Half-space solutions with 7/2 frequency in the thin obstacle problem
Abstract.
For the thin obstacle problem in , we show that half-space solutions form an isolated family in the space of -homogeneous solutions. For a general solution with one blow-up profile in this family, we establish the rate of convergence to this profile. As a consequence, we obtain regularity of the free boundary near such contact points.
1. Introduction
Motivated by applications in linear elasticity [Sig] and reverse osmosis [DL], the thin obstacle problem studies minimizers of the Dirichlet energy over functions that lie above a lower-dimensional obstacle. In the most basic formulation, a minimizer satisfies the following system
| (1.1) |
Here is the unit ball in the Euclidean space . The coordinate of this space is decomposed as with and Note that the odd part of the solution, , is harmonic and vanishes along the hyperplane . By removing it, we assume that the solution is even with respect to .
Remark 1.1.
The thin obstacle problem enjoys several invariances. For instance, if is a solution, then rotations of around the -axis also solve the problem. The same happens for positive multiples of . For simplicity, we identify two solutions and up to a normalization if a rotation of around the -axis equals a positive multiple of .
After works by Richardson [R] and Uraltseva [U], Athanasopoulos and Caffarelli obtained the optimal regularity of the solution [AC], namely,
The next step is to address the regularity of the contact set and the free boundary To this end, we need precise information about the solution near a contact point.
Applying Almgren’s monotonicity formula [Alm], Athanasopoulos-Caffarelli-Salsa [ACS] showed that for each , there is a constant , called the frequency of the solution at , such that
as Moreover, along a subsequence of , the normalized solution converges to a blow-up profile at , that is,
| (1.2) |
The limit is a -homogeneous solution to (1.1), also known as a -cone.
This opened up two interesting directions of research. The first concerns the space of homogeneous solutions, and the goal is to classify admissible frequencies and cones, namely, to classify
and
for each . The second direction concerns the regularity of the contact set for a general solution. Here the central issue is to quantify the rate of convergence in (1.2), as this leads to uniqueness of the blow-up profile as well as regularity of the contact set. This often requires sorting contact points into
| (1.3) |
1.1. Admissible frequencies and homogeneous solutions
The program along the first direction is complete when . See, for instance, Petrosyan-Shahgholian-Uraltseva [PSU]. In this case, it is known that
Corresponding to integer frequencies, the homogeneous solutions are (even reflections of) polynomials. To be precise, we have
| (1.4) |
and
| (1.5) |
where denotes the real part of a complex number. In particular, all -cones vanish along the line , and -cones are harmonic in the entire space.
On the other hand, homogeneous solutions with frequencies vanish along half-lines. Up to a normalization, they satisfy
where we denote by the support of a measure. Up to a normalization, the -cone is given by
| (1.6) |
where and are the polar coordinates of the plane.
In general dimensions, the classification of admissible frequencies and cones remains incomplete. By extending the solutions from , we see that
Thanks to Focardi-Spadaro [FoS1, FoS2], we know that makes up most of the contact points, in the sense that its complement in has dimension at most .
Athanasopoulos-Caffarelli-Salsa classified the lowest three frequencies [ACS], namely,
Colombo-Spolaor-Velichkov [CSV] and Savin-Yu [SY1] showed the existence of a frequency gap around each integer, that is, for each , there is , depending only on and , such that
For the classification of cones, most results center around frequencies in . By Athanasopoulos-Caffarelli-Salsa [ACS], it is known that
Note that is monotone along any direction in , a fact used extensively for the classification of -cones as well as free boundary regularity near points with frequency.
Extensions of (1.4) and (1.5) to general dimensions were obtained by Figalli-Ros-Oton-Serra [FRS] and Garofalo-Petrosyan [GP], respectively. Similar to their counterparts in , all -cones vanish in the hyperplane , and -cones are harmonic in the entire space. Consequently, if we let denote a solution to the linearized equation around an integer-frequency cone, then either or has a sign. The vanishing property of -cones implies that . The harmonicity of -cones implies that . These are the key observations behind the regularity of contact points with integer frequencies [SY2].
1.2. Regularity of the contact set
By the classification of -cones, if , then after a normalization, we have along a subsequence of . Here we are using the notations from (1.2) and (1.6). With the monotone property of , Athanasopoulos-Caffarelli-Salsa proved that the blow-up profile is independent of the subsequence of , and that is locally a -dimensional -manifold in [ACS]. Recently, this manifold has been shown to be smooth in [DS1] and analytic in [KPS].
For points in , uniqueness of the blow-up profile was established by Garofalo-Petrosyan [GP], who also showed that is contained in countably many -manifolds. Regularity of the covering manifolds was improved to by Colombo-Spolaor-Velichkov [CSV]. For points in , uniqueness of the blow-up profile was obtained by Figalli, Ros-Oton and Serra [FRS]. Recently, a unified approach was developed to quantify the rate of convergence in (1.2) at points in and [SY2]. In particular, we proved that is locally covered by -manifolds.
1.3. Main results
In this paper, we study contact points with frequency in . The example from (1.6) illustrates that these points can make up the entire free boundary as well as the entire line . Unfortunately, not much is known about them in terms of the classification of -cones and the regularity of .
Unlike -cones, homogeneous solutions with frequency are not monotone along directions in . On top of that, for a solution, , to the linearized equation around , neither nor is necessarily true. Thus the observation behind the study of integer-frequency points is no longer applicable. As a result, it requires new ideas to study contact points with frequency.
With the full classification of -cones seemingly out of reach, we focus on the family of half-space cones. Up to a rotation in , these are homogeneous solutions satisfying
With notations from (1.6) and footnote 1, half-space -cones in belong to, up to a normalization, the following family
| (1.7) |
where
| (1.8) |
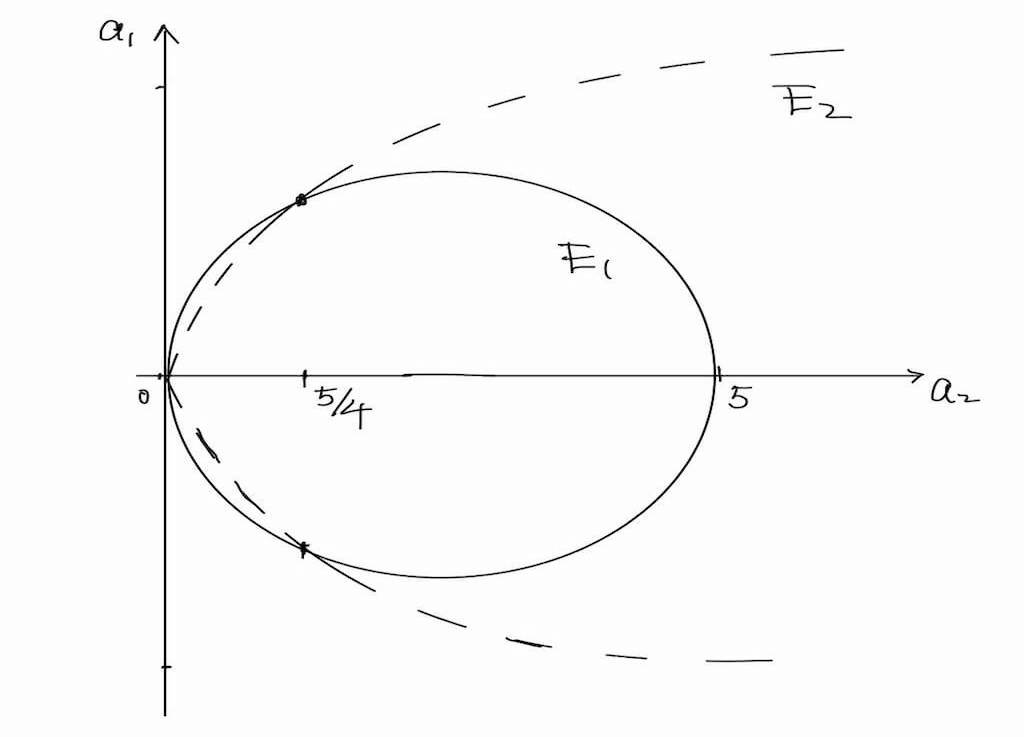
The subscript in is to indicate that the coefficient of is . The parameters lie in the region
where and are two ellipses
| (1.9) |
Their boundaries intersect at and . See Figure 1.
Remark 1.2.
Up to a normalization, this family contains all examples of -cones currently known.
