On some characterizations of convex polyhedra
Abstract.
This work provides two sufficient conditions in terms of sections or projections for a convex body to be a polytope. These conditions are necessary as well.
1. Introduction
Many curious properties of convex bodies can be determined by two dual notions: projections and sections. This paper contains characterizations of polytopes in terms of non-central sections as well as point projections (see Figure 1).
Theorem A.
Let be a convex body in , and be a set of -dim affine spaces, , all of which intersect the interior of , such that:
-
•
for any supporting line of , there exists a plane ;
-
•
for all , the intersection is a -dim polytope.
Then is a polytope.

For instance, if and is a continuous function on , then set of hyperplanes intersecting the interior of ,
satisfies the conditions of the theorem for sufficiently small (see [BG]). In particular, for , Theorem A implies the celebrated result of Victor Klee from 1959
Theorem 1 ([K]).
A bounded convex subset of is a polytope if any of its -dim central sections, , is a polytope.
The version of Theorem A for ellipsoids was handled in [BG]. It also implies the corresponding result for Euclidean balls. We note that such settings are considered in several problems of Convex Geometry, such as questions related to characterizations of balls by sections and caps ([KO]), conical sections ([RY]), floating bodies ([B], [BSW]), -sections ([Y], [YZ]). Additionally, we also provide the following dual result for visual cones (see definition 1)
Theorem B.
Let be a convex body in , and be a set of exterior points of that satisfies:
-
•
for any supporting line of , there exists a point ;
-
•
for a fixed , , and all , any -dim visual cone is polyhedral.
Then is a polytope.
For example, a closed surface containing in its interior satisfies the conditions of the point-set in Theorem B. Also, when is a convex surface, the analogous problem for circular cones was solved in [M]. In the class of elliptical cones, where is a closed set, the corresponding result was obtained for ellipsoids in [BG]. Two pertinent characterizations of ellipsoids regarding visual cones were considered in [GO]. Questions related to measures of visual cones rather than shapes were also studied in [Ku] and [KO]. A resembling construction for illumination bodies is discussed in [MW]; for the related well-known illumination problem see [Bo] and [BH]. A question regarding the visual recognition of polytopes was also investigated in [My].
Lastly, by polar duality ([Ga], p. 22), Theorem A allows one to extend Theorem B to the case of infinitely distant points. This way, we obtain Klee’s Theorem for orthogonal projections
Theorem 2 ([K]).
A bounded convex subset of is a polytope if any of its -dim orthogonal projections, , is a polytope.
2. Preliminary definitions and results
In this section we provide the results, definitions, and notation for notions used throughout the paper. For more details on these and related concepts of Convex Geometry, see [Ga], [Gr], [S].
By lowercase letters such as etc., we denote points in -dim Euclidean space , . For any two points , the closed segment connecting them is denoted by , and its interior is . Notation stands for the angle between and . The Euclidean length of is . Then, the unit sphere with center at the origin is .
For a set , , by we mean the set of relative interior points of , and stands for its set of boundary points in . A set is called convex if for any , one also has . By a convex body we mean a compact convex set with non-empty interior. A line is called a supporting line of a set if . A supporting ray is a half-line of a supporting line that has non-empty intersection with the set. For a convex set , a point is called extreme if there do not exist two distinct points , such that . The distance between point and a set is
The convex hull of a finite number of sets is
The convex hull of a finite number of points is called a (convex) polytope. In this regard, Minkowski was first to show
Proposition ([Gr], p.75).
Every convex set in is the convex hull of its extreme points.
In particular, it implies that a polytope is the convex hull of the finite set of its extreme points that are called vertices.
By polyhedral cone with apex at the origin, we understand a non-empty intersection of a finite family of closed half-spaces. By a translation, we extend this notion to a cone with the apex at any point .
The natural notion of a full-dimensional visual (also called sight in [M]) cone of a set (see Figure 1 and Theorem B), with apex at is
| (1) |
For a set with non-empty relative interior, consider a -dim affine subspace , , such that and . Then, a -dim visual cone with the apex at is a sub-cone of ,
In this regard, observe the following result of Mirkil
Lemma 1 ([Mi]).
