Minorization-based Low-Complexity Design for IRS-Aided ISAC Systems
Abstract
A low-complexity design is proposed for an integrated sensing and communication (ISAC) system aided by an intelligent reflecting surface (IRS). The radar precoder and IRS parameter are computed alternatingly to maximize the weighted sum signal-to-noise ratio (SNR) at the radar and communication receivers. The IRS design problem has an objective function of fourth order in the IRS parameter matrix, and is subject to highly non-convex unit modulus constraints. To address this challenging problem and obtain a low-complexity solution, we employ a minorization technique twice; the original fourth order objective is first surrogated with a quadratic one via minorization, and is then minorized again to a linear one. This leads to a closed form solution for the IRS parameter in each iteration, thus reducing the IRS design complexity. Numerical results are presented to show the effectiveness of the proposed method.
Index Terms:
ISAC, IRS, alternating optimization, minorizationI INTRODUCTION
Integrated sensing and communication (ISAC) is deemed a key technology for efficiently utilizing the wireless resources [1, 2, 3, 4]. By incorporating the sensing and communication functionalities into the same hardware platform, and reusing the waveform, ISAC systems achieve savings in device cost, weight and used power, as compared to having two independent coexisting devices, one for sensing and one for communication. They also avoid interference between the sensing and communication functions [5, 6, 7].
Intelligent reflecting surfaces (IRS) are structures consisting of a large number of configurable printed dipoles. Each dipole can be configured to change the incoming electromagnetic wave by a controllable amount. These elements can collaboratively alter the direction of the incoming signal, for example, they can form a narrow beam to the desired destination, or avoid interference, thus improving the communication system performance [8]. IRS can achieve beamforming gains without the need of radio frequency (RF) chains, thus offering energy efficiency and reduced hardware deployment cost [9]. Multiple-input multiple-output (MIMO) radar assisted by IRS have been studied in [10], where IRS create additional wireless links for the target echoes to reach the radar receiver, thus improving the signal-to-noise ratio (SNR) at receiver and the target detection performance.
Challenges: The main design challenge of IRS-aided wireless systems lies in the IRS parameter design, i.e., the diagonal matrix that contains the IRS parameters. Each element of the parameter matrix should have unit modulus, since each element only contributes a phase shift. This highly non-convex unit modulus constraint (UMC) on the IRS parameter matrix makes the system designs challenging. For IRS aided communication system design, the objective and constraints of the optimization problem are normally quadratic into the IRS parameter matrix. The quadratic program problem with UMC has been comprehensively investigated in IRS-aided communication works [8, 9]. However, for the IRS-aided ISAC system, the objective and constraints can be fourth order functions in the IRS parameter matrix, since the transmitted waveform can be reflected twice by the IRS before it arrives at the radar receiver. This type of problem is more challenging than the traditional quadratic programs with UMC. The radar precoder design is quadratic program without UMC, and has been well investigated in the ISAC literature [11].
Recent Works: In existing IRS ISAC literature, the radar precoder and IRS parameter are alternatingly optimized. IRS parameter design methods can be classified into two classes. The first is based on minorization or majorization method [12], to convert the fourth order functions into quadratic ones, so that the problem is transformed into quadratic problems that are easier to tackle [13, 14, 15, 16]. The second class is based on the Riemannian gradient ascent/descent technique [17].
Motivation: In practical deployment, IRS with a large number of elements are required in order to achieve powerful links and improve the system performance [18]. However, in this case, the dimensionality of the IRS design problem with quartic objective and/or constraints is high, and obtaining its solution is a very challenging task. The first type of the aforementioned methods work well when the dimension of the IRS parameter matrix variable () is small. In that case, interior point methods (IPM) with complexity of are used to solve the surrogate quadratic problem. However, when grows large, the time needed by IPM to solve the quadratic problem becomes unacceptably high. Moreover, for some cases, Gaussian randomization is necessary to re-construct the solution from its covariance [13]. Huge number of realizations of randomized solution are required to obtain a good enough solution for large . The second class of techniques require a step-by-step search for the solution on the complex manifold in the current Riemannian gradient direction. They take several iterations to converge even though each iteration needs only low-complexity matrix multiplications and additions [17].
