Numerical conservative solutions of the Hunter–Saxton equation
Abstract.
In the article a convergent numerical method for conservative solutions of the Hunter–Saxton equation is derived. The method is based on piecewise linear projections, followed by evolution along characteristics where the time step is chosen in order to prevent wave breaking. Convergence is obtained when the time step is proportional to the square root of the spatial step size, which is a milder restriction than the common CFL condition for conservation laws.
Key words and phrases:
Hunter–Saxton equation, conservative solution, numerical method2010 Mathematics Subject Classification:
Primary: 35Q53, 65M25, 65M12; Secondary: 65M061. Introduction
The Hunter–Saxton (HS) equation is given by
| (1.1) |
It was derived, in differentiated form, from the nonlinear variational wave equation as an asymptotic model of the director field of a nematic liquid crystal [13]. Furthermore, the Hunter–Saxton equation is the high frequency limit of the Camassa–Holm equation [6]. It is completely integrable [14] and can be interpreted as a geodesic flow [17].
Another main property is that weak solutions are not unique, see e.g. [15, 16]. The main reason being the following: Solutions of (1.1) may experience wave breaking in finite time, i.e., pointwise while the energy remains uniformly bounded and the solution stays continuous. Furthermore, a finite amount of energy is concentrated on a set of measure zero.
We illustrate wave breaking with an example by considering a peakon solution — a soliton-like solution that is continuous and piecewise linear in space. It is not a classical solution. Indeed the function is not differentiable at the break points between the linear segments.
Example 1.1 (Wave breaking for peakons).
A particular peakon solution that illustrates wave breaking is given by
with . Note that for ,
that is is a conserved quantity. As , we see that while the interval shrinks to a single point (see Figure 1). One can check that the function remains uniformly bounded and uniformly Hölder continuous with exponent on .


It is possible to extend weak solutions past wave breaking in various ways, see [1, 2, 3, 9, 19]. One could ignore the part of the solution that blows up. That amounts to continuing the solution in Example 1.1 as for all . Such solutions are called (energy) dissipative and are unique [5, 7]. A different approach is to “reinsert” the energy after wave breaking to get (energy) conservative solutions. To extend the solution in Example 1.1 as a conservative solution we let the formula defining hold for as well. Uniqueness of conservative solutions is only known in several special cases [25, 26]. The different solution concepts mimic the ones for some closely related equations: the Camassa–Holm equation [4], the nonlinear variational wave equation [21], and various generalizations of these equations.
From now on we focus on weak solutions that preserve the energy, that is conservative solutions. It has been shown in [2] that there exists a Lipschitz continuous semigroup of weak conservative solutions to (1.1). Existence of solutions is proved using Lagrangian coordinates and characteristics. Note that the curves describing the position of the break points in Example 1.1 are examples of characteristic curves.
To prolong the solution past wave breaking and to attempt to overcome the non-uniqueness of weak solutions past wave breaking, we include the cumulative energy as part of the solution. The HS equation is then reformulated as
| (1.2a) | ||||
| (1.2b) | ||||
with appropriate initial conditions and the conditions
| (1.3a) | ||||
| (1.3b) | ||||
| (1.3c) | ||||
where is the absolutely continuous part of . A closer look at the imposed conditions reveals that one challenge is to find a numerical method that respects condition (1.3c). The key to overcome this difficulty is to consider (1.2) with the slightly more general conditions (1.3a), (1.3b), and
| (1.4) |
This new system is a reformulation of the so-called two-component Hunter–Saxton (2HS) system, which not only generalizes the HS equation, but can also be studied using the same methods and ideas, see [9] and [19]. Moreover, every conservative solution to the HS equation can be approximated by smooth solutions of the 2HS system. Of particular interest for us is the fact that if and are piecewise linear and continuous on some interval and
then this property will be preserved along characteristics and no wave breaking takes place. Furthermore note that applying a piecewise linear projection operator to pairs satisfying (1.3c) yields pairs satisfying (1.4). Thus using the method of characteristics and piecewise linear projection operators as building blocks for a numerical method seems to be a good choice.
