Minimizing optimal transport for functions with fixed-size nodal sets
Abstract.
Consider the class of zero-mean functions with fixed and norms and exactly nodal points. Which functions minimize , the Wasserstein distance between the measures whose densities are the positive and negative parts? We provide a complete solution to this minimization problem on the line and the circle, which provides sharp constants for previously proven “uncertainty principle”-type inequalities, i.e., lower bounds on . We further show that, while such inequalities hold in many metric measure spaces, they are no longer sharp when the non-branching assumption is violated; indeed, for metric star-graphs, the optimal lower bound on is not inversely proportional to the size of the nodal set, . Based on similar reductions, we make connections between the analogous problem of minimizing for defined on with an equivalent optimal domain partition problem.
Key words and phrases:
Wasserstein, Uncertainty Principle, Nodal Set, Metric Graph, Optimal Partition2020 Mathematics Subject Classification:
28A75, 49Q05, 49Q22, 52C351. Introduction
The study of nodal sets (or zero sets) of functions is a classic topic in analysis. Loosely speaking, the key question is, for a given a function, “how big” its nodal set is.111Here we use the term “nodal set” for a broad class of functions (see Section 2), whereas in other places it refers to the zero sets of a special class of functions, e.g., Laplacian eigenfunctions.
In recent years, this question has been connected to the notion of optimal transport. The intuition is as follows: given a sufficiently regular metric Borel probability space (e.g., a domain in or a Riemannian manifold) and a sufficiently regular and bounded real-valued function with mean zero over , we consider its positive and negative parts as densities, and the nodal set as the interfaces of their supports. If the nodal set is small, then there should be some regions in the support of that cannot be near the support of . Therefore, the cost of transporting to cannot be arbitrarily small.
A common metric which quantifies the notion of transport cost is the Wasserstein- distance . To make the connection between the nodal set and the transport cost more transparent, we ask:
| (1) | Given a nodal set of a certain size, which functions minimize ? |
The answer to this minimization problem should depend on the norms of ; first, the larger is, the more mass there is to transport. Second, the more localized the function is, as measured in this work by , the more mass can be concentrated near the interface, thus decreasing the transport distance and cost.
Before rigorously formalizing our question (see Question 1 in Section 2), we note that the motivation behind it originates from the following type of inequalities: for a domain ,
| (2) |
where , is a constant that depends only on the domain , and is a surface measure, e.g., the co-dimension Hausdorff measure. The first inequality of this type was proven by Steinerberger [48] for two-dimensional domains such as the unit square , with . This result was then generalized to certain compact domains in with arbitrary by Steinerberger and the second author with , see [45]. Subsequently, Carroll, Massaneda, and Ortega-Cerdà [16] improved the exponent to , and Cavalletti and Farinelli proved that the optimal is true in all dimensions [17]. The analysis in [17] takes place at a much larger class of metric measure spaces that satisfy the Curvature-Dimension () condition, where the nodal set can be measured using the notion of Perimeter [2, 39]. That result was then also proven for metric spaces [3, 4] by De-Ponti and Farinelli for all [21].
Despite the great level of generality of the above results, some fundamental questions still remain: is the inequality (2) with an exponent sharp? First, we do not know what the optimal constant is. More fundamentally, one may ask whether a multiplicative inequality is the natural one. Indeed, some works studied related additive inequalities [13, 15, 41, 52] regarding transport of the Lebesgue measure between disjoint domains. 222In particular, [15, Proposition 2.5] and [41, Lemma 2.8] consider the overall transport outside of a bounded set and prove that a lower bound on the transport cost must be inversely proportional to the perimeter of , i.e., if with volume , then for some universal .
But even the most general results regarding inequalities of the form (2) require an essentially non-branching property [17, 21]: all spaces satisfy this property [44], whereas the result of [17] is proven only to spaces which satisfy this property. A primary takeaway of our study is that it is indeed necessary in order for inequalities like (2) to be sharp.
1.1. Main results
In this paper, we formalize the minimization problem (1) and establish a strategy to its solution. We find the minimizers on three families of one-dimensional domains: a line (or an interval), a circle, and metric star graphs. The analysis of these domains leads us to the following key conclusions:
-
•
Generalized nodal sets for functions. Common to all these settings are that the minimizers are step functions, and therefore do not have nodal sets in the usual sense. Hence, it is crucial to extend the class of admissible functions and notion of nodal sets of continuous functions to a broader class of functions. Furthermore, it may be expected that this would be the right formulation through which to explore the minimizers in higher dimensions (see Section 6).
-
•
Strategy. Our work establishes a strategy to approach the minimization problem under consideration through a series of reductions of the class of feasible functions. The reduction strategy consists of three stages: (1) We reduce the functional minimization problem to a geometric one. Fixing the nodal domain, i.e., the interface between the positive and negative parts (see Definition 1), we show that it is always preferable to allocate the mass near the nodal domain. Thus, given a function we find a new function which is (up to a sign and scaling) the indicator function of a subset of the supports of , and for which the overall transport cost is cheaper. (2) We find that there is always a preferable configuration of the mass and the nodal points such that the optimal transport plan only couples adjacent intervals. (3) Steps (1) and (2) reduce the infinite-dimensional variational problem to a constrained finite dimensional problem, which one can solve by elementary means.
-
•
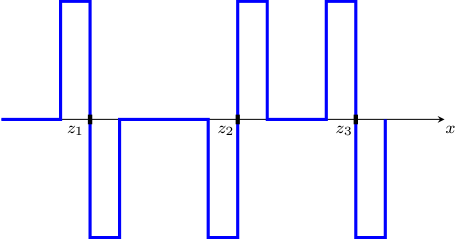
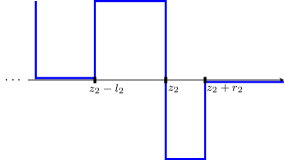
The minimizers By posing the question as a minimization problem, our work goes beyond previous works on the subject since we gain insight into the minimizers themselves. In the simplest case, the interval (or for every smooth non-intersecting curve), the minimizers are step functions whose only possible values are either or , as can be seen in Fig. 1. Thus, these are functions for which the optimal transport between and is local, across a single interface. Next, even though the circle introduces a new global structure, we show that the nature of the problem (and the minimizers) do not change.
-
•
Sharp multiplicative inequalities for the interval and the circle. The complete solution of the minimization problem allows us to explore the sharpness of the multiplicative “uncertainty principle” (2). For an interval, we find that multiplicative inequalities are optimal (Section 3). The sharp inequality for is
We further show that the same conclusion is not limited to an interval domain but also remains valid for a circle (see Section 4). This, in turn, leads us to seek for an example of domains, e.g., a metric star graph, for which the sharp lower bound is not expected to be multiplicative (see Section 5).
-
•
Metric star graphs. We carry our strategy to the more complicated case of metric star graphs (e.g., we need to solve Kontorvich’ problem and not Monge’s); Indeed, as before, Theorem 13 reduces the general minimization problem over into a finite-dimensional constrained optimization problem. The key difference, however, is that in contrast to the line and the circle, the optimal relation between the minimal transport cost and the other factors under consideration is not multiplicative on star graphs. The introduction of a node yields optimal lower bounds which depend on the geometry of the domain. For example, in the case of a star with sufficiently long edges,
When some of the edges are not sufficiently long, even more complicated forms of inequalities emerge. Our conclusions for star graphs echo and contrast the analysis of [17], where the multiplicative lower bound (2) is proved for a broad class of non-branching spaces. Since stars, and metric graphs in general, are branching spaces (see also [26]), one might expect a different type of results, as we indeed prove in Section 5.
The strategy and issues identified in this work are expected to be generalizable to high dimensional settings. The one-dimensional settings help establish the strategy in its simplest form, and allow us to reach easy-to-compute and precise constants. Furthermore, by considering graphs, we are able to expose the key challenges in going beyond all previous works on non-branching spaces. In Section 6, we outline the conjectures and key challenges in generalizing our strategy to multi-dimensional domains, as well as to general metric graphs.
1.2. Structure of the paper
Preliminaries, definitions, and the formulation of our minimization problem (Question 1) are given in Section 2. Then, the problem is solved for the interval (Theorem 5) and the circle (Theorem 7) in Sections 3 and 4, respectively. For star graphs, in Section 5 we re-formulate Question 1 as a finite-dimensional constrained minimization problem (Theorem 13) and solve it for a number of special cases. Finally, an outlook on the problem in multiple dimensions and on general metric graphs is presented in Section 6.
