Non-crossing permutations for the KP solitons under the Gel’fand-Dickey reductions and the vertex operators
Abstract.
We give a classification of the regular soliton solutions of the KP hierarchy, referred to as the KP solitons, under the Gel’fand-Dickey -reductions in terms of the permutation of the symmetric group. As an example, we show that the regular soliton solutions of the (good) Boussinesq equation as the 3-reduction can have at most one resonant soliton in addition to two sets of solitons propagating in opposite directions. We also give a systematic construction of these soliton solutions for the -reductions using the vertex operators. In particular, we show that the non-crossing permutation gives the regularity condition for the soliton solutions.
1. Introduction
The Kadomtsev-Petviashvili (KP) equation is a two-dimensional nonlinear dispersive wave equation given in the form,
| (1.1) |
The KP equation is integrable, and has infinitely many symmetries represented by the commuting flows. The parameters of the flows are expressed by , in particular, we denote for the KP equation. The set of all the flows defines the KP hierarchy, whose first member is the KP equation, and the variable is now considered as a function of . The real regular soliton solutions of the KP equation, referred to as the KP solitons, has been recently classified in [2, 9] (see the book [7] for the review of these results). Each KP soliton can be determined by a pair of two real data , referred to as soliton parameters, where and an matrix , the totally nonnegative (tnn) Grassmannain defined by the set of -dimensional subspaces in with all nonnegative maximal minors of . We also recall that the element can be uniquely parameterized by the derangement (permutation without fixed point, i.e. no 1-cycle) of symmetric group , denoted by . Then the soliton solution is given in terms of the -function (see e.g. [7]),
| (1.2) |
where the -function is given by
| (1.3) |
The matrix function is defined by
In this paper, we classify the KP soliton solutions under the Gel’fand-Dickey -reductions (hereafter simply -reductions) of the KP hierarchy. For example, the -reduction implies , and the KP equation with the boundary condition as gives
where etc. The KdV equation admits -soliton solution, whose soliton parameters are given by
where and . For example, one soliton is determined by and , and it has the form,
where . The derangement corresponding to the matrix of the -soliton solution is given by the product of 2-cycles,
| (1.4) |
where 2-cycle implies the transposition . Note here that all the 2-cycles in (1.4) form a nesting (see below, also [3] for the definition). Each soliton with the parameter in the -soliton solution is represented by the transposition , which is considered as the derangement associated to , i.e. and .
One should also note that the -parameters are the roots of the second order polynomials of ,
| (1.5) |
which is a direct consequence of the 2-reduction of the KP hierarchy. We refer to the polynomial as the spectral curve of the soliton solution for the 2-reduction, and will extend (1.5) to the general case of -reductions.
The (good) Boussinesq equation is given by the 3-reduction , i.e.
| (1.6) |
In the physical coordinates, the variable should be considered as the time variable. One should note that under the boundary condition as , this equation does not have a regular soliton solution as the steady propagating wave with any constant . In order to obtain a regular soliton solution, one needs to have a nonzero boundary condition as . With the change , Eq. (1.6) becomes
| (1.7) |
One can easily check that this equation admits a regular soliton solution when . Note that (1.7) can be also obtained by change of coordinates in the KP equation with , i.e.
Considering the 3-reduction for new coordinate, i.e. , and identifying , this equation gives (1.7). As we will show, this change of coordinates is a crucial step to classify the regular soliton solutions under the -reductions for . We then choose the -parameters as the roots of the cubic polynomial of for given constant ,
which is the spectral curve of solitons for the 3-reduction. As one of the main results (Theorem 4.2), we give the regular soliton solutions of the Boussinesq equation in (1.7), whose the soliton matrix is parametrized by the derangement in the cycle notation either
where the cycles are all non-crossing, e.g. there is no case like or etc (see Definition 3.3 below for the details). One should note that the regular soliton solution can include at most one 3-cycle, which represents a resonant soliton solution with Y-shape, sometimes called Y-soliton (see e.g. [7]). This result implies that there are two sets of line solitons showing in 2-cycles propagating opposite directions, and each soliton gets positive (repulsive) phase shift by interacting with solitons from the same set, and negative (attractive) phase shift from the other set. Thus, the set of those solitons may provide a bidirectional model of soliton gas as recently discussed in [1].
