Genus one singularities in mean curvature flow
Abstract.
We show that for certain one-parameter families of initial conditions in , when we run mean curvature flow, a genus one singularity must appear in one of the flows. Moreover, such a singularity is robust under perturbation of the family of initial conditions. This contrasts sharply with the case of just a single flow. As an application, we construct an embedded, genus one self-shrinker with entropy lower than a shrinking doughnut.
1. Introduction
Mean curvature flow (MCF) is the most rapid process to decrease the area of a surface. With an initial motivation from applied science, this geometric evolution equation has gained much interest recently due to its potential for studying the geometry and topology of surfaces embedded in three-manifolds. As a nonlinear geometric heat flow, MCF may have singularities, which may lead to changes in the geometry and topology of the surfaces.
The blow-up method, pioneered by Huisken [Hui90], Ilmanen [Ilm95], and White [Whi97], shows that the singularities are modeled by a special class of surfaces called self-shrinkers. They satisfy the equation . Determining the possible singularity models that can arise in an arbitrary MCF is a challenging problem. With the convexity assumption, Huisken [Hui84] proved that the singularities must be modeled by spheres. With the mean convexity assumption, White [Whi97, Whi00, Whi03] proved that the singularities must be modeled by spheres and cylinders. However, in the absence of curvature assumptions, the question of which type of singularities must arise in MCF remains widely open. In this paper, we find a condition that guarantees the appearance of a singularity modeled by a genus one self-shrinker. To the best of our knowledge, this is the first resultthat produces a singularity, that appears in a non-self-shrinking flow and is modeled by a self-shrinker of non-zero genus.

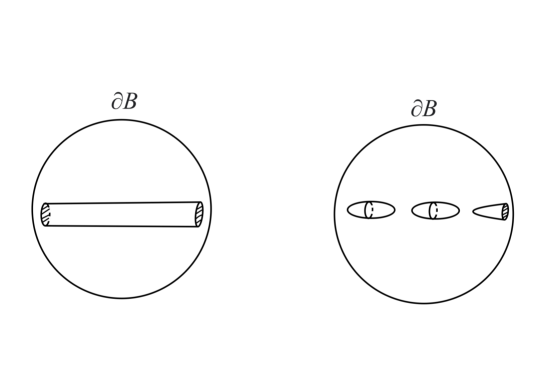
Let us first explain the heuristics, which involves an interpolation argument. In Figure 1, we have a one-parameter family of tori in the top row. Suppose that the initial torus has a thin “inward neck,” which will eventually pinch under the MCF. On the other hand, the final torus has a thin “outward neck” in the middle, which will also pinch under MCF. Then, there should exist a critical value such that for the torus , both the inward and outward necks pinch under MCF, giving rise to a genus one singularity.
The following is our main theorem. We will provide a precise definition of “inward (or outward) torus neck will pinch” later in Definition 1.8.
Theorem 1.1.
Let be a smooth family of tori in such that for the MCF starting from (resp. ), the inward (resp. outward) torus neck will pinch. Then there exists such that the MCF starting from would develop a singularity that is not multiplicity one cylindrical or multiplicity one spherical.
Note that, in precise terms, by MCF we actually refer the level set flow (see §2). In fact, before the flow encounter a genus one singularity, it is possible that it passed through some cylindrical singularities or spherical singularities. We also remark that Brendle [Bre16] proved that the only genus self-shrinkers are the spheres and the cylinders. In contrast, there are many higher genus self-shrinkers, as constructed in [Ang92, Ngu14, KKM18, Møl11, SWZ20], among others.
Now, immediately, we can exclude the possibility of multiplicity if the entropy of each torus is less than . The entropy of a surface was defined by Colding-Minicozzi [CM12]:
Corollary 1.2.
In the setting of Theorem 1.1, if each initial torus has entropy less than , then at the singularity concerned, every tangent flow is given by a multiplicity one, embedded, genus one self-shrinker.
Recall that the tangent flow represents a specific blow-up limit of a MCF at a singularity, as discussed in §2.2. By employing Huisken’s monotonicity formula [Hui90], Ilmanen [Ilm95], and White [Whi97] proved that the tangent flow must be a self-shrinker with multiplicity.
Let us now explicitly provide a family of tori that satisfies the assumption of Corollary 1.2. Consider the rotationally symmetric, compact, genus one self-shrinker in constructed by Drugan-Nguyen [DN18], which we will denote by . It is worth noting that both and the Angenent torus [Ang92] are referred to as shrinking doughnuts, and they may be the same. It was shown that has entropy strictly less than [DN18], while Berchenko-Kogan [BK21] provided numerical evidence that the Angenent torus has an entropy of approximately .
Theorem 1.3.
Let be a smooth family of tori in that are sufficiently close in to the shrinking doughnut , with strictly inside while strictly outside. Then there exists such that the MCF starting from would develop a singularity at which every tangent flow is given by a multiplicity one, embedded, genus one self-shrinker.
The idea of Theorem 1.3 can be traced back to the work of Lin and the second author in [LS22]. In earlier work, Colding-Ilmanen-Minicozzi-White [CIMIW13] observed that one can perturb a closed embedded self-shrinker in such that the MCF has only neck and spherical singularities. Lin and the second author observed a bifurcation phenomenon: Inward (resp. outward) perturbations cause the MCF pinch from inside (resp. outside). After we completed this manuscript, we were notified by the anonymous referee that the idea of Theorem 1.1 has been discussed and explained orally by Edelen and White.
It is also interesting to compare our results with the recent developments in generic MCF [CM12, CCMS20, CCMS21, SX21a, SX21b, CCS23, Sun23]: One can perturb a single MCF to avoid a singularity that is not spherical or cylindrical. In contrast, our results imply that for a certain one-parameter family of MCFs, a singularity that is modeled by a genus one shrinker remains robust under perturbations.
It is natural to ask whether Theorem 1.1 extends to surfaces with genus two or above. Actually, it would not: See a counterexample in Remark 5.2. Nevertheless, a similar theory might be established for a multi-parameter family of higher genus surfaces (see Question 1.10).
Let us now present several applications of the above theorems.
Theorem 1.4.
An embedded, genus one self-shrinker in of the least entropy either is non-compact or has index .
Note that the existence of an entropy minimizer among all embedded, genus self-shrinkers in , with a fixed , was proved by Sun-Wang [SW20].
Theorem 1.5.
There exists an ancient MCF through cylindrical and spherical singularities in such that:
-
•
As , smoothly.
-
•
As , hits a singularity at which every tangent flow is given by a multiplicity one, embedded, genus one self-shrinker of lower entropy than .
In fact, Theorem 1.5 remains valid even with replaced by any other closed, embedded, rotationally symmetric, genus one shrinker (if they indeed exist), and the same proof will hold.
Recalling that the rotationally symmetric shrinker must have index of at least , as shown by Liu [Liu16], we can deduce the following corollary from Theorem 1.4 and 1.5.
Corollary 1.6.
There exists an embedded, genus one self-shrinker in with entropy lower than .
Finally, the three self-shrinkers in with the lowest entropy are the plane, the sphere, and the cylinder ([CIMIW13, BW17]). Notably, all three of them are rotationally symmetric. Kleene-Møller [KMl14] proved that all other rotationally symmetric smooth embedded self-shrinkers are closed with genus .
Now, the space of smooth embedded self-shrinkers in with entropy less than some constant is known to be compact in the topology (see [Lee21]). Together with the rigidity of the cylinder as a self-shrinker by [CIM15], there exists a smooth embedded self-shrinker that minimizes entropy among all smooth embedded self-shrinkers with entropy larger than that of the cylinder.
Corollary 1.7.
A smooth embedded self-shrinker in with the fourth lowest entropy is not rotationally symmetric.
1.1. Main ideas: Change in homology under MCF
The major challenge of this paper is to introduce some new concepts to rigorously state and prove the interpolation argument we outlined on page 1 and Figure 1. Particularly, it is crucial to describe the topological change of the surfaces more precisely. Let be a MCF in , where the initial condition is a closed, smooth, embedded surface. Since we would allow to have singularities and thus change its topology, is, more precisely, a level set flow. In this paper, we often use the phrases MCF and level set flow interchangeably.
It is known that the topology of simplifies over time. In [Whi95], White focused on describing the complement (instead of itself), and how it changes over time. For example, he showed is non-increasing in , where denotes the first homology group in -coefficients. Therefore, heuristically, the topology can only be destroyed but not created during the evolution of the surface.
In this paper, we will further describe this phenomenon by keeping track of which elements of the initial homology group are destroyed, and how they are destroyed. To illustrate, let us use the flow depicted in Figure 2 as an example.

