On Boundaries of -neighbourhoods
of Planar Sets, Part I: Singularities
Abstract.
We study geometric and topological properties of singularities on the boundaries of -neighbourhoods of planar sets . We develop a novel technique for analysing the boundary and obtain, for a compact set and , a classification of singularities (i.e. non-smooth points) on into eight categories. We also show that the set of singularities is either countable or the disjoint union of a countable set and a closed, totally disconnected, nowhere dense set.
2020 Mathematics Subject Classification:
51F30; 57K20, 54C50, 51M15, 58C061. Introduction
1.1. Motivation
For a given set and radius , the (closed) -neighbourhood of is the set
| (1.1) |
where the overline denotes closure and is an open ball of radius in the Euclidean metric. The sets are also known in the literature as tubular neighbourhoods [15], collars [24] or parallel sets [27, 33]. The boundary is a subset of the set , which is sometimes referred to as the -boundary [14] or -level set [23] of .
The central question addressed in this paper concerns the geometric and topological properties of such sets , with a focus on properties of its boundary . This is not only a very natural and fundamental question in (Euclidean) geometry, but it is also relevant in specific settings where -neighbourhoods naturally arise. For instance, we are motivated by the classification and bifurcation of minimal invariant sets in random dynamical systems with bounded noise [21], but -neighbourhoods also naturally feature for instance in control theory [9].
Notwithstanding significant theoretical progress on the properties of -neighbourhoods during the last decades, the geometric classification of possible boundaries has remained open, even in dimension two.
1.2. Main results

Our main achievement is the development of a novel technique for analysing geometric properties of the boundary , enabling a local representation for the boundary around every boundary point via graphs of Lipschitz continuous functions. We employ this representation to obtain a classification of points on the boundary of -neighbourhoods of compact planar sets.
Our first main result establishes that for any compact set and , each boundary point is either a smooth point (in the sense that, in a neighbourhood of , is a -curve) or falls into exactly one of eight distinct categories of singularities.
Theorem 1.
Let be compact, , and let be a boundary point of that is not smooth. Then belongs to precisely one of the following eight categories:
| (S1) | wedge, | (S5) | shallow-shallow singularity, |
| (S2) | sharp singularity, | (S6) | chain singularity, |
| (S3) | sharp-sharp singularity, | (S7) | chain-chain singularity, |
| (S4) | shallow singularity, | (S8) | sharp-chain singularity. |
Definition 4.1 contains a rigorous definition of these categories, but for indicative sketches of the singularity types, see Figure 1.
The proof of Theorem 1 is based on the construction of a local boundary representation, given in Proposition 3.5, that allows us to treat small parts of the boundary as finite unions of graphs of continuous functions. This representation in turn relies on a local contribution property, Proposition 3.1, which states that the geometry of the boundary near each boundary point essentially depends on contributions from points in at most two directions.
Using these same ingredients, we establish our second main result regarding the cardinality of the different types of singularities.
Theorem 2.
For any compact set , the number of wedges (S1), sharp singularities (S2, S3 and S8), one-sided shallow singularities (S4) and chain singularities (S6) on is at most countably infinite.
In addition, we present examples which illustrate that the sets of shallow-shallow singularities (S5) and chain-chain singularities (S7) may be uncountable on , see Examples 5.5 and 5.7. We refer to the union of categories S6, S7 and S8 as chain singularities and denote the set of chain singularities on by . Even though the set of chain-chain singularities (S7) may in general be uncountable and can have a positive Hausdorff measure on the boundary , our third main result establishes the fact that is closed and totally disconnected.
Theorem 3.
For any compact set and , the set of chain singularities is closed and totally disconnected.
As a corollary, Theorem 3 implies that is nowhere dense on , and is hence small in the topological sense.
1.3. Context
Building on the topological groundwork of [4] and [7], our paper constitutes a first step in the analysis of the local geometry and topological properties of the boundary , with a particular focus on singularities. A main difference with the majority of the existing literature on boundaries of -neighourhoods in this direction [4, 7, 14, 15, 28, 29, 33], is that we do not require (implicit) conditions on .
-neighbourhoods arise in many branches of mathematics, ranging from convex analysis and manifold theory [24] to fractal geometry [18] and stochastic processes [20]. In the latter, so-called Wiener sausages represent smoothed-out counterparts of Brownian motion trajectories [10, 16, 25, 26], with applications in theoretical physics [17, 22, 32]. The interplay between the surface area and volume of -neighbourhoods [27, 33] and different notions of dimension [18], as well as the dependence of the manifold structure of the boundary on the radius [13, 14, 15, 28, 29] have all received considerable attention during the last decades. In particular, Rataj and collaborators [25, 26, 27, 28, 29] have advanced the understanding in recent years.
The study of -neigbourhoods and their boundaries dates back at least to the 1940s and Paul Erdős's remarks [11] regarding their measurability. Following Brown's (1972) initial topological observations [7], Ferry (1976) showed that -boundaries are -manifolds in dimensions for almost all , but that this fails for [14]. Setting up the problem in a more extensive theoretical framework, Fu (1985) used the semiconcavity of the distance function to show that the complement is a set of positive reach, as defined by Federer (1959) [13, 15]. This allowed him to show that for an arbitrary compact set in dimension there exists an exceptional set of Lebesgue measure , with the property that the boundaries are Lipschitz manifolds whenever . Rataj and Zajíček (2020) has improved further on these results by providing optimal conditions on the smallness of the set [29].
1.4. Outlook
Our novel technique also allows for the analysis of global topological and regularity properties of the boundary . This is the topic of the sequel (part II) to this paper. While our results for the moment concern the properties boundaries of -neighbourhoods of only planar sets , our techniques appear well-suited for obtaining local and global properties of boundaries of -neighbourhoods also in higher dimensions. It would be of particular interest to consider the above-mentioned results of Ferry [14] from this complementary point of view.
Finally, the current paper and its sequel have arisen from our interest in bifurcations of minimal invariant sets of random dynamical systems with bounded noise, which naturally appear as dynamically defined -neighbourhoods. In this context, the aim is to develop a theory which allows for the characterisations of topological and/or geometric changes of such sets in parametrised families. The results in this paper provide a characterisation of boundaries at fixed values of parameters (including ), which is a first step towards more general results concerning the classifications of qualitative changes of minimal invariant sets in (generic) parametrised families of random dynamical systems with bounded noise.
1.5. Structure of the paper
The rest of this paper is structured as follows. In Section 2 we lay out the basic conceptual framework and terminology that will be used throughout the paper. Section 2.2 contains a concise introduction to the notions and basic properties of contributors (Definition 2.1) and outward directions (Definition 2.4) and their relationship with tangential properties of the boundary .
In Section 3 we shed light on local properties of boundary points in small neighbourhoods . The key result is Proposition 3.1, which states that for the boundary geometry near each is defined solely by those that lie near the extremal contributors (Definition 2.6) of . Building on this insight and a related approximation scheme (Definition 3.3) we show that the boundary can be represented locally by a finite union of continuous graphs (Proposition 3.5). This representation plays a pivotal role in the proofs of subsequent. Section 3.3 contains an analysis of the topological and geometric structure of the complement near smooth points, wedges (S1) and shallow singularities (S4–S5).
Sections 4 and 5 contain the main results of this paper. We lay out the different types of singularities encountered on the boundary (Definition 4.1) and show how various types of singularities can be characterised in terms of the local topological structure of the complement and the geometric properties of the boundary (Propositions 4.2 and 4.5, Corollary 4.3). Section 4 culminates with the proof of our first main result (Theorem 1), by establishing the fact that the classification of singularities, provided in Definition 4.1, defines a partition of .
2. -neighbourhoods
The object of our study is the -neighbourhood of a closed subset . The main results of this paper concern -neighbourhoods of planar sets , but we provide the basic definitions in a more general -dimensional setting. Throughout the paper we make the assumption that the underlying set is closed111Note that this is not an actual restriction, since for all and . and . Many of the results require the stronger assumption of compactness; where necessary, this will be explicitly stated in the formulation of each result.
The most immediate observation regarding the structure of the set is that each necessarily lies on the boundary of a closed ball of radius , centered at some . On the other hand, for each there may exist more than one with . These considerations motivate the following definition.
Definition 2.1 (Contributor).
Let be closed. For each we define the set of contributors as the collection
Boundary points with only one contributor constitute the set
where stands for 'unique nearest point', see [13, Definition 4.1].
The set of contributors consists of those points on that minimise the distance from to . Hence can be interpreted as a restriction onto of the (set-valued) projection given by . In terms of our classification of boundary points (see Definition 4.1 and Figures 1 and 9) the set consists of smooth points and shallow singularities (S4–S5).
Definition 2.2 (Smooth point, singularity).
