∎
22email: [email protected] 33institutetext: Yu-Hong Dai 44institutetext: LSEC, ICMSEC, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, 100190, Beijing, China
44email: [email protected] 55institutetext: Xin-Wei Liu 66institutetext: Institute of Mathematics, Hebei University of Technology, Tianjin 300401, China
66email: [email protected] 77institutetext: Hongchao Zhang 88institutetext: Department of Mathematics, Louisiana State University, Baton Rouge, LA 70803-4918, USA
88email: [email protected]
On the acceleration of the Barzilai-Borwein method
Abstract
The Barzilai-Borwein (BB) gradient method is efficient for solving large-scale unconstrained problems to the modest accuracy and has a great advantage of being easily extended to solve a wide class of constrained optimization problems. In this paper, we propose a new stepsize to accelerate the BB method by requiring finite termination for minimizing two-dimensional strongly convex quadratic function. Combing with this new stepsize, we develop gradient methods which adaptively take the nonmonotone BB stepsizes and certain monotone stepsizes for minimizing general strongly convex quadratic function. Furthermore, by incorporating nonmonotone line searches and gradient projection techniques, we extend these new gradient methods to solve general smooth unconstrained and bound constrained optimization. Extensive numerical experiments show that our strategies of properly inserting monotone gradient steps into the nonmonotone BB method could significantly improve its performance and the new resulted methods can outperform the most successful gradient decent methods developed in the recent literature.
MSC:
90C20 90C25 90C301 Introduction
Gradient descent methods have been widely used for solving smooth unconstrained nonlinear optimization
| (1) |
by generating a sequence of iterates
| (2) |
where is continuously differentiable, and is the stepsize along the negative gradient. Different gradient descent methods would have different rules for determining the stepsize . The classic steepest descent (SD) method proposed by Cauchy cauchy1847methode determines its stepsize by the so-called exact line search
| (3) |
Although the SD method locally has the most function value reduction along the negative gradient direction, it often performs poorly in practice. Theoretically, when is a strongly convex quadratic function, i.e.,
| (4) |
where and is symmetric and positive definite, SD method converges -linearly akaike1959successive and will asymptotically perform zigzag between two orthogonal directions forsythe1968asymptotic ; huang2019asymptotic .
In 1988, Barzilai and Borwein barzilai1988two proposed the following two novel stepsizes that significantly improve the performance of gradient descent methods:
| (5) |
where and . Clearly, when , one has . Hence, is often called the long BB stepsize while is called the short BB stepsize. When the objective function is quadratic (4), the BB stepsize will be exactly the steepest descent stepsize, but with one step retard, while will be just the stepsize of minimal gradient (MG) method dai2003altermin , that is
It is proved that the Barzilai-Borwein (BB) method converges -superlinearly for minimizing two-dimensional strongly convex quadratic function barzilai1988two and -linearly for the general -dimensional case dai2002r . Although the BB method does not decrease the objective function value monotonically, extensive numerical experiments show that it performs much better than the SD method fletcher2005barzilai ; raydan1997barzilai ; yuan2008step . And it is commonly accepted that when a not high accuracy is required, BB-type methods could be even competitive with nonlinear conjugate gradient (CG) methods for solving smooth unconstrained optimization fletcher2005barzilai ; raydan1997barzilai . Furthermore, by combing with gradient projection techniques, the BB-type methods have a great advantage of easy extension to solve a wide class of constrained optimization, for example the bound or simplex constrained optimization dai2005projected . Hence, BB-type methods enjoy many important applications, such as image restoration wang2007projected , signal processing liu2011coordinated , eigenvalue problems jiang2013feasible , nonnegative matrix factorization huang2015quadratic , sparse reconstruction wright2009sparse , machine learning tan2016barzilai , etc.
Recently, Yuan yuan2006new ; yuan2008step propose a gradient descent method which combines a new stepsize
| (6) |
in the SD method so that the new method enjoys finite termination for minimizing a two-dimensional strongly convex quadratic function. Based on this new stepsize , Dai and Yuan dai2005analysis further develop the DY method, which alternately employs and stepsizes as follows
| (7) |
It is easy to see that . Hence, DY method (7) is a monotone method. Moreover, it is shown that DY method (7) performs better than the nonmonotone BB method dai2005analysis .
The property of nonmonotonically reducing objective function values is an intrinsic feature that causes the efficiency of BB method. However, it is also pointed out by Fletcher fletcher2012limited that retaining monotonicity is important for a gradient method, especially for minimizing general objective functions. On the other hand, although the monotone DY method performs well, using and in a nonmonotone fashion may yield better performance, see de2014efficient for example. Moreover, it is usually difficult to compute the exact monotone stepsize in general optimization. Hence, in this paper, motivated by the great success of the BB method and the previous considerations, we want to further improve and accelerate the nonmonotone BB method by incorporating some monotone steps. For a more general and uniform analysis, we first consider to accelerate the class of gradient descent methods (2) for quadratic optimization (4) using the following stepsize
| (8) |
where is a real analytic function on that can be expressed by a Laurent series
such that for all . Here, and are the smallest and largest eigenvalues of , respectively. Clearly, the method (8) is generally nonmonotone and the two BB stepsizes and can be obtained by setting and in (8), respectively.
More particularly, we will derive a new stepsize, say , which together with the stepsize in (8) can minimize the two-dimensional convex quadratic function in no more than iterations. To the best of our knowledge, this is the first nonmonotone gradient method with finite termination property. We will see that and . Hence, this finite termination property is essentially obtained by inserting monotone stepsizes into the generally nonmonotone stepsizes (8). In fact, we show that this finite termination property can be maintained even the algorithm uses different function ’s during its iteration. Based on this observation, to achieve good numerical performance, we propose an adaptive nonmonotone gradient method (ANGM), which adaptively takes some nonmonotone steps involving the long and short BB stepsizes (5), and some monotone steps using . Moreover, to efficiently minimize more general nonlinear objective function, we propose two variants of ANGM, called ANGR1 and ANGR2, using certain retard stepsize. By combing nonmonotone line search and gradient projection techniques, these two variants of gradient methods are further extended to solve bound constrained optimization. Our numerical experiments show that the new proposed methods significantly accelerate the BB method and perform much better on minimizing quadratic function (4) than the most successful gradient decent methods developed in the recent literature, such as DY method dai2005analysis , ABBmin2 method frassoldati2008new and SDC method de2014efficient . In addition, we also compare ANGR1 and ANGR2 with the spectral projected gradient (SPG) method birgin2000nonmonotone ; birgin2014spectral and the BB method using Dai-Zhang nonmonotone line search (BB1-DZ) dai2001adaptive for solving the general unconstrained problems from andrei2008unconstrained and the bound constrained problems from the CUTEst collection gould2015cutest . The numerical results highly suggest the potential benefits of our new proposed methods for solving more general unconstrained and bound constrained optimization.
The paper is organized as follows. In Section 2, we derive the new stepsize by requiring finite termination on minimizing two-dimensional strongly convex quadratic function. In Section 3, we first derive the ANGM, ANGR1 and ANGR2 methods for minimizing general strongly convex quadratic function and then generalize ANGR1 and ANGR2 to solve bound constrained optimization. Our extensive numerical experiments on minimizing strongly convex quadratic function and solving general unconstrained and bound constrained optimization are presented in Section 4. We finally draw some conclusion remarks in Section 5.
2 Derivation of new stepsize
In this section, we derive a new monotone stepsize based on the nonmonotone gradient method (8) to minimize quadratic function (4). This new stepsize is motivated by requiring finite termination for minimizing two-dimensional strongly convex quadratic function. Such an idea was originally proposed by Yuan yuan2006new to accelerate SD method. However, new techniques need to be developed for accelerating the class of nonmonotone gradient descent methods (8) since the key orthogonal property of successive two gradients generated by SD method no longer holds for methods (8).
Observe that the method (8) is invariant under translations and rotations when minimizing quadratics. Hence, for theoretical analysis to minimize (4), without loss of generality, we may simply assume that the matrix is diagonal, i.e.,
| (9) |
where .