A cone with the apex at the origin is polyhedral if and only if, for any -dim subspace , , the cone is either empty or polyhedral.
3. Proof of Theorem A
To prove Theorem A, we need a couple of auxiliary results. The case of the following considerations for central sections was shown in [Z]. Here we provide their generalizations for non-central cases in .
Lemma 2.
Let be a convex body and be a -dim convex set, , . Let be two distinct points, such that , then
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/fb83332e-27f2-44f0-980e-478a9b8ea204/diamond.png)
Proof.
Assume the opposite, that there exists a point , such that . Then, there exists a line segment , such that and . This follows from the observation that is contained in a ball of small enough radius contained in completely, so can be chosen from its boundary sphere. Hence,
However, this contradicts the original assumption . ∎
The next proposition shows that the conditions of the theorem prevent extreme points of from “concentrating along” a segment in .
Proposition 1.
Suppose that a convex body satisfies the conditions of Theorem A. Let be two distinct points, then there exists such that any is not an extreme point of if
Proof.
We consider two possible cases.
-
Case 1.
.
Assume that there exists a point (see Figure 2). Then, for a small enough , ball of radius centered at belongs to the interior of , , and . Hence, we have
Thus, we can choose to be the mid-point of and an such that

Figure 2. has no extreme points too close to point and segment . -
Case 2.
Let be a plane that intersects transversally at the mid-point . Then for the polytope . Let be all the facets of that contain , and be the set of all of their vertices. If is one of these vertices, exclude it from the set. By Lemma 2,
Let a point , , and
Then, for any point , such that and , we have
Thus, cannot be an extreme point of .
∎
Remark.
The previous proposition shows that a small enough cone of revolution with apex and axis of rotation parallel to cannot have any extreme points of in a small enough neighbourhood of .
Now we have all the necessary ingredients to prove Theorem A.
Proof.
Suppose to the contrary that is an infinite set of distinct extreme points of . In particular, this implies that is bounded. By Bolzano–Weierstrass theorem, we can consider a convergent subsequence
Then, , otherwise, any point in a small neighbourhood of cannot be extreme. Again, consider a convergent subsequence such that the unit vectors
Let be the ray passing through in the direction of . Our last step is to show that, under the assumptions of Theorem A, must intersect at more than a single point . Note that is a supporting ray of (otherwise, conditions on and are not satisfied). Pick a plane from the given family that contains . Let be a supporting ray of that passes through , contains a non-trivial segment , and has the least angular distance to (by the angular distance we mean the angle between directional vectors of the rays). The existence of follows from the fact that is a polytope.
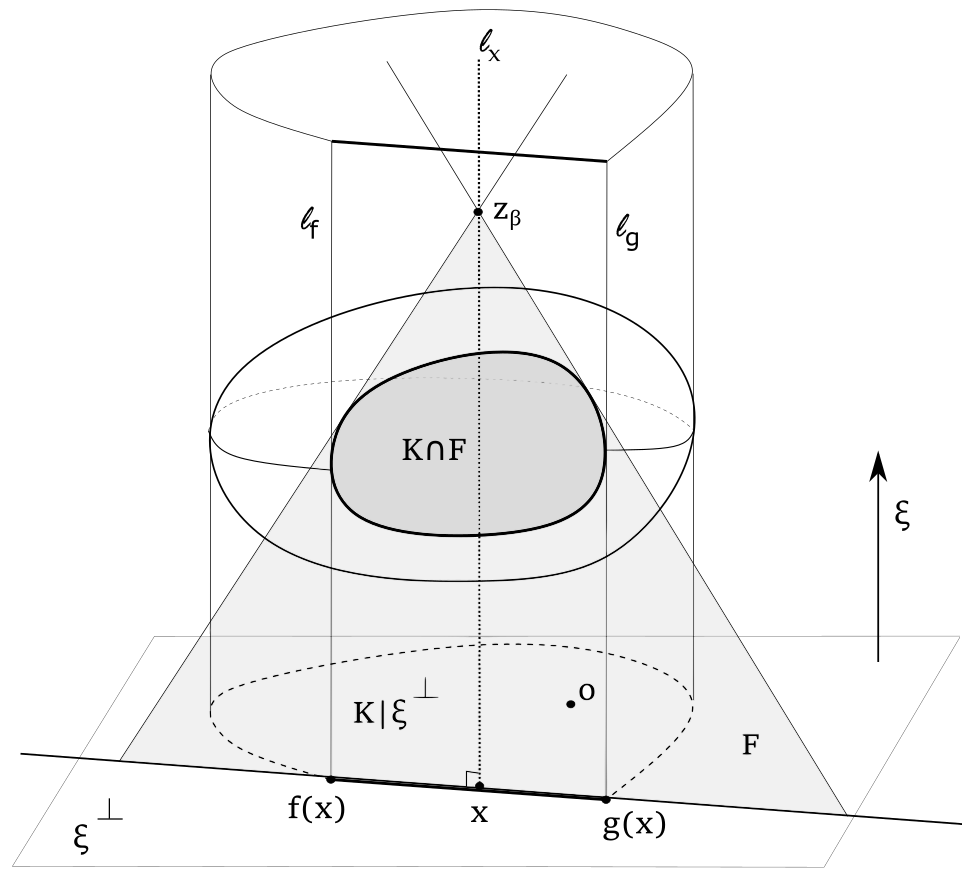
Let be a hyperplane containing , and such that is parallel to the normal vector of . Also, let be a hyperplane orthogonal to ray and passing through point (see Figure 3). Then let be the orthogonal projection of onto ; be the orthogonal projection of (or ) onto ; is the orthogonal projection of on (or on ), is the orthogonal projection of on . Lastly, . Denote
