On symmetric solutions of the fourth -Painlevé equation
Abstract.
The Painlevé equations possess transcendental solutions with special initial values that are symmetric under rotation or reflection in the complex -plane. They correspond to monodromy problems that are explicitly solvable in terms of classical special functions. In this paper, we show the existence of such solutions for a -difference Painlevé equation. We focus on symmetric solutions of a -difference equation known as or and provide their symmetry properties and solve the corresponding monodromy problem.
1. Introduction
Among the highly transcendental solutions of a Painlevé equation, there exist solutions with solvable monodromy [kitaev1991symmetrical, kaneko2005, pvisymmetric, okumura2007symmetric], often called symmetric solutions. For generic parameter values, they are neither classical special functions111These are defined by Umemura as solutions related to hypergeometric-type or rational functions under classical transformations. [umemura1998painleve] nor solutions characterized by distinctive asymptotic behaviours, such as the celebrated tritronquée solutions [jk:01]. In this paper, we show that symmetric solutions also exist for -difference Painlevé equations.
To be explicit, we focus on the -difference fourth Painlevé equation
where , , is given, is a function of and are constant parameters, subject to
| (1.1) |
is invariant under multiplication by , and . This equation is also known as in Sakai’s diagram [sakai2001].
We will focus on solutions of that are invariant under the following transformations.
Definition 1.1.
The following transformations are called discrete symmetries of :
| (1.2) |
i.e.,
We call a symmetric domain if it is invariant under . Furthermore, a solution of is called a symmetric solution if it is invariant under one of the above two symmetries.
We show that is invariant under transformation (1.2) in Section 2. It is important to note that the above symmetries do not arise as elements of the affine Weyl symmetry group usually associated with , but they turn out to correspond to one and the same automorphism of the corresponding Dynkin diagram. In particular, the symmetries are indistinguishable on the level of , but they do act distinctively on the corresponding Lax pair, which we introduce next.
The difference equation is associated to a linear problem (called a Lax pair) [joshinobu2016]
| (1.3a) | ||||
| (1.3b) | ||||
where and are matrix-valued functions given in Equations (3.2). The compatibility condition
| (1.4) |
is equivalent to the equation, along with a condition on the auxiliary variable given by
| (1.5) |
where is given by equation (3.3).
The linear problem (1.3a) gives rise to a Riemann-Hilbert problem (RHP). In a previous paper, we showed that this Riemann-Hilbert problem is uniquely solvable (under certain conditions) and proved the invertibility of the map between the linear problem and an algebraic surface, which is a -version of a monodromy surface [joshiroffelsenrhp]. Necessary notation is outlined in Appendix A.
The main result of this paper, Theorem 4.1, shows that solutions that are symmetric with respect to lead to an explicitly solvable monodromy problem at the point of reflection, with solutions built out of Jackson’s -Bessel functions of the second kind, , with and exponents . The construction of the monodromy surface breaks down at reflection points for the case of , because it violates the non-resonance conditions of the Riemann-Hilbert problem.
For the special choice of the parameters, , has a particularly simple solution, given by
which is symmetric with respect to both and . We show that the monodromy problem of this solution is solvable everywhere in the complex plane. This solution forms a seed solution for the family of -Okamoto rational solutions, introduced in Kajiwara et al. [kajiwaranoumiyamada2001]. In this paper, we provide the points on the monodromy surface corresponding to each member of this family.
1.1. Outline
The symmetric solutions and their derivations are described in detail in Section 2. The corresponding linear problem, connection matrix, and monodromy surface are considered in Section 3. In Section 4, we show that the monodromy problem for symmetric solutions is solvable at points of reflection. We consider symmetric solutions on open domains in Section 5, particularly focussing on the -Okamoto rational solutions, before providing a conclusion in Section 6.
2. Symmetric Solutions
In this section, we first show that remains invariant under the transformations given in Definition 1.1. Then, in Section 2.1, we show that the transformations formally converge to a transformation of the fourth Painlevé equation under the continuum limit. Finally, in Section 2.2, we classify solutions, symmetric with respect to .
To show that leave invariant, note that these transformations map
| (2.1) |
Taking in we obtain
Using Equations (2.1) to replace lower-case variables by upper-case variables, we find another instance of , with the same parameters.
Recall that has a symmetry group given by (see [joshinobushi2016, §4]). We note here that the transformations are not given by the generators of the reflection group , but are related to an automorphism of the corresponding Dynkin diagram. To be precise, they are equivalent to in [joshinobushi2016, §4.2].
2.1. and the continuum limit
In Kajiwara et al. [kajiwaranoumiyamada2001], it was shown that, upon setting
and taking the limit , formally converges to the symmetric fourth Painlevé equation
where
and denotes differentiation with respect to .
Note that the independent variable is given by
and satisfies
Thus, for ,
where
Therefore, in the continuum limit as , the symmetries of in Definition 1.1, formally converge to the following symmetry of ,
2.2. Symmetric Solutions
In this section, we restrict our attention to solutions with a domain given by a discrete -spiral, . For the symmetric transformations given in Definition 1.1, we require that , , leaves this spiral invariant. This gives us four possible values for , modulo , determined by
namely .
The formulation of the -monodromy surface described in Section 3 requires the non-resonance conditions
| (2.2) |
This leads to two possible values, . As is invariant under , we restrict ourselves to considering .
Definition 2.1.
We call a solution , , of symmetric if it is invariant under the transformation (2.3), i.e. if
| (2.4) |
Consider a symmetric solution , . Specialising equation (2.4) to , shows that satisfies , for . The only solutions to this equation are given by . Thus is regular at and
| (2.5) |
Combining this observation with
we are led to four possible initial conditions at ,
| (2.6) |
Conversely, any of these initial conditions yields a symmetric solution of . To see this, recall that equation (2.3) yields, in general, another solution of . Due to (2.5), and satisfy the same initial conditions at . Therefore, they are the same solution and thus is a symmetric solution. This proves the following lemma.
Lemma 2.2.