Remark 1.1.
As far as we know, there was no classification of “regular” soliton solutions of the (good) Boussinesq equation (see e.g. [13]). Our result is then gives the first classification of regular soliton solutions of the Boussinesq equation, which states that there is no regular soliton solutions including more than one resonant solution. Also note that singular solutions are easily obtained.
We extend these results to the general -reduction as follows. First define a monic polynomial of degree of , referred to as a spectral curve of -reduction, given by
| (1.8) |
Here the polynomial can be also obtained by the change of coordinates in the KP hierarchy as in the case of 3-reduction, . The main purpose of the spectral curve in the form (1.8) is to find the real roots for the soliton parameter i.e. and if .
Then our main theorem (Theorem 3.8) can be stated as follows.
Theorem 3.8 Define the soliton parameter as the ordered set of
where each is a root of , and is a subset of with . Here . For each , take , and set . Then for each pair , construct the matrix element , so that the corresponding derangements are mutually non-crossing for . Then the regular soliton solution of the -reduction is given by the soliton parameters and associated with a (-)direct sum of the matrices ,
where implies that the columns in the matrices are ordered according to the ordered set of the -parameters. Also the derangement is given by
that is, the soliton solution generated by the -function with consists of these soliton solutions associated with , where .
Here what we mean by the non-crossing in the derangements is that any cycle in has no crossing with all the cycles in other derangemants (Definition 3.3).
The paper is organized as follow. In Section 2, we provide the background information on the KP hierarchy and the Gel’fand-Dickey -reductions. We also give the determinant formula of the KP solitons in terms of the -functions (see also e.g. [7]). In Section 3, we define a modified form of the -reduction for real regular solitons of the -reduction. This is the main section of the paper. We introduce an -th polynomial , referred to as the spectral curve of the -reduction, whose roots give real soliton -parameters. We show that the polynomial is a versal deformation of the degenerate polynomial , and the deformation parameters are obtained by the change of coordinates. We then consider a matrix together with the roots of the spectral curve for a soliton solution. A general solution is then constructed by several parameters , which give the roots and the matrix . We then define a -direct sum of the matrices (Definition 3.1), and introduce the notion of non-crossing matrices (Definition 3.3). Then we show that the matrices are mutually non-crossing, then the the direct sum of these matrices can be totally nonnegative, that is, the soliton generated by the -direct sum is regular (Theorem 3.8). In Section 4, we give the detailed study of the Boussinesq case, the 3-reduction. The main result is explained above (Theorem 4.2). We also discuss a possible application of the result to a bidirectional model of soliton gas (see e.g. [1]). In the final section, Section 5, we give a systematic method to construct the KP solitons under the -reductions using the vertex operators. We show that the non-crossing property of the matrices associated with vertex operator gives the regularity of the solitons generated by applying several vertex operators (Proposition 5.5). We also remark that the regularity of the soliton solutions generated by the vertex operators has not been discussed before.
2. Background
Here we give a brief review of the KP hierarchy and the Gel’fand-Dickey -reductions of the KP hierarchy. We also give the Wronskian formula of the -function for the KP solitons, in which we provide the notions of the totally nonnegative Grassmannians and the permutations to label their elements. Most of the materials in this section can be also found in [7].
2.1. The KP hierarchy
The KP hierarchy is formulated on the basis with a pseudo-differential operator,
| (2.1) |
where is a derivative satisfying and the generalized Leibniz rule for a smooth function ,
Note that the series terminates if and only if is a nonnegative integer. The functions ’s in depend on an infinite number of variables . Each variable in gives a parameter of the flow in the hierarchy, which is defined in the Lax form,
| (2.2) |
where represents the polynomial (differential) part of in . The solution of the KP equation (1.1) is given by . The compatibility among the equations in (2.2), gives
which is called the Zakharov-Shabat equations.
The Lax operator (2.1) can be expressed in the form,
where is called the dressing operator given in the form,
Then the functions ’s in can be expressed by ’s in . For example, we have
Then, from the Lax equation, the dressing operator satisfies
| (2.3) |
which is sometimes called the Sato equation. The KP soliton can be obtained as a special solution of the Sato equation as explained below.