2. Settings
2.1. Nodal Sets.
Given a one-dimensional domain , constants , and , define
| (3) |
where is the set of points where changes its signed, defined as follows:
Definition 1 (effective nodal set).
Consider a measurable with finite and norms.
-
•
Define
-
•
Let , the set of all connected components of .
-
•
Let be the set of all elements of whose closure intersects both and .
-
•
Let be a set which consists of a unique point for every .
-
•
Finally, define the effective nodal set as .
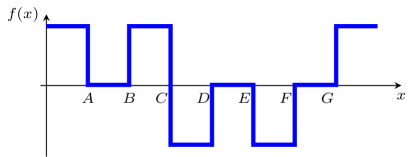
Our intention is to define in a way which exactly captures every sign change of once. Let us see that this is indeed achieved by the definition: consider, for example, the function in Fig. 2. While on , and so , it is not an element of , since it does not intersect with . Hence, no point in is contained in . The same is true for . By definition, . Lastly, , and therefore . Overall, changes its sign exactly twice and indeed .
We contrast our definition with those used in previous works:
-
•
In [45, 48], the objects of study are continuous functions, and therefore the interface between the supports of and is always contained in the set . For general measurable functions, therefore, Definition 1 of the effective nodal set need not coincide with for (consider e.g., on ). Moreover, for functions which are merely bounded but not continuous, these interfaces are not necessarily in , and hence the somewhat more complicated form of Definition 1.
-
•
The authors of [17] considered the quantity . First note that, in Euclidean settings, the Perimeter coincides with the Hausdorff measure of the reduced boundary of , and in particular for this is just the cardinality of the set.
Furthermore, the zero set in [17], , includes points where does not changes signs, e.g., and in Figure 2. This is not an issue when seeking lower bounds of the type (2), as adding points which are not interfaces between and can only increase the left hand side of (2). Since we solve minimization problems on functions with exactly sign changes, it is easier if we avoid such issues, even at a cost of a slightly more elaborated definition.
2.2. Optimal Transport and the Wasserstein distance.
We briefly recall the definition and certain key properties of the Wasserstein- distance. We refer to [47, 51] for a more comprehensive treatment of this topic. Let , a Borel set, and denote by the set of all Borel probability measures on with finite -th moments. Define the Wasserstein- distance between two measures as
| (4) |
where is the geodesic distance on and is the set of all Borel probability measures on with marginals and , i.e.,
| (5) |
for any and any Borel set .
A measure is often called a transport plan and minimizing is said to solve the Kantorovich problem. In some cases, there exists an optimal transport map, a function which solves the so-called Monge problem:
| (6) |
where by we mean the pushforward of by , i.e., the measure which assigns to any Borel set the measure . Any map that pushes to induces a transport plan , and the transport cost is unambiguously defined, i.e., we can write as a shorthand for .
On an interval , for any and any two atomless measures, an optimal transport plan is induced by an optimal transport map [47, Theorem 2.9], i.e., , with a monotonically increasing defined by
| (7) |
where is the cumulative distribution function (CDF), and the inverse is taken in the generalized sense, .333The statement holds more generally for the optimal transport with respect to any convex cost function on the line, but we will not pursue this level of generality here. For , this map is also unique [47]. Hence, the Wasserstein- distance has the much simpler form
| (8) |
In the particular case of , one gets the more straightforward formula with the CDFs (and not their inverses) , see [46, 50].
Our main question can be rigorously formalized as
Question 1.
For a one-dimensional domain with nonzero measure , , , , and , what are the minimizers and the minimum value of the minimization problem
| (9) |
By , we mean the -distance between the measures whose densities are and . Note that and are specified in the statement of Question 1 as necessary and sufficient condition for .
A crucial ingredient to study the above minimization problem is to establish an equivalence formulation that provides a characterization of the minimizers to the original problem. Connected to this, we present a sub-class of functions, defined below:
3. The Interval
In this section, we study the case of a nonempty interval with . Our strategy to answer Question 1, here and throughout this paper, is that of optimization; for every candidate function , we attempt to construct such that . The minimizers will therefore be the only functions for which further optimization is not possible, and we will show that, by construction, those are also global minimizers.
Lemma 2.
Let . For every , denote with for all . Then, there exists a function such that
-
(i)
-
(ii)
For any , on if and only if there, and
-
(iii)
for any , with strong inequality if .
Remark.
Even though the optimal transport plan in this case is given by the monotonic map (7), we will work in this proof with a general coupling . This level of generality shows that at least the geometric nature of the problem extends to the following more general setting: let be a simple curve, where is a monotonically increasing function in the geodesic distance for two points , and define the -transport cost as
| (10) |
Then, defining the optimal transport with respect to analogously to (4), Lemma 2 still holds. Also, it will allow us to generalize this statement immediately to star graphs in Section 5.
Proof.
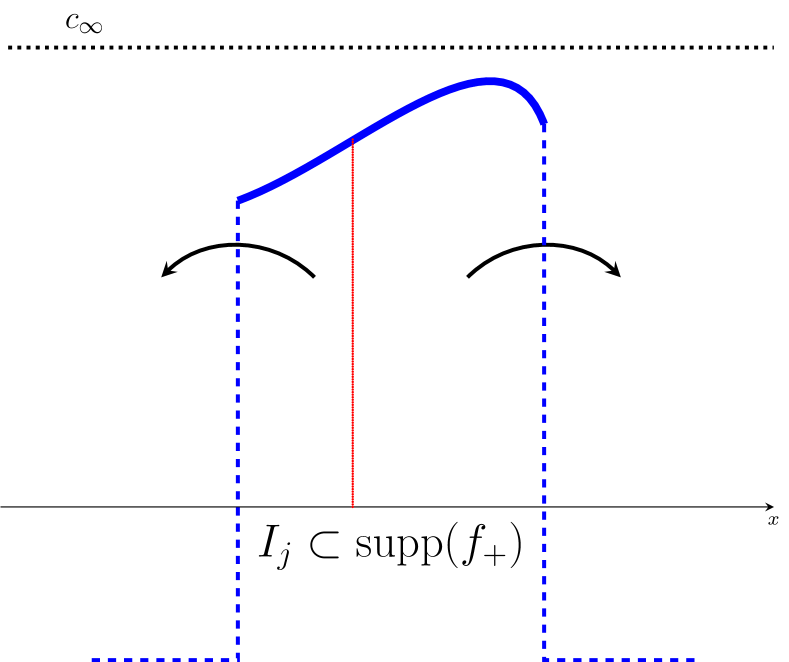
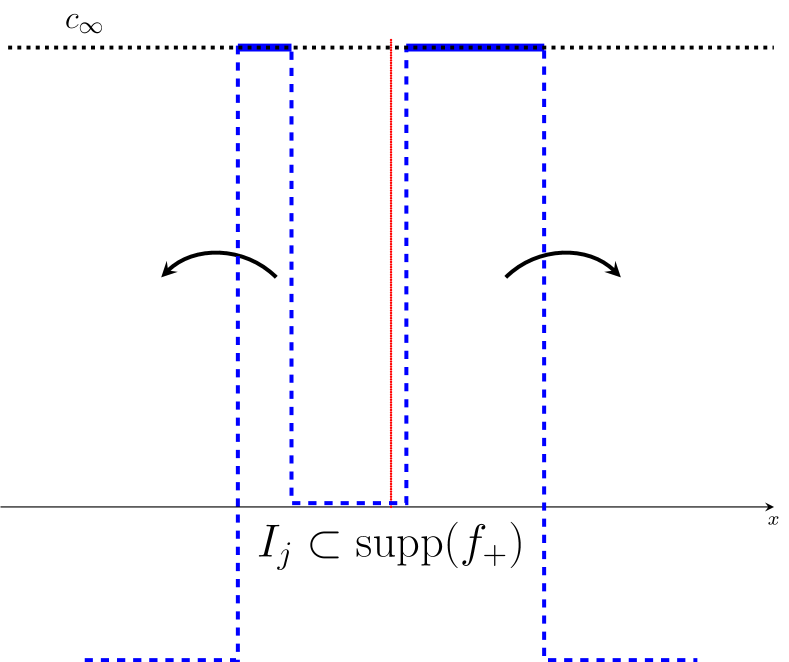
Consider an optimal transport plan between and , i.e., a measure such that , see equation (5). The intuition is that for each , some of the mass on has to be transported to the left by , and some has to be transported to the right, see Fig. 3(a).444The red dotted line, separating between the left and right transported parts in , is vertical in Fig. 3(a), since the optimal transport in this case is given by a map. In the case when the optimal transport is given by a coupling, this separation would be better depicted by a curve with . It is therefore less costly to have those respective masses already concentrated near the endpoints of , see Fig. 3(b).
