Geodesics and visual boundary of horospherical products
Abstract
We study the geometry of horospherical products by providing a description of their distances, geodesics and visual boundary. These products contains both discrete and continuous examples, including Cayley graphs of lamplighter groups and solvable Lie groups of the form , where and are two simply connected, nilpotent Lie groups.
1 Introduction
A horospherical product is a metric space constructed from two Gromov hyperbolic spaces and , it is included in their Cartesian product and can be seen as a diagonal in it. Let and be two Busemann functions. The horospherical product of and , denoted by , is defined as the set of points in such that the two Busemann functions add up to zero, namely
The level-lines of the Busemann functions are called horospheres, one can see the horospherical product as crossed with an upside down copy of in parallel to these horospheres. We will call height function the opposite of the chosen Busemann function.
Let be a simply connected, nilpotent Lie group and let be a derivation of whose eigenvalues have positive real parts. Then is called a Heintze group and is Gromov hyperbolic, they are the only examples of negatively curved Lie groups. Let and are two Heintze groups, we can choose the Busemann functions to be such that we have . Then we obtain
When , the corresponding Heintze group is a hyperbolic plan , and as their horospherical products we obtain the Sol geometries, one of the eight Thurston’s geometries. We can also build Diestel-Leader graphs and the Cayley 2-complexes of Baumslag-Solitar groups as the horospherical products of trees or hyperbolic plans. In the second section of [29], the last three sets of examples are well detailed, and presented as horocyclic products of either regular trees or the hyperbolic plan . We choose the name horospherical product instead of horocyclic product since in higher dimension, level-sets according to a Busemann function are not horocycles but horospheres.
As Woess suggested in the end of [29], we explore here a generalization for horospherical products. The horospherical product construction can be realized for more than two spaces, see [1] for a study of the Brownian motion on a multiple horospherical product of trees. However in this work we will stay in the setting of two Gromov hyperbolic spaces.
To study the geometry of horospherical products we require that our components and are two proper, geodesically complete, Gromov hyperbolic, Busemann spaces. A Busemann space is a metric space where the distance between any two geodesics is convex, and a metric space is geodesically complete if and only if a geodesic segment can be prolonged into a geodesic line . The Busemann hypothesis suits with the definition of horospherical product since we require the two heights functions to be exactly opposite. Furthermore, adding the assumptions that and are geodesically complete allows us to prove that the horospherical product is connected (see Lemma 3.11).
In the next part of this introduction we present our main results, which hold when and are two proper, geodesically complete, Gromov hyperbolic, Busemann spaces. It covers the case where and are solvable Lie groups of the form .
In [12] and [13], using the horospherical product structure of treebolic space, Farb and Mosher proved a rigidity results for quasi-isometries of . In [10] and [11], Eskin, Fisher and Whyte obtained a similar rigidity results for the Diestel-Leader graphs and the Sol geometries, again using their horospherical product structure.
Besides being results on their own, the tools we develop in this paper are used in [14] to study the quasi-isometry classification of the aforementioned horospherical products. In [14] we generalise the results obtained by Eskin, Fisher and Whyte in [10], and provide new quasi-isometric classifications for some family of solvable Lie groups.
There are many possible choices for the distance on in this paper we work with a family of length path metrics induced by distances on (see Definition 3.2). We require that the distance on comes from an admissible norm on (e.g. any norm). Our first result describes these distances.
Theorem A.
Let be an admissible distance on . Then there exists a constant depending only on the metric spaces such that for all :
Therefore, given two admissible distances and , the horospherical products and are roughly isometric, which means that there exists a -quasi-isometry between them, for a constant . Le Donne, Pallier and Xie proved in [22] that for the solvable groups , changing the left-invariant Riemannian metric results in the identity map being a rough similarity.
Theorem A is one of the tools we use in [14], where we prove a geometric rigidity property of quasi-isometries between families of horospherical products. This property leads to quasi-isometric invariants in such spaces, and a first result in the quasi-isometry classification of some solvable Lie groups.
Throughout this paper we provide a coarse description of geodesics and of the visual boundary of a broad family of horospherical products.
Following the characterisation of the distances on horospherical products, we describe the shape of geodesic segments.
Theorem B.
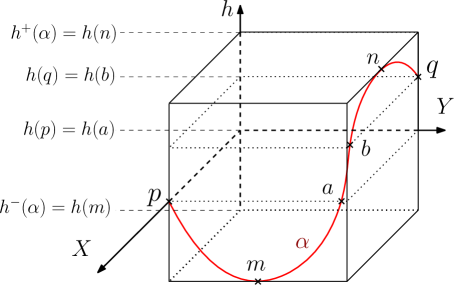
Let and be two proper, geodesically complete, -hyperbolic, Busemann spaces and let be an admissible distance on . Let and be two points of and let be a geodesic segment of linking to . There exists a constant depending only on , and there exist two vertical geodesics and such that:
-
1.
If then is in the -neighbourhood of ;
-
2.
If then is in the -neighbourhood of ;
-
3.
If then at least one of the conclusions of or holds.
Specifically and can be chosen such that is close to and is close to .
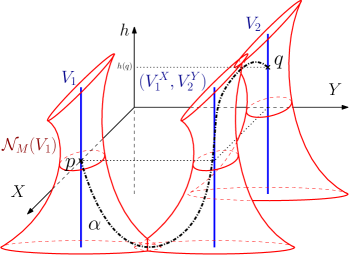
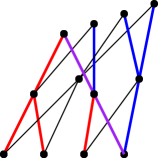
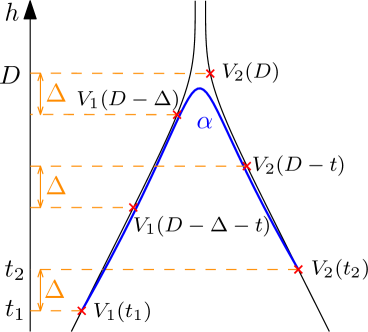
An example is illustrated on Figure 1 for . Coarsely speaking, Theorem B ensures that any geodesic segment is constructed as the concatenation of three vertical geodesics. This result is similar to the Gromov hyperbolic case, where a geodesic segment is in the constant neighbourhood of two vertical geodesics. This result leads us to the existence of unextendable geodesics, which are called dead-ends. Geodesics shapes was already well-known in lamplighter groups. In the case of Sol, we recover, up to an additive constant, Troyanov’s description of global geodesics (see [27]).
The horospherical product between and is isometric to , therefore given any vertical geodesic of , is an embedded copy of in . A geodesic line of looks either like a geodesic of or like a geodesic of .
Corollary C.
Let and be two proper, geodesically complete, -hyperbolic, Busemann spaces. Then there exists depending only on such that for all geodesic line at least one of the two following statements holds.
-
1.
is included in a constant -neighbourhood of a geodesics contained in a embedded copy of ;
-
2.
is included in a constant -neighbourhood of a geodesics contained in a embedded copy of .
If a geodesic verifies both conclusions, it is in the -neighbourhood of a vertical geodesic of .
Let , the visual boundary of with respect to the base point , denoted by , stands for the set of equivalence classes of geodesic rays starting at . Consequently to the description of geodesic segments, we obtain that for any geodesic ray of there exists a vertical geodesic ray at finite distance of . Therefore we classify all possible shapes for geodesic rays, then we give a description of the visual boundary of .
Theorem D.
