Off-axis Aberrations Improve the Resolution Limits of Incoherent Imaging
††journal: optcon††articletype: Research ArticleThe presence of off-axis tilt and Petzval curvature, two of the lowest-order off-axis Seidel aberrations, is shown to improve the Fisher information of two-point separation estimation in an incoherent imaging system compared to an aberration-free system. Our results show that the practical localization advantages of modal imaging techniques within the field of quantum-inspired superresolution can be achieved with direct imaging measurement schemes alone.
1 Introduction
In well-corrected imaging systems, the propagation from the object to image planes is often modeled with shift invariance [1]. This indicates that the profile of the imaging system’s point spread function (PSF) is independent of object impulse’s location. Recent works have recasted the associated Rayleigh’s criterion, which states that the separation of two nearby point sources cannot be precisely estimated, for such systems in terms of the classical Fisher information (CFI) [2]. The CFI informs on the precision one expects in extracting an unknown parameter with a given measurement scheme. In this context, Rayleigh’s criterion states that the CFI for the separation of two point sources, with direct intensity (DI) measurements, vanishes as the separation between the point sources approaches zero.
A shift in the well-established understanding of the Rayleigh’s criterion was provided by Tsang and Nair [3]. They showed that the quantum Fisher information (QFI), an upperbound for the CFIs over all possible measurement schemes, for the separation of two equally bright incoherent point sources remains non-zero in the sub-Rayleigh regime. This result, along with the introduction of modal imaging techniques like spatial mode demultiplexing (SPADE), a measurement scheme that saturates the QFI, is responsible for the wide net of recent research efforts that sought to extend the promise of this so-called quantum-inspired superresolution [4, 5, 6, 7, 8, 9, 10]. Such extensions include theoretical work in which strides have been made regarding the generalization of the object’s spatial and coherence details [11, 12, 13, 14, 15, 7, 16]. Regarding experimental considerations, the advantages of SPADE-type measurements have been tested and confirmed for a variety of objects [17, 8].
In this work, calculations are provided for the CFI and QFI for the separation between two equally bright incoherent point sources in imaging systems which possess off-axis/field-dependent aberrations. The presence of these aberrations causes imaging systems to be shift-variant; the analysis of such systems have been thus far neglected in the context of quantum-inspired superresolution. Remarkably, we show that the inclusion of simple low-order off-axis Seidel aberrations can give rise to more precise estimation of source separation when compared to an aberration-free system by improving on the CFI and QFI. In particular, we provide the analysis for off-axis tilt (OAT) and Petzval curvature. Both are shown to improve the CFI for both DI and modal imaging measure schemes, with the former providing a global improvement and the latter giving rise to improvements in the sub-Rayleigh regime. To derive these results, a general framework for shift-variant imaging systems is introduced in Section 2, from which a specialized treatment for two equally bright incoherent point sources is considered. Our results, given in Section 3, provide context to the nascent field of quantum-inspired superresolution and show that much improvement can be made through the intentional usage of off-axis aberrations.
2 Theoretical Background
2.1 Shift variant imaging systems
In a shift-invariant imaging system, the optical field at the image plane may be obtained from the optical field at the object plane via a convolution with the system’s PSF, [1]. In the presence of off-axis aberrations, however, the relation between object field, , and image field, , is given by a more general integral transformation. For simplicity, we assume one transverse spatial coordinate for which the aforementioned transformation is given by
| (1) |
where and are the object and image plane spatial coordinates, respectively. The departure from a shift-invariant imaging system is capture by , which indicates that the system PSF may have a dependence on both and that is not confined to their difference . The form for may be obtained by considering the propagation of a quasi-monochromatic point source with wavenumber , modeled as a Dirac delta impulse, located at , through the imaging system. This impulse is mapped onto a linear phase factor at the pupil plane. There, the linear phase factor is modulated by a Gaussian pupil function of characteristic width and a phase aberration function, . The choice of a Gaussian pupil function, commonly made in related works, is used for mathematical convenience [3, 12, 11]. An inverse Fourier transformation is then performed on the pupil-plane field to give
| (2) |
where is a constant with dimensions of optical field that ensures the intensity-normalization of . Furthermore, is the pupil-plane spatial coordinate, and is the focal length of the lenses in a imaging system (although the results presented in this work are valid for arbitrary other imaging configurations); the Fourier optical details regarding Eq. (2) is described further in Supplement 1. A schematic of the imaging system is shown in Fig. 1. It will be useful to define as the characteristic width of the diffraction-limited [] PSF. Notice, as is true for the case of a shift-invariant imaging system, the system PSF would explicitly be a function of the difference in coordinates if were independent of the object location . Such on-axis/field-independent aberrations include well-known Zernike terms such as defocus and spherical aberration. Our work focuses instead on examples of which depend on .

