| \theparentequation\theparentequation. |
Landau’s constant related to the classical zero free region of Riemann zeta function.
Your Document Title
Landau’s constant related to a zero free region of Riemann zeta function
1 Introduction
The Riemann zeta function, denoted as where , is a fundamental object in analytic number theory, with significant applications in fields such as matrix theory and physics. It is initially defined for by the series:
which converges absolutely in this region. However, for , the series diverges. To address this, admits an analytic continuation to the entire complex plane, except for a simple pole at . The continuation is expressed as:
where is the Gamma function.
The zeros of the Riemann zeta function are critical in understanding the distribution of prime numbers. These zeros are classified into trivial zeros, occurring at the negative even integers , and nontrivial zeros, which lie within the critical strip . The Riemann Hypothesis conjectures that all nontrivial zeros have a real part . For further proofs and theoretical background on the Riemann zeta function, one can refer to Apostol [Apo76].
To study the behavior of nontrivial zeros of the Riemann zeta function, the zero-free region of the Riemann zeta function was first established by de la Vallée Poussin [dlVP00] in 1899. The zero-free region is an area in the critical strip where the Riemann zeta function does not vanish. The classical zero-free region has the form:
where is a positive constant. In this region, .
Establishing such regions is crucial, as it directly influences the understanding of the distribution of prime numbers. The prime number counting function
counts the number of primes less than . Landau [vL08] proved that for any :
A smaller will give a larger zero-free region and a smaller error term in the prime number counting function. Efforts to enlarge the zero-free region have driven researchers to reduce the constant using various techniques. These refinements improve the approximation of the prime number counting function and yield deeper insights into the zeta function’s zeros. Table 1 summarizes key results in reducing the constant.
| Year | Author | |
|---|---|---|
| 1899 | de la Vallée Poussin [dlVP00] | 30.47 |
| 1962 | Rosser, Schoenfeld [SRS62] | 17.52 |
| 1970 | Stechkin [Ste70] | 9.65 |
| 1975 | Rosser, Schoenfeld [RS75] | 9.65 |
| 2002 | Ford [For02] | 8.46 |
| 2005 | Kadiri [Kad05] | 5.69 |
| 2022 | Mossinghoff, Trudgian, Yang [MTY22] | 5.56 |
All of this work has employed a very special type of trigonometric polynomial. Given a positive integer , let denotes the set of cosine polynomials:
with the following properties:
-
A.1
All the coefficients are nonnegative and real.
-
A.2
The coefficient .
-
A.3
for all real .
Then, the real valued functional is defined by:
Landau [vL08] demonstrated that for any , one can take:
in the classical zero-free region, ensuring in this region.
Naturally, the goal to enlarge the zero-free region and pursuits the smaller leads to the following problems.
Problem 1.1.
What is the exact value of
and
The problems to find the value of were studied by Westphal [Wes38], Stechkin [Ste70], Rosser and Schoenfeld [SRS62, RS75], French [Fre66], Kondrat’ev [Kon77, AK90], Reztsov [Rez86], Arestov [AK90, Are92], Mossinghoff and Trudgian [MT14]. Most of the works are dedicated to estimating the upper and lower bounds of . As of now, the best two-sided estimates for are:
The exact value of is known only for .
To determine the exact value of , French [Fre66] substituted and expressed every cosine polynomial in in the form:
which satisfies the condition for all . French classified the polynomial in two classes based on the global minimum point of . The first class is when and the second class is when . Then, French calculated the minimum value of can be attained in two different classes, the smaller number being the exact value of .
On the other hand, Arestov use the following properties of nonnegative trigonometric polynomials to evaluate the exact value of for . Firstly, he noticed that for any trigonometric polynomial , the Fejér inequality [PS78] holds:
| (1.1) |
Secondly, for any and positive number , one has . By using the homogeneity of and Fejér inequality, one can change the problem of finding to become:
| (1.2) |
where is defined as:
Arestov [Are92] used some inequalities of nonnegative trigonometric polynomials to find the exact value of on some specific intervals. This enabled him to calculate the exact value of for The values of for are summarized in Table 2.
| n | Author | |
|---|---|---|
| 2 | French [Fre66] | 53.1390720 |
| 3 | Arestov [Are92] | 36.9199911 |
| 4 | Arestov [Are92] | 34.8992259 |
| 5 | Arestov [Are92] | 34.8992259 |
| 6 | Arestov [Are92] | 34.8992259 |
The goal of this research is to revise the exact values of for and find the exact values of for . In Section 2, the exact values of and will be found by improving French’s method. Instead of classifying the polynomial by the location of the minimum point, the polynomial will be classified based on the location of its roots.
Sections 3 to Section 8 will be devoted to finding the exact values of for from 4 to 8. By applying the Fejér-Riesz theorem [Fej16], the problem of finding is transformed into an optimization problem in and then solved using optimization techniques. The techniques and general procedure will be described in Section 3, while the key constraints and result of the optimization problems will be summarized in Section 4 to Section 8. In the last two sections, the following theorems will be presented.
Theorem 1.1: The exact value of is
Theorem 1.2: The exact values of is
This work aims to advance our understanding of the zero-free regions of the Riemann zeta function, thereby contributing to the broader field of analytic number theory and its applications to prime number theory.
2 The exact value of and
2.1 Some properties of function .
This section is devoted to finding the exact values of and . Firstly, some useful properties of the function will be established. These properties will enable a focus on some special forms of polynomials to find the values of and .