We call a boundary point smooth, if there exists a neighbourhood for which . If is not smooth, we call it a singularity and write .
The rationale for Definition 2.2 stems from the fact that any smooth in terms of Definition 2.2 turns out to be equivalent to having a neighbourhood in which the boundary is a -smooth curve, see Proposition 4.6.
2.1. Tangents via Outward Directions
Our first objective is to shed light on the tangential properties of individual boundary points . Acknowledging that classical tangents do not necessarily exist everywhere on the boundary, we adopt a set-valued definition of tangency which allows for several tangential directions to exist at each point. Our definition is a restriction of [13, Definition 4.3] to the boundary .
Definition 2.3 (Tangent set).
Let be closed and . We define the set of unit tangent vectors of at as all those points for which there exists a sequence of boundary points satisfying and
In order to study the existence of tangential directions at boundary points , we relate the set to what we call outward directions. Intuitively, the set of outward directions at each contains the angles at which can be approached from the complement . It turns out that for an -neighbourhood , the extremal values of these angles coincide with the tangential directions as defined in Definition 2.3. Hence the existence of tangents at each hinges on the existence and properties of corresponding outward directions, which turn out to be easier to study due to their geometric relationship with the contributors .
We define outward directions as points on the unit sphere but think of them rather as directional vectors in the ambient space , since we want to operate with them using the Euclidean scalar product .
Definition 2.4 (Outward direction).
Let be closed. We say that a point is an outward direction from at a boundary point , if there exists a sequence , for which and
as . We denote by the set of outward directions from at .


Remark 2.5.
The concept of outward directions is a variation of the well-known contingent cone, introduced by Bouligand (see for instance [2, 3, 31] and Bouligand's original work [5, 6]). For a boundary point the contingent cone (Bouligand cone) consists of those vectors , for which there exist sequences and for which for all and
as . If instead of the outward directions one considers at each the contingent cone for the complement , it follows that , where
denotes the outward cone at . We do not make use of this correspondence, but for further information on tangent cones, see for instance [8, 30].
For each we single out those outward directions that are perpendicular to some contributor —we call these the extremal outward directions and extremal contributors (see Figure 2). Definition 2.6 below emphasises this geometric relationship, while Proposition 2.12 in the next subsection confirms that extremal outward directions can equivalently be defined via the topological property of constituting the boundary of the set of outward directions .
Definition 2.6 (Extremal contributor, extremal outward direction).
Let be closed and . If an outward direction and a contributor satisfy
we call an extremal outward direction and an extremal contributor at . For each , we write and for the sets of extremal outward directions and extremal contributors, respectively.
The precise correspondence between extremal contributors, extremal outward directions, and tangential directions at each is presented in Section 2.2, where we collect in one place all the basic results that we need in the remainder of the paper. The existence of outward directions at each is established in Proposition 2.7 and their geometric relationship with the contributors is explored in Lemma 2.10 and Proposition 2.12. The coincidence of the set of tangential directions with the set of extremal outward directions is established in Proposition 2.14.
2.2. Properties of Contributors and Outward Directions
We collect here the basic properties of contributors and outward directions that we need in our analysis of the boundary . The proofs make repeated use of convergent subsequences and scalar products and are rather elementary, although at places somewhat tedious. As before, the set is assumed to be closed, and .
Proposition 2.7 (The set of outward directions is non-empty and closed).
Let be closed and . Then the set of outward directions is non-empty and closed.
Proof.
Let and choose some sequence in with . This implies for all since is closed. One may hence define a sequence in by setting for all . The compactness of implies that has a convergent subsequence, the limit of which is an element in .
To show that is closed, let and assume there exists a sequence with as . One needs to show that this implies . We first use Definition 2.4 to identify each of the directions with a convergent sequence in , and then apply a kind of diagonalisation argument in order to construct a new sequence in with .
Without loss of generality, let for all . Now, for each one can choose a sequence with and
Consequently there exists for each some , for which and for all . Using these indices one can define a new sequence by setting for each . Accordingly
so that . Furthermore, writing , we have
as . Thus is the outward direction corresponding to the sequence , which implies , as required. ∎
Despite their simplicity, the following Lemmas 2.8 and 2.9 regarding contributors are a key ingredient in many of the subsequent proofs.
Lemma 2.8 (Convergence of contributors).
Let be compact, let with , and with for all . Then there exists some and a convergent subsequence , for which as .
Proof.
Due to compactness of , there exists a convergent subsequence with as . For each ,
which implies , since , , and . On the other hand . Hence , so that . ∎
Lemma 2.9 (Tails of directed sequences).
Let be compact, with and for all , and assume
-
(i)
If for some , then there exists some , for which for all .
-
(ii)
If for all , then there exists some , for which for all .
Proof.
(i) Assume for some . Then due to the continuity of the scalar product. Hence there exists some for which and , whenever . This implies
for all so that
(ii) Assume to the contrary that there exists a subsequence . Then for each there exists some for which . Since is compact, Lemma 2.8 implies the existence of some for which (if necessary, one can switch to a further convergent subsequence). By assumption implies . Due to the continuity of the scalar product there exists some and , for which and , whenever . Then
for all , and applying the triangle-inequality with respect to the points yields
This implies the contradiction . ∎
Lemma 2.10 below provides a partial characterisation of outward directions in terms of the contributors . Geometrically it implies that outward directions point away from the vectors for all , see Figure 2.
Lemma 2.10 (Orientation of outward directions relative to contributors).
Let be compact, and . Then
-
(i)
if , then for all ,
-
(ii)
if for all , then .
Proof.
(i) If , there exists a sequence , for which and as . Assume contrary to the claim tha there exists some with . Substituting and in Lemma 2.9 (i) implies the existence of some for which for all . This contradicts the claim.
(ii) Write , and define , so that for all . Substituting and in Lemma 2.9 (ii) implies the existence of some for which for all . The sequence now defines the outward direction . ∎
Note that assuming the weaker condition for all contributors is not sufficient in Lemma 2.10 (ii). For example, let and consider the set with . Then with and has only one outward direction . Here also satisfies for , and yet . This example illustrates the difference between and the -boundary (see Section 1.1), since here . See also [27, Example 2.1].
In order to describe the geometry of the sets of outward directions on the circle , we introduce the concept of a geodesic arc-segment. Intuitively, a geodesic arc-segment is the shortest curve on that connects two points .
Definition 2.11 (Geodesic arc-segment).
Let and let
| (2.1) |
For , the set defines a geodesic arc-segment between and . We also define the corresponding open geodesic arc-segment as
| (2.2) |
We use the notations and in accordance with (2.1) and (2.2) also for the cases and , even though the corresponding sets in these cases are not arc-segments.
Unlike the previous results in this section, we formulate and prove the statements in Proposition 2.12 and Lemma 2.13 below only for the two-dimensional case. Note also that Proposition 2.12 is formulated for a compact set , but essentially the same proof works for any closed set due to the local nature of the result.
Proposition 2.12 (Structure of sets of outward directions).
Let be compact and . Then the set of outward directions satisfies the following.
-
(i)
If , then ;
-
(ii)
If , then , where are the only extremal outward directions at , possibly satisfying .
Proof.
(i) Since , Lemma 2.10 (ii) implies
Then due to continuity of the scalar product, and Lemmas 2.7 and 2.10 (i) imply , as claimed.
(ii) Assume then that contains at least two points. We assert that
-
(a)
if and , then for all ,
-
(b)
if and only if for all ,
-
(c)
.
(a) If or for some , the claim is true since .
Let with and define a parametrised curve by
Clearly , and . For each , consider the scalar product
| (2.3) | ||||
| (2.4) |
We show that for every and all . We have for all and all , since Lemma 2.10 (i) guarantees
for all . For , equation (2.3) implies when . On the other hand, if , equation (2.4) implies
Hence the inequality holds if and only if . This shows that for arbitrary , whenever .
(b) If satisfies for all , then there exists some for which for all . To show this, assume to the contrary that for each there exists some for which
Since is compact and is closed, there exists a convergent subsequence with . On the other hand, due to the continuity of the scalar product we have
which contradicts the assumption that for all .
Assume now that for all and that has been chosen so that for all . The continuity of the scalar product implies that for some , depending on , one has for all that satisfy . Hence has an open neighbourhood satisfying , which implies .
For the other direction, assume . Then there exist , for which . Step (a) consequently implies for all .
(c) It follows from steps (a) and (b) that . This in turn implies , when , and (singleton), when .∎
Proposition 2.12 thus gives the following geometric picture of the set of extremal outward directions. In the case of a sharp singularity (S2) or a chain singularity (S6) (see Figure 1 and Definition 4.1), the set of extremal outward directions is a singleton for some . Otherwise contains two points, which may point directly away from each other or form an acute or obtuse angle.