To prove the above intuition rigorously, we will inductively define a sequence of functions in the following way: let and . For , we will define a function and a new transport map such that they satisfy conditions (i–iii) of Lemma 2 on the intervals and such that for any .
Since has a definite sign on each interval, suppose without loss of generality that is non-negative on (the negative case is completely symmetric). Define ; this is a Borel measure on which specifies how much mass from is transported in under .
Since the functions and (thus the functions and ) have disjoint supports, does not transports from into itself, and so . There exist two constants , such that (identifying and )
These are the masses transported from to its left and right, respectively.
We construct a new function with as follows:555Since the nodal set is independent of , we write unambiguously.
Clearly satisfies conditions (i)–(ii) of Lemma 2 on the interval , and by induction on the intervals as well. Since the mass transported from to the left is now concentrated on as much as possible (with density ), one can transport this mass to the left at a lower cost, by definition (4). The same holds for the transport out of to the right. The transport from any other positive interval is defined identically to . The resulting , the optimal transport plan between and , satisfies for any . This is because, under the new optimal transport plan, some of the mass is transported over a shorter distance, and no mass is transported over a longer distance.
Moreover, note that if , i.e., if the construction really did change the function (and so also ), then a nonzero mass is now transported over a shorter distance, and so a strict inequality holds .
Finally, we set . ∎
Lemma 2 implies that for any
And furthermore the minimum on the left hand side is attained only on . Hence, Question 1 reduces as follows:
Corollary 3.
For , the two minimization problems
have the same minimizers and the same minimum value for any .
Corollary 3 allows us consider the minimizers in Question 1 only from , simply by shifting the mass without changing the nodal set itself. To further reduce the problem, we will now allow for non-local shifts: we will move mass across sub-intervals, which may also change the nodal set (but not its size). To ensure that these non-local shifts reduce the transport cost, we will make use of the monotonicity properties of (7).
Lemma 4.
Let and . There exists a function such that , with the following property: denoting the optimal transport map (7) of by , then only transport mass between adjacent intervals, i.e., for every where , , and .
Proof.
Suppose without loss of generality that is nonnegative on . By definition, is characterized by nonnegative numbers, , such that on , on , and everywhere else,666Since , behaviors such as the interval in Figure 2 are excluded. see Fig. 4.
We will again construct a sequence of functions , now characterized by , such that
-
(i)
, where is the monotone optimal transport map (7) associated with .
-
(ii)
for
Set . Suppose without loss of generality that is nonnegative on . By Lemma 2, the mass in is transported to the left, i.e., to . By the induction assumption, in the -th step all of the mass in intervals with index less than is transported to adjacent intervals. Hence our inductive construction only needs to consider mass transported from to the right.
Assume transports an interval to a non-adjacent sub-interval to the right of , i.e., but .777Since is non-negative on , it is also non-negative on , and therefore the next-nearest interval on which is non-positive is .
For simplicity, suppose further that maps into a single interval, i.e., with ; Otherwise, if only maps a part of into , one can split into different sub-intervals each mapping into a distinct interval.
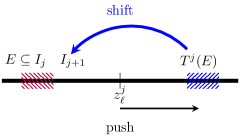
To construct , we would like to perform a shift operation, that is, to shift into . To make this more precise, consider first the ideal situation where on some subset of equal length, i.e., . In loose terms, it means that there is space for to be shifted into , and so we would set
| (11) |
In particular, in this case
The above construction, however, might no be possible; it might be that the interval is already full, by which we mean that if , the sub-interval on which is shorter than . Then the mass of cannot be shifted there (and cannot be defined as in (11)), since is a step function of height , and so cannot exceed this value and stay in . If this is the case, we need to push some or all of the points to the right by up to , and then we can repeat the above construction as in (11), with the shifted intervals and nodal points.
The shift operation is depicted on Figure 5. Let us consider the effect of the shift operation on the overall transport cost ):
-
•
The mass , which was previously transported between from to , is now transported over as shorter distance, to .
-
•
Suppose that for , the nodal endpoint was pushed to the right. By the inductive construction, the transport from/to could not have been from a point to the left of . If it was transported to/from a point to the right of , then the overall transport distance decreased.
-
•
Suppose that for , the nodal endpoint was pushed to the right. Suppose without loss of generality that (the negative case is analogous) and that for some , we have with ; the proposed shift would then increase the transport distance, by potentially pushing away from . This scenario, however, is impossible due to the monotonicity of , see (7): take two points and , then but we (since , hence a contradiction.
We note here that our construction cannot change the order of points, i.e., . Similarly, the construction keeps the nodal points inside , i.e., and .
We established the first property in the induction, that . Now, note that the new transport map we constructed is monotone and pushes to . Hence, it is an optimal transport map between and (the unique one for ), . By construction, it satisfies the adjacency requirement, that for all .
This completes the -th step. We take , which completes the construction. Finally, note that unless , we strictly reduced the transport cost at some stage of the induction, and so . ∎
Remark.
The proof of Lemma 4 relies on the convexity of the cost function with . When is convex, the monotone map (7) is a solution of Monge’s problem (6), see [47]. This is no longer the case if one considers a concave cost function, e.g., with . For concave costs, it is known that the maps may not be monotone [29, 36], and a different type of analysis will be needed. Another interesting cost function not considered in this work is the cost [7, 18].
We conclude that can be a minimizer of the problem (9) for if and only if it has the following structure:
-
(i)
.
-
(ii)
There exist such that for all , , and .
-
(iii)
without loss of generality, assume that on . Then for odd, on and on , and vice versa for even.
In less formal language, a minimizing step-function attains its maximal value anti-symmetrically around each nodal point , see Figure 1. The optimal transport plan , which is given by the monotone map (7), only transports across each nodal point, and is just the sum of costs accrued at each nodal point. The only questions that now remain concern the distribution of the width parameters , and the overall minimal optimal transport cost.
Theorem 5.
Let with , , , , and . The minimizers of the problem (9) are step functions, anti-symmetric about each nodal point, with value and width . These minimizers satisfy
| (12) |
Proof.
By (8), the transport cost across a single nodal point depends on the inverse CDFs.888Since might not be bijective, we define the inverse CDF by , see [47, Section 2.1]. By Lemmas 2 and 4, it suffices to consider step functions where mass is transported only to adjacent sub-intervals. Suppose without loss of generality that on and on . By definition, . Hence . On the interval (of cumulative probabilities) , the inverse CDFs are linear with slope , and so for every the difference between the inverse CDFs is constant, i.e., . Hence,
| (13) |
Summing up the contributions of all nodal points, then by (8) we have that
| (14a) | |||
| For simplicity of computations, we will minimize (which is equivalent to minimizing ). This is a constrained minimization problem, under the constraint | |||
| (14b) | |||
By the method of Lagrange multipliers, let
We get from the condition that
| (15) |
The condition yields
which leads to,
Combining the above expressions of together, we get , and the overall cost is, by (14a),
∎
As a consequence, we have
Corollary 6.
We thus see that for the case of , we have a sharp inequality (16) in a multiplicative form. The inequality shows no dependence on the length of , which can also be seen from the scaling properties of the quantities involves. Moreover, we are able to characterize an explicit constant factor which is also the best possible. Our result establishes that for , the inequality in [17, Prop. 3.1] is (16), and therefore it is indeed sharp. For , the scaling in [21, Corollary 3.3] of the lower bound is the same as here, , but the overall constant is lower since it is proven in more general settings. We may attribute the proof of the inequality (16) not only to properties of the special geometry in one dimension, but also the way the minimization problem (9) is posed; it is the solution to the latter that leads to, as a by-product, the most natural ”uncertainty principle” in a multiplicative form.
4. The Circle
We now consider the minimizers of in for the case where is a circle. As we see from the earlier discussion on the case of an interval, by scaling of we can restrict our attention to the unit circle . The geodesic distance between two points is defined by
For every we denote such that, without loss of generality
i.e., the nodal points are ordered from the -axis in a counterclockwise direction.