One particularly useful property is the homogeneity of the function , which implies that for , the function satisfies . This property is advantageous because, instead of studying all polynomials , the focus can be narrowed to polynomials of the form
where by Fejér’s Inequality (Equation (1.1)).
To explore next property of , the following two theorems imply that one only need to consider the cosine polynomial with a minimum of 0 in order to find the exact value of .
Theorem 2.1.
Given
let be the minimum of when , then
Proof.
This can be proven easily by considering the integration below,
The equality holds if and only if is a constant function, which is impossible in the context of this discussion. This completes the proof. ∎
The next theorem states that given a polynomial with minimum , another polynomial with minimum 0 can always be found such that . This clearly implies , thus is not a candidate for the infimum.
Theorem 2.2.
Given with minimum , let
Then and
Proof.
To prove , note that by Theorem 2.1. Moreover, it holds that
Lastly,
This completes the proof.
∎
With the previous theorems, it is established that only cosine polynomials with a minimum of 0 need to be considered in the process of evaluating exact value of . The next step is to analyze the properties of the root of these cosine polynomials.
Theorem 2.3.
Given a non-negative cosine polynomial with minimum 0 , where
then must have at least one root in the interval , and it must satisfy one of the following:
-
a.
The root (or ).
-
b.
The root must have even order.
This will imply if (or ), then it must have even order.
Proof.
By substituting can be transformed into the polynomial form:
where the fact that is non-negative and has a minimum of zero implies is non-negative in the interval and has at least one root in this interval. If the root of lies within the interval , it must be of even order, as it also functions as a local minimum point for the function . In other words, only and can serve as the root in with odd order.
However, cannot serve as the root of . This is shown by contradiction. If has as its root, then can be expressed as
where is a nonnegative trigonometric polynomial with degree , this implies . This will never happen since
This completes the proof. ∎
Finally, to find the exact value of , it is enough to consider only cosine polynomials with at least one double root. Using a similar method in the proof of Theorem 2.2, it will be shown that given any cosine polynomial which does not have a double root, a polynomial with a double root can always be found such that . This implies is not a candidate for attaining infimum.
The exact formula of will be provided in Theorem 2.4, and subsequently, in Theorem 2.5, it will be shown that satisfies the rquire properties.
Theorem 2.4.
Given
where and is an -degree nonnegative trigonometric polynomial with minimum 0, then
-
a.
The polynomial if and only if .
-
b.
If , then
Proof.
First of all, one can easily see that both and satisfy the nonnegative condition. To prove the statement (a), note that
If , then all the coefficients of should also be nonnegative since for . Lastly, it is also easy to check , which implies .
Conversely, assume that . It will be shown that . Firstly, by Theorem 2.1, . The fact that implies
Moreover, for can be deduced by the fact for .
To prove the second statement, just note that for , it holds that
This implies
This completes the proof.
∎
To complete the discussion of this subsection, the final theorem will be proven, which shows the has at least one double root.
Theorem 2.5.
Given which does not have a double root, it is always possible to find another with at least one double root such that
Proof.
One can always use Theorem 2.2 to replace with a cosine polynomial that has at least one root. Thus, without loss of generality, only the cosine polynomial with at least a single root in the interval needs to be considered. By Theorem 2.3, the cosine polynomial must have the form
where is a -degree nonnegative trigonometric polynomial with minimum 0 and . Then, let
Theorem 2.4 implies that and . The last thing to prove is that has at least one double root. Let and transform to , that is . Then
where is nonnegative in the interval , and the minimum in this interval is 0 . The polynomial has a zero in the interval . If the zero is in , then it is a double zero. If the zero is , then has a double zero at . If the zero is implies , which implies , which is a contradiction. The proof is complete. ∎
As a summary, to find the exact value of , it is only necessary to consider the cosine polynomials in the following set.
Definition 2.1.
The set is the set containing all degree cosine polynomials
which satisfy the following three conditions:
-
B.1
The function is nonnegative and has a double root.
-
B.2
All the coefficients are nonnegative.
-
B.3
The coefficient .
By focusing on the special forms of polynomials and utilizing the properties discussed in the theorems above, the process of finding the exact values of and can be simplified.
2.2 Exact value of .
To find the exact value of , Theorem 2.5 and Definition 2.1 imply that it is only necessary to consider the cosine polynomial with double root. Moreover, the homogeneity of implies it is enough to consider cosine polynomial with the form
where . However, one still need to check when .
Theorem 2.6.
For , the polynomial
if and only if .
Proof.
The nonnegative property of is obvious. Expanding , we have
Then if and only if
Rearranging, we get
which simplifies to
This completes the proof. ∎
The next theorem presents the exact value of and the cosine polynomial such that .
Theorem 2.7.
The exact value of is
which can be obtained by considering
Proof.
By Theorem 2.6, only the polynomials in the following form need to be considered:
where . In this case,
thus
This function is continuous in the interval . Using Matlab to conduct a golden section search, the minimum is found to be 53.1390720 (see Figure 1),

which can be obtained by considering
This completes the proof. ∎
2.3 Exact value of .
This subsection will be devoted to finding the exact value of . To find the exact value of , Theorem 2.5 and Definition 2.1 imply that it is only necessary to consider the cosine polynomial with double root. Moreover, the homogeneity of implies it is enough to consider cosine polynomial with the form
where and .
Our next goal is to identify all the polynomials in this form that belong to .
Theorem 2.8.
For and , the cosine polynomial
belongs to if and only if
-
a.
, or
-
b.
and .
Proof.