where .

Our goal is to show that . For , we have
Now, , thus
Since is a convex body, we may define the boundary locally around as at most two graphs of convex functions , where can be chosen as the -plane. To see this we note that, by convexity, any non-empty intersection of a normal line to with is a closed segment , where . This correspondence between a point in and the boundary may not define as two graphs only if . Let be a line in passing through and such that . For a small enough neighbourhood of points in , the line is not parallel to their supporting lines. We may apply a sheaf transformation to ”skew“ along towards the interior. Under this affine transformation, remains convex, and no such othogonal segments contained in in a small neigbourhood are possible. Luckily, convex functions are locally Lipschitz ([RV]), which implies that
Here is chosen as the maximum of the two Lipschitz constants in case locally is represented as two graphs. Hence, for a constant angle , . We conclude that and . In these settings, we apply Proposition 1 for the segment to observe that cannot be extreme in a small neighbourhood of , however the sequence of extreme points for . This yields a contradiction to the assumption on an infinite number of extreme points of . ∎
4. Proof of Theorem B
4.1. Case
First, we prove that any extreme point of a -dim projection of is an intersection of an edge of a visual cone with the -dim plane of the projection. Then, we show that every -dim projection of is a polygon. Thus, by Theorem 2 in , we conclude that is a polytope.
Proof.
Choose an arbitrary . For any , consider the line
Then take and consider the support cone (see Figure 4).
Assume that intersects the relative interior of the facet of cone contained in a plane . Then is a convex subset of , and consider two distinct lines parallel to that are supporting lines of in . Denote
Hence, the orthogonal projection of onto is the non-degenerate segment . Which also implies that is not an extreme point of . We repeat the same consideration for and a point to note that may not intersect the relative interior of a facet of , otherwise is projected onto an interior point of . Thus, contains an edge of and is an isolated extreme point of . We continue this procedure counterclockwise starting from and preserving the notation to obtain a countable sequence of extreme points , where

We claim that is finite. Assume the opposite, and let us use a polar coordinate system in with the pole in the interior of the projection, and value corresponding to point (see Figure 5). This way we obtain a sequence of angles . Observe that is strictly increasing (by the construction) and bounded (). The monotone convergence theorem implies that
which corresponds to some point . Hence, any neighbourhood of in must contain an extreme point.
On the other hand, the closest extreme point to is at a fixed distance
regardless whether is an extreme point itself or not. This yields a contradiction to the assumption that is infinite. It implies that has a finite number of extreme points, i.e., is a polygon. Thus, by Theorem 2, is a polytope. ∎
4.2. Case
Proof.