Let and be two proper, geodesically complete, -hyperbolic, Busemann spaces. Let , and let be the horospherical product with respect to and . Then the visual boundary of with respect to any point can be decomposed as:
When and we obtain that
In the case of Sol, the last result is similar to Proposition 6.4 of [27]. However, unlike Troyanov in his work, we are focusing on minimal geodesics and not on local ones. One can see that this visual boundary neither depends on the chosen admissible distance nor on the base point .
Framework
The paper is organized as follows.
Acknowledgement
This work was supported by the University of Montpellier.
I thank my two advisers Jeremie Brieussel and Constantin Vernicos for their many relevant reviews and comments.
2 Context
The goal of this section is to present what is a Gromov hyperbolic, Busemann space and what are vertical geodesics in such a space. Let be a proper, geodesic, metric space.
2.1 Gromov hyperbolic spaces
A geodesic line, respectively ray, segment, of is the isometric image of a Euclidean line, respectively half Euclidean line, interval, in . By slight abuse, we may call geodesic, geodesic ray or geodesic segment, the map itself, which parametrises our given geodesic by arclength.
Let be a non-negative number. Let , and be three points of . The geodesic triangle is called -slim if any of its sides is included in the -neighbourhood of the remaining two. The metric space is called -hyperbolic if every geodesic triangle is -slim. A metric space is called Gromov hyperbolic if there exists such that is a -hyperbolic space.
An important property of Gromov hyperbolic spaces is that they admit a nice compactification thanks to their Gromov boundary. We call two geodesic rays of equivalent if their images are at finite Hausdorff distance. Let be a base point. We define the Gromov boundary of as the set of families of equivalent rays starting from . The boundary does not depend on the base point , hence we will simply denote it by . Both and , are compact endowed with the Hausdorff topology. For more details, see [16] or chap.III H. p.399 of [3].
Let us fix a point on the boundary. We call vertical geodesic ray, respectively vertical geodesic line, any geodesic ray in the equivalence class , respectively with one of its rays in . The study of these specific geodesic rays is central in this work.
2.2 Busemann spaces and Busemann functions
A metric space is Busemann if and only if for every pair of geodesic segments parametrized by arclength and , the following function is convex:
It is a weaker assumption than being CAT (Theorem of [15]), however it implies that is uniquely geodesic. See Chap.8 and Chap.12 of [23] for more details on Busemann spaces.
This convex assumption removes some technical difficulties in a significant number of proofs in this work. If is a Busemann space in addition to being Gromov hyperbolic, for all there exists a unique vertical geodesic ray, denoted by , starting at . In fact the distance between two vertical geodesics starting at is a convex and bounded function, hence decreasing and therefore constant equal to .
The construction of the horospherical product of two Gromov hyperbolic space and requires the so called Busemann functions. Their definition is simplified by the Busemann assumption. Let us consider , the Gromov boundary of (which, in this setting, is the same as the visual boundary). Both the boundary and , endowed with the natural Hausdorff topology, are compact. Then, given a point on the boundary, and a base point, we define a Busemann function with respect to and . Let be the unique vertical geodesic ray starting from .
This function computes the asymptotic delay a point has in a race towards against the vertical geodesic ray starting at . The horospheres of with respect to are the level-sets of . These horospheres depend on the previously chosen couple of .
2.3 Heights functions and vertical geodesics
In this section we fix , a proper, geodesic, -hyperbolic space, a base point and a point on the boundary of . We call height function, denoted by , the opposite of the Busemann function, .
Let us write Proposition 2 chap.8 p.136 of [16] with our notations.
Proposition 2.1 ([16], chap.8 p.136).
Let be a hyperbolic proper geodesic metric space. Let and , then:
-
1.
-
2.
,
-
3.
.
Furthermore, a geodesic ray is in if and only if its height tends to .
Corollary 2.2.
Let be a hyperbolic proper geodesic metric space. Let and , and let be a geodesic ray. The two following properties are equivalent:
-
1.
-
2.
.
Proof.
As for any geodesic ray there exists such that , this proposition is a particular case of Proposition 2.1. ∎
An important property of the height function is to be Lipschitz.
Proposition 2.3.
Let and . The height function is Lipschitz:
Proof.
By using the triangle inequality we have for all :
The result follows by exchanging the roles of and . ∎
From now on, we fix a given and a given . Therefore we simply denote the height function by instead of .
Proposition 2.4.
Let be a vertical geodesic of . We have the following control on the height along :
Proof.
Using Proposition 2.4 with and , the next corollary holds.
Corollary 2.5.
Let be a vertical geodesic parametrised by arclength and such that . We have:
From now on, will be a proper, geodesic, Gromov hyperbolic, Busemann space. Hence the height function is convex along a vertical geodesic.
Property 2.6 (Prop. in p.263 of Papadopoulos [23]).
Let be a non negative number. Let be a proper -hyperbolic, Busemann space. For every geodesic , the function is convex.
The Busemann hypothesis implies that the height along geodesic behaves nicely. This means that we can drop the constant from Corollary 2.5. It is one of the main reasons why we require our spaces to be Busemann spaces.
Proposition 2.7.
Let be a -hyperbolic and Busemann space and let be a path of . Then is a vertical geodesic if and only if such that .
Proof.
Let be a vertical geodesic in . By Property 2.6 we have that is convex. Furthermore, from Corollary 2.5, we get . Thereby the bounded convex function is constant. Then there exists a real number such that .
We now assume that there exists a real number such that . Therefore, for all real numbers and we have . By definition is a connected path, hence which implies with the previous sentence that , then is a geodesic. Furthermore , which implies by definition that is a vertical geodesic.
∎
A metric space is called geodesically complete if all its geodesic segments can be prolonged into geodesic lines. In is geodesically complete in addition to its other assumptions, then any point of is included in a vertical geodesic line.
Property 2.8.
Let be a -hyperbolic Busemann geodesically complete space. Then for all there exists a vertical geodesic such that contains
Proof.
Let us consider in this proof and , from which we constructed the height of our space . Then by definition we have . Proposition 12.2.4 of [23] ensures the existence of a geodesic ray starting at . Furthermore as is geodesically complete can be prolonged into a geodesic such that , hence is a vertical geodesic. ∎
3 Horospherical products
In this part we generalise the definition of horospherical product, as seen in [10] for two trees or two hyperbolic planes, to any pair of proper, geodesically complete, Gromov hyperbolic, Busemann spaces. We recall that given a proper, -hyperbolic space with distinguished and , we defined the height function on in Section 2.3 from the Busemann functions with respect to and .
3.1 Definitions
Let and be two hyperbolic spaces. We fix the base points and the directions in the boundaries . We consider their heights functions and respectively on and .
Definition 3.1 (Horospherical product).
The horospherical product of and , denoted by is
From now on, with slight abuse, we omit the base points and fixed points on the boundary in the construction of the horospherical product. The metric space refers to a horospherical product of two Gromov hyperbolic Busemann spaces. We choose to denote and the two components in order to identify easily which objects are in which component. In order to define a Horospherical product in a wider settings, one might only a Busemann function on a metric space.
One of our goals is to understand the shape of geodesics in according to a given distance on it. In a cartesian product the chosen distance changes the behaviour of geodesics. However we show that in a horopsherical product the shape of geodesics does not change for a large family of distances, up to an additive constant.