1.1.1. Heuristic observation
Let us begin by providing some heuristic observations regarding Figure 2. We will elaborate on them more precisely shortly. We fix four elements of at time , as shown in the figure. Note that and are in the bounded region inside the genus two surface , whereas and are in the region outside .
-
(1)
At time , is “broken” by the cylindrical singularity of the flow. As a result, for later time , no longer exists. Apparently, it “terminates” at time .
-
(2)
On the other hand, , , and all can survive through time . For example, for , we can clearly have a continuous family of loops, , where and each is a loop outside the surface . In this sense, will survive for all time, although it becomes trivial after time .
-
(3)
As for , although it survives through , it will terminate at , when it is broken by the cylindrical singularity .
Let us now provide precise descriptions of these observations.
1.1.2. Three new concepts
To our knowledge, these concepts are new, but they seem natural in the context of geometric flows. We believe these concepts may hold independent interest as well.
To set up, for any two times , let us consider the complement of the spacetime track of the flow within the time interval :
In order to discuss the “termination” of an element under the flow, we first need to relate elements of and elements of at some later time .
Homology descent. (Definition 3.1.) Given two elements and with , we say that descends from , and denote
if the following holds: For every representative and , if we view them as subsets
then they bound some singular 2-chain , i.e. (See Figure 3.)

As we will prove, the above notion satisfies some desirable properties. For example, given a , the element described above, if exists, turns out to be unique. Consequently, we denote this unique element as .
This enables us to further define:
Homology termination. (Definition 3.8.) Let . If
is finite, then we say that terminates at time .
For instance, in Figure 2, we observe that terminates at time , and terminates at time . However, never terminates, despite the fact that becomes trivial for . Similarly, also never terminates, even though becomes trivial for . Note that would not terminate at time : For any , any loop in would bound a disc in , so it follows easily that for any loop and loop , would bound some 2-dimensional chain in the complement of the spacetime track.
Finally, we can describe what “ breaks at a cylindrical singularity ” means.
Homology breakage. (Definition 3.12.) Let , , and . Suppose the following holds:
- •
For each , the element (such that ) exists.
- •
For every neighborhood of , for each sufficiently close to , every element of intersects .
Then we say that breaks at . (See Figure 4.)

For example, in Figure 2, breaks at , while breaks at .
As we will see, these three new concepts are quite useful and satisfy several nice properties. Here are a few examples:
- •
-
•
If the initial condition is a closed surface of non-zero genus, then some initial homology class must terminate at finite time (Remark 4.10).
-
•
Suppose is a MCF with only spherical and cylindrical singularities. If a homology class terminates at some time , then it must break at for some cylindrical singularity (Theorem 4.5).
These properties are all crucial in proving the main theorems.
Finally, let us provide a precise definition of “inward (or outward) torus neck will pinch” in Theorem 1.1.
Definition 1.8.
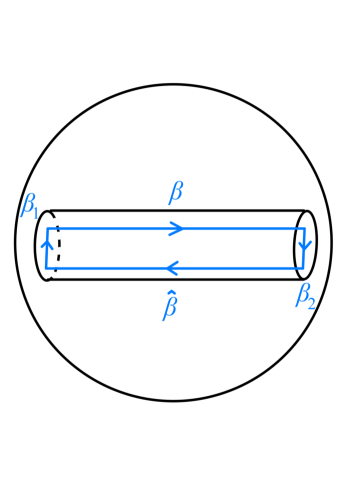
Given a torus in , let (resp. ) be a generator of the first homology group of the interior (resp. exterior) region of , which is isomorphic to (see Figure 5). We say that the inward (resp. outward) torus neck of will pinch if (resp. ) will terminate under MCF.

Clearly, (and ) is unique up to a sign, and the above notion is independent of which sign we choose.
1.2. Structure of cylindrical singularities
Once we establish the topological concepts to keep track of the homology classes under the MCF, another challenge arises: We need to understand what happens to these homology classes as the MCF encounters the cylindrical singularities.
Intuitively, a cylindrical singularity is just like a neck, and as we approach the singular time, the neck pinches as in Figure 1. However, the actual situation can be much more complicated. For example, consider the MCF of the boundary of a tubular neighborhood of a rotationally symmetric in . It will shrink to a singular set that is a rotationally symmetric , where each singular point is cylindrical, but it does not look like a neck pinching.
First, one has the partial regularity of the singular set of cylindrical singularities, studied by White [Whi97] and Colding-Minicozzi [CM15, CM16]. This allows us to control the singular set. We can establish the compactness of the singular set of cylindrical singularities that are inward (or outward), and know that they only appear for a zero-measured set of time.
Another important theory is the mean convex neighborhood theory of cylindrical singularities by Choi-Haslhofer-Hershkovits [CHH22], and a generalized version by Choi-Haslhofer-Hershkovits-White [CHHW22]. In these works, they classified the possible limit flows at a cylindrical singularity. As a consequence, they derived a canonical neighborhood theorem at a cylindrical singularity, which describes the local behavior of the MCF.
1.3. Outline of proofs
1.3.1. Theorem 1.1
We will prove by contradiction. For each , let be the MCF (more precisely, a level set flow) with as its initial condition. Let (resp. be a generator of the first homology group of the inside (resp. outside) region of each torus (recall Definition 1.8). Assuming that Theorem 1.1 were false, would be a MCF through cylindrical and spherical singularities for each . This flow is unique and well-defined by Choi-Haslhofer-Hershkovits [CHH22]. Next, we show that for each , either or will terminate, but not both. This claim relies on the fact, mentioned above, that if a homology class will terminate, it must break at a neck singularity. This crucial fact is established based on the mean convex neighborhood theorem and the canonical neighborhood theorem by Choi-Haslhofer-Hershkovits-White [CHH22, CHHW22].
Thus, we can partition into a disjoint union , where is the set of for which will terminate, and is the set of for which will terminate. Furthermore, we will show that and are both closed sets. Recall that we are given and . Since is a connected interval, this leads to a contradiction.
1.3.2. Theorem 1.3
We can apply Theorem 1.1 to prove Theorem 1.3, provided that we can show the inward torus neck will pinch (i.e., will terminate) for the starting flow (), and the outward torus neck will pinch (i.e., will terminate) for the ending flow (). To prove, for instance, that will terminate for the starting flow, we recall that lies strictly inside the shrinker . Then we will run MCF to these two surfaces and use the avoidance principle, which states that the distance between the two surfaces will increase, to conclude that must terminate.
1.3.3. Theorem 1.4
Let be an embedded, genus one shrinker with the least entropy. Suppose by contradiction that it is compact with index at least . Disregarding the four (orthogonal) deformations induced by translation and scaling, there are still two other deformations that decrease the entropy, one of which is the one-sided deformation given by the first eigenfunction of the Jacobi operator. Thus, we can construct a one-parameter family of tori with entropy less than , such that the starting torus is inside , and the ending torus is outside . Then, as in the proof of Theorem 1.3, we apply Theorem 1.1 to obtain another genus one shrinker with less entropy than . This contradicts the definition of .
1.3.4. Theorem 1.5
According to Liu [Liu16], the shrinking doughnut has an index of at least . Consequently, based on the result of Choi-Mantoulidis [CM22], there exists a one-parameter family of ancient rescaled MCF originating from that decreases the entropy. As before, we can apply Theorem 1.1 to immediately obtain the desired genus one, self-shrinking tangent flow with lower entropy.
1.4. Open questions
We propose several open problems. The first one is motivated by generic MCF and min-max theory.
Conjecture 1.9.
There exists an embedded, genus one, index self-shrinker in that is the “second most generic” one.
We say a self-shrinker is the “second most generic”, after the generic ones (the cylinder and the sphere), in the following sense: Suppose we have a one-parameter family of embedded surfaces in . Then, we can perturb this family such that when we run MCF for every , every singularity is either cylindrical, spherical, or modeled by .
Note that Theorem 1.4 and its proof can be seen as evidence of a very “local” version of this conjecture: They say that any closed, embedded, genus one self-shrinker with an index of at least is not the second most generic.
Now, we note that Theorem 1.1 does not hold for initial conditions with genus greater than one, see Remark 5.2.
Question 1.10.
Can Theorem 1.1 be generalized to the higher genus case, possibly by considering higher parameter families of initial conditions?
Finally, notice that many concepts that we introduce in this paper heavily rely on the extrinsic structure of mean curvature flow.
Question 1.11.
Can the concepts of homology descent, homology termination, and homology breakage be adapted to the setting of Ricci flow?
1.5. Organizations.
In §2, we will introduce the preliminary materials, including a refined canonical neighborhood theorem. In §3, we will define the concepts of homology descent, homology termination, and homology breakage, and prove some relevant basic propositions. In §4, we focus on the case of MCF through cylindrical and spherical singularities, with torus as the initial condition. In §5, we prove the main theorems.