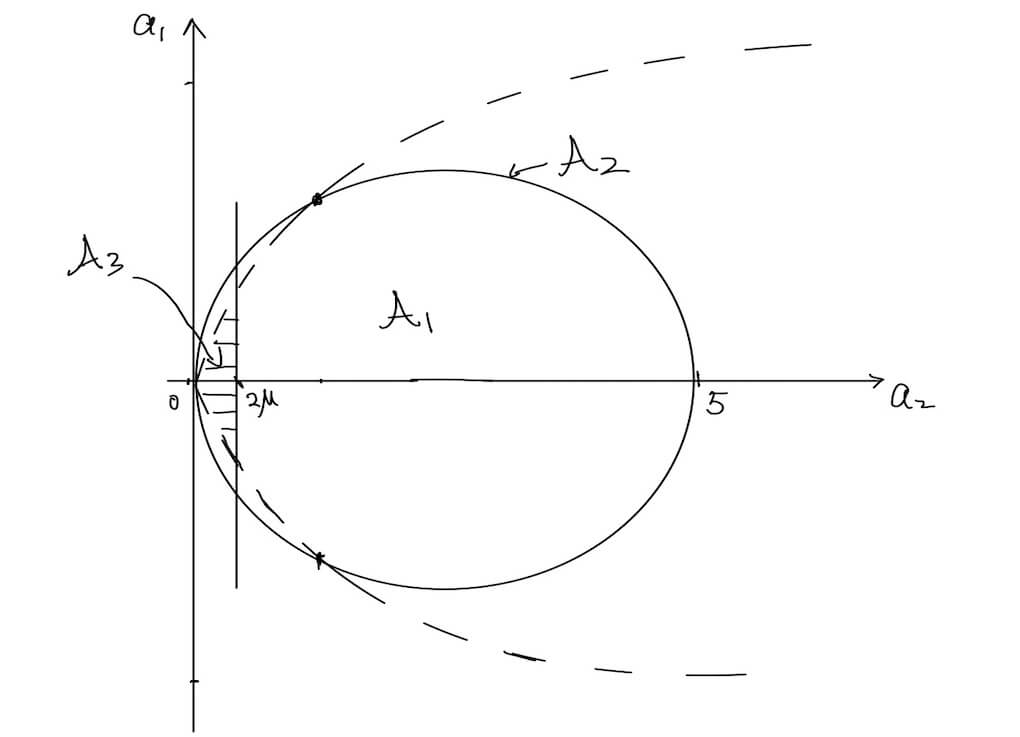
For future reference, we divide further into three subregions
according to the location of relative to . See Figure 2.
Let be a small parameter222The parameter is chosen in Sections 5. See Remark 5.1.. These subregions are defined as:
| (1.10) | ||||
With an abuse of notation, we also write
| (1.11) |
when the coefficients of belong to the corresponding region.
We now describe the main results of this work.
Although there could be other -cones, they cannot be connected to the half-space cones. This is the content of our first result.
Theorem 1.1.
There is a universal constant such that if , then up to a normalization, we have
A universal constant is a constant whose value is independent of the particular solution under consideration.
The following two results address the behavior of the solution near a contact point where at least one blow-up belongs to . For brevity, let us denote these points by , that is,
The next result quantifies the rate of convergence in (1.2) at a point in :
Theorem 1.2.
Let be a solution to (1.1) in with Then up to a normalization, we have the following two possibilities:
-
(1)
either
-
(2)
or
for some .
The parameter is universal.
In particular, blow-up profiles at points in are independent of the subsequence .
Theorem 1.2 also leads to a stratification result concerning , we have
Theorem 1.3.
Let be a solution to (1.1) in . Then we have the decomposition
where is locally discrete, and is locally covered by a -curve.
Remark 1.3.
Suppose , we actually have regularity of the entire near (instead of just ). If is a blow-up profile at , then the free boundary is at . If blows up to some , then for some small
These results are proven through an improvement-of-flatness argument. Roughly, if the solution is approximated in by a profile with error , then we need to reduce the error at a smaller scale, say in by picking another profile . The natural candidate is
| (1.12) |
where is the solution to the linearized problem around .
This strategy has been successful in many free boundary problems, for instance, the Bernoulli problem [D], the obstacle problem [SY3] and the triple membrane problem [SY4]. In these problems, the solutions have a fixed homogeneity at free boundary points. This is not the case for the thin obstacle problem. Consequently, we cannot always reduce the error in our problem. When this happens, however, we can ‘improve the homogeneity’ in terms of the Weiss energy functional [W].
This is the content of the main lemma of this work:
Lemma 1.1.
There are constants, , , small, and big, such that
If with and , then we have the following dichotomy:
a) either
and
b) or
where up to a normalization, and
The space consists of -approximated solutions at scale , and is the Weiss energy functional, defined in (2.6). A similar lemma was established for integer-frequency points in [SY2].
The proof of Lemma 1.1 is divided into three cases, corresponding to the three subregions of as in Figure 2.
When , the modification from (1.12) solves the thin obstacle problem for small . In this case, Lemma 1.1 follows from a standard compactness argument.
Extra care is needed when . Here the profile could become degenerate at certain points. The same might violate the constraints and .
For , there are two possibilities. If the coefficients are bounded away from , the intersection of and , then only one of the two constraints might fail. If they are very close to , both constraints can fail, but the locations of failure are well-separated from . In both cases, we replace by solving a boundary-layer problem around the place where the constraints fail. This is the same strategy adapted to study integer-frequency points [SY2].
New challenges arise when . When is very close to , both constraints might fail along . Indeed Lemma 1.1 needs to be modified to be a trichotomy. See Lemma 5.1. For this, we need to study an ‘inner problem’ in small spherical caps near , which reduces to the thin obstacle problem in with data at infinity. This is the main reason why we restrict to three dimension in this work.
Although this restriction to three dimension seems crucial, we hope similar ideas would work for half-space solutions with higher frequencies.
This paper is organized as follows: In Section 2, we collect some preliminary results. In Sections 3, we establish Lemma 1.1 when . The same lemma is proved in Section 4 for near . In Section 5, a modified lemma is proved for profiles in . This is the most involved part of this paper, and requires several technical preparations that are left to the Appendices. Finally in Section 6, all these are combined to show the main results Theorem 1.1, Theorem 1.2 and Theorem 1.3.
2. Preliminaries
In this section, we gather some useful notations and results.
Unless otherwise specified, in this paper we denote by a solution to the thin obstacle problem (1.1) in some domain in . For this space, we have the standard coordinate system decomposed as
A subset of is decomposed as , where
| (2.1) |
With this notation, the contact set is
Recall that the solution is assumed to be even with respect to As such it may fail to be differentiable in the -direction at points in . Nevertheless, it is still differentiable from either side of the domain. In this paper, for a function , we use to denote its one-sided derivative at , namely,
| (2.2) |
In general, if is a domain in , we denote by the inner unit normal along . For and , we denote by the one-sided normal derivative at with respect to , that is,
| (2.3) |
To utilize the rotational symmetry of the problem, we introduce the rotation operator with respect to the -axis . For , this operator acts on points, sets, and functions in the following manner:
| (2.4) | ||||
The problem is also scaling invariant. For and , defined as in (1.3), the the rescaled function
| (2.5) |
solves the problem in a rescaled domain with When , we simplify the notation by
2.1. Weiss monotonicity formula and consequences
The Weiss monotonicity formula was used by Weiss to treat the obstacle problem [W], and was adapted to the thin obstacle problem by Garofalo-Petrosyan [GP]. Its decay is used in this paper to quantify an ‘improvement of homogeneity’ between scales.
Since we are concerned with contact points with frequency in , we include here only the -Weiss energy functional in
| (2.6) |
We collect some of its properties in the following lemma. For its proof, see Theorem 1.4.1 and Theorem 1.5.4 in [GP].
Lemma 2.1.
Suppose that solves the thin obstacle problem in . Then for , we have
| (2.7) |
In particular, is non-decreasing.
If , then
The rescaling is defined as in (2.5).
2.2. Harmonic functions in slit domains and half-space cones
Motivated by thin free boundary problems, harmonic functions in slit domains were studied in great detail by De Silva-Savin [DS1, DS2]. In this work, we only need certain basic elements when the slit is flat.
Let denote the polar coordinate for the -domain with and . The slit is defined as
| (2.9) |
For a subset of , we decompose it relative to the slit as where
| (2.10) |
Given a domain , a harmonic function in the slit domain is a continuous function that is even with respect to and satisfies
| (2.11) |
As is the case for regular domains, homogeneous solutions play an important role. Given a non-negative integer , let’s define the following space
| (2.12) |
Functions in satisfy
| (2.13) |
where
| (2.14) |
These functions are the basic building blocks for general solutions to (2.11). For instance, we have the following theorem from [DS1]:
The functions from (1.6) are homogeneous harmonic functions in The following proposition states that, in some sense, these functions generate all homogeneous harmonic functions. Its elementary proof is left to the reader.