1.1. Numerical methods for the Hunter–Saxton equation
Despite receiving a considerable amount of attention theoretically, relatively little numerical work has been done on the Hunter–Saxton equation. In [11] a finite difference method was constructed and proved to converge to dissipative solutions. In [22] and [23] discontinuous Galerkin methods were introduced, followed by a convergence proof in the dissipative case but not in the conservative case. More recently, a geometric numerical integrator, based on the complete integrability of (1.1), was introduced and studied in [18]. The method seems to converge to the conservative solutions, but no proof was presented. In [20] a difference method that converges for smooth solutions of a modified Hunter–Saxton equation in the periodic setting was introduced. The analysis in [20] does not apply to our setting since the method relies crucially on the modification of the equation, and even for (1.1) the periodic case and the real line case are essentially different [24].
In this paper, we contribute to this line of research by introducing a convergent numerical method for the conservative solutions of the Hunter–Saxton equation (1.2). The method, introduced at the beginning of Section 2, is inspired by Godunov-type methods for conservation laws and is based on piecewise linear projections, followed by evolution along characteristics forward in time. As for finite difference (and volume) schemes for conservation laws, where one limits the time step to prevent shocks from occurring, we limit the size of to prevent wave breaking (see (2.3)). In contrast to the situation for conservation laws, we get the improved bound for some that depends on the initial data.
After establishing some a priori bounds of the numerical solutions in Section 2.1, we show in Section 2.2 that the numerical approximation converges with a rate of to the unique solution of (1.2) whenever the solution is Lipschitz continuous. We also prove the existence of a convergent subsequence of the proposed numerical method in the general case, which converges to a weak solution preserving . Unfortunately, the present lack of a satisfactory uniqueness theory for conservative solutions of (1.1) prevents us from guaranteeing that the sequence as a whole converges to the unique conservative solution. However, we perform numerical experiments towards the end of the paper, see Section 3, showing that the numerical approximations seem to converge towards the desired solutions also in the case of non-Lipschitz solutions.
2. Numerical conservative solutions of the Hunter–Saxton equation
For the (to be defined) numerical solutions to approximate conservative solutions of the HS equation, we will require that they mimic certain aspects of these solutions. In particular, we will design a method such that the numerical approximations are pairs in a suitable function space , which resembles the one used for the 2HS system in [19]:
Definition 2.1.
Let the space consist of pairs such that
Remark 2.2.
Given a pair , there exists a positive finite Radon measure , such that .
Let be the conservative solution operator associated to (1.2), as defined in [19], mapping every initial data to the corresponding solution at time . For continuous and piecewise linear initial data , the conservative solution of (1.2) takes a particularly simple form as long as no wave breaking takes place: The solution is again continuous and piecewise linear and the breakpoints travel along characteristics, i.e. along the curves given by
| (2.1) |
we get
| (2.2a) | ||||
| (2.2b) | ||||
with linear interpolation between the breakpoints. Thus the equations (2.2) implicitly define the solution operator in the case of continuous and piecewise linear initial data .
Turning our attention once more towards Example 1.1, we see that the two curves
describe the position of the breakpoints. Furthermore, at the breaking time we have . In the general case of a continuous and piecewise linear initial data , wave breaking occurs at times where at least two break points coincide, i.e., for some .
Using the above observations, we will now derive the numerical scheme. The idea is to use piecewise linear projection operators to project the solution at each time step, and to evolve the solution one time step ahead. To improve the readability, we define points in space and time
Definition 2.3.
Define the projection operator so that is given by
with linear interpolation in between grid points .
Remark 2.4.
The operator is well defined since it is assumed that is (left) continuous, and thus one can evaluate at any point.
Assume now that the time step is so small that no wave breaking occurs as the piecewise linear approximation is evolved from one time step to the next. Then the scheme is defined by and
We will need to interpret the numerical solution as a function from to .
Definition 2.5.
We define the numerical solution at a point by
That is, we follow the solution along lines from one time step to the next, and interpolate linearly in between.
After each evolution forward in time, the solution is projected onto the space of continuous piecewise linear functions. As multiple peakons can be glued together to form multipeakons, which solve (1.2), we can continue computing the solution forward in time after each projection.
Remark 2.6.