Before proceeding to the analysis of off-axis aberrations, we note that the spatial profile of is affected by the strength of the aberration . For the purposes of quantifying this strength in later sections, it is useful to use and as standard lengths for the pupil coordinate and the object location , respectively. The reason for this choice is due to (1) the Gaussian pupil function strongly attenuating any signal at the pupil plane located at and (2) the context of quantum-inspired resolution is most relevant for objects located at ; that is, for objects whose features are below twice the diffraction-limited PSF. This regime is henceforth referred to as the sub-Rayleigh regime.
2.2 Off-axis aberrations
From Eq. (1), it is clear that the PSF of a shift variant system is determined by the aberration function . Although there is an infinitude of options; we restrict our analysis to the case where
| (3) |
which is recognized as the superposition of the two low-order off-axis Seidel aberrations commonly called OAT and Petzval curvature [18]. Notice that Eq. (3) is written in terms of ratios for and so that and can be interpreted as the maximal [when and , as discussed in the paragraph following Eq. (2)] optical path difference caused by OAT and Petzval curvature, respectively. By further defining and as
| (4) |
to be OAT and Petzval curvature strength parameters, respectively (they measure rates, for , at which the phase difference caused by OAT and Petzval curvature, respectively, increases as a function of ), one finds that the intensity-normalized shift-variant PSF is given through Eq. (2) by
| (5) |
where
| (6) |
is the characteristic width of and
| (7) |
is the phase of . Equation (5) shows why the choice of Eq. (3) was used: OAT and Petzval curvature cause intuitive changes in the PSF’s mean location and width, respectively. Therefore, much insight can be obtained from studying Eq. (3) since, while other off-axis aberrations may induce higher order effects on , the effects of OAT and Petzval is expected to provide a useful leading-order description.
OAT and Petzval curvature, among other Seidel aberrations, are common in typical imaging systems and have well-known interpretations particularly in the language of geometrical (ray) optics. For a system with OAT, the plane wave emerging from the pupil associated with each object location is proportionally tilted (posses an additional linear phase). This often arises from unintentional tilts of the optics within the system and causes an incorrect magnification in the image. This magnification factor, according to Eq. (5) and Fig. 1, is ; in the case of an object scene with two point sources, this magnification translates to an amplification of the separation in the image field. Petzval curvature, on the other hand, describes an imaging system in which the image is perfect when the intensity is measured along a curved surface. If the intensity is instead measured, as it usually is, along a flat surface, off-axis object points are mapped to a shift-variant PSF whose width increases with . This width, according to Eqs. (5) and (6), this width is .
For the aberration-free case ( and ), Eq. (5) reduces to the shift-invariant Gaussian PSF with width . Furthermore, it should be noted that the proceeding comparisons of Fisher information (FI) values between systems where the PSF is given by and the aberration-free case is fair, since . In other words, the presence of OAT and Petzval curvature does not reduce the diffraction-limited spot size and therefore the improved FI is not attributed to the reduction of .