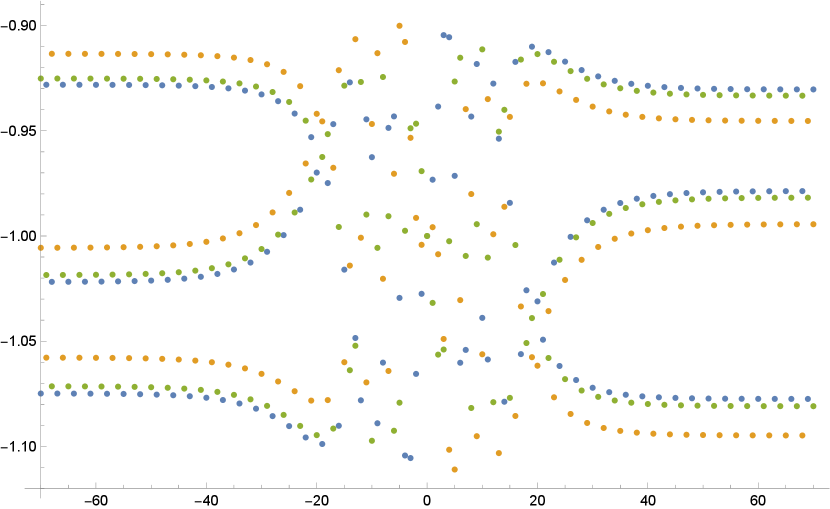
has precisely four symmetric solutions, which are all regular at , each specified by its initial values at , with the four possible initial conditions given by
See Figure 1 for a plot of one the symmetric solutions.
Remark 2.3.
It is instructive to compare this with the symmetric solutions of . In accordance with the definition of symmetric solutions of , see Kaneko [kaneko2005], these are solutions of that satisfy
has precisely four symmetric solutions. Three non-analytic at , with Laurent series in a domain around given by
and one analytic at , specified by
for .
3. Symmetries and the linear problem
In this section, we recall some essential aspects of the linear problem associated with and study their interplay with the symmetries .
In Section 3.1 we recall the Lax pair associated with and lift the action of to it. Then, in Section 3.15, we introduce the connection matrix associated with the linear problem and derive how the symmetries act on it. Finally, in Section 3.3, we compute how transform certain monodromy coordinates and provide an alternative way to classify symmetric solutions.
3.1. The Lax pair
We recall the following Lax pair of , derived in [joshinobu2016],
| (3.1a) | ||||
| (3.1b) | ||||
where
| (3.2a) | ||||
| (3.2b) | ||||
with
| (3.3) |
We refer to the first equation of the Lax pair, equation (3.1a), as the spectral equation.
Compatibility of the Lax pair,
| (3.4) |
is equivalent to satisfying and satisfying the auxiliary equation
| (3.5) |
We proceed to lift the symmetries to this Lax pair. To this end, the following notation will be helpful. For any matrix , we let denotes the co-factor matrix, or adjugate transpose, of . In other words,
We further remind the reader that some of the notation used in this paper, is outlined in Appendix A.
Lemma 3.1.
The symmetry extends to the following symmetry of the Lax pair,
and, consequently,
Similarly, the symmetry extends to the following symmetry of the Lax pair,
where any function that satisfies , and, consequently,
Proof.
We only prove the extension of the first symmetry. The other one follows analogously.
Let us denote and and consider the transformation
This transformation induces the following action on the Lax matrices,
As , it follows that
with
Note that this is consistent with the symmetry , so that indeed defines an extension of .
It remains to be checked that the action of of is consistent with its action on . That is, we need to ensure that
| (3.6) |
where, in acccordance with equation (3.3),
Now, equation (3.6) holds if and only if
By substituting the expression for , it follows that this is equivalent to
By the auxiliary equation (3.5), we have , which simplifies the right-hand side, so that the identify to prove simply reads
The last equality follows by direct computation, using the time-evolution equations.
Finally, we note that the transformation preserves the compatibility condition of the Lax pair (3.4), which reaffirms the fact that is another solution of , and further shows that solves the corresponding auxiliary equation. ∎
Now, consider any symmetric solution of with respect to , then we can choose a corresponding solution of the auxiliary equation such that the Lax matrices have the symmetries
By specialising the first equation to , we then find
| (3.7) |
This provides another way to classify the symmetric solutions of , by computing all the coefficient matrices that possess the symmetry (3.7).
3.2. The connection matrix
In this section, we introduce the connection matrix associated with the Lax pair and deduce how the symmetries act on it.
Firstly, we introduce a canonical solution at in the following lemma.
Lemma 3.2.
[Lemma 3.3 in [joshiroffelsenrhp]] For any fixed , there exists a unique matrix , meromorphic in on , such that
| (3.8) | ||||
| (3.9) |
In particular,
defines a solution of the spectral equation (3.1a), for any choice of functions satisfying
Lemma 3.3.
[Lemma 3.2 in [joshiroffelsenrhp]] For any fixed and , we have
| (3.10) |
and, there exists a unique matrix , meromorphic in on , such that
| (3.11) | ||||
In particular, it follows that
defines a solution of the spectral equation (3.1a), for any choice of meromorphic function satisfying .
We define the corresponding connection matrix by
| (3.12) |
which satisfies, see [joshiroffelsenrhp], for fixed ,
-
(c.1)
is analytic in on ;
-
(c.2)
;
-
(c.3)
, for some ;
-
(c.4)
.
It follows from the compatibility condition (3.4), see [joshiroffelsenrhp] for more details, that
which yields the almost trivial time-evolution of the connection matrix,
| (3.13) |
as well as the time-evolution of in Lemma 3.3,
| (3.14) |
The connection matrix encompasses the monodromy of the Lax pair. In particular, one can in principle uniquely reconstruct the linear system (3.1a) from the connection matrix by solving an associated Riemann-Hilbert problem.
We will now extend the action of the symmetries to the connection matrix.
Lemma 3.4.
The transformation extends to the following symmetry of the canonical solutions and connection matrix,
The transformation extends to the following symmetry of the canonical solutions and connection matrix,
Furthermore, act on , defined in Lemma 3.3, by
Proof.
We only prove the extension for . The extension of is proven analogously.
We first consider the canonical solution at . In fact, by Lemma 3.2, the matrix function is defined uniquely as the solution to (3.8) and (3.9). This means that the action of on is already fixed by its action on the Lax matrix .
To determine it explicitly, we first apply to equation (3.8), which yields
Next, applying to both sides, we obtain
Finally, multiplying both sides from the left and right by , we obtain
with
Note that, furthermore, the normalisation at is correct, namely as . We conclude, from Lemma 3.2, that indeed sends to .