Note that as the numerical approximation consists of linear interpolations between grid points and solving exactly between time steps, satisfies .
We introduce a CFL-like condition that ensures that characteristic curves do not collide as long as we evolve the equations less than . In particular, the condition prevents wave breaking, which occurs when for some and . We arrive at the following bound on in terms of the initial data and the grid length . The condition is not a true CFL condition in the sense that characteristics may travel past several cells during one time step.
Definition 2.7 (CFL-like condition).
We require that satisfies
| (2.3) |
Note that (2.3) is less restrictive than the CFL conditions used for conservation laws, which reads for some depending on the initial data and the particular flux function.
Remark 2.8.
Remark 2.9.
Similarly to the forward characteristics governed by (2.1), there are characteristics backwards in time. In particular, we can associate to any grid point with , the unique point given by
| (2.5) |
and
Remark 2.10.
The numerical scheme can be written in the more familiar form
where the backward characteristic from at satisfies , see (2.5).
2.1. A priori bounds of the numerical solutions
In this section, we prove certain a priori bounds of the proposed method, which are needed to prove convergence. We begin with some preliminary results on the projection operator .
Proposition 2.11.
For in , let . Then we have the following estimates
Proof.
For any grid point we have and by the definition of . Hence, using the properties in Definition 2.1, for any it holds that
which proves the first inequality. Next, we have
and thus . The -estimate for is proved as follows,
From the -estimate one can obtain the -estimate,
∎
To prove that the numerical approximation converges, we wish to employ the Arzelà–Ascoli theorem to ensure convergence of a subsequence of , and subsequently a version of the Kolmogorov compactness theorem to get convergence of a subsequence of . To invoke the Arzelà–Ascoli theorem, we need to be uniformly equicontinuous and equibounded. For the Kolmogorov compactness theorem we need that is of uniformly bounded total variation, that is continuous in in the -norm, and that does not escape to infinity as tends to zero. First we establish some immediate properties of the solutions .
Lemma 2.12.
The numerical solution satisfies
| (2.7a) | ||||
| (2.7b) | ||||
| (2.7c) | ||||
Moreover, is continuous and monotonically increasing. If , then for some smooth curves . Finally, if we have the estimate .
Proof.
The bounds on and follow from (2.2) and Definition 2.5. Since both (2.2) and the projection operator preserve the monotonicity of , we have that is monotone increasing. Continuity follows from the fact that characteristics emanating from different grid points are at least apart as long as the time step is controlled by (2.4).
We show for all . To begin with let . Since and are both piecewise linear and continuous it suffices to show the result for . By assumption one has that and direct calculations yield
Now, let , and denote by the conservative solution with initial data . Furthermore, assume that satisfies (2.7c). Then we have for each spatial grid point that and . Moreover
since this property is preserved along characteristics. Applying the projection operator, we can follow the same lines as in the case , to obtain that (2.7c) holds for all .
By assumption . Let be the closest gridpoint to from below, and let be the closest gridpoint to from above. Then is supported in . Furthermore, , , , and .
Next we show that also is compactly supported. By (2.1), we have and . Thus is supported in the interval . Iteratively, we get that is supported in
Here it is essential that
Since , we have that . From the interpolation between temporal grid points we get
The total variation estimate follows from the fact that it holds for conservative solutions, and that the projection operator can only reduce the total variation. ∎
Remark 2.13 (Spatial Hölder continuity).
An immediately derivable property of the numerical solution from (2.7c) is spatial Hölder continuity of :
In order to obtain temporal Hölder continuity for we will need to compare a numerical solution with itself several time steps ahead.
Lemma 2.14.
For each there are non-negative constants such that
| (2.8a) | ||||
| (2.8b) | ||||
| (2.8c) | ||||
where
Proof.
We prove the lemma by induction on . First note that the statement is trivially true for . Then assume that it holds for . We show that it must then hold for as well. We have that
where is a backwards characteristic, cf. (2.5). Hence, if we define we have that for some such that and . Furthermore, we have
Let
Since is greater than the in the inductive assumption, we get
with
The computation for is analogous. Indeed, we have
∎
Next is an important corollary which provides a discrete Hölder continuity estimate for the numerical solution .