Proposition 2.1.
If , then we have the following expansion
where , and is a -homogeneous polynomial in .
The following orthogonality follows from standard argument:
Proposition 2.2.
Suppose are two non-negative integers, then we have the following:
a) If and are polynomials of then
2) If and , then
In this work, we are most interested in the space of harmonic functions with homogeneity, namely, . Following Proposition 2.1, we see that this space is spanned by the following four functions:
| (2.15) |
The same space is also spanned by and its first three rotational derivatives. Using the notation from (2), they are
| (2.16) |
Remark 2.1.
These two bases are related by
With these preparations, we classify half-space solutions to the thin obstacle problem in that are -homogeneous:
Proposition 2.3.
Suppose that is a nontrivial -homogeneous solution to (1.1) in . The followings are equivalent:
-
(1)
;
-
(2)
;
-
(3)
up to a normalization.
Proof.
By definition of , statement (3) implies the other two. Here we show that statement (1) implies statement (3). A similar argument gives the implication (2)(3).
By Green’s formula and homogeneity of the functions involved, we have
By statement (1), on , thus
Since on , this implies With statement (1), we see that is a -homogeneous harmonic function in . Consequently, it is a linear combination of functions from (2.15), that is,
for Such a function satisfies the constraints and if and only if and ∎
For our purpose, we also need homogeneous harmonic functions in slit domains with singularities. In , typical examples are given by
| (2.17) |
Each is -homogeneous and harmonic in
In , we will need the following two functions
| (2.18) |
Both are -homogeneous functions in and harmonic in . Near the poles , they have a singularity of order and respectively.
Correspondingly, we have
| (2.19) |
which are also -homogeneous and harmonic in .
2.3. A double-sequence lemma
We conclude this section with a lemma dealing with two numerical sequences. It is a slight modification of Lemma 5.1 from [SY2].
Lemma 2.2.
Let and be two sequences of real numbers between and . Suppose that for some constants, big, small and , we have
and the following dichotomy:
-
•
either and ;
-
•
or and .
Then we have
| (2.20) |
for all and
Moreover, we have
| (2.21) |
and
| (2.22) |
Here and are constants depending only on , and
3. Dichotomy for
Starting with such a profile , the natural modification from (1.12) solves the thin obstacle problem if is small. Consequently, the improvement-of-flatness result follows by a classical argument.
Nevertheless, we include the argument here. Readers less familiar with the subject might take this section as a roadmap for the strategy. Contrasting this section with the next two, we hope to illustrate the challenges that arise in each different case.
3.1. Well-approximated solutions
Throughout this section, we consider profiles with
that is, for a small parameter
| (3.1) |
To simplify our discussions, let us denote
| (3.2) |
The space of well-approximated solutions is defined as
Definition 3.1.
Suppose that the coefficients of satisfy (3.1).
For , we say that is a solution -approximated by at scale if solves the thin obstacle problem (1.1) in , and
In this case, we write
Being well-approximated implies the localization of the contact set:
Recall the notations for slit domains from (2.10), and that denotes the polar coordinate of the -plane.
Proof.
Using (3.1) and direct computations, we have
With in , it follows in This gives the first conclusion.
Now for some large to be chosen, let , and
Define the barrier then is a solution to the thin obstacle problem. Inside , we have
for large. It follows from even symmetry that
for large.
Together with in , this implies in . The second conclusion follows. ∎
Since the profile solves the thin obstacle problem, by the maximum principle and Cacciopolli’s estimate, we have the following:
Lemma 3.2.
Recall the Weiss energy functional from (2.6). This energy is controlled for well-approximated solutions:
Lemma 3.3.
Suppose that then
for a universal constant .
3.2. The dichotomy
With these preparations, we state the main lemma of this section:
Lemma 3.4.
Suppose that with satisfying (3.1).
There is small , depending only on and , such that if , then we have the following dichotomy:
-
(1)
either
and
-
(2)
or
for some
with .
The constants , and depend only on .
Proof.
Let and be small constants to be chosen.
Note that for any , we always have .
Suppose, on the contrary, that the conclusion is false. Then we find a sequence satisfying
and
but
| (3.5) |
and
| (3.6) |
for any satisfying the properties as in alternative (2) from the lemma.
Step 1: Compactness.
Define . Then in .
With Lemma 3.1, we have
As a result, up to a subsequence, the functions converge locally uniformly in to some . The limit is a harmonic function in the slit domain , defined as in (2.11). Since the set has zero capacity, we have
| (3.7) |
With Theorem 2.1, for , we find , a -homogeneous harmonic function in , such that
| (3.8) |
Moreover, each is universally bounded.
In the remaining of this proof, we omit the subscripts in , and .
Step 2: Almost homogeneity.
With (3.7), we find such that
Combined with (3.8), this implies
As a result, we have
where denotes the rescaling of the function as in (2.5). With the homogeneity of and , this gives
| (3.9) |
Meanwhile, applying (2.8) together with (3.5), we have
for a universal constant . Note that we used our choice of .
This implies, by the maximum principle, that in . As a result,
Together with (3.9), this gives
Using Proposition 2.2 and homogeneity of the functions involved, we have
since
Step 3: Improvement of flatness.
The last estimate from the previous step gives
We temporarily switch to the basis from (2.16). Suppose, in this basis, we have
Thus
Using Remark 2.1 and (3.1), we have lower bounds:
| (3.10) |
Now we let be the solution to the following system
Using (3.10), it is elementary that this system has a solution when is small. Moreover, we have
| (3.11) |
Using Taylor’s Theorem and the integrability of , we have
for depending on . Switching back to the basis , we have
with by (3.11). By homogeneity, we have
Combining this with the first estimate in this step, we have
Since lies in the interior of and , we see that solves the thin obstacle problem when is small, depending on from (3.2). As a result, we can apply Lemma 3.2 to get
Consequently, if we choose and small, depending only on , such that , then
eventually. This contradicts (3.6). ∎
4. Dichotomy for near
In this section, we focus on profiles near from (1.3).
To illustrate the ideas, let’s take with
for a small parameter , to be chosen in Section 5. See Remark 5.1. The function was defined in (1.8). Recall also the basis from (2.15) for the space from (2.12).
We further assume
The other case is symmetric.
Although solves the thin obstacle problem, the two constraints and become degenerate as
-
(1)
When ,
-
(2)
When ,
where
| (4.1) |
Let’s denote by the intersections of these two rays with the sphere
| (4.2) |
It is crucial that both points are bounded away from with
| (4.3) |
where depends only on
Due to the degeneracy of , the modified as in (1.12) may fail to solve the thin obstacle problem, and is no longer a suitable profile to approximate our solution (for instance, a result similar to Lemma 3.2 is not necessarily true).
We tackle this issue by solving the thin obstacle problem in small spherical caps around , and replace with this solution. Along the boundary of the caps, this procedure creates an error. With (4.3), we show that this error has a significant projection into from (2.12). This allows us to control the error in terms of the decay of the Weiss energy.
In most part of this section, we deal with profiles near the ‘doubly critical’ profile
| (4.4) |
This is the only profile in for which both and vanish. As a result, for profiles nearby, we need to find replacements in spherical caps near both
For other profiles , only one of the two constraints is degenerate. The treatment is more straightforward, and is only sketched near the end of this section.