We next consider the canonical solution at . The matrix function , see Lemma 3.3, is only rigidly defined up to the choice of a scalar which satisfies , see equation (3.14). So, in order to fix the action of the symmetry on , we first need to fix its action on in such a way that remains to hold true. Namely, it is required that, if we let under , then
We therefore set , so that indeed
By essentially repeating the computation for above, for , one finds that
defines a solution to, see equation (3.11),
Furthermore, direct evaluation of at gives
It follows that sends to .
Finally, we compute the action of on the connection matrix. Since commutes with inversion, , we have
This finishes the proof of the lemma. ∎
Now, let us take any symmetric solution of with respect to , then we can choose a corresponding solution of the auxiliary equation, as well as satisfying (3.14), such that the connection matrix has the symmetry
By specialising this equation to , we then find
| (3.15) |
This provides yet a third way to classify symmetric solutions of , by classifying all connection matrices with the symmetry (3.15).
3.3. Monodromy coordinates
In [joshiroffelsenrhp], we introduced a set of coordinates on the connection matrix, which are invariant under right-multiplication of the connection matrix by diagonal matrices. They are given by
where, for any rank one matrix , letting and be respectively its first and second row, is defined by
This yields three coordinates, , which satisfy the cubic equation,
| (3.16) | ||||
with coefficients given by
When considering solutions defined on a discrete -spiral, i.e. , the value of uniquely determines the corresponding solution of [joshiroffelsenrhp].
In the following proposition, the action of the symmetries on the monodromy coordinates is determined.
Proposition 3.5.
The symmetry acts on the monodromy coordinates by
The symmetry acts on the monodromy coordinates by
Proof.
To compute the action of the symmetries on the monodromy coordinates, we need some basic facts about the operator . Firstly, given any rank one matrix , and invertible matrix , we have
| (3.17) |
where denotes the möbius transformation
In particular,
Secondly, it is elementary to check that
We now compute, for transformation ,
Similarly, for transformation , we have
and the proposition follows. ∎
In the sequel, the following technical lemma will be of importance. Its proof is given in Appendix B.
Lemma 3.6.
Let , with , be inside the domain of a solution of . If takes at least one non-singular value, i.e. a value in , at a point , then the coordinates cannot lie on the curve defined by the intersection of the following equations in ,
| (3.18) | ||||
with the same coefficients as the cubic (3.16). We note that points on this curve solve the cubic equation (3.16) irrespective of the value of .
Let us now take any solution of on the -spiral . To it, corresponds a unique triplet , defined by , , which satisfies the cubic equation
as follows from the identity , and does not lie on the curve defined by by equations (3.18).
Note that defines another solution on the same domain , and its monodromy coordinates, , , are related to those of by
In particular, is a symmetric solution if and only if , which in turn is equivalent to
| (3.19) |
In other words, symmetric solutions of correspond to monodromy coordinates which satisfy the cubic equation above as well as (3.19).
We proceed to compute four triples that satisfy these conditions. Firstly, equation (3.19) has only two solutions in , given by , and we may thus set , , . Substitution of these into the cubic shows that the latter is identically zero if the epsilons satisfy
as in such a case
In particular, this gives us four solutions,
| (3.20) |
corresponding to the four symmetric solutions in Lemma 2.2.
Whilst for generic values of the parameters, these are the only solutions to the cubic, it may so happen for special values of the parameters, that there is a choice of epsilons, with
that also solves the cubic. But in such a case, a direct computation yields
and thus the point lies on the curve (3.18) and hence does not correspond to a solution of .
4. Explicit solvability of the linear problem at a reflection point
In this section we show that the linear problem is explicitly solvable at the reflection point , for symmetric solutions. In particular, we will prove the following theorem in the end of Section 4.2.
Theorem 4.1.
Let be a symmetric solution of , invariant under , satisfying initial conditions
so that (by Lemma 2.2),
Fix the auxiliary functions and by the initial conditions and . Then, the connection matrix at is explicitly given by
| (4.1) |
where the scalar equals
and the function is defined by
with
In particular, the corresponding values of the monodromy coordinates, , , are given by
| (4.2) |
Remark 4.2.
The spectral equation of the Lax pair (1.3) naturally comes in a factorised form. The fundamental reason that allows us to solve the linear problem at the reflection point , for a symmetric solution as in Theorem 4.1, is that the factors in this form ‘almost’ commute. Namely, by fixing , we have
where
and these factors satisfy the commutation relation,
| (4.3) |
This observation allows us to construct global solutions of the linear system
from solutions of the simpler system
which we will refer to as the model problem.
In Section 4.1, we solve this model problem, and in Section 4.2 we use this to construct global solutions of the spectral equation at and prove Theorem 4.1. The model problem is solved in terms of basic hypergeometric functions, denoted for given parameter , and by
whose mathematical properties can be found in [gasper].
4.1. The model problem
In this section, we study the model problem,
Firstly, we find an explicit expression for the canonical solution at .
Lemma 4.3.
There exists a unique matrix function , analytic on , which solves
| (4.4) |
explicitly given by
where and are the basic hypergeometric functions,
Proof.
It is an elementary computation to show that (4.4) has a unique formal power series solution around . Furthermore, by using the defining formula,
| (4.5) |
it is checked directly that this formal power series solution is indeed given by . Since, furthermore, the series (4.5) has infinite radius of convergence, is an analytic function on , which thus uniquely solves equation (4.4), and the lemma follows. ∎
We have a similar result near .
Lemma 4.4.
Define
| (4.6) |
so that . Then, there exists a unique matrix function , meromorphic on , which satisfies
explicitly given by
where
Proof.
This is proven analogously to Lemma 4.3. ∎
In the following proposition, we explicitly determine the connection matrix of the model problem.
Proposition 4.5.
The connection matrix
| (4.7) |
is given by
where the scalar is given by
Proof.
From the defining properties of and , it follows that
| (4.8) |
In particular, is an analytic function on . Furthermore, it satisfies
and its entries are thus degree one -theta functions, i.e.
for some .
Now, observe that
and therefore
We thus find the following conditions on the coefficients,
Due to equations (4.8), we have
Evaluating this identity at , gives
and therefore . Similarly, we obtain , so that
for some .
Note that must be continuous functions of in the punctured unit disc and they are thus global constants. We now choose , so that
In particular, this means that
and, by noting that , we thus obtain .
