More than one Author with different Affiliations
SiENet: Siamese Expansion Network for Image Extrapolation
Abstract
Different from image inpainting, image outpainting has relatively less context in the image center to capture and more content at the image border to predict. Therefore, classical encoder-decoder pipeline of existing methods may not predict the outstretched unknown content perfectly. In this paper, a novel two-stage siamese adversarial model for image extrapolation, named Siamese Expansion Network (SiENet) is proposed. Specifically, in two stages, a novel border sensitive convolution named adaptive filling convolution is designed for allowing encoder to predict the unknown content, alleviating the burden of decoder. Besides, to introduce prior knowledge to network and reinforce the inferring ability of encoder, siamese adversarial mechanism is designed to enable our network to model the distribution of covered long range feature as that of uncovered image feature. The results on four datasets has demonstrated that our method outperforms existing state-of-the-arts and could produce realistic results. Our code is released on https://github.com/nanjingxiaobawang/SieNet-Image-extrapolation.
Index Terms:
Two-stage GAN; Adaptive filling convolution; Siamese adversarial mechanism; Image outpainting.I Introduction
Image extrapolation, as illustrated in Fig. 1, is to generate new contents beyond the original boundaries of a given image. Even belonging to the general image painting task as inpainting [1, 2, 4, 3, 5, 6] , image outpainting [7] has its special characteristics. We rethink this task from two aspects. First, comparing to inpainting, image extrapolation would rely on relative less context to infer much larger unknown content. Besides, the inferred content locates outside the given image. Therefore, existing expertise of inpainting can not be applied into this task directly. Second, existing methods of image extrapolation generally employ classical encoder-decoder (ED) structure. This structure forces the encoder to capture the global and local features and allows decoder to recover them to desired resolution. Namely, all the burden of inferring is put on the decoder. Yet, the input of outpainting doesn’t have such abundant features, which makes the capturing ability of encoder weak and the inferring burden of decoder heavy.

Due to the requirement of outpainting task, most inpainting expertise can’t be applied to it directly. [8] proposed the specific spatial expansion module and boundary reasoning module for the requirement of connecting marginal unknown content and inner context. Besides, heavy burden of prediction on decoder may result in the poor performance of generating realistic images. [9] applied DCGAN [10] which mainly focuses on the prediction ability of decoder. This kind of methods could predict the missing parts on both sides of the image, while this design would ignore coherence of semantic and content information.

In this paper, to design task-specific structure, we propose a novel two-stage siamese adversarial model for image extrapolation, named Siamese Expansion Network (SiENet). In our SiENet, a boundary-sensitive convolution, named adaptive filling convolution, is proposed to automatically infer the features of surrounding pixels outside known content with balance of smoothness and characteristic. This adaptive filling convolution is inserted to the encoder of two-stage network, activating the sensitivity of encoder for border features. Therefore, encoder could infer the unknown content and the inferring burden of decoder could be alleviated.
In addition, the siamese adversarial mechanism is designed to introduce prior knowledge into network and adjust the inferring burden of each part. In the joint training of two stages, ground truth and covered image are fed into network to calculate the siamese loss. Siamese loss encourages the features of them in the subspace to be similar, leading to reinforced predicting ability of long range encoder. Besides, a adversarial discriminator is designed in each stage to push the global generator to generate realistic prediction. Thus, the whole inferring burden of the network is reasonably allocated.
Our contributions can be summarized as follows:
-
•
We design a novel two-stage siamese adversarial network for image extrapolation. Our SiENet, a task-specific pipeline, could regulate the inferring burden of each part and introduce prior knowledge into network legitimately.
-
•
We propose an adaptive filling convolution to concentrate on inferring pixels in unknown area. By inserting this convolution into encoder, encoder could be endowed powerful inferring ability.
-
•
Our method achieves promising performance on four datasets and outperforms existing state-of-the-arts. The results on four datasets, i.e., Cityscapes, paris street-view, beach and Scenery, including street and nature cases, indicate the robustness of our method.
II Methodology
Our SiENet is a two-stage network, and each stage has specific generator and discriminator, as shown in Fig. 2 (a). The details of our method are provided as follows.