Corollary 2.15 (Discrete temporal Hölder continuity).
The numerical solution satisfies
with
We are now ready to prove that for each the solutions are uniformly Hölder continuous on . Uniform Hölder continuity implies equicontinuity, which is necessary for the Arzelà–Ascoli theorem.
Lemma 2.16 (Hölder continuity).
Let and , then
where
Proof.
Assume first that and . We start by adding and subtracting and obtain
Then, we have by definition,
Note that at the spatial grid points the solution equals the conservative solution given by (2.2) with initial data evolved forward in time. For conservative solutions given by (2.2) we do have Hölder continuity with the constant depending on , , and only. To be more specific it has been shown in the proof of [9, Theorem 3.14] that
for all . Hence, we have
for .
To use the Kolmogorov compactness theorem we need uniform regularity of in .
Lemma 2.17.
Let , then
where and .
Proof.
To begin with let . Assume first that there exists such that . Then
Otherwise, we have that there exist and , possibly equal, such that . Then
The number of terms in the above sum is bounded from above by . Direct calculations yield
and therefore
Due to condition (2.4) characteristics (forward as well as backward) from neighbouring grid points have a minimum distance of . Hence for each , the maximal number of backward characteristics ending up in equals two. Hence we have the bound
The general case can now be found by iteration over time steps and using condition (2.4),
∎
2.2. Convergence of the numerical solutions
In this section we prove that there exists a convergent subsequence of , and that the limit is a conservative weak solution of (1.2), which satisfies condition (1.4). First we rigorously define, as in [2, 9, 19], conservative weak solutions.
Definition 2.18.
We prove the existence of a convergent subsequence of .
Theorem 2.19.
To any initial data such that has compact support, there exists a convergent subsequence of . The convergence is in , pointwise a.e. in for , and uniform on for . Moreover, the limit satisfies
Here the relation between the positive Radon measure and is given by .
Proof.
We have from Lemma 2.12 that the family is uniformly bounded on and that has compact support for all . Furthermore, by Lemma 2.16 is uniformly equicontinuous. Hence the conditions for the Arzelà–Ascoli theorem are satisfied and there exists a convergent subsequence of such that converges to some for each . The limit of is bounded and Hölder continuous with the same constants as the individual .
Next we show that the limit satisfies for all . By construction we have that for all . Thus there exists a subsequence of , so that converges weakly to in . Thus for any we have
and . Thus we have in . A closer look reveals that the above argument shows that every weakly convergent subsequence has the same limit and therefore in for all .
Combining Lemma 2.12 and [10, Theorem 12], we obtain, that for each , there exists a subsequence of such that converges pointwise everywhere and in the -norm to a function of bounded variation. Following the lines of the proof of [12, Theorem A.11] and taking into account Lemma 2.17, it then follows that there exists a subsequence of , for which the converge in . Furthermore, denoting the limit by , we even have pointwise almost everywhere convergence of a further subsequence to .
Last but not least, we have a look at the connection between and . Denote by the very last subsequence of , then we have that
Since, we can find two sequences and such that and , we end up with
∎
We still need to prove that the limit of the convergent subsequence is a conservative weak solution in the sense of Definition 2.18.
Theorem 2.20.
Proof.
It remains to show that the integrals (2.9) and (2.10) hold. We compute the integrals for as follows
Here denotes the conservative solution given by (2.1) and (2.2) with initial data . Since the conservative solution is a weak solution we get
Recalling that yields
where we applied Proposition 2.11 in the last step as follows
Here . Note that is finite since has compact support.
We now turn our attention to the first sum. Recall that , , and keep Proposition 2.11 and Lemma 2.12 in mind. Direct calculations then yield
Since has compact support we end up with
In particular, we have
By letting , we end up with (2.9) as the subsequence of , constructed in Theorem 2.19, converges to uniformly in for and in for .
