Fast Consensus Topology Design via Minimizing Laplacian Energy
Abstract
This paper characterizes the graphical properties of an optimal topology with minimal Laplacian energy under the constraint of fixed numbers of vertices and edges, and devises an algorithm to construct such connected optimal graphs. These constructed graphs possess maximum vertex and edge connectivity, and more importantly, exhibit large algebraic connectivity of an optimal order provided they are not sparse. These properties guarantee fast and resilient consensus processes over these graphs.
I Introduction
Over the past two decades, consensus has achieved great success and attracted significant attention [1, 2, 3, 4], being applied to a wide range of distributed control and computation problems [5, 6, 7, 8].
A continuous-time linear consensus process over a simple connected graph can be typically modeled by a linear differential equation of the form , where is a vector in and is the “Laplacian matrix” of . For any simple graph with vertices, we use and to denote its degree matrix and adjacency matrix, respectively. Specifically, is an diagonal matrix whose th diagonal entry equals the degree of vertex , and is an matrix whose th entry equals 1 if is an edge in and otherwise equals 0. The Laplacian matrix of is defined as . It is easy to see that any Laplacian matrix is symmetric and thus has a real spectrum. It is well known that is positive-semidefinite, its smallest eigenvalue equals 0, and its second smallest eigenvalue, called the algebraic connectivity of and denoted as , is positive if and only if is connected [9]. It has been shown that the convergence rate of continuous-time linear consensus is determined by the algebraic connectivity, in that the larger the algebraic connectivity is, the faster the consensus can be reached [2].
With the preceding facts in mind, a natural and fundamental research problem is how to design network topology to achieve faster or even the fastest consensus. The problem has been studied for many years [10, 11, 12, 13, 14, 15], to name a few. Notwithstanding these developments, the following question is still largely unsolved: Given a fixed number of vertices and edges, what are the optimal graphs that achieve maximal algebraic connectivity?
The above question presents a challenging combinatorial optimization problem, and thus, it was only partially answered for some special cases in [15]. Even though a powerful computer can execute such a combinatorial search, identifying the graphical properties of optimal graphs with maximal algebraic connectivity remains a mystery, not to mention the associated computational complexity.
In this paper, we propose approximating the maximal algebraic connectivity by minimizing the “Laplacian energy” defined as follows.
Definition 1
The Laplacian energy of a simple graph with vertices is , where , are eigenvalues of the Laplacian matrix of .
The above concept was first proposed in [16] and finds applications/connections to ordinary energy for -electron energy in molecules [17] and the first Zagreb index [18]. It is worth mentioning that there have been various mathematical definitions for network energy [19], including the earliest version of Laplacian energy [20].
We are motivated to appeal to the concept of Laplacian energy for designing fast/optimal consensus network topologies due to the following observations: We list all maximal algebraic connectivity graphs under the constraint of fixed numbers of vertices and edges for the cases where the vertex number ranges from 4 to 7. These are respectively given in Figures 1 through 4.111The maximal algebraic connectivity graphs depicted in Figures 2 through 4 are sourced from [15]. We omit the case of as well as some complete graphs, as these graphs are unique. For , it will be very computationally expensive to go through all possible graphs. For each of these graphs, we list its corresponding Laplacian energy , and for each pair of vertex number and edge number , we list the minimal Laplacian energy among all possible graphs. It is readily apparent that among all simple graphs with a fixed number of vertices and edges, maximal algebraic connectivity and minimal Laplacian energy coincide in most cases. The non-matching cases, highlighted in orange, are always centered in sparse cases and occasionally scattered in medium-density cases. This suggests that we may design fast consensus topologies by minimizing Laplacian energy for most scenarios. It turns out that, given a fixed number of vertices and edges, minimizing Laplacian energy is a much easier task and considerably more computationally efficient.




In this paper, we first characterize the degree distribution properties of minimal Laplacian energy graphs under the constraint of fixed numbers of vertices and edges, and then devise an algorithm to construct such connected optimal graphs (cf. Section II). Next, we show that the minimal Laplacian energy graphs generated by the proposed algorithm exhibit strong resilience, featuring maximum vertex and edge connectivity (cf. Section III). Finally, we investigate the spectral properties of the Laplacian matrices of these generated minimal Laplacian energy graphs, and show that they possess large algebraic connectivity of optimal order, provided they are not sparse (cf. Section IV). Overall, we propose a computationally efficient approach to designing fast and resilient consensus topologies by minimizing Laplacian energy.