Lemma 2.13 below summarises the limiting behaviour of outward directions and contributors of points that appear in convergent sequences on the -neighbourhood boundary. In particular, Lemma 2.13 (ii)(a) establishes that for each the set of tangent vectors is a subset of the set of extremal outward directions. According to Proposition 2.14 these sets in fact coincide for all .
Lemma 2.13 (Orientation in converging sequences of boundary points).
Let be compact and let . Furthermore, let be a sequence on with and define for all . Then the following statements hold true:
-
(i)
The sequence can be split into two disjoint, convergent subsequences , where and .
-
(ii)
If the limit exists, then
-
(a)
every sequence in with for all has a convergent subsequence for which . Furthermore and consequently .
-
(b)
every sequence in with for all satisfies
-
(a)
Proof.
(ii)(a) Due to Lemma 2.8, there exists some and a convergent subsequence , for which . We break the proof into three steps.
Step 1. : Assume contrary to the claim that . Then substituting and in Lemma 2.9 (1) implies that for some we have for all . This contradicts the assumption for all .
Step 2. : Assume contrary to the claim that . The continuity of the scalar product then implies that there exists some for which for all . Applying the triangle-inequality with respect to the points yields
for all . This implies the contradiction .
Step 3. : For each , write . Since there exists for each some . Then so that . Steps 1. and 2. together imply so that (see Definition 2.6). This concludes the proof of (ii)(a).
(ii)(b) Assume contrary to the claim that there exists some and a subsequence , for which for all . This implies that if with , there exists some , depending on , for which
| (2.5) |
for infinitely many . On the other hand property (ii)(a) implies the existence of a subsequence for which the limit exists and satisfies . Inequality (2.5) now leads to the contradiction
(i) According to (ii)(a) every convergent subsequence satisfies as . For (a singleton) this implies and the claim follows. In case for some , write . The compactness of implies that there exists some , for which
for all . For each , define . If is finite for some , we have for and the claim follows. Otherwise the sequences and are disjoint and satisfy for . ∎
Proposition 2.14 (Extremal outward directions coincide with tangents).
Let be compact and let . Then .
Proof.
Lemma 2.13 (ii)(a) implies , so we are left with proving the other direction. Assume . Then there exists a sequence , for which
as . Since is an extremal outward direction, there exists some extremal contributor for which . Let and define , where
It follows from the orthogonality of and that . Furthermore for all , since . See figure 3.
Consider now the -radius circle centered at . The geodesic arc-segment (shortest path) on this circle that connects the points and must necessarily contain a boundary point .


Let . Since and , there exists some for which
| (2.6) |
whenever . Since
as , we can choose some for which the inequality as well as the estimates (2.6) hold for all . It follows from the definition of the points that for all . This allows us to obtain the estimate
which is valid for all . Since also for all , we see that fulfils the requirements of Definition 2.3, so that . ∎
3. Local Structure of the Boundary
In this section we utilise the results obtained in Section 2 regarding outward directions and contributors in order to analyse the local properties of the boundary .
We begin by proving a local contribution property, Proposition 3.1, which intuitively states that in order to describe the local geometry of near a boundary point it suffices to consider the geometry of around the extremal contributors .
In Section 3.2 we develop a method for approximating the set with finite collections of balls that correspond to certain finite subsets . Combining this idea with Proposition 3.1 we proceed to show in Proposition 3.5 that local representations for the boundary may be obtained using finite collections of curves that can be represented as graphs of continuous functions on a compact interval.
As the first application of Proposition 3.5 we show in Lemma 3.8 that for every and every wedge (see Definition 4.1 and Figure 1) there exists a unique connected component of the complement for which .


3.1. Local Contribution
Intuitively, one can give a crude approximation for the boundary around each by considering the boundaries centered at the contributors , and zooming in on a suitably small neighbourhood , in which
| (3.1) |
However, inside any neighbourhood the geometry of the -neighbourhood is not defined solely by the positions of the contributors (see Figures 4 and 5). Hence one needs to consider at least all the contributors in some neighbourhood of the set of extremal contributors . Proposition 3.1 below confirms that this is indeed sufficient.
We introduce here the following notation for open -centered half-balls oriented in the direction of some :
| (3.2) |
Proposition 3.1 (Local contribution).
Let and with , where we allow . Then for all there exists some such that given , we have if and only if either
| (3.3) | ||||
| (3.4) |
Proof.
Assume to the contrary that there exists some , for which the claim fails. This means that for all there exists some , for which either
- (1)
- (2)
This implies that there exists a sequence with , for which either condition (1) or (2) holds true for for infinitely many indices . A corresponding subsequence then satisfies as and either
- (a)
- (b)
We proceed by showing that both of these statements lead to a contradiction. In both cases one can assume, without loss of generality, the existence of the limit

Assume first that (a) holds true. This means that
| (3.5) |
for all . Since for all , one can choose a sequence with . In addition, since , Lemma 2.8 guarantees the existence of a convergent subsequence with the limit . Note that it follows from (3.5) that for all , which implies , and consequently . This rules out the possibility for the extremal outward directions , and therefore
| (3.6) |
The relations (3.5) guarantee that , which together with Lemma 2.9 (i) implies for all extremal contributors . Combined with the assumption that
for all , this implies that (see Proposition 2.12), where is a geodesic arc-segment due to (3.6). It follows that , since . But now a computation analogous to that presented in the proof of Lemma 2.9 (ii) leads to the contradiction .
Assume then that (b) holds true. Now for all so that . In addition, given that either (3.3) or (3.4) is satisfied for each and (3.4) implies , condition (3.3) necessarily holds true for all . Then , since leads to the contradiction
On the other hand, if , Proposition 2.12 states that can be written as a convex combination . Note that at least one of the coefficients must be strictly positive, since . However, (3.3) implies for and all , which leads to the contradiction for . ∎
3.2. Approximating the Boundary with Continuous Graphs
In order to study the properties of the boundary , we develop a finite approximation scheme as a technical aid. The idea is to generate an expanding sequence of finite subsets and consider their -neighbourhoods , whose boundaries approximate the actual boundary uniformly with respect to Hausdorff distance.
Definition 3.2 (Hausdorff distance).
The Hausdorff distance between is
where .
Let be compact, and with . Consider for natural numbers the partitions of into squares
Due to the Axiom of Choice, there exists a non-decreasing sequence of subsets of of such that
where the points are chosen arbitrarily from . It is easy to verify that and that the approximations converge to in Hausdorff distance,
| (3.7) |


Definition 3.3 (Finite approximating sets).
Let be compact and let be a sequence of subsets as described above. Then the sets are called finite approximating sets for the set .