2.1 Motivation
First, let us investigate the behavior of gradient method (8) with (i.e., the BB1 method). Particularly, we apply it to the non-random quadratic minimization problem proposed in de2014efficient , which has the form (4) with a diagonal matrix given by
| (10) |
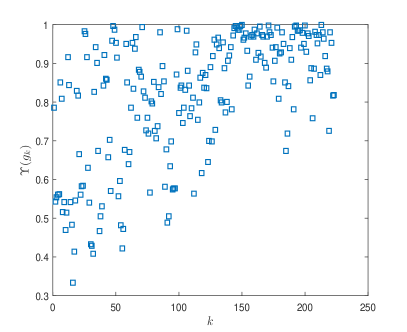
and being a null vector. Here, and is the condition number of . We set , and use as the initial point. The iteration was stopped once the gradient norm is reduced by a factor of . Denote the -th component of by and the indices of the components of with two largest magnitudes by and , respectively. Then, the percentage of the magnitudes of the first two largest components to that of the whole gradient can be computed by
This is plotted in Fig. 1 (left), where we can see that holds for more than half of the iterations (145 out of 224 total iterations). Hence, roughly speaking, the searches of the BB1 method are often dominated in some two-dimensional subspaces. The history of index against the iteration number is also plotted in Fig. 1 (right), where we can see that corresponds more frequently to the largest eigenvalues or . Since
| (11) |
and , the history of in Fig. 1 (right) in fact indicates that, most stepsizes generated by the BB1 method are often much larger than or . As a result, the BB1 method may need many iterations to reduce the corresponding components of the gradients or .

In huang2019asymptotic , we showed that a family of gradient methods including SD and MG will asymptotically reduce their searches in a two-dimensional subspace and could be accelerated by exploiting certain orthogonal properties in this two-dimensional subspace. In a similar spirit, we could also accelerate the convergence of the class of gradient methods (8) in a lower dimensional subspace if certain orthogonal properties hold.
Suppose that, for a given , there exists a satisfying
| (12) |
Since this is also invariant under translations and rotations, for later analysis we may still assume in (12) is diagonal as in (9). The following lemma shows a generalized orthogonal property for and , which is a key property for deriving our new stepsize in the next subsection.
Lemma 1 (Orthogonal property)
2.2 A new stepsize
In this subsection, we derive a new stepsize based on the iterations of gradient method (8). We show that combining the new stepsize with gradient method (8), we can achieve finite termination for minimizing two-dimensional strongly convex quadratic functions.
By Lemma 1, we have that for . Now, suppose both and are nonzero vectors, where . Let us consider to minimize the function in a two-dimensional subspace spanned by and , and let
| (14) |
where
| (15) |
and
| (16) |
Denote the components of by , and notice that by . Then, we have the following finite termination theorem.
Theorem 2.1 (Finite termination)
Proof
Let us suppose is not a minimizer for all . We then show must be the minimizer, i.e., . For notation convenience, in the following proof of this theorem, let’s simply use to denote . First, we show that using stepsize (17) at the -th iteration implies
| (18) |
where and is given by (15) and (16). In fact, given by (17) satisfies the following quadratic equation
| (19) |
where . Let
where are components of , . Then, multiplying to (19), we have
| (20) |
which is exactly
| (21) |
The above identity (2.2) implies the vector
is parallel to
which written in a matrix format just means
| (22) |
Since , we have . Then, it follows from , , and that . So, we have from (22) that (18) holds. Therefore, (17) implies (18) holds.
Now, it follows from (15) and that
Hence, (18) implies is parallel to . So, if given by (17) is used at the -th iteration, then is parallel to . Since is not the minimizer, we have . So, is an eigenvector of , i.e. for some . Since is not the minimizer, we have and the algorithm will not stop at the -th iteration. So, by (8), we have . Hence, we have , which implies must be the minimizer. We complete the proof. ∎
Notice that by setting in the above Theorem 2.1, the new gradient method in Theorem 2.1 will find the exact minimizer in at most iterations when minimizing a two-dimensional strongly convex quadratic function. In fact, since and , the equation (19) has two positive roots and . This observation allows us to use the stepsize with some retards as stated in the following corollary, which would lead us a more convenient way for choosing stepsizes when the objective function is not quadratic.
Corollary 1
By setting , and in (16), and setting in (17), we can derive the following two stepsizes:
| (23) |
and
| (24) |
respectively, where
| (25) |
| (26) |
Hence, both and are short monotone steps for reducing the value and gradient norm of the objective function, respectively. And it follows from Theorem 2.1 that by inserting the monotone steps and into the BB1 and BB2 methods, respectively, the gradient method will have finite termination for minimizing two-dimensional strongly convex quadratic functions.
To numerically verify this finite termination property, we apply the method (8) with (i.e., the BB1 method) and given by (23) to minimize a two-dimensional quadratic function (4) with
| (27) |
We run the algorithm for five iterations using ten random starting points. The averaged values of and are presented in Table 1. Moreover, we also run BB1 method for a comparison purpose. We can observe that for different values of , the values of and obtained by BB1 method with given by (23) are numerically very close to zero. However, even for the case , and obtained by pure BB1 method are far away from zero. These numerical results coincide with our analysis and show that the nonmonotone method (8) can be significantly accelerated by incorporating proper monotone steps.
3 New methods
In this section, based on the above analysis, we propose an adaptive nonmonotone gradient method (ANGM) and its two variants, ANGR1 and ANGR2, for solving both unconstrained and box constrained optimization. These new gradient methods adaptively take some nonmonotone steps involving the long and short BB stepsizes (5), and some monotone steps using the new stepsize developed in the previous section.
3.1 Quadratic case
As mentioned in Section 2.1, the stepsizes generated by the BB1 method may be far away from the reciprocals of the largest eigenvalues of the Hessian matrix of the quadratic function (4). In other words, the stepsize may be too large to effectively decrease the components of gradient corresponding to the first several largest eigenvalues, which, by (11), can be greatly reduced when small stepsizes are employed. In addition, it has been observed by many works in the recent literature that gradient methods using long and short stepsizes adaptively generally perform much better than those using only one type of stepsizes, for example see dai2003altermin ; de2014efficient ; di2018steplength ; gonzaga2016steepest ; huang2019gradient ; huang2019asymptotic . So, we would like to develop gradient methods that combines the two nonmonotone BB stepsizes with the short monotone stepsize given by (17).
We first extend the orthogonal property developed in Lemma 1 and the finite termination result given in Theorem 2.1.
Lemma 2 (Generalized orthogonal property)
Suppose that a gradient method (2) with stepsizes in the form of (8) is applied to minimize a quadratic function (4). In particular, at the -th and -th iteration, two stepsizes and are used, respectively, where and may be two different analytic functions used in (8). If satisfies
| (28) |
then we have
| (29) |
Proof
Based on Lemma 2 and using the same arguments as those in the proof of Theorem 2.1, we can obtain the following finite termination result even different function ’s are used in (8) to obtain the stepsizes.
Theorem 3.1 (Generalized finite termination)
Theorem 3.1 allows us to incorporate the nonmonotone BB stepsizes and , and the short monotone stepsize in one gradient method. Alternate or adaptive scheme has been employed for choosing long and short stepsizes in BB-type methods dai2005projected ; zhou2006gradient . And recent studies show that adaptive strategies are more preferred than the alternate scheme dhl2018 ; zhou2006gradient . Hence, we would like develop adaptive strategies to choose proper stepsizes for our new gradient methods. In particular, our adaptive nonmonotone gradient method (ANGM) takes the long BB stepsize when for some . Otherwise, a short stepsize or will be taken depending on the ratio . Notice that minimizes the gradient in the sense that
So, when for some , i.e. the gradient norm decreases, the previous stepsize is often a reasonable approximation of . By our numerical experiments, when BB method is applied the searches are often dominated in some two-dimensional subspaces. And the new gradient method in Theorem 3.1 would have finite convergence for minimizing two-dimensional quadratic function when the new stepsize is applied after some BB2 steps. Hence, our ANGM would employ the new monotone stepsize when ; otherwise, certain BB2 steps should be taken. In practice, we find that when , ANGM often has good performance by taking the stepsize . To summarize, our ANGM applies the following adaptive strategies for choosing stepsizes:
| (30) |
Notice that the calculation of needs to compute which is not easy to obtain when the objective function is not quadratic. In stead, the calculation of will just require , which is readily available even for general objective function. Moreover, it is found in recent research that gradient methods using retard stepsizes can often lead better performances friedlander1998gradient . Hence, in the first variant of ANGM, we simply replace in (30) by , i.e. the stepsizes are chosen as
| (31) |
We call the gradient method using stepsize (31) ANGR1. On the other hand, since the calculation of also needs and and by (26),
| (32) |
to simplify ANGR1, we may further replace in (31) by its upper bound in (32). As a result, we have the second variant of ANGM, which chooses stepsizes as
| (33) |
We call the gradient method using stepsize (33) ANGR2.
In terms of global convergence for minimizing quadratic function (4), by (26), we can easily show the -linear global convergence of ANGM since it satisfies the property in dai2003alternate . Similarly, -linear convergence of ANGR1 and ANGR2 can be also established. See the proof of Theorem 3 in dhl2018 for example.