To check that a cosine polynomial belongs to , we need to check all the conditions stated in Definition 2.1. It is obvious that for every and , the polynomial is nonnegative and has a double root. Next, expanding , we obtain
To ensure satisfies , consider the inequality:
Rearranging, one get
It is obvious that is positive. When , we have , thus the inequality holds. When , one needs to have
Thus, when , one has , which contradicts the assumption. When , one has
One can also check that when , we have and . This shows the polynomial is in . This completes the proof. ∎
Next, it will be demonstrated that in order to determine the exact value of , it suffices to consider degree 3 polynomials of the form
where . The same strategy as used in the proof of Theorem 2.2 will be applied here. Given a cosine polynomial in the form
where and , another polynomial
can be constructed and yields a better result, implying that . Consequently, is not a candidate for the infimum.
To establish this result, we first require some preliminary lemmas. Three of the following lemmas provide simple inequalities that will be used to compare the values of and . Readers may choose to skip ahead to Theorem 2.12 and return to these lemmas when the inequalities are needed. For a smoother reading experience, the proofs of Lemma 2.9, Lemma 2.10 and Lemma 2.11 are presented in the Appendix A.
Lemma 2.9.
Given four positive real numbers , if
then
Lemma 2.10.
Given five positive real numbers , if
then
Lemma 2.11.
Given four positive real numbers , then
equality holds when
The following theorem compares the value of and , and implies that we only need to consider the cosine polynomial in the form of
in order to find the exact value of .
Theorem 2.12.
Given a cosine polynomial in of the form
let
Then and
Proof.
When , it will be shown that increases as increases by proving for . Expanding , we have
thus
To show is positive, it is enough to prove
When , we have , and thus
This implies
and thus since we know that , , and .
For the case where , we want to prove that
If we write , where , then the statement we want to prove turns to
Using Matlab to conduct a golden section search (see Figure 2), one can check that for ,

The minimum point can be obtained when .
Moreover, one can also use the same method (see Figure 3) to check

The maximum point can be obtained when . Thus, by Lemma 2.9, we have
This completes the proof. ∎
Finally, the last theorem of this section presents the exact value of and identifies the cosine polynomial such that .
Theorem 2.13.
The exact value of is
which can be obtained by considering the cosine polynomial
Proof.
Theorem 2.8 implies that we only need to consider the cosine polynomial in the form
where satisfy one of the following:
-
a.
, or
-
b.
and .
Moreover, Theorem 2.12 implies that we need only consider the case where . As a result, the polynomial takes the form
where . Expanding , we obtain
In this case, we have
One can check that this function is continuous in the interval . Using Matlab to conduct a golden section search (see Figure 4), the minimum is 36.9199911, which can be obtained by considering the cosine polynomial

This completes the proof. ∎
3 Methodology
The Fejer-Riesz theorem was first employed by Kondrat’ev [Kon77] to find the upper bound of in his paper. This method was later employed by Mossinghoff and Trudgian [MT14] to determine the upper bound of for . The Fejer-Riesz theorem translates the problem of finding the exact value of into a minimization problem on , subject to certain conditions. The statement of the Fejer-Riesz theorem is presented as follows:
Theorem 3.1 (Fejer-Riesz theorem).
[Fej16] Let be a trigonometric polynomial with real coefficients, which is nonnegative for every real and . Then, there exist real numbers such that
Moreover, we also have
Now, given any cosine polynomial in ,
the Fejer-Riesz theorem states that we can find real numbers such that
with the following conditions:
for .
By observing that
the problem of finding the exact value of in Equation (1.2) is equivalent to the following minimization problem, which we call Problem .
Problem 3.1.
The optimization Problem is defined as
| : Minimize | |||
| subject to | |||
For Problem , we denote the subset of that satisfies all the conditions in the statement of the problem as . One can note that if is not empty, then it will be a closed set since
Moreover, the condition implies that is bounded, meaning is a compact set. Since all the functions , and are continuous, the existence of a global solution is guaranteed by the Weierstrass Extreme Value Theorem.
Theorem 3.2 (Weierstrass Extreme Value Theorem).
[Mun00] Every continuous function on a compact set attains its extreme values on that set.
Applying the Weierstrass Extreme Value Theorem to Problem guarantees the existence of a global minimum for on the set .
3.1 Karush-Kuhn-Tucker Method
In order to solve Problem , two classical approaches in mathematical optimization will be applied, which are Karush-Kuhn-Tucker conditions and penalty function. The Karush-Kuhn-Tucker conditions are the first derivative tests for a solution to be optimal in nonlinear programming. Given an optimization problem, we call it Problem .
Problem 3.2.
The optimization Problem is defined as
where are all continuous function from to .
For Problem , we denote the feasible regions as , which is defined as
To guarantee the set is nonempty, the Slater’s condition will be checked in advance.
Definition 3.1 (Slater’s condition).
[BSS06] The Problem is said to satisfy Slater’s condition if we can find a vector such that
The Karush-Kuhn-Tucker conditions are a set of requirements that must be satisfied by the optimal point of an optimization problem.
Theorem 3.3 (Karush-Kuhn-Tucker Necessary Conditions).
[BSS06] Let , and for . Consider Problem , which seeks to minimize subject to for and for . Suppose is a solution to this problem, and that and are all differentiable at . Furthermore, assume the gradients of the constraints, , are linearly independent for all . If solves Problem locally, there exist scalars for such that:
For the problem (Problem 3.1), since we can guarantee the existence of the optimal solution , this means we can find scalar such that:
3.2 Penalty Function
The second tool used is the penalty function, which transforms a constrained optimization problem into an unconstrained one. This is done by incorporating the constraints into the objective function through a penalty parameter that penalizes any violation of the constraints.