In a similar fashion we demonstrate that the second integral equation (2.10) must be satisfied as as well. We have
Since conservative solutions are weak solutions we get
Summation over then yields
From the estimates in Proposition 2.11 we get
and hence
The second term can be estimated as follows
It remains to prove that the first term tends to zero as . We compute
Finally, we end up with
| (2.12) |
Since for every we have that almost everywhere, the convergence of (2.12) to (2.10) as follows from the proof of Proposition 7.19 in [8] and the fact that in . ∎
A satisfactory uniqueness theory for conservative weak solutions of the Hunter–Saxton equation would have ensured that all limits in Theorem 2.19 are equal, and thus that the sequence as a whole converges. Unfortunately, uniqueness of conservative solutions is unknown at the present time. On the other hand it is known that if the initial data is Lipschitz continuous, also the solution will be Lipschitz continuous for all , at least. In particular, as Example 1.1 and 3.2 indicate, when wave breaking occurs may be Hölder, but not Lipschitz continuous and may even be discontinuous.
In the next theorem, we consider the special case of weak conservative solutions such that are Lipschitz continuous for all .
Theorem 2.21.
Let be a conservative solution in the sense of Definition 2.18. Then the conservative solution is unique and there exists a constant , dependent on , , and , such that
| (2.13) |
Proof.
For any conservative solution with initial data , the characteristic equation
is uniquely solvable. Furthermore, the classical method of characteristics implies that the solution is unique and given by
Introduce and recall that denotes the characteristic starting at the grid point , then
Moreover, for all ,
For , define by
Then, following the same lines, one has
and
Since for all , we end up with
It is left to show (2.13). We start by comparing with . To that end let such that . Then there exists and in such that
and
Using , we have,
and
Combining the last two inequalities, we have
where . Moreover, we have by the same argument for that
Since for all , we have for all that
where we have used (2.4). ∎
3. Numerical examples
In this section we perform two experiments to see whether the scheme in Definition 2.5 converges to the desired conservative solution. We compare the numerical solutions with known, exact solutions in two cases, namely a peakon and a cusp. These two have been selected since the exact solutions represent two distinct challenges for the numerical solver. The peakon solution experiences wave breaking at and all energy is concentrated in a single point. Thus becomes discontinuous while becomes a constant function. The cusp solution, on the other hand, experiences wave breaking at each time with , but only an infinitesimal amount of energy concentrates at any given time.
In our examples we assume that the initial data is constant outside some finite interval . By (2.2) and Lemma 2.12, we then obtain that at each time , both and will be constant outside some finite interval . Thus for any , by choosing the computational domain accordingly, we can ensure that and are constant outside the computational domain for all . We look at the peakon example first.
Example 3.1 (Peakon solution).
We have initial data
with the exact solution
In Figure 2 the numerical solution is computed and compared with the exact solution at , , and . Figure 3 shows the error, when compared to the exact solution, and we see that the method captures the wave breaking phenomena in this example.




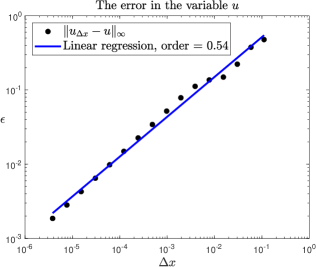
Example 3.2 (Cusp solution).
We have initial data
with the exact solution
In Figure 4 the numerical solution is computed and compared with the exact solution at , , and . Figure 5 shows the error when compared to the exact solution.
From Figure 3 and 5, we see that the best we can hope for in terms of convergence rates in for and for in the general case is . As uniqueness of conservative solutions is still an open problem, proving any form of convergence rate of the numerical method seems to be extremely challenging.
Remark 3.3.
Clearly we cannot expect a better convergence order than one half in the -norm for , since there exists such that , see Proposition 2.11.



References
- [1] A. Bressan and A. Constantin, Global solutions of the Hunter–Saxton equation, SIAM J. Math. Anal., 37,996–1026 (2005).
- [2] A. Bressan, H. Holden, and X. Raynaud, Lipschitz metric for the Hunter–Saxton equation, J. Math. Pures Appl., 94, 68–92 (2010).
- [3] A. Bressan, P. Zhang, and Y. Zheng, Asymptotic variational wave equations, Arch. Ration. Mech. Anal., 183, 163–185 (2007).
- [4] R. Camassa and D. D. Holm, An integrable shallow water equation with peaked solitons, Phys. Rev. Lett., 71, 1661–1664 (1993).