II Minimal Laplacian Energy
It has been proved in [16] that , where denotes the degree of vertex . It immediately implies that the Laplacian energy of a simple graph will increase after adding any additional edge. Thus, the Laplacian energy of an -vertex graph achieves its maximum value, , when the graph is complete. Various upper and lower bounds on have been established [21]. There has been an effort in the literature to identify optimal topologies that minimize the Laplacian energy for certain types of graphs. For example, among all -vertex connected graphs, the Laplacian energy achieves its minimum value when the graph is the path [16]. Another example is that among all connected graphs with chromatic number , the Laplacian energy achieves its minimum value, , by the -vertex complete graph [22]. Notwithstanding these results, the following question has never been studied: Given a fixed number of vertices and edges, what are the optimal graphs that achieve minimal Laplacian energy?
This section solves the above open problem. To state our main results, we use to denote the floor function.
Theorem 1
Among all simple graphs with vertices and edges, the minimal Laplacian energy is with , which is achieved if, and only if, vertices are of degree and the remaining vertices are of degree .
The theorem states that the sequence of vertex degrees, arranged in descending order, follows the following pattern:
| (1) |
In the special case when is an integer, all vertices are of degree . Thus, Theorem 1 implies that minimal Laplacian energy graphs have an (almost) uniform degree distribution, which is intuitive from the fact that . Such a graph, whose degree difference is at most 1, is called almost regular graph. Such a graph, in which the degree difference is at most 1, is called an almost regular graph [23].
It is easy to check that the total degree sum of a minimal Laplacian energy graph specified by Theorem 1 equals , which is consistent with the assumption of edges. Moreover, it can be proved that such a degree distribution always admits a graph using the Erdős-Gallai theorem [24, 25].
To prove Theorem 1, we need the following results.
Lemma 1
(Theorem 3 in [16]) For any simple graph with vertices, .
Lemma 2
Proof of Theorem 1: From Lemma 1, . Since , minimizing is equivalent to minimizing . Without loss of generality, assume that .
We first minimize without considering the constraint that form the degree sequence of a simple graph. Since all are integers and their summation is a fixed constant, it is easy to see that is minimized by the unique sequence pattern given in (1), in which and are respectively the unique quotient and remainder of divided by . With such a degree sequence, .
To prove the theorem, it is now sufficient to show that, given a fixed number of vertices and edges , there exists a graph with the degree sequence specified in (1). From Lemma 2, it is equivalent to show that (I) is even and (II) for all . First note that , which implies that condition (I) holds. Next we will validate condition (II).
Since and , it follows that . In the case when , it must be true that , and thus is a complete graph with all , which satisfies (1). Therefore, we only need to consider from here on. To validate condition (II) for all , we consider and separately. First, in the case when , since , for all . Then, . Meanwhile, since for all , . Since , it follows that . Thus, condition (II) holds for all .
Next, we consider the case when . Since , for all , , in which we used in the last equality. Then, in this case condition (II) is equivalent to
| (2) |
Recalling the degree sequence given in (1), we will now consider the following two cases.
Case 1: . From (1), . Then, inequality (2) is equivalent to . Let , which is a quadratic function of and achieves its minimum at . Since is an integer in the interval , the function achieves its minimum at , whose value is . Since and , . Since is even and must be odd, , which implies that . Therefore, (2) holds in this case.
Case 2: . From (1), . Then, inequality (2) is equivalent to . Let , which is a quadratic function of and achieves its minimum at . Recall that is under consideration. Then, is an integer in the interval . We will consider two scenarios, and , separately.
First assume , which is equivalent to . Then, is an integer in the interval , and thus the function over this interval achieves its minimum at . Treat this expression as a quadratic function of which achieves its maximum at . Since is an integer in the interval , the function over this interval satisfies . Since , implying , and both and are even, . Therefore, , and thus (2) holds in this scenario.
Next assume , which is equivalent to . Then, is an integer in the interval , and thus the function over this interval achieves its minimum at . Note that if , this minimum value equals , and thus (2) holds. Hence, in the remainder of the proof, we need only consider . Also note that with , if , for which may equal 0 or 1, this minimum value is always positive, and thus (2) holds. Hence, we also need only consider in the remainder of the proof. Treat this expression as a quadratic function of which, without any restriction on , achieves its minimum value of when . But it has been assumed that . This minimum value is achievable only if , which is equivalent to . Also treat this minimum value as a quadratic function of which achieves its maximum at . Since , it follows that . Then, the quadratic function of , over the interval is always no smaller than , which can be straightforwardly verified to be greater than 0 for all . This implies that (2) holds. On the other hand, if , which is equivalent to . Then, the quadratic function of , over the interval , achieves its minimum when , with the corresponding minimum value being , which was proven to be positive at the end of the last paragraph. Therefore, (2) always holds in this scenario.
Theorem 1 provides a simple graphical condition, dependent solely on the degree distribution, that characterizes minimal Laplacian energy graphs. The following example shows that such a degree distribution condition does not guarantee connectivity. Consider all simple graphs with 6 vertices and 6 edges (i.e., ), Theorem 1 identifies three minimal Laplacian energy graphs, as illustrated in Figure 5.