We will define the distances on as length path metrics induced by distances on . A lot of natural distances on the cartesian product come from norms on the vector space . Let be such a norm and let us denote , which means that for all couples we have that . The length of a path in the metric space is defined by:
Where is the set of subdivisions of . Then the -path metrics on is:
Definition 3.2 (The -path metrics on ).
Let be a norm on the vector space . The -path metric on , denoted by , is the length path metric induced by the distance on . For all and in we have:
| (2) |
Any norm on can be normalised such that . We call admissible any such norm which satisfies an additional condition.
Definition 3.3 (Admissible norm).
Let be a norm on the vector space such that . The norm is called admissible if and only if for all real and we have:
| (3) |
Since all norms are equivalent in , there exists a constant such that:
| (4) |
As an example, any norm with is admissible.
Property 3.4.
Let be an admissible norm on the vector space . Let be a connected path. Then we have:
Proof.
Let be a connected path and a subdivision of , then by the definition of the length:
Any couple of subdivision and can be merge into a subdivision that contains and . Furthermore the last inequality holds for any subdivision , hence by taking the supremum on all the subdivisions we have:
Furthermore, we have that , , hence:
Since last inequality holds for any subdivision , we have that .
∎
The definition of height on and is used to construct a height function on .
Definition 3.5 (Height on ).
The height of a point is defined as .
On Gromov hyperbolic spaces we have that de distance between two points is greater than their height difference. The same occurs on horospherical products given with an admissible norm. Let and be two points of , and let us denote their height difference.
Lemma 3.6.
Let be an admissible norm, and let the distance on induced by . Then the height function is -Lipschitz with respect to the distance , i.e.,
| (5) |
Proof.
Since is admissible we have:
∎
Following Proposition 2.7, we define a notion of vertical paths in a horospherical product.
Definition 3.7 (Vertical paths in ).
Let be a connected path. We say that is vertical if and only if there exists a parametrisation by arclength of such that for all .
Actually, a vertical path of a horospherical product is a geodesic.
Lemma 3.8.
Let be an admissible norm. Let be a vertical path. Then is a geodesic of .
Proof.
Let . The path is vertical therefore . Since is connected and parametrised by arclength, we have that:
Then , which ends the proof. ∎
Such geodesics are called vertical geodesics. Next proposition tells us that vertical geodesics of are exactly couples of vertical geodesics of and .
Proposition 3.9.
Let be an admissible norm and let be a geodesic of . The two following properties are equivalent:
-
1.
is a vertical geodesic of
-
2.
and are respectively vertical geodesics of and .
Proof.
Let us first assume that be a vertical geodesic, we have for all real that , hence :
| (6) |
Similarly we have that . Using that is admissible and that is a geodesic we have:
Combine with inequality (6) we have that , hence is a vertical geodesic of . Similarly, is a vertical geodesic .
Let us assume that and are vertical geodesics of and . Let , we have:
Where is the set of subdivision of . Hence the proposition is proved. ∎
This previous result is the main reason why we are working with distances which came from admissible norms.
Definition 3.10.
A geodesic ray of is called vertical if it is a subset of a vertical geodesic.
A metric space is called geodesically complete if all its geodesic segments can be prolonged into geodesic lines. If and are proper hyperbolic geodesically complete Busemann spaces, their horospherical product is connected.
Property 3.11.
Let and be two proper, geodesically complete, -hyperbolic, Busemann spaces. Let be their horospherical product. Then is connected, furthermore .
Proof.
Let and be two points of . From Property 2.8, there exists a vertical geodesic such that is in the image of , and there exists a vertical geodesic such that is in the image of . Let be the point of at height . Let be a geodesic of linking to and let be a geodesic of linking to . We will connect to with a path composed with pieces of , , and .
We first link to with and . It is possible since is parametrised by its height. More precisely we construct the following path :
Since is parametrised by its height, we have which implies . Furthermore, using the fact that the height is 1-Lipschitz, we have :
Hence is a connected path such that . Hence is a connected path linking to . Using Property 3.4 on provides us with:
We recall that by definition . We show similarly that is a connected path linking to such that:
Hence, there exists a connected path linking to such that:
| (7) |
∎
However if the two components and are not geodesically complete, may not be connected.
Example 3.12.
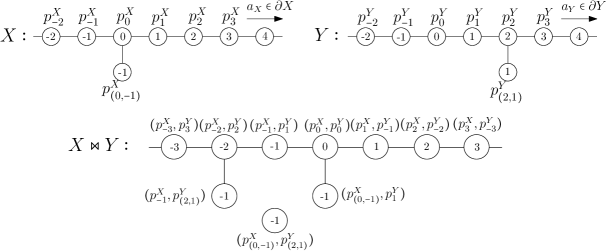
Let and be two graphs, constructed from an infinite line (indexed by ) with an additional vertex glued on the for and on the for . Their construction are illustrated in Figure 4. They are two 0-hyperbolic Busemann spaces which are not geodesically complete. Let be the vertex indexed by in , and let be the vertex indexed by in . We choose them to be the base points of and . Since and contain two points each, we fix in both cases the point of the boundary or to be the one that contains the geodesic ray indexed by . On figure 4, we denoted the height of a vertex inside this one. Then the horospherical product taken with the path metric is not connected. Since some vertices of and are not contained in a vertical geodesic, one may not be able to adapt its height correctly while constructing a path joining to .
It is not clear that a horospherical product is still connected without the hypothesis that and are Busemann spaces. In that case we would need a "coarse" definition of horospherical product. Indeed, the height along geodesics would not be smooth as in Proposition 2.7, therefore the condition requiring to have two exact opposite heights would not suits.
3.2 Examples
A Heintze group is a Lie group of the form defined by the action on , , with a simply connected nilpotent Lie group and with a derivation whose eigenvalues have positive real parts. Heintze proved in [20] that any simply connected, negatively curved Lie group is isomorphic to a Heintze group.
Moreover, a Busemann metric space is simply connected, hence any Gromov hyperbolic, Busemann Lie group is isomorphic to a Heintze group. Consequently, Heintze groups are natural candidates for the two components from which a horospherical product is constructed. In his paper [30], Xie classifies the subfamily of all negatively curved Lie groups up to quasi-isometry.
Let and be two Heintze groups, then is isomorphic to , where is the block diagonal matrix containing and on its diagonal. In fact, We have that is the group defined by the action on , . Let , be the two base points, and let and be there respective vertical geodesic rays corresponding to the chosen Busemann functions. Then we have that for all , . Under this setting we have that
Thanks to this characterisation, we show that is a subgroup of . Furthermore the following map is an isomorphism
where is determined by the action . Therefore, we have that
The Sol geometries are specific cases of such solvable Lie groups when for , and where the matrices are positive reals. In this context, for we have that is the Log model of a real hyperbolic plan, otherwise stated the Riemannian manifold with coordinates endowed with the Riemannian metric . Then is a Sol geometry, or also the Riemannian manifold with coordinates endowed with the Riemannian metric
A first discrete example of horospherical product is the family of Diestel-Leader graphs defined by with and where and are regular trees. We see and as connected metric spaces with the usual distance on them. By choosing half of the path metric on , this horospherical product becomes a graph with the natural distance on it. Indeed, the set of vertices of is then defined by the subset of couples of vertices of included in . In this horospherical product, two points and of are connected by an edge if and only if and are connected by an edge in and if and are connected by an edge in . Furthermore, when , there is a one-to-one correspondence between and the Cayley graph of the lamplighter group , see [28] for further details.