It only remains to be checked that . To this end, note that equation (4.7) implies the following connection result,
Setting , with , we thus have
| (4.9) |
We claim that each of the terms
is a real and positive function of on . For example, the inequality , on the positive real line, follows almost directly from the definition of the -Pochammer symbol, and thus
on the positive real line. Therefore, also
on the positive real line. Each of the hypergeometric series, , on the positive real line, since all the coefficients in the different series are positive.
Since , equation (4.9) can thus only hold if , and the proposition follows. ∎
Corollary 4.6.
Remark 4.7.
Note that the solutions to the model problem are essentially built out of Jackson’s -Bessel functions of the second kind,
with and . In particular, we could have alternatively used the known connection results for these functions [zhangbessel, moritabessel], in conjunction with transformation formulas for hypergeometric functions [gasper], to obtain the connection formulas in Corollary 4.6 and, consequently, Proposition 4.5.
4.2. Constructing global solutions
In this section, we construct solutions of the spectral equation at given by
Motivated by the commutation relation (4.3), we consider the ansatz
| (4.10) |
for the matrix function defined in Lemma 3.2, for some to be determined. Using the commutation relation
we find
Therefore, if we set
| (4.11) |
then solves
Furthermore, note that as , so that our ansatz is indeed correct for the choice of above.
Similarly, using the commutation relation
it follows that
| (4.12) |
satisfies
for the same choice of . Furthermore, note that
if we choose in equation (3.10). Therefore, the formula for above is an explicit expression for the canonical matrix function at defined in Lemma 3.3.
We are now in a position to prove Theorem 4.1.
Proof of Theorem 4.1.
By definition, the connection matrix at is given by
where and are given by the explicit formulas (4.10) and (4.12). This yields,
where the constants are defined in equation (4.11) and is defined in equation (4.6).
In order to simplify this expression, we use the following commutation relations,
so that,
In other words, and commute and we thus obtain the following simpler expression for ,
It follows from the computation before, that also commutes with , and we thus obtain
| (4.13) |
It is now a direct computation that yields the explicit expression (4.1) for .
The same holds true for the expressions for the monodromy coordinates (4.2), using equation (4.1). Rather than going through these computations, we finish the proof of the theorem with an alternative method to compute e.g. . Using the factorisation (4.13), we find
Due to the non-resonance conditions (2.2), neither nor vanishes, so by identities (3.17) for the operator, we obtain
Similar computations can be carried out of and the theorem follows. ∎
5. The monodromy problem of the -Okamoto rational solutions
In this section we consider symmetric solutions of defined on (connected) open subsets of the complex plane. A particular class of such solutions is given by the -Okamoto rational solutions. We study them in detail and show that their monodromy problems are solvable for all values of the independent variable.
Let be a non-empty, open and connected subset of the universal covering of , with . We call a triplet of meromorphic functions on that satisfies identically, a meromorphic solution of . We call it symmetric, when the solution (and its domain) are invariant under or .
Each meromorphic solution corresponds to a unique triplet of complex functions on that solve the cubic equation (3.16) identically in and the -difference equations
| (5.1) |
which follow from the time-evolution of the connection matrix (see equation (3.13)).
Now, it might happen that, for special values of , the value of does not lie in , for every . At such times , the monodromy coordinates either have an essential singularity, or they lie on the curve defined by equations (3.18). On the other hand, if is regular for at least one value of , then the value of the monodromy coordinates at is well-defined and does not lie on the curve given by equations (3.18).
In the following, we restrict our discussion to considering meromorphic solutions which do not have -spirals of poles. If such a solution is symmetric with respect to , that is,
then, by Proposition 3.5, the -coordinates have the same symmetry,
| (5.2) |
This means that we can classify symmetric meromorphic solutions, in terms of meromorphic triplets which solve the cubic (3.16), as well as equations (5.1) and (5.2), and do not hit the curve defined by equations (3.18). Similar statements follow for solutions symmetric with respect to , in which case we have
| (5.3) |
In the remainder of this section, we focus on a particular collection of symmetric meromorphic solutions for which we compute the monodromy. These solutions are the -Okamoto rational solutions, which are rational in , derived by Kajiwara et al. [kajiwaranoumiyamada2001].
Theorem 5.1 (Kajiwara et al. [kajiwaranoumiyamada2001]).
For , the formulas
give a solution of rational in , with parameters
in terms of the -Okamoto polynomials defined through the recurrence relations
| (5.4) | ||||
with .
From the recurrence relations for the -Okamoto polynomials, it follows that is a monic polynomial of degree . Furthermore, it can be shown by induction that the polynomials are palindromic, i.e.
| (5.5) |
for . It follows that, upon writing , the corresponding rational solutions defined in Theorem 5.1, satisfy
for and any choice of sign. In other words, they are invariant under both and .
Now consider the branch of which evaluates to at . There, the -Okamoto rationals specialise to the symmetric solutions on discrete time domains classified in Lemma 2.2. To see this, it is helpful to note that equation (5.5) implies
Thus, at , so that ,
By similar computations for and , we obtain
| (5.6) |
So depend on the values of , the -Okamoto rational solutions specialise to the different symmetric solutions in Lemma 2.2, on the -spiral .
5.1. Solvable monodromy for the seed solution
In this section, we consider the simplest member of the family of rational solutions defined in Theorem 5.1, corresponding to . The parameters of then read
and
We call this solution the seed solution. The corresponding value of in (3.3) is given by
and explicit solutions to the auxiliary equations (3.5) and (3.14) are given by
In this special case, the matrix polynomial in the spectral equation (1.3a) factorises as
with
This means that any solution of
| (5.7) |
also defines a solution of the spectral equation. A classical result [lecaine] shows that equation (5.7) can be solved in terms of Heine’s -hypergeometric functions. We can thus leverage the connection results by Watson [watson], see also [gasper, Section 4.3], to compute the connection matrix of the spectral equation.
We find that the matrix function , defined in Lemma 3.2, is given explicitly by
The matrix function , defined in Lemma 3.3, is given by
The corresponding connection matrix is then
The monodromy coordinates can now by computed directly. To this end, we note that , so that
for . In particular, we have
which confirms that the coordinates satisfy the -difference equation (5.1) as well as symmetries (5.2) and (5.3). Furthermore, we note that the monodromy coordinates have three branches in the complex -plane, each corresponding to a particular branch of the solution .