Acknowledgement
We would like to thank Professor André Neves for all the fruitful discussions and his constant support. We are grateful to Zhihan Wang for the valuable conversations. And the first author would also like to thank Chi Cheuk Tsang for the helpful discussions. We are also grateful to anonymous referees for many helpful comments and suggestions, especially the work by Edelen and White.
2. Preliminaries
In §2 we will set up the language and provide the necessary background to define MCF through cylindrical and spherical singularities.
The classical mean curvature flow is a family of hypersurfaces in satisfying the equation
| (1) |
where is the position vector and is the mean curvature vector. When the hypersurface is not , we can not define the mean curvature flow using this PDE, and we need to use some weak notions to define the flow.
2.1. Weak solutions of MCF
Throughout this paper, we will focus on two different types of weak solutions of MCF. One is a set-theoretic weak solution defined by the level set flow, and another one is a geometric measure theoretic weak solution called Brakke flow. Readers interested in detailed discussions of level set flows can refer to [ES91, Ilm92], while those interested in Brakke flow can refer to [Bra78, Ilm94].
The level set flow equation is a degenerate parabolic equation
| (2) |
Suppose is a closed hypersurface in , then if solves (2) with , then can be viewed as a weak solution to MCF. In particular, when is smooth, this weak solution coincides with the classical solution of MCF.
The level set flow was introduced by Osher-Sethian in [OS88]. Chen-Giga-Goto [CGG91] and Evans-Spruck [ES91] introduced the viscosity solutions to equation (2), and these solutions are Lipschitz. Throughout this paper, when we refer to a level set function or a solution to the level set flow equation, we mean a viscosity solution to equation (2).
The set-theoretic solution of a MCF will be called the level set flow or biggest flow. These notions are used by Ilmanen [Ilm92] and White [Whi95, Whi00, Whi03]. The term “biggest flow” is used to avoid ambiguity when dealing with weak solutions for noncompact flows. Such a weak solution may have a nonempty interior. In this case, we say the level set flow fattens.
Brakke flow is defined using geometric measure theory. Let be a complete manifold without boundary. The Brakke flow is a family of Radon measures , such that for any test function with ,
where is the mean curvature vector of whenever is rectifiable and has -mean curvature in the varifold sense. Otherwise, the right-hand side is defined to be .
In general, the Brakke flow starting from a given initial data is not unique. We will be interested in unit regular cyclic integral Brakke flows. For detailed discussions on these notions, we refer the readers to [Whi09]. The existence of such a flow starting from a smooth surface is guaranteed by Ilmanen’s elliptic regularization, see [Ilm94]. These flows have a well-established compactness theory.
2.2. Setting and notations
Let be a closed smooth -dimensional hypersurface in that bounds a compact set . Let . Now, denote by
respectively the level set flow (i.e. the biggest flow) with initial condition , and . Then we define their spacetime tracks
We then define the inner flow of ,
and the outer flow of ,
Lemma 2.1.
Let be a level set function of , with on . Then
Proof.
For the first claim, we let by if and otherwise. By the relabelling lemma ([Ilm92, Lemma 3.2]), also satisfies the level set equation. Noting precisely on , which is compact, we know by the uniqueness of level set flow that is a level set function of . Hence,
The second claim is similar. We let by if and otherwise. Then satisfies the level set equation by the relabelling lemma, and , which is non-compact. Nevertheless, by Ilmanen [Ilm92], because any level sets other than are compact, is the biggest flow, which is unique. Then the second claim will follow. ∎
Finally, we denote
In fact, we will further define the spacetime track
and we can similarly define and . The reason we care about these sets is that their topological changes are described by White [Whi95], which will be crucial for us later. We remark that, when we need to specify the flow , we will add a superscript M to the symbols: e.g. we will write in place of .
Let be a singularity of , and . Then any subsequential limit, in the sense of Brakke flow (see [Ilm94, Section 7]), of the rescaled flows
is called a tangent flow at . The tangent flow is unique if it is the shrinking cylinder or has only conical ends, by Colding-Minicozzi [CM15] and Chodosh-Choi-Schulze [CS21] respectively. Moreover, the convergence is in by Brakke’s regularity theorem (see [Whi05]).
Now, following [CHHW22], we call an inward neck singularity of if, as , the rescaled flows
converge locally smoothly with multiplicity one to the solid shrinking cylinder
up to rotation and translation. Similarly, we can define an outward neck singularity. If, instead, those rescaled flows converge with multiplicity one to the solid shrinking ball
up to translation, then we call an inward spherical singularity. We can again similarly define an outward spherical singularity.
2.3. MCF through cylindrical and spherical singularities
If every singularity of is a neck or a spherical singularity, then we call a MCF through cylindrical and spherical singularities. In this case, building on Hershkovits-White [HW20], Choi-Haslhofer-Hershkovits-White showed , and are all the same [CHHW22, Theorem 1.19], i.e. fattening does not occur.
Neck singularities are well-understood after the work of many researchers [HS99a, HS99b, Whi00, Whi03, SW09, Wan11, And12, Bre15, CM15, HK17, ADS19, ADS20, CHH22, CHHW22], among others. In Theorem 2.4, we will state the canonical neighborhood theorem of Choi-Haslhofer-Hershkovits-White [CHHW22]. Using that, we obtain a more detailed topological description of neck singularities in Theorem 2.5.
Definition 2.2.
Let be a regular point in a level-set flow . Let . Suppose there exists an ancient MCF that is, up to spacetime translation and parabolic rescaling, one of the following:
-
•
the shrinking sphere,
-
•
the shrinking cylinder with axis ,
-
•
the translating bowl with axis ,
-
•
the ancient oval with axis ,
such that: For each and inside ,
are -close in . Then, we call
an -canonical neighborhood of with axis .
We will also have a weaker definition, for situations when we focus on a time slice:
Definition 2.3.
Let be a regular point in a subset . Let . Suppose there exists a hypersurface that is, up to translation and rescaling, a time slice of one of the following:
-
•
the shrinking sphere,
-
•
the shrinking cylinder with axis ,
-
•
the translating bowl with axis ,
-
•
the ancient oval with axis ,
and such that: Inside , are -close in . Then, we call an -canonical neighborhood of with axis .
One can compare the above with the notion of -canonical neighborhoods in 3-dimensional Ricci flow [MF10, Lecture 2].
Theorem 2.4 (Canonical neighborhood).
Let be a neck singularity of a MCF through cylindrical and spherical singularities , and be the axis of the cylindrical tangent flow at . Then for every , there exists such that every regular point of in has an -canonical neighborhood with axis in the sense of Definition 2.2.
We used balls of radius (instead of ): This is solely for the sake of notational convenience, so that it can be directly quoted in Theorem 2.5.
2.4. Consequence of almost all time regularity
Recall that throughout this paper, a cylindrical singularity has tangent flow given by the cylinder . By White’s stratification of singular set of MCF ([Whi97, Whi03]), at almost every time, the time-slice of a MCF through cylindrical and spherical singularities is smooth. Based on this, in items (3) - (6) of the following theorem, we will obtain a topologically more refined picture of neck-pinches. The shapes of the surfaces described in items (3) - (6) are illustrated in Figure 6.
Theorem 2.5.
There exists a universal constant with the following significance. Let be an inward neck singularity of a MCF through cylindrical and spherical singularities in , and be the axis of the cylindrical tangent flow at . For every and every , there exists and such that:
-
(1)
Let . Then the set
-
•
is up to scaling and translation -close in to the cylinder () in with axis and radius ,
-
•
and as a topological cylinder has on its inside.
-
•
as .
-
•
-
(2)
(Mean convex neighborhood) For every ,
Moreover, there exists some countable dense set with such that we have for every :
-
(3)
is smooth, and intersects transversely.
-
(4)
Each connected component of is a convex -ball in .
-
(5)
Denote the two connected components of by and . Then has at most one connected component for .
-
(6)
Let be a connected component of . Then satisfies one of the following:
-
•
is a connected component of that is a sphere.
-
•
consists of a connected component of that is an -ball and another ball on .
-
•
consists of a connected component of that is a cylinder and two balls on .
-
•
And the case for outward neck singularities is analogous.
Proof.
We will just do the case of inward neck singularity.
To obtain (1) and (2).
Let us first arbitrarily pick some , which we will further specify later. Let be obtained from applying the canonical neighborhood theorem (Theorem 2.4) to and . We can decrease such that it lies in the range .
By possibly further decreasing , we can guarantee (2) by the mean convex neighborhood theorem of Choi-Haslhofer-Hershkovits-White [CHHW22, Theorem 1.17]. In fact, further decreasing , we can by the definition of neck singularity assume that
-
•
is, up to scaling and translation, -close in to the cylinder () in with axis and radius ,
-
•
and as a topological cylinder has on its inside.