2.2. truncation and the -function
Here we explain the Wronskian formula of the -function, which is obtained by truncating . A finite truncation of with some positive integer is given by
The invariance of the truncation under (2.3) leads to the -th order differential equation for some function ,
where . Let be a fundamental set of solutions of the equation . Then the coefficients ’s are given by
| (2.4) |
where is the elementary Schur polynomial of degree and , which is defined by
| (2.5) |
And is called the -function, which is expressed by the Wronskian form (Cramer’s rule),
| (2.6) |
For the time-evolution of the functions , we consider the following (heat) hierarchy,
| (2.7) |
which gives the solution of the Sato equation (2.3). Then the solution of the KP hierarchy can be expressed in terms of the -function by (1.2), i.e.
2.3. KP solitons
The soliton solutions are defined by a finite set of exponential solutions of (2.7). Let be the set of solutions given by
where whose elements are ordered as , and is an real matrix with full rank. Let be an ordered subset of the index set . Then the -function (2.6) becomes (1.3), and using the Binet-Cauchy lemma, the -function can be expressed by
| (2.8) |
where is the minor of associated with the ordered subset , and is the matroid defined by
Note here that the ordering in the parameters implies for all and . Then it was shown in [10] that the regular soliton solutions, referred to as KP solitons, are obtained if and only if is an element of the totally nonnegative Grassmannian, which is defined as
For example, one line-soliton solution is determined by and for , i.e. and
which is referred to as a line-soliton solution of type, or simply -soliton.
Theorem 2.1.
Let be the pivot set and be the nonpivot set of . Then there exists a unique derangement of the symmetric group associated with the matrix , denoted by , so that the KP soliton has the following asymptotic structure.
-
(a)
For , there are -solitons with for .
-
(b)
For , there are -solitons with for .
It would be useful to express the derangements in the chord diagrams defined as follows (see e.g. [7]).
Definition 2.2.
Consider a line segment with marked points labeled by the -parameter . Then the chord diagram associated with a derangement in the symmetric group is defined by
-
(a)
if (exceedance), then draw a chord joining and on the upper part of the line, and
-
(b)
if (deficiency), then draw a chord joining and on the lower part of the line.
Note that if the derangement is given by a single -cycle, , then all the points are joined in the chord diagram.
Example 2.3.
Let be a permutation in the cycle notation, whose chord diagram is given by
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/95cfb1e9-a1ef-4ff6-8d92-1cb6e7b25e02/Chorddiagram.png)
It was also shown in [5, 14] that the number of free parameters in can be found from the chord diagram, and it is given by
| (2.9) |
which is the dimension of the positroid cell parametrized by the derangement [14, 9]. The positroid cell decomposition of the irreducible totally nonnegative Grassmannian is given by
where is the set of derangements, and the irreducibility implies that for each element , the matrix satisfies
-
(a)
there is no zero column,
-
(b)
there exists at least one nonzero elements in each row besides the pivot.
In the example 2.3, the dimension is given by
which is the total number of positive parameters .
2.4. The Gel’fand-Dickey -reductions
Then the Gel’fand-Dickey -reduction (sometime called the -th generalized KdV hierarchy, see e.g. [11]) is defined by
that is, the -th power of becomes a differential operator. This means that the functions ’s are determined by variables in in the form,
| (2.10) |
where the functions is given by the differential polynomial of and their derivatives with respect to . For example, when , we have
We can also see from that these functions have the following form,
| (2.11) |
where is the differential polynomial of with . For example, when , we have
From (2.2) with (2.10), the -reduction gives the constraints,
that is, all the variables do not depend on the times . Following [11], we define the -reduction as follows. Let be a partition of with , i.e. , and define . Then the -reduction is defined by a condition for the functions in (2.7) given by
| (2.12) |
for some constant and . Using (2.7), this leads to
Looking for an exponential solution to this equation, we have the degenerate polynomial of , i.e.
| (2.13) |
which has the complex roots, the -th roots of (see [11], where the complex solitons associated with thses roots were discussed).
One should note that the reduction equation (2.12) implies that we have with , which shows that the -function is given by . Then the variables in (2.11) has no dependency on the flow parameters .