5.2. Solvable monodromy of the -Okamoto rational solutions
In this section, we consider how to generate the monodromy coordinates of the whole family of rational solutions in Theorem 5.1. We do so by applying translation elements in the affine Weyl symmetry group , see [kajiwaranoumiyamada2001], which act on the parameters as
It was shown in [joshinobu2016] that these translations act as Schlesinger transformations on the spectral equation (1.3a).
By methods similar to the derivation of equation (5.1), it can be shown that these translations act on the monodromy coordinates as follows
The family of rational solutions in Theorem 5.1 are indexed by . The translations act on the family of rational solutions through the following shifts of indices,
It follows that, for general , the monodromy coordinates corresponding to the rational solution in Theorem 5.1, with indices , are given by
| (5.8) | |||
We proceed to check that these formulas are consistent with equation (4.2) in Theorem 4.1. Recalling equations (5.6), which provide the rational solutions at , we find the initial conditions at :
Similarly, evaluating the expressions for the -coordinates in equations (5.8) at , leads to
These two expressions are consistent with equation (4.2).
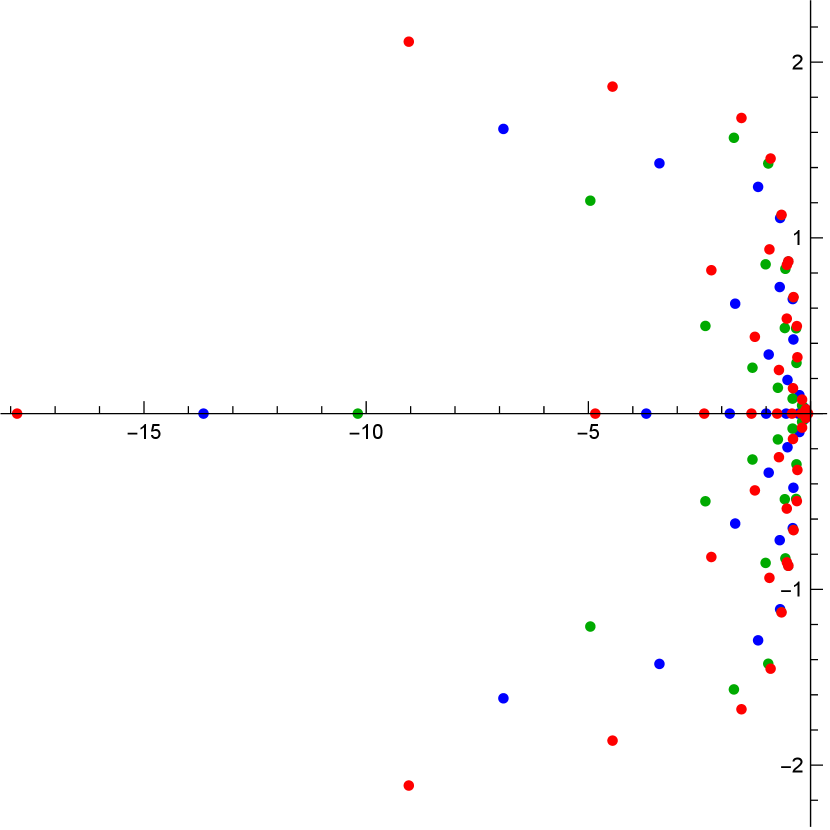
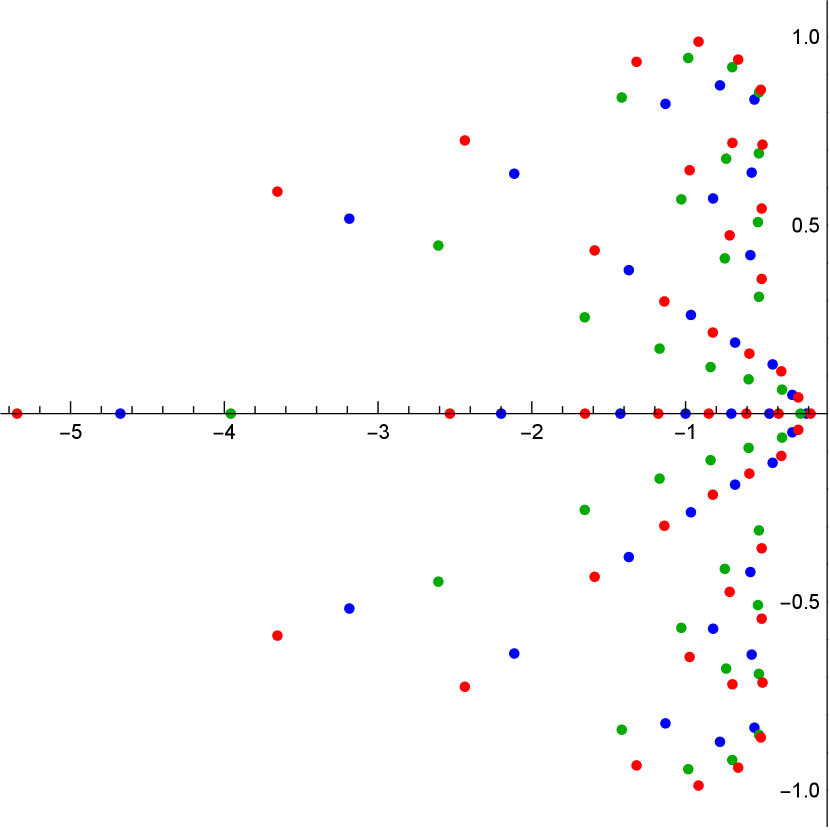
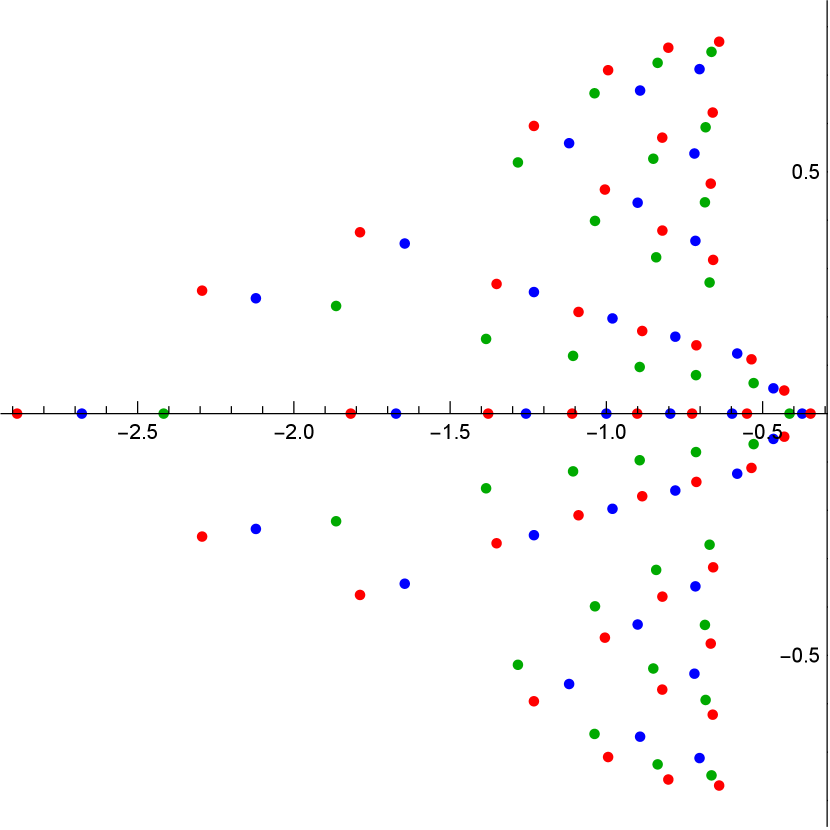
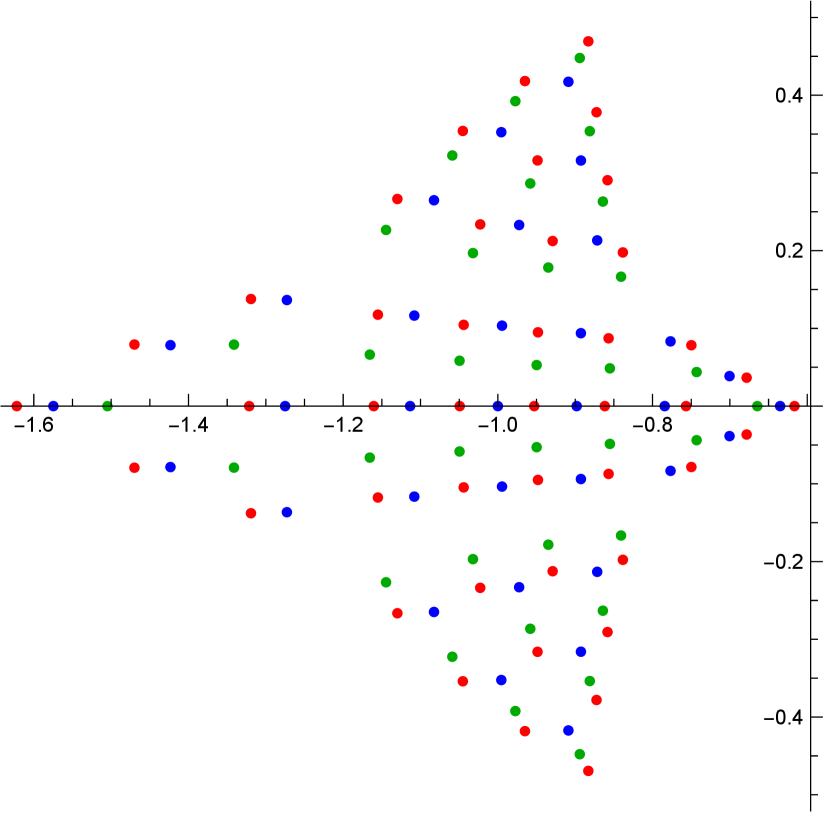
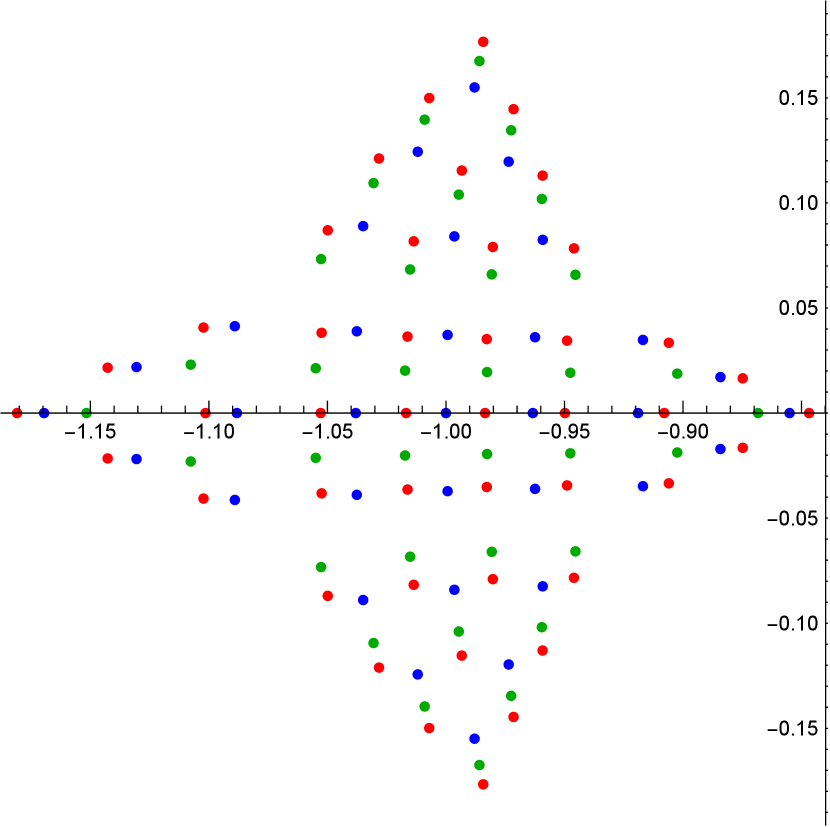
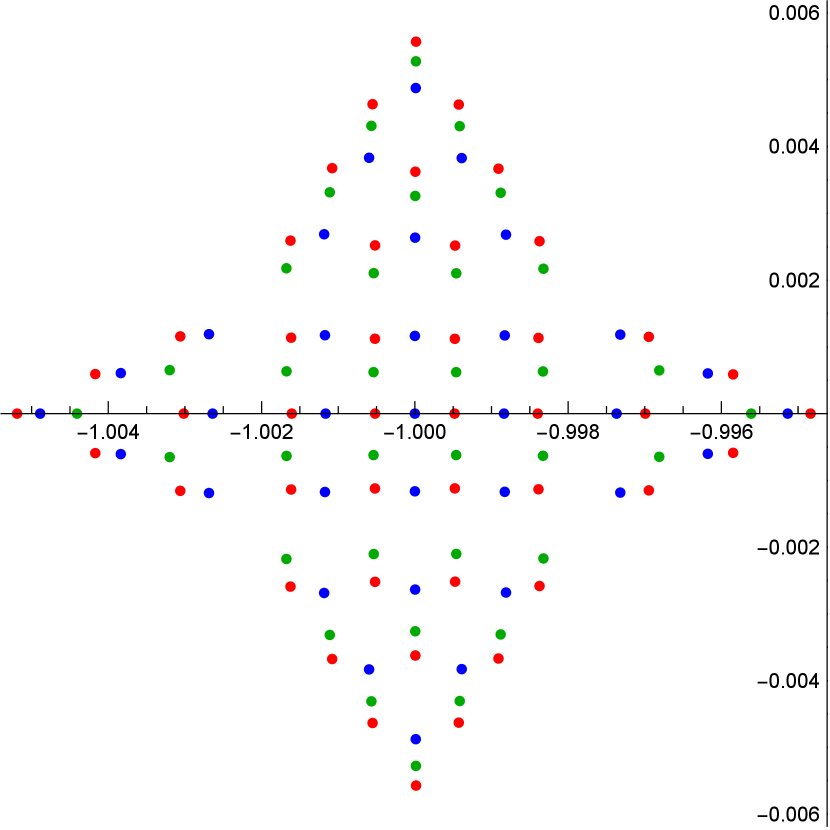
We conclude the section with some graphical representations of the pole distributions of a -Okamoto rational solution in Figure 2.
6. Conclusion
We have shown that two symmetries of can be lifted to the corresponding Lax pair and monodromy manifold. We have derived four symmetric solutions of on the discrete time domain , which are invariant under . We have further shown that they lead to solvable monodromy problems at the reflection point , which provided an explicit correspondence between the four symmetric solutions and the four points on the monodromy manifold invariant under in Theorem 4.1.