In particular, (1) is fulfilled.
To define and obtain (3).
Note that using [CM16, Corollary 0.6], for some set of full measure, is smooth for all . Then (3) just follows from a standard transversality argument. Namely, for each , via the transversality theorem, intersects transversely for a.e. . Hence, for some countable dense subset and some set of full measure, for all , intersects transversely. Hence, by slightly decreasing , (3) can be fulfilled.
To obtain (4).
Let us first state a lemma, which gives us the constant we need.
Lemma 2.6.
There exist constants , and , all depending only on , with the following significance.
-
•
Consider some ball , and fix a diameter line . Let be the solid cylinder with radius and axis .
-
•
Let be a regular point of some time-slice of a level set flow in , and has an -canonical neighborhood with axis .
-
•
Assume , .
-
•
Let be a smooth -disc properly embedded in , with lying on and transversely intersecting the cylindrical part of , and , such that:
-
•
is -close in to some planar -disc perpendicular to . (See Figure 7.)
Then we have:
-
•
If intersects transversely at , then the connected component of that contains is a convex -disc in , and with the intersection being transverse.
-
•
If does not intersect transversely at , then is just the point .

Proof.
By an inspection of the geometry of the sphere, cylinder, bowl, and ancient oval, for all sufficiently large and small , if then
has curvature . Thus, if the smooth -disc is sufficiently planar, the desired claim follows easily. ∎
Now, we begin proving (4). Let us assume the we chose satisfy and , with from the above lemma. By how we chose in the proof of (1) above, we can rescale by some factor such that
lies in the solid cylinder with axis and radius . Thus, by the mean convex neighborhood property (2), for all ,
Now, remember that we should focus on those . By Theorem 2.4 and , has an -canonical neighborhood with , and so does since the property is independent of scaling and translation. Let be a connected component of . By increasing , we can make arbitrarily close to being planar. Hence, we can apply Lemma 2.6. Then (4) follows immediately.
To obtain (5).
We will just do the case for . Let
Note that by (1) and . To prove that has at most one connected component for each , it suffices to prove that . Suppose the otherwise, i.e. so that there exists a sequence in , , such that contains at least two components.
Proposition 2.7.
is a convex -ball in , , and is dense in .
Proof.
To prove , it suffices to prove . Note that by Lemma 2.1, for every and we have , where is a level set function for . Since is continuous, , implying by Lemma 2.1.
Finally, to prove is dense in , it suffices to prove has empty interior (as a subset of ) since is a convex -ball. We claim that . Indeed, if , then for every spacetime neighborhood of in , for each , contains the point
Thus, , and so .
As a result,
where the last equality is by the non-fattening of [CHHW22, Theorem 1.19]. We will prove that consists entirely of singularities (of ), and then immediately we would know has empty interior using [CM16, Theorem 0.1], which says that the singular set of is contained in finitely many compact embedded Lipschitz submanifolds each of dimension at most together with a set of dimension .
Suppose by contradiction that contains some regular point . So around some neighborhood of in , is a smooth surface, with on one side. Thus, we have , with a convex -ball. Then we repeat the argument in the above proof of (4) to apply Lemma 2.6 around the point , and conclude:
-
•
is a smooth -sphere and consists entirely of regular points.
-
•
The interior of does not intersects .
-
•
intersects transversely along .
So, for some short amount of time after , would still have only one connected component by pseudolocality of (locally) smooth MCF (see [INS19, Theorem 1.5]). This contradicts the definition of . ∎
Let us continue the proof of (5). Now, for each , has finitely many connected components by transversality (3). Let be the one with the maximal diameter (measured inside ), denoted . Then by the canonical neighborhood property Theorem 2.4, assuming small, for some geodesic ball of diameter , .
Now, note is increasing in by the mean convex neighborhood property (2). Let . There are two cases: (a) , and (b) . For case (a), by the definition of , we know for sufficiently large , the neighborhood would then need to contain a connected component of other than , contradicting the definition of . So case (a) is impossible. Case (b) is also impossible since it, together with the existence of , violates Proposition 2.7 which says is dense in . This finishes the proof of (5).
To obtain (6).
Choose a connected component of . Let us foliate with planar -discs that are perpendicular to the axis . Then as in the proof of (4), we apply Lemma 2.6 to characterize the intersection of with every such planar -discs. Namely, every such set of intersections consists of convex -discs and isolated points. Viewing these sets of intersection as level sets of some function defined on , Morse theory then immediately implies (6).
This finishes the proof of Theorem 2.5. ∎
Finally, we discuss some convergence theorems of MCF through cylindrical and spherical singularities.
Proposition 2.8.
Let , with , and be MCF through neck and spherical singularities in . Assume that each and are smooth, closed hypersurfaces, with in . Then
-
(1)
For a.e. , in .
-
(2)
The spacetime tracks in the Hausdorff sense.
Proof.
By Ilmanen’s elliptic regularization (see [Ilm94, Whi09]), for any closed smooth hypersurface , there exists a unit regular cyclic Brakke flow such that , where is the -dimensional Hausdorff measure. By the mean convex neighborhood theorem [CHH22] and the nonfattening of level set flow with singularities that have mean convex neighborhood [HW20], is supported on . Then the compactness of Brakke flows ([Ilm94, Whi09]) implies that subsequentially converges to a limit unit regular cyclic Brakke flow .
Because smoothly, , and by the uniqueness of unit regular cyclic Brakke flow, a.e. for all . In particular, the regular part of equals the regular part of . Then by Brakke’s regularity theorem and a.e. time regularity of with neck and spherical singularities, we have for a.e. , .
The compactness of weak set flow shows that subsequentially converges to a limit weak set flow in Hausdorff distance. Because is supported on , we have . Meanwhile, is the biggest flow, therefore . Thus, . This also shows the uniqueness of the limit. Therefore, converges to in Hausdorff distance.
∎
3. Homology descent, homology termination, and homology breakage
In this section, we consider general level set flows in , where is not necessarily a closed hypersurface. We will introduce three new concepts. For a heuristic explanation of them, see §1.1.
Let denotes the -th homology group in -coefficients.
Definition 3.1 (Homology descent).
We define a relation on the disjoint union
as follows. Given two times , and two homology classes and , we say that descends from , and denote
if every representative and together bound some -chain , i.e. (See Figure 3.)
Clearly, in the above definition, we can interchangeably replace “every representative” with “some representative”. Note that we are using singular homology, which means that and are just singular chains.
Remark 3.2.
The relation is a partial order. Indeed, let for . Clearly . If and , then , implying . Moreover, if and , then and it readily follows from definition that .
This relation has certain favorable properties.
Proposition 3.3.
Let and . Then there exists at most one such that .
Proof.
Suppose satisfy and . Our aim is to show . Choose for . Then by definition, for some , and similarly for some . Thus, and bound . Since the map
induced by the inclusion is injective by White [Whi95, Theorem 1 (iii)], we deduce that and are homologous within . Consequently, . ∎
Remark 3.4.
Note that in the above it is possible that there does not exist any for which . As illustrated in Figure 8, after time , no homology class satisfies .

Remark 3.5.
On the other hand, there may be multiple homology classes satisfying the relation . As an example, consider the flow shown in Figure 8, where both and the trivial element of descend to the trivial element of .
In fact, precisely because of Proposition 3.3 and Remark 3.5, we chose the symbol (instead of ) to pictographically reflect that more than one homology class may descend into one, but not the other way around.
Proposition 3.6.
We focus on the case . Let and . Then there exists at least one such that .
Proof.
Choose some . By White [Whi95, Theorem 1 (ii)], can be homotoped through to some loop in . So . ∎
The following proposition says that a homology class cannot disappear and then reappear later.
Proposition 3.7.
Let , , and with . Then for every there exists a unique such that .
Proof.
We only need to prove existence, as then uniqueness would follow from Proposition 3.3.
Under our assumption, we have and such that they together bound some -chain in . Since is an open subset of Euclidean space, we can choose a representative of the -chain as a polyhedron chain. By tilting the faces appropriately, we can ensure that they do not lie entirely within any specific slice . This enables us to find as an -chain without a boundary for each . Consequently, we have , and . ∎
Based on Proposition 3.7, the following definition is well-defined.
Definition 3.8 (Homology termination).
Let .
-
•
If
is finite, then we say that terminates at time , otherwise we say never terminates.
-
•
And for each , the unique such that , if exists, is denoted .
If needed, we use in place of to specify the flow.
Note that since is open, if terminates at time then there is no such that . So is not well-defined, and every does not terminate at time . Therefore, one can interpret the time interval as the “maximal interval of existence” for .
Remark 3.9 (Trivial homology classes).
