Koopman-type inverse operator for linear non-minimum phase systems with disturbances*
Abstract
In this paper, a novel Koopman-type inverse operator for linear time-invariant non-minimum phase systems with stochastic disturbances is proposed. This operator employs functions of the desired output to directly calculate the input. Furthermore, it can be applied as a data-driven approach for systems with unknown parameters yet a known relative degree, which is a departure from the majority of existing data-driven methods that are only applicable to minimum phase systems. Based on this foundation, we use the Monte Carlo approach to develop an improved Koopman-type method for addressing the issue of inaccurate parameter estimation in data-driven systems with large disturbances. The simulation results justify the tracking accuracy of Koopman-type operator.
I INTRODUCTION
Numerous studies have demonstrated that output tracking for non-minimum phase (NMP) systems poses more significant challenges than minimum phase (MP) systems. A system is considered to have non-minimum phase (or possess unstable zeros in the linear case) if there exists a (nonlinear) state feedback capable of maintaining the system output at an identical zero level, while simultaneously causing the internal dynamics to become unstable (Isidori and Alberto, 1985). For linear systems, the inverse of the system will make the unstable zeros of the original system transfer function become the poles, which cause the instability of the inverse (Butterworth et al., 2018).
Various approaches have been proposed to tackle the difficulties in NPM systems, including decomposing the system into external and internal dynamics and solving for the internal dynamics (Devasia et al., 1996; Devasia and PadenFrom, 1998; Estrada, 2021). Berget and Tomas (2020) proposed a method for constructing a new output that eliminates the unstable part of the zero dynamics, while Zundert et al. (2019) have decomposed NMP systems into a stable part and an unstable part for separate control. Ma et al. (2020) solved the problem of random perturbations in NMP systems by using two cost functions that possess the dual property. However, one of the main disadvantages of model-based control methods is their reliance on accurate models of the systems, which can be difficult and time-consuming to develop and validate for complex NMP systems.
In recent years, data-driven approaches have garnered attention for their ability to address the challenge of obtaining accurate models for model-based control strategies. Among the classic methods for non-minimum phase systems are virtual reference feedback tuning (VRFT) (Campi et al., 2002) and correlation-based tuning (CBT) (Van Heusden et al., 2011). However, CBT and VRFT require a comprehensive dataset to ensure model accuracy and may rely on the selection of certain empirical parameters, as noted by Rallo et al. (2016). To overcome these limitations, Suresh Kumar et al. (2022) developed a data-driven control method that integrates internal model control and VRFT and designed a generalizable methodology for data-driven identification of nonlinear dynamics based on the Koopman operator. Markovsky et al. (2022) proposed and solved the data-driven dynamic interpolation and approximation problem. However, most data-driven NMP control methods often require large amounts of data for training, and their applicability conditions and control accuracy have not been mathematically proven. Mamakoukas et al. (2021) designed a generalizable methodology for data-driven identification of nonlinear dynamics based on the Koopman operator.
In this paper, we propose a data-driven method that requires very few parameters and training data and provide a proof for the tracking accuracy. For systems without disturbances, only a small period of input-output data is needed to determine the parameters of our method.
The Koopman method, initially introduced by Koopman (1931), has proven to be a valuable mathematical tool in transforming complex nonlinear systems into higher-dimensional linear systems. This transformation enables the application of established linear system theory to control nonlinear systems. In recent years, the Koopman method has gained significant attention in various fields, including cybernetics and machine learning. Mauroy et al. (2021) introduced the use of Koopman operators in control systems. Mamakoukas et al. (2020) demonstrated the effectiveness of the Koopman operator for a robotic system at the experimental level. Additionally, Klus et al. (2020) presented an application of the Koopman operator in data-driven methods, and Leon and Devasia (2022) proposed a Koopman-type data-driven approach to control linear MP systems. Further research on the Koopman method holds the potential to revolutionize the field of nonlinear control systems.