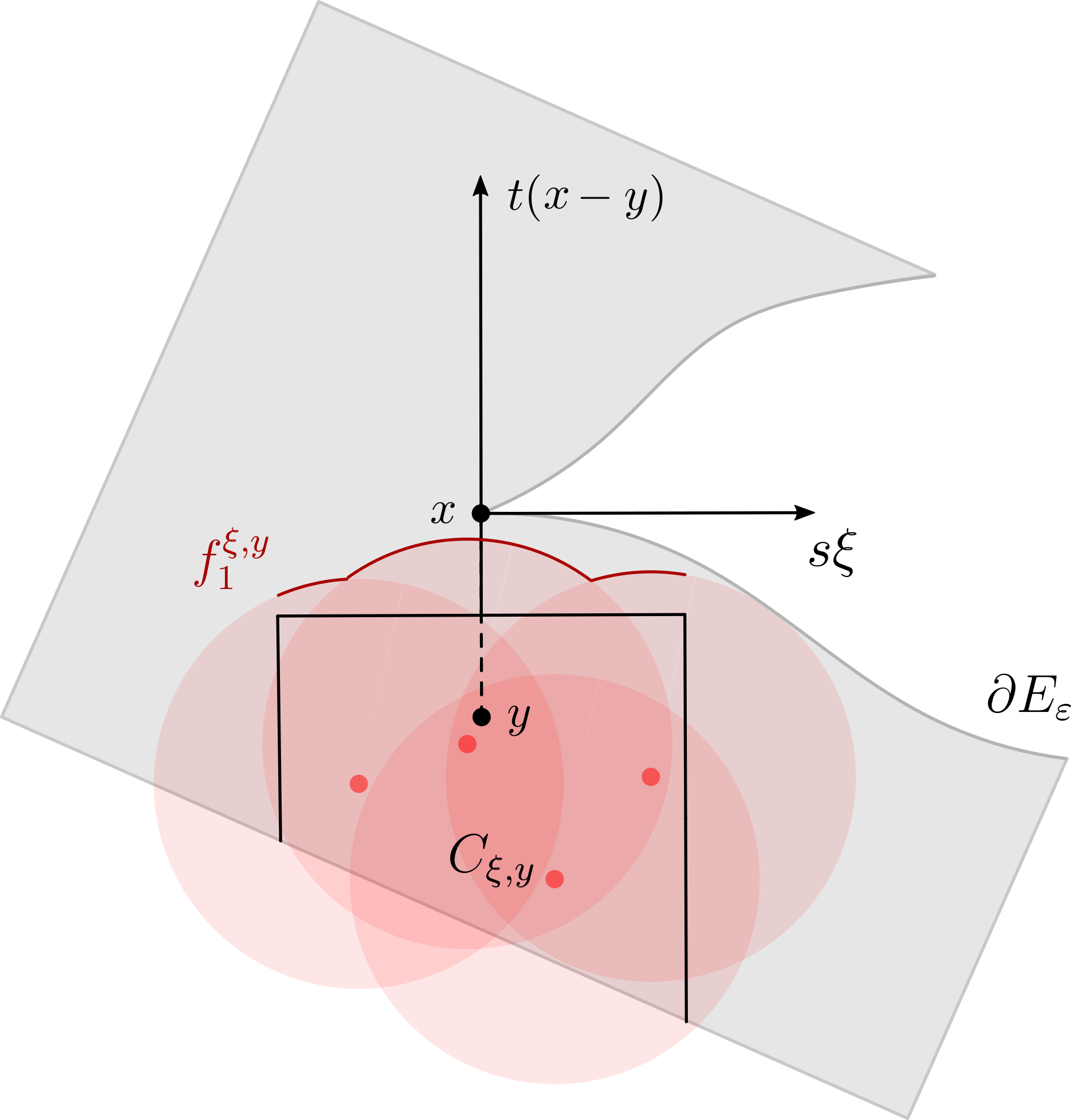
We now have the necessary ingredients in place for defining what we call local boundary representations near each boundary point . The local contribution property, Proposition 3.1, implies that in order to describe the boundary near , one only needs to consider contributors around the extremal contributors . The extremal outward directions together with their corresponding extremal contributors form extremal pairs that represent coordinate axes adapted to the orientation of the boundary near .
Definition 3.4 (Extremal pairs).
Let be closed, let and denote by and the sets of extremal outward directions and extremal contributors, respectively. We define the set of extremal pairs at as the collection
One can thus choose a finite approximating sequence , interpret the boundaries near as graphs of continuous functions in the coordinate system and obtain, as a uniform limit, a continuous function whose graph serves as a representation of a part of the boundary near . Using this construction for each extremal pair one obtains a finite set of continuous graphs that give a complete representation of the boundary near .
We note that the proof of Proposition 3.5 below makes use of Lemma 3.7 which we have placed in the subsequent Section 3.3, together with other results on the geometry of the complement .
Proposition 3.5 (Local boundary representation).
Let be closed and let . For each extremal pair there exists a continuous function and a corresponding function , given by
| (3.8) |
so that the collection satisfies
| (3.9) |
for some and some closed . We call the collection a local boundary representation (of radius ) at . For each extremal pair the corresponding subset is either
-
(a)
an interval for some , or
-
(b)
a closed set whose complement in contains a sequence of disjoint open intervals with as an accumulation point.
For wedges (type S1) and , case (a) above holds true for all .
Proof.
Define for each extremal pair the sets
Consider a sequence of finite approximating sets for the set (see Definition 3.3), and define for each . Using the sets we define a sequence of functions by setting
| (3.10) |
where denotes the Euclidean distance from the set . The maximum in (3.10) exists for all due to the compactness of , which also implies that the functions are bounded for all . In addition, it follows from the definition of the values that
for all . Since for each the boundary is composed of a finite collection of arc-segments, the corresponding functions are continuous.
It is easy to verify that the boundaries converge to the boundary uniformly in Hausdorff distance. Similarly the boundaries converge uniformly to the boundaries . Hence is a uniformly convergent, monotonically increasing sequence of continuous functions on the compact interval , which implies that the limiting function
| (3.11) |
is continuous. One can therefore define for each a function by
| (3.12) |
The remainder of the proof concerns the analysis of the relationship between the graphs and the boundary near the point , with the aim of identifying subsets that satisfy (3.9).

Substituting in Proposition 3.1 guarantees the existence of some , for which if and only if either
According to Proposition 2.14, the set of tangential directions coincides with the set of extremal outward directions . This implies that condition (i) necessarily fails for all boundary points . Therefore condition (ii) holds true whenever , in which case for some . Hence there exists some , for which . In other words, every boundary point inside the neighbourhood lies on one of the graphs with .
It remains to be verified, for each , which arguments satisfy . We divide the rest of the proof into two cases, depending on whether or not there exist extremal contributors for which
| (3.13) |
Condition (3.13) is schematically illustrated in Figure 9 (c) below.
(i) In case (3.13) is not satisfied by any , there is either only one contributor so that , or else is a wedge (see Definition 4.1). In both cases we have for some and , where we allow for in case . It follows from Lemma 3.7 that for any outward directions there exists a neighbourhood in which the graphs of and are separated by the cone . Hence
| (3.14) |
For we define the upper bounds
and the corresponding sets . It follows then from (3.14) and Proposition 3.1 that for , which implies
(ii) Assume then that (3.13) holds true for and consider some . In this case the graphs , may generally intersect for arbitrarily small . Due to (3.13) one can write for
where . Hence it follows for from Proposition 3.1 and the definitions of the functions and (see (3.10) and (3.11)) that
For one has if and only if there exists a sequence with , for which for all . This follows from the fact that
whenever , and . Equation (3.9) is therefore satisfied for the neighbourhood and the sets
where and . Now either for some or otherwise for all . In any case is an accumulation point of , since and (see Proposition 2.14). ∎
Consider a boundary point and the corresponding local boundary representation with radius , and let with
for some and . The construction given in Proposition 3.5 guarantees that, when written in the -coordinates, the -coordinate of each contributor satisfies . This implies a lower and upper bound for the local growth-rate of the function . Combining this observation with Proposition 2.14 allows us to deduce that the functions in (3.8) are in fact Lipschitz continuous on for all , with a Lipschitz constant .
Proposition 3.6 (Local boundary representation is Lipschitz).
Let , let and let be a local boundary representation at with radius . For each extremal pair , the function in (3.8) is -Lipschitz, and the function is -Lipschitz on the interval .
Proof.
In order to work in an orthonormal coordinate system, we define for all the functions by setting so that
for all . We will show that the functions are -Lipschitz, from which the claim follows.
Assume contrary to the claim that for some there exist some and for which . We present the argument for the case and . Assuming leads to a contradiction through similar reasoning. Write and define
so that . For we define inductively and
so that for all
| (3.15) |
By construction, the sequence is non-increasing, and the sequence non-decreasing. Since as and for all , there exists a unique limit . From (3.15) it follows that
| (3.16) |
where the coefficients
satisfy for all . In case (resp. ) for some , the coefficient (resp. ) vanishes for all . Hence at least one and possibly both of the right and left derivatives of at are given by
and correspond to the tangential directions on at . According to Proposition 2.14 these in turn coincide with the extremal outward directions and at . Since the -coordinates of the corresponding extremal contributors lie on the interval , the directional derivatives necessarily satisfy the upper bound (see Figure LABEL:Figure_Maximal_Tangent)
The contradiction follows by taking the limit in (3.16).
It follows from the above reasoning that for all and each the functions are -Lipschitz, since for any

3.3. Local Structure of the Complement
In this section we analyse the connectedness of the complement near points and wedges. For these points Lemma 3.8 guarantees the existence of a unique connected component for which , while Proposition 3.9 makes the stronger statement that in fact for some connected and neighbourhood .
Lemma 3.7 (Approximations of the outward cone).
Let , let and define for each the truncated cone
Then there exists for which .
Proof.
Assume to the contrary that for each there exists . Then as and we may assume without loss of generality that
Since , Proposition 2.12 implies , which together with Lemma 2.10 (i) gives for all . It follows then from Lemma 2.9 (ii) that there exists , for which for all , which contradicts the assumption. ∎
Lemma 3.8 (Unique connected component).
Let and let either be a wedge (type S1) or . Then there exists a unique connected component , for which .
Proof.
Since whenever is a wedge or , there exist outward directions . Lemma 3.7 then guarantees the existence of some for which the truncated open cone
| (3.17) |
satisfies . Consequently there exists a connected component with and .