Contribution: In this paper, we study an IRS-assisted ISAC system tracking a non-line-of-sight (NLOS) target, while communicating with multiple receivers. A low-complexity system design is proposed to maximize the weighted sum SNR at the radar and communication receivers. The radar precoder and IRS parameters are optimized alternatingly; the precoder optimization problem is addressed based on semidefinite relaxation (SDR) [19], and the IRS optimization problem is based on minorization [12]. To bypass the quadratic program which uses IPM in the IRS parameter design [13, 14, 15, 16], we apply the minorization operation twice, i.e., the quartic function of IRS parameter is first degraded into a quadratic one via minorization, which is again minorized to a linear one. For the IRS parameter design problem with a linear surrogate objective function and UMC constraints, a closed-form solution can be obtained. Therefore, the IRS parameters can be designed using low-complexity matrix multiplications and additions without the need for the IPM or CVX toolbox [20]. Numerical results demonstrate the usefulness and fast convergence of our proposed double minorization technique for the IRS design.
Notation: , denote respectively Hermitian and conjugate of matrix ; and denote respectively mean and variance; denotes the trace of square matrix ; represents the vectorization of matrix ; , and respectively denote an matrix with all zero elements, an vector with all one elements, and an identity matrix; and denote respectively Kronecker and Hadamard product; denotes the probability density of an circularly symmetric complex Gaussian vector with zero mean and covariance matrix ; denotes a diagonal matrix whose diagonal elements are those of a vector ; denotes a column vector whose elements are the diagonal elements of a matrix ; and respectively denote the real part and argument of a complex number .
II SYSTEM MODEL
We consider an ISAC system aided by an IRS platform, as shown in Fig. 1. The radar transmitter and receiver are collocated, and are respectively modeled as uniform linear arrays (ULAs) with and antennas, spaced apart by . The radar is tracking a point target, and at the same time transmits data to communication receivers, each equipped with a single antenna. Both sensing and communication tasks are achieved with the transmit waveform. The IRS is modeled as a uniform planar array (UPA) with elements per row and elements per column. The total number of IRS elements is . The line-of-sight between the radar and the target is considered unavailable. All channels are assumed flat fading and perfectly known. The signal transmitted by the MIMO radar is
| (1) |
where is the radar precoder matrix, with denoting the -th column of , and is the signal for the communication receivers, which is also used for target tracking. The emitted signal is first reflected by the IRS, then by the target, then again by the IRS, and is finally received by the radar receiver as
| (2) |
where is the complex channel coefficient of the radar-IRS-target-IRS-radar path; is the normalized channel between the radar and the IRS, is the parameter matrix of the IRS, where is the phase shift of the -th IRS element for where ; is the IRS steering vector, where , and is defined similarly with ; and are respectively the azimuth and elevation angles of the target relative to the IRS; is the additive white Gaussian noise (AWGN) at the radar receiver, where is the noise power at each radar receive antenna.
The communication receivers receive the radar signal through a direct and an IRS-reflected path as
| (3) |
where is the channel from the radar to the communication receivers; is the channel from the IRS to the communication receivers; models the AWGN at the communication receivers, where is the noise power in each communication receiver.
The output SNRs at radar and communication receivers are
| (4) | |||
| (5) |
III SYSTEM DESIGN
We aim to maximize a weighted sum of the radar SNR and communication SNR with respect to the and , subject to certain constraints, i.e.,
| (6a) | |||||
| (6d) | |||||
where is a weight factor; (6d) constrains the radar transmit power to be ; (6d) constrains the radar beam pattern deviation from a desired one to be smaller than , where is the desired waveform’s covariance matrix; (6d) imposes UMC to the IRS parameters.
The optimization problem (6) is non-convex due to the coupling of and . Alternating optimization [21] can efficiently solve the problem by dividing it into two sub-problems. The first sub-problem is solving for while fixing , and the second one is solving for while fixing . The two sub-problems are alternatingly solved until convergence is reached.
III-A SUB-PROBLEM 1: Fix and optimize with respect to
The objective equals where . Then the first sub-problem is re-written as
| (7a) | |||||
| (7c) | |||||
On expressing
| (8) |
where and , sub-problem 1 becomes
| (9a) | |||||
| (9c) | |||||
The in problem (9) can be solved by the CVX toolbox [20]. Afterwards, the ’s can be re-constructed using Gaussian randomization technique noting . We generate randomized vectors following the covariance of , the one that satisfies the constraints and maximizes the objective is chosen as [19]. Then is acquired via concatenating the column vectors ’s.
