Negative Imaginary Systems Theory for Nonlinear Systems: A Dissipativity Approach
Abstract
Negative imaginary (NI) systems theory is a well-established system theoretic framework for analysis and design of linear-time-invariant (LTI) control systems. In this paper, we aim to generalize negative imaginary systems theory to a class of nonlinear systems. Based on the time domain interpretation of the NI property for LTI systems, a formal definition in terms of a dissipativity with an appropriate work rate will be used to define the nonlinear negative imaginary (NNI) property for a general nonlinear system. Mechanical systems with force actuators and position sensors are nonlinear negative imaginary according to this new definition. Using Lyapunov stability theory, we seek to establish a nonlinear generalization of the NI robust stability result for positive feedback interconnections of NNI systems. An example of a nonlinear mass-spring-damper system with force as input and displacement of the mass as output will be presented to illustrate the applicability of the NNI stability result. Furthermore, the case of NI systems with free motion will be investigated in the nonlinear domain based on the dissipativity framework of NNI systems.
keywords:
Negative Imaginary Systems; Nonlinear Control Systems; Dissipativity Theory.and
1 Introduction
One of the most appealing tools in the field of nonlinear control design is the ”classical” dissipativity and passivity theory which characterizes the dissipation of energy in the system with respect to a supplied energy rate from the environment (see [34, 35, 4, 33] for detailed accounts). However, many systems that dissipate energy in the physical sense don’t fall into this classical framework. Concretely speaking, many real-world systems can be considered where the input is some form of mechanical or electrical force, and the output is a corresponding displacement. In this case, the associated energy pair is not , but and the systems are dissipative (passive) from to . For instance, flexible structures with colocated force actuators and position sensors are passive (or dissipative) from the input to the derivative of the output (instead of the output as in the classical passivity theory). For further examples of systems which are passive from the input to the time-derivative of the output were investigated in [1, 29, 14, 15, 27, 30, 4].
As can be seen from these examples, the analysis and robust control of such systems cannot be handled directly using the classical dissipativity and passivity theory where, on one hand, systems with rate sensors and force actuators often violate the standard sector condition for passivity. On the other hand, the restriction of collocated rate sensors and actuators is a stringent one, and excludes many applications. These observations motivates the need for an extended framework of the dissipativity and passivity of the systems to allow for more general supply rates which involve derivatives of the inputs and outputs. This in turn will enable replacing rate sensors on a structure with displacement sensors.
In this regard, negative imaginary systems theory has proven to be an effective tool in the analysis and control design of positive real LTI systems [31, 19]. NI systems theory extends and complements range of applicability of passivity theory for LTI systems with relative degree greater than one. An NI LTI system is a passive system from the input to the derivative of the output. One of the fruitful results in the existing NI literature pertaining to the stability robustness of positive feedback interconnections of LTI systems, as shown in Figure 1, is given in [31]. This LTI NI stability result shows that a necessary and sufficient condition for internal stability when the plant is NI, with transfer function matrix , and the controller is a strictly negative imaginary (SNI) system, with transfer function matrix , is given by the following DC-gain condition:
| (1) |
where denotes the maximum eigenvalue of a matrix with only real eigenvalues. This means that the internal stability of such a feedback system is governed by the loop gain at steady-state.
This NI stability result is of practical importance and has been employed in a wide variety of control applications including, for instance, robust vibration control of flexible structures, atomic force microscopy, and nano-positioning systems. Also, NI systems theory has been used for the robust control of highly resonant flexible structures with colocated position sensors and force actuators [31, 18, 25, 6, 3, 21, 24]. For more exposure on applications of NI theory in the literature see, for instance, [2, 6, 7, 26].
In real-world applications, most physical and engineering systems exhibit nonlinear behaviour, which in general makes a controller design difficult. We aim in this paper to develop an energy-based control framework for the analysis and design of dissipative (passive) system with supply rates involve the time derivative of input and output of the system. In the literature, different approaches have been proposed to deal with analysis and control design of such type of systems, see [32] on networked NNI systems, [1] on counter-clockwise (CCW) systems which is closely related to NNI systems, and our conference paper [10] on single-input-single-output (SISO) NNI systems. However, this paper differs from these works in significant ways: (a) while the paper [32] builds on the results of [10], this paper establishes the stability robustness of the feedback interconnections of NNI systems under reduced set of assumptions; (b) we generalize here the results of [10] to multi-inputs-multi-outputs (MIMO) nonlinear negative imaginary systems and, in addition, we investigate the case of NI systems with free motion in the nonlinear domain; (c) [1] investigated the boundedness of the solution of CCW feedback systems whereas we establishes the robust asymptotic stability of NNI feedback systems.