2.3 Measurement schemes
Although this work will primarily be concerned with incoherent imaging, a general framework is provided here for completeness and comprehension. To this end: the density matrix, which represents the cross-spectral density of the optical field at the image plane, for the case of two partially coherent point sources with intensity ratio , a known centroid taken to be at the origin of the coordinate system, separated by a distance is given by
| (8) |
which is expressed over the non-orthogonal, intensity-normalized basis . These basis kets are defined over position-space through Eq. (1) as
| (9) |
Furthermore,
| (10) |
is the field-overlap integral between the two imaged PSFs and is a complex-valued coherence parameter whose values are restricted by the condition . The normalization factor in Eq. (8) indicates that the density matrix uses the image-plane normalization scheme, in which the unit-trace condition on is ensured by the total number of received photons at the image plane. This choice is in contrast to the object-plane normalization scheme; a detailed discussion of the two options is provided elsewhere.
The act of performing a measurement on the received photons is captured mathematically through computing the modulus-square coefficients over a corresponding set of projections of . These coefficients are taken to be the probabilities of finding an image-plane photon in a certain mode (which may be continuous or discrete). In this work, we focus on comparing the measurement schemes of DI and SPADE. For DI, the set of projection modes is the continuous position basis ; the probability density of finding a photon in the position of the image plane (conditioned on a detection event) is given by
| (11) |
In Section 3, we focus on the case where and (equally bright incoherent point sources). Figure 2 is provided for the visualization of , which is a normalized version of the image-plane intensity distribution, for various levels of OAT and Petzval curvature. The aberration-free case shown in Fig. 2(a) shows the usual intensity pattern of two Gaussian PSFs converging as the separation vanishes. The effects of non-zero values of and are illustrated in Figs. 2(b) - (d): OAT causes the intensity distributions from the two point sources to converge at a different rate due to the magnification factor and Petzval curvature gives the intensity distributions a -dependent width. Regarding OAT, it is clear from the comparison of Fig. 2(a) and (b) that non-zero values of allows for the two point sources’ PSFs to be more easily distinguished for smaller values of . This effect, which will be detailed later, is responsible for larger values of CFI when using DI for imaging systems with OAT. Petzval curvature, on the other hand, does not have a similarly clear benefit in -estimation whe compared to OAT. The resolution advantages offered by non-zero values of instead comes from the sensitivity of the width as approaches zero.

For SPADE, the projection is done over any set of discrete orthonormal modes. A natural choice is the -matched Hermite-Gauss (HG) basis , where the -th mode is defined as
| (12) |
and is the -th physicist’s Hermite polynomial. The probability of finding a photon (conditioned on a detection event) in the -th mode is therefore the projection
| (13) |
The probability densities given by Eqs. (11) and (13) for DI and SPADE, respectively, are needed in the calculation of the CFI of either measurement scheme. For the case where only the separation is an unknown parameter, the corresponding CFIs for DI and SPADE are given by
| (14) |
and
| (15) |
respectively. Although a full background on SPADE has been presented thus far, it is sufficient to consider a simplified version of SPADE known as binary SPADE (BSPADE) when one is interested in the sub-Rayleigh regime. In BSPADE, a photon arriving from the object plane is measured either in the mode or in the combined mode. Intuition for this simplification comes from the fact that, as the object shrinks, most of the photons arriving at the image plane will project into the lowest order modes and the higher order modes contains progressively less information. In this case, the summation in Eq. (15) simplifies and can can be explicitly expressed as
| (16) |
The quantities and are valuable in that, via estimation theory, their reciprocals provide lower bounds for the variance in the estimation of when the corresponding measurement scheme is used. In other words, if and are estimators for constructed from data acquired via DI or BSPADE measurements, respectively, then
| (17) |
The CFI for DI and BSPADE measurements are compared for various values of and in Section 3. There, it is shown that non-zero values of these aberration strength parameters can lead to larger values of and .
