On the eigenvalues of the spheroidal wave equation
Abstract.
This paper presents some new results on the eigenvalues of the spheroidal wave equation. We study the angular and Coulomb spheroidal wave equation as a special case of a more general linear Hamiltonian system depending on three parameters. We prove that the eigenvalues of this system satisfy a first-order quasilinear partial differential equation with respect to the parameters. This relation offers a new insight on how the eigenvalues of the spheroidal wave equation depend on the spheroidal parameter. Apart from analytical considerations, the PDE we obtain can also be used for a numerical computation of spheroidal eigenvalues.
Key words and phrases:
spheroidal eigenvalues, Coulomb spheroidal wave equation, linear Hamiltonian system, inviscid forced Burgers’ equation, deformation method1991 Mathematics Subject Classification:
33E10, 33F05, 34L15, 35F201. Introduction
The angular spheroidal wave equation
| (1) |
appears in many fields of physics and engineering like quantum mechanics, electromagnetism, signal processing etc. Here is supposed to be some given real number, and since only occurs in (1), we may assume without loss of generality. In many applications the so-called spheroidal parameter (or size parameter) is either real or purely imaginary, so that is a real number which may also be negative. If is an integer and is real, then the separation of the Helmholtz equation in prolate () or oblate () spheroidal coordinates results in a second order ODE of the form (1). A slightly more general differential equation is the Coulomb spheroidal wave equation (CSWE)
| (2) |
It differs from (1) only by the presence of a linear term with some additional parameter , which we also assume to be real. The numbers for which (2) has a nontrivial bounded solution on are the eigenvalues (or characteristic values) of the CSWE, and the corresponding eigenfunctions are called Coulomb spheroidal functions. They appear in astrophysics and molecular physics and provide, for example, exact wave functions for a one-electron diatomic molecule with fixed nuclei (see [1, Chapter 9] or [2]). In our subsequent considerations, it does not make much difference whether we include the term or not. Therefore, in this paper we will mainly deal with equation (2), while the results we obtain are obviously applicable to the angular spheroidal wave equation (1) as well.
For technical reasons we introduce the parameters , , which are related to , , in (2) by
| (3) |
Moreover, we set . With these parameters in mind, we will see that the differential system
| (4) |
is related to the Coulomb spheroidal wave equation by the following means: In section 2 we show that (4), in combination with appropriate boundary conditions, can be written as an eigenvalue problem for a self-adjoint differential operator . The eigenvalues of depend analytically on the parameters , and in addition they have the following properties:
- (a)
-
(b)
The eigenvalues of (4) satisfy the first-order quasilinear partial differential equation
(5)
According to (a), the eigenvalue problem (4) may be regarded as a generalization of the Coulomb spheroidal wave equation, and the PDE (5) describes an analytic relation between the eigenvalues and the parameters, where the eigenfunctions need not to be known. A similar observation has already been made in [3] for the Chandrasekhar-Page equation, and [4] provides a method by which one can establish such a relation between the eigenvalues and the parameters in terms of a PDE for other linear Hamiltonian systems as well. In the present paper we will use this \qqdeformation method from [4] to prove assertion (b). Finally, in section 3 we solve (5) by the method of characteristics, where we consider the prolate spheroidal wave equation (, ) in more detail. In this case, we can associate a linear differential system to (1) which contains only two parameters in addition to the eigenvalue parameter, so that the partial differential equation for the eigenvalues can be further simplified.
2. A linear Hamiltonian system associated to the CSWE
In this section we study the linear Hamiltonian system (4) on the interval . It depends on three parameters , where with some constant , and the prime denotes the derivative with respect to . If we define
and
| (6) |
where combines the three parameters, then (4) can be written in the form . Moreover, as and for all , defines for fixed parameters a formally self-adjoint differential expression in the Hilbert space
of square-integrable vector functions to the weight function with scalar product
The maximal operator generated by has the domain (cf. [5, Section 3])
| (7) |
whereas the domain of the minimal operator associated to is given by
In order to establish the self-adjointness of , we first prove that is in the limit point case at and . To this end, we consider the differential equation in the complex plane. It is equivalent to the system
| (8) |
with regular singular points at and . If denotes the unit disk centered at , then [3, Lemma 6] implies that for fixed there exists a fundamental matrix of the form , , where is an analytic matrix function,
and is an analytic function with if is not an integer. Furthermore, the transformation yields
and hence (8) also possesses a fundamental matrix of the form , , where is an analytic matrix function,
and being an analytic function satisfying if is not an integer. For fixed parameters , the solution
of (8) asymptotically behaves like as (here and in the following, denotes the standard basis of ). Since and as , the function is not integrable at , and hence does not lie left in . Moreover, for the solution
we get as . Therefore, is not integrable at , and thus does not lie right in . According to Weyl’s alternative (see e. g. [5, Theorem 5.6]), the differential expression is in the limit point case at both endpoints. Hence, the closure of its associated minimal operator is a self-adjoint extension of (cf. [6, Theorem 5.4]), and because of (see [5, Theorem 3.9]), this extension coincides with the maximal operator , so that is actually a self-adjoint differential operator in the Hilbert space .