III-B SUB-PROBLEM 2: Fix and optimize with respect to
We use the value of found in sub-problem 1 in the second sub-problem, and solve for . By substituting and in the objective function, can be written as
| (10) |
where is irrelevant to , and , , and are respectively linear, quadratic and quartic into as
| (11a) | |||
| (11b) | |||
| (11c) | |||
| (11d) | |||
where . The term can be dropped, and the problem can be rewritten as
| (12a) | |||||
| (12b) | |||||
The highly non-convex UMC of (12b) and the quartic term in the objective function (12a) are the two main challenges in solving (). To convert into a solvable form, we could locally approximate/minorize with a second order function of , which could afterwards be solved by the existing optimization techniques, for instance SDR [13]. However, solving the semidefinite programming (SDP) brought by SDR, for the covariance matrix of , would require expensive computation when is large. In addition, Gaussian randomization would be necessary to reconstruct from its covariance, and that would involve high complexity when is large [13]. To bypass the complexity of SDR technique, in our work, the minorized second order function is minorized again, with a linear function of . With this method, we can obtain a closed-form solution for .
First let us define and . We can write
| (13) |
where in step (a), is invoked, , and .
In each iteration, is minorized by [12]
| (14) |
where is the solved value of in the previous/-th iteration [12], and the current iteration index is . The third term on the right hand side of (14) is not related to the variable , therefore is disregarded.
The first term can be re-written as
| (15) |
where is referred in step (a), , is invoked in step (b), and .
Likewise, is re-written as , where . Thus, we have a surrogate function for the term as
| (16) |
where , and .
In addition, the quadratic term is re-written as a function of as
| (17) |
where .
Similarly, is written as
| (18) |
where , and .
Thereby, is transformed as
| (19a) | |||||
| (19b) | |||||
where is the -th element of the column vector .
On noting that is quadratic into , can be treated as a quadratic program, and thus can be solved with interior point methods [13, 14]. To mitigate the complexity, the surrogate objective function is minorized [12] again to make it linear in , i.e.,
| (20) |
where
| (21a) | |||
| (21b) | |||
where is the solved value of in previous/-th iteration. Thus, turns into
| (22a) | |||||
| (22b) | |||||
The solution of in the -th iteration is
| (23) |
We refer readers to [22] for the monotonicity of the objective brought by the aforementioned power method-like iteration in Eq. (23), and [23] for the proof of convergence of minorization technique. The alternating optimization algorithm for solving the radar precoder matrix and IRS parameter matrix is summarized as Algorithm 1. in Algorithm 1 is an error tolerance indicator, is the iteration index, and is the value of the objective function in -th iteration.
IV NUMERICAL RESULTS
| Parameter | Value |
|---|---|
| Algorithm error tolerance [dB] | |
| Maximum allowed number of iterations | 20 |
| Number of communication receivers | 5 |
| Rician factor of channel , [dB] | 0 |
| radar receiver noise power [dBm] | |
| communication receiver noise power [dBm] | |
| Radar transmitter/receiver inter-antenna space | |
| Radar beampattern disimilarity threshold [dB] |
This section provides numerical results to demonstrate the convergence of the proposed optimization algorithm and its advantage over the works of [13, 17]. In the simulation, the channels are simulated according to the Rician fading model. For channel and , the NLOS component is more dominating, as in [13].
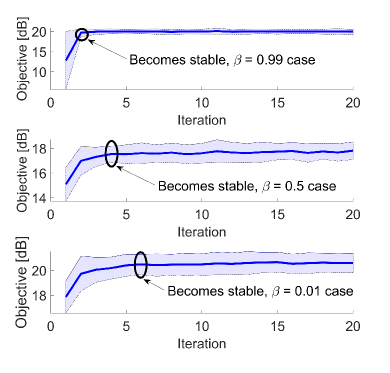
Convergence: Fig. 2 displays the convergence of the objective function/weighted SNR for different values of the weight of the radar SNR (). The solid lines are the mean of objective of realizations, and the shaded areas around the mean show the variance of the different realizations. It is shown that the objective increases faster with larger . Note that the radar SNR is quartic in , and the communication SNR is quadratic in , so the former is more sensitive to the change of . Larger , which means assigning the radar SNR more priority, will result in quicker increase of the weighted sum SNR/objective function. To well balance the radar and communication metrics, should be chosen such that and are on the same scale.