Depending on the case, we either used the path metric or the path metric. However, we will see in Proposition 4.14 that it does not matter, up to an additive uniform constant. Quasi-isometric rigidity results in the Diestel-Leader graphs and the Sol geometry have been proved using the same techniques in [10] and [11].
The horospherical product of a hyperbolic plane and a regular tree has been studied as the 2-complex of Baumslag-Solitar groups in [2], they are called the treebolic spaces. The distance they choose on the treebolic spaces is similar to ours. In fact our Proposition 4.13 and their Proposition page 9 (in [2]) tell us they are equal up to an additive constant. Rigidity results on the quasi-isometry classification of the treebolic spaces were brought up in [12] and [13].
4 Estimates on the length of specific paths
4.1 Geodesics in Gromov hyperbolic Busemann spaces
This section focuses on length estimates in Gromov hyperbolic Busemann spaces. The central result is Proposition 4.9, which presents a lower bound on the length of a path staying between two horospheres. Before moving to the technical results of this section, let us introduce some notations.
Notation 4.1.
Unless otherwise specified, will be a Gromov hyperbolic Busemann geodesically complete proper space. Let be a connected path. Let us denote the maximal height and the minimal height of this path as follows:
Let and be two points of , we denote the height difference between them by:
We define the relative distance between two points and of as:
Let us denote a vertical geodesic containing , we will assume it to be parametrised by arclength. Thanks to Proposition 2.7 we choose a parametrisation by arclength such that .
The relative distance between two points quantifies how far a point is from the nearest vertical geodesic containing the other point.
In the sequel we want to apply the slim triangles property on ideal triangles, hence we need the following result of [5].
Property 4.2 (Proposition page of [5]).
Let and be three points of . Let be three geodesics of linking respectively to , to , and to . Then every point of is at distance less than from the union .
Next lemma tells us that in order to connect two points, a geodesic needs to go sufficiently high. This height is controlled by the relative distance between these two points.
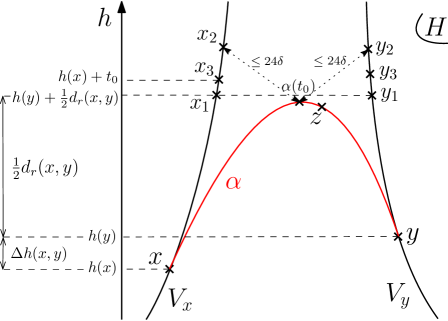
Lemma 4.3.
Let be a -hyperbolic and Busemann metric space, let and be two elements of such that , and let be a geodesic linking to . Let us denote , the point of at height and the point of at the same height . Then we have:
-
1.
-
2.
-
3.
-
4.
.
Proof.
The lemma and its proof are illustrated in Figure 7. Following Property 4.2, the triple of geodesics , and is a -slim triangle. Since the sets and are closed sets covering , their intersection is non empty. Hence there exists , and such that and . Let us first prove that is close to . By the triangle inequality we have that:
Let us denote the point of at height , and the point of at height . Then by the triangle inequality:
| (8) |
In the last inequality we used that , which holds by the definition of . We show in the same way that . By the triangle inequality we have . As the height function is Lipschitz we have , which provides us with:
| (9) |
In particular it gives us that . We are now ready to prove the first point using inequalities (8) and (9):
The second point of our lemma is proved as follows:
The proof of is similar, and is obtained from and by the triangle inequality. ∎
The next lemma shows that in the case where a geodesic linking to is almost vertical until it reaches the height .
Lemma 4.4.
Let be a -hyperbolic and Busemann space. Let and be two points of such that . We define to be the point of the vertical geodesic at the same height as . Then:
| (10) |
Proof.
Since is -hyperbolic, the geodesic triangle is -slim. Then there exists , and such that and . Hence, . Let and be two vertical geodesic rays respectively contained in and and respectively starting at and . Then Property 4.2 used on the ideal triangle implies that , therefore we have . Then holds. It follows that and are close to each other:
| (11) |
Then we give an estimate on the distance between and :
| (12) |
However and , therefore:
| (13) |
Combining inequalities (12) and (13) we have . Then:
∎
We are now able to prove the estimates of the next section.
4.2 Length estimate of paths avoiding horospheres
Consider a path and a geodesic sharing the same end-points in a proper, Gromov hyperbolic, Busemann space. We prove in this section that if the height of does not reach the maximal height of the geodesic , then is much longer than . Furthermore, its length increases exponentially with respect to the difference of maximal height between and . To do so, we make use of Proposition p400 of [3], which we recall here. Let us denote by the length of a path .
Proposition 4.5 ([3]).
Let be a -hyperbolic geodesic space. Let be a continuous path in X. If is a geodesic segment connecting the endpoints of , then for every :
This result implies that a path of between and which avoids the ball of diameter has length greater than an exponential of the distance .
From now on we will add as convention that . For all a -slim triangle is also -slim, hence all -hyperbolic spaces are -hyperbolic spaces. That is why we can assume that all Gromov hyperbolic spaces are -hyperbolic with . It allows us to consider as a well defined term, we hence avoid the arising of separated cases in some oof the proofs. We also use this assumption to simplify constants appearing in this document. The next result is a similar control on the length of path as Proposition 4.5, but we consider that the path is avoiding a horosphere instead of avoiding a ball in .
Lemma 4.6.
Let and be a proper, geodesic, -hyperbolic, Busemann space. Let and and let , respectively , be a vertical geodesic containing , respectively . Let us consider and let us denote and , the respective points of and at the height . Assume that .
Then for all connected path such that , and we have:
| (14) |
For trees (when ) this Lemma still makes sense. Indeed, if tends to then the length of the path described in this Lemma tends to infinity, which is consistent with the fact that such a path does not exist in trees. The proof would use the fact that in Proposition 4.5 we have when since -hyperbolic spaces are real trees.
Proof.
One can follow the idea of the proof on Figure 8. We will consider to be parametrised by arclength. Let be the ball of radius centred on , and let be a point in this ball. Then:
Let us first assume that , then:
| (15) |
By Lemma 4.3 we have:
We now assume that , then:
Then Lemma 4.3 provides us with:
Since is a Busemann space, the function is convex. Furthermore is bounded on as is Gromov hyperbolic, hence is a non increasing function. Therefore both cases and give us that:
| (16) |
In other words, all points of belong to a vertical geodesic passing nearby . By the same reasoning we have :
| (17) |
Then by the triangle inequality:
| (18) |
Specifically which implies that . Then . By continuity of we deduce the existence of the two following times such that:
In order to have a lower bound on the length of we will need to split this path into three parts:
As is parametrised by arclength and we have that:
| (19) |
For similar reasons we also have:
| (20) |
We will now focus on proving a lower bound for the length of .
We want to construct a path joining to , that stays below and such that is contained in . Let and . We construct by gluing paths together:
Applying inequalities (16) and (17) used on and we get:
| (21) | ||||
| (22) |
In order to apply Proposition 4.5 to we need to check that there exists a point of the geodesic segment such that . Applying Lemma 4.3 to and since we get:
Thanks to the triangle inequality and inequalities (21) and (22):
Since by hypothesis , there exists a point of exactly at the height:
We can then apply Proposition 4.5 to get:
Since , last inequality implies that . Now we use this inequality to have a lower bound on the length of :
| (23) |
We claim that , hence:
| (24) |
which ends the proof by combining inequality (24) with inequalities (19) and (20).