Consider Problem again. We can replace Problem with the following unconstrained problem.
Problem 3.3.
The optimization Problem is defined as
| Minimize | |||
| subject to |
For , let us denote
and
One can observe that when is a large positive number, any point that violates the conditions in Problem will give a large value, which causes .
The following theorem concludes this subsection, which states that solving Problem is equivalent to finding the value of
Theorem 3.4.
[BSS06] Consider the following problem:
where are continuous functions on . Suppose that the problem has a feasible solution, and let be a continuous function defined by
Furthermore, suppose that for each there exists a solution to the problem of minimizing , then
where . Furthermore, the limit of any convergent subsequence of is an optimal solution to the original problem, and as .
3.3 General Procedure
In this subsection, we describe a general procedure that combines the Karush-Kuhn-Tucker conditions and the penalty function to solve Problem when the solution exists. As the main problem of interest, Problem (Problem 3.1), is guaranteed to have an optimal solution by Theorem 3.2.
Let be the optimal solution of Problem (Problem 3.2). According to the Karush-Kuhn-Tucker conditions, it should satisfy the following three conditions:
-
1.
Feasibility. The point lies in the feasible region, which means for and for .
-
2.
Stationarity. The parameters can be found such that
-
3.
Complementary Slackness. The parameters should satisfy
Next, we describe the procedure to determine the exact value of . First, by Condition 3, Problem can be decomposed into several subproblems. Complementary slackness stipulates that for each inequality constraint , the corresponding Lagrange multiplier must satisfy . This means that for any optimal solution, either the constraint is active ( and can be nonzero) or inactive ( and ). By enumerating all possible combinations of active and inactive constraints, subproblems can be generated, with each combination treated as a separate case. For each subproblem, the active constraints are converted into equality constraints, while the inactive constraints are disregarded, with their corresponding Lagrange multipliers set to zero. Each subproblem is then solved individually. By comparing the solutions of all subproblems, the optimal solution that satisfies the original constraints and minimizes the objective function is identified.
In order to solve each subproblem, a penalty function method will be applied. For a subproblem where certain constraints are active and others are inactive, we construct a penalized objective function:
where denotes the set of active constraints, and is the penalty parameter. The equality constraints are always included in the penalty term. We then solve the unconstrained minimization problem:
using a gradient-based optimization method. Let , then will be the solution of the subproblem.
Next, we want to verify that the solution satisfies the stationarity condition (Condition 2) under some assumptions. By the optimality of , for every ,
By letting ,
thus if the limits in the equation exist, we can choose
in this case, the solution satisfies the stationarity condition.
After obtaining solutions for each subproblem using the penalty function method, the final step is to ensure that each solution satisfies the original constraints. We check if complies with the feasibility (Condition 1), including equality for and inequality for . If violates any constraint, it is considered as infeasible. Feasible solutions are then compared based on their objective function values, with the lowest value indicating the optimal solution. This process ensures that the selected solution not only meets all the constraints, but also minimizes the objective function effectively.
4 Exact value of .
In this chapter, we will focus on determining the exact value of , continuing from the methodology established in the previous section. From Equation (1.2), the value of is given by
where is defined as
To find the exact value of , we will employ the Karush-Kuhn-Tucker conditions along with the penalty function method to solve the optimization problem associated with .
Before solving the problem, it is crucial to restrict the range of to a smaller interval for computational efficiency and theoretical accuracy.
4.1 Revisit of Arestov and Kondrat’ev’s method.
In this subsection, we will show that
To prove this, we revisit the approach used by Arestov and Kondratev [AK90], which provides a set of key inequalities that give lower bounds. The following theorem gives a simple lower bound for .
Theorem 4.1.
[AK90] For , the functions for possess the following property
| (4.1) |
Proof.
Given a cosine polynomial with the following expression
By the nonnegativity of , one has , which implies
this implies . ∎
Subsequently, Arestov and Kondrat’ev employed a more sophisticated approach to establish a precise bound for . Given a real value function such that it is nonnegative on the interval . Then for any with the following expression
one could define a positive functional
If we write , then one will have
Let , then
When , this gives
By choosing different nonnegativefunction such that , one could obtain several lower bounds of More specifically, Arestov and Kondrat’ev [AK90] have employed the following functions
to find another two useful lower bounds of .
Theorem 4.2.
[AK90] For , the functions for possess the following properties:
-
C.1
-
C.2
These inequalities will serve as a foundation to the following theorem. The following theorem shows that the exact value of is the infimum of the function over a specific interval.
Theorem 4.3.
The exact value of is
Proof.
Since the set of cosine polynomials , one have . However, by Theorem 4.1 and Theorem 4.2, we have
| (4.2) | ||||
| (4.3) |
for Given function with the form
where are constant. Taking the derivative, one has
This implies when the function is decreasing on the interval . On the other hand, when , the function increasing on the interval and decreasing on the interval . Apply this on the function and , we found out is a decreasing function on the interval . However, the function is increasing on and is decreasing on the interval .
Now, given any with , one has
Similarly, for any with , one could obtain
This completes the proof. ∎
4.2 Exact value of .
By Fejer-Reisz theorem, the problem of finding the for can be formalized as the minimization problem in as:
Problem 4.1.