2.4 Quantum FI
In addition to the CFI, which depends on the choice of measurement scheme, it is informative to consider the QFI, , which provides an upperbound to all possible CFI once the transformation between object and image planes is stipulated. In other words,
| (18) |
As is standard in deriving the QFI, one first finds the symmetric logarithm derivative (SLD), , associated with the separation parameter . The SLD is defined implicitly through
| (19) |
where is the image-plane density matrix given by Eq. (8); one should note that this prescription of corresponds to the image-plane normalization scheme detailed in []. With in hand, the QFI for is immediately obtained via
| (20) |
Details pertaining to the derivation of the QFI for imaging systems with off-axis aberrations are found in Supplement 1. It should be emphasized that such calculations for the separation QFI for imaging systems in which the PSF is shift-variant require care and themselves constitute a novel result from which interesting discussions may arise. However, to keep the focus on well-known measurement schemes like DI and BSPADE, the QFI will primarily serve as a confirmation of CFI results through Eq. (18).
3 Results and Discussion
3.1 Results
Although the framework developed in Section 2 is general, we now specialize to the case of two equally bright incoherent point sources. This choice corresponds to the selection of and in Eqs. (8), (11), and (13). We are interested in calculating the CFI for DI and BSPADE for various values of and and comparing them to the case where the imaging system is aberration-free (and therefore shift-invariant), i.e., for and .
In the following, the CFI for DI, given by Eq. (14), is calculated numerically. For BSPADE, it can be shown using Eqs. (5), (12), and (13) that
| (21) |
which may be inserted into Eq. (16) to obtain . Comparisons of and for various values of and are displayed in Fig. 3. When considering the case (the imaging system only has OAT and no Petzval curvature), Fig. 3(a) shows that increasing values of leads to greater for all values of : this global improvement in for non-zero values of is one of the main results of this analysis. For BSPADE, Fig. 3(b) shows that a similar improvement in occurs when in the sub-Rayleigh regime. Additionally, notice that saturates the QFI at exactly for all values of , which indicates that BSPADE continues to be an optimal measurement for even for shift-variant imagine systems. However, we re-emphasize that the main purpose of this analysis to to show that introducing off-axis aberrations in a system can vastly improve CFI even if one only considers a DI measurement scheme. The introduction of OAT with strength leads to very high information (in comparison with the QFI value of in the aberration-free case) well into the sub-Rayleigh regime (). That is, even though at exactly always, one in principle can obtain any for non-zero by increasing the strength of OAT even if is small.

Figures 3(c) and (d) consider the case where the imaging system contains Petzval curvature, but no OAT. It can be seen, in a behavior similar to that seen in Figs. 3(a) and (b) that larger values of lead to larger values of and in the sub-Rayleigh regime, with the latter saturating the QFI near . Therefore, like OAT, Petzval curvature can improve the performance of an imaging system regarding two-point separation estimation. However, there are some notable differences between the behaviors of the CFI when the system contains OAT and when it contains Petzval curvature. First, increasing does not affect the value of the at exactly ( regardless of and ). In other words, all the curves seen in Fig. 3(d) coincide in the limit of vanishing separation. Second, there is an interval of within the sub-Rayleigh regime in which DI outperforms BSPADE. For example, comparing the case for and in Figs. 3(c) and (d), repsectively, it can be seen that the former reaches a peak of roughly compared to the latter’s . Finally, we note that Petzval curvature may lead to the formation of local minima in and , which indicate that the corresponding measurement schemes perform optimally neither at exactly nor at , but rather at some intermediate value that, according to Figs. 3(c) and (d), occur in the sub-Rayleigh regime.
For completeness, CFI and QFI curves for the case where both OAT and Petzval curvature are present are shown in Fig. 4 for a fixed value of and varying values of . As was observed from Fig. 3, larger values of raise the maximal attainable information while various values of lead to CFI curves that peak locally in the sub-Rayleigh regime [although such peaks for the BSPADE CFIs in Fig. 4(b) are not apparent for smaller values of since the nonzero value of raises the CFIs at ].