Consider any -dim subspace , set , and section . By Lemma 1, for any point , cone is polyhedral. Hence, the previous considerations apply, and projection of on any -dim subspace of is a polygon. Thus, by Theorem 2, is a polytope. Since any -dim subspace of is a subspace of some -dim subspace , by Theorem 2 we conclude that is a polytope as well. ∎
Acknowledgement
The author would like to express his gratitude to Anton Petrunin for an enlightening conversation, to the anonymous Referee for the valuable remarks that improved the paper, and to the Pacific Institute for the Math Sciences (PIMS) for the continuous support.
References
- [BSW] F. Besau, C. Schuett, E. Werner, Flag Numbers and Floating Bodies, Advances in Math. 338 (2018), pp. 912 – 952.
- [B] W. Blaschke Vorlesungen über Differentialgeometrie und geometrische Grundlagen von Einsteins Relativitätstheorie II. Affine Differentialgeometrie (German), Grundlehren der mathematischen Wissenschaften 7 (1923), Springer.
- [Bo] V. Boltyanskiĭ Illumination problem for convex bodies (in Russian), Bul. Izv. Akad. Nauk Moldav. SSR 10 (76) (1960), pp. 77 – 84.
- [BG] G. Bianchi, P. M. Gruber, Characterizations of ellipsoids, Arch. Math. (Basel) 49 (no. 4, 1987), pp. 344 – 350.
- [BH] H. Bieri, H. Hadwiger, On the problem of the complete system of inequalities for convex bodies of revolution (in German), Elem. Math. 12 (1957), pp. 101 – 108.
- [BL] K. Bezdek, A. E. Litvak, On the vertex index of convex bodies, Adv. Math. 215 (2007), no. 2, pp. 626 – 641.
- [Ga] R. J. Gardner, Geometric tomography, 2nd edition., Encyclopedia of Mathematics and its Applications 58 (2006), Cambridge University Press.
- [Gr] P. M. Grüber, Convex and Discrete Geometry, Springer-Verlag Berlin Heidelberg (2007).
- [GO] P. M. Grüber, T. Ódor, Ellipsoids are the most symmetric convex bodies, Arch. Math. (Basel) 73 (no. 5, 1999), pp. 394 – 400.
- [K] V. Klee, Some characterizations of convex polyhedra, Acta Math. 102 (1959), pp. 79–107.
- [KO] Á. Kurusa, T. Ódor, Characterizations of balls by sections and caps, Beitr. Algebra Geom. 56 (no. 2, 2015), pp. 459 – 471.
- [Ku] Á. Kurusa, You can recognize the shape of a figure from its shadows!, Geom. Dedicata 59 (no. 2, 1996), pp. 113 – 125.
- [M] S. Matsuura, A problem in solid geometry, J. Math. Osaka City Univ 12 (1961), pp. 89 – 95.
- [Mi] H. Mirkil, A new characterizations of polyhedral cones, Canadian J. Math. 9 (1957), pp. 1–4.
- [MW] O. Mordhorst, E. Werner, Floating and illumination bodies for polytopes: duality results. Discrete Anal. (2019), Paper No. 11, 22 pp.
- [My] S. Myroshnychenko, On recognizing shapes of polytopes from their shadows, Discrete Comput. Geom. 62, pp. 856–864 (2019).
- [RV] A. W. Roberts, D. E. Varberg, Another proof that convex functions are locally Lipschitz, The American Mathematical Monthly, Vol. 81, No. 9 (Nov., 1974), pp. 1014 – 1016.
- [RY] D. Ryabogin, V. Yaskin, Detecting symmetry in star bodies, J. of Math. Analysis and Applications 395 (2012), pp. 509 – 514.
- [S] R. Schneider, Convex bodies: the Brunn-Minkowski theory, 2nd edition, (1993, 2014), Cambridge University Press.
- [Y] V. Yaskin, Unique determination of convex polytopes by non-central sections, Math. Ann. 349, (no. 3, 2011), pp. 647 – 655.
- [YZ] V. Yaskin, N. Zhang, Non-central sections of convex bodies, Israel J. Math. 220 (2017), pp. 763 – 790.
- [Z] J. Zanazzi, A short proof of Klee’s theorem, Discrete Math. 314 (2014), pp. 14 – 16.