Transforming from the classic frequency domain to time domain for analysis of NNI systems, raises the need for time-domain interpretation of the NNI property. Motivated by the time-domain characterization of the negative imaginary property for LTI systems, we introduce a formal definition for the nonlinear negative imaginary property of a general nonlinear system. The NNI definition will be given in terms of a dissipation inequality with an appropriate work rate. This formulation extends and complements the existing classical dissipativity and passivity framework to allow for more general supply rates which involves deivative of the inputs and outputs. Flexible structures with colocated force actuators and position sensors are dissipative according to this new formulation.
By defining the NNI property in a time-domain dissipativity framework, we seek to extend the above LTI NI stability result to a nonlinear setting. In particular, we generalize the above mentioned NI stability result to establish the stability robustness of a positive feedback interconnection of NNI systems. In order to handle these NI nonlinear systems, a generalization of the DC-loop gain condition (1) to the nonlinear setting will be developed. Then, under mild technical assumptions in the steady-state, a Lyapunov-based approach and an invariance principle will be employed to guarantee the robust stability of the feedback system. The nonlinear NI stability result will be shown to reduce to the case of a feedback interconnection of MIMO LTI negative imaginary systems, where the plant may have poles on the imaginary axis except at the origin. The applicability of the NNI stability result will be illustrated through an example of a nonlinear mass-spring-damper system with force as input and displacement of the mass as output.
Next, the nonlinear negative imaginary systems theory will be further extended to the case of free motion. It will be shown that, under suitable assumptions, a cascade connection of nonlinear system, affine in the input, and single integrator will lead to a nonlinear negative imaginary system. Robust stability result will be established for a positive feedback system of nonlinear NI systems where the plant is nonlinear NI with integrator and the controller satisfies a astrict notion of the negative imaginary property known as weakly strictly nonlinear NI system property.
The structure of the paper is organized as follows. Section 2 reviews some of the related definitions and results in the NI literature. Then, a characterization of the negative imaginary notion in the nonlinear domain will be given in Section 3. In Section 4, The formulation of the problem of The main result will be given and the stability robustness of a positive feedback system will be established. Section 2 is devoted for further extension of the nonlinear NI framework to the case of free motion and related stability result.
2 Preliminaries
For the sake of completeness, we review in this section some of the main related definitions and results in the NI literature for LTI systems, which will lay the foundation of establishment of the NNI systems-theoretic framework.
2.1 Background for NI LTI Systems
We consider here the following LTI system:
| (2) | ||||
| (3) |
where , , and . The system (2) and (3) has the real-rational proper transfer function . The transfer function matrix is said to be strictly proper if . We will use the notation to denote the state-space realization of the LTI system (2)-(3).
The frequency domain characterization of the NI property to LTI system (2)-(3) is given in the following definition.
Definition 1.
[18]. A square transfer function matrix is called negative imaginary if the following conditions are satisfied:
-
1.
has no pole at the origin and in ;
-
2.
For all such that is not a pole of , ;
-
3.
If , is a pole of , it is at most a simple pole and the residue matrix is positive semidefinite Hermitian.
The LTI system (2) and (3) is said to be negative imaginary if its transfer function is NI. A stronger version of the negative imaginary property is given in the following definition.
Definition 2.
[18]. A square real-rational transfer function matrix is strictly negative imaginary if:
-
1)
has no poles in ;
-
2)
for .
The next lemma is known as the negative imaginary lemma which provides a state-space characterization of LTI NI systems in terms of a linear matrix inequality (LMI).
Lemma 1.
[22]. Let be a minimal state-space realization of the transfer function matrix . Then, is negative imaginary if and only if , and there exist matrices , , and such that the following LMI is satisfied:
| (4) | ||||
Remark 1.
The following lemma provides a state-space characterization of strictly negative imaginary LTI systems.
Lemma 2.
([36]). Let be a minimal state-space realization of the transfer function matrix . Then is strictly negative imaginary if and only if:
-
1)
, ;
-
2)
there exists a matrix , such that
-
3)
the transfer function matrix has full column rank at for any where . That is, rank for all .
The next lemma provides a time-domain condition equivalent to the frequency-domain definition of the NI property for an LTI system of the form (2) and (3).
Lemma 3.