Let us also elaborate on trivial homology classes. At each time , has a unique trivial homology class . This is true even for situations like Figure 8 when the surfaces have inside and outside regions: The trivial elements of and are viewed as the same.
Example 3.10.
Let us revisit Figure 8. It is clear that terminates at time , whereas does not. In fact, will never terminate: would just become trivial for each .
Example 3.11.
Let us now instead consider the flow in Figure 9. At time , terminates while does not. In fact, becomes trivial after time , and thus it will never terminate.

Now, we introduce another concept. In Figure 8, terminates at time because, intuitively, it “breaks” at the cylindrical singularity . Similarly, in Figure 9, terminates at time because it “breaks” at the outward cylindrical singularity. The following definition provides a precise characterization of this breakage phenomenon.
Definition 3.12 (Homology breakage).
Let , , and be a compact set. Suppose the following holds:
-
•
For each , there exists such that .
-
•
For every neighborhood of , for each sufficiently close to , every element of intersects . (Recall Figure 4.)
Then we say that breaks in . We will often concern the case when is just a point , for which we say that breaks at .
One might wonder why Definition 3.12 does not require to terminate at time . This is because it is not necessary:
Proposition 3.13.
If a homology class breaks in some , then terminates at time .
Proof.
Suppose the otherwise: There exists and such that . Then there exists and that together in bound some -chain . Without loss of generality we can assume that is an -chain without boundary for each , as in the proof of Proposition 3.7. Then satisfies .
By assumption breaks in some with . Therefore, . Since is compact and is closed, there exists a neighborhood of in of the form that does not intersect . Consequently, for all , avoids . This contradicts the assumption that breaks at . ∎
Note that, vacuously, the trivial homology class does not break in any . Moreover, if a homology class breaks in and , then it also breaks in .
One might wonder whether the converse of the above proposition is true. Actually, in the case of 2-dimensional MCF through cylindrical and spherical singularities, if a homology class terminates at some time , then it actually breaks at some cylindrical singularity . This is the statement of Theorem 4.5, which is one of the main results in §4. However, we are unsure whether the converse is true in general.
Proposition 3.14.
No homology class breaks at a regular point.
Proof.
Suppose is a regular point. Then there exists a small ball around such that for all close to , is a smooth -disk. It is clear that every -chain can be homotoped to avoid . Therefore, no homology class breaks at . ∎
Proposition 3.15.
No homology class breaks at a spherical singularity.
Proof.
Suppose otherwise. Without loss of generality, suppose some breaks at some spherical singularity . Then there exists a small ball around such that for all close to , is a smooth sphere. For each such , let be a representative of . By removing the components of inside the sphere , we can assume that lies outside the sphere. Thus clearly can be homotoped within to avoid . This again contradicts the assumption that breaks at . ∎
Lastly, we conclude this section with the following proposition, which provides us with a scenario where we know the inside homology classes must terminate. Namely, if we take a compact shrinker and push it inward, then all non-trivial inside homology classes will terminate, while the outward ones will not. This proposition will be crucial for us when we use Theorem 1.1 to prove other main theorems.
Proposition 3.16.
The setting is as follows.
-
•
Let be a smooth, embedded, compact shrinker in .
-
•
Let be a surface, lying strictly inside , given by deforming within the inside region of .
-
•
Let be a surface, lying strictly outside , given by deforming within the outside region of .
-
•
Note that the first homology groups of
can be canonically identified.
-
•
Let
be the associated level set flows.
Then there exist times such that
-
(1)
For each non-trivial element , .
-
(2)
For each element , exists and is trivial.
-
(3)
For each element , exists and is trivial.
-
(4)
For each non-trivial element , .
Proof.
For the first claim, note that:
-
•
is inside .
-
•
is non-decreasing in by [ES91, Theorem 7.3].
-
•
shrinks self-similarly under the flow.
Thus, we can deduce the existence of such that for every , is empty. Consequently, for any non-trivial element , either , or still exists but is trivial. Suppose by contradiction that the latter holds. Then we can pick some such that for some
By rescaling each time slice of , we can ensure that bounds some
Projecting into the interior region of , we have that is homologically trivial, which contradicts the definition of . This concludes the proof of the first claim.
For the second claim, since shrinks self-similarly under the flow, we know that has not terminated by the time for the flow . Then by the fact that lies inside for each , which is a result of the avoidance principle, we can deduce that still exists for the flow . However, as is empty, it follows that must be trivial.
Let us define
Pick a loop . Define as the -neighborhood of , and denote
We prove the fourth claim before the third. In order to prove the fourth claim, it suffices to show for some , there exists no -chain such that , where is a closed -chain outside . Since lies outside , by the avoidance principle it suffices to prove that:
Lemma 3.17.
For some , there does not exists a -chain such that for some closed -chain .
Proof.
Choose a value of that is sufficiently close to such that . With this choice, the set is star-shaped with respect to any point on . Thus, the boundary has genus .
Suppose by contradiction that there exists a -chain such that for some closed -chain . By rescaling at each time slice , we can construct another -chain outside such that .
Since , which lies outside , is homologically non-trivial, we can pick a non-trivial loop inside such that is non-trivial. Then by the existence of , we have in too. However, this is impossible because lies outside while lies inside, and has genus by the first paragraph of this proof. ∎
This finishes proving the fourth claim of Proposition 3.16. Finally, for the third claim, since exists for the flow , it follows from the avoidance principle that exists for . Moreover, since the inside of contains , which is star-shaped, we know in . ∎
4. Homology breakage of MCF through cylindrical and spherical singularities
4.1. MCF through cylindrical and spherical singularities
In this section, we focus on 2-dimensional MCF through cylindrical and spherical singularities in , where the initial condition is a smooth, closed surface.
Proposition 4.1.
For any , no element of can break at an inward neck singularity, and no element of can break at an outward neck singularity.
Proof.
In the following proposition, we provide a more detailed description of the shape around a neck pinch at which homology class breaks. Namely, in this case, prior to the singular time, only the last bullet point of Theorem 2.5 (6) can occur, i.e. is a cylinder.
Proposition 4.2.
There exists a universal constant with the following significance. Suppose breaks at some inward neck singularity . Let . Then for each , there exist constants , , and a dense subset with , such that:
-
(1)
The first five items of Theorem 2.5 hold.
-
(2)
For each , is a solid cylinder such that its boundary consists of a connected component of that is a cylinder and two disks on .
-
(3)
Moreover, for such , every element has a non-zero intersection number (in -coefficients) with each .
The outward case is analogous.
Proof.
We will just prove the inward case. Let us apply Theorem 2.5 to to obtain the constants and the subset . Let . In addition the first five items of Theorem 2.5 will hold.
We need to show that for each sufficiently close to , satisfies the description in (2): After that we could just shrink and the set to guarantee (2). Suppose by contradiction that there exists a sequence in , , such that violates the description in (2). Fix one . Note that Theorem 2.5 (5) and (6) together imply that can have at most one cylindrical component. Thus, in our case, actually has no cylindrical component. As a result, any connected component of satisfies either one of the following by Theorem 2.5 (6):
-
•
is a connected component of that is a sphere.
-
•
consists of a connected component of that is an disc and another disc on .
In either situation, any element of can be perturbed to avoid . Applying this argument to each , we obtain a contradiction to the fact that breaks at .
Finally, to prove (3), it suffices to show that for each sufficiently close to , satisfies the description of (3): Then we could just shrink , and we would be done. Suppose otherwise, so that there exists a sequence in , , such that violates the description of (3). Then for each , we can find a loop with intersection number zero with some connected component of . In fact, since is a cylinder by (2), has intersection number zero with both connected components of (which are discs). To contradict the fact that breaks at , it suffices to find another element of that avoids .
Indeed, this can be proved as follows. We can assume intersects transversely. Since has intersection number zero with , we can pair up each positive intersection point of with a negative one. Now fix a pair, and draw a line segment on to connect the pair of points. Adding and to , and slightly pushing the resulting curve away from around , we can obtain another representative of that avoids this pair of intersection points. And we do this for each pair. Then at the end, we get a curve belonging to that avoids completely. Then, we repeat this process with , to get a curve that avoids too. Lastly, we discard all connected components of the curve that are in , which are all trivial as is a solid cylinder, to obtain an element of that avoids , as desired. ∎
Denote by the set of inward spherical singularities of , and by the set of inward neck singularities of . Similarly, we define and . Then, we denote by the slice of at time , and proceed similarly for the other three sets.
Lemma 4.3.
and are compact sets.
Proof.
We only show is compact and the proof for is the same. It suffices to show . By the semi-continuity of the Gaussian density, a limit point of must be a neck singularity. Hence it suffices to show . We prove by contradiction: Suppose not, then , and by mean convex neighborhood theorem, there is a neighborhood of and such that the MCF in moves outward. This contradicts the assumption that is a limit point of . ∎
Proposition 4.4.