For each , let be the continuous function corresponding to the local boundary representation (see equation 3.8 in Proposition 3.5). To prove uniqueness, assume contrary to the claim that there exists another connected component with and . Then for at least one there exist arbitrarily small coordinates for which
for some . Since the outward directions in the definition of the cone above may be chosen arbitrarily close to the extremal outward directions, it follows that for all sufficiently small there also exist coordinates for which
It follows then from and the definition of the local boundary representation that in fact
for all . But this contradicts the assumption that and are both connected and . ∎
Proposition 3.9 (Geometry of the complement).
Let and let either be a wedge or . Then there exists some , for which
| (3.18) |
where is connected and for each either or for and , , where .
Proof.
According to Proposition 3.5 we may assume that has a local boundary representation with radius for which the functions are of the form
with the functions continuous. We divide the proof into two parts depending on whether is a wedge or .
(i) Assume first that with . Then where and
for . Consider for each the distances
Due to Proposition 2.14 and Lemma 2.13 (i) we can assume to be small enough so that both and are strictly increasing on . One can thus define for each the points by
According to Lemma 3.8 there exists a unique connected component of for which , and due to Proposition 3.1 we can assume to be sufficiently small so that
This implies that for each the geodesic curve segment
satisfies
Hence
(ii) Let then be a wedge. As above, one can assume that the distances
are strictly increasing in . Furthermore, since , one may define the average . Due to Lemma 2.13 (i) and that fact that , we may assume to be small enough so that the boundary segments represented by the functions are separated by the line segment in the neighbourhood .
4. Classification of Boundary Points
In this section we present a classification of the boundary points based on their local geometric and topological properties. Using the results obtained in Sections 2 and 3 above, we prove our first main result, Theorem 1, which states that the classification given in Definition 4.1 defines a partition of the boundary into disjoint subsets.
The geometric aspect of the classification scheme relies on the orientation of the extremal contributors at each boundary point . In the planar case, there are essentially three different ways this orientation can be realised, depicted schematically in Figure 9 below. The defining property for the extremal contributors in case (c) can be equivalently expressed by , and we will make use of both formulations in what follows.



4.1. Types of Singularities
The classification of singularities is given in Definition 4.1 below. Schematic illustrations of the different types of singularities are given in Figure 1 in the Introduction. Recall that denotes an open -centered half-ball of radius oriented in the direction of (see (3.2)). We denote by the set of singularities on the boundary .
Definition 4.1 (Types of singularities).
Let be closed, let and let be the set of extremal outward directions, where we allow for the possibility . We define the following eight types of singularities.
-
S1:
is a wedge, if , i.e. the angle between the vectors satisfies ;
-
S2:
is a (one-sided) sharp singularity, if , and there exists some for which the intersection is a connected set;
-
S3:
is a sharp-sharp singularity, if and for each there exists some for which the intersection is a connected set;
-
S4:
is a (one-sided) shallow singularity if and
-
(i)
for some , and
-
(ii)
for all .
-
(i)
-
S5:
is a shallow-shallow singularity if and for all and .
-
S6:
is a (one-sided) chain singularity, if and there exists a sequence of singularities , for which and
where is the set of extremal contributors at each ;
-
S7:
is a chain-chain singularity, if and for each there exists some and a sequence , for which and
where is the set of extremal contributors at each ;
-
S8:
is a sharp-chain singularity, if and
-
(i)
there exists a for which the intersection is a connected set, and
-
(ii)
there exists some and a sequence , for which and
where is the set of extremal contributors at each .
-
(i)
Note that S8 may be interpreted both as a sharp singularity and as a chain singularity. Theorem 3 below states that the set is closed, while on the other hand all the singularities of type S8 share an important property with those of type S1–S5: they all lie on the boundary of some connected component of the complement . We show in Corollary 4.3 that this is exactly the property that is lacking from singularities of type S6 and S7 (see also Remark 4.4 below).
Motivated by these considerations we define a boundary point to be
-
(i)
a sharp singularity, if it is of type S2, S3 or S8,
-
(ii)
a chain singularity, if it is of type S6, S7 or S8, and
-
(iii)
an inaccessible singularity, if it is of type S6 or S7.
The typology presented above is neither strictly topological nor strictly geometric. If one wanted to accomplish a strictly topological classification for neighbourhoods for some , types S6–S8 would necessitate an infinite tree-like classification scheme, in order to account for the potentially accumulating chain and shallow singularities in arbitrarily small neighbourhoods with (see Section 5.2 and Theorem 3).
4.2. Classification of Singularities
Proposition 4.2 below provides a characterisation of the topological and geometric structure of the complement near those singularities , whose extremal contributors satisfy . Geometrically these correspond to case (c) in Figure 9.
Proposition 4.2 (Difference between sharp-type and chain-type geometry).
Let , and with . Furthermore, let be a local boundary representation with radius at , let and let be as in (3.8). Then exactly one of the cases (i) and (ii) below holds true:
-
(i)
(sharp-type) There exists some , for which for all , and
(4.1) where is the unique connected component of intersecting , for all and as .
-
(ii)
(chain-type) There exists a sequence with the following properties:
-
(a)
and for all . We denote this common value by .
-
(b)
There exists some and a sequence of disjoint connected components of with as and for all .
-
(c)
for each , with
(4.2) where for all .
-
(a)
Proof.
Clearly, either there exists some , for which for all , or else there exists a sequence with , for which for all , and these cases are mutually exclusive. The proof amounts to showing that in the former case representation (4.1) is valid for some connected component and arc-segments , and in the latter, to identifying the prescribed sequences and as well as confirming the limit (4.2) and that for all .
Consider for the continuous functions for which
(see Proposition 3.5). The assumption implies that the vector representing the difference at between the graphs and , is given by
| (4.3) |
(i) We start by assuming that there exists some , for which for all which implies for all . Due to continuity, this implies either
Note that (1) would contradict the assumption , so that (2) necessarily holds true. Hence the average , given by
| (4.4) |
satisfies for all . Note that although we have defined the function in (4.4) in terms of the contributor , we could have equally well chosen due to symmetry. Combining the facts that is continuous, and , we may deduce that there exists a connected component for which and . Emulating the reasoning presented in the proof of Lemma 3.8 allows one to confirm that is the only connected component of that intersects .
To obtain representation (4.1), consider for each the unit vectors , given by
| (4.5) |
Due to Proposition 2.14 and Lemma 2.13 (i) we know that the boundary aligns itself with the extremal outward directions near each boundary point . We can hence assume to be small enough such that the distances
appearing in the divisors in (4.5) are all strictly increasing in on the interval . By definition we also have for all .
Hence, for each
In addition, we can assume Proposition 3.1 to apply at with the choices and . From this it follows for that
for all . Hence
(ii) Assume then that there exists a sequence for which for all and . This situation corresponds to the chain-type geometry characteristic of chain singularities (types S6–S8; see Definition 4.1 and Figure 1). Note that since and , there exists for all some , for which . One can thus define two new sequences and inductively as follows. First, choose some with and define
For the induction step, assume we have already chosen the points and for some . One can then choose some with , and define
Then for all and for all . Also, by definition, for all and . This implies that for each the open set
is connected and satisfies . In addition whenever , and for every there exists some , for which for all . It thus follows from Propositions 2.14 and Lemma 2.13 (i) that as .
Since for each , there exist for extremal contributors , for which . This, together with Lemma 2.13 (ii)(a), implies for as , and consequently
As a consequence of Proposition 4.2 we obtain the following characterisation for inaccessible boundary points , which are defined by the property that for all connected components of the complement .
Corollary 4.3 (Inaccessible singularities).
Let and . Then for all connected components of the complement if and only if is a one-sided chain singularity (S6) or a chain-chain singularity (S7).
Proof.
Assume first that for all connected components of the complement . Proposition 3.9 then implies that is not a wedge and , so that the extremal contributors satisfy .
In case has only one extremal outward direction , Proposition 3.1 implies the existence of some for which . By assumption there cannot exist any connected component described in case (i) of Proposition 4.2, which implies that case (ii) holds. Hence is a (one-sided) chain singularity.
If, on the other hand, there exist extremal outward directions with , Proposition 4.2 again rules out case (i) for each one of them, and consequently fulfils the definition of a chain-chain singularity.
Assume then that is either a one-sided chain singularity (S6) or a chain-chain singularity (S7). In the former case for some , and Proposition 3.1 again implies the existence of some for which . We aim to deduce a contradiction by assuming there exists a connected for which . Note that every has a representation
| (4.6) |
for some and . Now choose some and so that . Given that is connected and , it follows from that there exists a path for which and . Following (4.6), we may write
where the coordinate depends continuously on . Since for all , Proposition 3.5 implies that the coordinate satisfies for all , where the functions are as in Proposition 3.5. However, Proposition 4.2 implies the existence of some for which , and since is continuous as a function of , there exists some for which . For this coordinate we thus obtain the contradiction .