The Koopman method has been widely studied in control systems, with research falling into two main categories: selecting eigenfunctions of the Koopman operator experimentally and obtaining desired coefficients using machine learning methods, or introducing a Koopman method under an MP system and proving its applicability and effectiveness. However, there is currently no proof of the practicality of the Koopman method for NMP systems. In this paper, we propose a Koopman-type control method for linear NMP systems with stochastic disturbances and prove its applicability conditions and tracking effects. The contributions of this paper are twofold: first, to the best of our knowledge, this paper is the first to use the Koopman method for the control of linear NMP systems and provide a complete proof; second, we demonstrate that our Koopman-type operator is still applicable for systems with random perturbations.
The remainder of the paper is organized as follows, the introduction of basic notation and the Koopman method is in Section II, the problem of NMP system control is in Section III, the Koopman-type method is proposed in Section IV with the theoretical analysis and the demonstration of tracking error. Section V includes simulation results justifies the tracking accuracy theorem presented in Chapter IV. A brief conclusion is in Section IV.
II PRELIMINARIES
A. Notation
Throughout this paper, let denotes the set of real numbers, denotes the set of matrix, and denotes the set of positive integers. For vector , , is the norm, dim() is the dimension of vector , is the inner product, . For matrix , is the matrix Frobenius norm, is the transpose of matrix , is the Moore-Penrose pseudoinverse of matrix . is a uniform distribution on interval for . For any matrix , where are random variables, then is the mathematical expectation of matrix . is the r-th derivative of respect to . B. Koopman method
Consider a (Banach) space of observables . The Koopman operator associated with the map is defined through the composition (Mauroy et al., 2020)
| (1) |
is Koopman operator which convert nonlinear systems to finite or infinite dimensional linear systems by decomposition of eigenequations and eigenvalues of and treat the nonlinear system as a higher order linear system.
The conventional Koopman method necessitates the identification of specific observables, such that they constitute a linear system. Subsequently, the linear system composed of these observables is analyzed to derive the control strategy for the linear system. The final step involves solving the inverse of the observables to obtain the desired parameters of the original system, such as the input function of the system. A noteworthy concept inspired by the Koopman approach is the potential to directly and linearly acquire the desired parameters through observables. A valuable idea inspired by Yan and Devasia (2022) is along the lines of the Koopman approach is the possibility of getting the parameters we want directly and linearly through observables. This modified Koopman method we call Koopman-type method.
III PROBLEM STATEMENT
Consider a non-minimum phase (NMP) stochastic linear time-invariant (LTI) system defined by
| (2) | ||||
Where states , outpute , and are stochastic disturbance functions, , , and . Assumption 1: , are bounded, i.e. and
Perform Laplace transform on (1),
| (3) | ||||
Write the first part of (3) in the form
| (4) | ||||
Assumption 2: The relative degree is known and the exact value of matrix are unknown. Assumption 3: The polynomial in the numerator of (4) has roots with real parts greater than zero but no roots with real parts equal to zero, while the roots of the denominator polynomial have all real parts less than zero.
Take , , , we call the internal states, where is the i-th element in . Using linear transformations the same as in Hendricks et al. (2008), the system can be written as
| (5) | ||||
Where
| (6) | |||
and
| (7) | ||||
Denote as the desired output, the task of this paper is to find a Koopman-type operator to calculate input directly from such that under this input, the actual output and differ by an acceptable error as time grows.
Assumption 1
is r-order continuously differentiable and there is , for any .
IV MAIN RESULTS
In this section, we describe the Koopman-type operator in detail. In part A, we present the specific formulation of the Koopman-type method and conduct a theoretical analysis of its tracking accuracy. In part B, we introduce a data-driven approach for determining the parameters required by the Koopman-type method. In part C, we designed an improved Koopman-type method by incorporating the Monte Carlo technique to improve the accuracy of parameters estimation in data-driven processes for systems with large disturbances.
A. Koopman-type operator and its performance analysis
Definition 1 Koopman-type operator
| (8) | ||||
Where is pure time delay. Take be a column vector containing every function in and , we define the Koopman-type operator in the form
| (9) |
Where is a constant column vector with dimension . Remark 1: is an undetermined parameter of the Koopman-type operator, for different systems we need to determine different to improve the accuracy of tracking. Theorem 1: There exists , for any , there exist , and , if , and , then from the Koopman-type operator, the output of system (1) satisfies
| (10) |
for large enough t.