Proof of the claim. Inequality (18) with and gives . We want to prove that . First, by Lemma 4.2 we have that is a -slim triangle. Then there exist three times , and such that and such that . Then:
| (25) |
We will show by contradiction that either or .
Assume that and . Then by the triangle inequality:
As is a Busemann space, the function is non increasing (convex and bounded function). Furthermore, hence:
which is impossible. Therefore or . We assume without loss of generality that , then:
which implies:
and gives us:
| (26) |
∎
Next lemma shows that we are able to control the relative distance of a couple of points travelling along two vertical geodesics. We recall that for all , .
Lemma 4.7 (Backwards control).
Let and be a proper, -hyperbolic, Busemann space. Let and be two vertical geodesics of . Then for all couple of times and for all :
Proof.
To simplify the computations, we use the following notations, and . The term is the difference of height between and since vertical geodesics are parametrised by their height. Then we have to prove that , . We can assume without loss of generality that . Lemma 4.3 applied with and with gives us . Furthermore, the relative distance is smaller than the distance, hence . Now, if we move the two points backward from and along and , we have for :
| (27) | ||||
| (28) |
Let us consider a geodesic between and . Since is a Busemann space, and thanks to Lemma 4.3 we have and . Then the second part of our inequality follows:
| (29) |
∎
The next lemma is a slight generalisation of Lemma 4.6. The difference being that we control the length of a path with its maximal height instead of the distance between the projection of its extremities on a horosphere.
Lemma 4.8.
Let and be a proper, -hyperbolic, Busemann space. Let such that . Let be a path connecting to with and where is a positive number such that . Then:
Proof.
This proof is illustrated in Figure 10. Since we have that . Applying Lemma 4.7 with , , , and we have:
Then we have:
Furthermore, Lemma 4.4 applied on and gives (notice that the only difference between the two sides of the following inequality is the height in the vertical geodesic ):
Then:
| (30) |
Let us denote . Thanks to inequality (30) the hypothesis of Lemma 4.6 holds with and . Applying this lemma on provides:
∎
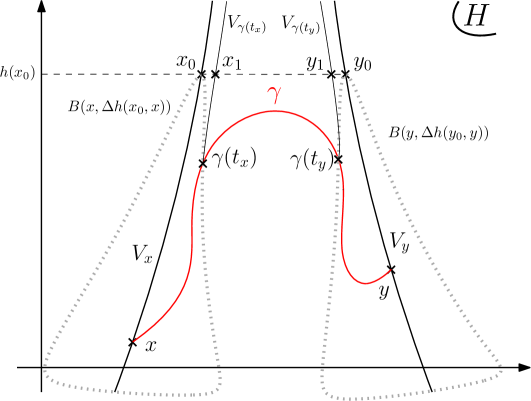
This previous lemma tells us that a path needs to reach a sufficient height for its length not to increase to much. We give now a generalisation of Lemma 4.8, where the path reaches a given low height before going to its end point. This proposition will be the central result for the understanding of the geodesic shapes in a horospherical product.
Proposition 4.9.
Let and be a proper, -hyperbolic, Busemann space. Let such that and let be a path connecting to such that . With the notation we have:
Proof.
This proof is illustrated in Figure 11. We first assume that , we postpone the other cases to the end of this proof. Let and be vertical geodesics respectively containing and . We call and the points of and at height . First, Lemma 4.4 provides . Then we consider a geodesic triangle between the three points , and . Lemma 4.3 tells us that . Since is included in the -neighbourhood of the two other sides of the geodesic triangle, one of the two following inequalities holds:
We first assume that , hence:
| (31) |
Let us denote the point of at height . By considering the -slim quadrilateral between the points we have that is in the - neighbourhood of . Furthermore by assumption, then . Since we have that . Moreover:
which allows us to use Lemma 4.7 on and with and . It gives:
which implies in particular:
| (32) |
Combining inequalities (31) and (32) we have . Lemma 4.4 used on and then gives:
| (33) |
Let us denote the part of linking to and the part of linking to . We have:
with . By assumption , hence which allows us to apply Lemma 4.8 on . It follows:
We use in the following inequalities that , we have:
which ends the proof for case 1).
Now assume that holds, which is . It implies , then:
with . Lemma 4.4 provides us with:
| (34) |
Since , we have which allows us to apply Lemma 4.8 on . It follows that:
Hence:
There remains to treat the case when , where . Let denote a point of such that . If comes before , we have . Otherwise comes before and we have . Since we always have:
Furthermore , then . Therefore:
which ends the proof for the remaining case. ∎
4.3 Length of geodesic segments in horospherical products
From now on, unless otherwise specified, and will always be two proper, geodesically complete, -hyperbolic, Busemann spaces with , and will always be an admissible norm. Let and be two points of , and let be a geodesic of connecting them. We first prove an upper bound on the length of by computing the length of a path linking to
Lemma 4.10.
Let and be points of the horospherical product . There exists a path connecting to such that:
Proof.
Without loss of generality, we assume . One can follow the idea of the proof on Figure 12. We consider and two vertical geodesics of containing and respectively. Similarly let and be two vertical geodesics of containing and respectively. We will use them to construct . Let be the point of the vertical geodesic at height and be the point of the vertical geodesic at the same height . Let be the point of the vertical geodesic at height and be the point of the vertical geodesic at the same height . Then is constructed as follows:
- is the part of linking to .
- is a geodesic linking to . Such a geodesic exists by Property 3.11.
- is the part of linking to .
- is a geodesic linking to . Such a geodesic exists by Property 3.11.
- is the part of linking to .
In fact and are close to each other. Indeed, the two points and are characterised by the two geodesics and . Then, because , Lemma 4.3 applied on and in gives us . Furthermore Property 3.11 provides us with , however we have that hence:
| (35) |
Lemma 4.3 applied on and provides similarly:
| (36) |
which gives us:
∎
We are aiming to use Proposition 4.9 on the two components and of to obtain lower bounds on their lengths. We hence need the following lemma to ensure us that when is a geodesic, the exponential term in the inequality of Proposition 4.9 will be small.
Lemma 4.11.
Let and let be a map defined by , . Then :
-
1.
-
2.
.
Proof.
For all time , we have that . The derivative of is , which is non negative and non positive otherwise. Then :
Since we have , then is non decreasing on . We show that :
Since we have and since we have that which provides we have . Furthermore , , hence we have which implies point of this lemma. ∎
The following lemma provides us with a lower bound matching Lemma 4.10, and a first control on the heights a geodesic segment must reach.
Lemma 4.12.
Let and be two points of such that . Let be a geodesic segment of linking to . Let , we have:
-
1.
-
2.
-
3.
.
Proof.
Let us denote and . Let be a point of at height , and be a point of at height . Then Proposition 4.9 used on gives us:
Since and , Proposition 4.9 used on provides similarly:
Hence by Property 3.4:
| (37) |
Furthermore, we know by Lemma 4.10 that . Since we have:
Let us denote . Therefore we have . By assumption hence . Furthermore, for , we have both and . Then we have . Lemma 4.11 provides which implies points and of our lemma. Lemma 4.11 also provides us with:
Last inequality is a lower bound of the term we want to remove in inequality (37). The first point of our lemma hence follows since . ∎
Corollary 4.13.
Let be an admissible norm and let . The length of a geodesic segment connecting to in is controlled as follows:
which gives us a control on the -path metric, for all points and in we have:
This result is central as it shows that the shape of geodesics does not depend on the -path metric chosen for the distance on the horospherical product.