II-A Framework Design
Given an input image , extension filling map and smooth structure [11], our method intends to generate a visually convincing image where is desired width of the generated image. SieNet follows the coarse-to-fine two-stage pipeline [12]. As shown in Fig. 2 (a), an uncovered smooth structure is produced by the structure generator first. Then the generated structure feature would combine with image and filling map , acting as the input of second generator, i.e., content generator, to generate outstretched image . Besides, the discriminator to ensure the output of generator and actual data conform to a certain distribution.
As illustrated in Fig. 2 (b), the encoder of structure generator downsamples the input with 8 scale. Then to capture multi-scale information two residual blocks are designed to further proceed the output of encoder. Finally, by three nearest-neighbor interpolation, the output of residual blocks is upsampled to desired resolution. The detailed structure of content generator is similar to that of structure generator, except adding two residual blocks before last two upsampling operations. The discriminator follows the structure and protocol of that of BicycleGAN [13, 14] .

II-B Adaptive Filling Convolution
To endue encoder with predicting ability, we propose a boundary sensitive convolution, i.e., adaptive filling convolution. Given a convolutional kernel with sampling locations (e.g., in a convolution), let and denote the weight of padding convolution and mask modulation for -th position. and represent the feature map at location from input and output respectively. Therefore, the filling convolution could be formulated as follows:
| (1) |
In practical learning , the scheme of our filling convolution is shown as Fig. 3. Two separate convolutions model padding weight and mask modulation respectively where is defaulted to 1. Our filling convolution could predict the pixel outside the image boundary. When kernel center locates just outside known content, only scant real pixels would join the patch calculation. Our padding convolution would predict it by known information with , and another skip connection from input to output would keep characteristic value to avoid high variance. Besides, mask modulation works as a adaptive balance factor of these two branches, to guarantee the smoothness and characteristic of prediction. We insert a filling convolution into the bottleneck of encoder, therefore, encoder could possess the ability of capturing context and the ability of predicting unknown content.
II-C Siamese Adversarial Mechanism
Classical adversarial mechanism could constrain the whole generator toward the real case. However, this constraint is implicit to each part of generator. Especially in two-stage GAN [15, 16, 17] for image outpainting, long range encoding may lead to insufficient inferring ability for decoder. Considering the predicting ability of encoder brought by filling convolution, we further add explicit constraint in encoder to push the features of covered and uncovered image to be common. Namely, prior knowledge of uncovered image is learned by encoder. In addition, we also take advantages of adversarial mechanism in our model to constrain the generated results to be consistent with ground truth [18, 19]. Through these two thoughtful constraints brought by our siamese adversarial mechanism, the predicting burden is well regulated.
Let denotes structure generator and denotes encoder of content generator, is the input of the whole network. The output of long range encoder could be formulated as:
| (2) |
Therefore, let superscripts and gt denote whom is generated by covered input and ground truth input respectively, the siamese loss is loss of and :
| (3) |
In order to generate realistic results, we introduce adversarial loss in the structure generator:
| (4) |
II-D Loss Function
We introduce loss to predict the distance between the structures and :
| (5) |
Besides, the perceptual loss and the style loss [20] are applied into our network. is defined as:
| (6) |
is the activation map of the -th layer of the pre-trained network. In our work, is activation map from the layers of relu1-1, relu2-1, relu3-1, relu4-1 and relu5-1 of the ImageNet pre-trained VGG-19. These activation maps are also used to calculate the style loss to measure the covariance between the activation maps. Given a feature map size Cj Hj Wj, the style loss is calculated as follows.
| (7) |
is the the reconstructed Gram metric based on activation map . Totally, the overall loss is:
| (8) |
where , , , and are set 5, 1, 0.1, 250 and 1 respectively.
III Experiments
III-A Implementation Details and Configurations
Our method is flexible for two-direction and single-direction outpainting. For two-direction outpainting, our method is evaluated on three datasets, i.e., Cityscapes [21], paris street-view [2] and beach [9]. Single-direction evaluation is made on Scenery dataset [22]. Besides, we take structural similarity (SSIM), peak signal-to-noise ratio (PSNR) as our evaluation metrics.