4.1. The boundary layer problem around
We study homogeneous harmonic functions near . For a small universal constant , suppose
satisfy
| (4.5) |
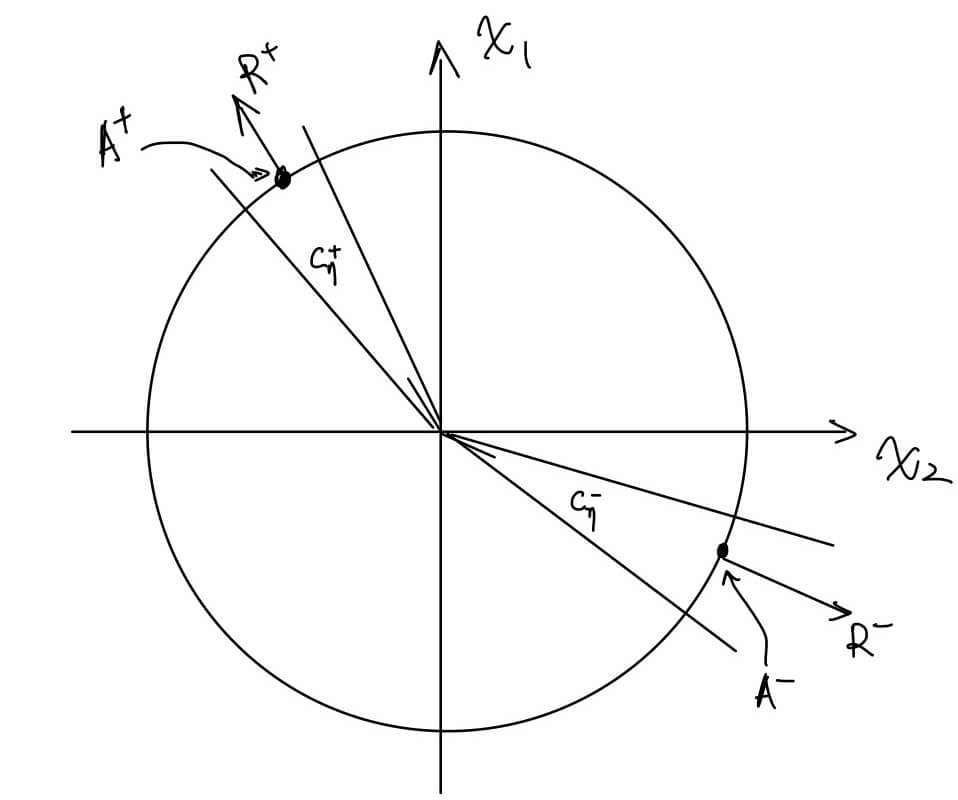
Recall from (4.2) that and are the points of degeneracy for For a universal small , define two spherical caps
Thanks to (4.3), both are bounded away from for small . The same notations are used to denote the cones generated by the two caps. See Figure 3.
In general, for we define
| (4.6) |
Inside the caps , we solve the thin obstacle problem for the operator from (2.14) with as boundary data:
| (4.7) |
Note that when is universally small, the maximum principle holds for in , and problem (4.7) is well-posed.
The maximum principle also implies
| (4.8) |
With the symmetry of , the solutions are even with respect to
Definition 4.1.
Given satisfying (4.5), our replacement for , to be denoted by , is the following function
Equivalently, the replacement is the unique minimizer of
over
Here denotes the tangential gradient on .
We also denote the -homogeneous extension of by the same notation.
Recall the notations for slit domains from (2.10). We have, by definition,
| (4.9) |
Here arise from the gluing of and along , and are a consequence of the thin obstacle problem (4.7). In particular, following our convention for one-sided derivatives (2.3), we have
| (4.10) |
and
Remark 4.1.
The replacement does not necessarily satisfy the two constraints and outside This is due to the possible presence of in , which becomes dominant near .
On the other hand, suppose that satisfies (4.5) with , then satisfies and outside and the same holds for
One essential ingredient of this section is that have significant projections into from (2.12). To measure this, we introduce some auxiliary functions.
Let denote the projection of into from (2.12), namely,
| (4.11) |
where
and
for It follows that
By Fredholm alternative, there is a unique function satisfying
The natural extensions of , , and into are denoted by the same symbols.
With this convention, we define
| (4.12) |
which satisfies
| (4.13) |
where we have used the notations for slit domains from (2.10).
Finally, let’s denote
| (4.14) |
which measures the size of the error coming from the gluing procedure along
For all the functions and constants defined so far, the subscript is often omitted when there is no ambiguity.
We collect some properties of the replacement from Definition 4.1.
We have the following localization of the contact set of :
Lemma 4.1.
Proof.
With (4.8), we have in . The first statement follows from direct computation.
The next lemma controls the change in when is modified:
Lemma 4.2.
Suppose that satisfies (4.5), and take with for .
Then we can find a universal modulus of continuity, , such that
and
Proof.
The distinction between the estimates in and is due to the fact that in , while in
Step 1: The estimate in .
Let . We build a barrier by solving the following system
where is the universal constant from Lemma 4.1. We extend to by evenly reflecting it with respect to
It follows from the maximum principle and the second statement in Lemma 4.1 that
For to be chosen, it follows
where we used the Lipschitz regularity of and along From here the maximum principle implies and consequently,
Using Lemma 4.1, for small , it follows from the maximum principle in that
A symmetric argument gives
By choosing small, and noting that for a modulus of continuity depending only on , we get the desired estimate in .
Step 2: The estimate in .
The main difference with the previous case is that no longer vanishes along in the cap .
We build a barrier by solving
With the first statement in Lemma 4.1, it follows from the maximum principle that
In particular, we have
A symmetric argument gives
Note that as , the previous two estimates gives the desired results in .
Step 3: The estimate.
For , with the same barrier from Step 2, we have for small
Thus
By choosing small, and noting as , we have
A similar estimate in follows directly from the conclusion in Step 1. Since outside , the estimate follows. ∎
As a consequence, we can control the change of , defined in (4.14), when is modified:
Corollary 4.1.
Under the same assumption as in Lemma 4.2, we have
Proof.
Define and , then vanishes along , and satisfies in .
Boundary regularity estimate gives
Similarly, with vanishing along , and in we have
The following lemma is the key estimate of this section:
Lemma 4.3.
Proof.
Define , and let denote the solution to
For small, Lemma 4.1 implies that solves the same equation as in , and both vanish long .
With (4.8), we can apply boundary Harnack principle to get
for any Here we denoted by the point on we get by moving from along the -direction by distance .
With (4.10), this implies
With a similar argument, we have
where denotes the solution to
Now for a constant to be chosen, let’s define
| (4.15) |
A direct computation gives
where and are positive constants. With , we find such that
| (4.16) |
for a universal if is small.
Consequently,
Similarly,
| (4.17) |
Note that , we have , which gives the desired estimate. ∎
We also have
Lemma 4.4.
Proof.
In this proof, define . By (4.8), it suffices to get an upper bound for in
Suppose , and that is a point where this maximum is achieved, then . As a result, This implies that , and . Thus and we have
We also have the following control on the Weiss energy of the replacement :
Lemma 4.5.
Recall the definition of the Weiss energy from (2.6).
Proof.
We first control the total mass of from (4.9).
Take the auxiliary function from (4.15), we have
For the last equality, we used that along , which contains
Now we note that is supported in . On this set, is supported in . Recall from (4.16), we have in . Thus and we conclude
With in and , we conclude
| (4.18) |
4.2. Well-approximated solutions near
For satisfying (4.5), we define the space of well-approximated solutions in a similar manner as in Subsection 3.1. The main difference is that now the solutions are approximated by the replacement as in Definition 4.1.
Definition 4.2.
Suppose that the coefficients of satisfy (4.5).
For , we say that is a solution -approximated by at scale if solves the thin obstacle problem (1.1) in , and
In this case, we write
Similar to Lemma 3.1, we can localize the contact set of a well-approximated solution if we assume in the expansion of . See Remark 4.1.
Recall that is the small parameter from (4.5), and that and are the two rays of degeneracy from (4.1) for .
Proof.
Under our assumptions, we have, inside ,
The conclusion follows from the same argument as in the proof for Lemma 3.1. ∎
The following is similar to Lemma 3.2 and Lemma 3.3. It is the main reason why it is preferable to work with instead of directly with .
4.3. The dichotomy near
With these preparations, we state the dichotomy for profiles near from (4.4).
Lemma 4.8.
Suppose that
for some satisfying
There is a universal small constant , such that if and , then we have the following dichotomy:
-
(1)
either
and
-
(2)
or
for some
with
The constants , and are universal.
Remark 4.2.
For , all the constructions in Subsection 4.1, leading to , are performed with respect to the rotated coordinate system.
Proof.
We apply a similar strategy as in the proof for Lemma 4.8.
For and to be chosen, suppose that the lemma is false, then we find a sequence satisfying the assumptions as in the lemma with , but both alternatives fail, namely,
| (4.19) |
and
| (4.20) |
for any satisfying the properties as in alternative (2) from the lemma.
Step 1: Compactness.
With Lemma 4.1, Lemma 4.6, (4.9) and (4.13), we have, up to a subsequence,
The limit is a harmonic function in the slit domain according to (2.11).
For Theorem 2.1 allows us to find , an -homogeneous harmonic function that is universally bounded in and satisfies
for some
Recall that denotes the rescaling of as in (2.5).
We omit the subscripts in , , , and in the remaining of the proof.
Step 2: Almost homogeneity.