Suppose terminates at some time . Then breaks in . The outward case is analogous.
Proof.
We will only prove the inward case, as the outward case follows analogously. Suppose the otherwise: There exist a neighborhood of in , an increasing sequence of times , and elements such that each is disjoint from .
By the mean convex neighborhood theorem and the compactness of and from Lemma 4.3, we can further pick open neighborhoods with
an open neighborhood of , and two times such that:
-
•
and are disjoint.
-
•
In the time interval , evolves inward (i.e.
for every ) while evolves outward.
By Huisken’s analysis of spherical singularities (see also the special case of [CM16, Theorem 4.6]), each spherical singularity is isolated in spacetime. Therefore, the limit points of spherical singularities can only be cylindrical singularities.
We claim that after appropriately shrinking the time interval ,
has only finitely many singular points, and we can thus assume such singular points all are spherical singularities at time . In fact, suppose not, there exists a sequence of distinct singular points outside , with singular time . Then by the compactness of the singular set of and the previous paragraph, there is a subsequence converging to a cylindrical singularity in . This contradicts our choice of the ’s.
As a consequence of the claim, by shrinking and the neighborhoods and , we can assume
consists only of smooth points. Furthermore, we can choose a neighborhood of such that is a finite union of convex smooth spheres for each , using what we proved in the previous paragraph. Similarly, we can find a neighborhood for with analogous properties. We can assume the closures of are all disjoint. Moreover, evolves smoothly for .
To derive a contradiction to , we are going to prove that for some , there exists a smooth deformation of , , with , thereby letting “survive” up to time . Note that:
-
•
By the smoothness of in for ,
Thus, the velocity of the flow in this spacetime region is bounded by . Thus, since avoids , we can take a sufficiently close to such that there is not enough time for any point of to be pushed into by time .
-
•
Note that evolves outward in for .
-
•
Since and consists of spheres, we can remove the components of inside the spheres, so we may assume avoids and .
Combining the above observations, we can construct a smooth deformation of , , using the evolution of MCF, with . This contradicts that . ∎
Here comes a key theorem which supports that our definition of homology termination and breakage would accurately describe the heuristic phenomenon shown in Figure 8.
Theorem 4.5.
Suppose terminates at some time . Then breaks at some inward neck singularity .
The outward case is analogous.
Note that such may be non-unique: Consider a flow that is a thin torus collapsing into a closed curve consisting entirely of neck singularities.
Proof.
We prove the inward case as the outward case is analogous. We will prove by contradiction. Suppose that the theorem is false, meaning:
Assumption (): For every inward neck singularity , there is a neighborhood of such that it is not true that “for every time close enough to , every element of intersects ”.
Applying Theorem 2.5 to each inward neck singularity , with a constant such that and an , we obtain constants and a set of full measure satisfying the properties of Theorem 2.5.
Since is compact by Lemma 4.3, there exist such that
cover . For simplicity, we denote those balls by , while
Since terminates at time , we know that breaks in by Proposition 4.4. Thus, by definition, there exists a time with such that for each , every element of intersects . We can assume so that is smooth and intersects each transversely by Theorem 2.5 (3).
Lemma 4.6.
Proof.
Suppose the otherwise, that there exists some as above and such that . Now, pick any and . By definition, is homologous to within . Thus, is homologous to within , as the mean convex neighborhood property (Theorem 2.5 (2)) implies that for all . Therefore, , which implies that must intersect . However, since , this implies that for all , any element of must intersect . This contradicts the assumption (). ∎
Let . Let be such that
| (3) |
Without loss of generality, we can assume intersects all transversely. To finish the proof, it suffices to show that avoids : This would contradict the definition of .
Lemma 4.7.
does not intersect .
Proof.
We prove by contradiction. Suppose that intersects some . We will produce an element of whose length is too small.
Without loss of generality, we can assume that no connected component of is a closed loop. This is because we could just remove all such loops from , and the resulting curve is still in by Theorem 2.5 (6). Hence, letting be a connected component of , we can assume that is a line segment.
Now, by Theorem 2.5 (5) and our choice that , consists of at most two disks. There are two cases: Either (1) starts and ends on the same disk, say , or (2) starts and ends on different disks, and . We will show that both are impossible.
For case (1), since intersects , whose distance to is , we know that is at least . On the other hand, note that by Theorem 2.5 (1), (2), and (4), is a convex disc on with diameter less than (recall ). Thus, we can join the end points of , from to , by a segment on of length less than : See Figure 10. Then, we consider the new loop , which replaces with . This loop lies in , because bounds a disc in by Theorem 2.5 (6).

Moreover, this new loop is impossibly short:
in which the last inequality is from the definition of . Thus, a contradiction arises, and case (1) is impossible.
For case (2), suppose the starting point is in and the ending point is in . We claim that there is another connected component of such that starting point is in and ending point is in . This claim follows immediately from:
- •
-
•
By Lemma 4.6, .
-
•
Case (1) was proven impossible.
Finally, let be a segment on connecting to , and be a segment on connecting to (see Figure 11). As in case (1), we can guarantee . Hence, we consider the new loop , which replaces with . This new loop lies in , because bounds a disc in by Theorem 2.5 (6). Moreover, as in case (1), we can show that
which is a contradiction. Therefore, case (2) is also impossible. This leads to a contradiction.
∎
This finishes the proof of Theorem 4.5. ∎
4.2. MCF through cylindrical and spherical singularities from torus
In §4.2 , we will focus on 2-dimensional MCF through cylindrical and spherical singularities in , where is a smooth torus. The main goal of §4.2 is to prove the following.
Theorem 4.8.
The setting is as follows.
-
•
Let be a MCF through cylindrical and spherical singularities with a smooth torus in .
-
•
Let be a generator of , and be a generator of .
-
•
Let
Then , and for a.e. , while or is empty for a.e. .
Throughout §4.2, we will retain the notations in this theorem.
Let us first sketch the proof. By [CM16], is smooth for a.e. time. And by [Whi95], , when well-defined, is non-increasing in . Thus, there exists some time such that for a.e. , while or is empty for a.e. . Our goal is to show .
The proof consists of proving the following six claims one-by-one:
-
•
.
-
•
Let . If is a smooth torus and exists, then generates . And the case for is analogous.
-
•
.
-
•
.
-
•
If , then is trivial for each . And if , then is trivial for each .
-
•
.
We now begin the proof.
Proposition 4.9.
.
Proof.
Suppose otherwise, i.e. and both never terminate. Since is compact, eventually . So and both become trivial for some large . As a result, if we pick some loops and , then there exist 2-chain and such that and .
Now, denote by the reflection of across . Let , which can be viewed as a closed 2-chain in . Then we view . Thus, to derive a contradiction, it suffices to show that is homologically non-trivial in .
Without loss of generality, we can assume is connected by discarding all those connected components that do not contain . By Alexander duality,
One can check that actually generates as the linking number . This shows is homologically non-trivial in , contradicting the existence of . ∎
Remark 4.10.
The above proof works also in the case when is a closed surface of any genus with and linked, and the flow is a general level set flow (whose singularities are not necessarily cylindrical or spherical).
Proposition 4.11.
Let . If is a smooth torus and exists, then generates . And the case for is analogous.
Proof.
We will just prove the case for . Let be a generator of . It suffices to show up to a sign.
By definition, there exists , such that for some . On the other hand, pick a loop , then by [Whi95, Theorem 1 (ii)], there exists a homotopy in joining back to some loop (which means ). So for some integer , and so for some . If we manage to show or , then by the fact that can only descend into one class at time (Proposition 3.3), we would know or , as desired. Hence, it suffices to show that .
Let us glue and together, so that we have
Thus, since the inclusion is injective by [Whi95, Theorem 1 (iii)], in . Since is a generator by definition, , as desired. ∎
Proposition 4.12.
.
Proof.
Let us assume , as the other case is analogous. Recall that we have shown . Since , if well-defined, is non-increasing in , it suffices to prove that there exists such that for a dense set of , .
By Theorem 4.5, implies breaks at some inward neck singularity . Then, applying Proposition 4.2 to with and an , we obtain constants and a dense set with . We let , and .
Now, fix any , and let be one of the two connected component of : Recall that is a solid cylinder by Proposition 4.2. By Proposition 4.2, some element has a non-zero intersection number with . Now, we push slightly into and call that loop . Then the linking number is non-zero, with inside and outside . Hence, is non-zero, and thus has to be one, as desired. ∎
Proposition 4.13.
.
Proof.
If , we are done. So let us assume and aim to show .
Let us focus on the time , with , as defined in the proof of Proposition 4.12. We know from before. Now, consider the loops and defined in the previous proof. Then by Proposition 4.11, is a generator of , and from the construction of it is clear . So actually generates . Then by Proposition 4.11 again and the assumption , we have , possibly after changing the orientation of .