We also studied the family of -Okamoto rational solutions and showed that they are invariant under both and . We further showed that their simplest member leads to an explicitly solvable monodromy problem in its entire -domain. We used this to determine the values of the monodromy coordinates on the monodromy manifold for all the -Okamoto rational solutions. The computation of the monodromy for the -Okamoto rational solutions in Section 5 could serve as a starting point for deducing similar results for other -equations.
The pole distributions of the classical Okamoto rational solutions to have been analysed via Riemann-Hilbert methods [buckmiller] and the Nevanlinna theory of branched coverings of the Riemann sphere [masoeroroffelsen]. The extension of such studies to the -difference Painlevé equations is an open problem.
The results of this paper yield Riemann-Hilbert representations for both the symmetric solutions on discrete time domains and the -Okamoto rational solutions, through the theory set up in our previous paper [joshiroffelsenrhp]. These can in turn form the basis of the rigorous asymptotic analysis of these solutions, as grows small or large or some of the parameters tend to infinity.
Appendix A Notation
Define the Pauli matrices
We define the -Pochhammer symbol by means of the infinite product
which converges locally uniformly in on . In particular is an entire function, satisfying
with and simple zeros on the semi -spiral . The -theta function is defined as
| (A.1) |
which is analytic on , with essential singularities at and and simple zeros on the -spiral . It satisfies
For we denote
For conciseness, we will use bars to denote iteration in . That is, for , we denote , and .