Using the homogeneity of the functions as well as the definition of from (4.12), the last estimate from the previous step gives
| (4.21) |
For this, we used (4.19) in the same way as in Step 2 from the proof of Lemma 3.4 to control
By definition, we have from (2.12). With (4.21), we apply Proposition 2.2 to get
and
| (4.22) |
These imply
| (4.23) |
Moreover, with Lemma 4.3, we use (4.22) to conclude
| (4.24) |
for small and large . Consequently,
Combining this with the definition of and (4.23), we have
With Lemma 4.2, we get
where
Step 3: Improvement of flatness.
With the same technique in Step 3 from the proof of Lemma 4.8, we find
such that
| (4.25) |
where In this step, it is crucial that is bounded away from .
If and are small, then contains and By definition of replacements and (4.25), we have
Combining this with the last estimate from the previous step, we have
| (4.26) |
With Lemma 4.7 and (4.26), this implies
which implies
if , are chosen small universally and is large. The bound on follows from (4.27).
This contradicts (4.20). ∎
4.4. Dichotomy near general
In this subsection, we sketch the ideas for dealing with other profiles in . Let’s take , namely,
with
for a small parameter to be fixed in the next section (see Remark 5.1), and the function defined in (1.8). Let’s further assume as the other case is symmetric.
Thanks to results from Subsection 4.3, it suffices to consider the case when
| (4.28) |
For such , we define
with the notation from (4.2). With (4.3), these caps are bounded away from if is small, depending on .
For small and a profile
with
we define its replacement by solving (4.7) in , as in Definition 4.1. With (4.28), we see that when is small, the replacement in one of the caps is identical to . The auxiliary functions in Subsection 4.1 can be defined in a similar fashion.
With this construction, results from Subsection 4.1 follow from the same argument, with the constants possibly depending on The class of well-approximated solutions can be defined similarly to Definition 4.2 with similar properties. The same argument in the previous section leads to a similar dichotomy for profiles near .
Combining these with Lemma 4.8, we have the following
Lemma 4.9.
Suppose that
for some satisfying
with
There is a small constant , depending only on , such that if and , then we have the following dichotomy:
-
(1)
either
and
-
(2)
or
for some
with
The constants , and depend only on .
5. Trichotomy for
In this section, we study profiles near from (1.3), that is, profiles near . To some extend, this section contains the main contribution of the work.
Similar to the case studied in Section 4, the constraints and become degenerate for profiles in . Contrary to the previous case, the points of degeneracy can be arbitrarily close to two poles . As a result, the cornerstone for the previous case, Lemma 4.3, no longer holds.
To tackle this issue, we need to study the the thin obstacle problem on spherical caps near . At the infinitesimal level, this reduces to the problem in studied in Appendix B. This is one of the main reasons why we need to restrict to three dimensions in this work. This infinitesimal information influences the solution at unit scale through two higher Fourier coefficients along small spherical caps near With these two extra Fourier coefficients, we can define two extended profiles, one for each semi-sphere. These extended profiles approximate the solution with finer accuracy.
Arising from this procedure are two errors, say and . The former happens along the big circle , where the extended profiles from the two semi-spheres are glued. The latter happens along the boundary of small spherical caps near the poles We establish that has a projection into with size proportional to . Therefore, if is dominating, a similar strategy as in Section 4 can be carried out.
This leads to the following trichotomy, the main result in this section.
Lemma 5.1.
Suppose that
for some with and
| (5.1) |
small.
Given small , we can find , small, and big, depending only on , such that if and , then we have the following three possibilities:
-
(1)
and
-
(2)
or
for with
-
(3)
or
Recall the basis , the rotation operator , and the Weiss energy from (2.15), (2) and (2.6) respectively. The solution class and the measurement for error , similar to their counterparts from Section 4, will be defined later in this section.
Remark 5.1.
Remark 5.2.
With the definition of , we can write with Such coordinates are more convenient for profiles near .
In this section, we often write
assuming implicitly that
Equivalently, in the basis from (2.16)444The coefficients are related by ,
Remark 5.3.
If we assume only
and further then solves the thin obstacle problem outside a cone with -opening near , where might become positive.
The first half of this section is devoted to the proof of Lemma 5.1.
If the last possibility in Lemma 5.1 happens, then is not necessarily dominating (see the paragraph before the statement of the lemma). In this case, we need finer information of the solution using information from Appendix B. This is carried out in the second half of this section.
5.1. The extended profile
Recall that denotes the polar coordinate of the -plane. For a small universal constant , we define two small spherical caps near
| (5.2) |
In general, for small , let
The cones generated by these caps are denoted by the same notations.
In this subsection, we focus on . The other case is symmetric. As a result, we often omit the superscript in
Given a profile , if we denote by the solution to the thin obstacle problem in with as boundary data, then in general we have . This is not precise enough for later development.
The main task of this subsection is to show that we can find an extended profile, , so that if we solve a similar problem with as boundary data, then the error can be improved to -order. This will be an essential building block for our replacement of .
Throughout this subsection, we assume
| (5.3) |
where is the universal constant from Proposition B.1, and is a small universal constant.
Corresponding to these parameters, let us denote
| (5.4) | ||||
Recall the basis from (2.15) and the functions , from (2.18).
Let denote the solution to
| (5.5) |
The -homogeneous extension of is denoted by the same notation.
We often omit some of the parameters in and when there is no ambiguity.
We begin with localization of the contact set of :
Lemma 5.2.
Here we are using the notations for slit domains from (2.10).
Proof.
The key is to construct a barrier similar to the one in Step 2 from the proof of Proposition B.1. We omit some details.
With the basis from (2.16), rewrite as
By taking large universally and solving
the function satisfies
for small. Recall the rotation operator from (2). By taking larger, if necessary, it can be verified that solves the thin obstacle problem in (See Remark 5.3).
With a similar argument, we can construct a lower barrier of the form , which implies
and
Finally, we apply the maximum principle to in to get the desired bound on . ∎
We now link the behavior of near to the problem studied in Appendix B. Before the precise statement, we introduce some notations.
For a function , let us denote by the following rescaling of its restriction to the plane
| (5.7) |
For the solution from (5.5), it follows that solves the following
| (5.8) |
where , and is the operator defined as
Proposition 5.1.
For and for , let be the solution to (B.3) with data at infinity.
Given , there is a modulus of continuity, , depending only on , such that
where is defined in (5.7).
Proof.
With the compactness of the region for it suffices to find a modulus of continuity for a fixed .
Consequently, for any compact , there is a constant depending only on , such that
If we apply Proposition 5.1 to the special case when , we see that the infinitesimal behavior of near is not affected by the coefficient . This allows the fixed argument in the following lemma:
Lemma 5.3.
Let satisfy and for , and be the universal constant from Proposition B.1.
Moreover, there is a universal modulus of continuity, , such that
for .
Recall the definition of from Remark B.1.
Proof.
With Lemma 5.2, we have
and along . By Lemma A.1 with , to get the bound on , it suffices to choose so that
| (5.11) |
Now let us we define
and
Then we can compute the last term in (5.12) as
With Corollary B.1, the second term vanishes. With Proposition 5.1 and for small, the first term is of order . We can use the definition of and to continue
By adjusting , we can make the right-hand side . Moreover, this choice of satisfies
| (5.13) |
where is the modulus of continuity from Proposition 5.1, and is the constant from Lemma 5.2.
In particular, for small, we can find satisfying as in (5.3) such that
A similar argument gives satisfying such that
| (5.14) |
and
With these, we finally define the extended profile:
Definition 5.1.
Remark 5.4.
Corresponding to , we refer the coefficients from Definition 5.1 by
5.2. Boundary layer near and well-approximated solutions
In this section we construct the replacement of profiles near . It is illustrative to compare this subsection with the construction from Subsection 4.1.
Given , satisfying (5.3), and the corresponding as in Definition 5.1, we define as the solution to (5.5) in .
If in Definition 5.1, the extended profile is discontinuous along . To fix this issue, we make another replacement in the following layer
The cone generated by is denoted by the same notation.
With this, we define the replacement of as:
Definition 5.2.
For satisfying (5.3), its replacement, , is defined as
Equivalently, the replacement is the minimizer of the energy
over
This replacement satisfies
| (5.15) |
Similar to Subsection 4.1, we define some auxiliary functions.
By Fredholm alternative, there is a unique function satisfying
Corresponding to these, we define
| (5.17) |
which satisfies
| (5.18) |
Let’s denote
| (5.19) |
which measures the size of the error coming from the gluing procedure along
Similarly, corresponding to from (5.15), we define
The function is the unique solution to
Finally, we let
| (5.20) |
and
| (5.21) |
The subscript is often omitted when there is no ambiguity.
We estimate the change in when is modified:
Lemma 5.4.