Corollary 4.14.
Let . For all and in we have:
Proof.
The norm inequalities provide us with:
Hence we have . Then the norms are admissible norms with , which ends the proof. ∎
The next corollary tells us that changing this distance does not change the large scale geometry of .
Corollary 4.15.
Let and be two admissible norms. Then the metric spaces and are roughly isometric.
The control on the distances of Lemma 4.13 will help us understand the shape of geodesic segments and geodesic lines in a horospherical product.
5 Shapes of geodesics and visual boundary of
5.1 Shapes of geodesic segments
In this section we focus on the shape of geodesics. We recall that in all the following and are assumed to be two proper, geodesically complete, -hyperbolic, Busemann spaces with , and is assumed to be an admissible norm.
The next lemma gives a control on the maximal and minimal height of a geodesic segment in a horospherical product. It is similar to the traveling salesman problem, who needs to walk from to passing by and . This result follows from the inequalities on maximal and minimal heights of Lemma 4.12 combined with Lemma 4.10.
Lemma 5.1.
Let and be two points of such that . Let be an admissible norm and let be a geodesic of linking to . Let , we have:
-
1.
-
2.
.
Proof.
Let us consider a point of such that and a point of such that . Then comes before or comes before . In both cases, since and by Lemma 3.6 we have:
Furthermore Lemma 4.10 provides , hence:
which implies . In combination with the third point of Lemma 4.12 it proves the first point of our Lemma 5.1. The second point is proved similarly. ∎
Lemma 5.2.
Let be an admissible norm and let . Let and be two points of . Let be a geodesic of linking to . Then there exist two points of such that , with the following properties:
-
1.
If then:
-
(a)
and
-
(b)
-
(c)
-
(d)
.
-
(a)
-
2.
If then , , and hold by switching the roles of and and switching the roles of and .
-
3.
If at least one of the two previous conclusions is satisfied.
Proof.
Let us consider a point of such that and a point of such that . We first assume that comes before in oriented from to . Let us call the first point between and at height and the last point between and at height . Property of our Lemma is then satisfied. Let us denote the part of linking to , the part of linking to and the part of linking to . We have that is a point of and that is a point of . Inequalities and of Lemma 4.12 used on provide and similarly . Furthermore we have . Combining and Lemma 4.10 we have:
| (38) |
We have similarly that and that . It gives us , point of our lemma. Furthermore, using Lemma 5.1 on and provides:
Since we have:
| (39) |
which is the first inequality of . Using the first point of Lemma 4.12 on in combination with inequality (38) gives us:
Then the second inequality of point holds. We prove similarly the inequality of this lemma. This ends the proof when comes before . If comes before , the proof is still working by orienting from to hence switching the roles between and .
We will now prove that if then comes before on oriented from to . Let us assume that . We will proceed by contradiction, let us assume that comes before , using it implies:
However Lemma 4.12 applied on provides and . Then:
which contradict Lemma 4.10. Hence, if , the point comes before the point and by the first part of the proof, holds. Similarly, if then comes before and then holds. Otherwise when both cases could happened, then or hold. ∎
This previous lemma essentially means that if is sufficiently below , the geodesic first travels in a copy of in order to "lose" the relative distance between and , then it travels upward using a vertical geodesic from to until it can "lose" the relative distance between and by travelling in a copy of . It looks like three successive geodesics of hyperbolic spaces, glued together. The idea is that the geodesic follows a shape similar to the path we constructed in Lemma 4.10. The following theorem tells us that a geodesic segment is in the constant neighbourhood of three vertical geodesics. It is similar to the hyperbolic case, where a geodesic segment is in a constant neighbourhood of two vertical geodesics.
Theorem 5.3.
Let be an admissible norm. Let and be two points of and let be a geodesic segment of linking to . Let , there exist two vertical geodesics and such that:
-
1.
If then is in the -neighbourhood of
-
2.
If then is in the -neighbourhood of
-
3.
If then at least one of the conclusions of or holds.
Specifically and can be chosen such that is close to and is close to .
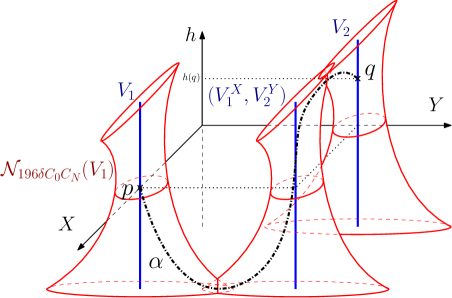
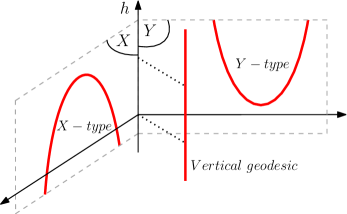
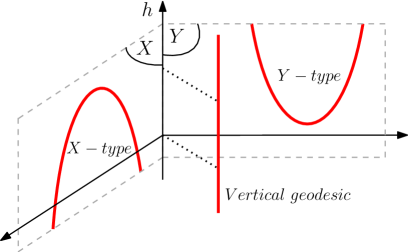
Figure 14 pictures the -neighbourhood of such vertical geodesics when . When , there are two possible shapes for a geodesic segment. In some cases, two points can be linked by two different geodesics, one of type and one of type .
Proof.
Let be a point of such that , and be a point of such that . Then by Lemma 5.1 we have:
| (40) |
We show similarly that:
| (41) |
In the first case we assume that . With notations as in Lemma 5.2, and by inequality (38), we have that , hence:
| (42) |
It follows from this inequality that:
Then:
Similarly . Let us consider the vertical geodesic of containing , and the vertical geodesic of containing . Let us denote the point of at the height . Since , Lemma 4.4 applied on and provides . We will then consider two paths of . The first one is , the part of linking to . The second one is a piece of vertical geodesic linking to . We show that these two paths have close length. Using Property 3.4 with inequalities (40) and (42) provides us with:
Furthermore and we know that , hence:
We already proved that their end points are also close to each other . Since , the property of hyperbolicity of gives us that is in the -neighbourhood of , a part of the vertical geodesic . We show similarly that is in the -neighbourhood of . Since is an admissible norm, Property 3.11 gives us that is in the -neighbourhood of . We show similarly that , the portion of linking to , is in the -neighbourhood of . We now focus on , the portion of linking to . Let us denote the path and the path . Then Lemma 5.1 provides us with:
| (43) |
However from Lemma 4.10 and since :
It follows from this inequality and the fact that is admissible that:
Thus:
In the same way we have . Let us denote the point of at the height . Since , Lemma 4.4 applied on and provides:
| (44) |
Hence we have proved that and have their end points close to each other. Let us now prove that these paths have close lengths. We have that , and from inequalities (40) and (41) we have:
As we obtain:
| (45) |
Then by similar arguments as for the path , inequalities (44) and (45) show that is in the neighbourhood of . Similarly we prove that is in the neighbourhood of . Since is an admissible norm, Property 3.11 gives us that is in the -neighbourhood of .
In the second case, we assume that . Then by switching the role of and , Lemma 5.2 gives us the result identically.
In the third case, we assume that . Then Lemma 5.2 tells us that one of the two previous situations prevail, which proves the result.
∎
5.2 Coarse monotonicity
We will see that the following definition is related to being close to a vertical geodesic.
Definition 5.4.