It is prudent to point out the behavior of the QFI curves in Figs. 3 and 4 as well. When only OAT is present, the QFI remains constant over , with its value given by
| (22) |
which indicates that grows quadratically as a function of . On the other hand, when Petzval curvature is present, the QFI increases from the value given by Eq. (22) at to larger values as increases. This peculiar behavior, which is had not been seen for incoherent quantum-inspired superresolution studies of shift-invariant systems, is a result of the presence of the second term in the phase, , of the PSF given by Eq. (7). This quadratic (in ) phase contribution is due to the presence of Petzval curvature in , as stipulated in Eq. (3); Supplement 1 provides more insight regarding the QFI’s behavior.

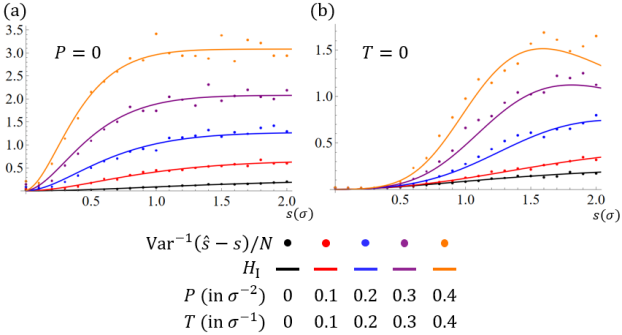
Maximum likelihood estimation (MLE) simulations for the separation were performed for DI to support the findings from Eq. (14) and Fig. 3(a) and (c). For the -th (out of ) iteration of the simulation, the number of photons arriving at the image plane, , was chosen using Poisson statistics around an average photon number of . That is, the probability mass function for is given by
| (23) |
Once is chosen, an equivalent number of photon positions in the image plane is chosen using Eq. (11) as the probability density function for independent events. Given these photon locations, the unbiased MLE estimator, denoted as , is used to find an estimate for the separation . The variance of , whose average value is , is then calculated over the ensemble of iterations. In order to compare the simulation results to , one must divide the reciprocal of the aforementioned variance by to compute the per-photon CFI. This process is repeated for different values of and and the results of these simulations are shown in Fig. 5 over the sub-Rayleigh regime for photons and iterations. As is done in Figs. 3(a) and (c), the cases of and were analyzed, respectively. It is evident that there is good agreement between the simulation results and .
3.2 Discussion
The primary result of this work is that it is possible to improve upon the two-point resolution of an aberration-free imaging system by intentionally introducing known off-axis aberrations. Particularly, this is true even for DI measurement schemes as seen in Figs. 3 and 4. In fact, whether the improvement is global (over all , as it is when OAT is present) or only over the sub-Rayleigh regime (when only Petzval curvature is present), the improvement can exceed the improvements offer by modal imaging techniques like BSPADE for aberration-free systems. In other words, if a sufficient amount of off-axis aberration can be provided, DI imaging schemes can lead to large even in the sub-Rayleigh regime. Since practical applications of two-point imaging deal with non-zero values of , increasing can effectively allow DI measurement schemes to attain the same information allowed by BSPADE in shift-invariant systems. However, this is not to say that BSPADE (and other modal imaging schemes) are fruitless; it is clear from Figs. 3 and 4 that BSPADE benefits in a similar fashion to DI when off-axis aberrations are introduced. Importantly, at least for OAT and Petzval curvature, BSPADE still (as it did for the aberration-free case) yield a that saturates the QFI in the sub-Rayleigh regime.