In many network applications, such as distributed control and optimization [6, 26], connected graphs are often desired. The following theorem states that a connected optimal graph with the same minimal Laplacian energy always exists.
Theorem 2
Among all connected simple graphs with vertices and edges, the minimal Laplacian energy is with , which is achieved if, and only if, vertices are of degree and the remaining vertices are of degree .
Proof of Theorem 2: In light of Theorem 1, it is sufficient to show that there exists a connected graph whose degree sequence satisfies (1). Such a graph must indeed exist, as it follows directly from Theorem 3.
The above theorem implicitly assumes that , otherwise there is no such connected graph. In a special case when , all connected graphs are trees. It is not hard to see that the following result is a direct consequence of Theorem 2.
Corollary 1
Among all simple trees with vertices, the minimal Laplacian energy is , which is achieved by the path.
For general pairs of and with , the optimal connected graph may not be unique. For example, for the case when and , two connected minimal Laplacian energy graphs are illustrated in Figure 6.
We next present the following algorithm, which provides a procedure to construct a minimal Laplacian energy graph that is connected and satisfies the degree distribution specified by Theorem 2.
Algorithm 1: Given and with , without loss of generality, label vertices from 1 to . Set , which implies that .
Case 1: The integer is even.
-
(1)
If , for each , connect vertex with each of those vertices whose indices are , .
-
(2)
If where is an even integer, first construct the graph as done in Case 1 (1), and then for each , connect vertex and vertex .
Case 2: The integer is odd.
-
(1)
If is even and , for each , connect vertex with each of those vertices whose indices are , .
-
(2)
If is even and where is an even integer, first construct the graph as done in Case 2 (1), and then for each , connect vertex and vertex .
-
(3)
If is odd and , first for each , connect vertex with each of those vertices whose indices are , , and then for each , connect vertex and vertex .
-
(4)
If is odd and where is an even integer, first construct the graph as done in Case 2 (3), and then for each , connect vertex and vertex .
Theorem 3
Algorithm 1 constructs a connected simple graph with vertices of degree and vertices of degree .
Proof of Theorem 3: First of all, any graph generated by Algorithm 1 must be connected, as each case within the algorithm contains a cycle with a vertex sequence . Next, it is straightforward to verify that the graphs generated by each case of the algorithm satisfy the degree sequence specified by (1).
It can be straightforwardly checked that in the case when , Algorithm 1 will follow Case 1 (1) and construct the 6-vertex path, which is consistent with Corollary 1. We further present six tailored examples, each corresponding to a distinct case outlined in Algorithm 1, as depicted in Figures 7 to 9. These examples collectively validate Theorem 3.



III Connectivity Resilience
The graphs generated by Algorithm 1 exhibit “optimal” connectivity properties. To see this, we introduce two well-known connectivity concepts in graph theory: vertex connectivity, denoted as , which is defined as the minimum number of vertices whose removal would disconnect graph , and edge connectivity, denoted as , which is defined as the minimum number of edges whose removal would disconnect graph . For the complete graph with vertices, it is obvious that its edge connectivity equals . However, there is no subset of vertices whose removal disconnects the complete graph. It is conventional to set its vertex connectivity as [27, page 149].
Theorem 4
Let be the graph generated by Algorithm 1 with vertices and edges. Then, .
The theorem implies that the graphs constructed by Algorithm 1 always have the maximum vertex and edge connectivity. To see this, consider any graph with vertices and edges. Its minimum degree is at most . Since by definition and [28, Theorem 5], it follows that .
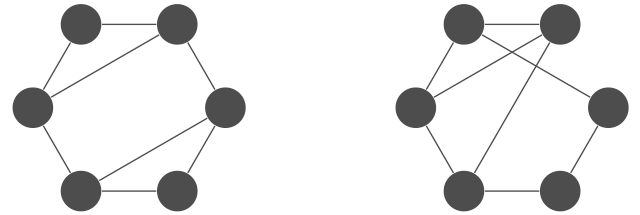
Recall that all graphs generated by Algorithm 1 are almost regular graphs with the degree sequence specified in (1). In general, almost regular graphs do not necessarily have . To see this, consider two examples in Figure 10. The left almost regular graph has vertices and edges, but its vertex connectivity is 2 (by removing vertex 2 and vertex 5), which is smaller than . The right almost regular graph has vertices and edges, but its vertex connectivity is 1 (by removing vertex 6), so is its edge connectivity (by removing the edge between vertex 5 and vertex 6), both being smaller than .

To prove Theorem 4, we need the following notation and lemma. Let be a vertex subset of graph . We use to denote the graph resulting from removing all vertices in , along with the edges connecting any vertex in , from .
