We thus obtain our main equations:
| (2.1) |
We have substituted , and we will always do so in what follows. The expressions of and in terms of are, respectively,
| (2.2) |
Here, is the Hilbert transform on the real line with denoting the Cauchy principal value.
It is worth mentioning that Chen, Hou, and Huang [3] studied the dynamic rescaling equations of the HL model (see [3, Equation (2.1)]),
| (2.3) |
which is in fact equivalent to the original HL model (1.1) under some time-dependent change of variables. They needed to choose how depend on the solution (see (2.5) below) in order to capture the intrinsic blowup scaling. In this way, they reformulated the finite-time blowup problem into a stability problem. With the help of a numerically constructed approximate steady state, they showed that the solution of (2.3) converges to some true steady state near the approximate one, which then implies the self-similar finite-time blowup of the original HL model.
Different from their dynamic approach, our strategy is to directly find a nontrivial solution of equations , which is then an exact steady state of the dynamic rescaling equations (2.3). One important fact is that, if is a solution of (2.1), then
| (2.4) |
is also a solution of (2.1) for any . Owing to this scaling property, we can release the restriction that . In fact, it is the ratio that matters. Moreover, in consistence with the previous computer-assisted work [3], we look for solutions to the profile equations (2.1) that satisfy the following assumptions:
-
•
Odd symmetry: and are both odd functions of . As a consequence, is also odd in .
-
•
Non-degeneracy: and .
-
•
Out-pushing condition: for all .
These conditions are all satisfied by the approximate steady state constructed in [3], and they are actually critical to the stability argument there. The non-degeneracy condition not only ensures the solution is not trivial, but also determines how the scaling factors are related to the profiles:
| (2.5) |
To derive these relations, one simply evaluates the derivatives of the first two equations in (2.1) at and uses the non-degeneracy condition and the odd symmetry. Conversely, imposing the relations (2.5) on the dynamic rescaling equations (2.3), as implemented in [3], ensures that and are conserved quantities over time, i.e. , , which is essentially the source of stability. The odd symmetry, which is preserved by the dynamic rescaling equations, then ensures that the origin is a stable stagnation point that “generates” stability. Finally, the out-pushing condition implies that the velocity has the same sign as , and thus it transports the stability from the origin towards the far-field.
2.2. Reformulation of the problem
Now, we move on to transforming equations (2.1) into a fixed-point formulation. In view of (2.4), we may assume that , in which case . This uses one degree of freedom in the scaling property (2.4). Since are assumed to be odd functions of , we consider the change of variables:
| (2.6) |
Note that , and that the out-pushing condition implies for all . Moreover, we define
| (2.7) |
Substituting these changes of variables into (2.1) yields
| (2.8) |
From the second equation of (2.8), we easily get
meaning that can be explicitly determined by and hence by . Next, we rearrange the first equation of (2.8) to get
Multiplying both sides of this equation by yields
which leads to
Remember that, besides the normalization condition , we still have one degree of freedom in the scaling property (2.4) at our disposal. Later, we will use it to determine the value of in (2.7) as a particular functional of :
In summary, we have obtained the following fixed-point formulation of (2.1):
| (2.9) |
From the derivation above, it is apparent that a solution of the integral equations (2.9) corresponds to a solution of our main equations (2.1) via the change of variables (2.6), (2.7).
3. Existence of solution by a fixed-point method
Our goal of this section is to show that the nonlinear integral equations (2.9) admit a non-trivial solution. As we can see, the system (2.9) naturally defines a fixed-point problem of a nonlinear nonlocal map. To prove the existence of a suitable fixed-point solution, we need to construct some appropriate function set in a Banach function space on which we can establish continuity and compactness of this nonlinear map, and then we use the Schauder fixed-point theorem.
3.1. A fixed-point problem
Consider a Banach space of continuous even functions,
endowed with a weighted -norm , referred to as the -norm, where for some to be defined below. In this topology, we introduce a nonempty, closed, and convex subset of , in which we will prove the existence of a fixed point:
Here and below, and denote the left and the right derivatives of , respectively. For reasons that will become clear later, we set , , and
| (3.1) |
with
Moreover, is an absolute constant that will be determined implicitly by and in Lemma 3.15, and is also an absolute constant that will be determined explicitly by the function in Corollary 3.16. Once is determined, we choose so that is closed and bounded in the -norm with . It is also apparent that is a convex set. Later, we will argue that is nonempty. In fact, the function defined above belongs to by our choice of the constants.
One can check that implies
| (3.2) |
The lower bound above owes to the fact that . Indeed, we have
| (3.3) |
The upper bound of in (3.2) follows from the assumptions that is convex in , , and is non-increasing on .
We remark that, though a function is not required to be differentiable, the one-sided derivatives and are both well defined at every point by the convexity of in . In what follows, we will abuse notation and simply use for and in both weak sense and strong sense. For example, when we write , we mean and at the same time. In this context, the non-increasing property of on can be represented as for .