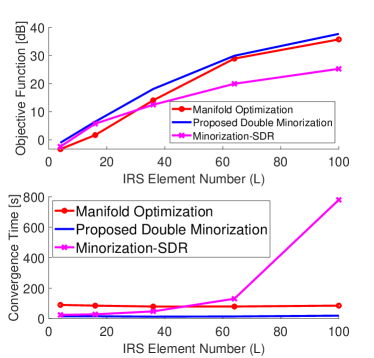
Comparisons with previous works: In Fig. 3, our proposed double minorization method is compared with minorization-SDR [13] and manifold optimization [17] when the number of IRS elements () changes. In [13], the quartic objective function is first surrogated with a quadratic one, then solved with SDR to obtain the covariance matrix of the IRS parameter. The IRS parameter is re-constructed from the covariance via Gaussian randomization. In [17], manifold optimization is proposed for the fourth order objective via Riemannian gradient ascent. Per the first subplot of Fig. 3, our proposed method outperforms [13] and [17], and the objective of weighted SNR is boosted by increasing .
In the second subplot of Fig. 3, the average convergence time of the three aforementioned optimization techniques are compared when varies. The convergence time of our method and that of [17] increases negligibly with , since both methods are using closed-form solutions, requiring only matrix multiplications and additions. Our technique takes fewer iterations to converge as compared to [17]. Minorization-SDR [13] also needs only a small number of iterations to converge. However, [13] needs to solve SDP with IPM in each iteration, with complexity of . Thus, the convergence time of [13] is not scaling well with , as compared to our paper and that of [17].
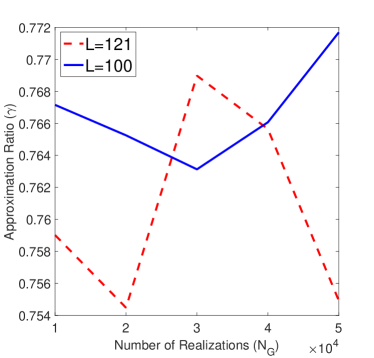
Remarks: The performance loss of [13] is obvious when is large. This comes from the Gaussian randomization operation, which computes the IRS parameter from its covariance. For the sake of simplicity and without loss of generality, we denote the optimal objective value of the SDP in the first step as , where is the optimal solution of which maximizes , and is the covariance matrix of . We realize with samples, and choose the one that maximizes , and we denote this solution as . The approximation ratio is statistically increasing with the growth of [19]. However, as Fig. 4 shows, in large region, the ratio increases negligibly by increasing for large . It is observed that, for [13], to obtain a high quality solution, we need to realize a large number of randomized solutions when is large.
V CONCLUSIONS
An alternating optimization based low-complexity design has been proposed for an IRS-aided ISAC system, for maximizing the weighted sum SNR at the radar and communication receivers. The challenging IRS parameter design problem, with fourth order objective and UMC on the IRS parameter, is solved by applying our proposed double minorization technique. The complexity of system design is alleviated since only matrix multiplication and addition operations are necessary for obtaining the solution of IRS parameter. Therefore, this method works fast even when the IRS size grows large. The fast convergence and usefulness of our proposed method have been shown in the numerical results.
References
- [1] A. Zhang, F. Liu, C. Masouros, R. W. Heath Jr. , Z. Feng, L. Zheng, and A. Petropulu, “An overview of signal processing techniques for joint communication and radar sensing,” accepted in IEEE Journal on Spetial Topics in Signal Processing (see also arXiv:2102.12780), 2021.
- [2] A. Hassanien, M. G. Amin, E. Aboutanios, and B. Himed, “Dual-function radar communication systems: A solution to the spectrum congestion problem,” IEEE Signal Processing Magazine, vol. 36, no. 5, pp. 115–126, sep 2019.
- [3] J. A. Zhang, M. L. Rahman, X. Huang, Y. J. Guo, S. Chen, and R. W. Heath, “Perceptive mobile network: Cellular networks with radio vision via joint communication and radar sensing,” IEEE Vehicular Technology Magazine, pp. 1–11, 2020.
- [4] F. Liu, L. Zheng, Y. Cui, C. Masouros, A. P. Petropulu, H. Griffiths, and Y. C. Eldar, “Seventy years of radar and communications: The road from separation to integration,” arXiv:2210.00446, 2022.
- [5] Z. Wei, F. Liu, C. Masouros, N. Su, and A. P. Petropulu, “Toward multi-functional 6G wireless networks: Integrating sensing, communication, and security,” IEEE Commun. Mag., vol. 60, no. 4, pp. 65–71, 2022.
- [6] F. Liu, C. Masouros, A. P. Petropulu, H. Griffiths, and L. Hanzo, “Joint radar and communication design: Applications, state-of-the-art, and the road ahead,” IEEE Transactions on Communications, vol. 68, no. 6, pp. 3834–3862, 2020.