Consider the optimization problem defined as follows:
| : Minimize | |||
| subject to | |||
Define as the optimal value of the objective function for a given :
However, instead of considering Problem with five constraints, we will consider the following problem with two constraints.
Problem 4.2.
Consider the optimization problem defined as follows:
| Minimize | |||
| subject to | |||
Define as the optimal value of the objective function for a given :
Since the feasible region of problem is the subset of the feasible region of problem , this implies
If the optimal point of problem also satisfies the condition , then the optimal point will lie inside the feasible region of problem . In this case,
Theorem 4.4.
The exact value of is given by:
The exact solution corresponding to this infimum could be obtained at the point
It corresponds to the following polynomial in ,
where
Proof.
Then, a Matlab-based algorithm is employed to compute the . The algorithm utilizes the Newton-Raphson method in conjunction with a penalty function approach to iteratively find the minimizer of the penalized objective function. The detailed Matlab implementation is provided in Appendix B. The Figure 5 shows the ratio .

Then, the infimum of the ratio is determined to be , which could be achieved at several points, such as
The polynomial corresponding to this solution is,
where
One could see that the point also lies in the feasible region of . This implies that the optimal solution of problem is also the optimal solution of problem and thus agrees with the value of . By the relationship
one can conclude
This completes the proof. ∎
5 Exact value of .
In this section, we aim to determine the exact value of , following a similar method used in the previous section. From Equation (1.2), the value of is given by
where is defined as
5.1 Exact value of .
First, we will restrict the range of to a smaller interval for computational efficiency and theoretical accuracy as illustrated in the last section. The following theorem states that in order to find the exact value of , one only needs to find the exact value of for .
Theorem 5.1.
The exact Value of is
Proof.
Since the set of cosine polynomials , one have . However, by Theorem 4.1 and Theorem 4.2, we have
| (5.1) | ||||
| (5.2) |
for Given function with the form
where are constant. Taking the derivative, one have
This implies when the function is decreasing on the interval . On the other hand, when , the function increasing on the interval and decreasing on the interval . Apply this on the function and , we found out is a decreasing function on the interval . However, the function is increasing on and is decreasing on the interval .
Now, given any with , one has
Similarly, for any with , one could obtain
This completes the proof. ∎
By Fejer-Reisz theorem, the problem of finding the for can be formalized as the minimization problem in as:
Problem 5.1.
Consider the optimization problem defined as follows:
| : Minimize | |||
| subject to | |||
Define as the optimal value of the objective function for a given :
However, instead of considering Problem with six constraints, we will consider the following problem with three constraints.
Problem 5.2.
Consider the optimization problem defined as follows:
| Minimize | |||
| subject to | |||
Define as the optimal value of the objective function for a given :
Since the feasible region of problem is the subset of the feasible region of problem , this implies
If the optimal point of problem also satisfies the condition , then the optimal point will lie inside the feasible region of problem . In this case,
Theorem 5.2.
The exact value of can be expressed as:
The exact solution corresponding to this infimum could be obtained at the point
The polynomial corresponding to this solution is,
where
Proof.
Fix an , we would first like to establish the numerical solution of the optimization problem . By applying the Karush-Kuhn-Tucker conditions (Theorem 3.3), if a point solves Problem globally, there exist scalars and such that the following conditions hold:
| (5.3) | ||||
| (5.4) | ||||
| (5.5) |
By the Equation (5.4), the problem could be divided into the following two subproblems, we call them problem and respectively. We will use and to denote the solutions of these subproblems respectively. The first subcase is when , the minimization problem corresponding to this subcase is
| : Minimize | |||
| subject to | |||
The second subcase is when , the minimization problem corresponding to this subcase is
| : Minimize | |||
| subject to | |||
Then, a Matlab-based algorithm is employed to compute the for . The algorithm utilizes the Newton-Raphson method in conjunction with a penalty function approach to iteratively find the minimizer of the penalized objective function. The detailed Matlab implementation is provided in Appendix B.
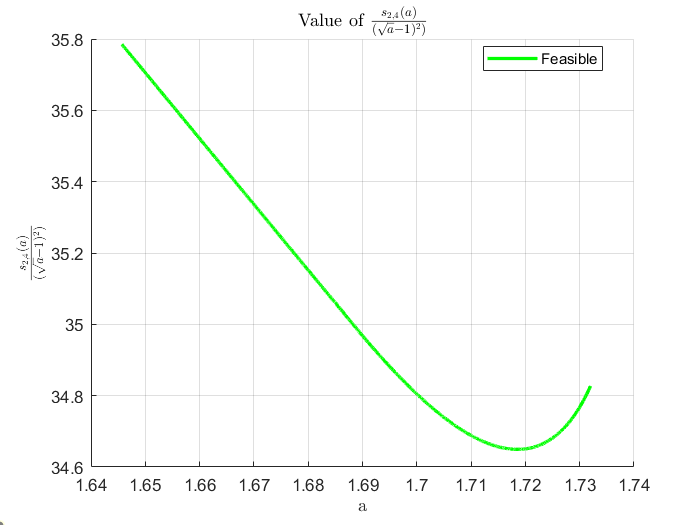
For each subproblem , a graph (see Figure 6 and Figure 7) is generated plotting the ratio against . In these graphs, we use different colors to represent the feasible and infeasible solutions to the original problem . The red points are used to indicate infeasible solutions that are the solutions of subproblems but do not satisfy all the constraints of problem . On the other hand, the green points represent feasible solutions that satisfy all constraints.