In the following, we will study the eigenvalues of the self-adjoint operator associated to and their dependence on the parameters . For this purpose, we introduce the functions and , which asymptotically behave like
| (9) |
Note that , as well as , form a fundamental system of (4). Since the solutions and are not square-integrable with respect to , is an eigenvalue of for fixed if and only if there exists a nontrivial solution of (4) which is a constant multiple of both and . Additionally, by virtue of and the asymptotic behavior of the fundamental solutions at the boundary points, a nontrivial solution of (4) is an eigenfunction if and only if is bounded on . Furthermore, we can write as a linear combination
| (10) |
with , called connection coefficients. Since for any fixed
where the fundamental matrices depend analytically on the parameters, also and depend analytically on . Due to our considerations above, is an eigenvalue of if and only if . As is an entire function for fixed , the zeros of are isolated, and thus also the eigenvalues of are isolated with multiplicity .
Lemma 1.
Proof.
The system (8) with is equivalent to
If we introduce the vector function
| (11) |
then this differential system takes the form
| (12) |
Since with , we obtain that is an eigenvalue of if and only if (12) has a nontrivial solution which is bounded on . Using , we can write (12) in terms of its components and :
Solving the second equation for yields
| (13) |
and inserting this expression into the first equation gives the differential equation
for which is a CSWE (2) with parameters (3). Conversely, any bounded solution of this ODE is a Coulomb spheroidal function having the form with some entire function , cf. [7, Section 3.2, Satz 1]. If we define by (13), then is also bounded on , and hence the function defined by (11) is a bounded solution of (12) which implies that is an eigenvalue of (4). ∎
In the next step we examine which way the eigenvalues of (4) depend on the parameters .
Theorem 2.
Let be the self-adjoint realization of the differential expression (6) with domain given by (7), and suppose that is an eigenvalue of for some given parameter vector . Then there exists a domain with and eigenvalues of with , such that depends analytically on . In addition, satisfies the first-order partial differential equation (5) on .
Proof.
We first prove the analytic dependence of the eigenvalues on the parameters in a neighborhood of . For this, let
If denotes the symmetric multiplication operator in , then . Since
we have for all with some constant , and
implies that is even a bounded operator on for all . From [8, Chap. V, § 4, Theorem 4.3 and Chap. VII, § 2, Theorem 2.6] it follows that defines a holomorphic family of self-adjoint operators, where its domain is independent of . As shown in [8, Chap. VII, § 2, Sec. 4 and § 3, Sec. 1 – 2] there exists a domain with as well as an analytical function with , such that is a simple eigenvalue of for all .
Now, if is an eigenvalue of , then each corresponding eigenfunction is a constant multiple of the fundamental solutions and , respectively. Hence, for all with some factor which depends analytically on , and therefore , where is an analytic function on some domain which satisfies
due to (9). Obviously , and
defines a smooth function . Setting , then
is an eigenfunction corresponding to for which holds for all , and depends infinitely differentiable on . Since the matrix functions and are also infinitely differentiable with respect to all variables, the assumptions (a), (b), (c) in [4] are fulfilled. In addition, if we introduce the matrix function
then a direct calculation gives
| (14) |
where the functions and on the right hand side are defined by
Here, and are differentiable functions, and therefore also assumption (d) in [4] is satisfied. In addition to the \qqdeformation equation (14), the function
lies in . Finally, from [4, Theorem 2.2] it follows that solves
on , and this is exactly the first-order quasilinear PDE (5). ∎
The eigenvalues of (4) coincide with the zeros of the function , and this is one of the connection coefficients appearing in (10). The question arises how this function can be calculated numerically for given parameter values and . In [9], the Coulomb spheroidal wave equation has already been associated to a differential system, which is, however, different from the linear Hamiltonian system studied in the present paper. Nevertheless, the method suggested in [9] for calculating the connection coefficient can also be applied to the system (4). To this end, we apply the transformation , which turns (4) resp. (8) into the differential system
| (15) |
where
For fixed it has the Floquet solution
where is holomorphic in , and is an eigenvector of corresponding to the eigenvalue . Finally, once we have determined the series coefficients using the recurrence relation
| (16) |
for starting with , then we can compute with arbitrary precision by means of
Lemma 3.