2.2 Relation between PR and NI Systems
An important class of LTI systems of related interest is the class of positive real (PR) systems. The following two lemmas highlight this relation between NI and PR LTI systems in the frequency domain.
Lemma 4.
([36]). Let be a minimal state-space realization of a transfer function where and let . Then is NI if and only if is positive real.
Lemma 5.
([5]). Given a square proper positive real transfer function matrix , then is negative imaginary.
2.3 Internal Stability of LTI NI Feedback System
The stability robustness of positive feedback interconnections of LTI NI systems has been established in [18, 31]. The following lemma will be useful in establishing the Lyapunov-based stability result.
Lemma 6.
One of the main stability results for the positive feedback interconnection of negative imaginary LTI systems is given in the next lemma. Consider a minimal state-space representation for the NI transfer function ,
| (6) | ||||
| (7) |
where . Also, we consider a minimal state-space representation for the SNI transfer function ,
| (8) | ||||
| (9) |
where .
Theorem 1.
The proof of the above theorem has been established in [9] where a Lyapunov based technique has been employed to establish the internal stability of the positive feedback interconnection of and . With and , the function
is considered as Lyapunov function candidate in terms of the trajectories of the feedback subsystems. Rewriting this function we obtain
By Lemma 6, it follows the function is positive-definite and thus is a valid candidate Lyapunov function. The time-derivative of has been shown to be negative semidefinite in [9], and hence the feedback system of and is at least Lyapunov stable. Then, using the assumptions of Theorem 1, all the poles of the closed-loop system matrix has been shown in [9] to lie in the open left-half of the complex plane, which proves the internal stability of the positive feedback interconnection of and .
3 Nonlinear Negative Imaginary Systems
In this section, we will seek to establish a natural generalization of the negative imaginary property of an LTI to general nonlinear systems. In particular, a nonlinear system which is passive from the input to the derivative of the output will be termed as a nonlinear negative imaginary (NNI) system . Also, later in this section, we seek to establish a stability robustness result for NNI feedback systems analogous to the passivity theorem. First of all, we provide examples that motivate the need for a system-theoretic framework that extends classical dissipativity/passivity theory to allow for systems with supply rates involve the derivative of the input and outputs of the system.
3.1 Examples of NNI Systems
Example 1 (Mass-Spring-Damper System).
For mechanical systems, any mass-spring-damper system with non-negative damping coefficients is passive with respect to force inputs and corresponding velocity outputs; i.e., nonlinear negative imaginary from the force input and displacement output. We claim that the system has nonlinear negative imaginary I-O dynamics from to the output . To prove this claim, we consider the following equation for the dynamics of a nonlinear mass-spring-damper system:
| (10) |
where is the mass of the block attached to the spring, is a dynamic state-dependent friction coefficient and the term is the nonlinear spring stiffness such that . In fact, considering the total energy of the system as a storage function, we get
| (11) |
Taking the time derivative of implies
This completes the proof.
Example 2 (Hamiltonian Systems).
A Hamiltonian system which is affine in the input, has negative-imaginary I-O dynamics from the input force to the corresponding coordinate . To establish this claim, consider a Hamiltonian system which satisfies the following equations:
Choosing a storage function as the Hamiltonian of the system and taking the time derivative of yields:
| (12) |
which completes the proof.
This NNI property can also be established for general Euler-Lagrangian systems as in the following example.
Example 3 (Euler-Lagrangian Systems).
Many standard mechanical and physical systems are modeled by Euler-Lagrangian dynamics as follows:
| (13) |
where is a positive-definite symmetric inertia matrix. The term is the Coriolis and centrifugal matrix where , is the gravitational vector, and is the generalized input of the system. The matrix is normally defined using the Christoffel symbols; in which is skew-symmetric [28, 20].
To show that the system (13)is NNI, we consider the following storage function given by
| (14) |
Here, is the potential vector, where , and it is assumed to have an absolute minimum at . It can be easily shown that is positive-definite since is a positive-definite matrix, and is a nonnegative scalar quantity. Then, taking the first time derivative of the function we obtain
which shows that the above Euler-Lagrangian system (13) is passive system from ; i.e., nonlinear negative imaginary from . It is worth noting there is no notion of passivity for the map . In other words, for systems represented by (13), we will be able to prove passivity from the control input to the velocity of the generalized coordinates but not to the position of the generalized coordinates .