Now, we formally construct our nonlinear map in a few steps, guided by the fixed-point problem (2.9). We first define a linear map
Comparing this definition with (2.2), one finds that
| (3.4) |
where
| (3.5) |
Moreover, it is not hard to check that, for ,
| (3.6) |
Corresponding to the second line of (2.9), we define
where we set
| (3.7) |
As mentioned above, this is using the second degree of freedom in the scaling property (2.4) to determine the value of in (2.7) in terms of . It will be clear in the proof of Corollary 3.6 below that we choose to define in this way so that . Note that must be strictly positive and finite for any . Next, in view of the third line of (2.9), we define
Finally, letting
| (3.8) |
we define
The rest of this paper aims to study the fixed-point problem
The following proposition explains how a fixed-point of relates to a solution of (2.1).
Proposition 3.1.
Proof.
Denote , , , , , and . The first statement follows directly from the construction of these maps. Moreover, it is straightforward to compute that
| (3.10) |
Hence, if , then is a solution of the equations (2.8). The second statement then follows from the change of variables (2.6), (2.7) and the relations in (2.5). ∎
We now explain the design of the set . The guiding idea is to make as specific as possible while keeping it compact in the -norm and closed under the map , so that we can apply the Schauder fixed-point theorem. The compactness of is relatively easy, while its closedness under takes most of the work. Firstly, the monotonicity in and the convexity in , which provide powerful controls on the functions in , are magically preserved by the map . This is essentially due to the nice properties of the kernel of the linear map . Secondly, the monotonicity, the convexity, and some calculations of will lead to the control . Hence, we can impose this condition on as well. Thirdly, we need in order for to be well defined on , which explains the condition . However, to make sure this tail bound is not compromised by , we need the weaker estimate , and to further pass this weaker estimate to we need to use the condition . Also, leads to the upper bound in (3.2), which further implies , so that and are both well-defined. Finally, the estimate can be derived from and the convexity of in , therefore closing the loop.
The remainder of this section is devoted to justifying the above arguments and to proving the existence of a fixed point of in .
3.2. Estimates of and
Recall the functionals , , defined in (3.5), (3.7), (3.8), respectively, which will be constantly used throughout this paper. We start with some estimates on and that will be used frequently in what follows.
Lemma 3.2.
For any ,
and
As a consequence,
Proof.
By the definition of and , it is easy to see that and for . Since , we have
In particular, by the definition of , the inequality above is strict when is sufficiently large. It then follows that
and
This proves the lemma. ∎
The next lemma provides an -dependent bound for that will later be used in the proof of the estimate .
Lemma 3.3.
For any and any ,
Proof.
Fix an . For , , so . For , the convexity of in implies that , and so . Combining these estimates yields
We thus obtain that
which is the desired bound. ∎
We will need the continuity of and for proving the continuity of in the -norm.
Lemma 3.4.
are all continuous in the -norm. In particular,
and
for any .
Proof.
Recall that . Denote . Since , , we have
Then,
and
The continuity of then follows from the continuity of and Lemma 3.2. ∎
3.3. Monotonicity and convexity
Next, we derive the key property of , that it preserves the monotonicity in and convexity in on for functions in . This nice property of essentially arises from a kernel analysis of the linear map as shown in the following lemma, which is a restatement of its counterpart in [9]. We still provide the proof here for the sake of completeness.
Lemma 3.5.
Given , on , and is convex in .
Proof.
We first show that on . We can use integration by parts to compute that, for ,
| (3.11) |
where the function is defined in (A.1) in Appendix A.1, and the integration by parts can be justified by the properties of proved in Lemma A.1. Therefore, we have
| (3.12) |
where the inequality follows from property (3) in Lemma A.1.
Next, we show that is convex in . By approximation theory, we may assume that is twice differentiable in , so that the convexity of in is equivalent to for . Continuing the calculations above, we have
where the function is defined in (A.2) in Appendix A.2, and the integration by parts can be justified by the properties of proved in Lemma A.2. Therefore,
where the last inequality follows from property (3) in Lemma A.2. This implies the convexity of in . ∎
A similar property holds for the map as it is just plus a negative multiple of . This then leads to a crude but useful universal estimate of for .
Corollary 3.6.
For any , on , and is concave in . As a consequence, for all .
Proof.
Write . The monotonicity of and the concavity of follow directly from Lemma 3.5. More precisely, we have and for all . By monotonicity we immediately have that
We have used (3.6) for the limit value .
Next, we show that for all . In fact, we can compute that
Then, by the concavity of in , we have for ,
which is the desired bound. ∎
The above properties of imply similar properties of through some straightforward derivative calculations.
Corollary 3.7.
For any , on , and is convex in .
Proof.
To prove is convex in , we only need to show that for . Note that the concavity of in implies that, for ,
which further implies
Therefore, for , we can compute
as desired. ∎
Finally, we show that the map also enjoys the same monotone and convex properties.
Corollary 3.8.
For any , on , and is convex in . Moreover, for all .
Proof.