Let and be fixed. Then for each we have
More precisely, we obtain as for arbitrary small .
This assertion, as well as formula (16), is obtained by a similar reasoning as given in [9, Section 3], and therefore the proof is omitted here. If we set and calculate the zeros of the function , then we get the eigenvalues of the Coulomb spheroidal wave equation (2) for the parameters and according to Lemma 1. This approach, like the method presented in [9], provides a simple and efficient way to obtain the eigenvalues of a CSWE. However, with increasing parameter values, numerical effects such as rounding errors or digit cancellation may occur, which require some computational effort to overcome. In this context the partial differential equation (5) may be helpful. It not only provides us with new insights into the analytical dependence of the eigenvalues on the parameters, but can also be used to determine the Coulomb spheroidal eigenvalues numerically. For this purpose, we need to examine the PDE and its characteristics in more detail.
3. Analysis of the PDE for the eigenvalues
The PDE (5) looks very complicated at first sight, but it has some remarkable properties that simplify the calculation of the solution by the method of characteristics. The characteristic curves related to the quasilinear PDE (5) satisfy the (nonlinear) first-order differential system
| (17) |
We can choose the parameter for the characteristic curve in such a way that the initial conditions are given at . If we define the scalar function
then (17) and a straightforward calculation yields . In particular, if , then , and therefore holds for all along such a characteristic curve. If, in addition, for some , then we get . According to Lemma 1, also implies that is an eigenvalue of the Coulomb spheroidal wave equation (2) for the parameters and , where in turn reduces the CSWE to the ordinary (angular) spheroidal wave equation. All in all, the above considerations provide an alternative method for the numerical computation of spheroidal eigenvalues:
Theorem 4.
Suppose that , and are solutions of the differential system
| (18) |
on an interval satisfying , , with some given initial values such that . If holds for some , then is an eigenvalue of the angular spheroidal wave equation (1) for the parameter .
Proof.
If we set , then , and hence is an isolated eigenvalue of the operator for . According to Theorem 2, we can find an analytic continuation on some domain with , such that is an eigenvalue of satisfying, in addition, the partial differential equation (5). Defining , then we can write the second equation in (18) as
Moreover, the differential equations (18) imply
Hence, the functions , , , satisfy the characteristic equations (17), and from the initial values , , , it follows that this characteristic curve lies completely on the integral surface . In particular, , and therefore is an eigenvalue of (4) for the parameter values , , . Finally, if , then implies , and is an eigenvalue of (1) for the spheroidal parameter . ∎
We may, for example, choose in Theorem 4, and then we need to find a zero of the function for some given initial value . Then we have to solve the differential system (18) with , , on some interval with by an appropriate numerical method, and we follow the path of this characteristic curve until we get for some . Finally, we arrive at an eigenvalue of the angular spheroidal wave equation (1) for . In the appendix, this method is illustrated by a concrete numerical example, namely for the values and .
The differential system (17) in Theorem 4 may also be regarded as the characteristic equation of a PDE for a function with only two variables and . The question arises whether one can associate a more simple linear Hamiltonian system with the spheroidal wave equation (), which then yields a PDE for the eigenvalues that is less complicated than (5). In the remainder of this paper we address this problem, where we restrict our consideration to the case of the prolate spheroidal wave equation (2) with and . For this purpose, we fix in (4) resp. (8), and we assume , in which case also holds.
First, let us introduce new parameters that make the coefficient matrix of the differential system (8) appear more symmetric, and these are
| (19) |
where and . Note that conversely
By means of the transformation
| (20) |
the differential system (4) resp. (8) is equivalent to the system
which can be written in the form , where
By a similar reasoning as for (6), it follows that the differential expression is in the limit point case at and . Hence, the closure of its associated minimal operator is the only self-adjoint realization of in the Hilbert space . We denote this self-adjoint operator by . By virtue of (20), we have if and only if . Hence, is an eigenvalue of if and only if is an eigenvalue of .
Now, like in Theorem 2, suppose that is an eigenvalue of , which depends analytically on the parameters in some domain . If we introduce the matrix function
then a direct calculation shows that the deformation equation
is fulfilled with the functions
From [4, Theorem 2.2] it follows that the eigenvalues satisfy the first-order quasilinear PDE
| (21) |
Using Lemma 1 with , we obtain that is an eigenvalue of (2) for the parameters , if and only if is an eigenvalue of . In this case and , i.e., the CSWE reduces to the angular spheroidal wave equation (1). Note that is equivalent to . Since and , it follows that is an eigenvalue of (1) for if and only if is an eigenvalue of .