Remark 1
Compared with other gradient methods, ANGM, ANGR1 and ANGR2 do not need additional matrix-vector products. In fact, it follows from (12) that , which gives
| (34) |
Hence, no additional matrix-vector products are needed for calculation of in , in and the stepsize used in ANGR2. Since the calculation of is necessary for the calculation of , in requires no additional matrix-vector products either. As for , it follows from and that
| (35) |
Thus, no additional matrix-vector products are required for calculation of in .
Remark 2
Notice that all the new methods, ANGM, ANGR1 and ANGR2, require the vector for calculation of their stepsizes. However, computing exactly from (12) maybe as difficult as minimizing the quadratic function. Notice that the satisfying (12) also satisfies the secant equation
| (36) |
Hence, we may find an approximation of by requiring the above secant condition holds. One efficient way to find such a satisfying the secant equation (36) is to simply treat the Hessian matrix as the diagonal matrix (9) and derive from (12), that is when ,
| (37) |
And we can just let , if . To summarize, the approximated can be computed by
| (38) |
As we will see in Section 4, this simple way of calculating leads very efficient algorithm.
For a simple illustration of numerical behavior of ANGR1, we again applied ANGR1 with and to solve problem (10) with . Fig. 2 shows the largest component of the gradient generated by BB1 and ANGR1 methods against the iteration number, where circle means the ANGR1 method takes the new stepsize at that iteration. It can be seen that generated by BB1 method often increases significantly with a much larger value at the iteration where the new stepsize is applied. On the other hand, generated by the ANGR1 method is often reduced and kept small after the new stepsize is applied. A detail correspondence of and is presented in Table 2, where is the total number of for which , . We can see from the last three columns in Table 2 that ANGR1 is much efficient than BB1 for decreasing those components of corresponding to large eigenvalues. Hence, the undesired behavior of BB1 discussed in the motivation Section 2.1 is greatly eliminated by ANGR1.

| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
|---|---|---|---|---|---|---|---|---|---|---|
| BB1 | 40 | 5 | 6 | 4 | 6 | 2 | 10 | 21 | 42 | 87 |
| ANGR1 | 51 | 4 | 22 | 18 | 16 | 4 | 1 | 8 | 12 | 17 |
3.2 Bound constrained case
In this subsection, we would like to extend ANGR1 and ANGR2 methods for solving the bound constrained optimization
| (39) |
where is Lipschitz continuously differentiable on the feasible set . Here, means componentwise for all . Clearly, when and for all , problem (39) reduces to the smooth unconstrained optimization.
Our methods will incorporate the gradient projection strategy and update the iterates as
with being a step length determined by some line searches and being the search direction given by
| (40) |
where is the Euclidean projection onto and is our proposed stepsize.
It is well-known that the components of iterates generated by gradient descent methods corresponding to optimal solutions at the boundary will be finally unchanged when the problem is nondegenerate. Hence, in huang2019gradient , the authors suggest to use the following modified BB stepsizes for bound constrained optimization
| (41) |
where is given by
| (42) |
Notice that . We will also do this modifications for solving bound constrained optimization and replace the two BB stepsizes in our new methods by and .
As mentioned before, we expect to get short steps using our new stepsizes. Since (32) may not hold for general functions, we would impose as a safeguard. As a result, our ANGR1 and ANGR2 methods for solving bound constrained optimization employ the following stepsizes:
| (43) |
and
| (44) |
respectively, where , , and .
The overall algorithm of ANGR1 and ANGR2 for solving bound constrained optimization (39) are given in Algorithm 1, where the adaptive nonmonotone line search by Dai and Zhang dai2001adaptive is employed to ensure global convergence and achieve better numerical performance. In particular, the step length is accepted if
| (45) |
where is the so-called reference function value and is adaptively updated by the rules given in dai2001adaptive and is a line search parameter. Once (45) is not accepted, it will perform an Armijo-type back tracking line search to find the step length such that
| (46) |
where is the maximal function value in recent iterations, i.e.,
This nonmonotone line search is observed specially suitable for BB-type methods dai2001adaptive . Moreover, under standard assumptions, Algorithm 1 ensures convergence in the sense that , see hager2006new .
4 Numerical results
In this section, we present numerical comparisons of ANGM, ANGR1, ANGR2 with some recent very successful gradient descent methods on solving quadratic, general unconstrained and bound constrained problems. All the comparison methods were implemented in Matlab (v.9.0-R2016a) and run on a laptop with an Intel Core i7, 2.9 GHz processor and 8 GB of RAM running Windows 10 system.
4.1 Quadratic problems
In this subsection, we compare ANGM, ANGR1 and ANGR2 with the BB1 barzilai1988two , DY dai2005analysis , ABBmin2 frassoldati2008new , and SDC de2014efficient methods on solving quadratic optimization problems.
We first solve some randomly generated quadratic problems from yuan2006new . Particularly, we solve
| (47) |
where is randomly generated with components between and , is a diagonal matrix with and , and , , are generated by the rand function between 1 and .
| Problem | Spectrum |
|---|---|
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
We have tested five sets of problems (47) with using different spectral distributions of the Hessian listed in Table 3. The algorithm is stopped once the number of iteration exceeds 20,000 or the gradient norm is reduced by a factor of , which is set to and , respectively. Three different condition numbers and are tested. For each value of or , 10 instances of the problem are randomly generated and the averaged results obtained by the starting point are presented. For the ABBmin2 method, is set to 0.9 as suggested in frassoldati2008new . The parameter pair of the SDC method is set to which is more efficient than other choices for this test. The is calculated by (38) for our methods.