In training and inference, the images are resized to . We train our model using Adam optimizer [23] with learning rate , beta1 and beta2 . The batch size is set to 8 for paris-street view and beach, 2 for Cityscapes, and 16 for Scenery. The total iteration of joint training is for four datasets.
| FConv | SAM | SSIM | PSNR |
|---|---|---|---|
| 0.6896 | 23.2539 | ||
| 0.7254 | 23.5987 | ||
| 0.7647 | 24.4578 | ||
| 0.7832 | 24.8213 |
III-B Ablation Study on SiENet
| SSIM | PSNR | |||||||
| Beach | Paris | Cityscapes | Scenery | Beach | Paris | Cityscapes | Scenery | |
| Image-Outpainting | 0.3385 | 0.6312 | 0.7135 | - | 14.6256 | 19.7400 | 23.0321 | - |
| Outpainting-srn | 0.5137 | 0.6401 | 0.7764 | - | 18.2211 | 19.2734 | 23.5927 | - |
| Edge-Connect | 0.6373 | 0.6342 | 0.7454 | - | 19.8372 | 22.1736 | 24.1413 | - |
| NS-Outpainting | - | - | - | 0.6763 | - | - | - | 17.0267 |
| Our method | ||||||||

III-C Comparisons

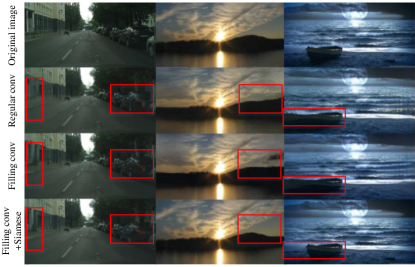
To validate the effectiveness of filling convolution and siamese adversarial mechanism in our network, We make the ablation experiment in Tab. I. Only using filling convolution or siamese adversarial mechanism could get a significant improvement over classical encoder-decoder. And the combination of them could achieve the best performance, indicating the regulation of predicting burden is beneficial for the task. We also visualize the results of street and nature scenery to measure the quantitative capability of them. As shown in Fig. 4, the combination of these proposed two parts could recover the details and generate realistic results in easy nature and complicated street cases.
Our method is compared with existing methods including Image-Outpainting [9], Outpainting-srn [8], Edge-connect [24] and NS-outpainting [22]. As shown in Tab. II, for two-direction outpainting, our method outperforms Image-Outpainting [9], Outpainting-srn [8], Edge-connect [24], and achieves state-of-the-art performance in three datasets. For single-direction, the great margin of performance between our method and NS-outpainting [22] indicates the superiority and generality of our SiENet. Besides, we also provide visual comparison of various methods in Fig. 5 and visual performance of our method on four datasets in Fig 6. Notably, the images generated by our method are similar to the ground truth than that of existing methods.
IV Conclusion
A novel end-to-end model named Siamese Expansion Network for Image Extrapolation is propoesd in this paper. To regulate the heavy predicting burden of decoder legitimately, we first propose adaptive filling convolution to endow encoder with predicting ability. Then we introduce siamese adversarial mechanism in long range encoder to allow encoder to learn prior knowledge of real image and reinforce the inferring ability of encoder. Our method has achieved promising performance on four datasets and outperforms existing state-of-the-arts.
Acknowledgement
The work described in this paper was fully supported by the National Natural Science Foundation of China project (61871445) and Nanjing University of Posts and Telecommunications General School Project (NY22057).
References
- [1] Barnes C, Shechtman E, Finkelstein A, et al. PatchMatch: A randomized correspondence algorithm for structural image editing[J]. ACM Transactions on Graphics, 2009, 28(3): 24.
- [2] Pathak D, Krahenbuhl P, Donahue J, et al. Context encoders: Feature learning by inpainting[C]//Proceedings of the IEEE conference on Computer Vision and Pattern Recognition. 2016: 2536-2544.