In this section we show that, on a circle, the minimizers and minimal value of (9) are analogous to those on the interval (Theorem 5 and Corollary 6):
Theorem 7.
Let , , , and . The minimizers of over are step functions in , anti-symmetric about each nodal point, with value and width . Hence
Proof.
Throughout this proof, we use the existence of an optimal transport map; for all orders there exists such a map , as established for in see [37] or [51, Theorem 2.47], and for in [28] (see also [47, Section 3.1] and [14, 10] for general metric settings). A more elaborate analysis of optimal transport maps on the circle appears in [24].
First, we note that the proof of Lemma 2 carries to the circle without change: it is an iterative process done on in each interval (arch) . Hence, we can restrict our attention to solving the optimal-transport minimization problem on , see Definition 2.
Next, we turn to extend Lemma 4 to the circle, i.e., to show that a function has a cheaper transport cost if the optimal transport map associated with it only transports mass between adjacent arcs. Here lies the main new challenge: we cannot simply implement our inductive “shifting” strategy from Lemma 4, since there are no end-points to the circle, and hence no natural candidate arc to start the induction from. To this end, we prove the following lemma:
Lemma 8.
Let and let be the optimal transport map associated with for a fixed . Then, there exists a partition into disjoint arcs such that for each arc , either
-
(1)
All points are transported clockwise to , or
-
(2)
all points are transported counterclockwise to , or
-
(3)
on .
To prove Lemma 8, we will rely on the existence of an optimal transport map (in the sense of Monge). For , recall the following theorem due to McCann [37] (for the Euclidean case, see [11]), presented here in a simplified form:
Theorem (McCann [37]).
Let be a connected, compact, Riemannian manifold without boundaries. Let and consider two Borel probability measures and with finite -moments, such that is absolutely continuous with respect to the volume measure of . Then, with respect to the Wasserstein- distance (4), there exists an optimal transport map . Moreover, there exists a vector field such that
| (17) |
where is the exponential map with respect to the geodesic distance.
Remark.
The case of is similar: the circle decomposes into a union of geodesics lines (arcs), known as “transport rays”, which intersect (potentially) only at their endpoints. On each such transport ray, the optimal transport map is monotone; see details in [47, Section 3.1] and [28].
Proof of Lemma 8.
First consider . Choose any , and suppose first that is transported clockwise from , i.e., is clockwise to on the shorter arc between the two points. Then, any point lying on that arc is also transported clockwise, since the vector field points clockwise on that arc. Hence, the set of points for which transports clockwise is a union of arcs, and so each is a connected component of that set. If is counterclockwise, the proof is analogous, and together these type of arcs cover . The remaining points on are those where , and by the extension of Lemma 2 to the circle, it too is covered by disjoint arcs. This completes the proof for .
For , the decomposition of the circle into transport rays, on each of which the optimal-transport map is monotone, yields an analogous proof. ∎
Proof of Theorem 7 - continued: Suppose first that , i.e., it is not the case that all points are transported clockwise (or counterclockwise). Then, on each arc we can apply the analysis from the case of the interval. Suppose points are transported clockwise on . Therefore the counterclockwise end of has to be in , and we can choose it as the starting point of the inductive process in Lemma 4.
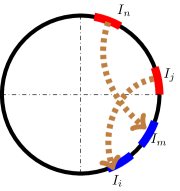
If, on the contrary, assume that without loss of generality, all points are transported counterclockwise. If each is transported to the adjacent interval, the proof is completed. Assume otherwise, i.e., that we are in a “lagging” scenario as in Figure 6. We claim that this cannot be the optimal transport map for a minimizer of . This can be shown by constructing for which as follows:
Let be the nodal points arranged in a counterclockwise order, with an arbitrary starting point. As before, denote by the arcs between and , where is the arc between and . Assume without loss of generality that , and set for to be the same as for . Adjacent to counterclockwise we set a negative arc precisely of the length , and we define the new pushforward map as the monotonic map from to . We do so iteratively - we position positive intervals precisely of the size they had for , and then a negative interval of the same size. In defining , the and norms are unchanged, and so it the number of nodal points. While the map might not be the optimal transport map between to , the overall transport distances have been reduced and so .
Hence, we have extended Lemma 4 to the circle, for all . Now, since the transport occurs only across nodal points to adjacent intervals, our Lagrange-multipliers analysis for the case of the interval applies, and we obtain the desired result. ∎
Remark.
The work of Delon, Salomon, and Sobolevskii [24] suggests an alternative route to prove Lemma 8 on the circle: “lifting” each measure on the circle to a periodic measure on the line, they study locally optimal transport maps between the “lifted” periodic measure. These measures are similar to up to a shift, and therefore in particular, are monotonic. We do not pursue this strategy further in this work, and refer to [24] for details.
5. Star graphs
Given a positive integer , we define the star graph as the quotient space of the disjoint union of intervals where for , under the equivalence relation . For ease of notation, denote by the point for every and every .
We will call the point the vertex of the star. Definition 1 for extends to . Consequently, the definitions of (see (3)) and (see Definition 2) naturally extend to the case of star graph as well. The distance between any two points and is if , and otherwise, i.e., if the two points are on different edges of the star, the geodesic distance between them is the length of the path going from to through the vertex .
Stars are a class of spaces where we might expect the optimal dependence between and the number of nodal points to be non-multiplicative, for the following reason: In [17, 20], the sharp (up to a constant) uncertainty quantification (2) was derived for metric spaces which are essentially non-branching. Intuitively, this means that if are two “generic” geodesic lines of unit length, and on an open subset of , then everywhere; see [44] for details. Star graphs, however, are certainly spaces with branching (and so are trees in general). Hence, in search for new types of dependencies between and , stars are excellent candidates over which to study the minimization problem stated in Question 1.
The technical difficulty is that, on the star, we do not have explicit optimal maps such as (7) for the interval, nor do we even expect the existence of optimal transport maps, i.e., we expect a solution to the Kontorovich problem (4), but not Monge’s (6). More broadly, stars are an example of metric graphs, on which the study of optimal transport is at a relatively early stage [26, 35].
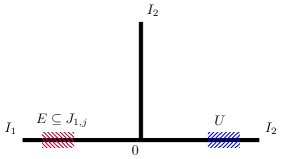
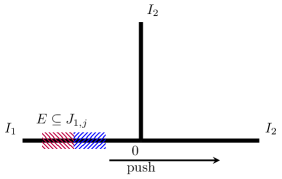
Main results: The key element of our analysis is that it is always “useful”, in the sense of minimizing , to position one of the nodal points at the vertex of the star. We approach Question 1 on stars by establishing a correspondence between transport over a star-vertex and transport on the real line (Lemma 9). This equivalence allows us to reduce the minimization problem to a finite-dimensional constrained optimization problem (Theorem 13).
From there, the optimization problem bifurcates into several different cases, depending on both the topology and the lengths of the star’s edges. In Sections 5.2–5.5, we work the details of the following cases:
-
•
For an even number of sufficiently long edges, the vertex is equivalent to nodal points. Hence, we have a multiplicative uncertainty principle of the type (presented here for simplicity with )
see Section 5.3.
-
•
For an odd number of sufficiently long edges, the main complication is that there is an imbalance between the number of positive and negative edges around . Nevertheless, we get the same type of inequality, only now with (Section 5.4)
-
•
When one of the edges is short, no or type inequalities emerge, but the lower bounds we obtain “interpolate” between the case of a star with long edges (and a “degenerate” -th edge with length zero) to the case of long edges (Section 5.5).
In summary, for stars with long edges, the vertex is effectively equivalent to or nodal points on the line, depending on whether is even or odd, respectively. Finally, while we can interpolate between to edges by shortening/lengthening the edges, the general case of a star does not seem to admit such a clean result; Indeed, an “uncertainty principle”-type lower bounds on , such as (16), breaks even in relatively simple metric graphs, thus demonstrating that the non-branching property used in [17] is indeed necessary.
5.1. Stars – the general framework
Our strategy to prove the main result, Theorem 13, consists of two parts. In Lemma 9, we analyze the optimal transport problem in the case of a single nodal point on the star vertex. Lemma 11 generalizes Lemma 4 on the optimality of transfer to adjacent sub-interval to the case of the star graph. The main technical difficulty here is that we cannot assume the existence of optimal transport maps (in the sense of Monge’s problem (6), as opposed to Kantorovich (4)), on graphs. Indeed Lemma 9 shows that already in simple settings of the optimal transport plan will not be induced by a map. Moreover, we cannot expect to have monotonicity in the strict sense, due to the geometry of the graph. Nonetheless, Lemma 12 shows that the optimal transport plans satisfy a sufficient monotonicity-like property.