Let . For , define
| (3.13) |
so that . Note that , , and
We can compute that
and thus
Note that, by Corollaries 3.6 and 3.7, the function is non-increasing in . Hence,
that is,
We then find that, for ,
For the record, we also compute that
| (3.14) |
From this we find that .
Next, we show that is convex in . To this end, we first show that is non-increasing in in an analogous way. Define
| (3.15) |
Consider the function
We find that for ,
and
These calculations imply since . It follows that
From the above we also find that
By the concavity of in (Corollary 3.6), and are both non-increasing in . Moreover, the function is also non-increasing in . Hence, is non-increasing in . This again implies that , and thus, for ,
Now, we can compute that
We have also used Corollary 3.6 for the last inequality. This completes the proof. ∎
We proceed to show that preserves the uniform lower bound appearing in the definition of the set . To this end, we first prove a finer uniform estimate for for all that strictly improves the bound (in Corollary 3.6) for sufficiently large .
Lemma 3.9.
For any and for all ,
where
Proof.
Comparing the definition of and that of , we immediately have the following.
Corollary 3.10.
For any ,
Proof.
Next, for the particular value of chosen in the definition of , we will show that for , which means the property is preserved by . To achieve this, we need the following lemma.
Lemma 3.11.
For any , . As a consequence, .
Proof.
Write . We first upper bound in two ways using some estimates in [9] (more precisely, in the proof of [9, Lemma 3.6]). We restate the detailed calculations below for the reader’s convenience. On the one hand, we can use the calculations in the proof of Lemma 3.5 to get that, for ,
We have used the fact that (Lemma A.2). Recall that the special functions and are defined in Appendixes A.1 and A.2, respectively. On the other hand, for any , we use for to find that
We then choose to obtain
| (3.16) |
Combining the two bounds above, we reach
It follows that, for ,
We have used the -dependent upper bound of in Lemma 3.3. Plugging in and using , we get
We then use the concavity of in to obtain
That is, . ∎
The above lemma will also be needed when we establish uniform decay bounds for in the next subsection. For now, we use Lemma 3.11 to derive the following.
Corollary 3.12.
For any , .
3.4. Decay estimates
In this subsection, we show that the map preserves the uniform decay bounds for , i.e. and . These estimates will be established in a general framework as presented in the following lemma.
Lemma 3.13.
Given , if for some and some , then for all ,
and
Proof.
Let , , , and . Bear in mind that is non-decreasing on , and . Define
For , , and thus
This implies that, for ,
We have used that . Note that for we also have
Moreover, this implies
To apply Lemma 3.13, we need to establish for some . In fact, we have already obtained this type of condition in Lemma 3.11, which leads to the first uniform decay bound for .
Corollary 3.14.
For any and for all ,
and
where .
Proof.
Next, we use the condition to compute a new pair of for the assumption of Lemma 3.13, so that we can derive a stronger decay bound for .
Lemma 3.15.
There is some absolute constant (that is implicitly determined by and ) such that, for all ,
Proof.
For , define
| (3.17) |
It is not hard to show that there is some such that , for , and for . Also note that
where is defined in (A.1), and the limits above are given in Lemma A.1.
We then find that, for ,
The first inequality above owes to the non-increasing property of on , and the second inequality follows from . Note that for ,
Hence, we can use the dominated convergence theorem to obtain
Recall by Lemma 3.2. The above limit implies that, there exist some such that
and hence,
The lemma is thus proved. ∎
We then derive a stronger uniform decay bound for by again applying Lemma 3.13.
Corollary 3.16.
For any and for all ,
and
where
Proof.
At this point, we are ready to conclude that the set is nonempty and is closed under .
Theorem 3.17.
is nonempty, and maps into itself.
Proof.
The claim that maps into itself follows from Corollaries 3.8, 3.14, 3.16, 3.10, and 3.12. In order to prove is nonempty, it suffices to show that . Recall the definition (3.1) of . Firstly, it is nor hard to check that the function satisfies is non-decreasing on and is concave in , which implies is non-increasing on and is convex in (by a similar argument as in the proof of Corollary 3.7). Secondly, a direct derivative calculation shows that (for that is very small). Thirdly, through the proofs of preceding lemmas and corollaries, it is straightforward to check that . The above together imply that , and the theorem is thus proved. ∎
3.5. Continuity
In order to apply the Schauder fixed-point theorem, we also need the continuity of on in the topology. This will rely on the continuity of and Lemma 3.4.
Theorem 3.18.
is continuous with respect to the -norm.
Proof.
Recall that with . Let be arbitrary, and write , , , , , , , . Suppose that is sufficiently small. We will show that , where the symbol “” only hides a constant that does not depend on .