| set | for ANGM | BB1 | DY | ABBmin2 | SDC | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | ||||||
| 1 | 1e-06 | 200.6 | 198.6 | 213.3 | 193.6 | 204.1 | 196.5 | 211.1 | 219.0 | 230.3 | 221.0 | 197.1 | 177.1 | 183.2 |
| 1e-09 | 665.0 | 678.1 | 677.5 | 937.3 | 718.7 | 768.5 | 1259.4 | 1198.1 | 1195.3 | 2590.0 | 2672.7 | 428.8 | 2029.6 | |
| 1e-12 | 939.7 | 941.6 | 901.5 | 1159.2 | 951.2 | 1043.7 | 1464.3 | 1339.0 | 1411.9 | 6032.9 | 6353.9 | 560.3 | 4087.2 | |
| 2 | 1e-06 | 140.3 | 140.2 | 143.1 | 161.2 | 172.8 | 171.1 | 217.3 | 265.8 | 310.3 | 311.2 | 261.5 | 302.5 | 160.6 |
| 1e-09 | 546.1 | 590.5 | 641.1 | 779.5 | 850.5 | 891.9 | 1055.7 | 1161.3 | 1299.0 | 1665.4 | 1340.0 | 1321.1 | 735.1 | |
| 1e-12 | 895.1 | 1025.2 | 1098.1 | 1328.6 | 1446.6 | 1598.2 | 1739.6 | 1908.7 | 2107.0 | 2820.8 | 2434.6 | 2267.5 | 1346.8 | |
| 3 | 1e-06 | 163.2 | 170.1 | 177.3 | 193.3 | 216.7 | 231.1 | 283.3 | 318.4 | 363.9 | 388.4 | 329.4 | 356.3 | 235.5 |
| 1e-09 | 566.5 | 640.0 | 680.7 | 811.0 | 970.8 | 986.0 | 1188.3 | 1218.7 | 1364.4 | 1783.1 | 1511.8 | 1470.8 | 818.1 | |
| 1e-12 | 928.4 | 1030.0 | 1163.7 | 1412.0 | 1575.2 | 1733.2 | 1973.6 | 2075.2 | 2191.1 | 2977.7 | 2780.2 | 2288.4 | 1310.6 | |
| 4 | 1e-06 | 212.3 | 213.7 | 237.1 | 259.0 | 254.7 | 291.8 | 365.3 | 431.4 | 475.1 | 500.5 | 431.3 | 519.0 | 262.8 |
| 1e-09 | 616.1 | 655.7 | 759.7 | 885.5 | 956.4 | 1107.9 | 1232.4 | 1405.3 | 1533.3 | 1859.4 | 1659.9 | 1489.5 | 805.5 | |
| 1e-12 | 996.0 | 1078.4 | 1250.9 | 1452.1 | 1629.5 | 1786.8 | 2041.6 | 2179.0 | 2427.6 | 3051.5 | 2785.4 | 2383.9 | 1469.3 | |
| 5 | 1e-06 | 623.1 | 654.8 | 663.4 | 671.0 | 683.4 | 697.2 | 761.3 | 813.7 | 931.0 | 832.5 | 650.8 | 816.0 | 668.3 |
| 1e-09 | 2603.0 | 2654.7 | 2847.6 | 2901.4 | 2936.9 | 3161.7 | 3228.6 | 3306.4 | 3807.2 | 4497.2 | 3185.5 | 2929.7 | 3274.5 | |
| 1e-12 | 4622.7 | 4675.2 | 4905.9 | 4634.2 | 4818.7 | 4944.7 | 5224.0 | 5480.7 | 5972.1 | 7446.7 | 7024.1 | 4808.7 | 5816.6 | |
| total | 1e-06 | 1339.5 | 1377.5 | 1434.2 | 1478.1 | 1531.7 | 1587.7 | 1838.3 | 2048.4 | 2310.6 | 2253.7 | 1870.1 | 2170.9 | 1510.4 |
| 1e-09 | 4996.7 | 5219.0 | 5606.6 | 6314.7 | 6433.3 | 6916.0 | 7964.4 | 8289.7 | 9199.2 | 12395.0 | 10370.0 | 7640.0 | 7662.7 | |
| 1e-12 | 8382.0 | 8750.3 | 9320.1 | 9986.1 | 10421.3 | 11106.5 | 12443.0 | 12982.6 | 14109.7 | 22329.5 | 21378.3 | 12308.9 | 14030.4 | |
| set | for ANGR1 | BB1 | DY | ABBmin2 | SDC | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | ||||||
| 1 | 1e-06 | 198.7 | 185.8 | 188.1 | 182.5 | 189.2 | 188.2 | 184.5 | 200.1 | 214.1 | 221.0 | 197.1 | 177.1 | 183.2 |
| 1e-09 | 655.5 | 641.6 | 625.4 | 667.9 | 621.7 | 680.9 | 762.7 | 811.5 | 1012.2 | 2590.0 | 2672.7 | 428.8 | 2029.6 | |
| 1e-12 | 897.3 | 854.7 | 844.5 | 838.4 | 775.2 | 813.1 | 917.4 | 984.7 | 1172.7 | 6032.9 | 6353.9 | 560.3 | 4087.2 | |
| 2 | 1e-06 | 137.9 | 119.0 | 119.2 | 118.7 | 115.3 | 124.5 | 152.4 | 157.5 | 178.9 | 311.2 | 261.5 | 302.5 | 160.6 |
| 1e-09 | 466.5 | 470.9 | 487.2 | 512.0 | 540.2 | 589.9 | 672.6 | 691.0 | 722.3 | 1665.4 | 1340.0 | 1321.1 | 735.1 | |
| 1e-12 | 788.1 | 783.3 | 802.1 | 835.3 | 908.1 | 1004.5 | 1074.2 | 1110.3 | 1215.2 | 2820.8 | 2434.6 | 2267.5 | 1346.8 | |
| 3 | 1e-06 | 164.5 | 149.6 | 146.3 | 153.0 | 157.8 | 166.8 | 183.3 | 208.9 | 229.1 | 388.4 | 329.4 | 356.3 | 235.5 |
| 1e-09 | 507.5 | 473.0 | 516.6 | 541.2 | 563.3 | 609.0 | 682.5 | 747.2 | 850.5 | 1783.1 | 1511.8 | 1470.8 | 818.1 | |
| 1e-12 | 818.3 | 801.5 | 865.4 | 894.4 | 965.4 | 1046.0 | 1108.8 | 1200.2 | 1419.8 | 2977.7 | 2780.2 | 2288.4 | 1310.6 | |
| 4 | 1e-06 | 189.7 | 172.2 | 168.8 | 179.6 | 195.2 | 212.7 | 229.4 | 262.9 | 282.1 | 500.5 | 431.3 | 519.0 | 262.8 |
| 1e-09 | 539.0 | 519.2 | 558.7 | 570.2 | 617.1 | 689.6 | 786.3 | 853.1 | 901.8 | 1859.4 | 1659.9 | 1489.5 | 805.5 | |
| 1e-12 | 849.0 | 851.1 | 894.2 | 934.8 | 1011.8 | 1065.5 | 1197.3 | 1291.8 | 1408.0 | 3051.5 | 2785.4 | 2383.9 | 1469.3 | |
| 5 | 1e-06 | 625.7 | 587.6 | 600.1 | 583.1 | 614.2 | 632.2 | 675.8 | 726.9 | 769.0 | 832.5 | 650.8 | 816.0 | 668.3 |
| 1e-09 | 2539.9 | 2518.1 | 2612.7 | 2530.4 | 2636.0 | 2581.2 | 2773.6 | 2875.2 | 3026.2 | 4497.2 | 3185.5 | 2929.7 | 3274.5 | |
| 1e-12 | 4207.3 | 4238.2 | 4292.4 | 4256.2 | 4240.7 | 4285.1 | 4397.2 | 4534.8 | 4729.0 | 7446.7 | 7024.1 | 4808.7 | 5816.6 | |
| total | 1e-06 | 1316.5 | 1214.1 | 1222.6 | 1217.0 | 1271.8 | 1324.5 | 1425.3 | 1556.4 | 1673.1 | 2253.7 | 1870.1 | 2170.9 | 1510.4 |
| 1e-09 | 4708.5 | 4622.7 | 4800.7 | 4821.7 | 4978.4 | 5150.6 | 5677.7 | 5977.9 | 6512.9 | 12395.0 | 10370.0 | 7640.0 | 7662.7 | |
| 1e-12 | 7560.1 | 7528.8 | 7698.7 | 7759.1 | 7901.3 | 8214.1 | 8694.9 | 9121.9 | 9944.7 | 22329.5 | 21378.3 | 12308.9 | 14030.4 | |
We compared the algorithms by using the performance profiles of Dolan and Moré dolan2002 on iteration metric. In these performance profiles, the vertical axis shows the percentage of the problems the method solves within the factor of the metric used by the most effective method in this comparison. Fig. 3 shows the performance profiles of ANGM, ANGR1 and ANGR2 obtained by setting , and other four compared methods. Clearly, ANGR2 outperforms all other methods. In general, we can see ANGM, ANGR1 and ANGR2 are much better than the BB1, DY and SDC methods.
To further analyze the performance of our methods, we present results of them with different values of from 0.1 to 0.9 in Tables 4, 5 and 6. From Table 4, we can see that, for the first problem set, ANGM is much faster than the BB1, DY and SDC methods, and competitive with the ABBmin2 method. As for the other four problem sets, ANGM method with a small value of outperforms the other compared methods though its performance seems to become worse as increases. The results shown in Tables 5 and 6 are slightly different from those in Table 4. In particular, ANGR1 and ANGR2 outperform other four compared methods for most of the problem sets and values of . For each given and tolerance level, ANGR1 and ANGR2 always perform better than other methods in terms of total number of iterations.