In the next section, we define a versal deformation of the degenerate polynomial (2.13) to find the real and regular solutions.
3. Spectral curves and the -functions for the KP solitons under the -reductions
Here we first introduce the spectral curve defined as a versal deformation of the degenerated polynomial (2.13) in order to obtain a set of exponential functions for the basis of real solitons. Then we construct the -function for a particular basis of exponential functions and describe the corresponding soliton solution in terms of the permutation.
3.1. The spectral curve and the -function
We consider a versal deformation of the -th degree polynomial (2.13) given by
| (3.1) |
where are real constants (deformation parameters). We particularly choose ’s , so that (3.1) has distinct real roots , which is (1.8), i.e. the versality implies that
We call this spectral curve for the KP soliton under the -reduction.
We note that the versal deformation (3.1) can be realized by the change of coordinates,
| (3.2) |
In the new coordinates, the derivatives are
Then we impose that the condition for the -reduction in the new coordinates becomes
As a particular solution of this equation, we consider an exponential function . Then the parameter satisfies , hence we have independent exponential solutions,
Notice that in the original coordinates in (3.2), we have
| (3.3) |
i.e. is a solution of the -reduction (2.12), and .
3.2. Non-crossing permutations and the main theorem
Here we consider several values of , say for . For each , let be a subset of with . We then consider in (3.1) for , and define the soliton parameter , which is the ordered set of the roots of ,
where . Since all are distinct, this gives that for each , there exists a unique pair so that , which gives a bijection for each . We also write
| (3.5) |
With this ordering, we define
where with . Note that . Here we also take , and let be the corresponding permutation in the cycle notation,
where is the number of cycles, and is a -cycle for .
Let . Then we define an matrix combining all the matrices for , which we call a -direct sum.
Definition 3.1.
A -direct sum of the matrices for is defined by
where with for . In particular, the row index is assigned so that the direct sum is an element of , i.e. it is in the reduced row echelon form (RREF). Notice that in general, it is not totally nonnegative.
Example 3.2.
Consider a case with , and two different ’s in the order . Take
The spectral curve can be expressed as in Figure 1.

These roots satisfy the following order, giving the bijection ,
which gives
As an example, consider the following permutations,
whose chord diagram is
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/95cfb1e9-a1ef-4ff6-8d92-1cb6e7b25e02/7-reductioncd.png)
The corresponding matrices and are given by
where are positive constants, (see e.g. [7] for the method to construct from permutation ). The -direct sum is then given by
Note that this is not totally nonnegative, e.g. . This is due to the relocation of the column vectors.
We now define the notion of non-crossing of the permutations.
Definition 3.3.
Let and be two permutations in cycle notation. Then we define
-
(a)
Two cycles and are non-crossing, if the corresponding chord diagrams have no crossing chords between two permutations.
-
(b)
Two matrices and for are non-crossing, if the corresponding permutations and are noncrossing.
Note that the matrices and in Example 3.2 are non-crossing.
An immediate consequence of this definition is the following.
Proposition 3.4.
If and for are not non-crossing, then the -direct sum is not totally nonnegative.
Proof. Recall that the dimension of the totally nonnegative cell can be computed from the formula (2.9). Note that the -direct sum has an extra crossing. If is totally nonnegative, then the number of free parameter (or dimension) in the -direct sum should be more that the sum of the free parameters in and .
In order to characterize the non-crossing matrices, let us first define the following set for the matrix ,
where is the matroid of , i.e.
Then the following lemma is immediate by the definition of the -direct sum and using the Laplace expansion for the minors.
Lemma 3.5.
Let be the totally non-negative matrix, i.e. , whose permutation is given by
This implies that the set of the asymptotic solitons in generated by is the sum of these solitons generated by and . Then we can show that Lemma 3.5 implies the following.
Corollary 3.6.
The set of the dominant exponentials in the soliton solution generated by the totally nonnegative matrix is the same as that of the solution generated by the matrix .
Proof. From Lemma 3.5, one can assume that there exists a minor such that the corresponding exponential with by in(3.5) is dominant in some asymptotic region of -plane with large . Then moving -coordinate, the following two cases are possible,
-
(a)
there exists with , so that dominates over ,
-
(b)
there exists with , so that dominates over ,
where we have used the fact that there is only one index change in the minor at the boundary of two dominant regions (more precisely, if for , see [2] for the details). The case (a) implies that there is an asymptotic soliton given in , and the case (b) shows the existence of the soliton in .