Finally, let us simplify the PDE (21) even further. To this end, we need to modify the parameters introduced in (19) once more. We set
With these parameters we convert the eigenvalue problem to
| (22) |
where now is the eigenvalue parameter, and
Theorem 5.
Let be an eigenvalue of the linear Hamiltonian system (22), and suppose that depends analytically on the parameters in some domain . Then solves the quasilinear partial differential equation
| (23) |
on . Moreover, is an eigenvalue of the spheroidal wave equation (1) for if and only if the equation is satisfied for some .
Proof.
It is worth mentioning that the partial differential equation (23) is basically a forced inviscid Burgers’ equation. In fact, if we set , then (23) becomes
and this quasilinear PDE can be written in the form . The forced inviscid Burgers’ equation is commonly encountered in fluid mechanics or gas dynamics, where it is used, for example, to study nonlinear interactions of dispersive waves. It is quite surprising that this PDE is related to the linear Hamiltonian system (22) and thus as well to the eigenvalues of the spheroidal wave equation.
4. Conclusion
Calculating the eigenvalues of a spheroidal wave equation is known to be a tricky task. There is an ongoing effort in finding new techniques to compute these eigenvalues in a convenient way and with high precision (see, for example, [1], [9], [10], [11], [12], [13] and the references therein). In the present work, we used an approach via a differential system. Apart from some numerical issues, we have mainly studied the analytical dependence of the eigenvalues on the parameters and (or , , , respectively). Results such as those in Theorem 5 and relations like the PDE (5) may help to obtain new insights into the analytic properties of the angular or Coulomb spheroidal eigenvalues. The CSWE, in turn, is a special case of the confluent Heun differential equation (CHE), which is likewise a subject of current research. The methods presented here may also apply to the CHE and to even more general eigenvalue problems.
Appendix: A numerical example
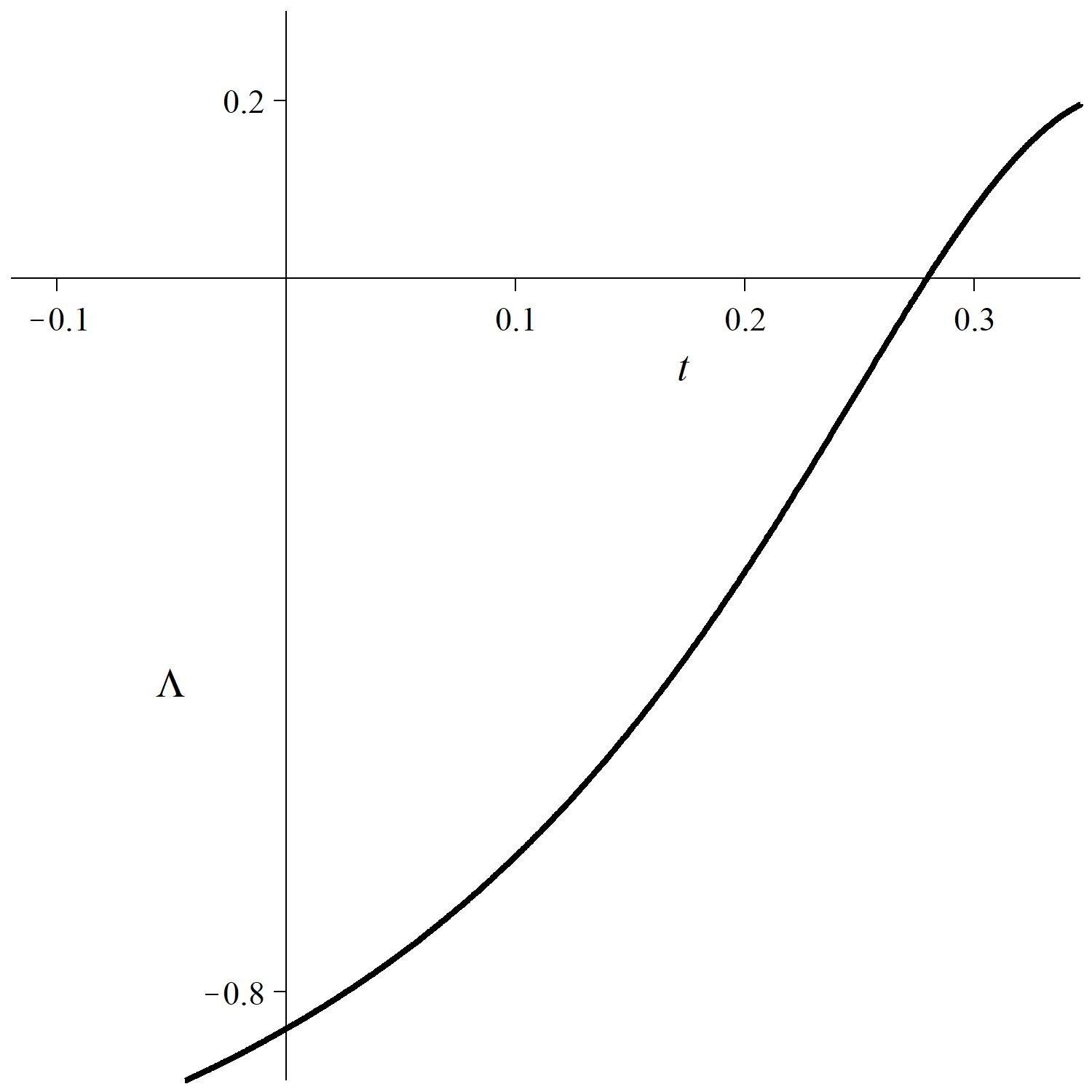
In section 3, as an application of Theorem 4, it has been suggested to compute an eigenvalue of the spheroidal wave equation by starting from a zero of the function and then following a characteristic curve of the PDE (5) until a zero of the function is located. As a concrete numerical example, let us consider the function in the case for . The limit formula in Lemma 3 provides the function shown in Fig. 1. It has a zero at , which can be determined, for instance, with the secant