In case is a chain-chain singularity (S7), one may again follow the above reasoning to deduce that the existence of a connected component of with would contradict the existence of a sequence with , which is on the other hand guaranteed for both by Proposition 4.2. ∎
Remark 4.4.
Corollary 4.3 states that it is impossible for a chain singularity (S6) or a chain-chain singularity (S7) to lie on the boundary of any connected component , even though a sequence of connected components converges to in Hausdorff distance. This is the motivation for the terminology of inaccessible singularities and can be seen as an analogue of the distinction between accessible and inaccessible points in a Cantor set , where inaccessible points do not lie on the boundary of any of the countably many removed open intervals . See also Example 5.7 and the discussion after Definition 4.1 above.
Proposition 4.5 (Characterisation of chain singularities).
Let , let and let be a local boundary representation at with the functions as in (3.8). Then the following are equivalent:
-
(i)
is a chain singularity (type S6, S7 or S8).
-
(ii)
There exists a sequence of mutually disjoint connected components for which as .
-
(iii)
There exists a sequence of singularities on for which and
(4.7) where for each .
-
(iv)
The extremal contributors satisfy and there exist some and corresponding functions for which for all for some sequence with as .
Proof.
We begin by showing that (ii) (iv) (iii) (ii). Since clearly (i) implies (iii), the result then follows by showing that (iii) (iv) (i).
(ii) (iv). Assume there exists a sequence of mutually disjoint connected components of the complement with as . It follows then from Proposition 3.9 that and it cannot be a wedge, which implies for the extremal contributors .
For each , choose a point , and define . Due to compactness, one can choose a subsequence for which . Since for all , it follows from Lemma 2.9 that for , so that .
Assume contrary to the claim that there exists for which for all . According to Proposition 4.2 this implies
| (4.8) |
where is the unique connected component of the complement that intersects . Since as , equation (4.8) now implies for large , which in turn contradicts the assumption that the sets are connected and mutually disjoint. Hence, no such can exist, and (iv) follows.
(iv) (iii). Case (ii) in Proposition 4.2 now holds true, and directly implies (iii) here.
(iii) (ii). Write and define . Due to Lemma 2.13 (i) there exists a subsequence , for which as . Furthermore, since for all , Lemma 2.13 (ii)(a) together with (4.7) implies the existence of a further subsequence for which for . Hence .
To complete the argument we show that for any there exists some for which . Once this is established, the statement follows from Proposition 4.2. Since as , there exists for all some for which for all . Hence there exists for all some for which for some . But since for as , where , we have in fact for all sufficiently large .
(iii) (iv) (i). Since for the extremal contributors , it follows from Lemma 2.10 that the extremal outward directions satisfy either or . In the former case is a one-sided chain singularity (S6). In the latter case we may assume without loss of generality that . Proposition 4.2 then states that for some , the boundary subset exhibits either 'sharp'-type or 'chain'-type geometry and that these cases are mutually exclusive. In the former case is a sharp-chain singularity (S8), in the latter a chain-chain singularity (S7). ∎
We employ Proposition 4.5 to show that our definition of smooth points (see Definition 2.2) coincides with the property of lying on a -smooth curve. By a curve we mean the image of a continuous, injective map .
Proposition 4.6 (Characterisation of smooth points).
Let and . Then is smooth in the sense of Definition 2.2 if and only if there exists a -curve for which for some .
Proof.
According to Proposition 3.5 there exists a local boundary representation with radius and continuous functions for which
for all and .
(i) Assume first that is smooth in the sense of Definition 2.2. Then there exists for which . Proposition 2.12 then implies that for all the set of extremal outward directions satisfies for some . According to Proposition 2.14, the extremal outward directions coincide with tangential directions on the boundary, and hence implies that is differentiable at , where . Since this is true for all , the boundary inside is contained in the union of images under the differentiable maps and . Since and both images can be represented as graphs of the corresponding functions for , the claim follows.
(ii) Let then be a -curve for which for some . Then for each , Proposition 2.14 implies for some . Consider now some . Since is -smooth, the correspondence between tangents and extremal outward directions given by Proposition 2.14 implies that is not a wedge (S1) or a sharp singularity (S2–S3). On the other hand, as a curve is connected, which together with Proposition 4.5 implies that cannot be a chain singularity (S6–S8). Hence it follows from Theorem 1 below that is necessarily either a smooth point or a shallow (S4–S5) singularity, which implies . The same argument applies to all , which means that is smooth in the sense of Definition 2.2. ∎
4.2.1. Proof of Theorem 1
We conclude this section with the proof of our first main result, a classification of boundary points on . We restate the result here for the convenience of the reader.
Theorem 1 (Classification of boundary points).
Let be compact, and let be a boundary point of that is not smooth. Then belongs to precisely one of the eight categories of singularities given in Definition 4.1.
Proof.
Note first that for any either , , or . Hence we obtain the following categorisation of boundary point types according to the orientation of the extremal outward directions :
| type S1 | ||||
| types S2 and S6 | ||||
| smooth points and types S3–S5, S7–S8 |
These are due to Proposition 2.12 for and Definition 4.1 for , and they correspond to the cases (a)–(c) illustrated in Figure 9. It follows immediately that if is a wedge (S1), it cannot be of any other type, and vice versa. In addition, of all the defined types of boundary points, only the shallow singularities (S4 and S5) and smooth points satisfy for some , and these types are by definition mutually exclusive.
Hence it suffices to show that the remaining types S2–S3 and S6–S8 (corresponding to case (c) in Figure 9) are mutually exclusive. For all these types, the set of extremal contributors satisfies . Proposition 4.2 then states that for each either
-
(i)
there exists a connected component and for which and , or
-
(ii)
there exists a sequence of singularities in with as and , and
and that these situations are mutually exclusive. In other words, for each extremal outward direction , the intersection exhibits either 'sharp'-type or 'chain'-type geometry (see Definition 4.1). In case , the point is hence either a sharp (S2) or a chain (S6) singularity, and in case , it is either a sharp-sharp (S3), a chain-chain (S7), or a sharp-chain (S8) singularity, and all these cases are mutually exclusive. ∎
5. Topological Structure of the Set of Singularities
Since the categories of boundary points given in Definition 4.1 define a partition of the boundary, it makes sense to inquire on their cardinalities and topological structure. Our second main result, Theorem 2, states that for any compact and , the sets of wedges (S1), sharp singularities (S2, S3 and S8) and one-sided chain singularities (S6) on are at most countably infinite. This does not hold in general for the sets of shallow-shallow singularities (S5) or chain-chain singularities (S7), which may even have a positive one-dimensional Hausdorff measure on the boundary (see [14, 15]). In Section 5.2 we show that the set of chain singularities is nevertheless nowhere dense, and hence small in the topological sense.
5.1. Cardinalities of Sets of Singularities
In order to prove the above-mentioned results on the cardinalities of the sets of singularities, we proceed by treating one by one the cases of wedges, sharp singularities, and one-sided shallow and chain singularities. We begin with the following general result on the geometry of accumulating singularities, which is essentially a corollary of Lemma 2.13 on the asymptotic behaviour of sequences of boundary points.
Lemma 5.1 (Geometry of accumulating singularities).
Let , let be a sequence of pair-wise disjoint singularities with and let for each . Then .
Proof.
Due to Lemma 2.13 (i) we can assume that the limit exists. Note that depending on the geometry at the singularities , each of the extremal outward directions for may be more aligned with than , or vice versa. However, for each , Lemma 2.13 (ii)(b) implies that there exist sequences of coefficients for which and
| (5.1) |
Let be the angle for which . Equation (5.1) implies for , and in particular there exists some for which for all . Writing for , we have
| (5.2) |
as , and the result follows. ∎
A particular consequence of Lemma 5.1 is that accumulating wedges (S1) become increasingly acute/obtuse as they approach a limit point, with the angles between the extremal outward directions approaching an asymptotic value . It follows that for any fixed , there can only exist finitely many wedges whose sharpness deviates from these asymptotic values by more than , which in turn implies that the total number of wedges can at most be countably infinite. Lemma 5.2 below makes this argument precise.
Lemma 5.2 (Number of wedges).
For any compact and , the number of wedges (S1) on is at most countably infinite.
Proof.
We begin by showing that for each , the subset defined by
contains only finitely many points. Assume contrary to this that for some the set contains infinitely many points. This implies that there exists a pair-wise disjoint sequence with for all , and due to compactness of we may assume that as . Writing for each , Lemma 5.1 then implies , contradicting the assumption that for all .