The findings in this work are somewhat counter-intuitive as many traditional imaging systems start with substantial aberrations and a significant amount of effort is often needed to minimize such errors towards the goal of an aberration-free (diffraction-limited) system. However, at least in the context of resolving two incoherent and equally bright point sources where the separation is the only unknown parameter, it turns out that the presence of off-axis aberrations can actually improve performance. It may be of interest then, given the number of well-corrected imaging systems in existence, to understand how one may intentionally introduce OAT and Petzval curvature back into these imaging systems in order to take advantage of the larger DI or BSPADE CFI. Of course, it is possible to purposely (re)introduce aberrations by misaligning or adding/subtracting optical elements in the system. However, we should mention that despite their simple geometrical optics interpretations, OAT and Petzval curvature cannot be properly introduced by simply tilting or curving the image plane, respectively. Although these geometrical manipulations of the image surface create effective PSFs that are SV, they do not have the necessary dependence on , the object plane coordinate, in order to bring about the results from a genuine given by Eq. (3).
4 Concluding Remarks
The analysis presented in this work inform on the CFI (for DI and BSPADE) and QFI regarding the separation estimation between two equally bright incoherent point sources when the imaging system includes off-axis aberrations. The resulting shift-variant nature of the system’s field PSF gives rise to CFI and QFI that are novel and, importantly, greater than their counterparts in the aberration-free case. Specifically, OAT and Petzval curvature, which constitute two of the lowest order off-axis Seidel aberrations, were shown to provide improvements to the CFI for both DI and BSPADE measurement schemes. A summary of their effects is provided as follows:
-
•
OAT [ is linear in both object () and pupil () locations] induces a magnification on the image field. In other words, two object points with separation are mapped to two PSFs with (larger) separation . This magnified separation provides the intuition for globally a larger CFI and QFI compared to the aberration-free case.
-
•
Petzval curvature [ is quadratic in both object () and pupil () locations] induces an image field where the width of the PSF varies with object location. As two object points with separation approach each other , the width of the two PSFs approaches the aberration-free case (). This object-dependent width increases the sensitivity of the image field, which in turn leads to a larger CFI and QFI despite the fact that for nonzero separation .
QFI results were also developed and compared with the CFI. Once again, the details of the QFI derivation are shown in Supplement 1.
To more fully appreciate the results of this work, it is valuable to contextualize them with the majority of the research done so far regarding quantum-inspired superresolution. The primary message in recent history is that novel modal imaging schemes, like BSPADE, can provide an advantage in resolution compared to traditional DI measurements. Such claims have been extended, and supported through theory and experiments, to more complicated object distributions (discrete or continuous). Furthermore, additional works have sought to optimize modal imaging. Examples include the development of practical adaptive imaging schemes that leverage advantages in both DI and BSPADE as well as a theoretical analysis on the effect of photon statistics [19, 9]. However, our present work demonstrates that the presence of off-axis aberrations, whose study have been largely ignored in the context of quantum-inspired superresolution, provides an improvement to both CFI and QFI that is relatively intuitive and whose mathematical treatment is straightforward.
The findings here are reminiscent of computational imaging techniques in which an imaging system is intentionally altered from the traditional aberration-free DI scheme in order to benefit from the known adjustments. We show that the introduction of OAT and Petzval curvature into imaging systems can improve the CFI in two-point separation estimation and therefore provide a link between the recent field of quantum-inspired superresolution with aspects of computational imaging. However, although the derivation presented here and in Supplement 1 for the CFI and QFI encompasses more than the case where the object scene consists of two equally bright incoherent point sources, realistic objects are much more complicated and require more care in their treatment. In addition to this concern, which is relevant in all of quantum-inspired superresolution analyses, realistic imaging systems have constraints regarding the strength of off-axis aberrations like OAT and Petzval curvature due to manufacturing and tolerancing limitations. Further studies are required to determine the benefits of introducing off-axis imaging systems to resolve general, realistic object scenes.
Acknowledgements. The author thanks S. A. Wadood, A. N. Vamivakas, and M. A. Alonso for useful discussions.
Disclosures. The author declares no conflicts of interest.
See Supplement 1 for supporting content.
References
- [1] J. W. Goodman, Fourier Optics (Roberts and Company, 2005).