Note that these solitons generated by the -direct sum are singular in general. Now we can show the following proposition.
Proposition 3.7.
Let and are non-crossing. Then the -direct sum becomes totally nonnegative by adjusting the signs in the nonzero entries in and .
Proof. Since and are non-crossing, we have from Lemma 3.5 that the number of free parameters of is just the sum of those in and , and the number of free parameters in the totally nonnegative matrix is the same as that of . These free parameters are given by the nonzero entires of the matrices and . Let be a nonzero entry corresponding to that in or , where is either in or . Then there exists a unique pair , so that , where and . Note also that . This determines the signs of all nonzero entries in . Since is unique and have the same sets of minors as , we have that for all and .
As the summary of the results in this section, we have the main theorem.
Theorem 3.8.
Suppose that and are non-crossing for any . Then we can make the combined matrix totally nonnegative, and we have
where denotes the totally nonnegative matrix associated to , i.e. with and .
This theorem implies that the soliton solution generated by the soliton parameters with the sorted coordinates () and is regular, that is, it is a KP soliton.
4. Regular solitons for the Boussinesq equation
Based on the previous section, we give the detailed study of the real regular soliton solutions of the Boussinesq equation.
4.1. The Boussinesq equation from the KP theory
It is well known that the Boussinesq equation is given by the 3-reduction of the KP hierarchy, i.e. . We write
where and with the Lax operator (2.1). Then the Boussinesq equation is obtained by the Lax equation,
where . This gives
| (4.2) |
The functions and can be represented by the -function,
| (4.3) |
Eliminating in (4.2), we have
| (4.4) |
Notice that this is not a standard form of the Boussinesq equation. Also note that this equation does not have a soliton solution with the vanishing boundary condition, i.e. as . In order to obtain a regular soliton (exponential) solution, we need to impose a non-vanishing boundary condition. Assuming , (4.4) becomes
| (4.5) |
In terms of the -function in (4.3), this shift of implies
One can easily check that (4.5) admits a soliton solution when . This shifted form of the Boussinesq equation can be also obtained by the coordinate change in the KP equation,
| (4.8) |
where are arbitrary constants. After the change of coordinates (4.8), the KP equation (1.1) can be expressed by
| (4.9) |
Then we consider a stationary solution in (the 3-reduction), that is, . By choosing and , the equation (4.9) becomes (4.5). As was shown in the previous section, the change of coordinates now leads to the versal deformation of the spectral curve, i.e.
| (4.10) |
Note here if , we have three real roots for some , which gives a real exponential basis for the soliton solution. Then the soliton solutions of the Boussinesq equation,
| (4.11) |
are generated by the -function in the following form,
| (4.12) |
where is given by a linear combination of the exponential functions (3.3). In this section, we consider the Boussinesq equation in the following standard form,
| (4.13) |
where we have taken .
4.2. One soliton solution of the Boussinesq equation
A soliton solution of the Boussinesq equation (4.13) as one soliton solution of the KP equation with is given by
| (4.14) |
where is a pair of roots of the curve (4.10). The amplitude and the velocity of the -soliton is then given by
Since the parameters satisfy the curve (4.10), the amplitude and the velocity have the relations. Note first that the roots of the spectral curve (4.10) satisfy the symmetric polynomials,
Then from the first two equations, we see that any pair of two roots of (4.10) satisfies the elliptic curve,
| (4.15) |
We note here that there are two groups of solitons having opposite propagating directions. The details can be computed as follows. The elliptic curve (4.15) and the cubic curve (4.10) are illustrated in Figure 2.