For any , we have
where is defined as in (3.17). It is not hard to show that there is some such that , for , and for . Also note that . We then decompose and estimate the last integral of above as
We then obtain
A similar argument shows that . Combining these estimates with Lemma 3.2 and Lemma 3.4 yields
| (3.18) |
It then follows that, for any ,
Write
Using Corollary 3.16, we find
We have used the fact . This also implies
| (3.19) |
Next, we use (3.14) to obtain
Let . We can rearrange the display above to obtain
We multiply both sides of the equation above by to obtain
Since and , we have for . It then follows that, for ,
We have used for the last inequality above. Note that the derivative is legit in weak sense. We have now reached
where
It follows that
which leads to
We then need to estimate . Note that, by Corollaries 3.16 and 3.10,
Using this, Lemma 3.2, Lemma 3.4, Corollary 3.16, and the preceding estimates (3.18) and (3.19), we can bound as
Moreover, since , , and thus
Finally, we have
That is, for all ,
Therefore, This proves the continuity of in the -norm. ∎
3.6. Existence of a fixed point
One last ingredient for establishing existence of a fixed point of is the compactness of .
Lemma 3.19.
The set is compact with respect to the -norm.
Proof.
For any , we use convexity and monotonicity to obtain
implying that . Based on this, we show that is sequentially compact.
Recall . Let be an arbitrary sequence in . Initialize , . For each integer , let and for some absolute constant that only depends on and . We can choose so that, for all and for all ,
Furthermore, since on , we can apply Ascoli’s theorem to select a sub-sequence of such that for any . Then the diagonal sub-sequence is a Cauchy sequence in the -norm. This proves that is sequentially compact. ∎
We are finally ready to prove the existence of a fixed point of in .
Theorem 3.20.
The map has a fixed point , i.e. .
4. Properties of the fixed-point solution
Throughout this section, we always denote by a fixed point of in , i.e. . We will use this fixed-point relation to derive finer characterizations of . As usual, we write and . Provided that , we have
| (4.1) |
4.1. Regularity
We first show that a fixed point is actually infinitely smooth on , using the fact that the map gains regularity by integration.
Lemma 4.1.
Given , suppose that . If for some integer , then .
Proof.
We can then prove the smoothness of by induction.
Theorem 4.2.
Let be a fixed point of . Then, for all .
Proof.
Write , , and . Since , we know . Moreover, by Corollary 3.16, we also have . Now suppose that for some . Lemma 4.1 then implies that . Recall that
| (4.3) |
Also note that . We immediately have . Rearranging the first equation of (4.1), we obtain
Since , we apparently have . Multiplying the equation above by yields
which implies
This means . Then, since
we further have . That is, . Therefore, we can use induction to show that for all . Next, we can use (4.3), the above results, and the fact to inductively show that for all . Moreover, we can compute that
which implies for all . This completes the proof. ∎
4.2. Asymptotic behavior
Next, we study the asymptotic behavior of as . As we will see, both and actually decay algebraically in the far field with decay rates given explicitly in terms of . The next lemma explains how the asymptotic behavior of relates to that of .
Lemma 4.3.
Given , if for some , then
Moreover, if the limit exists and is finite, then
Proof.
For any , we calculate that
We have used the fact that the non-negative function is integrable on for any . This proves the first result.
To prove the second result, we write the integral as
Since the limit exists and is finite, we know and for any fixed . Also note that the function is absolutely integrable on for any . We then use the dominated convergence theorem to obtain
as claimed. ∎
We can now compute the decay rates of and based on the asymptotic behavior of .
Theorem 4.4.
For any , there are some finite constants such that
and
where
| (4.4) |
As a consequence, if is a fixed point of in , then
4.3. Estimates of
We have shown that the asymptotic decay rates of and are given in terms of , or equivalently, in terms of the ratio . What is left undone is to estimate the value of for a fixed point . We first prove a useful identity as follows.
Lemma 4.5.
Let be a fixed point of . Then,
where
Proof.
Rearranging the first equation of (4.1) we get
Multiply both sides of the equation above by and then integrating them over yields
Since , we can use integration by parts to obtain
and
Hence, we obtain
Substituting in this equation yields the desired identity.
Corollary 4.6.
Let be a fixed point of . Then, and . As a consequence,
Proof.
We conclude this section with a formal proof of our main theorem in the introduction.
Proof of Theorem 1.1.
From Proposition 3.1 and Theorem 3.20 we know the self-similar profiles equations (2.1) admit a solution with , and
where is a fixed point of . By Lemma 3.2 we know , and thus we have . Moreover, we can compute that
Since , we have ; and by Corollary 4.6, we know .
In view of the scaling property (2.4), we can renormalize the solution (by only tuning ) so that . Note that the ratio is invariant under such rescaling. Hence, we have the estimate . Also note that the monotonicity and convexity properties of and are invariant under renormalization. This proves the existence of an exact self-similar solution of the form (1.3) for the HL model (1.1), with the self-similar profiles satisfying properties (1) and (2) in Theorem 1.1. Moreover, (3) the regularity and (4) the asymptotic decay rates of the profiles follow form Theorems 4.2 and 4.4, respectively. This completes the proof. ∎
5. Numerical verification
In this final section, we perform a numerical study to verify and visualize our theoretical results. To this end, we need to obtain numerically accurate self-similar profiles of the HL model.