- [2] C. W. Helstrom, Quantum detection and estimation theory (Academic Press, 1976).
- [3] M. Tsang, R. Nair, and X.-M. Lu, “Quantum theory of superresolution for two incoherent optical point sources,” \JournalTitlePhys. Rev. X 6, 031033 (2016).
- [4] M. Tsang, “Subdiffraction incoherent optical imaging via spatial-mode demultiplexing: Semiclassical treatment,” \JournalTitlePhys. Rev. A 97, 023830 (2018).
- [5] M. Tsang, “Quantum limit to subdiffraction incoherent optical imaging,” \JournalTitlePhys. Rev. A 99, 012305 (2019).
- [6] M. Tsang and R. Nair, “Resurgence of rayleigh’s curse in the presence of partial coherence: comment,” \JournalTitleOptica 6, 400–401 (2019).
- [7] S. Kurdzialek, “Back to sources – the role of losses and coherence in super-resolution imaging revisited,” \JournalTitleQuantum 6, 697 (2022).
- [8] V. Ansari, B. Brecht, J. Gil-Lopez, J. M. Donohue, J. Řeháček, Z. c. v. Hradil, L. L. Sánchez-Soto, and C. Silberhorn, “Achieving the ultimate quantum timing resolution,” \JournalTitlePRX Quantum 2, 010301 (2021).
- [9] Sánchez-Soto, Luis L., Hradil, Zdenek, Rehácek, Jaroslav, Brecht, Benjamin, and Silberhorn, Christine, “Achieving the ultimate optical resolution,” \JournalTitleEPJ Web Conf. 266, 10017 (2022).
- [10] S. Zhou and L. Jiang, “Modern description of rayleigh’s criterion,” \JournalTitlePhys. Rev. A 99, 013808 (2019).
- [11] W. Larson and B. E. A. Saleh, “Resurgence of rayleigh’s curse in the presence of partial coherence,” \JournalTitleOptica 5, 1382–1389 (2018).
- [12] K. Liang, S. A. Wadood, and A. N. Vamivakas, “Coherence effects on estimating two-point separation,” \JournalTitleOptica 8, 243–248 (2021).
- [13] K. Liang, S. A. Wadood, and A. N. Vamivakas, “Coherence effects on estimating general sub-rayleigh object distribution moments,” \JournalTitlePhys. Rev. A 104, 022220 (2021).
- [14] K. Liang, S. A. Wadood, and A. N. Vamivakas, “Quantum fisher information for estimating N partially coherent point sources,” \JournalTitleOpt. Express (2022, Under Review).
- [15] E. Bisketzi, D. Branford, and A. Datta, “Quantum limits of localisation microscopy,” \JournalTitleNew Journal of Physics 21, 123032 (2019).
- [16] Z. Hradil, J. Řeháček, L. Sánchez-Soto, and B.-G. Englert, “Quantum fisher information with coherence,” \JournalTitleOptica 6, 1437–1440 (2019).
- [17] S. A. Wadood, K. Liang, Y. Zhou, J. Yang, M. A. Alonso, X.-F. Qian, T. Malhotra, S. M. H. Rafsanjani, A. N. Jordan, R. W. Boyd, and A. N. Vamivakas, “Experimental demonstration of superresolution of partially coherent light sources using parity sorting,” \JournalTitleOpt. Express 29, 22034–22043 (2021).
- [18] J. C. Wyant and K. Creath, “Basic Wavefront Aberration Theory for Optical Metrology,” in Applied Optics and Optical Engineering, Volume XI, vol. 11 R. R. Shannon and J. C. Wyant, eds. (1992), p. 2.
- [19] M. R. Grace, Z. Dutton, A. Ashok, and S. Guha, “Approaching quantum-limited imaging resolution without prior knowledge of the object location,” \JournalTitleJ. Opt. Soc. Am. A 37, 1288–1299 (2020).