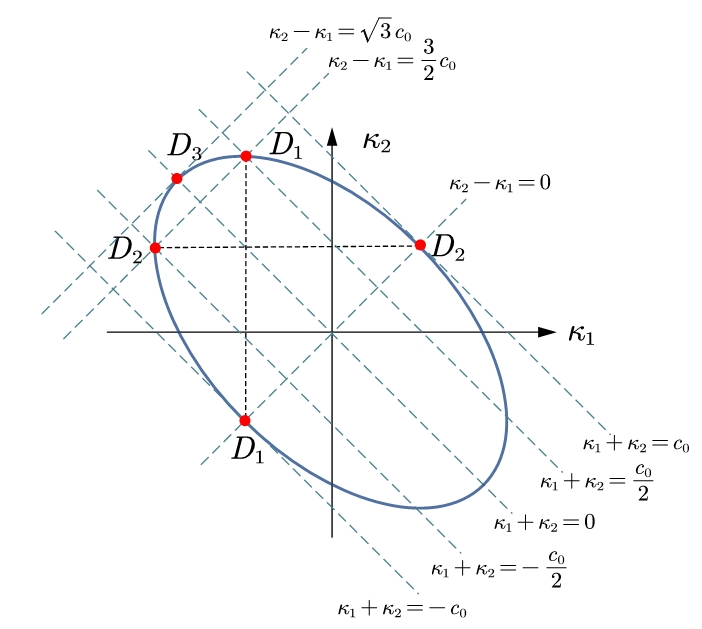
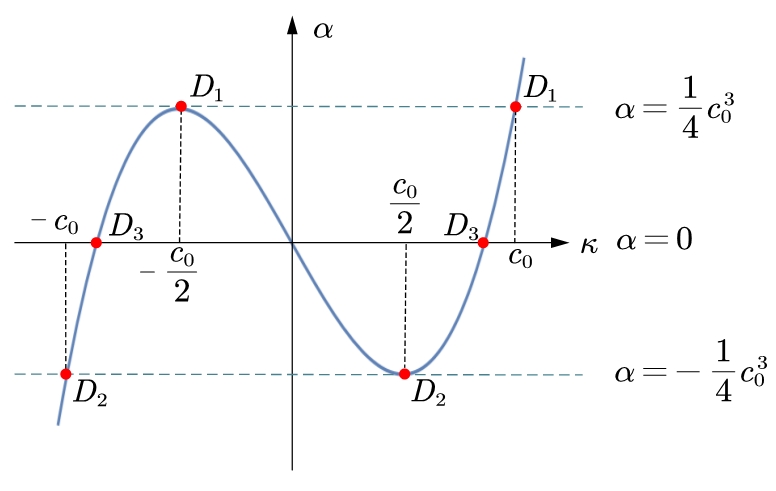
The three roots at the points and in Figure 2 are
Then we note that there are three types of solitons:
-
(a)
the right propagating solitons with
-
(b)
the slow propagating solitons with
-
(c)
the left propagating solitons with
Note that the amplitude of the soliton is limited by .
Remark 4.1.
We remark that the linear wave of the Boussinesq equation satisfies the dispersion relation,
This is derived from the linear part of (4.13) with . Note here that , that is, the linear waves propagate faster than the solitons (soliton resolution).
4.3. Multi-soliton solutions
We now construct a general soliton solution of the Boussinesq equation (4.13) by taking several different values of in the spectral curve (4.10). For a proper choice of , we have three real distinct roots as shown below.

We have the following two cases for the index set , can be chosen in the following two cases:
-
(a)
, i.e. we take two roots . There are three different choices, and the soliton solution is given by (4.14) with (these are the solitons discuss above).
-
(b)
, i.e. we take all three roots. The soliton solution in this case has a resonant interaction with three solitons -, - and -types. There are two types of resonant solution with or . These soliton solutions form a -shape resonant structure as shown in the figure below.
The permutation diagrams corresponding to these solutions are given by


A general soliton solutions of the Boussinesq equation can be constructed by a -direct sum of non-crossing matrices for with some . Then from Theorem 3.8, we have the following theorem.
Theorem 4.2.
The -function of any real regular soliton solution of the Boussinesq equation (4.5) can be generated by one of the following three cases with the soliton parameters and .
-
(I)
We take the following sets of the roots for ) with and
Then, we have the sorted soliton parameter with ,

Figure 5. The choices of roots in the case (I), and the permutations of the soliton solutions having one -soliton. Then, there are two cases in the choice of -direct sum , where or while for .
-
(a)
The chord diagram shown in the top right shows , and the corresponding derangement is
In this case, we have with and .