Appendix B Proof of a technical lemma
Proof of Lemma 3.6.
Let be the connection matrix corresponding to the solution . Let be such that is regular. Then the Lax matrix is well-defined at this point and consequently, we have a corresponding connection matrix defined via equation (3.12). Furthermore, using the time-evolution of the connection matrix in equation (3.13), we can thus infer that is also well-defined.
Now suppose, on the contrary, that the corresponding monodromy coordinates,
lie on the curve defined by the cubic equations (3.18). We are going to obtain a contradiction by showing that does not satisfy property c.3. To this end, we will first obtain a general parametrisation of this curve.
Consider the following matrix function,
| (B.1) |
where
for any choice of . This matrix satisfies properties c.1, c.2, c.4, as well as a degenerate version of c.3, namely
The monodromy coordinates, , , of this pseudo-connection matrix, read
| (B.2) |
These monodromy coordinates solve the cubic (3.16) and their expressions are completely independent of . In other words, they lie on the intersection of cubics (3.16), as varies in . In particular, these monodromy coordinates must lie on the curve defined by (3.18).
We will show that (B.2) completely parametrises the curve defined by (3.18), as varies in . Since we have not assumed anything on , this is equivalent to proving that there exists a such that
| (B.3) |
Now, the equation
has two, counting multiplicity, solutions , on the elliptic curve , related by modulo multiplication by .
For either choice, or , we have and the pairs and satisfy the same two equations (3.18), which are quadratic in the remaining variables. In fact, upon fixing the value of , (3.18) has two solutions (counting multiplicity), and these two solutions coincide if and only if and coincide on the elliptic curve . It follows that (B.3) holds for or .