As a key step in their computer-assisted proof, Chen, Hou, and Huang [3] obtained accurate approximate self-similar profiles by numerically solving the dynamic rescaling equations (2.3) of the HL model with high-order numerical schemes. Owing to the nonlinear stability under the normalization conditions (2.5), the numerical solution (for a large class of initial data) can easily converge to an approximate steady state with extremely small point-wise residual errors. Their computer codes and stored output data can be found in [2].
Instead of using the codes and data off-the-shelf, we construct our own approximate self-similar profiles by numerically solving the fixed-point problem using a direct iterative method. That is, starting with some smooth initial function , we numerically compute
| (5.1) |
More precisely, each iteration is computed in the order of (2.9). After the scheme converges numerically, the self-similar profiles and the scaling factors are then recovered as in Proposition 3.1 and renormalized as in (2.4). Note that a similar fixed-point method for computing the self-similar profiles of the 1D gCLM model was proposed in [9] by the same authors.
We perform the fixed-point computation for two purposes. The first one is to test the well-posedness of the fixed-point problem . We have not been able to prove the uniqueness of a fixed-point of nor the convergence of the scheme (5.1). Nevertheless, this iterative method converges quickly for a bunch of arbitrarily picked initial data in with the maximum residual dropped below an extremely small tolerance ( in our computations, the same standard as in [3]) only within hundreds of iterations. For example, for the initial data , the residual decreases below within 270 iterations; for the initial data that is not in , the residual decreases below within 250 iterations. This makes us believe that the fixed-point of in is unique and the scheme (5.1) is convergent over (and probably convergent for more general initial functions under weaker assumptions).
The second purpose is to check whether the self-similar profiles determined by the fixed-point method in this paper and those obtained by solving the dynamic rescaling equations as in [3] are identical under proper rescaling. It turns out that the numerical profiles obtained by the iterative method (5.1) and those obtained by solving the dynamic rescaling equations (data stored in [2]) under consistent normalization () are almost identical up to only mesh-point-wise errors at the level of . The errors are likely due to the differences in the discretization methods. This convincingly supports our conjecture.