-
(b)
The for the bottom right is the same except the identification of ,
In this case, we have with and .
-
(a)
-
(II)
We take just two roots of for each , and take , , i.e. the soliton parameter with . There are two cases as shown in the figures below.

Figure 6. The choice of the roots for the case (II) and the permutation of soliton solution consisting of two groups propagating opposite directions. 
Figure 7. The soliton solution of the type in Figure 7 with a slow moving large amplitude soliton.
4.4. Discussions
In this section, we studied the (good) Boussinesq equation and classified the general solutions of the equation. We hope that our results provide a model of bidirectional soliton gas as discussed recently in [1]. We also found that there exists at most one resonant solution (Y-shape soliton) or one slow propagating soliton with large amplitude for the regular solitons (see [13]). It might be interesting to discuss the effect of those special solitons among two groups of counter propagating solitons. However, it may not be so physical if the (good) Boussinesq equation is used for a shallow water wave model. This is because that a larger soliton has a slower velocity, and even that the largest soliton has the zero velocity.
Although we did not discuss the details of the higher reductions in this paper, one can have different groups having the distinct velocities for the -reduction. Their interaction properties such as the phase shifts are different when they interact with other solitons from different groups. It is also interesting to note that one can give additional characters, like amplitudes and velocities, by a spectral curve with different deformation parameters. We will report the details on physical applications of the -reductions of the KP equation in a future communication.
5. Vertex operator construction of the KP solitons under the -reductions
It is well known that applying the vertex operator [6, 12], one can construct the soliton solutions of the KP hierarchy. However, as far as we know, the regularity of those solutions have not been discussed. In this section, we determine the conditions to the vertex operators, so that these operators generate the regular soliton solutions under the -reductions.
The vertex operator is defined by the following form with arbitrary parameters for some positive integers and ,
The following lemma is well-known and easy to show.
Lemma 5.1.
The vertex operator satisfies
where the normal ordering symbol implies to move differential operators to the right. It then follows the following properties
5.1. The vertex operators on
In the present paper, the parameters are determined by the roots of the spectral curve for each , i.e. and for some . As in the previous section, we take , and consider . We take an (irreducible) element . Let and be the sets of pivots and non-pivots of the matrix , i.e. . We use the following labels for the nonzero elements in ,
where is the column index of the nonzero element in the -th row and -th column. That is, the nonzero elements except the pivots in the matrix are
Following [8], we give the following order for the indices ,
| (5.1) |
where with and . That is, the total number of the nonzero elements in is .
Let us define a positive matrix as
Then we have the following lemma.
Lemma 5.2.
The signs of nonzero entries in is determined by the positivity conditions , i.e.
Proof. For the pair of the pivot and the non-pivot indices, let be the numbers given by
Then we have
That is, we claim that implies . This is shown by noting that there is a unique index set such that
where denotes the identity matrix of . Since , . This proves the lemma.
With the positive matrix , we define our vertex operator in the following form similar to that given in [12],
| (5.2) |
Note here that the parameters in are from , so that these satisfy the condition in Lemma 5.1. Then we have the following proposition.
Proposition 5.3.
The -function in (3.4) with the soliton parameters can be expressed by
where is the pivot index set of .
Proof. We first note (Theorem 3.10 in [8]) that we have , called the -theta function defined by
where with
and
where we have used the order (5.1). Then for with , the in becomes
The product term with and gives
where we have used Lemma 5.1.
The higher products can be calculated in the similar way. One should note that some of the terms vanish, when or (see Lemma 5.1).
Since the solution of the KP equation is given by (1.2), i.e. , we consider the -function as in the form , and we write
| (5.3) |
5.2. The vertex operator construction of the KP solitons under the -reduction
Here we consider a -function generated by several different ’s, that is, for some ,
| (5.4) |
where are given by (5.2) with the positive matrices determined by non-crossing matrices , respectively.
Let be the indices of the pivot and non-pivot columns in the -th row of the nonzero entries in . Then we have
Then we have the following lemma.
Lemma 5.4.
If the matrices and are non-crossing, then we have
Proof. Since the permutation and are non-crossing, we have either
These orderings implies the assertion.
Then it is immediate to have the following proposition.
Proposition 5.5.