method. Here, all results are displayed rounded to decimal places, while the calculations were internally done with higher precision. Solving the differential system (18) for the initial values , , by means of the Runge-Kutta method, we obtain , and . The function is illustrated in Fig. 2; it has a zero at . Evaluating , at finally gives the eigenvalue for the spheroidal wave equation (1) with parameter .

References
- [1] P. E. Falloon, Theory and computation of spheroidal harmonics with general arguments, Master’s thesis, The University of Western Australia, Department of Physics (2001).
- [2] T. Kereselidze, J. F. Ogilvie, The hydrogen-atom problem and Coulomb Sturmian functions in spheroidal coordinates, Vol. 77 of Advances in Quantum Chemistry, Academic Press, 2018, pp. 391–421. doi:10.1016/bs.aiq.2018.02.002.
- [3] D. Batic, H. Schmid, M. Winklmeier, On the eigenvalues of the Chandrasekhar-Page angular equation, Journal of Mathematical Physics 46 (1) (2005) 012504. doi:10.1063/1.1818720.
- [4] H. Schmid, On the deformation of linear Hamiltonian systems, Journal of Mathematical Analysis and Applications 499 (2) (2021) 125051. doi:10.1016/j.jmaa.2021.125051.
- [5] J. Weidmann, Spectral Theory of Ordinary Differential Operators, vol. 1258 of Lecture Notes in Mathematics, Springer, Berlin – Heidelberg, 1987. doi:10.1007/BFb0077960.
- [6] H. Sun, Y. Shi, Self-adjoint extensions for linear Hamiltonian systems with two singular endpoints, Journal of Functional Analysis 259 (2010) 2003–2027. doi:10.1016/j.jfa.2010.06.008.
- [7] J. Meixner, F. W. Schäfke, Mathieusche Funktionen und Sphäroidfunktionen, Springer, New York, 1954, in German. doi:10.1007/978-3-662-00941-3.
- [8] T. Kato, Perturbation theory for linear operators, 2nd Edition, vol. 1258 of Lecture Notes in Mathematics, Springer, Berlin – Heidelberg – New York, 1995. doi:10.1007/978-3-642-66282-9.
- [9] H. Schmid, Computation of the eigenvalues for the angular and Coulomb spheroidal wave equation, Applied Numerical Mathematics 185 (2023) 101–119. doi:10.1016/j.apnum.2022.11.018.
- [10] C. Flammer, Spheroidal Wave Functions, Stanford University Press, Stanford, CA, 1957.
- [11] D. B. Hodge, Eigenvalues and eigenfunctions of the spheroidal wave equation, Journal of Mathematical Physics 11 (8) (1970) 2308. doi:10.1063/1.1665398.
- [12] P. Kirby, Calculation of spheroidal wave functions, Computer Physics Communications 175 (7) (2006) 465–472. doi:10.1016/j.cpc.2006.06.006.
- [13] S. L. Skorokhodov, Calculation of eigenvalues and eigenfunctions of the Coulomb spheroidal wave equation, Matematicheskoe modelirovanie 27 (7) (2015) 111–116, in Russian.