- [5] T. Cieślak and G. Jamróz, Maximal dissipation in Hunter–Saxton equation for bounded energy initial data, Adv. Math., 290, 590–613 (2016).
- [6] H.-H. Dai and M. V. Pavlov, Transformations for the Camassa–Holm equation, its high-frequency limit and the Sinh–Gordon equation, J. Phys. Soc. Japan, 67 3655–3657 (1998).
- [7] C. M. Dafermos, Generalized characteristics and the Hunter–Saxton equation, J. Hyperbolic Differ. Equ., 8, 159–168, (2011).
- [8] G. B. Folland, Real Analysis. Modern techniques and their applications. Second edition, Pure and Applied Mathematics. A Wiley- Interscience Publication, John Wiley & Sons, Inc., New York (1999).
- [9] K. Grunert and A. Nordli, Existence and Lipschitz stability for -dissipative solutions of the two-component Hunter–Saxton system, J. Hyperbolic Differ. Equ., 15, 559–597 (2018).
- [10] H. Hanche-Olsen and H. Holden, The Kolmogorov-Riesz compactness theorem, Expo. Math., 28, 385–394 (2010).
- [11] H. Holden, K. H. Karlsen, and N. H. Risebro, Convergent difference schemes for the Hunter–Saxton equation, Math. Comp., 76, 699–744 (2007).
- [12] H. Holden and N.H. Risebro, Front tracking for hyperbolic conservation laws, Second edition, Applied Mathematical Sciences, 152, Springer, Heidelberg (2015).
- [13] J. K. Hunter and R. Saxton, Dynamics of director fields, SIAM J. Appl. Math., 56, 1498–1521 (1991).
- [14] J. K. Hunter and Y. Zheng, On a completely integrable nonlinear hyperbolic variational equation, Phys. D., 79, 361–386 (1994).
- [15] J. K. Hunter and Y. Zheng, On a nonlinear hyperbolic variational equation. I. Global existence of weak solutions, Arch. Ration. Mech. Anal., 129, 305–353 (1995).
- [16] J. K. Hunter and Y. Zheng, On a nonlinear hyperbolic variational equation. II. The zero-viscosity and dispersion limits, Arch. Ration. Mech. Anal., 129, 355–383 (1995).
- [17] B. Khesin and G. Misiołek, Euler equations on homogeneous spaces and Virasoro orbits, Adv. Math., 176, 116–144 (2003).
- [18] Y. Miyatake, D. Cohen, D. Furihata, and T. Matsuo, Geometrical numerical integrator for Hunter–Saxton-like equations, Japan J. Indust. Appl. Math., 34, 441–472 (2017).
- [19] A. Nordli, A Lipschitz metric for conservative solutions of the two-component Hunter–Saxton system, Methods Appl. Anal., 23, 215–232 (2016).
- [20] S. Sato, Stability and convergence of a conservative finite difference scheme for the modified Hunter-Saxton equation, BIT, 59, 213–241 (2019).
- [21] R. Saxton, Dynamic instability of the liquid crystal director, In W. B. Lindquist (ed.), Current Progress in Hyperbolic Systems, 100, 325–330 (1989).
- [22] Y. Xu and C.-W. Shu, Local discontinuous Galerkin method for the Hunter-Saxton equation and its zero-viscosity and zero-dispersion limits, SIAM J. Sc. Comput., 31, 1249–1268 (2009).
- [23] Y. Xu and C.-W. Shu, Dissipative numerical methods for the Hunter–Saxton equation, J. Comput. Math., 28, 606–620 (2010).
- [24] Z. Yin, On the structure of solutions to the periodic Hunter–Saxton equation, SIAM J. Math. Anal., 36, 272–283 (2004).
- [25] P. Zhang and Y. Zheng, On the existence and uniqueness of solutions to an asymptotic equation of a variational wave equation, Acta Math. Sin. (Engl. Ser.), 15, 115–130 (1999).
- [26] P. Zhang and Y. Zheng, Existence and uniqueness of solutions of an asymptotic equation arising from a variational wave equation with general data, Arch. Ration. Mech. Anal., 155, 49–83 (2000).