We now fix such that (B.3) holds, set in (B.1), and consider the quotient
Since and have the same monodromy-coordinate values, is analytic at , and thus forms an analytic matrix function on . Then, by property c.2,
Since , the only analytic matrix functions satisfying this -difference equation are constant diagonal matrices, and therefore is simply a constant diagonal matrix. But then
and neither diagonal entry of can equal zero, as this contradicts equation (B.1), so . Hence
which contradicts property c.3. The lemma follows. ∎
References
- BuckinghamR.J.MillerP.D.Large-Degree Asymptotics of Rational Painlevé-IV Solutions by the Isomonodromy MethodConstr. Approx.562022233–443@article{buckmiller,
author = {Buckingham, R.J.},
author = {Miller, P.D.},
title = {{Large-Degree Asymptotics of Rational Painlevé-IV Solutions by the Isomonodromy Method}},
journal = {Constr. Approx.},
volume = {56},
date = {2022},
pages = {233–443}}
GasperG.RahmanM.Basic hypergeometric seriesCambridge University Press, Cambridge1990@book{gasper,
author = {Gasper, G.},
author = {Rahman, M.},
title = {Basic hypergeometric series},
publisher = {Cambridge University Press, Cambridge},
date = {1990}}
JoshiN.RoffelsenP.On the riemann-hilbert problem for a -difference painlevé equationComm. Math. Phys.38420211549–585@article{joshiroffelsenrhp,
author = {Joshi, N.},
author = {Roffelsen, P.},
title = {On the Riemann-Hilbert problem for a $q$-difference Painlev\'{e}
equation},
journal = {Comm. Math. Phys.},
volume = {384},
date = {2021},
number = {1},
pages = {549–585}}
JoshiN.NakazonoN.Lax pairs of discrete Painlevé equations: caseProc. Roy Soc. A.472201606962016@article{joshinobu2016,
author = {Joshi, N.},
author = {Nakazono, N.},
title = {Lax pairs of discrete {P}ainlev\'e equations:
{$(A_2+A_1)^{(1)}$} case},
journal = {Proc. Roy Soc. A.},
volume = {472},
pages = {20160696},
year = {2016}}
JoshiN.NakazonoN.ShiY.Reflection groups and discrete integrable systemsJournal of Integrable Systems11–372016@article{joshinobushi2016,
author = {Joshi, N.},
author = {Nakazono, N.},
author = {Shi, Y.},
title = {Reflection groups and discrete integrable systems},
journal = {Journal of Integrable Systems},
volume = {1},
pages = {1–37},
year = {2016}}
KajiwaraK.NoumiM.YamadaY.A study on the fourth -Painlevé equationJ. Phys. A342001418563–8581@article{kajiwaranoumiyamada2001,
author = {Kajiwara, K.},
author = { Noumi, M.},
author = {Yamada, Y.},
title = {A study on the fourth {$q$}-{P}ainlev\'{e} equation},
journal = {J. Phys. A},
volume = {34},
year = {2001},
number = {41},
pages = {8563–8581}}
KanekoK.A new solution of the fourth painlevé equation with a solvable monodromyProc. Japan Acad., Ser. A81575–792005The Japan Academy@article{kaneko2005,
author = {Kaneko, K.},
title = {A new solution of the fourth Painlev{\'e} equation with a solvable monodromy},
journal = {Proc. Japan Acad., Ser. A},
volume = {81},
number = {5},
pages = {75–79},
year = {2005},
publisher = {The Japan Academy}}
KanekoK.OkumuraS.Special solutions of the sixth painleve equation with solvable monodromy2006arXiv:math/0610673@article{pvisymmetric,
author = {Kaneko, K.},
author = {Okumura, S.},
title = {Special Solutions of the Sixth Painleve Equation with Solvable Monodromy},
year = {2006},
journal = {arXiv:math/0610673}}
@article{kitaev1991symmetrical}
- title=On symmetrical solutions for the first and second Painlevé equations, author=Kitaev, A.V., journal=Zapiski Nauchnykh Seminarov POMI, volume=187, pages=129–138, year=1991, publisher=St. Petersburg Department of Steklov Institute of Mathematics, Russia @article{jk:01}
- author = Joshi, N, author = Kitaev, A.V., journal = Stud. Appl. Math., number = 3, pages = 253–291, publisher = Wiley Online Library, title = On Boutroux’s tritronquée solutions of the first Painlevé equation, volume = 107, year = 2001 Le CaineJ.The linear -difference equation of the second orderAmer. J. Math.651943585–600@article{lecaine, author = {Le Caine, J.}, title = {The linear $q$-difference equation of the second order}, journal = {Amer. J. Math.}, volume = {65}, date = {1943}, pages = {585–600}} MasoeroD.RoffelsenP.Poles of painlevé iv rationals and their distributionSIGMA Symmetry Integrability Geom. Methods Appl.142018Paper No. 002, 49@article{masoeroroffelsen, author = {Masoero, D.}, author = {Roffelsen, P.}, title = {Poles of Painlev\'e IV Rationals and their Distribution}, journal = {SIGMA Symmetry Integrability Geom. Methods Appl.}, volume = {14}, year = {2018}, pages = {Paper No. 002, 49}} MoritaT.A connection formula of the hahn-exton -bessel functionSIGMA Symmetry Integrability Geom. Methods Appl.72011Paper 115, 11@article{moritabessel, author = {Morita, T.}, title = {A connection formula of the Hahn-Exton $q$-Bessel function}, journal = {SIGMA Symmetry Integrability Geom. Methods Appl.}, volume = {7}, date = {2011}, pages = {Paper 115, 11}} Symmetric solution of the painlevé iii and its linear monodromyOkumuraS.RIMS Kôkyûroku Bessatsu B2151–1572007@article{okumura2007symmetric, title = {Symmetric Solution of the Painlev{\'e} III and its Linear Monodromy}, author = {Okumura, S.}, journal = {RIMS K{\^o}ky{\^u}roku Bessatsu B}, volume = {2}, pages = {151–157}, year = {2007}} SakaiH.Rational surfaces associated with affine root systems and geometry of the Painlevé equationsComm. Math. Phys.22020011165–229@article{sakai2001, author = {Sakai, H.}, title = {Rational surfaces associated with affine root systems and geometry of the {P}ainlev\'e equations}, journal = {Comm. Math. Phys.}, volume = {220}, year = {2001}, number = {1}, pages = {165–229}} @article{umemura1998painleve}
- author = Umemura, H., journal = Sugaku Expositions, number = 1, pages = 77–100, publisher = Providence, RI, USA: The Society, c1988-, title = Painlevé equations and classical functions, volume = 11, year = 1998 @article{watson}
- author = Watson, G.N., title = The continuation of functions defined by generalized hypergeometric series, journal = Trans. Cambridge Phil. Soc., number = 21, pages = 281–299, year = 1910 ZhangC.Sur les fonctions -bessel de jacksonFrench, with English summaryJ. Approx. Theory12220032208–223@article{zhangbessel, author = {Zhang, C.}, title = {Sur les fonctions $q$-Bessel de Jackson}, language = {French, with English summary}, journal = {J. Approx. Theory}, volume = {122}, date = {2003}, number = {2}, pages = {208–223}}