| set | for ANGR2 | BB1 | DY | ABBmin2 | SDC | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | ||||||
| 1 | 1e-06 | 196.9 | 191.8 | 184.8 | 186.8 | 183.3 | 189.0 | 175.6 | 182.2 | 189.5 | 221.0 | 197.1 | 177.1 | 183.2 |
| 1e-09 | 591.0 | 607.8 | 599.4 | 613.3 | 669.5 | 699.6 | 704.0 | 763.6 | 1005.1 | 2590.0 | 2672.7 | 428.8 | 2029.6 | |
| 1e-12 | 870.4 | 811.3 | 763.1 | 790.7 | 800.0 | 881.4 | 844.8 | 971.0 | 1146.5 | 6032.9 | 6353.9 | 560.3 | 4087.2 | |
| 2 | 1e-06 | 129.7 | 117.6 | 115.0 | 111.9 | 114.6 | 116.3 | 140.6 | 146.9 | 164.4 | 311.2 | 261.5 | 302.5 | 160.6 |
| 1e-09 | 455.4 | 474.8 | 470.8 | 491.4 | 530.6 | 566.0 | 595.9 | 601.8 | 691.5 | 1665.4 | 1340.0 | 1321.1 | 735.1 | |
| 1e-12 | 786.0 | 750.5 | 811.7 | 819.3 | 938.1 | 908.4 | 1000.3 | 1008.5 | 1089.0 | 2820.8 | 2434.6 | 2267.5 | 1346.8 | |
| 3 | 1e-06 | 156.2 | 141.2 | 136.3 | 149.7 | 146.7 | 167.9 | 179.9 | 188.0 | 206.8 | 388.4 | 329.4 | 356.3 | 235.5 |
| 1e-09 | 495.8 | 465.6 | 490.4 | 529.0 | 530.8 | 606.4 | 667.6 | 718.5 | 726.6 | 1783.1 | 1511.8 | 1470.8 | 818.1 | |
| 1e-12 | 809.0 | 775.1 | 796.4 | 876.6 | 918.8 | 997.0 | 1080.8 | 1130.1 | 1157.8 | 2977.7 | 2780.2 | 2288.4 | 1310.6 | |
| 4 | 1e-06 | 183.2 | 168.0 | 164.9 | 166.9 | 180.9 | 195.7 | 219.8 | 234.2 | 225.3 | 500.5 | 431.3 | 519.0 | 262.8 |
| 1e-09 | 516.2 | 521.9 | 523.2 | 541.6 | 603.9 | 637.3 | 700.0 | 709.8 | 739.2 | 1859.4 | 1659.9 | 1489.5 | 805.5 | |
| 1e-12 | 842.6 | 830.1 | 845.8 | 899.5 | 959.4 | 1039.2 | 1099.3 | 1133.9 | 1192.2 | 3051.5 | 2785.4 | 2383.9 | 1469.3 | |
| 5 | 1e-06 | 611.7 | 580.5 | 605.4 | 594.8 | 586.2 | 605.1 | 659.3 | 644.1 | 653.1 | 832.5 | 650.8 | 816.0 | 668.3 |
| 1e-09 | 2472.7 | 2394.4 | 2510.8 | 2504.4 | 2447.2 | 2502.1 | 2551.9 | 2648.6 | 2763.9 | 4497.2 | 3185.5 | 2929.7 | 3274.5 | |
| 1e-12 | 4122.4 | 4108.7 | 4103.2 | 4107.2 | 4161.8 | 4227.9 | 4363.6 | 4324.0 | 4483.7 | 7446.7 | 7024.1 | 4808.7 | 5816.6 | |
| total | 1e-06 | 1277.8 | 1199.1 | 1206.3 | 1210.1 | 1211.6 | 1274.0 | 1375.2 | 1395.4 | 1439.1 | 2253.7 | 1870.1 | 2170.9 | 1510.4 |
| 1e-09 | 4531.1 | 4464.5 | 4594.7 | 4679.7 | 4781.9 | 5011.5 | 5219.4 | 5442.3 | 5926.3 | 12395.0 | 10370.0 | 7640.0 | 7662.7 | |
| 1e-12 | 7430.3 | 7275.7 | 7320.2 | 7493.4 | 7778.1 | 8053.8 | 8388.8 | 8567.6 | 9069.2 | 22329.5 | 21378.3 | 12308.9 | 14030.4 | |
Secondly, we compared the methods on solving the non-rand quadratic problem (10) with . For ANGM, ANGR1 and ANGR2, and were set to 0.4 and 1, respectively. The parameter pair used for the SDC method was set to . Other settings are the same as above. Table 7 presents averaged number of iterations over 10 different starting points with entries randomly generated in . It can be seen that ANGM, ANGR1 and ANGR2 are significantly better than the BB1 and DY methods. In addition, ANGR1 and ANGR2 often outperform the ABBmin2 and SDC methods while ANGM is very competitive with them.
| BB1 | DY | ABBmin2 | SDC | ANGM | ANGR1 | ANGR2 | ||
|---|---|---|---|---|---|---|---|---|
| 1e-06 | 626.8 | 527.7 | 513.0 | 597.1 | 539.1 | 500.6 | 512.1 | |
| 1e-09 | 1267.0 | 972.1 | 894.5 | 1000.6 | 976.7 | 893.7 | 890.2 | |
| 1e-12 | 1741.9 | 1396.8 | 1277.8 | 1409.2 | 1399.1 | 1298.0 | 1257.4 | |
| 1e-06 | 1597.8 | 1326.7 | 1266.3 | 1254.3 | 1209.7 | 1046.0 | 1127.9 | |
| 1e-09 | 3687.5 | 3168.3 | 2559.8 | 2647.4 | 2605.2 | 2424.3 | 2399.8 | |
| 1e-12 | 5564.8 | 4892.4 | 3895.0 | 4156.4 | 4139.0 | 3858.5 | 3663.3 | |
| 1e-06 | 4060.9 | 2159.4 | 3130.2 | 1986.2 | 2112.9 | 1992.0 | 1936.0 | |
| 1e-09 | 10720.4 | 10134.3 | 7560.8 | 7178.5 | 7381.1 | 6495.1 | 6550.1 | |
| 1e-12 | 17805.5 | 18015.6 | 12193.6 | 11646.7 | 11922.9 | 10364.9 | 10280.2 | |
| total | 1e-06 | 6285.5 | 4013.8 | 4909.5 | 3837.6 | 3861.7 | 3538.6 | 3576.0 |
| 1e-09 | 15674.9 | 14274.7 | 11015.1 | 10826.5 | 10963.0 | 9813.1 | 9840.1 | |
| 1e-12 | 25112.2 | 24304.8 | 17366.4 | 17212.3 | 17461.0 | 15521.4 | 15200.9 |
Finally, we compared the methods on solving two large-scale real problems Laplace1(a) and Laplace1(b) described in fletcher2005barzilai . The two problems require the solution of a system of linear equations derived from a 3D Laplacian on a box, discretized using a standard 7-point finite difference stencil. Each problem has variables with being the number of interior nodes taken in each coordinate direction. The solution is fixed by a Gaussian function centered at and multiplied by . The parameter is used to control the rate of decay of the Gaussian. See fletcher2005barzilai for more details on these problems. Here, we set the parameters as follows:
The null vector was used as the starting point. We again stop the iteration when with different values of .
For ANGM, ANGR1 and ANGR2, and were set to 0.7 and 1.2, respectively. The parameter pair used for the SDC method was chosen for the best performance in our test, i.e., and for Laplace1(a) and Laplace1(b), respectively. Other settings are the same as above. The number of iterations required by the compared methods for solving the two problems are listed in Table 8. It can be seen that our methods are significantly better than the BB1, DY and SDC methods and is often faster than ABBmin2 especially when a tight tolerance is used.
| BB1 | DY | ABBmin2 | SDC | ANGM | ANGR1 | ANGR2 | ||
| Laplace1(a) | ||||||||
| 1e-06 | 259 | 249 | 192 | 213 | 245 | 195 | 233 | |
| 1e-09 | 441 | 373 | 329 | 393 | 313 | 322 | 308 | |
| 1e-12 | 680 | 546 | 401 | 529 | 367 | 373 | 364 | |
| 1e-06 | 359 | 383 | 289 | 297 | 291 | 332 | 288 | |
| 1e-09 | 591 | 570 | 430 | 553 | 408 | 446 | 396 | |
| 1e-12 | 882 | 789 | 608 | 705 | 620 | 516 | 591 | |
| 1e-06 | 950 | 427 | 351 | 513 | 450 | 303 | 416 | |
| 1e-09 | 1088 | 651 | 485 | 609 | 584 | 519 | 503 | |
| 1e-12 | 1241 | 918 | 687 | 825 | 694 | 604 | 597 | |
| total | 1e-06 | 1568 | 1059 | 832 | 1023 | 986 | 830 | 937 |
| 1e-09 | 2120 | 1594 | 1244 | 1555 | 1305 | 1287 | 1207 | |
| 1e-12 | 2803 | 2253 | 1696 | 2059 | 1681 | 1493 | 1552 | |
| Laplace1(b) | ||||||||
| 1e-06 | 246 | 236 | 217 | 213 | 242 | 217 | 214 | |
| 1e-09 | 473 | 399 | 365 | 437 | 333 | 338 | 409 | |
| 1e-12 | 651 | 532 | 502 | 555 | 451 | 478 | 573 | |
| 1e-06 | 288 | 454 | 294 | 309 | 296 | 290 | 324 | |
| 1e-09 | 607 | 567 | 433 | 485 | 517 | 499 | 495 | |
| 1e-12 | 739 | 794 | 634 | 766 | 686 | 590 | 645 | |
| 1e-06 | 544 | 371 | 369 | 379 | 381 | 406 | 358 | |
| 1e-09 | 646 | 700 | 585 | 653 | 638 | 558 | 648 | |
| 1e-12 | 937 | 1038 | 880 | 965 | 854 | 785 | 810 | |
| total | 1e-06 | 1078 | 1061 | 880 | 901 | 919 | 913 | 896 |
| 1e-09 | 1726 | 1666 | 1383 | 1575 | 1488 | 1395 | 1552 | |
| 1e-12 | 2327 | 2364 | 2016 | 2286 | 1991 | 1853 | 2028 | |
4.2 Unconstrained problems
Now we present comparisons of ANGR1 and ANGR2 with SPG method111codes available at https://www.ime.usp.br/~egbirgin/tango/codes.php in birgin2000nonmonotone ; birgin2014spectral , and the BB1 method using Dai-Zhang nonmonotone line search dai2001adaptive (BB1-DZ) on solving general unconstrained problems.