Finally, by the mean convex neighborhood property, will survive after time . So . ∎
Proposition 4.14.
If , then exists and is trivial for each . And if , then exists and is trivial for each .
Proof.
We prove the first statement and the second statement is similar. Let us retain the notation from the previous proof. By Proposition 4.2, (recall ) is close to a round cylinder. Now, enclose this cylinder by an Angenent torus, and run the MCF. Note that:
-
•
Since the time interval around given by the mean convex neighborhood property is independent of (in Proposition 4.2), we can, by making very large and thus the Angenent torus very small, assume that the mean convex neighborhood property still holds at the moment the Angenent torus vanishes.
-
•
By the avoidance principle, the distance between the Angenent torus and is non-decreasing.
Hence, when the Angenent torus vanishes, the neck has already been “cut into disconnected pieces.” As a result, the loop , which remains disjoint from the evolving surface, would have become trivial at the moment the Angenent torus disappears.
Finally, since we have already proven , to complete the proof of Theorem 4.8, it remains to show:
Proposition 4.15.
.
Proof.
This completes the proof of Theorem 4.8.
4.3. Termination time of limit of MCF
Finally, in §4.3, let us mention a proposition that describes a relationship between the termination time and a convergent sequence of initial conditions.
Proposition 4.16.
The setting is as follows.
-
•
Let , , and all be MCF through cylindrical and spherical singularities, such that each and are smooth, close hypersurfaces.
-
•
For each , assume is sufficiently close in to such that each can be canonically identified with . Moreover, in .
-
•
Let . Note that can be viewed as an element of for each too.
Then
Proof.
Let .
We first consider the case . Suppose by contradiction that there exists a subsequence and some such that for each . Pick some element with , and with . By definition, and together bound some .
Now, recall that in the Hausdorff sense by Proposition 2.8. Thus, since is compact, for all sufficiently large , . Moreover, represents for such large . This contradicts that for each .
Lastly, the case can be done similarly using the fact that the flow vanishes in finite time. ∎
5. Proof of main theorems
5.1. Proof of Theorem 1.1
Suppose by contradiction that for each , is a MCF through cylindrical and spherical singularities. For each , let
Furthermore, Propositions 4.13 and 4.14 show that either or will terminate, but not both. Consequently, we can represent as a disjoint union , where contains those for which , and contains those for which . Note that and by the assumption. Thus, the following lemma leads us directly to a contradiction.
Lemma 5.1.
The sets and are both closed.
Proof.
We will just prove that is closed. Let be an accumulation point of , and pick a sequence in with . Note that:
-
•
For each , by Theorem 4.8, for a.e. and for a.e. .
-
•
Similarly, for a.e. and for a.e. .
Thus, together with Proposition 2.8, which says in for a.e. , we know . Hence,
Note that the second equality holds because , and the inequality holds by Proposition 4.16. Thus, we know , which means for the flow , will terminate but will not. So . This shows that is closed. ∎
This finishes the proof of Theorem 1.1.
Remark 5.2.
Let us explain why Theorem 1.1 would not hold if the initial conditions have genus greater than one. For example, consider the genus surface depicted in Figure 13, where and are linked as shown. Then, the MCF actually could develop both inward and outward cylindrical singularities simultaneously, with breaking at the inward one and breaking at the outward one. This phenomenon may prevent a genus one singularity from showing up in any intermediate flow between and , in the setting of Theorem 1.1.
One might think if we choose and better, like in Figure 13, then the conclusion of Theorem 1.1 may hold. However, Figure 13 and 13 are actually homotopic to each other. In conclusion, in a genus two surface, we cannot force a genus one singularity to appear just by topology: The geometry of the initial conditions must play a role.


5.2. Proof of Corollary 1.2
Let be the level set flow starting from . We can apply Theorem 1.1 to the flows , , which shows there exists such that has a singularity that is not (multiplicity one) cylindrical or spherical. In other words, every tangent flow at is not the shrinking cylinder or sphere of multiplicity one. Recall that by [Ilm95], is a smooth, embedded, self-shrinking flow with genus at most one and has multiplicity . But the multiplicity can only be by the entropy bound and the monotonicity formula. Thus, has genus .
5.3. Proof of Theorem 1.3
5.4. Proof of Theorem 1.4
Let be a genus one embedded shrinker in with the least entropy. Recall that by [CM12] . Therefore, in order to prove Theorem 1.4, let us suppose by contradiction that is compact with index at least .
We first need a family of initial conditions to run MCF. That will be provided by the following lemma.
Lemma 5.3.
Let by any smooth, embedded, compact, -dimensional shrinker in with index at least . Let be sufficiently small. Then there exists a one-parameter family of smooth, compact, embedded surfaces such that:
-
(1)
The family varies continuous in the -topology, and each is -close to to .
-
(2)
Each has entropy less than that of .
-
(3)
and are all disjoint, with inside and outside.
Proof.
Fix an outward unit normal vector field to . Since , the eigenfunctions of its Jacobi operator, with respect to the Gaussian metric, that have negative eigenvalues include:
-
•
three induced by translation in ,
-
•
one by scaling,
-
•
the unique one-sided one which has the lowest eigenvalue, denoted ,
-
•
and at least one more, denoted ,
all of which are orthonormal under the -inner product. We will choose .
Applying the above lemma to , we obtain a one-parameter family of tori. Then
Thus, applying Corollary 1.2, and by the monotonicity formula, we obtain another embedded genus one shrinker with entropy less than , which contradicts the definition of .
5.5. Proof of Theorem 1.5
Since is rotationally symmetric, by [Liu16], it has index at least . Again, we need a family of MCF. We will apply [CM22, Theorem 1.6] of Choi-Mantoulidis. Namely, since is a minimal surface with index at least under the Gaussian metric, it has, as we saw in the proof of Lemma 5.3, two orthonormal eigenfunctions to the Jacobi operator that
-
•
have negative eigenvalues,
-
•
and are both orthogonal to the other 4 eigenfunctions induced by translation and scaling.
Now, pick an . Applying [CM22, Theorem 1.6] to the 2-dimensional function space spanned by and , we obtain a one-parameter family of smooth ancient rescaled MCF (i.e. MCF under the Gaussian metric) , , such that:
-
•
For each , in as .
-
•
lies inside while lies outside.
-
•
is a smooth family of tori, each being -close to in (see [CM22, Corollary 3.4]).
If is small enough, we can apply Theorem 1.3 to the family to obtain an such that the level set flow with initial condition would develop a singularity at which every tangent flow is given by a multiplicity one, embedded, genus one self-shrinker.
Finally, we define an ancient smooth MCF by rescaling the rescaled MCF :
Note that . Hence, combining the two flows and , we obtain an ancient MCF satisfying Theorem 1.5.
5.6. Proof of Corollary 1.7
Let be an embedded shrinker with the fourth least entropy in , whose existence was established in §1 already. Suppose by contradiction that is rotationally symmetric. Then by Kleene-Møller [KMl14], is closed with genus one. Moreover, has entropy less than since the shrinking doughnut in [DN18] does, and by [Liu16], has index at least . Therefore, Theorem 1.5 still holds with replaced by : The exact same proof will work. As a result, we obtain a genus one shrinker with entropy strictly lower than . However, the self-shrinkers with the three lowest entropy are the plane, the sphere, and the cylinder ([CIMIW13, BW17]). Contradiction arises.
References
- [ADS19] Sigurd Angenent, Panagiota Daskalopoulos, and Natasa Sesum. Unique asymptotics of ancient convex mean curvature flow solutions. J. Differential Geom., 111(3):381–455, 2019.
- [ADS20] Sigurd Angenent, Panagiota Daskalopoulos, and Natasa Sesum. Uniqueness of two-convex closed ancient solutions to the mean curvature flow. Ann. of Math. (2), 192(2):353–436, 2020.
- [And12] Ben Andrews. Noncollapsing in mean-convex mean curvature flow. Geom. Topol., 16(3):1413–1418, 2012.
- [Ang92] Sigurd B Angenent. Shrinking doughnuts. In Nonlinear diffusion equations and their equilibrium states, 3, pages 21–38. Springer, 1992.
- [BK21] Yakov Berchenko-Kogan. The entropy of the Angenent torus is approximately 1.85122. Exp. Math., 30(4):587–594, 2021.
- [Bra78] Kenneth A. Brakke. The Motion of a Surface by Its Mean Curvature. (MN-20). Princeton University Press, Princeton, 1978.
- [Bre15] Simon Brendle. A sharp bound for the inscribed radius under mean curvature flow. Invent. Math., 202(1):217–237, 2015.