Proof By the linear variable substitution of , Zou and Devasia (1999) , the second equation of system (3) can be written as
| (11) |
Where
| (12) |
Where all eigenvalues of , have negative (positive) real part. Without of lose generality, assume is directly this form. From Devasia (1996), the unique solution of the second equation in system (3) with the assumption for given is
| (13) |
Where
| (14) |
Lemma 1: There exists positive scalars such that
| (15) |
where is calcullated in (13), and
| (16) |
Proof The eigenvalues of and have negative real parts so there exists postive scalars , , , , , such that, see Desoer and Vidyasagar (2009)
| (17) | ||||
Then
Take , ,
By the definition of integration, we can write the integral as partial sum
| (18) | ||||
For any , we can find small enough , such that for , then
| (19) | ||||
Take
| (20) | ||||
Then
| (21) | ||||
For some initial state , under inpute ,we have, the outpute can be strictly equal to , then
| (22) | ||||
Assume the true system has initial states , under the outpute , take
| (23) | ||||
Then
The true output
| (24) |
Take small enough and such that and
B. Data-driven pseudoinverse approach for Koopman-
type operator parameter optimization design
Theorem 1 illustrates that for the system with disturbance, if a suitable can be found, then our Koopman-type operator can control this system with error depending on the disturbances. In this part we will show how to find by data-driven pseudoinverse method. Using every function in as the input to the system and measuring the output of the system. Denote the output vector by
| (25) | ||||
Remark 2: For different input functions, , are same and should be large enough to reduce the effect of the initial dynamic. Take
| (26) |
| (27) |
We calculate K by minimize
| (28) |
and the solution to this optimal problem can be written in exact form
| (29) |
C. Improved Koopman-type method to handle large
disturbances
Monte Carlo methods tend to perform well in dealing with stochastic problems. For systems with large perturbations, the parameters of the Koopman-type operator obtained by the data-driven method may be very inaccurate, this section we will prove the errors in the data-driven process can be reduced using Monte Carlo methods. Theorem 2: Assume is the expection of the output matrix, and are the output matrix obtained from system (5), take . For given , if , and for any then there exists , with probability , .
Proof Denote as the actual output of system (1)
| (30) | ||||
The second to the last inequality hold by Cauchy Inequality. Take
| (31) |
Then for all , by Chebyshev’s Inequality, with probablity , where s is the number of elements in matrix
| (32) | ||||
Take Remark 3 According to this theorem, for systems subjected to substantial disturbances, an effective strategy to mitigate the error and attain an accurate estimation of is to employ averaging over multiple measurements.
V SIMULATION RESULTS
In this section, we present a linear NMP system and validate the results in Section IV through simulation. In Part A, the system’s parameters and the simulation methodology are designed. In Part B, data-driven approach in Section IV, Part B is applied to determine Koopman-type operator’s parameters. Then the function provided by the Koopman operator is applied to the system to confirm the tracking accuracy demonstrated in Section IV, Part A. Lastly, in Part C, we corroborate that the Improved Koopman-type method proposed in Section IV, Part C is more effective in systems with substantial perturbations. A. Simulation system and parameter design
The simulation system we choose is
| (33) | ||||
Where is a matrix. And are bounded disturbances, heir characteristics will be determined according to the specific simulation requirements. The system is non-minimum phase, and it has relative degree 2. The initial stste at is set to .
The function being tracked is set to . We take in Theorem 1. The output vector are generated by as the input of the system for . And , are generated by , . All these output vector has for in (19). Parameters of the Koopman-type operator are calculated by (25).
For a given input function , we calculate the value at y(t) by
| (34) |
For the calculation of the integral we use partition method, in order to ensure the accuracy and do not occupy too much memory, the length of partition length is 0.01, which is accurate compare to .