For our methods, the parameter values are set as the following:
In addition, the parameter and for ANGR1 and ANGR2 are set to 0.8 and 1.2, respectively. Default parameters were used for SPG. Each method was stopped if the number of iteration exceeds 200,000 or .
Our test problems were taken from andrei2008unconstrained . We have tested 59 problems listed in Table 9 with and the performance profiles are shown in Fig. 4, which shows that ANGR1 and ANGR2 outperform SPG and BB1-DZ in terms of the iteration number, and ANGR2 is faster than ANGR1. Moreover, BB1-DZ is slightly better than SPG. Detail numerical results are also presented in Table 10. Since the only difference between BB1-DZ with ANGR1 and ANGR2 lies in the choice of stepsizes, these numerical results show our adaptive choices of stepsizes in ANGR1 and ANGR2 are very effective and can indeed greatly accelerate the convergence of BB-type methods.
| Problem | name | Problem | name |
|---|---|---|---|
| 1 | Extended Freudenstein & Roth function | 31 | NONDIA |
| 2 | Extended Trigonometric | 32 | DQDRTIC |
| 3 | Extended White & Holst | 33 | Partial Perturbed Quadratic |
| 4 | Extended Beale | 34 | Broyden Tridiagonal |
| 5 | Extended Penalty | 35 | Almost Perturbed Quadratic |
| 6 | Perturbed Quadratic | 36 | Perturbed Tridiagonal Quadratic |
| 7 | Raydan 1 | 37 | Staircase 1 |
| 8 | Raydan 2 | 38 | Staircase 2 |
| 9 | Diagonal 1 | 39 | LIARWHD |
| 10 | Diagonal 2 | 40 | POWER |
| 11 | Diagonal 3 | 41 | ENGVAL1 |
| 12 | Hager | 42 | EDENSCH |
| 13 | Generalized Tridiagonal 1 | 43 | BDEXP |
| 14 | Extended Tridiagonal 1 | 44 | GENHUMPS |
| 15 | Extended TET | 45 | NONSCOMP |
| 16 | Generalized Tridiagonal 2 | 46 | VARDIM |
| 17 | Diagonal 4 | 47 | QUARTC |
| 18 | Diagonal 5 | 48 | Extended DENSCHNB |
| 19 | Extended Himmelblau | 49 | Extended DENSCHNF |
| 20 | Extended PSC1 | 50 | LIARWHD |
| 21 | Generalized PSC1 | 51 | BIGGSB1 |
| 22 | Extended Powell | 52 | Generalized Quartic |
| 23 | Extended Cliff | 53 | Diagonal 7 |
| 24 | Perturbed quadratic diagonal | 54 | Diagonal 8 |
| 25 | Quadratic QF1 | 55 | Full Hessian FH3 |
| 26 | Extended quadratic exponential EP1 | 56 | SINCOS |
| 27 | Extended Tridiagonal 2 | 57 | Diagonal 9 |
| 28 | BDQRTIC | 58 | HIMMELBG |
| 29 | TRIDIA | 59 | HIMMELH |
| 30 | ARWHEAD |

| Problem | SPG | BB1-DZ | ANGR1 | ANGR2 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| iter | iter | iter | iter | |||||||||
| 1 | 87 | 2.45e+04 | 8.95e-07 | 41 | 2.45e+04 | 4.06e-08 | 26 | 2.45e+04 | 1.46e-07 | 25 | 2.45e+04 | 1.46e-07 |
| 2 | 45 | 5.72e-13 | 3.83e-07 | 87 | 5.26e-07 | 3.97e-07 | 100 | 4.89e-07 | 9.32e-07 | 100 | 4.73e-07 | 2.20e-07 |
| 3 | 110 | 5.80e-14 | 3.05e-08 | 120 | 6.30e-20 | 4.95e-11 | 91 | 9.95e-12 | 2.93e-07 | 88 | 1.05e-11 | 2.90e-07 |
| 4 | 46 | 3.92e-10 | 6.57e-07 | 65 | 8.28e-18 | 3.74e-10 | 31 | 9.52e-15 | 4.15e-08 | 31 | 1.94e-12 | 6.12e-08 |
| 5 | 41 | 8.83e+02 | 9.02e-07 | 107 | 8.83e+02 | 1.24e-08 | 107 | 8.83e+02 | 1.24e-08 | 107 | 8.83e+02 | 1.24e-08 |
| 6 | 597 | 2.39e-13 | 9.83e-07 | 457 | 2.16e-13 | 9.24e-07 | 300 | 7.98e-16 | 5.66e-08 | 287 | 1.69e-13 | 8.03e-07 |
| 7 | 465 | 5.01e+04 | 9.64e-07 | 339 | 5.01e+04 | 9.04e-07 | 330 | 5.01e+04 | 5.56e-08 | 301 | 5.01e+04 | 8.39e-07 |
| 8 | 1 | 1.00e+03 | 0.00e+00 | 1 | 1.00e+03 | 0.00e+00 | 1 | 1.00e+03 | 0.00e+00 | 1 | 1.00e+03 | 0.00e+00 |
| 9 | 415 | -2.71e+06 | 8.50e-07 | 361 | -2.71e+06 | 5.43e-07 | 294 | -2.71e+06 | 9.05e-07 | 276 | -2.71e+06 | 7.04e-07 |
| 10 | 168 | 3.13e+01 | 6.05e-07 | 173 | 3.13e+01 | 5.68e-07 | 135 | 3.13e+01 | 5.93e-07 | 131 | 3.13e+01 | 8.61e-07 |
| 11 | 668 | -4.96e+05 | 8.82e-07 | 404 | -4.96e+05 | 8.63e-07 | 336 | -4.96e+05 | 8.85e-07 | 286 | -4.96e+05 | 9.93e-07 |
| 12 | 63 | -4.47e+04 | 2.91e-07 | 58 | -4.47e+04 | 5.70e-07 | 52 | -4.47e+04 | 5.14e-07 | 52 | -4.47e+04 | 5.59e-07 |
| 13 | 29 | 9.97e+02 | 6.53e-07 | 27 | 9.97e+02 | 9.67e-07 | 26 | 9.97e+02 | 4.21e-07 | 25 | 9.97e+02 | 9.79e-07 |
| 14 | 30 | 2.13e-07 | 3.75e-07 | 18 | 2.68e-07 | 4.46e-07 | 20 | 5.20e-07 | 7.33e-07 | 20 | 5.20e-07 | 7.33e-07 |
| 15 | 10 | 1.28e+03 | 4.34e-10 | 5 | 1.28e+03 | 1.33e-08 | 5 | 1.28e+03 | 1.33e-08 | 5 | 1.28e+03 | 1.33e-08 |
| 16 | 69 | 2.38e+00 | 8.58e-07 | 58 | 9.58e-01 | 7.14e-07 | 56 | 9.58e-01 | 8.40e-07 | 57 | 9.58e-01 | 6.13e-07 |
| 17 | 3 | 0.00e+00 | 0.00e+00 | 3 | 0.00e+00 | 0.00e+00 | 3 | 0.00e+00 | 0.00e+00 | 3 | 0.00e+00 | 0.00e+00 |
| 18 | 4 | 6.93e+02 | 4.81e-08 | 1 | 6.93e+02 | 0.00e+00 | 1 | 6.93e+02 | 0.00e+00 | 1 | 6.93e+02 | 0.00e+00 |
| 19 | 15 | 4.21e-19 | 1.92e-10 | 15 | 4.21e-19 | 1.92e-10 | 15 | 4.21e-19 | 1.92e-10 | 15 | 4.21e-19 | 1.92e-10 |
| 20 | 23 | 9.99e+02 | 8.27e-07 | 22 | 9.99e+02 | 8.65e-07 | 22 | 9.99e+02 | 8.65e-07 | 22 | 9.99e+02 | 8.65e-07 |
| 21 | 15 | 3.87e+02 | 5.87e-07 | 13 | 3.87e+02 | 3.78e-07 | 13 | 3.87e+02 | 3.78e-07 | 13 | 3.87e+02 | 3.78e-07 |
| 22 | 246 | 3.19e-07 | 6.80e-07 | 266 | 3.67e-07 | 5.97e-07 | 164 | 7.08e-07 | 9.62e-07 | 205 | 5.55e-07 | 9.82e-07 |
| 23 | 154 | 9.99e+01 | 7.79e-07 | 126 | 9.99e+01 | 1.57e-07 | 541 | 9.99e+01 | 2.61e-07 | 539 | 9.99e+01 | 6.10e-08 |