3.2 Characterization of NNI Systems
Motivated by the time-domain characterization of the negative imaginary property for LTI systems (Lemma 3), we introduce here a formal definition of the nonlinear negative imaginary property for a general nonlinear system in terms of a dissipativity inequality with an appropriate work rate involving the derivative of the output of the system.
Consider the following general MIMO nonlinear system of the form
| (15) | ||||
| (16) |
where is Lipschitz continuous function such that and is continuously differentiable function such that . We have the following definition.
Definition 3.
The dissipative inequality can be given alternatively by integrating the infinitesimal form (17) from to to get its integral equivalent form; i.e,
| (18) |
for all .
The following lemma gives necessary and sufficient conditions for a nonlinear system of the form (15), (16), affine in the input, to be nonlinear negative imaginary with a storage function, and is deemed analogous to the nonlinear KYP lemma for passive systems [16].
Lemma 7.
(Necessity) From the dissipativity inequality (17), for all and , we get
Rearranging the terms of the above inequality, we obtain
that is; the right-hand side of the above inequality can be factored, for all and , as follows
for some and . By equating coefficients of similar powers of , we get the equations (20).
(Sufficiency) For all and , we have
which concludes the proof.
3.3 Interconnections of NNI Systems
Similar to passive systems, the class of systems with NNI dynamics is closed under parallel and feedback interconnections. This fact can be readily verified if we consider the storage function of the interconnected system as the sum of the storage functions of the subsystems storage functions and ; that is
For example, the parallel interconnection of NNI systems is characterized by , . Then the time derivative of the storage function is evaluated as
Similarly we can show that positive feedback interconnection of two nonlinear NI systems is again a nonlinear NI system. The proof is straightforward recalling the equation , and proceeding as described above.
3.4 Stronger Notions of NNI
We conclude this section by introducing some stronger notions of the NNI property in an analogous way [16] for passive systems. These notions will be employed in the next section for the stability analysis of NNI feedback systems in a similar fashion to that of passive systems.
Definition 4.
Definition 5.
4 Stability of Interconnected Nonlinear Negative Imaginary Systems
We aim in this section to obtain a result on the asymptotic stability of positive feedback interconnections of nonlinear negative imaginary systems. To attain this objective, we seek to establish a nonlinear generalization of the negative imaginary lemma. Then, Lyapunov stability theory and LaSalle’s invariance principle will be employed to establish asymptotic stability.
To this end, we consider the following general MIMO nonlinear systems:
| and | ||||
where is a function with , is continuous and locally Lipschitz in for bounded , and where . We first construct a candidate Lyapunov function for the interconnection of systems and . This interconnected system determines the stability properties of the closed-loop system, see [10].
4.1 Open-Loop System Result
Inspired by the result of Lemma, we shall consider the open-loop interconnection of systems and . We seek to construct a candidate Lyapunov function using a set of technical assumptions on the systems and and on the open-loop interconnection of the systems and as shown in Figure 2. These assumptions are a nonlinear generalization of the assumptions of Lemma.
We have the following assumptions for the systems of and and their the open-loop interconnection.
Assumption 1.
For any constant , there exists a unique solution to the equations
such that implies and the mapping is continuous.
Assumption 2.
For any constant , there exists a unique solution to the equations
such that implies .
Assumption 3.
, for any constant where .
Assumption 4.
Next we state a lemma which establishes a candidate Lyapunov function for the positive feedback interconnection of the systems and . This lemma is a nonlinear analog of Lemma 6.
Lemma 8.
We have . Next, we show that the function for all nonzero . The proof will be established using an iterative technique and the fact that for any constant input each subsystem satisfies
| (24) |
for all . This fact can be readily seen by integrating the following dissipativity inequality
| (25) |
from to . Now fix any , and consider the iteration such that
We have the following two cases:
Case if , then we have
since and are positive-definite.
which implies . Also, according to Assumptions 1 and 2, for each the input guarantees the corresponding quantities and therefore
Now by exploiting inequality (24) we seek to find a lower bound for the function where .
Let and in (24) for the system . Then we obtain
It then follows
Let and in (24) for the system . Then we get
This leads to
From Assumption 3, we consider the following three cases:
and . This implies
since we have .
and . In this case,
. In this case,
| (27) |
Let and in (24) for the system . Then we get
which in turn leads to
Let and in (24) for the system . Then we get
which leads to
Repeating the above process, we obtain
Letting , we conclude that
Therefore, the function is positive-definite for all nonzero . This completes the proof.
Remark 3.