B. Performance of Koopman-type operator in
disturbanced system under data-driven pseudoinverse
approach
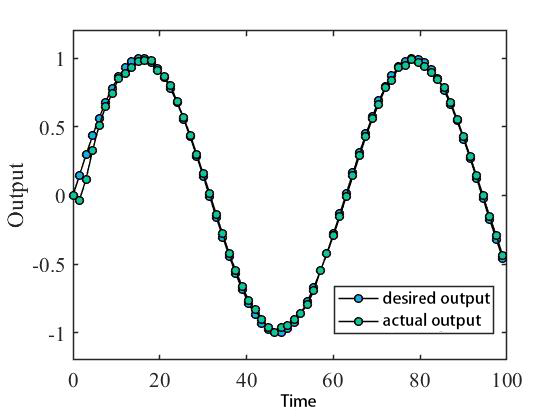
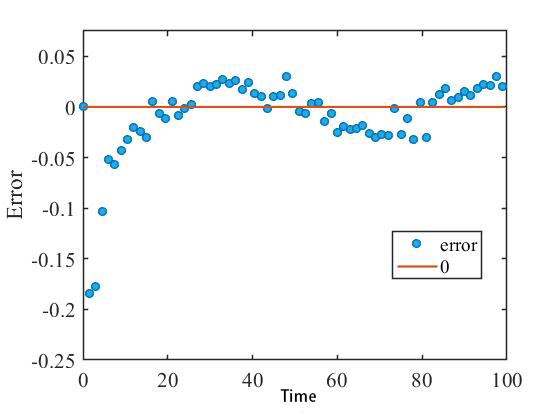
In this part, random disturbances are added to both the input and output. We take =(0 0 0 1)T, . Solving the Koopman operator parameters by Data-driven method and data simulation are performed in the perturbed system. Figures 1 and 2 show the simulation results and errors for this disturbed system, and the images vary slightly from simulation to simulation due to the presence of random functions in the system. From Figure 2, the tracking error is less than .
C. Performance of improved Koopman-type operator
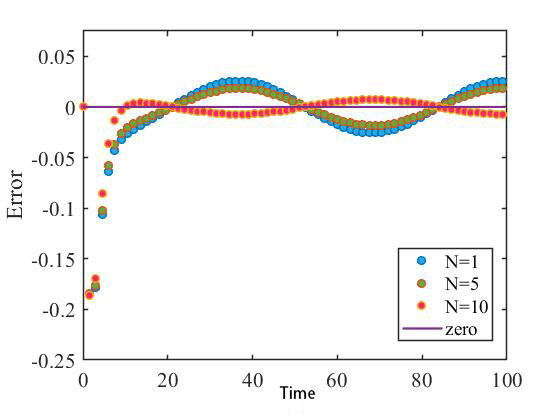
In this part, we introduce a simulated scenario in which large disturbances are added to both the input and output of the system during the data-driven approach for solving the Koopman-type operator coefficients. Specifically, we set to be (0 0 0 1)T, and adopt and to model the larger errors in measurement that are often encountered in practical applications. To obtain different values of , we select values of from 1, 5, and 10 in Theorem 2. After data-driven process, we get a parameter vector , then we input this K into the Koopman-type operator, and the resulting input function is used as the input to the unperturbed system, the error with the tracked function is obtained. Figure 3 illustrates the impact of varying Monte Carlo sampling times on the resulting tracking performance.
VI CONCLUSIONS
In this paper, we design a data-driven Koopman-type operator for linear non-minimum phase (NMP) systems, and give theoretical proof of the control accuracy of NMP systems using the Koopman-type method, this is the first proof for Koopman-type method in NMP systems. We demonstrate that the tracking accuracy of our Koopman-type operator is directly proportional to the ground-bound of the NMP system perturbation, given sufficiently long causal and non-causal desired outputs and appropriately small sampling intervals. Additionally, applying the Monte Carlo method helps mitigate the impact of perturbations on measurement results during the data-driven process. Our ongoing research efforts focus on extending this approach to address linear time-varying non-minimum phase systems.
References
- [1] Thomas Berger. Tracking with prescribed performance for linear non-minimum phase systems. Automatica, 115:108909, 2020.
- [2] Jeffrey A Butterworth, Lucy Y Pao, and Daniel Y Abramovitch. The effect of nonminimum-phase zero locations on the performance of feedforward model-inverse control techniques in discrete-time systems. In 2008 American control conference, pages 2696–2702. IEEE, 2008.