Suppose that satisfies (5.3), and that satisfies
Given small , we have, for big depending on ,
for small .
Remark 5.5.
It suffices to consider the case when . In case , we define , and rewrite . Then . Consequently, conditions from (5.3) are satisfied if is small enough.
Once the case for is established, to deal with the case , we can apply the conclusion to get an upper bound of the form , leading to the desired conclusion if we slightly decrease and choose small enough.
Proof.
We first focus on the estimate in . In this region, suppose
Step 1: Estimate on .
For to be chosen, with the same argument as in Lemma 5.3, we have
| (5.22) |
for a constant depending on .
Since and both solve the thin obstacle problem (5.5) in , the maximum principle implies that the function is increasing for With the previous estimate, this gives
if . The last term is a consequence of the bound in .
With the orthogonality between and , this implies
where is universal. By choosing , universally, we have
Step 2: Estimate in .
With the final estimate from the previous step, we have
With the maximum principle and (5.22), this gives
Meanwhile, and in by definition, we conclude
Step 3: Conclusion.
With a symmetric argument, we have
Using the maximum principle, we have
From here, we choose small, depending on such that . Then we choose , which fixes the constant . ∎
Lemma 5.4 leads to a control over the change in and from (5.19) and (5.20) when is modified. The proof is similar to the proof for Corollary 4.1 and is omitted.
Corollary 5.1.
With the same assumption and the same notation as in Lemma 5.4, we have
Among the terms on the right-hand side of (5.15), the term has a significant projection into . While the similar result is not necessarily true for , we can show that is small. This is the content of the following lemma.
Lemma 5.5.
Proof.
With our convention for one-sided derivatives from (2.3), we have By definition of and the maximum principle, we have in . The upper bound on follows from boundary regularity of harmonic functions.
With Lemma 5.3, the bound on follows from a similar argument.
It remains to prove the lower bound for
For this let’s define
Then for small , we have
With the definition of and orthogonality, we have
| (5.23) |
By direct computation, we have
where is a positive constant. Thus
Now note that is odd with respect to the -variable and is even with respect to the -variable, we have
We now control the Weiss energy from (2.6) for the replacement :
Proof.
Similar to Lemma 4.5, it suffices to prove the upper bound for the following quantity
| (5.24) |
For the second term, we note that is supported in by Lemma 5.2. On this segment, we have , thus
| (5.25) |
since by Lemma 5.2.
For from (5.2), we notice that on the support of , we have and by definition. With from Lemma 5.5, we have
| (5.26) |
Note that along by Lemma 5.5, this implies
| (5.27) |
On the other hand, using orthogonality, we have
| (5.28) |
Similarly,
| (5.29) |
The following lemma explains the main reason why it is preferable to work with instead of or .
Similar to Definition 4.2, we define the class of well-approximated solutions:
5.3. The trichotomy near
With all these preparations, we prove the trichotomy as stated in Lemma 5.1. Steps similar to those in the proofs of Lemma 3.4 and Lemma 4.8 are omitted.
Proof of Lemma 5.1.
For and to be chosen, depending on , suppose that the lemma fails, we find a sequence satisfying the assumptions from the lemma with and , but none of the three possibilities happens, namely,
| (5.30) |
| (5.31) |
for any satisfying the properties as in alternative (2) from the lemma, and
| (5.32) |
A direct consequence of Lemma 5.5 is that
| (5.33) |
With the same reasoning as in Remark 5.5, it suffices to consider the case when
We omit the subscript in the remaining of the proof.
Define , with the parameters and auxiliary functions from Subsection 5.2. Similar to the proofs for Lemma 3.4 and Lemma 4.8, for each , we find an -homogeneous harmonic function such that
| (5.34) |
We also have
Recall that denotes the rescaling of as in (2.5). With the definitions of , and (5.30), this implies
Now with (5.33), we have . The previous estimate leads to
From here, we apply orthogonality and Lemma 5.5 to conclude
| (5.35) |
Consequently,
Putting this into (5.34), we have
With Lemma 5.4 and Lemma 5.7, if we take , then
Note that we used (5.32) to absorb the error from Lemma 5.4.
Choosing universally small and large, we have
5.4. Almost symmetric solutions
Based on Lemma 5.5, the term from (5.15) has a significant projection into . When , we can apply Lemma 5.5 to see that . In this case, is negligible, and the lower bound on the projection is what leads to possibilities (1) and (2) in Lemma 5.1.
When , this argument no longer works. In this case, the extended profile from Definition 5.1 is ‘almost continuous’ long the big circle since by Lemma 5.5. This leads to information about the profile by our analysis of the problem in .
Lemma 5.9.
Given any , we can find two small constants, and , depending on , such that
if
then
| (5.36) |
for
satisfying
and
| (5.37) |
Recall the rotation operator from (2).
Compare with Remark 5.3, we see from (5.37) that ‘almost solves’ the thin obstacle problem up to an error of size .
Proof.
Let be a small constant to be chosen, depending on
With Lemma 5.3, we have
With our assumption on and , this implies
Similarly, we have
The change of sign in front of is due to the odd symmetry of with respect to
With Corollary B.2, if and are small, depending on , then we find universally bounded , and satisfying
| (5.38) |
and
| (5.39) |
where is a small parameter to be chosen, and
If we take , and suppose
then and both solve (5.5) in . With (5.39) and
we can apply the same argument as in Step 1 from the proof for Lemma 5.4 to conclude
if is fixed small enough.
A similar argument gives Together with the estimate in , we can apply the maximum principle in to get
Remark 5.6.
For as in the statement of Lemma 5.9, if we assume
then we can use the same argument as in Step 3 of the proof for Lemma 3.4 to find and with such that
satisfies
and
Consequently, if , then small perturbations from solve the thin obstacle problem outside a cone of -opening near (See Remark 5.3).
5.5. One-sided replacement
For profile of the form as in Remark 5.6, that is,
with
| (5.40) |
we only need to replace it in a small spherical cap near
To this end, we solve in from (5.2) the following
| (5.41) |
With this, we define the replacement of as:
Definition 5.4.
For satisfying (5.40), its replacement, , is defined as
Equivalently, the replacement is the minimizer of the energy
over
This replacement satisfies
| (5.42) |
Similar to Subsection 4.1, we define some auxiliary functions.
The projection of into (see (2.12)) is denoted by .
The function is the unique solution to
Corresponding to these, we define
which satisfies
Finally, let’s denote
With similar argument as in Subsection 4.1, we have the following properties:
Lemma 5.10.
Lemma 5.11.
Suppose that satisfies (5.40), and take with .
Then we can find a modulus of continuity, , such that
Corollary 5.2.
Under the same assumption as in Lemma 5.11, we have
By directly computing the inner product of and , we have
Lemma 5.12.
Note that in , thus is admissible in the minimization problem in Definition 5.4, we have
Lemma 5.13.
Suppose that satisfies (5.40), then
This implies
Similar to Subsection 4.2, we have
Definition 5.5.
Suppose that the coefficients of satisfy (5.40).
For , we say that is a solution -approximated by at scale if solves the thin obstacle problem (1.1) in , and
In this case, we write
We can localize the contact set of well-approximated solutions
Lemma 5.15.
Suppose that with small, and that satisfies (5.40).
We have
and
for universal small and big .
With these preparations, we have the following dichotomy similar to the one in Subsection 4.3.
Lemma 5.16.
There is a universal small constant , such that if and , then we have the following dichotomy:
-
(1)
either
and
-
(2)
or
for some
with and
The constants , and are universal.
Proof.
For and to be chosen, suppose the lemma is false, we find a sequence satisfying the hypothesis of the lemma with , but neither of the two alternatives happens.
This allows us to find
such that
| (5.43) |
6. Proof of main results
We begin with some preparatory propositions.
Proposition 6.1.
For a solution to the thin obstacle problem (1.1) in , suppose that its frequency at is , and that
There is a small universal , such that if then up to a normalization
-
(1)
either
-
(2)
or
for some .
Here is universal.
Recall the notion of normalization from Remark 1.1. The family of normalized solutions, , is given in (1.7).
Proof.
To begin with, let denote a small universal constant to be chosen, and let denote the constant from Lemma 5.9 corresponding to this . Choose such that . This choice of fixes , and as in the statement of Lemma 5.1.
Step 1: Initiation.
For satisfying the conditions in the proposition, let
Recall the notation for rescaling from (2.5), and the Weiss energy functional from (2.6).
Let be as in (5.1), then According to definitions in Subsection 5.2, we have
and
Consequently, if is small, then and as in Lemma 5.1. Moreover, by Lemma 5.7, we have
| (6.1) |
Step 2: Induction.