Then, the value of could be obtained by comparing the optimal values of the subproblems and (only consider the value feasible to the problem ). The Figure 8 shows the ratio .

Then, the infimum of the ratio is determined to be , which could be achieved at several points, such as
The polynomial corresponding to this solution is,
where
One could see that this point also lies in the feasible region of . This implies that the optimal solution of problem is also the optimal solution of problem and thus agrees with the value of . By the relationship
one can conclude
This completes the proof.
∎
6 Exact value of .
In this section, we will determine the exact value of . From Equation (1.2), we have
where is defined as
6.1 Exact value of .
In order to find the exact value of , we will use the Karush-Kuhn-Tucker conditions and the penalty function method to solve the optimization problem . However, before proceeding, we first restrict the range of a to a smaller interval.
By a similar proof in Theorem 5.1, we have the following theorem.
Theorem 6.1.
The exact value of could be obtained by
Proof.
Since the set of cosine polynomials , one have 34.8992259. However, by Theorem 4.1 and Theorem 4.2 , we have
for . Given function with the form
where are constant. Taking the derivative, one have
This implies when the function is decreasing on the interval . On the other hand, when , the function increasing on the interval and decreasing on the interval . Apply this on the function and , we found out is a decreasing function on the interval . However, the function is increasing on and is decreasing on the interval . At the same time, the function is increasing on the interval . Now, given any with , one has
Similarly, for any with , one could obtain
Finally, for any with , one could obtain
This completes the proof.
∎
By Fejer-Reisz theorem theorem, the problem of finding the for can be formalized as the minimization problem in as:
Problem 6.1.
Consider the optimization problem defined as follows:
| : Minimize | |||
| subject to | |||
Define as the optimal value of the objective function for a given :
However, instead of consider Problem with seven constraints, we will consider following problem with four constraints.
Problem 6.2.
Consider the optimization problem defined as follows:
| Minimize | |||
| subject to | |||
Define as the optimal value of the objective function for a given :
Since the feasible region of problem is the subset of the feasible region of problem , this implies
If the optimal point of problem also satisfies the condition , then the optimal point will lie inside the feasible region of problem . In this case,
Theorem 6.2.
The exact value of can be expressed as:
The exact solution corresponding to this infimum could be obtained at the point
The polynomial corresponding to this solution is,
where
Proof.
Fix an ,we would first like to establish the numerical solution of the optimization problem . By applying the Karush-Kuhn-Tucker conditions (Theorem 3.3), if a point solves Problem globally, there exist scalars and such that
| (6.1) | |||||
| (6.2) | |||||
| (6.3) | |||||
By the Equation (6.2), the problem could be divided into following four subproblems, we call them problem and respectively. We will use and to denote the solutions of these subproblems respecively. The first subcase is when , the minimization problem corresponding to this subcase is
| : Minimize | |||
| subject to | |||
The second subcase is when , the minimization problem corresponding to this subcase is
| : Minimize | |||
| subject to | |||
The third subcase is when , the minimization problem corresponding to this subcase is
| : Minimize | |||
| subject to | |||
The fourth subcase is when , the minimization problem corresponding to this subcase is
| : Minimize | |||
| subject to | |||
Then, a Matlab-based algorithm is employed to compute the for . The algorithm employs the Newton-Raphson method, combined with a penalty function approach to iteratively minimize the penalized objective function (see Appendix B for the full Matlab implementation).
For each subproblem , a graph (see Figure9, Figure10, Figure11 and Figure12) is generated plotting the ratio against . In these graphs, different colors are used to distinguish between feasible and infeasible solutions to the original problem . Red points indicate infeasible solutions, which solve subproblems but fail to meet all the constraints, while green points represent feasible solutions that satisfy all constraints.




Among all feasible solutions for each , is identified as the minimum value of all that are feasible to the problem . Figure 13 shows the graph plotting the ratio of the function .

Then, the infimum of the ratio is determined to be , achieved at a specific point in . This point is given by
The polynomial corresponding to this point is,
where
One could see that this point also lies in the feasible region of . This implies that the optimal solution of problem is also the optimal solution of problem and thus agrees with the value of . By the relationship
one can conclude
This completes the proof.
∎
7 Exact value of .
This section will be devoted to find the exact value of . First of all, by Equation (1.2), we have
where
7.1 Exact value of .
In order to find the exact value of , we will use the Karush-Kuhn-Tucker conditions and the penalty function method to solve the optimization problem . Before proceeding, we first restrict the range of a to a smaller interval.
By the same proof in Theorem 6.1, we have the following theorem.
Theorem 7.1.
The exact value of could be obtained by
By Fejer-Reisz theorem theorem, the problem of finding the for can be formalised as the following minimization problem in .
Problem 7.1.
Consider the optimization problem defined as follows:
| : Minimize | |||
| subject to | |||
Define as the optimal value of the objective function for a given :
However, instead of consider Problem with eight constraints, we will consider following problem with four constraints.
Problem 7.2.
Consider the optimization problem defined as follows:
| : Minimize | |||
| subject to | |||
Define as the optimal value of the objective function for a given :
Since the feasible region of problem is the subset of the feasible region of problem , this implies
If the optimal point of problem also satisfies the condition , then the optimal point will lie inside the feasible region of problem . In this case,
Theorem 7.2.
The exact value of can be expressed as:
The exact solution corresponding to this infimum could be obtained at the point
The polynomial corresponding to this solution is,
where
Proof.