We point out here that we used in this paper a stronger version of the sector bound condition than that used in [10]. This is to ensure the convergence of the iterations used in the proof of the above lemma.
Remark 4.
In the LTI case, the aforementioned Assumptions 1-4 reduce to a lightly stronger version of conditions of Lemma 6. To see this, for the open loop systems as in Figure 2, consider the SISO LTI case where and are two NI systems represented by
where and are the transfer functions for systems and , respectively. We can see that Assumptions 1, 2 hold trivially for linear systems. Also, Assumption 3 amounts to the condition . The sector bound condition (22) reduces to a stronger version of the DC-gain condition (1), which can be seen from the following
4.2 Closed-Loop Stability
In the previous lemma we have constructed a candidate Lyapunov function of the positive feedback interconnection of the systems and . We now introduce a robust stability result for this feedback interconnection as shown in Figure 4. By using Lyapunov stability theory and LaSalle’s invariance principle, we show that the states and asymptotically approach the origin.
To establish this result, we represent the corresponding closed-loop system with the following state-space representation:
| (28) |
where the function is locally Lipschitz and . Now we state the stability result in the following theorem.
Theorem 2.
Consider the positive feedback interconnection of systems and as in Figure 4. Suppose that the system is NNI and zero-state observable, and the system is WS-NNI. Moreover, suppose that Assumptions 1-4 are satisfied. Then, the equilibrium point of the corresponding closed loop system (28) is asymptotically stable.
Consider the function given in (23) as a candidate Lyapunov function for the closed loop system (28). Differentiating with respect to and noting that and , we get
it follows that the closed-loop system (28) is at least Lyapunov stable. Next, we use LaSalle’s invariance principle to prove that the state trajectories of system (28) asymptotically approach to zero; that is, . Since the system is WS-NNI, the system , is globally asymptotically stable (from Definition 5). By using the result of [8], we have which in turn leads to . For trajectories along which , we have
| (29) |
Thus, , since is WS-NNI.
Now, let be an -limit set of a trajectory with . We show that . For any , we write
| (30) |
Since , . The limit set is an invariant set of the system (28). In other words, for all . Then, implies and
| (31) |
Since the system is zero-state observable, we conclude that . Thus, we see and . Hence, by Lemma 4.1 of [17], approaches as . We have , as and hence . It follows from the positive definiteness of that . It is concluded that any bounded trajectory satisfying is the trajectory . Now from the Lasalle invariance principle, any bounded trajectory tends to the origin. Therefore, the origin is asymptotically stable.
5 Illustrative Example: Nonlinear Mass-Spring-Damper System
To illustrate the applicability of the above NNI stability result, we consider the problem of control design for a nonlinear mass-spring-damper system as shown in Figure 5, which has been shown to be NNI. We aim at designing a controller by virtue of Theorem 2 to robustly stabilize the system.
Here, the system is assumed to be nonlinear and obey the force law
| (32) |
where is the displacement of the spring. From Newton’s second law, the system is governed by the equation
| (33) |
Setting and define states , we obtain the following nonlinear state-space representation
| (34) | ||||
| (35) |
Now suppose the system is controlled with the SISO integral resonant controller
| (36) |
where are positive constants. The transfer function is strictly negative imaginary [31]. We first check the assumptions of the open-loop interconnection required by Theorem 2. From the state equation (34), when , we get
| (37) | |||
| (38) |
Using the discriminant method to solve the cubic equation, since we have
| (39) |
and therefore equation (38) has one real solution. Using Cardano’s cubic formula, we get the solution
and from the open-loop interconnection, in Figure 6, we have
thus we obtain
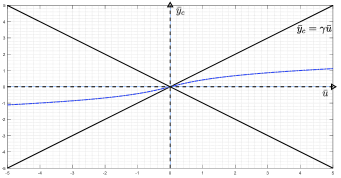
Plotting this function, we can choose a value for the controller parameter such that the sector bound condition
| (40) |
is satisfied for , as shown in Figure 7.
Remark 5.
In recent research work, in view of Theorem 2, a nonlinear negative imaginary approach has been used to design velocity-free controller for the problems quadrotors attitude control [13], quadrotors position control [11], and robotic manipulators control problem [12]. In these papers, the NNI control design approach aims at replacing rate sensors on the quadrotor/manipulator structure with displacement sensors.