Suppose for , we have found such that , and . We can apply the trichotomy in Lemma 5.1 to .
If possibility (1) happens, we let
If possibility (2) happens, we let
In both cases, we let
We claim that until possibility (3) happens, Lemma 5.1 remains applicable. To be precise, we have
| (6.2) |
To see this claim, we first notice that all three comparisons are true when . It suffices to show that they stay true in the iteration.
Note that each time possibility (1) happens, and . Each time possibility (2) happens, we have We see that if , then the comparison between and stays true.
It remains to see the comparison between and . Note that decreases if possibility (2) happens, thus we only need to prove the comparison when possibility (1) happens. In this case, using Lemma 2.1 and our assumption that is a point with frequency , we have
With (6.1), this implies
Consequently, stays below if is chosen small.
In summary, the claim (6.2) holds.
From here we see that until , the double sequence satisfies the conditions in Lemma 2.2 with . In particular, if is chosen small, then is small.
Recall that the deviation in the coefficients of is comparable to , and that . If we denote
then stays in . By choosing smaller if necessary, we ensure that , as defined in (5.1), stays below .
Therefore, until , the conditions in Lemma 5.1 are satisfied, and we can iterate this lemma to continue the sequence .
In particular, if stays above indefinitely, we can apply the same argument in Section 5 of [SY2] to conclude
up to a normalization.
We now analyze the case when drops below
Step 3: Adjustment when .
Suppose this happens for the first time at step in the iteration, then possibility (2) from Lemma 5.1 happens at this step. In particular, we have
and
As a result, we have
Also note that in this case, the coefficients of deviates from those of by , the definition of in (5.1) gives
| (6.3) |
if is small.
If we denote by
where the coefficients are from Remark 5.4, then Lemma 5.5 gives
by our choice of before Step 1.
Depending on the size of , we divide the discussion into two cases.
Step 4: The case when each time the adjustment in Step 3 is made.
In this case, we define , then up to a rotation, we have
In particular, with we still have
Consequently, if each time the adjustment happens, after this adjustment, we have
and the induction in Step 2 can be continued, leading to
with the argument in Section 5 of [SY2] .
Step 5: The case when at one time the adjustment in Step 3 is made.
Suppose after the adjustment described in Step 3, we have
with .
In this case, with the reasoning in Remark 5.6, we find a solution to the thin obstacle problem such that
| (6.6) |
With (6.5), (6.6), and , we have, up to a rotation
From here, we fix the parameter by
and relabeling our sequence
Then
where the class is defined in Definition 5.5. Moreover, with solving the thin obstacle problem, we can apply Lemma 5.14 to get
| (6.7) |
If is chosen small enough, then from Lemma 5.16. Similar to Step 2, we apply Lemma 5.16 iteratively and obtain a sequence with
Note that if alternative (1) in Lemma 5.16 happens, we apply (6.7) to get
With a similar argument for comparison between and in claim (6.2), this implies
With a similar argument for comparison between and in claim (6.2), we have
Consequently, with Lemma 5.14, we have
Therefore, the double sequence satisfies the condition in Lemma 2.2 for , and we have
In particular, the deviation for coefficients of is of order . Consequently, if is universally small, the conditions on the coefficients from Lemma 5.16 are satisfied, and Lemma 5.16 can be applied indefinitely. With the same argument in Section 5 of [SY2], we conclude
up to a normalization for some ∎
Proposition 6.2.
For a solution to the thin obstacle problem (1.1) in , suppose that its frequency at is , and that
for some and , where is the universal constant from Proposition 6.1.
There is a small universal , such that if then up to a normalization
for some .
Here is universal.
With these two propositions in hand, we sketch the proofs for the main results.
Proof of Theorem 1.1.
For a -homogeneous solution as in Theorem 1.1, we see that if with and from Proposition 6.1 and Proposition 6.2 respectively, then
for some .
From here the homogeneity of leads to ∎
Proof of Theorem 1.2.
With this rate of convergence, the stratification in Theorem 1.3 follows from the Whitney extension lemma. See, for instance, [GP, CSV]. We sketch the proof for the more precise Remark 1.3:
Proof of Remark 1.3.
Case 1: the solution blows up to at .
With the rate of convergence in Theorem 1.2 and Lemma 5.8, we see that in a ball of radius , the free boundary is trapped between two parallel lines with distance . This is the desired -regularity of the free boundary at a point where is the blow-up profile.
Case 2: the solution blows up to at .
Now suppose is a blow-up profile at , we need to find such that If the conditions and are not degenerate, the conclusion follows from a standard blow-up argument.
We give the proof when , the doubly critical profile from (4.4).
Suppose, on the contrary, that there is a sequence With the notation from (2.5), we define
Appendix A Fourier expansion in spherical caps
In this appendix, we study the decay of a harmonic function in a slit domain near the boundary of a spherical cap if some of its Fourier coefficients vanish along a smaller cap.
Recall that we use as the coordinate system for , where and are the polar coordinates for the -plane. For small , the -spherical cap is defined as
The main result of this appendix is
Lemma A.1.
For two small parameters with , suppose that is a bounded solution to
If we have, for ,
then
for a constant depending only on
Recall the notations for slit domains and homogeneous harmonic functions in slit domains from (2.10) and (2.13).
Proof.
With the functions from (2.17), we define, for ,
where satisfies , , and
| (A.1) |
It is elementary to verify that is -homogeneous and harmonic in .
By the iterative relation (A.1), we can find a universal large constant such that
As a result, by taking larger if necessary, we have
On the other hand, we have in , which gives
if is small and For the same comparison follows directly from the fact that for all if
Consequently, the ratio satisfies
and
by choosing larger if necessary.
For each , let denote the solution to
With the maximum principle, we have
which implies
Now with being a basis for , for as in the statement of the lemma, we can write where
For , this implies
for a constant depending on .
With our assumption on , we have for . The conclusion follows by observing
∎
Appendix B The thin obstacle problem in
Our treatment of solutions near relies on a fine analysis of the thin obstacle problem in tiny spherical caps around . In the limit, this problem leads to the thin obstacle problem in with prescribed expansion at infinity.
In this section, we use to denote the polar coordinates of . The notations for slit domains from (2.9) and (2.10) carry over with straightforward modifications. We will also take advantage of the functions from (1.6) and (2.17). Similar to the functions in (2.16), in this appendix, we denote the derivatives of by the following555The two bases and are related by :
The following two derivatives are singular near :
| (B.1) |
Let , then solves the thin obstacle problem in if and only if
| (B.2) |
For , the translation operator is defined by its action on points, sets, and functions in the following manner:
In this appendix, for , we study solutions to the thin obstacle problem in with data at infinity:
| (B.3) |
The starting point is the following proposition:
Proposition B.1.
For , there is a unique solution to (B.3).
For this solution, there is a universal constant such that
Moreover, we can find satisfying such that
Recall the harmonic functions with negative homogeneities from (2.17).
Remark B.1.
For simplicity, we will denote the coefficients by or simply when there is no ambiguity.
Proof.
Step 1: Uniqueness.
Suppose that and are two solutions to (1.1) in with With a similar argument as in Lemma 3.1, we find such that
Let be the Kelvin transform of with respect to . Then is a harmonic function in the slit domain , as defined in (2.11). Applying Theorem 2.1, we have which implies
From here we have bythe maximum principle.
Step 2: A barrier function.
Rewrite in the basis as .
For to be chosen, if we let denote the solution to
and define
then Taylor’s Theorem gives
Choosing large universally, then
for a universal large .
By choosing larger, if necessary, it is elementary to verify that satisfies condition (B.2), and consequently, solves the thin obstacle problem in
Step 3: Existence, universal boundedness, and localization of contact set.
For large , let be the solution to the thin obstacle problem (1.1) in with along .
By the maximum principle, we have
| (B.4) |
if is large. Consequently, this family is locally uniformly bounded. Therefore, we can extract a subsequence converging to some locally uniformly on . This limit solves the thin obstacle problem in .
With (B.4), we have and for a universal . Thus we have
Along , we have . Thus the maximum principle, applied in the domain, gives
for a universal constant . In particular, is the unique solution to (B.3), according to Step 1.
Step 4: Finer expansion.
Let be the Kelvin transform of with respect to . Results from the previous step implies that is a harmonic function in the slit domain . An application of Theorem 2.1 gives universally bounded and such that
Inverting the Kelvin transform, we have
∎
For the solution from the previous proposition, we have precise information on its first two Fourier coefficients along big circles:
Corollary B.1.
Proof.