| 24 | 373 | 2.41e-11 | 8.95e-07 | 246 | 1.41e-11 | 6.83e-07 | 249 | 2.05e-12 | 2.98e-07 | 314 | 4.05e-12 | 4.14e-07 |
| 25 | 612 | -5.00e-04 | 9.45e-07 | 575 | -5.00e-04 | 9.95e-07 | 319 | -5.00e-04 | 8.92e-08 | 282 | -5.00e-04 | 7.45e-07 |
| 26 | 4 | 7.93e+03 | 4.19e-08 | 4 | 7.93e+03 | 3.71e-09 | 4 | 7.93e+03 | 3.71e-09 | 4 | 7.93e+03 | 3.71e-09 |
| 27 | 34 | 3.89e+02 | 7.50e-07 | 39 | 3.89e+02 | 9.74e-07 | 36 | 3.89e+02 | 8.49e-07 | 36 | 3.89e+02 | 5.15e-07 |
| 28 | 77 | 3.98e+03 | 7.64e-07 | 98 | 3.98e+03 | 8.91e-07 | 69 | 3.98e+03 | 1.49e-07 | 64 | 3.98e+03 | 9.57e-07 |
| 29 | 3910 | 2.47e-13 | 6.97e-07 | 2403 | 9.93e-15 | 6.71e-07 | 816 | 9.62e-16 | 4.67e-07 | 611 | 6.71e-14 | 5.86e-07 |
| 30 | 4 | 0.00e+00 | 1.50e-09 | 4 | 0.00e+00 | 1.50e-09 | 4 | 0.00e+00 | 1.50e-09 | 4 | 0.00e+00 | 1.50e-09 |
| 31 | 15 | 1.35e-14 | 9.86e-09 | 15 | 1.35e-14 | 9.86e-09 | 16 | 1.10e-12 | 8.20e-08 | 16 | 1.10e-12 | 8.20e-08 |
| 32 | 41 | 4.20e-16 | 2.86e-07 | 26 | 1.80e-13 | 8.47e-07 | 17 | 2.99e-16 | 2.14e-07 | 17 | 2.99e-16 | 2.14e-07 |
| 33 | 312 | 2.51e-14 | 5.96e-07 | 229 | 1.42e-13 | 9.63e-07 | 257 | 6.00e-15 | 2.16e-07 | 294 | 7.03e-14 | 8.24e-07 |
| 34 | 47 | 5.31e-15 | 3.20e-07 | 51 | 7.94e-14 | 8.28e-07 | 41 | 7.67e-14 | 7.35e-07 | 47 | 2.62e-14 | 7.66e-07 |
| 35 | 621 | 2.36e-13 | 9.76e-07 | 363 | 2.47e-13 | 9.97e-07 | 358 | 1.53e-13 | 7.77e-07 | 272 | 4.53e-15 | 6.22e-07 |
| 36 | 595 | 2.49e-13 | 9.97e-07 | 606 | 2.48e-13 | 9.95e-07 | 368 | 3.46e-13 | 1.00e-06 | 306 | 1.82e-13 | 8.61e-07 |
| 37 | 15936 | 1.81e-12 | 7.80e-07 | 10239 | 1.54e-12 | 7.68e-07 | 7234 | 1.39e-13 | 1.89e-07 | 6543 | 1.07e-12 | 9.13e-07 |
| 38 | 28528 | 1.97e-14 | 2.43e-07 | 25640 | 2.74e-12 | 9.97e-07 | 60283 | 2.86e-12 | 9.93e-07 | 27783 | 2.98e-12 | 9.74e-07 |
| 39 | 61 | 2.64e-14 | 2.06e-08 | 59 | 2.62e-13 | 4.93e-07 | 47 | 9.15e-14 | 6.15e-08 | 47 | 1.30e-12 | 2.36e-07 |
| 40 | 5435 | 2.84e-13 | 9.98e-07 | 5472 | 2.94e-13 | 9.98e-07 | 327 | 1.89e-13 | 6.99e-07 | 366 | 5.63e-13 | 9.98e-07 |
| 41 | 33 | 1.11e+03 | 8.58e-07 | 31 | 1.11e+03 | 8.09e-07 | 29 | 1.11e+03 | 1.70e-07 | 29 | 1.11e+03 | 1.70e-07 |
| 42 | 32 | 6.00e+03 | 7.33e-07 | 32 | 6.00e+03 | 7.33e-07 | 31 | 6.00e+03 | 4.46e-07 | 31 | 6.00e+03 | 9.35e-07 |
| 43 | 15 | 6.52e-05 | 9.93e-07 | 15 | 6.52e-05 | 9.93e-07 | 15 | 6.52e-05 | 9.93e-07 | 15 | 6.52e-05 | 9.93e-07 |
| 44 | 747 | 1.39e-17 | 1.50e-09 | 3 | 4.49e-23 | 3.00e-12 | 3 | 4.49e-23 | 3.00e-12 | 3 | 4.49e-23 | 3.00e-12 |
| 45 | 48 | 9.98e-12 | 8.75e-07 | 89 | 1.97e-14 | 2.57e-07 | 59 | 2.30e-13 | 5.85e-07 | 63 | 2.18e-13 | 7.89e-07 |
| 46 | 1 | 4.62e-30 | 4.44e-16 | 30 | 2.17e-27 | 5.77e-15 | 30 | 2.17e-27 | 5.77e-15 | 30 | 2.17e-27 | 5.77e-15 |
| 47 | 1 | 0.00e+00 | 0.00e+00 | 1 | 0.00e+00 | 0.00e+00 | 1 | 0.00e+00 | 0.00e+00 | 1 | 0.00e+00 | 0.00e+00 |
| 48 | 8 | 1.37e-11 | 4.68e-07 | 8 | 1.37e-11 | 4.68e-07 | 8 | 1.37e-11 | 4.68e-07 | 8 | 1.37e-11 | 4.68e-07 |
| 49 | 12 | 1.78e-19 | 4.76e-10 | 17 | 6.46e-21 | 5.91e-11 | 17 | 6.46e-21 | 5.91e-11 | 17 | 6.46e-21 | 5.91e-11 |
| 50 | 61 | 2.64e-14 | 2.06e-08 | 59 | 2.62e-13 | 4.93e-07 | 47 | 9.15e-14 | 6.15e-08 | 47 | 1.30e-12 | 2.36e-07 |
| 51 | 30459 | 1.24e-05 | 9.95e-07 | 14877 | 3.73e-07 | 6.46e-07 | 7558 | 6.51e-07 | 8.62e-07 | 8969 | 6.08e-12 | 6.45e-07 |
| 52 | 9 | 4.98e-15 | 1.99e-07 | 9 | 4.98e-15 | 1.99e-07 | 9 | 4.98e-15 | 1.99e-07 | 9 | 4.98e-15 | 1.99e-07 |
| 53 | 7 | -8.17e+02 | 1.97e-09 | 7 | -8.17e+02 | 1.97e-09 | 7 | -8.17e+02 | 1.97e-09 | 7 | -8.17e+02 | 1.97e-09 |
| 54 | 6 | -4.80e+02 | 5.85e-08 | 6 | -4.80e+02 | 4.36e-10 | 6 | -4.80e+02 | 4.36e-10 | 6 | -4.80e+02 | 4.36e-10 |
| 55 | 3 | -2.50e-01 | 4.56e-10 | 3 | -2.50e-01 | 4.56e-10 | 3 | -2.50e-01 | 4.56e-10 | 3 | -2.50e-01 | 4.56e-10 |
| 56 | 15 | 3.87e+02 | 5.87e-07 | 13 | 3.87e+02 | 3.78e-07 | 13 | 3.87e+02 | 3.78e-07 | 13 | 3.87e+02 | 3.78e-07 |
| 57 | 553 | -2.70e+06 | 1.91e-07 | 762 | -2.70e+06 | 6.06e-07 | 305 | -2.70e+06 | 9.96e-07 | 346 | -2.70e+06 | 5.60e-07 |
| 58 | 16 | 4.79e-04 | 8.77e-07 | 17 | 3.78e-04 | 6.91e-07 | 17 | 3.78e-04 | 6.91e-07 | 17 | 3.78e-04 | 6.91e-07 |
| 59 | 12 | -5.00e+02 | 1.09e-07 | 12 | -5.00e+02 | 7.41e-11 | 12 | -5.00e+02 | 7.41e-11 | 12 | -5.00e+02 | 7.41e-11 |
4.3 Bound constrained problems
We further compare ANGR1 and ANGR2, with SPG birgin2000nonmonotone ; birgin2014spectral and the BB1-DZ method dai2001adaptive combined with gradient projection techniques on solving bound constrained problems from the CUTEst collection gould2015cutest with dimension more than . We deleted problems from this list since none of these comparison algorithms can solve them. Hence, in total there are problems left in our test. The iteration was stopped if the number of iteration exceeds 200,000 or . The parameters and for ANGR1 and ANGR2 are set to 0.4 and 1.5, respectively. Other settings are the same as before. Fig. 5 shows the performance profiles of all the compared methods on iteration metric. Similar as the unconstrained case, from Fig. 5, we again see that both ANGR1 and ANGR2 perform significantly better than SPG and BB1-DZ. Hence, our new gradient methods also have potential great benefits for solving constrained optimization.