We remark that the most numerically expensive step in one iteration is to compute the function , which involves the evaluation of a linear transform with a dense kernel at all mesh points. The mesh points are distributed adaptively over a sufficiently large one-sided interval (solutions are truncated to for ). An analogous computation (recovering from ) is also needed in every time step when solving the dynamic rescaling equations (2.3) numerically, and it takes more than tens of thousands of time steps for the solution to converge in time. Hence, our method is empirically more efficient than numerically solving the dynamic rescaling equations in obtaining approximate self-similar profiles.
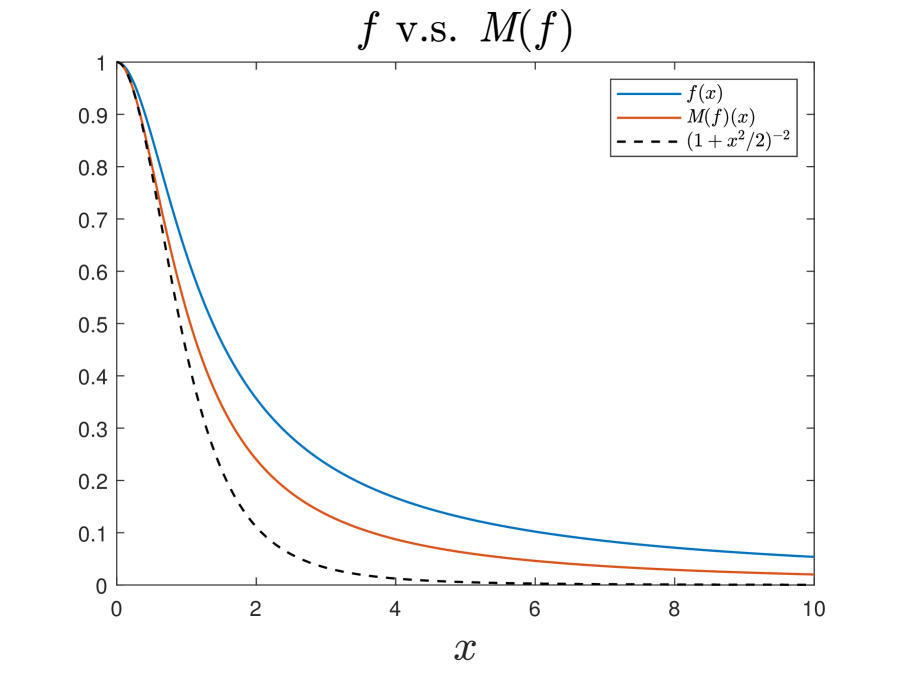
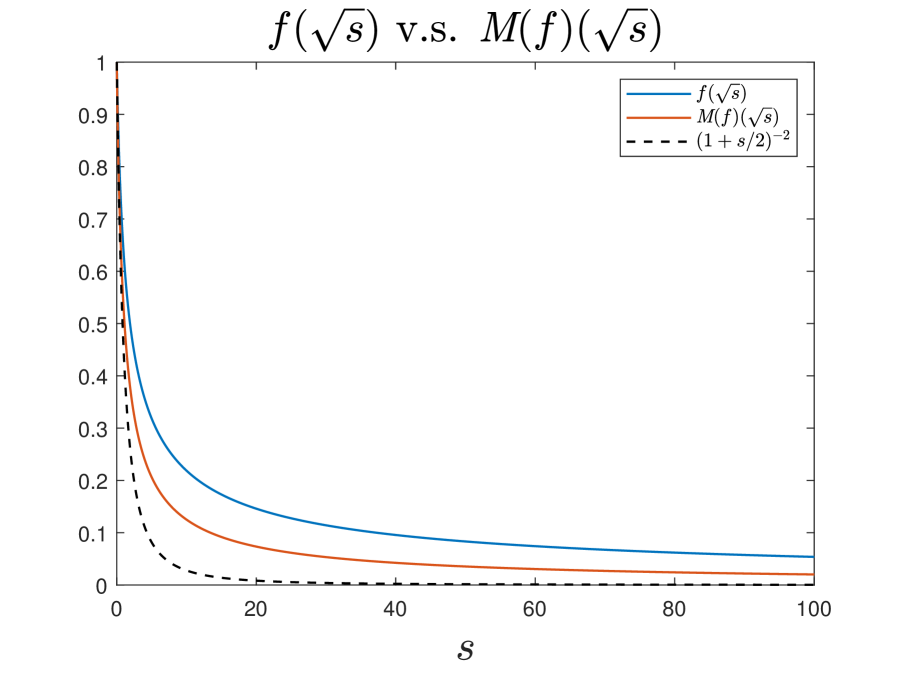
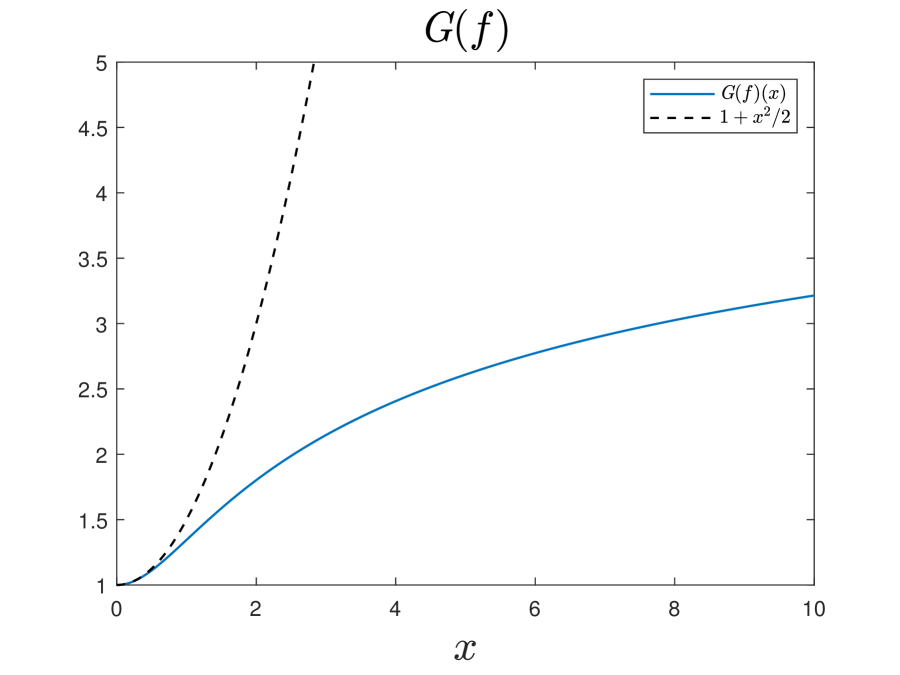
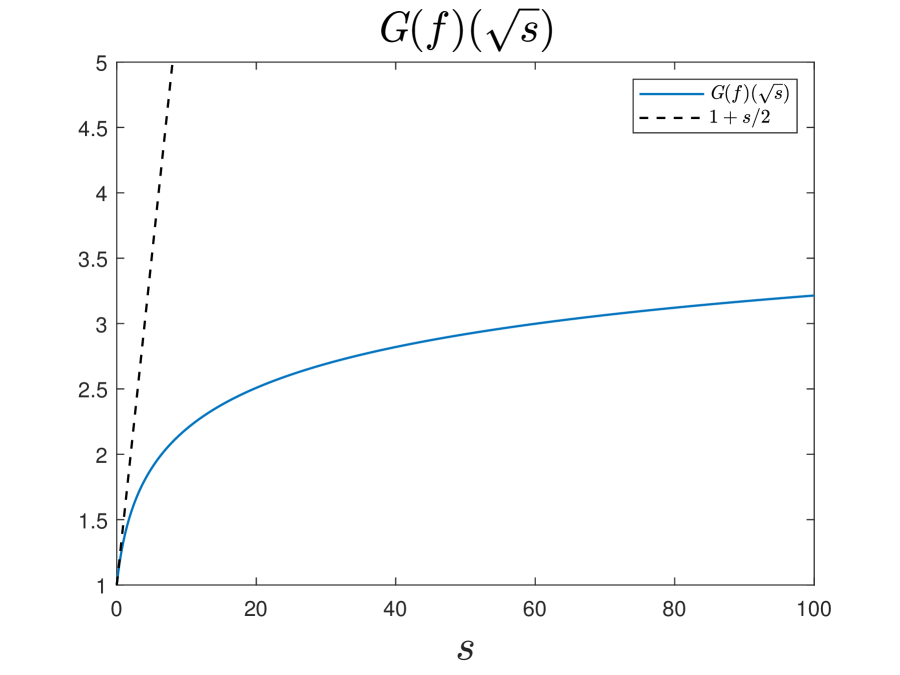
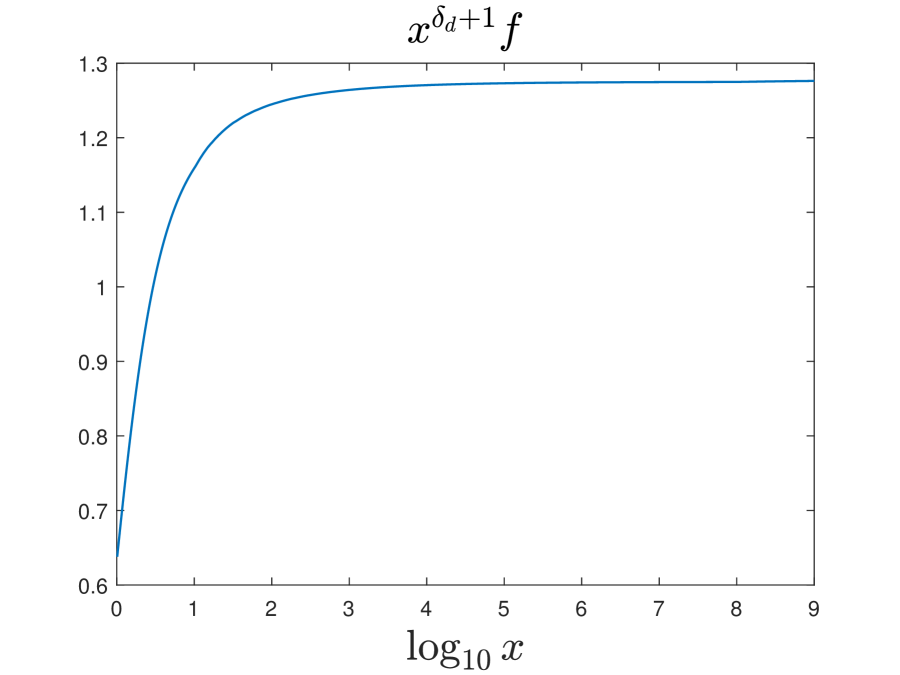
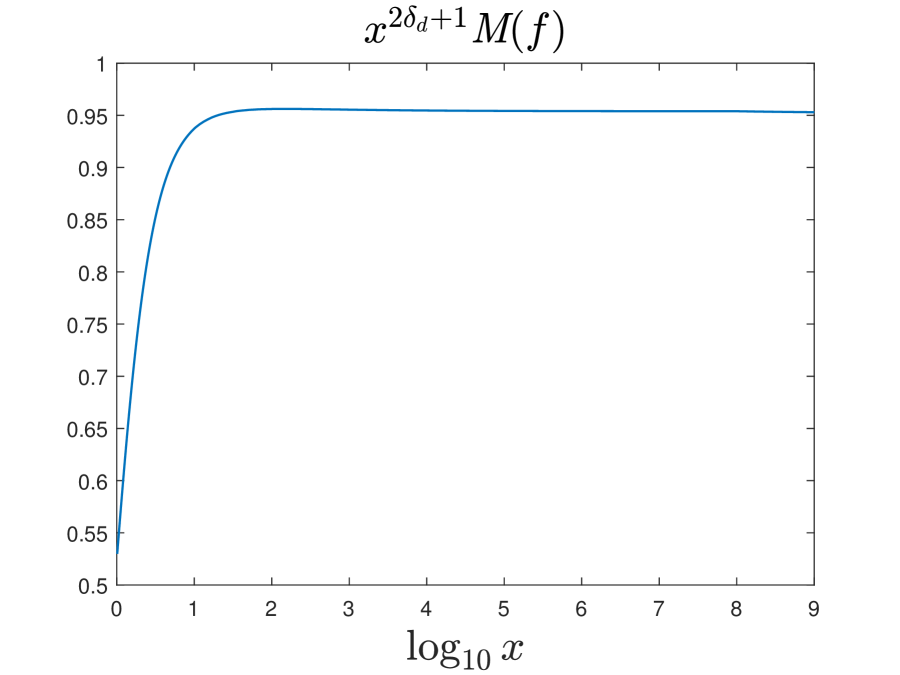
Finally, we provide some plots of the numerically constructed profiles to verify and visualize some of their theoretically proved properties. Figure 5.1 plots the numerically obtained fixed point and the corresponding in and in respectively, verifying that they are both monotone decreasing in , convex in , and lower bounded by for . Figure 5.1 plots the corresponding in a similar way, verifying that it is monotone increasing in , concave in , and upper bounded by for . Figure 5.3 demonstrates asymptotic decay rates of and for sufficiently large , verifying the statements in Theorem 4.4.