Suppose that for are mutually non-crossing. Let be the vertex operators associated with these matrices. Then the -function (5.4) generated by these vertex operators gives a KP soliton (regular) associated with a matrix in , where and .
One should remark that the -function (5.4) is different from that associated with the totally nonnegative matrix given by the -direct sum of these matrices. However, those solutions have the same permutation, that is, their corresponding matrices are different but they are in the same cell in . We give the following example to illustrate the remark.
Example 5.6.
We continue Example 3.2 () with
where the numbers are in the sorted coordinates. The corresponding totally nonnegative matrices are
where the signs of the nonzero elements can be determined by Lemma 5.2 (see below).
From the nonzero elements in the matrices and , the vertex operators for these matrices are given by
Here the positive matrices and are given by
where
and
Note here that Lemma 5.2 shows that the sign and others are positive.
From these vertex operators, we have the -functions given by , i.e.
where .
The -function generated by those vertex operators are given by
Since all the operators commute, we have
Now we give the vertex operator associated with the totally nonnegative matrix from the -direct sum , which is given by
Then the corresponding positive matrix is
where the positive elements are given by, for example,
Note that we have and others are positive (i.e. they have the different signs in the cases and ).
Then the -function associated with is given by
where the vertex operator associated with is given by
One should note that this vertex operator is not the same as . We have the following relations, e.g.
Notice that both and are positive. This difference implies that they have different phase shifts for solitons contained in the solutions due to the different values of the free parameters. We might say that they are topologically the same, and we say .
Acknowledgements. The authors appreciate a research fund from Shandong University of Science and Technology. One of the authors (C.L) is supported by National Natural Science Foundation of China (Grant No. 12071237).
Declarations.
-
•
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
-
•
The authors declare no conflicts of interest associated with this manuscript.
References
- [1] T. Bonnemain and B. Doyon, Soliton gas of the integrable Boussinesq equation and its generalised hydrodynamics. (arXiv:2402.08669).
- [2] S. Chakravarty and Y. Kodama, Classification of the line-solitons of KPII. J. Phys. A: Math. Theor. 41 (2008) 275209.
- [3] S. Chakravarty and Y. Kodama, A generating function for the -soliton solutions of the Kadomtsev-Petviashvil II equation. Comtemp. Math. 471 (2008) 47–67.
- [4] S. Chakravarty and Y. Kodama, Soliton solutions of the KP equation and applications to shallow water waves. Stud. Appl. Math. 123 (2009) 83–151.
- [5] S. Corteel, Crossing and alignments of permutations. Adv. Appl. Math. 38 (2007) 149–163.
- [6] E. Date, M. Kashiwara, M. Jimbo, and T. Miwa, Transformation groups for soliton equations. Nonlinear Integrable Systems Classical Theory and Quantum Theory by M. Jimbo and T. Miwa (eds), World Sci, Singapore. (1983) 39-119.
- [7] Y. Kodama, KP solitons and the Grassmannians: Combinatorics and Geometry of Two-Dimensional Wave Patterns, Springer Briefs in Mathematical Physics 22, (Springer, Singapore 2017).
- [8] Y. Kodama, KP solitons and the Riemann theta functions. Lett. Math. Phys. 114 (2024), (https://doi.org/10.1007/s11005-024-01773-4).
- [9] Y. Kodama and L. Williams, KP solitons and total positivity for the Grassmannian. Invent. Math. 198, (2014) 637-699.
- [10] Y. Kodama and L. Williams, The Deodhar decomposition of the Grassmannian and the regularity of KP solitons. Adv. Math. 244 (2013) 979-1032.
- [11] Y. Kodama and Y. Xie, Space curves and solitons of the KP hierarchy. I. The -th generalized KdV hierarchy. SIGMA 17 (2021), 024.
- [12] A. Nakayashiki, Vertex operator of the KP hierarchy and singular algebraic curves. (arXiv:2309.08850).
- [13] A. G. Rasin and J. Schiff, Bäcklund transformations for the Boussinesq equation and merging solitons. J. Phys. A: Math. Theor. 50 (2017) 325202.
- [14] L. Williams, Enumeration of totally positive Grassmann cells. Adv. Math. 190 (2005) 319–342.