5 Conclusions
We have developed techniques to accelerate the Barzilai-Borwein (BB) method motivated from finite termination for minimizing two-dimensional strongly convex quadratic functions. More particularly, by exploiting certain orthogonal properties of the gradients, we derive a new monotone stepsize that can be combined with BB stepsizes to significantly improve their performance for minimizing general strongly convex quadratic functions. By adaptively using this new stepsize and the two BB stepsizes, we develop a new gradient method called ANGM and its two variants ANGR1 and ANGR2, which are further extended for solving unconstrained and bound constrained optimization. Our extensive numerical experiments show that all the new developed methods are significantly better than the BB method and are faster than some very successful gradient methods developed in the recent literature for solving quadratic, general smooth unconstrained and bound constrained optimization.
Acknowledgements.
This work was supported by the National Natural Science Foundation of China (Grant Nos. 11631013, 11701137, 11671116), the National 973 Program of China (Grant No. 2015CB856002), China Scholarship Council (No. 201806705007), and USA National Science Foundation (1522654, 1819161).References
- (1) Akaike, H.: On a successive transformation of probability distribution and its application to the analysis of the optimum gradient method. Ann. Inst. Stat. Math. 11(1), 1–16 (1959)
- (2) Andrei, N.: An unconstrained optimization test functions collection. Adv. Model. Optim. 10(1), 147–161 (2008)
- (3) Barzilai, J., Borwein, J.M.: Two-point step size gradient methods. IMA J. Numer. Anal. 8(1), 141–148 (1988)
- (4) Birgin, E.G., Martínez, J.M., Raydan, M.: Nonmonotone spectral projected gradient methods on convex sets. SIAM J. Optim. 10(4), 1196–1211 (2000)
- (5) Birgin, E.G., Martínez, J.M., Raydan, M.: Spectral projected gradient methods: review and perspectives. J. Stat. Softw. 60(3), 539–559 (2014)
- (6) Cauchy, A.: Méthode générale pour la résolution des systemes d équations simultanées. Comp. Rend. Sci. Paris 25, 536–538 (1847)
- (7) Dai, Y.H.: Alternate step gradient method. Optimization 52(4-5), 395–415 (2003)
- (8) Dai, Y.H., Fletcher, R.: Projected Barzilai–Borwein methods for large-scale box-constrained quadratic programming. Numer. Math. 100(1), 21–47 (2005)
- (9) Dai, Y.H., Huang, Y., Liu, X.W.: A family of spectral gradient methods for optimization. Comp. Optim. Appl. 74(1), 43–65 (2019)
- (10) Dai, Y.H., Liao, L.Z.: -linear convergence of the Barzilai and Borwein gradient method. IMA J. Numer. Anal. 22(1), 1–10 (2002)
- (11) Dai, Y.H., Yuan, Y.X.: Alternate minimization gradient method. IMA J. Numer. Anal. 23(3), 377–393 (2003)
- (12) Dai, Y.H., Yuan, Y.X.: Analysis of monotone gradient methods. J. Ind. Manag. Optim. 1(2), 181 (2005)
- (13) Dai, Y.H., Zhang, H.: Adaptive two-point stepsize gradient algorithm. Numer. Algorithms 27(4), 377–385 (2001)
- (14) De Asmundis, R., Di Serafino, D., Hager, W.W., Toraldo, G., Zhang, H.: An efficient gradient method using the yuan steplength. Comp. Optim. Appl. 59(3), 541–563 (2014)
- (15) Di Serafino, D., Ruggiero, V., Toraldo, G., Zanni, L.: On the steplength selection in gradient methods for unconstrained optimization. Appl. Math. Comput. 318, 176–195 (2018)
- (16) Dolan, E.D., Moré, J.J.: Benchmarking optimization software with performance profiles. Math. Program. 91(2), 201–213 (2002)
- (17) Fletcher, R.: On the Barzilai–Borwein method. In: Qi, L., Teo, K., Yang, X. (eds.) Optimization and Control with Applications. pp. 235–256. Springer, Boston, (2005)
- (18) Fletcher, R.: A limited memory steepest descent method. Math. Program. 135(1-2), 413–436 (2012)
- (19) Forsythe, G.E.: On the asymptotic directions of the s-dimensional optimum gradient method. Numer. Math. 11(1), 57–76 (1968)
- (20) Frassoldati, G., Zanni, L., Zanghirati, G.: New adaptive stepsize selections in gradient methods. J. Ind. Manag. Optim. 4(2), 299 (2008)
- (21) Friedlander, A., Martínez, J.M., Molina, B., Raydan, M.: Gradient method with retards and generalizations. SIAM J. Numer. Anal. 36(1), 275–289 (1998)
- (22) Gonzaga, C.C., Schneider, R.M.: On the steepest descent algorithm for quadratic functions. Comp. Optim. Appl. 63(2), 523–542 (2016)
- (23) Gould, N.I., Orban, D., Toint, P.L.: CUTEst: a constrained and unconstrained testing environment with safe threads for mathematical optimization. Comp. Optim. Appl. 60(3), 545–557 (2015)
- (24) Hager, W.W., Zhang, H.: A new active set algorithm for box constrained optimization. SIAM J. Optim. 17(2), 526–557 (2006)
- (25) Huang, Y., Dai, Y.H., Liu, X.W., Zhang, H.: Gradient methods exploiting spectral properties. arXiv preprint arXiv:1905.03870 (2019)
- (26) Huang, Y., Dai, Y.H., Liu, X.W., Zhang, H.: On the asymptotic convergence and acceleration of gradient methods. arXiv preprint arXiv:1908.07111 (2019)
- (27) Huang, Y., Liu, H., Zhou, S.: Quadratic regularization projected Barzilai–Borwein method for nonnegative matrix factorization. Data Min. Knowl. Disc. 29(6), 1665–1684 (2015)
- (28) Jiang, B., Dai, Y.H.: Feasible Barzilai–Borwein-like methods for extreme symmetric eigenvalue problems. Optim. Method Softw. 28(4), 756–784 (2013)
- (29) Liu, Y.F., Dai, Y.H., Luo, Z.Q.: Coordinated beamforming for miso interference channel: Complexity analysis and efficient algorithms. IEEE Trans. Signal Process. 59(3), 1142–1157 (2011)
- (30) Raydan, M.: The Barzilai and Borwein gradient method for the large scale unconstrained minimization problem. SIAM J. Optim. 7(1), 26–33 (1997)
- (31) Tan, C., Ma, S., Dai, Y.H., Qian, Y.: Barzilai–Borwein step size for stochastic gradient descent. In: Advances in Neural Information Processing Systems, pp. 685–693 (2016)
- (32) Wang, Y., Ma, S.: Projected Barzilai–Borwein method for large-scale nonnegative image restoration. Inverse Probl. Sci. En. 15(6), 559–583 (2007)
- (33) Wright, S.J., Nowak, R.D., Figueiredo, M.A.: Sparse reconstruction by separable approximation. IEEE Trans. Signal Process. 57(7), 2479–2493 (2009)
- (34) Yuan, Y.X.: A new stepsize for the steepest descent method. J. Comput. Math. 24(2), 149–156 (2006)
- (35) Yuan, Y.X.: Step-sizes for the gradient method. AMS IP Studies in Advanced Mathematics. 42(2), 785–796 (2008)
- (36) Zhou, B., Gao, L., Dai, Y.H.: Gradient methods with adaptive step-sizes. Comp. Optim. Appl. 35(1), 69–86 (2006)