- [3] Yu J, Lin Z, Yang J, et al. Generative image inpainting with contextual attention[C]//Proceedings of the IEEE conference on Computer Vision and Pattern Recognition. 2018: 5505-5514.
- [4] Yang C, Lu X, Lin Z, et al. High-resolution image inpainting using multi-scale neural patch synthesis[C]//Proceedings of the IEEE conference on Computer Vision and Pattern Recognition. 2017: 6721-6729.
- [5] Cho J H, Song W, Choi H, et al. Hole filling method for depth image based rendering based on boundary decision[J]. IEEE Signal Processing Letters, 2017, 24(3): 329-333.
- [6] Sulam J, Elad M. Large inpainting of face images with trainlets[J]. IEEE Signal Processing Letters, 2016, 23(12): 1839-1843.
- [7] Ledig C, Theis L, Husz r F, et al. Photo-realistic single image super-resolution using a generative adversarial network[C]//Proceedings of the IEEE conference on Computer Vision and Pattern Recognition. 2017: 4681-4690.
- [8] Wang Y, Tao X, Shen X, et al. Wide-context semantic image extrapolation[C]//Proceedings of the IEEE conference on Computer Vision and Pattern Recognition. 2019: 1399-1408.
- [9] Sabini M, Rusak G. Painting outside the box: Image outpainting with gans[J]. arXiv preprint arXiv:1808.08483, 2018.
- [10] Radford A, Metz L, Chintala S. Unsupervised representation learning with deep convolutional generative adversarial networks[J]. arXiv preprint arXiv:1511.06434, 2015.
- [11] Xu L, Yan Q, Xia Y, et al. Structure extraction from texture via relative total variation[J]. ACM Transactions on Graphics, 2012, 31(6): 1-10.
- [12] Ren Y, Yu X, Zhang R, et al. StructureFlow: Image inpainting via structure-aware appearance flow[C]//Proceedings of the IEEE International conference on Computer Vision. 2019: 181-190.
- [13] Zhu J Y, Zhang R, Pathak D, et al. Toward multimodal image-to-image translation[C]//Advances in Neural Information Processing Systems. 2017: 465-476.
- [14] Iizuka S, Simo-Serra E, Ishikawa H. Globally and locally consistent image completion[J]. ACM Transactions on Graphics, 2017, 36(4): 1-14.
- [15] Goodfellow, Ian, et al. ”Generative adversarial nets.” Advances in Neural Information Processing Systems. 2014: 2672-2680.
- [16] Arjovsky, Martin, Soumith Chintala, and Lon Bottou. ”Wasserstein gan.” arXiv preprint arXiv:1701.07875, 2017.
- [17] Gulrajani, Ishaan, et al. ”Improved training of wasserstein gans.” Advances in Neural Information Processing Systems. 2017: 5767-5777.
- [18] Norouzi M, Fleet D J, Salakhutdinov R R. Hamming distance metric learning[C]//Advances in Neural Information Processing Systems. 2012: 1061-1069.
- [19] Melekhov I, Kannala J, Rahtu E. Siamese network features for image matching[C]//2016 23rd International Conference on Pattern Recognition. 2016: 378-383.
- [20] Gatys L A, Ecker A S, Bethge M. Image style transfer using convolutional neural networks[C]//Proceedings of the IEEE conference on Computer Vision and Pattern Recognition. 2016: 2414-2423.
- [21] Cordts M, Omran M, Ramos S, et al. The cityscapes dataset for semantic urban scene understanding[C]//Proceedings of the IEEE conference on Computer Vision and Pattern Recognition. 2016: 3213-3223.
- [22] Yang Z, Dong J, Liu P, et al. Very Long Natural Scenery Image Prediction by Outpainting[C]//Proceedings of the IEEE International Conference on Computer Cision. 2019: 10561-10570.
- [23] Kingma D P, Ba J. Adam: A method for stochastic optimization[J]. arXiv preprint arXiv:1412.6980, 2014.
- [24] Nazeri K, Ng E, Joseph T, et al. Edgeconnect: Generative image inpainting with adversarial edge learning. arXiv 2019[J]. arXiv preprint arXiv:1901.00212.