We begin with functions satisfying .
Lemma 9.
Let be integers and consider where for every ,
| (18) |
Define as999Here we identify with the point with the exact same value. This is unambiguous since each is only defined on the respective edge .
| (19) |
such that is supported on and is supported on . Then there is a surjective correspondence such that for every and . Hence,
Proof.
For for every and any two measurable sets , define
| (20) |
where for every we define . is a Borel measure on with marginals and , simply by additivity. That follows from definition (4): the same amount of mass travels the same distance in both plans. To summarize, we have shown the inclusion
To conclude that we need to prove inclusion in the other direction, i.e., to find for any a coupling such that . We define in a symmetric manner: for any two measurable sets and ,
and for any general sets , then
Again, by definition is a Borel measure on . To verify that , we compute its marginals. Let . Necessarily is an element in one of the negative intervals , then for any measurable set
where at the last passage we used the fact that is the density of the second-coordinate marginal of any , i.e., that . The calculation of the second-coordinate marginals of is analogous.
To solve the minimization problem on , we first state an extension of Lemma 2 to star graphs, where the proof is completely identical to that of Lemma 2:
Lemma 10.
For every , there exists a function such that
-
(i)
-
(ii)
For any sub-interval between to adjacent nodal points, i.e., where and , then on if and only if there, and
(21) If , (21) also holds when is a maximal star-like subgraph for which but is disjoint from the interior of .
-
(iii)
for any with equality possible only if as well.
We now proceed to prove an analog of Lemma 4 for star graphs; the minimizers of in are those where mass is transported only between adjacent sub-intervals.
Lemma 11.
Let . There exists such that for every , with the following property:
If is an optimal transport plan, then only transport mass between adjacent intervals. By this, we mean that if and are two closed sub-intervals between two adjacent nodal points (or the smallest star-like subgraph between the nodal points closest to ), then only if .
The new challenge in proving Lemma 11 is the absence of a monotonicity property. On the interval, the explicitly optimal transport map (7) is monotone. On the circle, monotonicity is a consequence of the exponential map form of (17) (or of the more specific construction in [24]). On star graphs, while we cannot hope for monotonicity in the usual sense, we show that a similar property (Lemma 12) is sufficient to demonstrate that the shift operations described in Lemma 4 can be implemented on as well (Lemma 11).
Proof of Lemma 11.
We define the following disjoint partition:
where on each interval that comprises the star graph , we denote the sub-intervals between adjacent nodal points by where for each , and where the subintervals are ordered by decreasing distances from . Finally, let be the smallest star-like graph between the closest nodal point to . If , then . For ease of notation, it is useful to denote for all .
We repeat the inductive construction of Lemma 4 (see Figure 8 for illustration): for each , we iterate over all for which . Suppose without loss of generality that and that for some set of nonzero measure we have that is supported on non-adjacent intervals, i.e.,
For each non-adjacent interval where is supported, we will shift that exact same mass to either or , depending on the relative order between the intervals.
As in Lemma 4, these shifts might require to push away from some nodal points to create room for the negative mass. See Figure 8 for an illustration. Suppose then that some interval of length was shifted from to , and that all or some of the mass between them has been pushed away from . To exclude these scenarios, we state a monotonicity lemma (in the spirit of [47, Theorem 2.9]):
Lemma 12.
Let be an optimal transport plan with respect to with , let , let , and let . Then the following scenarios are impossible:
-
(1)
are distinct, , , and .
-
(2)
are distinct, , , and .
-
(3)
, , and (it may or may not be that , i.e., may or may not be part of the same edge).
Here, as before, for every and every , we denote by the point on whose distance from the vertex is . The same notation applies to , , and .
Lemma 12 is a star-graph analog of the monotonicity property (7) of optimal transport on the line: item (3) is the most straightforward, since it implies that all four points lie on the same linear path. Item (1) (and analogously (2)) is depicted in Figure 8(C) with , , and being distinct, , i.e., and do not lie on the same edges, and is on the path between and .
With the help of Lemma 12, we now make the following claim: if a set with nonzero mass between and was pushed away from , then it cannot increase the overall transport cost.
As in the case of the interval or the circle, proving this claim would show that our inductive construction decreases the transport cost, thus proving the lemma.
To proceed with the proof of the above claim, we note that such a “push” away of a set from (towards the vertex ) could increase the overall transport cost in three scenarios: either (i) the optimal-transport plan couples to a set further away from the vertex on , i.e., in , or, (ii) couples to an interval between and (iii) couples to a third interval, i.e., not and not . We will now rule out both all these three scenarios.
First, (i) is impossible since there cannot be a point which was previously transported into a pushed interval, due to the inductive construction. The only other way for the transport distance to increase with the shift is if is on the path between and and that with . Lemma 12, item (3) similarly rules out scenario (ii). We are left with scenario (iii), depicted in Figure 8(c). We remark that it is really this scenario that distinguishes the star graph from the interval.
Here, , and so Lemma 12, items (1)–(2), imply that . Hence, up to relabeling of the edges, we have that with , and . By a slight abuse of notation, let and be the infimum of all values such that and satisfy these hypotheses, i.e., the closest to the vertex .
To rule this scenario out, let us now define an auxiliary function, , which exchanges the values of on between and . Formally, for every and every
Let us also define to be the coupling between and which is identical to , with the corresponding changes. We now proceed to make one helpful observation that is an optimal transport plan between and .
Indeed, since is transported to , then no other point on is transported to . This would contradict monotonicity on the interval (see item (3) of Lemma 12). The analogous statement holds for as well. Hence, the “exchange” of intervals did not change the distances along which mass is transported, and so , and so .
We now want to show an inequality in the other direction. Let be an optimal transport plan for , then is a coupling of and , and so
Hence we have equalities throughout, and in particular , and so is an optimal transport plan from to .
By construction (as it were with ), and due to the “exchange” now we have that . This violates item (3) in Lemma 12.
Thus we arrive at a contradiction. Hence . But now consider the situation where , with . By the exact same argument with the roles of and interchanged, we arrive at a contradiction again. We have ruled out scenario (iii), as depicted in Fig. 8(c).
To summarize, the proposed shift cannot increase the transport cost, and therefore Lemma 11 is proven.
∎
Proof of Lemma 12.
Consider first the case of , where is strictly convex. First, recall that the support of is -cyclically monotone [47, Theorem 1.38], i.e.,
| (22) |
We will show in detail how the first of the three scenarios is impossible, as the others follow similarly.
Assume without loss of generality that , , and , as in Figure 8(c). Denote . Then (22) reads as
| (23) |
Suppose first. Then
We can express the “sandwiched” numbers, and , as linear interpolation between the endpoints and ,
where
However, is strictly convex for , and so combined with (23), then
which is a contradiction.
The case of is proven by approximating by a sequence of strictly convex functions, see [47]. Crucially, even though and not on the real line, is really a shorthand for operating on the geodesic distance (on the graph) between and , and hence the procedure generalizes to the graph.
We have proven item (1) in the lemma. Item (2) is analogous, but with interchanging and with and , respectively. Item (3) reduces to the standard analysis of the interval, since all four points lie on the same line.
∎
Remark.
While it is preferable to have , it might not be possible; A sufficient condition is to have at least two sufficiently long edges. Up to a relabeling of the edges, we make the hypothesis that
i.e., all of the positive and negative mass could be allocated on and , respectively, in intervals adjacent to . This is a sufficient condition that avoids somewhat pathological star graphs for which cannot be efficiently utilized as a nodal point. Such graphs might resemble an interval attached to many short edges at its end, see e.g., Fig. 9.
Since the minimizers of on shift mass only between adjacent sub-intervals (Lemma 11), we can now integrate our analysis of the single-point case (Lemma 9) and conclude that it is always preferable to have a nodal point on the vertex. Hence, minimizers have the following form:
-
(1)
The vertex is a nodal point, i.e., , and there exists such that on is non-negative for , and non-positive for . The overall mass concentrated around is therefore
-
(2)
The other nodal points are “internal”, i.e., for each there exists such that and is an anti-symmetric step function around it with length , as in the interval case of Section 3.