- [3] Charles A Desoer and Mathukumalli Vidyasagar. Feedback systems: input-output properties. SIAM, 2009.
- [4] Santosh Devasia, Degang Chen, and Brad Paden. Nonlinear inversion-based output tracking. IEEE Transactions on Automatic Control, 41(7):930–942, 1996.
- [5] Santosh Devasia and B Paden. Stable inversion for nonlinear nonminimum-phase time-varying systems. IEEE Transactions on Automatic Control, 43(2):283–288, 1998.
- [6] Michael Estrada. Toward the Control of Non-Linear, Non-Minimum Phase Systems via Feedback Linearization and Reinforcement Learning. PhD thesis, University of California Berkeley, CA, USA, 2021.
- [7] Elbert Hendricks, Ole Jannerup, and Paul Haase Sørensen. Linear systems control: deterministic and stochastic methods. Springer, 2008.
- [8] Alberto Isidori. Nonlinear control systems: an introduction. Springer, 1985.
- [9] Stefan Klus, Feliks Nüske, Sebastian Peitz, Jan-Hendrik Niemann, Cecilia Clementi, and Christof Schütte. Data-driven approximation of the koopman generator: Model reduction, system identification, and control. Physica D: Nonlinear Phenomena, 406:132416, 2020.
- [10] Bernard O Koopman. Hamiltonian systems and transformation in hilbert space. Proceedings of the National Academy of Sciences, 17(5):315–318, 1931.
- [11] Xuehui Ma, Fucai Qian, and Shiliang Zhang. Dual control for stochastic systems with multiple uncertainties. In 2020 39th Chinese Control Conference (CCC), pages 1001–1006. IEEE, 2020.
- [12] Giorgos Mamakoukas, Maria L Castano, Xiaobo Tan, and Todd D Murphey. Derivative-based koopman operators for real-time control of robotic systems. IEEE Transactions on Robotics, 37(6):2173–2192, 2021.
- [13] Ivan Markovsky and Florian Dörfler. Data-driven dynamic interpolation and approximation. Automatica, 135:110008, 2022.
- [14] Alexandre Mauroy, Yoshihiko Susuki, and Igor Mezić. Introduction to the koopman operator in dynamical systems and control theory. The koopman operator in systems and control: concepts, methodologies, and applications, pages 3–33, 2020.
- [15] Chanin Panjapornpon, Masoud Soroush, and Warren D Seider. A model-based control method applicable to unstable, non-minimum-phase, nonlinear processes. In Proceedings of the 2004 American Control Conference, volume 4, pages 2921–2924. IEEE, 2004.
- [16] Gianmarco Rallo, Simone Formentin, and Sergio M Savaresi. On data-driven control design for non-minimum-phase plants: A comparative view. In 2016 IEEE 55th Conference on Decision and Control (CDC), pages 7159–7164. IEEE, 2016.
- [17] Chiluka Suresh Kumar, Seshagiri Rao Ambati, Shirish H Sonawane, and Gara Uday Bhaskar Babu. Robust control of discrete minimum and non-minimum phase systems via data-driven virtual reference feedback tuning and imc. The Canadian Journal of Chemical Engineering.
- [18] Klaske Van Heusden, Alireza Karimi, and Dominique Bonvin. Data-driven model reference control with asymptotically guaranteed stability. International Journal of Adaptive Control and Signal Processing, 25(4):331–351, 2011.
- [19] Jurgen van Zundert and Tom Oomen. Stable inversion of lptv systems with application in position-dependent and non-equidistantly sampled systems. International Journal of Control, 92(5):1022–1032, 2019.
- [20] Leon Liangwu Yan and Santosh Devasia. Precision data-enabled koopman-type inverse operators for linear systems. IFAC-PapersOnLine, 55(37):181–186, 2022.
- [21] Chengpu Yu and Michel Verhaegen. Data-driven fault estimation of non-minimum phase lti systems. Automatica, 92:181–187, 2018.
- [22] Qingze Zou and Santosh Devasia. Preview-based stable-inversion for output tracking of linear systems. 1999.