6 Nonlinear Negative Imaginary System with Free Motion
In this section, we aim to further generalize the notion of nonlinear negative imaginary to establish the nonlinear analog of negative imaginary systems with free body motion presented in [23] for LTI systems. In [23], the definition and the stability result for LTI systems was extended to the case of NI systems with a pure integrator (i.e. a pole at the origin). Motivated by the results of [23], we seek to extend Definition 3 to establish the conditions under which a nonlinear systems in a cascade connection with an integrator would be nonlinear negative imaginary.
6.1 Nonlinear Negative System with an Integrator
We consider here a SISO nonlinear system which is affine in the input of the form
| (41) |
where , is the scalar control input, and the functions , are continuously differentiable, where , and for all . This system is considered as a cascade connection of an integrator with the nonlinear subsystem as shown in Figure 8.
The idea now is to try to find storage function which will satisfy the dissipation inequality (17) according to Definition 3. That is, we need to ensure that there exists a continuously differentiable storage function which is positive-definite and its time-derivative along trajectories of the system (41) satisfies the following inequality
Now, for all , we obtain
Rearranging the terms of the above inequality, we have, for all , the following inequality
Then we can say, , the function satisfies if and only if the following two conditions are satisfied for all :
| (42) | ||||
| (43) |
Integrating both sides of (42) with respect to , one has
which is a quadratic function in , and the term is a constant of integration which can be freely chosen such that
for all , so we can choose
Now, we find conditions on the functions and for which the conditions (42), (43) are satisfied and ensure at the same time that the function is positive-definite, and hence the system (41) is NNI according to Definition 3. This is made clear in the next theorem.
Theorem 3.
From (44), it can be easily seen that . Now, for we can see that the storage function is a quadratic function in with its discriminant given by:
and from condition , we have which implies that for all . To ensure positive definiteness of the function , we rewrite it in the following way:
and from condition , we can see that for all ; that is, the function is positive-definite.
Next, From (44), differentiating the function with respect to , we get
where
| (45) |
Hence, we get
The quantity is a quadratic function in , and from conditions , , it is negative semi-definite. Therefore, we have
| (46) |
for all , which shows that the system (41) is nonlinear negative imaginary. Then the proof completes.
To illustrate the result of Theorem 3, we consider the following examples.
Example 4.
Consider the following nonlinear system
| (47) |
which has the form of system (41) where
and
We can see that
As a special result of Theorem 3, we can show that a cascade connection of a positive-real system and an integrator will result in NI systems, which in fact comply with the result of Lemma 5. We present the following two examples.
Example 5.
Consider the following LTI system
| (48) |
where , , , and , , are real constants. The subsystem is assumed to be positive real with a transfer function given by
| (49) |
where and . It can be easily verify that the assumptions of Theorem 3 are satisfied. Then, we have the following positive-definite storage function
which has a time-derivative evaluated as
Hence, that the system (48) is nonlinear negative imaginary.
Example 6.
Consider the following positive real system
| (50) |
which has the following state-space representation
| (51) |
This state-space realization can be put in the form of the system (41) where
| (52) |
We can see that,
and
which shows that the Assumption of Theorem 3 are satisfied, and hence the system (50) is shown to be a nonlinear negative imaginary.
6.2 Robust Stability Result
We conclude this section by introducing a stability robustness result a positive feedback interconnection of two NNI systems as shown in Figure 9, where the system is of the form (41) and is given by,
| (53) |
and an input-affine nonlinear system given by,
| (54) |
Here all the functions involved are assumed to be sufficiently smooth to grantees the existence of the solutions. The stability robustness of the feedback interconnection of systems and can be established in a similar way to that of Theorem 2.
In order to state the stability result for the feedback interconnection of and , we represent the interconnection by the following state-space representation:
| (55) |
where is assumed to be locally Lipschitz and .
We have now the following robust stability result.
Theorem 4.
Consider the positive feedback interconnection of the systems and as in Figure 9. Suppose that the system is NNI and zero-state observable, and the system is WS-NNI. Moreover, suppose that the Assumptions 1-4 are satisfied. Then, the equilibrium point of the corresponding closed-loop system (55) is asymptotically stable.
The proof of this theorem follows by a similar argument as in the proof of Theorem 2.