By definition, each wedge belongs to the set for some . Hence the union
contains all the wedges on . According to the reasoning above, each of the sets contains only finitely many points, from which the result follows. ∎
We next show that for a given connected component of the complement , there can only exist finitely many sharp singularities on . This essentially follows from Propositions 3.5 and 4.5 which imply that any convergent sequence of pairwise disjoint sharp singularities is associated with a sequence of pairwise disjoint connected components of , aligned with one of the extremal outward directions and satisfying and for all (or, to be precise, at least from some onwards). Negotiating the topological and geometric constraints of the situation would then require that for all , which is clearly impossible.
Lemma 5.3 (Number of sharp singularities).
Let be compact. For any connected component of the complement , the number of sharp singularities (S2, S3 and S8) on the boundary is finite.
Proof.
Assume that the claim fails for some connected . Since is compact, this implies the existence of a pair-wise disjoint sequence of sharp singularities with . We may furthermore assume that the sequence is ordered so that
| (5.3) |
for all , and that the limit exists. Write . It follows from the definition of a sharp singularity that
| (5.4) |
for all . According to Proposition 4.5, also the extremal contributors satisfy , and for as . Let be the local boundary representation (of radius ) at , given by Proposition 3.5, and consider for the functions ,
where the functions are continuous. Due to equation (5.4), and since , there exists a sequence with and some , for which implies and consequently . Inequality (5.3) implies for all , and one can define the open sets
For each , the set is contained in the interior of the closed rectangle
By definition for all , from which it follows that for any open . On the other hand for all which implies for all , since is connected and by definition. However, given that , this leads to the contradiction for all . ∎
Lemmas 5.4 and 5.6 below state that the sets of one-sided shallow singularities (S4) and chain singularities (S6) are both at most countably infinite. The argument in both cases rests on the fact that for any finite sum of non-negative real numbers indexed by a (potentially uncountable) set , the index subset corresponding to the positive elements in the sum is at most countably infinite.222This follows from the observation that the set is finite for each and hence is countable as a countable union of finite sets. In the case of shallow singularities, the numbers being summed will represent lengths (one-dimensional Hausdorff measures) of boundary segments , and in the case of chain singularities they will stand for surface areas of open subsets . In each case, these numbers will be strictly positive by definition for every , implying that the underlying index sets—corresponding to the sets of singularities in question—are themselves at most countably infinite.
Lemma 5.4 (Number of one-sided shallow singularities).
For a compact set , the number of one-sided shallow singularities (S4) on is at most countably infinite.
Proof.
Write for the set of one-sided shallow singularities on , and consider some . By definition of a one-sided shallow singularity, there exists a and for which . Due to Proposition 3.5 there exists a local boundary representation and some some for which , where and , satisfies
for some continuous . In particular, the open subsegment contains only smooth points and has a positive, finite length . This follows for instance from the fact that satisfies for all (see Proposition 3.6) and since the increase of the Hausdorff measure under a Lipschitz map is bounded by the Lipschitz constant (see for instance [1, Proposition 2.49]). If is another one-sided shallow singularity, the corresponding segment satisfies by definition. Hence, the collection has finite length
| (5.5) |
The last inequality in (5.5) was established already by Erdős in [11, Section 6]. According to the counting argument preceding the statement of the result, inequality (5.5) implies that the set can be at most countably infinite. ∎
The following example demonstrates that the set of two-sided shallow singularities (S5) can be dense and have positive Hausdorff measure on the boundary . The idea is to construct a suitably jagged function on the interval (say) and interpret its graph as a subset of the boundary of a corresponding set .
Example 5.5 (Dense, positive measure set of shallow singularities).
Consider a bounded, increasing function that is discontinuous at every rational number but continuous at every irrational number .333One way to construct such a function is to write , define , take any positive summable sequence , and set for all . This way is increasing on , has a jump of amplitude at each rational , is continuous at every , and satisfies . As an almost everywhere continuous bounded function, every such is Riemann-integrable, and its monotonicity implies that the integral function is convex. Most significantly for our example, has a well-defined derivative at every irrational , but not at any rational .
For any , one may thus interpret the graph as a subset of an boundary as follows. Since the one-sided derivatives
exist at every , one can define for each the corresponding contributors by setting , where for each
A direct computation shows that and for all . Furthermore, the convexity of implies that for each the ball intersects only at the corresponding , which implies that for the set .
By construction, for the irrational , whereas for all rational . Hence is a wedge for each rational while for every irrational , which implies that the points are in fact two-sided shallow singularities (S5). Due to the continuity of , these points form a dense set on . Given that is convex and absolutely continuous as an integral function, and the derivative is bounded, is in fact Lipschitz continuous with some Lipschitz constant . It then follows from the basic properties of Hausdorff measure (see for instance [1, Proposition 2.49]) and the rectifiability of (see [27, Proposition 2.3] and [12, Corollary 3.3]) that and the set of two-sided singularities has full measure on .
Lemma 5.6 (Number of one-sided chain singularities).
For a compact set , the number of one-sided chain singularities (S6) on is at most countably infinite.
Proof.
Write for the set of one-sided chain singularities on . We argue that there exists a collection of pair-wise disjoint open sets , indexed by . The result then follows from the counting argument discussed in the lead-up to Lemma 5.4 above.
For each , the set of outward directions is a singleton . Let and let be a local boundary representation at so that for and
for some continuous functions . It follows from the definition of one-sided chain singularities that the extremal contributors satisfy for all . Since , there are two possibilities:
-
(i)
there exists some non-extremal contributor for which , or else
-
(ii)
there exists some such that for all ,
(see Proposition 3.1 for clarification). In both cases there exists some for which
| (5.6) |
One can then define . Note that for all the set is open and has a positive surface area . Furthermore, and it follows from the construction that if is any other one-sided chain singularity, its distance from satisfies , implying . The sets are thus pair-wise disjoint, open and contained in some bounded ball due to the compactness of . Hence the sum of their surface areas is finite, from which the result follows by the counting argument discussed in the lead-up to Lemma 5.4. ∎
5.1.1. Proof of Theorem 2
We conclude this section with the proof of Theorem 2, which combines Lemmas 5.2–5.4 and 5.6 into one statement.
Theorem 2 (Countable sets of singularities).
For a compact set , the number of wedges (S1), sharp singularities (S2, S3 and S8) and one-sided shallow singularities (S4) and chain singularities (S6) on is at most countably infinite.
Proof.
Consider the collection of the connected components of . Since is assumed to be compact, for some . It follows that all but one (denote this by ) of the connected components are bounded, so that
Following the counting argument presented immediately before the statement of Lemma 5.4, this implies that the index set is at most countably infinite. By definition every sharp singularity (S2, S3, S8) satisfies . It follows then from Lemma 5.3 that the set of sharp singularities on is countable as a countable union of finite sets. Finally, Lemmas 5.2, 5.4 and 5.6 guarantee that the number of wedges (S1) and one-sided shallow (S4) and chain (S6) singularities (respectively) are at most countably infinite, and the proof is complete. ∎
5.2. Chain Singularities Form a Totally Disconnected Set
We conclude the paper by showing that the set of chain singularities (types S6–S8) is closed and totally disconnected. This implies that is nowhere dense, meaning that it is small in the topological sense, even though it may have a positive one-dimensional Hausdorff measure on the boundary.
Before presenting the proof of the above result, we provide a concrete example of a set and for which the one-dimensional Hausdorff measure of the set of chain-chain singularities on is positive. Essentially, we analyse [27, Example 2.2] from the geometric point of view.
Example 5.7 (A set of chain singularities with positive measure).
Let be a 'fat' Cantor set (a Cantor set with positive one-dimensional Hausdorff measure) and consider the set . The Cantor set is obtained by removing from the interval a certain countable collection of open subintervals. By construction is totally disconnected and thus contains no intervals itself, and since it is uncountable, most of the points do not lie on the boundary of any of the removed intervals. Denote the collection of these points by . By construction, every is however an accumulation point of . Since the sets are open, it is clear that for the sets satisfy for all . Thus, for every point there exists a sequence , where for some , and as . We can also assume that whenever . For the connected components of this implies whenever . It is easy to see that condition (ii) in Proposition 4.5 thus holds true for all so that . Hence due to the translation invariance of Hausdorff measure.
5.2.1. Proof of Theorem 3
The proof of our third main result builds on many of the results presented in the previous sections. To show that the set of chain singularities is closed, we combine Proposition 3.9 regarding the connectedness of the complement near wedges and with the characterisation of chain singularities provided by Proposition 4.5. The second part of the proof also makes use of the basic results established in Section 2.2.
Theorem 3 (The set of chain singularities is closed and totally disconnected).
For any compact set and , the set of chain singularities is closed and totally disconnected.
Proof.
We begin by showing that the complement is open. To this end, consider some . If is a wedge (S1) or if , Proposition 3.9 implies that there exists some neighbourhood and a connected subset for which
| (5.7) |
One the other hand, Proposition 4.5 states that each chain singularity is associated with a sequence of disjoint connected components of the complement , for which as . Equation (5.7) hence implies that . Similarly, for a sharp singularity (type S2) or a sharp-sharp singularity (type S3), Proposition 4.2 implies the existence of a neighbourhood for which . Hence is open on the boundary.