Let be a non negative number. A geodesic of is called -coarsely increasing if :
The geodesic is called -coarsely decreasing if :
The next lemma links the coarse monotonicity and the fact that a geodesic segment is close to vertical geodesics.
Lemma 5.5.
Let be an admissible norm and let . Let and be two points of and let be a geodesic segment of linking to . Let and be two points in such that and . We have:
-
1.
If , then is -coarsely decreasing on and -coarsely increasing on and -coarsely decreasing on .
-
2.
If , then is -coarsely increasing on and -coarsely decreasing on and -coarsely increasing on .
-
3.
If then the conclusions of or holds.
Proof.
Assume that . Then from inequality (42) in the proof of Theorem 5.3, . Furthermore Lemma 5.1 gives us that . Then:
| (46) |
We will proceed by contradiction, assume that is not -coarsely decreasing, then there exists , such that and . Hence:
which contradicts inequality (46). Then is -coarsely decreasing. We show in a similar way that is -coarsely increasing and that is -coarsely decreasing. This proves the first point of our lemma. The second point is proved by switching the roles of and . We now assume , as in the proof of Theorem 5.3 the inequality (42) or a corresponding inequality holds, which ends the proof. ∎
5.3 Shapes of geodesic rays and geodesic lines
In this section we are focusing on using the previous results to get informations on the shapes of geodesic rays and geodesic lines. We first link the coarse monotonicity of a geodesic ray to the fact that it is close to a vertical geodesic. Let and , a -quasigeodesic of the metric space is the image of a function verifying that :
| (47) |
Lemma 5.6.
Let be an admissible norm and let . Let be a geodesic ray of and let be a positive number such that is -coarsely monotone. Then and are -quasigeodesics.
Proof.
Let and be two times. Let us denote and . We apply Lemma 5.2 on the part of linking to denoted by . By -coarse monotonicity of we have that and . Hence using of Lemma 5.2:
Furthermore, and . Since is an admissible norm we have:
Hence:
By definition we have , and . Then is a -quasigeodesic ray. We prove similarly that is a -quasigeodesic ray. ∎
We will now make use of the rigidity property of quasi-geodesics in Gromov hyperbolic spaces, presented in Theorem 3.1 p.41 of [5].
Theorem 5.7 ([5]).
Let be a -hyperbolic geodesic space. If is a -quasi geodesic, then there exists a constant depending only on and such that the image of is in the -neighbourhood of a geodesic in .
Lemma 5.8.
Let be an admissible norm and let and be two real numbers. Let be a geodesic ray of . Let be a positive number such that is -coarsely monotone. Then there exists a constant depending only on , and such that is in the -neighbourhood of a vertical geodesic ray and such that .
Proof.
We assume without loss of generality that . Let , by Lemma 5.6, is a -quasi geodesic ray. Then Theorem 5.7 says there exists depending only on and such that is in the -neighbourhood of a geodesic . Since depends only on and , depends only on , and . Then gives us which implies that is a vertical geodesic of . We will now build the vertical geodesic we want in . We have and by Lemma 5.6:
Since is Busemann, there exists a vertical geodesic ray starting at . Since is parametrised by its height, is also a -quasi geodesic, hence there exists and depending only on , and such that is in the -neighbourhood of . Since , is a vertical geodesic of .
Furthermore, by Property 3.11, , hence there exists depending only on , and such that is in the -neighbourhood (for ) of , a vertical geodesic of .
Since , is in the -neighbourhood of which is a vertical geodesic ray.
We will now show that the starting points of and are close to each other. Let us denote a time such that , then , hence . Then by the triangle inequality:
Let us denote and . Hence is in the -neighbourhood of a vertical geodesic ray , we have and depends only on and . ∎
Lemma 5.9.
Let be an admissible norm and let be a geodesic ray of . Then changes its -coarse monotonicity at most once.
Proof.
Let be a geodesic ray. Thanks to Lemma 5.5 changes at most twice of -coarse monotonicity. Indeed, assume it changes three times, applying Lemma 5.5 on the geodesic segment which includes these three times provides a contradiction. We will show in the following that it actually only changes once.
Assume changes twice of -coarse monotonicity. Then must be first -coarsely increasing or -coarsely decreasing. We assume without loss of generality that is first -coarsely decreasing. Then there exist such that is -coarsely decreasing on then -coarsely increasing on then -coarsely decreasing on .
Hence Lemma 5.8 applied on implies that there exists depending only on (since the constant of coarse monotonicity depends only on ) and a vertical geodesic ray such that is in the -neighbourhood of .
Since , we have that , hence there exists such that . Then Lemma 5.5 tells us that is first -coarsely increasing, which contradicts what we assumed.
∎
We have classified the possible shapes of geodesic rays. Since geodesic lines are constructed from two geodesic rays glued together, we will be able to classify their shapes too.
Definition 5.10.
Let be an admissible norm and let be a path of . Let .
-
1.
is called -type at scale if and only if:
-
(a)
is in a -neighbourhood of a geodesic of
-
(b)
is in a -neighbourhood of a vertical geodesic of .
-
(a)
-
2.
is called -type at scale if and only if:
-
(a)
is in a -neighbourhood of a geodesic of
-
(b)
is in a -neighbourhood of a vertical geodesic of .
-
(a)
The -type paths follow geodesics of , meaning that they are close to a geodesic in a copy of inside . The -type paths follow geodesics of .
Remark 5.11.
In a horospherical product, being close to a vertical geodesic is equivalent to be both -type and -type.
Theorem 5.12.
Let be an admissible norm. There exists depending only on and such that for any geodesic of at least one of the two following statements holds.
-
1.
is a -type geodesic at scale of
-
2.
is a -type geodesic at scale of
Proof.
It follows from Lemma 5.9 that changes its coarse monotonicity at most once. Otherwise there would exist a geodesic ray included in that changes at least two times of coarse monotonicity. We cut in two coarsely monotone geodesic rays and such that up to a parametrisation and .
By Lemma 5.8 there exists and depending only on such that is in the -neighbourhood of a vertical geodesic ray and such that is in the -neighbourhood of a vertical geodesic ray . This lemma also gives us and .
Assume that , then they are both vertical rays hence are close to a common vertical geodesic ray. Furthermore in that case. Let be the non continuous path of defined as follows.
We now prove that is a quasigeodesic of . Let and be two real numbers. Since and are geodesics, if and are both non positive or both positive. Thereby we can assume without loss of generality that is non positive and that is positive. We also assume without loss of generality that . The quasi-isometric upper bound is given by:
It remains to prove the lower bound of the quasi-geodesic definition on .
| (48) |
The Busemann assumption on provides us with:
Since is a geodesic and by using the triangle inequality on (48) we have:
Assume that , then:
Hence is a quasi-geodesic, which was the remaining case. Since and depend only on and , there exists a constant depending only on and such that is in the -neighbourhood of a geodesic of . The geodesic is a -type geodesic in this case.
Assume , we prove similarly that is a -type geodesic.
∎
If a geodesic is both -type at scale and -type at scale , then it is in a -neighbourhood of a vertical geodesic of .
5.4 Visual boundary of
We will now look at the visual boundary of our horospherical products. This notion is described for the Sol geometry in the work of Troyanov [27] through the objects called geodesic horizons. We extend one of the definitions presented in page 4 of [27] for horospherical products.
Definition 5.13.
Two geodesics of a metric space are called asymptotically equivalent if they are at finite Hausdorff distance from each other.