Therefore, one needs to optimize only the positive step-widths and . We summarize these results in the following theorem:
Theorem 13.
Suppose has at least two edges longer than . Question 1, i.e., minimizing over , is equivalent to finding and a configuration function which minimize
| (24a) | |||
| where | |||
| (24b) | |||
| subject to the mass conservation conditions | |||
| (24c) | |||
| and the admissibility constraints | |||
| (24d) | |||
Note that, since is given explicitly by the equivalence established in Lemma 9, see (19), and since it is a function on the line, is given by the respective inverse CDFs as in (8). Therefore optimizing involves a direct, closed form calculation (see below). Moreover, if the edges are long, i.e., for any , then the first constraint can be satisfied for any assignment of ’s and nodal point, i.e., for any choice of . Hence, (24) becomes computable in closed form without having to enumerate over all configuration functions .
We can also see what is the complication introduced by short edges - if e.g., , then effectively the number of effective edges becomes (in the sense that only vanishingly small mass can be assigned to ), thus changing the solution. Hence, obtaining a closed-form expression for (24) can be algebraically daunting. In fact, already for , where , there are some complications. We will work out a few cases.
5.2. Long edges,
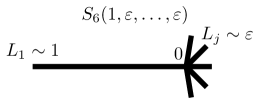
We find the minimizers of on where all edges are sufficiently long.101010The notation of the norm by here will be convenient when we consider in the next section. As discussed above, it is always preferable to have the nodal point at . Moreover, it would always be better to distribute the mass on all edges. This is because the and constraints imply that “wasted” edges (on which everywhere) lead to transport over larger distances, and so to a more expensive optimal transport cost. Hence, , the equivalent function on the line given by (24a). Since the edges are sufficiently long, if has positive edges, then could be a general function with . Hence, by our analysis for the interval (Section 3), the optimal is of the form:
Crucially, an to which this is equivalent is only possible when all of edges (the different ’s) are sufficiently long. In that case, the corresponding will be of the form
| (25) |
where and are determined by the mass conservation relation (24c), which reduces to
| (26) |
In these settings, minimizing reduces to finding the optimal parameters and .
Proposition 14 ( on a star).
Suppose has at least two edges longer than . Then,
is given by (25) with , the lower integer part of .
Proof.
Since the equivalent (see Lemma 9) is a function on an interval, we can use the explicit formula in terms of the inverse CDFs, (8). By direct calculation, the inverse CDFs, defined on the interval , are and . Assume without loss of generality that , and so . Hence,
| (27) |
Hence, is minimized when , i.e., when , which by the mass conservation relation (26) yields .
When is even, substitution of into (27) yields
| (28) |
which is the same as in the single step function case for , see (13).
When is odd, is not an integer, and therefore not an admissible choice. We claim that the optimal choices are either or . To see that, first note that the integrand in (27) is monotonic in . Moreover, by the mass conservation relation (26), we get that
| (29) |
for any . Hence, is monotonic convex in near its minimum at , and the closest integer values, and , minimize the cost.
To find the minimal cost, first, by direct computation of the integral in (27), we get
| (30) |
By substitution of into (29), we get that
Similarly, by the same constraint in (27), we have that
Substituting the expressions for and into (30), we get
To compare this expression to the even case (28), let us set . Then
| (31) |
with as defined before. Since
we easily see that lies in between the optimal cost for stars with and . This is consistent with the intuition that as increases, the cost decreases.
Either is even or odd, the overall transport cost is cheaper than the case of an internal point. This makes intuitive sense, because a nodal point on the vertex allows for more mass to be transported over a shorter distance, due to Lemma 9. ∎
5.3. Long edges, , is even
In principle, now one can go to the general case of and, using the minimization formulation (24), find the minimizers. Comparing the even and odd cases in (28) and (31), respectively, it seems that the case of even is more tractable.
The total cost of transport through the -vertex depends on a single parameter , which is not yet determined. Equivalently, it depends on , the amount of mass concentrated around the vertex, with . Since we assume that the edges are sufficiently long, then (based on our analysis for the interval in Section 3) the minimization problem (24) simplifies by . We therefore wish to minimize
| (32) |
subject to
As in the case of the interval (Section 3), we use the method of Lagrange multipliers
Then
and
In particular, . The constraint associated with then yields
and the minimal optimal transport cost is
In comparison with Theorem 5 for the interval, we see that for a star with an even number of edges that are sufficiently long, is replaced by , i.e., the vertex as a nodal point is equivalent to nodal points on a line.
5.4. Long edges, , is odd
In this case, the same argument yields a much more cumbersome expression, and so we resolve it only for . Lagrange multipliers method now yields
Here, since , it is easier to minimize the cost with respect to , the total mass around the vertex. Then
and so
The constraint now reads as
As a sanity check, we see that as . We note that, in this case, the sharp lower bound for reads like
| (33) |
Compared with the case where the number of edges is even (see Sec. 5.3), may be viewed as the effective multiplicity of the nodal point at the vertex.
The key difference between the lower bounds on for stars and the lower bounds obtained for non-branching spaces (the interval, the circle, and general -dimensional surfaces in (2), see [16, 17, 45]), is that here the lower bound does not admit a multiplicative ‘uncertainty principle’-like structure of , where depends on the domain and norms of . Nevertheless, for the cases in Sections 5.3 and 5.4, we may still say that the structure is preserved with an effective that is replaced by to account for the particular geometry of the nodal point at the vertex of the star. However, discussions below imply that the precise characterization of could be much more involved than only the degree with short edges present.
5.5. with one short edge, and
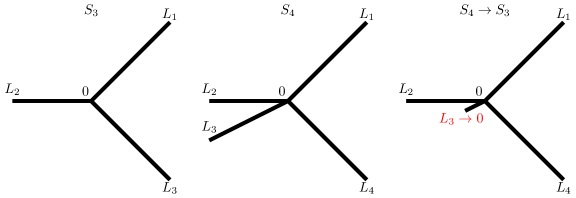
In the long-edge cases discussed above, the minimization problem given in Theorem 13 is assumed to have a solution in the interior of the constraint set (24d). To see further how the geometry affects the conclusion on the minimal optimal transport cost, we consider the special case of , with two long edges and a third short one as an illustrative example. Our goal is to see how the limit interpolates between with three long edges, and .
First, note that to optimize the transport cost in the present case, it remains advantageous to include the node of the star in . Moreover, the maximal amount of mass should be assigned to the short edge if its length is sufficiently small. Meanwhile, away from the node, we retain the symmetric structure around the other points in that are located on the long edges. Near those points, we utilize earlier discussion and use to represent the length of the subintervals on which the functions are taken to be with the total optimal transport cost given by .
As before, to get an explicit expression for (24a), we need to work out as a function of the overall mass assigned to the vertex, . Assume without loss of generality that on and on and near the node. For , then the maximal amount of mass should be assigned to , i.e., and on . By the consideration above, we have that the equivalent is of the form
for two undetermined constants . For , we can use the CDF counterpart of (8), , where are the CDFs of . By direct computation
Since the overall mass conservation (24c) reduces to , we have that
Putting these considerations together, the minimization problem in (24) reduces to
subject to the mass conservation constraint
Thus, for , we get the optimal transport cost
| (34) |
with equality for
as an interpolation parameter between and an interval.
We can understand these expressions between the two limits of either shortening or lengthening , i.e., as the star graph deforms into an interval with on one hand and as third edge becomes long enough for us to recover the case of three long edges, as described in Sections 5.2 and 5.4. Note that our analysis involving the short edge holds precisely until the case where there is no distinction between and in terms of mass allocation. By the results in Section 5.4, the optimal mass around the origin for is . Since near the vertex, and both contain the support of , the threshold length for to enable the optimal thus corresponds to . Indeed, we may rewrite the right hand side of (34) to get an equivalent form given by
The lower bound is clearly a decreasing function of for , hence interpolating, as expected, between the lower bound derived in (16) for and (i.e., for the case of an interval) and that given in (33) with and .
Meanwhile, for small but nonzero , the non-multiplicative nature of the lower bound on the right hand side of (34) is evident. Compared to the cases in Sections 5.3 and 5.4, we see that the multiplicative form is lost not only in terms of but also with respect to .
Remark.