7 Conclusion
In this paper, the notion of the negative imaginary systems has been generalized from the linear case to the nonlinear case. A time-domain definition of nonlinear negative imaginary systems has been introduced as a dissipative system property with an appropriate supply rate. Next, the stability robustness of a positive feedback interconnection where the plant corresponds to a nonlinear negative imaginary system and the controller corresponds to a weak strict negative imaginary system has been established under a set of technical assumptions. A standard mechanical system involving a nonlinear mass-spring-damper system has been considered to illustrate this nonlinear NI stability result. Furthermore, the notion of nonlinear negative imaginary systems has been further extended to include the case of free motion. A cascade connection of a nonlinear system, affine in the input, and integrator has been shown to be nonlinear NI under a set of assumptions. Finally, we introduced a stability result for a positive feedback system where the plant is nonlinear NI with an integrator and the controller is a weakly strictly negative imaginary system.
References
- [1] D. Angeli. Systems with counterclockwise input-output dynamics. IEEE Transactions on Automatic Control, 51(7):1130–1143, 2006.
- [2] B. Bhikkaji and S. Moheimani. Fast scanning using piezoelectric tube nanopositioners: A negative imaginary approach. In Proc. IEEE/ASME Int. Conf. Advanced Intelligent Mechatronics AIM, pages 274–279, Singapore, July 2009.
- [3] B. Bhikkaji, S. O. R. Moheimani, and I. R. Petersen. A negative imaginary approach to modeling and control of a collocated structure. IEEE/ASME Transactions on Mechatronics, 17(4):717–727, 2012.
- [4] B. Brogliato, R. Lozano, B. Maschke, and O. Egeland. Dissipative Systems Analysis and Control. Communications and Control Engineering. Springer, London, UK, 2nd edition, 2007.
- [5] Arturo Buscarino, Luigi Fortuna, and Mattia Frasca. Forward action to make a system negative imaginary. Systems & Control Letters, 94:57–62, 2016.
- [6] C. Cai and G. Hagen. Stability analysis for a string of coupled stable subsystems with negative imaginary frequency response. IEEE Transactions on Automatic Control, 55(8):1958–1963, 2010.
- [7] I. M. Diaz, E. Pereira, and P. Reynolds. Integral resonant control scheme for cancelling human-induced vibrations in light-weight pedestrian structures. Structural Control and Health Monitoring, 19(1):55–69, 2012.
- [8] D Sontag Eduardo. Remarks on stabilization and input-to-state stability. In Proceedings of the IEEE Conference on Decision and Control, volume 2, pages 1376–1378, 1989.
- [9] Ahmed G Ghallab, Mohamed A Mabrok, and Ian R Petersen. Lyapunov-based stability of feedback interconnections of negative imaginary systems. IFAC-PapersOnLine, 50(1):3424–3428, 2017.
- [10] Ahmed G Ghallab, Mohammed A Mabrok, and Ian R Petersen. Extending negative imaginary systems theory to nonlinear systems. In 2018 IEEE Conference on Decision and Control (CDC), pages 2348–2353. IEEE, 2018.
- [11] Ahmed G Ghallab and Ian R Petersen. Quadrotors position control using nonlinear negative imaginary systems approach. To be submitted to Drones Journal.
- [12] Ahmed G Ghallab and Ian R Petersen. Velocity-free control of manipulators using nonlinear negative imaginary approach. To be submitted.
- [13] Ahmed G Ghallab and Ian R Petersen. Velocity-free attitude control of quadrotors: A nonlinear negative imaginary approach. Sensors, 21(7):2387, 2021.
- [14] RB Gorbet and KA Morris. Generalized dissipation in hysteretic systems. In Proceedings of the 37th IEEE Conference on Decision and Control (Cat. No. 98CH36171), volume 4, pages 4133–4138. IEEE, 1998.
- [15] Robert B Gorbet, Kirsten A Morris, and David WL Wang. Passivity-based stability and control of hysteresis in smart actuators. IEEE Transactions on Control Systems Technology, 9(1):5–16, 2001.
- [16] A Isidori, SM Joshi, and AG Kelkar. Asymptotic stability of interconnected passive non-linear systems. International Journal of Robust and Nonlinear Control: IFAC-Affiliated Journal, 9(5):261–273, 1999.
- [17] Hassan K Khalil. Nonlinear systems, 3rd. New Jewsey, Prentice Hall, 9(4.2), 2002.
- [18] A. Lanzon and I. R. Petersen. Stability robustness of a feedback interconnection of systems with negative imaginary frequency response. IEEE Transactions on Automatic Control, 53(4):1042–1046, 2008.
- [19] Alexander Lanzon and Hsueh-Ju Chen. Feedback stability of negative imaginary systems. IEEE Transactions on Automatic Control, 62(11):5620–5633, 2017.
- [20] Frank L Lewis, Darren M Dawson, and Chaouki T Abdallah. Robot manipulator control: theory and practice. CRC Press, 2003.