Fix an , we would first like to establish the numerical solution of the optimization problem . By applying the Karush-Kuhn-Tucker conditions (Theorem 3.3), if a point solves Problem globally, there exist scalars and such that
| (7.1) | |||||
| (7.2) | |||||
| (7.3) | |||||
By the Equation (7.2), the problem could be divided into the following four subproblems, we call them problem and respectively. We will use and to denote the solutions of these subproblems respectively. The first subcase is when , the minimization problem corresponding to this subcase is
| : Minimize | |||
| subject to | |||
The second subcase is when , the minimization problem corresponding to this subcase is
| : Minimize | |||
| subject to | |||
The third subcase is when , the minimization problem corresponding to this subcase is
| : Minimize | |||
| subject to | |||
The fourth subcase is when , the minimization problem corresponding to this subcase is
| : Minimize | |||
| subject to | |||
By penalty function method (Theorem 3.4), for , we have
where
A Matlab-based algorithm is subsequently used to calculate for , by adopting the Newton-Raphson method in conjunction with a penalty function technique to iteratively find the minimizer of the penalized objective function (see Appendix B for the detailed Matlab implementation).
For each subproblem , a graph (Figure14, Figure15, Figure16 and Figure17) is generated plotting the ratio against . In these graphs, different colors are used to show feasible and infeasible solutions to the original problem . Red points indicate infeasible solutions that solve the subproblems but do not meet all constraints of . On the other hand, green points represent feasible solutions that satisfy all the constraints.



Among all feasible solutions for each , is identified as the minimum value of all that are feasible to the problem . Figure 18 shows the graph plotting the ratio of the function .

Then, the infimum of the ratio is determined to be , achieved at a specific point in . This point is given by
The polynomial corresponding to this solution is,
where
One could see that this point also lies in the feasible region of . This implies that the optimal solution of problem is also the optimal solution of problem and thus agrees with the value of . By the relationship
one can conclude
This completes the proof. ∎
8 Exact value of .
In this section, we aim to determine the exact value of , following the same approach as in the previous sections. From Equation (1.2), the value of is given by
where
8.1 Exact value of .
In order to find the exact value of , we will use the Karush-Kuhn-Tucker conditions and the penalty function method to solve the optimization problem . To begin, we will narrow the range of a to a smaller interval.
By a similar proof in Theorem 6.1, we have the following theorem.
Theorem 8.1.
The exact value of could be obtained by
Proof.
Since the set of cosine polynomials , one have . However, by Theorem 4.1 and Theorem 4.2, we have
| (8.1) | ||||
| (8.2) | ||||
| (8.3) |
for Given function with the form
where are constant. Taking the derivative, one has
This implies when the function is decreasing on the interval . On the other hand, when , the function increasing on the interval and decreasing on the interval . Apply this on the function and , we found out is a decreasing function on the interval . However, the function is increasing on and is decreasing on the interval . On the same time the function is increasing on the interval .
Now, given any with , one has
Similarly, for any with , one could obtain
Finally, for any with , one could obtain
This completes the proof. ∎
By Fejer-Reisz theorem, the problem of finding the for can be formalized as the minimization problem in as:
Problem 8.1.
Consider the optimization problem defined as follows:
| : Minimize | |||
| subject to | |||
Define as the optimal value of the objective function for a given :
However, instead of considering Problem with nine constraints, we will consider the following problem with four constraints.
Problem 8.2.
Consider the optimization problem defined as follows:
| : Minimize | |||
| subject to | |||
Define as the optimal value of the objective function for a given :
Since the feasible region of problem is the subset of the feasible region of problem , this implies
If the optimal point of problem also satisfies the condition and , then the optimal point will lie inside the feasible region of problem . This implies it will also be the solution of problem . In this case,
Theorem 8.2.
The exact value of can be expressed as:
The exact solution corresponding to this infimum could be obtained at the point
The polynomial corresponding to this solution is,
where
Proof.
Fix an , we would first like to establish the numerical solution of the optimization problem . By applying the Karush-Kuhn-Tucker conditions (Theorem 3.3), if a point solves Problem globally, there exist scalars such that
| (8.4) | |||||
| (8.5) | |||||
| (8.6) | |||||
By the Equation (8.5), the problem could be divided into the following four subproblems, we call them problem and respectively. We will use and to denote the solutions of these subproblems respectively. The first subcase is when , the minimization problem corresponding to this subcase is
| : Minimize | |||
| subject to | |||
The second subcase is when , the minimization problem corresponding to this subcase is
| : Minimize | |||
| subject to | |||
The third subcase is when , the minimization problem corresponding to this subcase is
| : Minimize | |||
| subject to | |||
The fourth subcase is when , the minimization problem corresponding to this subcase is
| : Minimize | |||
| subject to | |||
Then, a Matlab-based algorithm is employed to compute the for , through Newton-Raphson method and penalty function approach.
For each subproblem , a graph (Figure 19, Figure 20, Figure 21 and Figure 22) is generated plotting the ratio against . Colors are utilized in the graphs to differentiate between feasible and infeasible solutions for the original problem . Red points signify infeasible solutions that resolve subproblems but violate certain constraints, while green points represent feasible solutions that adhere to all constraints.




Among all feasible solutions for each , is identified as the minimum value of all that are feasible to the problem . The following graph (Figure 23) is generated plotting the ratio of the function .

Then, the infimum of the ratio is determined to be , achieved at
The polynomial corresponding to this solution is,
where
One could see that this point also lies in the feasible region of . This implies that the optimal solution of problem is also the optimal solution of problem and thus agrees with the value of . By the relationship
one can conclude
This completes the proof.