Definition 5.14.
Let be a metric space and let be a base point of . The visual boundary of is the set of asymptotic equivalence classes of geodesic rays such that , it is denoted by .
We will use a result of [23] to describe the visual boundary of horospherical products.
Property 5.15 (Property p.234 of [23]).
Let be a proper Busemann space, let be a point in and let be a geodesic ray. Then, there exists a unique geodesic ray starting at that is asymptotic to .
Theorem 5.16.
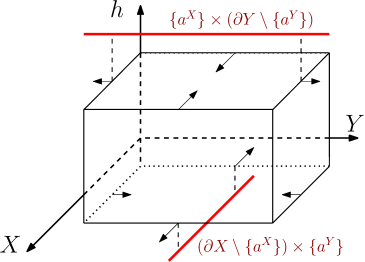
Let be an admissible norm. We fix base points and directions , . Let be the horospherical product with respect to and . Then the visual boundary of with respect to a base point is given by:
The fact that is not allowed as a direction in is understandable since both heights in and would tend to , which is impossible by the definition of .
Proof.
Let be a geodesic ray. Lemma 5.9 implies that there exists such that is coarsely monotone on . Then Lemma 5.8 tells us that is at finite Hausdorff distance from a vertical geodesic ray , hence is also at finite Hausdorff distance from .
Since is Busemann and proper, Property 5.15 ensure us there exists a vertical geodesic ray such that and are at finite Hausdorff distance with . Similarly, there exists a vertical geodesic ray of with such that and are at finite Hausdorff distance.
Furthermore, there is at least one vertical geodesic ray in every asymptotic equivalence class of geodesic rays, hence is the set of asymptotic equivalence classes of vertical geodesic rays starting at . Therefore, an asymptotic equivalence class can be identified by the couple of directions of a vertical geodesic ray. Then can be identified to:
the union between downward directions and upward directions, which proves the theorem. ∎
Example 5.17.
In the case of Sol, and are hyperbolic planes , hence their boundaries are and . Then can be identified to the following set:
| (49) |
It can be seen as two lines at infinity, one upward and the other one downward .
It is similar to Proposition 6.4 of [27].
References
- [1] L. Bartholdi, M. Neuhauser, W. Woess, Horocyclic products of trees. Journal European Mathematical Society, Volume 10 (2008) 771-816.
- [2] A. Bendikov, L. Saloff-Coste, M. Salvatori, W. Woess, Brownian motion on treebolic space: escape to infinity. Revista Matemática Iberoamericana. European Mathematical Society Publishing House, Volume 31.3 (2015), 935-976.
- [3] M.R. Bridson, A. Haefliger, Metric Spaces of Non-Positive Curvature. Grundlehren der Mathematischen Wissenschaften [Fundamental Principles of Mathematical Sciences]. Springer-Verlag, Berlin, Volume 319 (1999).
- [4] S. Brofferio, M. Salvatori, W. Woess, Brownian Motion and Harmonic Functions on Sol. International Mathematics Research Notices, Volume 22 (2011) 5182–5218.
- [5] M. Coornaert, T. Delzant, A. Papadopoulos, Géométrie et théorie des groupes: Les groupes hyperboliques de Gromov. Lecture Notes in Mathematics 1441 (1990).
- [6] M.G. Cowling, V. Kivioja, E. Le Donne, S. Nicolussi Golo, A.Ottazi, From Homogeneous Metric Spaces to Lie Groups. arXiv:1705.09648 (2021).
- [7] T. Dymarz, Large scale geometry of certain solvable groups. Geometric and Functional Analysis, volume 19, 6 (2009), 1650-1687.
- [8] A. Eskin, D. Fisher, Quasi-isometric rigidity of solvable groups. Proceedings of the International Congress of Mathematicians, Hyderabad, India, (2010).
- [9] A. Eskin, D. Fisher, K. Whyte, Quasi-isometries and rigidity of solvable groups. Pure and Applied Mathematics Quaterly Volume 3 Number 4 (2007), 927-947.
- [10] A. Eskin, D. Fisher, K. Whyte, Coarse differentiation of quasi-isométries I: Spaces not quasi-isometric to Cayley graphs. Annals of Mathematics Volume 176 (2012), 221-260.
- [11] A. Eskin, D. Fisher, K. Whyte, Coarse differentiation of quasi-isométries II: rigidity for lattices in Sol and lamplighter groups. Annals of Mathematics Volume 177 (2013), 869-910.
- [12] B. Farb, L. Mosher, A rigidity theorem for the solvable Baumslag-Solitar groups. Invent. math. 131 (1998),419-451.
- [13] B. Farb, L. Mosher, Quasi-isometric rigidity for the solvable Baumslag-Solitar groups II. Invent. math. 137 (1999),613-649.
- [14] T. Ferragut, Geometric rigidity of quasi-isometries in horospherical products.. arXiv: 2211.04093 (2022)
- [15] T. Foertsch, A. Lytchak, V. Schroeder, Nonpositive Curvature and the Ptolemy Inequality.. International Mathematics Research Notices Volume 2007 (2007).
- [16] E. Ghys, P. De La Harpe, Sur les Groupes Hyperboliques d’après Mikhael Gromov. Progress in Mathematics Volume 83 (1990).
- [17] S. Gouëzel, V. Shchur, A corrected quantitative version of the Morse lemma Journal of Functional Analysis, Volume 277 (2019) 1258-1268.
- [18] M. Gromov, Asymptotic invariants of infinite groups LMS Lecture Notes, vol. 182, Cambridge Univ. Press, (1993).
- [19] J. Heinonen, Lectures on analysis on metric spaces. Universitext. Springer-Verlag, New York, (2001).
- [20] E. Heintze, On homogeneous manifolds of negative curvature. Mathematische Annalen. Vol.211; Iss. 1 (1974).
- [21] M. Kapovich, Lectures on quasi-isometric rigidity. Geometric Group Theory . vol.21. (2014), 127-172.
- [22] E. Le Donne, G. Pallier, X. Xie, Rough similarity of left-invariant Riemannian metrics on some Lie groups. arXiv:2208.06510 (2022).
- [23] A. Papadopoulos, Metric spaces, convexity and nonpositive curvature. IRMA Lectures in Mathematics and Theoretical Physics 6 (2004).
- [24] I. Peng, Coarse differentiation and quasi-isometries of a class of solvable Lie groups I. Geom. Topol. 15, No. 4, (2011), 1883-1925.
- [25] I. Peng, Coarse differentiation and quasi-isometries of a class of solvable Lie groups II. Geom. Topol. 15, (2011), 1927–1981.
- [26] P.M. Soardi, W. Woess, Amenability, unimodularity, and the spectral radius of random walks on infinite graphs. Math. Z. 205 (1990), 471–486.
- [27] M. Troyanov, L’horizon de SOL. EPFL, Exposition. Math. Volume 16 (1998), 441-479.
- [28] W. Woess, Lamplighters, Diestel-Leader Graphs, Random Walks, and Harmonic Functions. Institut für Mathematik C, Technische Universität Graz Steyrergasse 30, Combinatorics, Probability & Computing 14 (2005) 415-433.
- [29] W. Woess, What is a horocyclic product, and how is it related to lamplighters? Internationale Mathematische Nachrichten, Volume 224 (2013) 1-27.
- [30] X. Xie, Large scale geometry of negatively curved . Geom. Topol. 18, No. 2 (2014), 831-872.