- [7] D. Ma, N. Shlezinger, T. Huang, Y. Liu, and Y. C. Eldar, “Joint radar-communication strategies for autonomous vehicles: Combining two key automotive technologies,” IEEE Signal Processing Magazine, vol. 37, no. 4, pp. 85–97, 2020.
- [8] Q. Wu and R. Zhang, “Intelligent reflecting surface enhanced wireless network via joint active and passive beamforming,” IEEE Transactions on Wireless Communications, vol. 18, no. 11, pp. 5394–5409, 2019.
- [9] C. Huang, A. Zappone, G. C. Alexandropoulos, M. Debbah, and C. Yuen, “Reconfigurable intelligent surfaces for energy efficiency in wireless communication,” IEEE Trans. Wireless Commun., vol. 18, no. 8, pp. 4157–4170, 2019.
- [10] S. Buzzi, E. Grossi, M. Lops, and L. Venturino, “Foundations of MIMO radar detection aided by reconfigurable intelligent surfaces,” IEEE Trans. Signal Process., vol. 70, pp. 1749–1763, 2022.
- [11] F. Liu, L. Zhou, C. Masouros, A. Li, W. Luo, and A. Petropulu, “Toward dual-functional radar-communication systems: Optimal waveform design,” IEEE Trans. Signal Process., vol. 66, no. 16, pp. 4264–4279, 2018.
- [12] Y. Sun, P. Babu, and D. P. Palomar, “Majorization-minimization algorithms in signal processing, communications, and machine learning,” IEEE Trans. Signal Process., vol. 65, no. 3, pp. 794–816, 2017.
- [13] Z.-M. Jiang, M. Rihan, P. Zhang, L. Huang, Q. Deng, J. Zhang, and E. M. Mohamed, “Intelligent reflecting surface aided dual-function radar and communication system,” IEEE Syst. J., pp. 1–12, 2021.
- [14] R. Liu, M. Li, Y. Liu, Q. Wu, and Q. Liu, “Joint transmit waveform and passive beamforming design for RIS-aided DFRC systems,” IEEE J. Sel. Topics Signal Process., vol. 16, no. 5, pp. 995–1010, 2022.
- [15] H. Luo, R. Liu, M. Li, Y. Liu, and Q. Liu, “Joint beamforming design for RIS-assisted integrated sensing and communication systems,” IEEE Trans. Veh. Technol., pp. 1–5, 2022.
- [16] T. Wei, L. Wu, K. V. Mishra, and M. R. B. Shankar, “IRS-aided wideband dual-function radar-communications with quantized phase-shifts,” in 2022 IEEE 12th Sensor Array and Multichannel Signal Processing Workshop (SAM), 2022, pp. 465–469.
- [17] Y. Li and A. Petropulu, “Dual-function radar-communication system aided by intelligent reflecting surfaces,” in 2022 IEEE 12th Sensor Array and Multichannel Signal Processing Workshop (SAM), 2022, pp. 126–130.
- [18] M. Najafi, V. Jamali, R. Schober, and H. V. Poor, “Physics-based modeling and scalable optimization of large intelligent reflecting surfaces,” IEEE Trans. Commun., vol. 69, no. 4, pp. 2673–2691, 2021.
- [19] Z.-q. Luo, W.-k. Ma, A. M.-c. So, Y. Ye, and S. Zhang, “Semidefinite relaxation of quadratic optimization problems,” IEEE Signal Process. Mag., vol. 27, no. 3, pp. 20–34, 2010.
- [20] M. Grant and S. Boyd, “CVX: Matlab software for disciplined convex programming, version 2.1,” http://cvxr.com/cvx, Mar. 2014.
- [21] B. Li and A. P. Petropulu, “Joint transmit designs for coexistence of MIMO wireless communications and sparse sensing radars in clutter,” IEEE Trans. Aerosp. Electron. Syst., vol. 53, no. 6, pp. 2846–2864, 2017.
- [22] M. Soltanalian and P. Stoica, “Designing unimodular codes via quadratic optimization,” IEEE Trans. Signal Process., vol. 62, no. 5, pp. 1221–1234, 2014.
- [23] L. Wu, P. Babu, and D. P. Palomar, “Transmit waveform/receive filter design for MIMO radar with multiple waveform constraints,” IEEE Trans. Signal Process., vol. 66, no. 6, pp. 1526–1540, 2018.