∎
Acknowledgements
The work is supported by the Xiamen University Malaysia Research Fund (XMUMRF/2021-C8/IMAT/0017).
This work continues the author’s undergraduate thesis, which was supervised by Prof. Dr. Teo Lee Peng at Xiamen University Malaysia. The author expresses sincere gratitude for her guidance, which lasted approximately 18 months. He appreciates all the knowledge and qualities he learned from her. Additionally, the author would like to thank the Department of Mathematics and Applied Mathematics at Xiamen University Malaysia for providing a quality education.
Last but not least, the support from family members, his partner, and every teacher was the only reason the author was able to overcome all hardships and turn professional.
Appendix A Proof of the lemma in Section 2.3.
Lemma A.1 (Lemma 2.9).
Given four positive real numbers , if
then
Proof.
Let , then , which implies
This completes the proof. ∎
Lemma A.2 (Lemma 2.10).
Given five positive real numbers , if
then
Proof.
This is just an implication of Lemma A.1. Without loss of generality, assume that , then
This completes the proof. ∎
Lemma A.3 (Lemma 2.11).
Given four positive real numbers , then
equality holds when
Proof.
Since both sides of the inequality are positive, it is enough to prove
Simplifying, we get
The arithmetic-geometric mean inequality implies the inequality above is true, and equality holds when . ∎
Appendix B Matlab Implementation for Computing
This appendix provides the Matlab code utilized to solve the optimization problem for determining the exact value of . The code employs the Newton-Raphson method in conjunction with a penalty function approach to iteratively find the minimizer of the penalized objective function. The code could be modified to solve the problem , and for .
References
- [AK90] Vitalii V. Arestov and V. P. Kondrat’ev. Certain extremal problem for nonnegative trigonometric polynomials. Mathematical notes of the Academy of Sciences of the USSR, 47:10–20, 1990.
- [Apo76] Tom M. Apostol. The functions and . In Introduction to Analytic Number Theory, Undergraduate Texts in Mathematics, pages 249–277. Springer-Verlag, New York-Heidelberg, 1976.
- [Are92] V. V. Arestov. On an extremal problem for nonnegative trigonometric polynomials. Trudy Inst. Math. Mech. Ukr. Acad. Nauk, 1:50–70, 1992. (in Russian).
- [BSS06] Mokhtar S. Bazaraa, Hanif D. Sherali, and C. M. Shetty. Nonlinear programming. Wiley-Interscience [John Wiley & Sons], Hoboken, NJ, third edition, 2006. Theory and algorithms.
- [dlVP00] C.-J. de la Vallée Poussin. Sur la fonction de riemann et le nombres des nombres premiers inférieurs à une limite donnée. Mém. Couronnés et Autres Mém. Publ. Acad. Roy. Sci. des Lettres Beaux-Arts Belg., 59:1–74, 1899–1900.
- [Fej16] L. Fejér. Über trigonometrische polynome. Journal für die reine und angewandte Mathematik, 146:53–82, 1916.
- [For02] Kevin Ford. Zero-free regions for the Riemann zeta function, pages 25–56. A K Peters, Natick, MA, 2002.
- [Fre66] S. H. French. Trigonometric polynomials in prime number theory. Illinois J. Math., 10:240–248, 1966.
- [Kad05] Habiba Kadiri. An explicit zero-free region for the dirichlet l-functions. arXiv: Number Theory, 2005.
- [Kon77] V. P. Kondrat’ev. Some extremal properties of positive trigonometric polynomials. Mathematical notes of the Academy of Sciences of the USSR, 22:696–698, 1977.
- [MT14] Michael J. Mossinghoff and Tim Trudgian. Nonnegative trigonometric polynomials and a zero-free region for the riemann zeta-function. Journal of Number Theory, 157:329–349, 2014.
- [MTY22] Michael J. Mossinghoff, Tim Trudgian, and Andrew Yang. Explicit zero-free regions for the riemann zeta-function. Research in Number Theory, 2022.
- [Mun00] James R. Munkres. Topology. Prentice Hall, Inc., Upper Saddle River, NJ, second edition, 2000.
- [PS78] G. Pólya and G. Szegő. Problems and Theorems in Analysis, volume 2. Nauka, Moscow, 1978.
- [Rez86] Andrew V. Reztsov. Some extremal properties of nonnegative trigonometric polynomials. Mathematical notes of the Academy of Sciences of the USSR, 39:133–137, 1986.
- [RS75] J. Barkley Rosser and Lowell Schoenfeld. Sharper bounds for the chebyshev functions and . Mathematics of Computation, 29:243–269, 1975.
- [SRS62] D. S., J. Barkley Rosser, and Lowell Schoenfeld. Approximate formulas for some functions of prime numbers. Illinois Journal of Mathematics, 6:64–94, 1962.
- [Ste70] S. B. Stechkin. Zeros of the riemann zeta-function. Mathematical Notes of the Academy of Sciences of the USSR, 8(4):706–711, 1970.
- [vL08] Edmund von Landau. Beiträge zur analytischen zahlentheorie. Rendiconti del Circolo Matematico di Palermo (1884-1940), 26:169–302, 1908.
- [Wes38] H. Westphal. Über die nullstellen der riemannschen zetafunction im kritischen streifen. Schriften des Math. Seminars und des Instituts für angewandte Math. der Universität Berlin, 4:1–31, 1938.