What can be said on stars such as in Fig. 9, for which Theorem 13 does not apply? We outline the strategy for their analysis: first, the equivalence relation in Lemma 9 can be extended to a single nodal point near the vertex, on the long edge. The adjacency and monotonicity arguments (Lemmas 11 and 12) seem to go through as well. Then, the optimization problem in Theorem 13 should be extended by adding another parameter to represent the location of that “special” nodal point, which is near the vertex. Finally, we remark that the condition for a long edge being is sufficient, but not necessarily sharp. The sharpness of this lower bound would become one interesting element in the study of Question 1 on general metric graphs.
6. Outlook
An important message of this work is that the original problem of minimizing the transport cost over the specified function class is equivalent to a generalized minimal surface problem associated with optimal domain partition. For one-dimensional domains, minimizing the cost reduces to optimally positioning the nodal points and locating masses around them. We believe that this approach can be generalized to more challenging cases, some of which are discussed below.
Multidimensional domains
In an analogous way to the one-dimensional settings of this study, it seems that on bounded and regular domain , the minimizers will be step functions concentrated near the interfaces between and . If this is indeed the case, the key remains to be the solution to the minimization problem
| (35) |
It should be commented that, for step functions, the existence of a lower bound ((2) [16, 17, 45]) combined with nucleation arguments such as [41, Lemma 2.8], should yield the existence of minimizers. An element in corresponds to a unique partition of into three disjoint subsets , where , such that
assuming that the partitions are sufficiently regular such that is well defined. Denoting the set of such partitions by , one may attempt a similar approach to the one presented in this work: reducing the functional minimization problem (35) to a purely geometric one:
| (36) |
Clearly, the latter becomes an optimal partition problem or a minimal surface problem. That is, the problem under consideration may be formulated as an equivalent geometric question.
Question 15.
For a bounded and regular domain , , , and , what are the optimal partitions of and the corresponding minimum value associated with the problem
| (37) |
This draws interesting connections to possibly other optimal domain partition problems such as those related to different optimal transport minimization problems, e.g., partitions defined by the optimal quantization (centroidal Voronoi tessellations) [25, 38]. One may find more discussions on other optimal domain partition problems in [12]. A variation of Question 15 considered in [13, 41, 42, 52] is to modify the set of feasible partitions by removing the constraint on the prescribed measure of the nodal, and consider the minimization of where is the Hausdorff measure of the boundary set of and is a penalty constant.
The solution to the purely geometric Question 15 can be used to offer a new perspectives on the existing studies concerning (2) in multiple-dimensions [48, 45, 16, 17] and to make further connections with the bilayer membrane limits [42, 34]. In particular, the optimal transport problem admits a decomposition into a continuous family of one-dimensional optimal-transport problems. One of the main challenges is that, as we seek to solve (37), this decomposition changes as well. Based on the discussion on the one dimensional examples, it is obvious that the optimal partitions may not be unique in general, even though they yield the same optimal transport cost. While a complete solution is beyond the scope of this work, one might conjecture that is made of piecewise planar surfaces, which are the conventional minimal surfaces in the Euclidean space.
Metric graphs and Laplacian eigenfunctions
This work is a starting point for the study of the Wasserstein minimization problems on metric graphs, for which the star (Section 5) is perhaps the most basic nontrivial example. Our analysis for suggests what might be the key challenges for general metric graphs - first, that the associated minimization problems might be algebraically complicated, and second, that the equivalence principles (Lemma 9) are not easily extended to general graphs. The second key challenge is to find a monotonicity-like property which generalizes Lemma 12 to non-star graphs.
While the study of optimal transport on metric graphs is relatively new [26], the study of nodal sets of special functions on metric graphs is a well established field, see e.g., [1, 5, 6, 9, 19, 31, 32], as well as [8] and the references therein. In its heart, the question is a natural extension of Sturm’s Oscillations Theory: given the -th Laplacian eigenfunction on a certain metric graph, how many zeroes does it have?
Independently, uncertainty principles for the Wasserstein distance such as (16) were applied to generalize Sturm and Sturm-Hurwitz (sums of Laplacian eigenfunctions) type results in dimensions [16, 17, 45, 48]. Generally speaking, the approach proceeds in two steps: first, prove a lower bound of the type (16), and then, obtain an upper bound on for the specialized type of functions under consideration, e.g., Laplacian eigenfunction. The current work might therefore open the way of connecting these two lines of works, though many open challenges remain before such a connection is established.
Minimization over more specialized function classes
Concerning the possible connection to properties of Laplacian eigenfunctions, related studies on lower bounds and uncertainty-principles of Laplacian eigenfunctions on Riemannian manifolds (and spaces in general) can be found in [21, 40, 49]. One may note that the key to get the new lower bounds like (16) presented in this work is through the study of the minimization problem over the function class defined by, e.g., (3). The latter class is large enough to allow minimizers taking on the form of step functions. On the other hand, eigenfunctions of elliptic operators are smooth. Thus, another natural research direction to explore is the study of possibly different bounds, associated with similar minimization problems, but over classes of functions that are more regular or of special forms. In particular, the special forms may correspond to discrete function spaces, and the problem of passing from discretizations of functions, where the minimization problem is finite-dimensional, to the continuum limit (studied in this paper), might be of independent interest.
Functional analytic perspective
Inequalities such as (2) and (16) can be thought of as interpolation inequalities. On the lower-bound side, there are the and norms involving no derivatives. The upper bound consists of two terms, which can be connected to derivative norms of different orders, respectively: first, is smaller than , where the derivative is taken in the sense of functions of bounded variations [27, 30]; then, can be viewed as norms of derivatives of negative order, e.g., the distance is related to the standard Sobolev norm; See [33, 43] for details.
While this functional-analytic perspective is not used in this paper, it can lead to the exploration of more general variational problems of the type Question 1, e.g., by allowing for constraints not only in and , but in other norms such as norms for . Moreover, understanding (2) as an interpolation inequality, (16) can be thought of as a sharp interpolation inequality with optimal constants, of which an extensive literature exists [22, 23].
Acknowledgments
The authors would like to thank Ram Band for many invigorating discussions and help provided along the way, as well as for suggesting to study this minimization problem on metric graph and highlighting some of the challenges in that area. The authors would also like to thank Raghavendra Venkatraman for bringing to our attention an issue with one of the definitions in a previous version of this manuscript. Many thanks to Fabio Cavalletti and Tim Laux for useful comments and references. Thanks also to Zirui Xu for bringing references [34, 42] to our attention. The research of Q.D. is supported in part by NSF DMS-1937254, DMS-2012562 and CCF-1704833. A.S. acknowledges the support of the AMS-Simons Travel Grant, and is supported in part by Simons Foundation Math + X Investigator Award #376319 (Michael I. Weinstein).
Data availability
Data sharing not applicable to this article as no datasets were generated or analysed during the current study
Conflict of interest
The authors have no conflicts of interest to declare that are relevant to the content of this article.
References
- [1] Lior Alon, Ram Band, and Gregory Berkolaiko, Nodal statistics on quantum graphs, Communications in Mathematical Physics 362 (2018), no. 3, 909–948.
- [2] Luigi Ambrosio and Simone Di Marino, Equivalent definitions of bv space and of total variation on metric measure spaces, Journal of Functional Analysis 266 (2014), no. 7, 4150–4188.
- [3] Luigi Ambrosio, Nicola Gigli, Andrea Mondino, and Tapio Rajala, Riemannian ricci curvature lower bounds in metric measure spaces with -finite measure, Transactions of the American Mathematical Society 367 (2015), no. 7, 4661–4701.
- [4] Luigi Ambrosio, Nicola Gigli, and Giuseppe Savaré, Metric measure spaces with riemannian ricci curvature bounded from below, Duke Mathematical Journal 163 (2014), no. 7, 1405–1490.
- [5] Ram Band, The nodal count 0, 1, 2, 3,… implies the graph is a tree, Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences 372 (2014), no. 2007, 20120504.
- [6] Ram Band, Gregory Berkolaiko, Hillel Raz, and Uzy Smilansky, The number of nodal domains on quantum graphs as a stability index of graph partitions, Communications in Mathematical Physics 311 (2012), no. 3, 815–838.
- [7] E Barron, M Bocea, and R Jensen, Duality for the optimal transport problem, Transactions of the American Mathematical Society 369 (2017), no. 5, 3289–3323.