For , define . Then
With these properties, we have, for ,
Along , we have , , and , thus
Along , we have and Combining all these we have
Sending gives the first conclusion. The second follows from a similar argument. ∎
The following lemma is one of the main reasons for the restriction to 3d in the main part of this work:
Lemma B.1.
Given functions
with suppose that and are solutions to (B.3) with and as data at infinity, respectively.
Assume and , then we can find universally bounded constants , and such that
Recall the definition of ’s from Remark B.1.
Proof.
Step 1: Two auxiliary polynomials.
Since is an entire solution to the thin obstacle problem of order at infinity, we see that is a polynomial of degree 5. Meanwhile, a direct computation gives that
where is a polynomial of degree , and is a -homogeneous rational function for .
Similarly, corresponding to and , we have
where is a polynomial of degree , and is a -homogeneous rational function for . Moreover, we have
also a real polynomial of degree 5.
With and , a direct computation gives
| (B.6) |
Step 2: Half-space solutions.
With (B.6), we show that up to a translation, must be a half-space solution. Since in according to Proposition B.1, it suffices to show that has only one component.
Suppose, on the contrary, that
Note that the second component has to terminate in finite length since in .
On , we have . Thus for . On the contrary, on , and . Moreover, since and on , we must have at some point . Thus . Note that is a root of multiplicity at least 2. Together with the roots , this implies that cannot have other roots. See Figure 4.
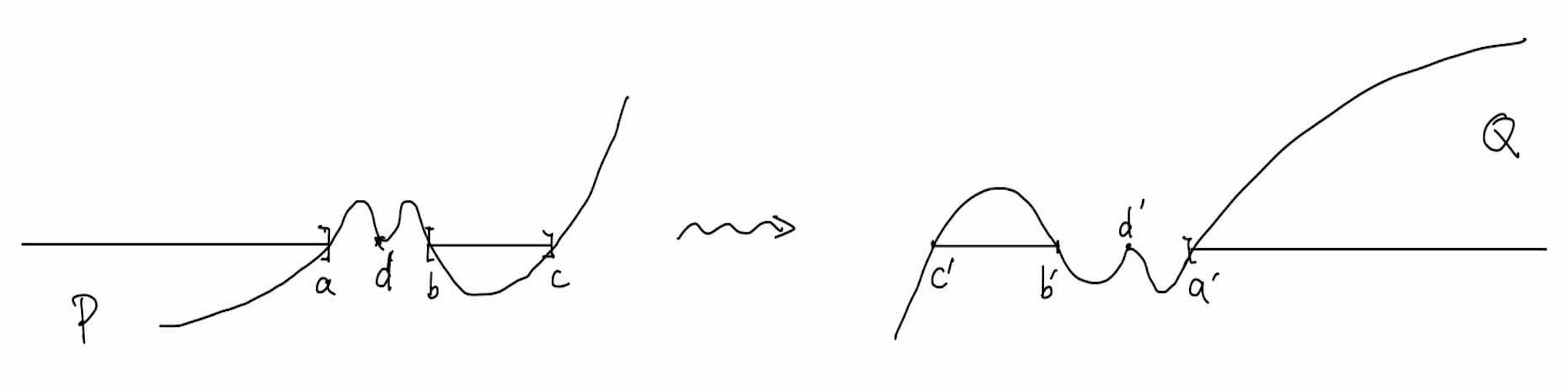
With the symmetry described in (B.6), if we let and , then while on . This implies on while . However, this implies that must vanish at some point on and so does . This is a contradiction.
As a result, must be a half line. A similar result holds for With (B.6), we see that if , then
Step 4: Conclusion.
A perturbation of the previous lemma leads to the following corollary. Recall notations from (B.1) and Remark B.1.
Corollary B.2.
Given with , we set
and
Then there is a universal modulus of continuity, , such that
for universally bounded and satisfying
| (B.7) |
Proof.
Suppose there is no such , we find a sequence such that the corresponding satisfy
| (B.8) |
but for any bounded and satisfying (B.7), we have
| (B.9) | ||||
Up to a subsequence, we have
If we take
and denote by the solution to (B.3) with data at infinity, then by Proposition B.1, we have
Up to a subsequence, we have locally uniformly converge to , a solution to the thin obstacle problem in . Moreover, we have
Thus is the solution to (B.3) with data at infinity.
References
- [Alm] Almgren, F. Dirichlet’s problem for multiple valued functions and the regularity of mass minimizing integral currents. Minimal submanifolds and geodesics (Proc. Japan-United States Sem., Tokyo, 1977), 1-6, North-Holland, Amsterdam-New York, 1979.
- [AC] Athanasopoulos, I.; Caffarelli, L.A. Optimal regularity of lower dimensional obstacle problems. Zap. Nauchn. Sem. S.-Petersburg. Otdel. Mat. Inst. Steklov. 310 (2004), Kraev. Zadachi Mat. Fiz. i Smezh. Vopr. Teor. Funktzs. 35, 49-66.
- [ACS] Athanasopoulos, I.; Caffarelli, L.A.; Salsa, S. The structure of the free boundary for lower dimensional obstacle problems. Amer. J. Math. 130 (2008), no. 2, 485-498.
- [CSV] Colombo, M.; Spolaor, L.; Velichkov, B. Direct epiperimetric inequalities for the thin obstacle problem and applications. Comm. Pure Appl. Math. 73 (2020), no. 2, 384-420.
- [D] De Silva, D. Free boundary regularity for a problem with right hand side. Interfaces Free Bound. 13 (2011), no. 2, 223-238.
- [DS1] De Silva, D.; Savin, O. Boundary Harnack estimates in slip domains and applications to thin free boundary problems. Rev. Mat. Iberoam. 32 (2016), no. 3, 891-912.
- [DS2] De Silva, D.; Savin, O. regularity of certain thin free boundary problems. Indiana Univ. Math. J. 64 (2015), no. 5, 1575-1608.
- [DL] Duvaut, G.; Lions, J.-L. Inequalities in mechanics and physics. Grundlehren der Mathematischen Wissenschaften, 219. Springer-Verlag Berlin-New York, 1976.
- [FeR] Fernández-Real, X.; Ros-Oton, X. Free boundary regularity for almost every solution to the Signorini problem. Arch. Ration. Mech. Anal. to appear.
- [FRS] Figalli, A.; Ros-Oton, X.; Serra, J. Generic regularity of free boundaries for the obstacle problem. Publ. Math. Inst. Hautes Études Sci. 132 (2020), 181-292.
- [FoS1] Focardi, M.; Spadaro, E. On the measure and structure of the free boundary of the lower dimensional obstacle problem. Arch. Ration. Mech. Anal. 230 (2018), no. 1, 125-184.
- [FoS2] Focardi, M.; Spadaro, E. Correction to : On the measure and structure of the free boundary of the lower dimensional obstacle problem. Arch. Ration. Mech. Anal. 230 (2018), no. 2, 783-784.
- [GP] Garofalo, N.; Petrosyan, A. Some new monotonicity formulas and the singular set in the lower dimensional obstacle problem. Invent. Math. 177 (2009), no. 2, 415-461.
- [KPS] Koch, H.; Petrosyan, A.; Shi, W. Higher regularity of the free boundary in the elliptic Signorini problem. Nonlinear Anal. 126 (2015), 3-44.
- [PSU] Petrosyan, A.; Shahgholian, H.; Uraltseva, N. Regularity of free boundaries in obstacle-type problems. Graduate Studies in Mathematics, 136. American Mathematical Society, Providence, RI, 2012.
- [R] Richardson, D. Variational problems with thin obstacles. Thesis-The University of British Columbia 1978.
- [SY1] Savin, O.; Yu, H. On the fine regularity of the singular set in the nonlinear obstacle problem. Preprint: arXiv:2101.11759.
- [SY2] Savin, O.; Yu, H. Contact points with integer frequencies in the thin obstacle problem. Preprint: arXiv:2103.04013.
- [SY3] Savin, O.; Yu, H. Regularity of the singular set in the fully nonlinear obstacle problem. J. Euro. Math. Soc. to appear.
- [SY4] Savin, O.; Yu, H. Free boundary regularity in the triple membrane problem. Preprint: arXiv:2002.10628.
- [Sig] Signorini, A. Questioni di elasticità non linearizzata e semilinearizzata. Rend. Mat. e Appl. 18 (1959), 95-139.
- [U] Uraltseva, N. On the regularity of solutions of variational inequalities. Uspekhi Mat. Nauk 42 (1987), no. 6, 151-174.
- [W] Weiss, G.S. A homogeneity improvement approach to the obstacle problem. Invent. Math. 138 (1999), no. 1, 23-50.