- [Bre16] Simon Brendle. Embedded self-similar shrinkers of genus 0. Ann. of Math. (2), 183(2):715–728, 2016.
- [BW17] Jacob Bernstein and Lu Wang. A topological property of asymptotically conical self-shrinkers of small entropy. Duke Math. J., 166(3):403–435, 2017.
- [CCMS20] Otis Chodosh, Kyeongsu Choi, Christos Mantoulidis, and Felix Schulze. Mean curvature flow with generic initial data. arXiv preprint arXiv:2003.14344, 2020.
- [CCMS21] Otis Chodosh, Kyeongsu Choi, Christos Mantoulidis, and Felix Schulze. Mean curvature flow with generic low-entropy initial data. arXiv preprint arXiv:2102.11978, 2021.
- [CCS23] Otis Chodosh, Kyeongsu Choi, and Felix Schulze. Mean curvature flow with generic initial data ii. arXiv preprint arXiv:2302.08409, 2023.
- [CGG91] Yun Gang Chen, Yoshikazu Giga, and Shun’ichi Goto. Uniqueness and existence of viscosity solutions of generalized mean curvature flow equations. Journal of differential geometry, 33(3):749–786, 1991.
- [CHH22] Kyeongsu Choi, Robert Haslhofer, and Or Hershkovits. Ancient low-entropy flows, mean-convex neighborhoods, and uniqueness. Acta Math., 228(2):217–301, 2022.
- [CHHW22] Kyeongsu Choi, Robert Haslhofer, Or Hershkovits, and Brian White. Ancient asymptotically cylindrical flows and applications. Invent. Math., 229(1):139–241, 2022.
- [CIM15] Tobias Holck Colding, Tom Ilmanen, and William P Minicozzi. Rigidity of generic singularities of mean curvature flow. Publications mathématiques de l’IHÉS, 121(1):363–382, 2015.
- [CIMIW13] Tobias Holck Colding, Tom Ilmanen, William P Minicozzi II, and Brian White. The round sphere minimizes entropy among closed self-shrinkers. Journal of Differential Geometry, 95(1):53–69, 2013.
- [CM12] Tobias H Colding and William P Minicozzi. Generic mean curvature flow i; generic singularities. Annals of mathematics, pages 755–833, 2012.
- [CM15] Tobias Holck Colding and William P. Minicozzi, II. Uniqueness of blowups and łojasiewicz inequalities. Ann. of Math. (2), 182(1):221–285, 2015.
- [CM16] Tobias Holck Colding and William P Minicozzi. The singular set of mean curvature flow with generic singularities. Inventiones mathematicae, 204(2):443–471, 2016.
- [CM22] Kyeongsu Choi and Christos Mantoulidis. Ancient gradient flows of elliptic functionals and morse index. American Journal of Mathematics, 144(2):541–573, 2022.
- [CS21] Otis Chodosh and Felix Schulze. Uniqueness of asymptotically conical tangent flows. Duke Math. J., 170(16):3601–3657, 2021.
- [DN18] Gregory Drugan and Xuan Hien Nguyen. Shrinking doughnuts via variational methods. The Journal of Geometric Analysis, 28:3725–3746, 2018.
- [ES91] Lawrence C Evans and Joel Spruck. Motion of level sets by mean curvature. i. Journal of Differential Geometry, 33(3):635–681, 1991.
- [HK17] Robert Haslhofer and Bruce Kleiner. Mean curvature flow of mean convex hypersurfaces. Communications on Pure and Applied Mathematics, 70(3):511–546, 2017.
- [HS99a] Gerhard Huisken and Carlo Sinestrari. Convexity estimates for mean curvature flow and singularities of mean convex surfaces. Acta mathematica, 183(1):45–70, 1999.
- [HS99b] Gerhard Huisken and Carlo Sinestrari. Mean curvature flow singularities for mean convex surfaces. Calculus of Variations and Partial Differential Equations, 8(1):1–14, 1999.
- [Hui84] Gerhard Huisken. Flow by mean curvature of convex surfaces into spheres. J. Differential Geom., 20(1):237–266, 1984.
- [Hui90] Gerhard Huisken. Asymptotic behavior for singularities of the mean curvature flow. Journal of Differential Geometry, 31(1):285–299, 1990.
- [HW20] Or Hershkovits and Brian White. Nonfattening of mean curvature flow at singularities of mean convex type. Communications on Pure and Applied Mathematics, 73(3):558–580, 2020.
- [Ilm92] Tom Ilmanen. Generalized flow of sets by mean curvature on a manifold. Indiana University mathematics journal, pages 671–705, 1992.
- [Ilm94] Tom Ilmanen. Elliptic regularization and partial regularity for motion by mean curvature, volume 520. American Mathematical Soc., 1994.
- [Ilm95] Tom Ilmanen. Singularities of mean curvature flow of surfaces. preprint, 1995.
- [INS19] Tom Ilmanen, André Neves, and Felix Schulze. On short time existence for the planar network flow. J. Differential Geom., 111(1):39–89, 2019.
- [KKM18] Nikolaos Kapouleas, Stephen James Kleene, and Niels Martin Møller. Mean curvature self-shrinkers of high genus: non-compact examples. Journal für die reine und angewandte Mathematik (Crelles Journal), 2018(739):1–39, 2018.
- [KMl14] Stephen Kleene and Niels Martin Mø ller. Self-shrinkers with a rotational symmetry. Trans. Amer. Math. Soc., 366(8):3943–3963, 2014.
- [Lee21] Tang-Kai Lee. Compactness and rigidity of self-shrinking surfaces. arXiv preprint arXiv:2108.03919, 2021.
- [Liu16] Zihan Hans Liu. The index of shrinkers of the mean curvature flow. arXiv preprint arXiv:1603.06539, 2016.
- [LS22] Zhengjiang Lin and Ao Sun. Bifurcation of perturbations of non-generic closed self-shrinkers. Journal of Topology and Analysis, 14(04):979–999, 2022.
- [MF10] John W Morgan and Frederick Tsz-Ho Fong. Ricci flow and geometrization of 3-manifolds, volume 53. American Mathematical Soc., 2010.
- [Møl11] Niels Martin Møller. Closed self-shrinking surfaces in via the torus. arXiv preprint arXiv:1111.7318, 2011.
- [Ngu14] Xuan Hien Nguyen. Construction of complete embedded self-similar surfaces under mean curvature flow, part iii. Duke Mathematical Journal, 163(11):2023–2056, 2014.
- [OS88] Stanley Osher and James A. Sethian. Fronts propagating with curvature-dependent speed: algorithms based on Hamilton-Jacobi formulations. J. Comput. Phys., 79(1):12–49, 1988.
- [Sun23] Ao Sun. Local entropy and generic multiplicity one singularities of mean curvature flow of surfaces. J. Differential Geom., 124(1):169–198, 2023.
- [SW09] Weimin Sheng and Xu-Jia Wang. Singularity profile in the mean curvature flow. Methods Appl. Anal., 16(2):139–155, 2009.
- [SW20] Ao Sun and Zhichao Wang. Compactness of self-shrinkers in r3 with fixed genus. Advances in Mathematics, 367:107110, 2020.
- [SWZ20] Ao Sun, Zhichao Wang, and Xin Zhou. Multiplicity one for min-max theory in compact manifolds with boundary and its applications. arXiv preprint arXiv:2011.04136, 2020.
- [SX21a] Ao Sun and Jinxin Xue. Initial perturbation of the mean curvature flow for asymptotical conical limit shrinker. arXiv preprint arXiv:2107.05066, 2021.
- [SX21b] Ao Sun and Jinxin Xue. Initial perturbation of the mean curvature flow for closed limit shrinker. arXiv preprint arXiv:2104.03101, 2021.
- [Wan11] Xu-Jia Wang. Convex solutions to the mean curvature flow. Annals of mathematics, pages 1185–1239, 2011.
- [Whi95] Brian White. The topology of hypersurfaces moving by mean curvature. Communications in analysis and geometry, 3(2):317–333, 1995.
- [Whi97] Brian White. Stratification of minimal surfaces, mean curvature flows, and harmonic maps. Journal für die reine und angewandte Mathematik, 488:1–36, 1997.
- [Whi00] Brian White. The size of the singular set in mean curvature flow of mean-convex sets. Journal of the American Mathematical Society, 13(3):665–695, 2000.
- [Whi03] Brian White. The nature of singularities in mean curvature flow of mean-convex sets. Journal of the American Mathematical Society, 16(1):123–138, 2003.
- [Whi05] Brian White. A local regularity theorem for mean curvature flow. Annals of mathematics, pages 1487–1519, 2005.
- [Whi09] Brian White. Currents and flat chains associated to varifolds, with an application to mean curvature flow. Duke Mathematical Journal, 148(1):41–62, 2009.