- [8] Gregory Berkolaiko and Peter Kuchment, Introduction to quantum graphs, no. 186, American Mathematical Soc., 2013.
- [9] Gregory Berkolaiko and Tracy Weyand, Stability of eigenvalues of quantum graphs with respect to magnetic perturbation and the nodal count of the eigenfunctions, Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences 372 (2014), no. 2007, 20120522.
- [10] Stefano Bianchini and Fabio Cavalletti, The Monge problem for distance cost in geodesic spaces, Communications in Mathematical Physics 318 (2013), no. 3, 615–673.
- [11] Yann Brenier, Polar factorization and monotone rearrangement of vector-valued functions, Communications on pure and applied mathematics 44 (1991), no. 4, 375–417.
- [12] Dorin Bucur, Giuseppe Buttazzo, and Antoine Henrot, Existence results for some optimal partition problems, Advances in Mathematical Sciences and Applications 8 (1998), 571–579.
- [13] Giuseppe Buttazzo, Guillaume Carlier, and Maxime Laborde, On the Wasserstein distance between mutually singular measures, Advances in Calculus of Variations 13 (2020), no. 2, 141–154.
- [14] Luis Caffarelli, Mikhail Feldman, and Robert McCann, Constructing optimal maps for Monge’s transport problem as a limit of strictly convex costs, Journal of the American Mathematical Society 15 (2002), no. 1, 1–26.
- [15] Jules Candau-Tilh and Michael Goldman, Existence and stability results for an isoperimetric problem with a non-local interaction of wasserstein type, ESAIM: Control, Optimisation and Calculus of Variations 28 (2022), 37.
- [16] Tom Carroll, Xavier Massaneda, and Joaquim Ortega-Cerdà, An enhanced uncertainty principle for the Vaserstein distance, Bulletin of the London Mathematical Society 52 (2020), no. 6, 1158–1173.
- [17] Fabio Cavalletti and Sara Farinelli, Indeterminacy estimates and the size of nodal sets in singular spaces, Advances in Mathematics 389 (2021), 107919.
- [18] Thierry Champion, Luigi De Pascale, and Petri Juutinen, The -wasserstein distance: Local solutions and existence of optimal transport maps, SIAM Journal on Mathematical Analysis 40 (2008), no. 1, 1–20.
- [19] Yves Colin de Verdière, Magnetic interpretation of the nodal defect on graphs, Analysis & PDE 6 (2013), no. 5, 1235–1242.
- [20] Nicolò De Ponti and Sara Farinelli, Eigenfunctions and a lower bound on the wasserstein distance, arXiv preprint arXiv:2104.12097 (2021).
- [21] by same author, Indeterminacy estimates, eigenfunctions and lower bounds on wasserstein distances, Calculus of Variations and Partial Differential Equations 61 (2022), no. 4, 1–17.
- [22] Manuel Del Pino and Jean Dolbeault, Best constants for gagliardo–nirenberg inequalities and applications to nonlinear diffusions, Journal de Mathématiques Pures et Appliquées 81 (2002), no. 9, 847–875.
- [23] by same author, The optimal euclidean lp-sobolev logarithmic inequality, Journal of Functional Analysis 197 (2003), no. 1, 151–161.
- [24] Julie Delon, Julien Salomon, and Andrei Sobolevski, Fast transport optimization for monge costs on the circle, SIAM Journal on Applied Mathematics 70 (2010), no. 7, 2239–2258.
- [25] Qiang Du, Vance Faber, and Max Gunzburger, Centroidal Voronoi tessellations: Applications and algorithms, SIAM review 41 (1999), no. 4, 637–676.
- [26] Matthias Erbar, Dominik Forkert, Jan Maas, and Delio Mugnolo, Gradient flow formulation of diffusion equations in the Wasserstein space over a metric graph, arXiv preprint arXiv:2105.05677 (2021).
- [27] Lawrence C Evans and Ronald F Garzepy, Measure theory and fine properties of functions, Routledge, 2018.
- [28] Mikhail Feldman and Robert McCann, Monge’s transport problem on a Riemannian manifold, Transactions of the American Mathematical Society 354 (2002), no. 4, 1667–1697.
- [29] Wilfrid Gangbo and Robert J McCann, The geometry of optimal transportation, Acta Mathematica 177 (1996), no. 2, 113–161.
- [30] Enrico Giusti and Graham Hale Williams, Minimal surfaces and functions of bounded variation, vol. 80, Springer, 1984.
- [31] Sven Gnutzmann, Uzy Smilansky, and Joachim Weber, Nodal counting on quantum graphs, Waves in random media 14 (2003), no. 1, S61.
- [32] Matthias Hofmann, James B Kennedy, Delio Mugnolo, and Marvin Plümer, On pleijel’s nodal domain theorem for quantum graphs, Annales Henri Poincaré, Springer, 2021, pp. 1–30.
- [33] Grégoire Loeper, Uniqueness of the solution to the vlasov–poisson system with bounded density, Journal de mathématiques pures et appliquées 86 (2006), no. 1, 68–79.
- [34] Luca Lussardi, Mark A Peletier, and Matthias Röger, Variational analysis of a mesoscale model for bilayer membranes, Journal of Fixed Point Theory and Applications 15 (2014), no. 1, 217–240.
- [35] Jose Mazón, Julio D Rossi, and Julian Toledo, Optimal mass transport on metric graphs, SIAM Journal on Optimization 25 (2015), no. 3, 1609–1632.
- [36] Robert J McCann, Exact solutions to the transportation problem on the line, Proceedings of the Royal Society of London. Series A: Mathematical, Physical and Engineering Sciences 455 (1999), no. 1984, 1341–1380.
- [37] by same author, Polar factorization of maps on Riemannian manifolds, Geometric & Functional Analysis GAFA 11 (2001), no. 3, 589–608.
- [38] Quentin Mérigot, Filippo Santambrogio, and Clément Sarrazin, Non-asymptotic convergence bounds for wasserstein approximation using point clouds, Advances in Neural Information Processing Systems 34 (2021), 12810–12821.
- [39] Michele Miranda Jr, Functions of bounded variation on “good” metric spaces, Journal de mathématiques pures et appliquées 82 (2003), no. 8, 975–1004.
- [40] Mayukh Mukherjee, A sharp wasserstein uncertainty principle for laplace eigenfunctions, arXiv preprint arXiv:2103.11633 (2021).
- [41] Michael Novack, Ihsan Topaloglu, and Raghavendra Venkatraman, Least wasserstein distance between disjoint shapes with perimeter regularization, Journal of Functional Analysis 284 (2023), no. 1, 109732.
- [42] Mark A Peletier and Matthias Röger, Partial localization, lipid bilayers, and the elastica functional, Archive for rational mechanics and analysis 193 (2009), no. 3, 475–537.
- [43] Rémi Peyre, Comparison between w2 distance and norm, and localization of wasserstein distance, ESAIM: Control, Optimisation and Calculus of Variations 24 (2018), no. 4, 1489–1501.
- [44] Tapio Rajala and Karl-Theodor Sturm, Non-branching geodesics and optimal maps in strong -spaces, Calculus of Variations and Partial Differential Equations 50 (2014), no. 3, 831–846.
- [45] Amir Sagiv and Stefan Steinerberger, Transport and interface: an uncertainty principle for the Wasserstein distance, SIAM Journal on Mathematical Analysis 52 (2020), no. 3, 3039–3051.
- [46] T Salvemini, Sul calcolo degli indici di concordanza tra due caratteri quantitativi, Atti della VI Riunione della Soc. Ital. di Statistica (1943).
- [47] Filippo Santambrogio, Optimal transport for applied mathematicians, vol. 55, Springer, 2015.
- [48] Stefan Steinerberger, A metric sturm–liouville theory in two dimensions, Calculus of Variations and Partial Differential Equations 59 (2020), no. 1, 1–14.
- [49] by same author, Wasserstein distance, fourier series and applications, Monatshefte für Mathematik 194 (2021), no. 2, 305–338.
- [50] SS Vallender, Calculation of the Wasserstein distance between probability distributions on the line, Theory of Probability & Its Applications 18 (1974), no. 4, 784–786.
- [51] Cédric Villani, Topics in optimal transportation, no. 58, American Mathematical Soc., 2003.
- [52] Qinglan Xia and Bohan Zhou, The existence of minimizers for an isoperimetric problem with Wasserstein penalty term in unbounded domains, Advances in Calculus of Variations (2021).