To demonstrate that is totally disconnected, we show that for any two chain singularities there exist disjoint open sets for which and . More specifically, we will consider for each and the sets
| (5.8) |
and show that for each there exist and for which and .
Given that is a chain singularity, Proposition 4.2 implies that for the boundary region exhibits 'chain-type' geometry near for at least one extremal outward direction . We begin by assuming that is such a direction, and consider the corresponding sets for . Writing , our aim is to find some for which . To this end, let be a local boundary representation at and let be the continuous functions for which
for every , and all . As argued in the proof of Proposition 4.2 (ii), there exist sequences and for which
-
•
for all ,
-
•
for all , and
-
•
for all and .
It follows that the open set
is a connected component of the complement for all . Consequently there exists some for which whenever . The definition of the sets implies that for each , the boundary point has an outward direction aligned with the vector
(the reader is encouraged to compare this with equation (4.3) in the proof of Proposition 4.2), and the analogous expression (obtained by replacing the roles of and ) holds true for and defined similarly. We claim that there exists some , for which for . Assume this were not the case. Then it follows from the definition of chain-singularities and Proposition 2.12 that for at least one we have for infinitely many . By virtue of the definition of the sets as regions between the graphs , and since for all , it follows from Proposition 2.14 that for . But then, due to Lemma 2.13 (ii)(b), we have
which is impossible. Thus, there exists some for which for , which in turn implies that , since
In the remainder of the proof we consider one by one the cases of one-sided chain (S6), chain-chain (S7) and sharp-chain (S8) singularities, and identify the sets and mentioned in the beginning of the proof.
(i) Assume is a one-sided chain singularity (S6), so that for some . By the argument presented above, there exists some for which . On the other hand, according to the reasoning presented in the proof of Lemma 5.6, the set
satisfies for some (see equation (5.6)). By setting it follows then that and we may define and .
(ii) Assume then that is a chain-chain singularity (S7) with for some . Since now both of the extremal outward directions and are associated with 'chain'-type geometry, one can again utilise the argument above in order to choose for and the corresponding for which and for . By setting we may define and .
(iii) Finally, assume that is a sharp-chain singularity (S8) with for some . We may assume that is associated with 'chain'-type geometry, so that once again we have for some due to the arguments presented above. For the direction , Proposition 4.2 (i) implies that there exists some for which
where is the unique connected component of intersecting , for all and as . It follows then from the definition of chain singularity that . By setting we may thus define and and the proof is complete. ∎
The set of inaccessible singularities (types S6 and S7) inherits the properties of being totally disconnected and nowhere dense, but it may generally fail to be closed. Since the set on the other hand is compact and separable as a subset of , it follows from the Cantor-Bendixson Theorem (see [19, Thm. 6.4]) that whenever the cardinality of the chain-chain singularities (type S7) is uncountable, the set can be written as a disjoint union , where is homeomorphic to the Cantor set and is countable. For further information on totally disconnected spaces, see [19].
Acknowledgements
This project has received funding from the European Union's Horizon 2020 research and innovation Programme under the Marie Skłodowska-Curie grant agreement no. 643073. The authors express their gratitude to Gabriel Fuhrman, Vadim Kulikov, Tuomas Orponen, Sebastian van Strien and Dmitry Turaev for many useful discussions and valuable comments regarding earlier versions of this article.
References
- [1] L. Ambrosio, N. Fusco, and D. Pallara, Functions of Bounded Variation and Free Discontinuity Problems, Oxford University Press, 2000.
- [2] J.-P. Aubin and H. Frankowska, Set-Valued Analysis, Birkhäuser, Boston, 1990.
- [3] F. Bigolin and G. H. Greco, Geometric characterizations of -manifolds in euclidean spaces by tangent cones, J. Math. Anal. Appl. 396 (2012), 145–163.
- [4] A. Blokh, M. Misiurewicz, and L. Oversteegen, Sets of constant distance from a compact set in 2-manifolds with a geodesic metric, Proc. Amer. Math. Soc. 137 (2009), no. 2, 733–743.
- [5] G. Bouligand, Sur les surfaces dépourvues de points hyperlimites, Ann. Soc. Polon. Math. 9 (1930), 32–41.
- [6] by same author, Introduction á la géométrie infinitésimale directe, Gauthier-Villars, 1932.
- [7] M. Brown, Sets of constant distance from a planar set, Michigan Math. J. 19 (1972), 321–323.
- [8] F. H. Clarke, Generalized gradients and applications, Trans. Am. Math. Soc. 205 (1975), 247–262.
- [9] F. Colonius and W. Kliemann, The Dynamics of Control, Birkhäuser, Boston, 2000.
- [10] M. D. Donsker and S. R. S. Varadhan, Asymptotics for the Wiener Sausage, Comm. Pure and Appl. Math. 28 (1975), 525–565.
- [11] P. Erdős, Some remarks on the measurability of certain sets, Bull. Amer. Math. Soc. 51 (1945), no. 10, 728–731.
- [12] K. J. Falconer, The geometry of fractal sets, Cambridge University Press, 1985.
- [13] H. Federer, Curvature measures, Trans. Amer. Math. Soc. 93 (1959), 418–491.
- [14] S. Ferry, When -boundaries are manifolds, Fund. Math. 90 (1976), 199–210.
- [15] J.H.G. Fu, Tubular neighborhoods in Euclidian spaces, Duke Mathematical Journal 52 (1985), no. 4, 1025–1046.
- [16] Y. Hamana, On the expected volume of the Wiener sausage, J. Math. Soc. Japan 62 (2010), no. 1, 1113–1136.
- [17] A. Kac and J. M. Luttinger, Bose-Einstein condensation in the presence of impurities, J. Math. Phys. 14 (1973), 1626–1628.
- [18] A. Käenmäki, J. Lehrbäck, and M. Vuorinen, Dimensions, Whitney covers, and tubular neighborhoods, Indiana Univ. Math. J. 62 (2013), no. 6, 1861–1889.
- [19] A.S. Kechris, Classical descriptive set theory, Graduate Texts in Mathematics, pp. 31–32, 35–36, Springer-Verlag, 1995.
- [20] B. Klartag, Eldan's Stochastic Localization and Tubular Neighborhoods of Complex-Analytic Sets, The Journal of Geometric Analysis 28 (2018), 2008–2018.
- [21] J.S.W. Lamb, M. Rasmussen, and C. Rodrigues, Topological bifurcations of minimal invariant sets for set-valued dynamical systems, Proceedings of the American Mathematical Society 143 (2015), no. 9, 3927–3937.
- [22] S. Nekovar and G. Pruessner, A Field-Theoretic Approach to the Wiener Sausage, Journal of Statistical Physics 163 (2016), 604–641.
- [23] I. Ya. Oleksiv and N. I. Pesin, Finiteness of the Hausdorff measure of level sets of bounded subsets in Euclidian space, Mat. Zametki 37 (1985), 422–431, (in Russian).
- [24] A. Przeworski, An upper bound on density for packings of collars about hyperplanes in , Geom. Dedicata 163 (2013), 193–213.
- [25] J. Rataj, E. Spodarev, and D. Meschenmoser, Approximations of the Wiener Sausage and Its Curvature Measures, The Annals of Applied Probability 19 (2009), no. 5, 1840–1859.
- [26] J. Rataj and E. Spodarev V. Schmidt, On the Expected Surface Area of the Wiener Sausage, Mathematische Nachrichten 282 (2009), no. 4, 591–603.
- [27] J. Rataj and S. Winter, On volume and surface area of parallel sets, Indiana University Mathematics Journal 59 (2010), no. 5, 1661–1685.
- [28] J. Rataj and L. Zajíček, Properties of distance functions on convex surfaces and applications, Czech. Math. J. 61 (2011), 247–269.
- [29] by same author, Smallness of the critical values of distance functions in two-dimensional euclidean and riemannian spaces, Mathematika 66 (2020), 297–324.
- [30] R. T. Rockafellar, Clarke's tangent cones and the boundaries of closed sets in , Nonlinear Analysis: Theory, Methods and Applications 3 (1979), no. 1, 145–154.
- [31] R. T. Rockafellar and R. J.-B. Wets, Variational analysis, Springer-Verlag, 1998.
- [32] F. Spitzer, Electrostatic Capacity, Heat Flow, and Brownian Motion, Z. Wahrscheinlichkeitstheorie 3 (1964), 110–121.
- [33] L.L. Stachó, On the volume function of parallel sets, Acta Sci. Math. 38 (1976), 365–374.