Appendix A Useful facts
A.1. Special function
We define
| (A.1) |
The derivative of reads
For , and have the Taylor expansions
For , and have the Taylor expansions
Lemma A.1.
The function defined in (A.1) satisfies
-
(1)
, ;
-
(2)
, , , , ;
-
(3)
and for .
Proof.
Property () is straightforward to check. () follows from the Taylor expansion of and property (). () follows from the Taylor expansion of and property (). ∎
A.2. Special function
We define
| (A.2) |
The derivative of reads
For , and have the Taylor expansions
For , and have the Taylor expansions
Lemma A.2.
The function defined in (A.2) satisfies
-
(1)
;
-
(2)
, , , , ;
-
(3)
for .
-
(4)
for .
Proof.
Properties is straightforward to check. follows from the Taylor expansions of and . follows from the Taylor expansion of and property . can be checked straightforwardly by the definitions of and . ∎
A.3. The Hilbert transform
Lemma A.3.
For any suitable function on ,
As a result,
Proof.
The first equation follows directly from the definition of the Hilbert transform on the real line. The second equation is derived from the first one as follows:
Rearranging the equation above yields the desired result. ∎
Acknowledgement
The authors are supported by the National Key R&D Program of China under the grant 2021YFA1001500.
References
- CH [22] J. Chen and T. Y. Hou. Stable nearly self-similar blowup of the 2D Boussinesq and 3D Euler equations with smooth data. arXiv preprint arXiv:2210.07191, 2022.
- [2] J. Chen, T. Y. Hou, and D. Huang. Matlab codes for computer-aided proofs in the paper “asymptotically self-similar blowup of the Hou–Luo model for the 3D Euler equations”. https://www.dropbox.com/sh/qjs6p6d9n3uiq8r/AABCDI-rZeVuTmBxGQuLJbUva?dl=0.
- CHH [22] J. Chen, T. Y. Hou, and D. Huang. Asymptotically self-similar blowup of the Hou–Luo model for the 3D Euler equations. Annals of PDE, 8(2):24, 2022.
- CHK+ [17] K. Choi, T. Y. Hou, A. Kiselev, G. Luo, V. Sverak, and Y. Yao. On the finite-time blowup of a one-dimensional model for the three-dimensional axisymmetric Euler equations. Communications on Pure and Applied Mathematics, 70(11):2218–2243, 2017.
- CKY [15] K. Choi, A. Kiselev, and Y. Yao. Finite time blow up for a 1D model of 2D Boussinesq system. Communications in Mathematical Physics, 334:1667–1679, 2015.
- CLM [85] P. Constantin, P. D. Lax, and A. Majda. A simple one-dimensional model for the three-dimensional vorticity equation. Communications on pure and applied mathematics, 38(6):715–724, 1985.
- DE [23] T. D. Drivas and T. M. Elgindi. Singularity formation in the incompressible Euler equation in finite and infinite time. EMS Surveys in Mathematical Sciences, 10(1):1–100, 2023.
- DG [90] S. De Gregorio. On a one-dimensional model for the three-dimensional vorticity equation. Journal of statistical physics, 59(5):1251–1263, 1990.
- HQWW [24] D. Huang, X. Qin, X. Wang, and D. Wei. Self-similar finite-time blowups with smooth profiles of the generalized Constantin–Lax–Majda model. Archive for Rational Mechanics and Analysis, 248(2):22, 2024.
- [10] G. Luo and T. Y. Hou. Potentially singular solutions of the 3D axisymmetric Euler equations. Proceedings of the National Academy of Sciences, 111(36):12968–12973, 2014.
- [11] G. Luo and T. Y. Hou. Toward the finite-time blowup of the 3D axisymmetric Euler equations: a numerical investigation. Multiscale Modeling & Simulation, 12(4):1722–1776, 2014.
- Liu [17] P. Liu. Spatial Profiles in the Singular Solutions of the 3D Euler Equations and Simplified Models. PhD thesis, California Institute of Technology, 2017.
- MB [02] A. J. Majda and A. L. Bertozzi. Vorticity and Incompressible Flow, volume 27. Cambridge University Press, 2002.
- OSW [08] H. Okamoto, T. Sakajo, and M. Wunsch. On a generalization of the Constantin–Lax–Majda equation. Nonlinearity, 21(10):2447, 2008.