- [21] M. A. Mabrok, A. G. Kallapur, I. R. Petersen, and A. Lanzon. Enforcing a system model to be negative imaginary via perturbation of hamiltonian matrices. In Proc. 50th IEEE Conf. Decision and Control and European Control Conf. (CDC-ECC), pages 3748–3752, 2011.
- [22] M. A. Mabrok, A. G. Kallapur, I. R. Petersen, and A. Lanzon. Stability analysis for a class of negative imaginary feedback systems including an integrator. In Proc. 8th Asian Control Conf. (ASCC), pages 1481–1486, 2011.
- [23] M. A. Mabrok, A. G. Kallapur, I. R. Petersen, and A. Lanzon. Generalizing negative imaginary systems theory to include free body dynamics: Control of highly resonant structures with free body motion. Automatic Control, IEEE Transactions on, 59(10):2692–2707, Oct 2014.
- [24] MA Mabrok, MA Haggag, and IR Petersen. System identification algorithm for negative imaginary systems. International Journal of Applied and Computational Mathematics, 14(3), 2015.
- [25] Mohamed Mabrok, Abhijit G. Kallapur, Ian R. Petersen, and Alexander Lanzon. A generalized negative imaginary lemma and Riccati-based static state-feedback negative imaginary synthesis. Systems & Control Letters, 77:63 – 68, 2015.
- [26] I. A. Mahmood, S. O. R. Moheimani, and B. Bhikkaji. A new scanning method for fast atomic force microscopy. IEEE Transactions on Nanotechnology, 10(2):203–216, 2011.
- [27] KA Morris and JN Juang. Dissipative controller designs for second-order dynamic systems. IEEE Transactions on Automatic Control, 39(5):1056–1063, 1994.
- [28] Romeo Ortega and Mark W Spong. Adaptive motion control of rigid robots: A tutorial. Automatica, 25(6):877–888, 1989.
- [29] A. K. Padthe, J. H. Oh, and D. S. Bernstein. Counterclockwise dynamics of a rate-independent semilinear Duhem model. In Proceedings of the 44th IEEE Conference on Decision and Control, pages 8000–8005, Seville, Spain, December 2005.
- [30] Thomas Pare, Arash Hassibi, and Jonathan How. A KYP lemma and invariance principle for systems with multiple hysteresis non-linearities. International Journal of Control, 74(11):1140–1157, 2001.
- [31] I. R. Petersen and A. Lanzon. Feedback control of negative imaginary systems. IEEE Control System Magazine, 30(5):54–72, 2010.
- [32] Kanghong Shi, Igor G Vladimirov, and Ian R Petersen. Robust output feedback consensus for networked identical nonlinear negative-imaginary systems. IFAC-PapersOnLine, 54(9):239–244, 2021.
- [33] Abraham Jan van der Schaft and AJ Van Der Schaft. L2-gain and passivity techniques in nonlinear control, volume 2. Springer, London, 2000.
- [34] Jan C Willems. Dissipative dynamical systems Part I: General theory. Archive for rational mechanics and analysis, 45(5):321–351, 1972.
- [35] Jan C Willems. Dissipative dynamical systems Part II: Linear systems with quadratic supply rates. Archive for rational mechanics and analysis, 45(5):352–393, 1972.
- [36] J. Xiong, I. R. Petersen, and A. Lanzon. A negative imaginary lemma and the stability of interconnections of linear negative imaginary systems. IEEE Transactions on Automatic Control, 55(10):2342–2347, 2010.
Appendix A Appendix
We show for an LTI system of the form (2)-(3), the WS-NNI property reduces to the SNI property of the system. This can be readily seen by considering a storage function , where is the state vector of the system and the matrix is a positive-definite symmetric matrix which satisfies the LMI (4). Differentiating the function with respect to the time , one has
where is the output of the auxiliary system
| (56) | ||||
| (57) |
whose transfer function is
We have where according to Lemma 2, the matrix has no zeros on the imaginary axis except possibly at the origin. Whenever , then , and thus can only either exponentially diverge or exponentially converge to zero. However, if diverges, it follows from that should also diverge which is a contradiction. It then follows that should converge to zero, which proves that the LTI system (2)-(3) is WS-NNI according to Definition 5.
Appendix B Acknowledgment
The authors would like to thank Kanghong Shi, Australian National University, for helpful discussions and suggestions in the context of Ghallab et al. (2018).