Lemma 3
Let be a simple graph with vertices and be a positive integer. Suppose that for any pair of distinct vertices with , is an edge in . Let be any vertex subset of and be any two vertices in such that and . If there are no vertices in whose indices are consecutive integers in the interval , then there exists a path between and in .
Proof of Lemma 3: We explicitly construct a such path between and . Consider a sequence of vertex indices: and for any ,
-
•
If , define to be the largest index in such that vertex is not in . Such always exists because there are no vertices in whose indices are consecutive integers in .
-
•
Otherwise, the sequence ends.
By construction, vertices and are adjacent. Let be the final term of this sequence. Then .
-
•
If , we have found the path .
-
•
Otherwise, vertex is adjacent to , so we have found the path .
Either way, there is a path between and .
Proof of Theorem 4: From the preceding discussion, . Thus, to prove the theorem, it is sufficient to show .
Graphs constructed in Case 1 (2) are formed by adding edges to graphs in Case 1 (1); graphs constructed in Case 2 (2) are formed by adding edges to graphs in Case 2 (1); graphs constructed in Case 2 (4) are formed by adding edges to graphs in Case 2 (3). Since vertex connectivity is non-decreasing when we add edges, it suffices to check for graphs from Case 1 (1), Case 2 (1), and Case 2 (3) only.
To prove , we will equivalently show that for any subset of vertices, is connected. Say that a vertex is deleted if it is in . Let be two arbitrary non-deleted vertices, where . It suffices to show that there is a path between and in .
Case 1 (1): From the algorithm description, there is an edge between any two vertices whose indices differ by at most . Since vertices are deleted, we have either
-
•
There are no deleted vertices whose indices are consecutive integers in .
-
•
Or there are no deleted vertices whose indices are consecutive integers in .
In either scenario, Lemma 3 implies that there is a path between and in .
Case 2 (1): From the algorithm description, there is an edge between any two vertices whose indices differ by at most and an edge between any vertex and vertex . If either
-
•
There are no deleted vertices whose indices are consecutive integers in .
-
•
Or there are no deleted vertices whose indices are consecutive integers in .
then Lemma 3 implies that there is a path between and in .
Thus, it remains to consider the case in which there are deleted vertices whose indices are consecutive integers in and deleted vertices whose indices are consecutive integers in . Let the former set of vertex indices be and the latter be . Since , we see that . Let , where indices are taken mod .
If , we directly obtain the path , which is what we wanted to show. Thus, suppose . We will only consider the case because the case is symmetric.
Since , we have , so . Then the length of the interval is greater than .
-
•
If , then does not contain , so consider the path . See the left illustration in Figure 11 for this case.
-
•
Otherwise, . Since the length of the interval is greater than , we see that does not contain . Consider the path . See the right illustration in Figure 11 for this case.
In both scenarios, we found a path between and in .
Case 2 (3): From the algorithm description, there is an edge between any two vertices whose indices differ by at most and an edge between and for any .
Using the same argument as in Case 2 (1), Lemma 3 solves all scenarios, except the one where there are deleted vertices whose indices are consecutive integers in and deleted vertices whose indices are consecutive integers in . Let the former set of vertex indices be and the latter be . Since , we see that . Let , where indices are taken mod .
The condition that there is an edge between and for any translates to:
-
•
Vertices with index at most are adjacent to
-
•
Vertices with index at least are adjacent to
-
•
Vertex is adjacent to both and .
Let be adjacent to , and be adjacent to , where . We claim that the length of the interval is greater than .
Since , we have , so the length of the interval is at least . For the length to equal , vertex must be adjacent to , and vertex must be adjacent to . If , we immediately reach a contradiction because . If , change to . If equals , change to . Thus, we can always ensure that the length of the interval is greater than .
-
•
If , then does not contain , so consider the path .
-
•
Otherwise, . Since the length of the interval is greater than , we see that does not contain , so consider the path .
In both scenarios, we found a path between and in .
In all cases, we have found a path between any two vertices in , so is connected. Thus, , which completes the proof.
IV Fast Consensus
In this section, we study the algebraic connectivity of the minimal Laplacian energy graphs generated by Algorithm 1. We will show that the generated “dense” graphs possess large algebraic connectivity, while the generated “sparse” graphs do not. This finding is consistent with the observations from the figures in the introduction.
Among all non-complete graphs with vertices and edges, it is known that [9, Theorem 4.1]. From the preceding discussion, it follows that for all non-complete graphs. Theorem 5 gives a lower bound on algebraic connectivity of graphs constructed by Algorithm 1.
Theorem 5
Let be the graph generated by Algorithm 1 with vertices and edges. Then,
| (3) |
where and , with equality holding if the graph is constructed in Case 1 (1) and Case 2 (1).
Note that . We will use this fact without special mention in the sequel.
To prove Theorem 5, we need the following concept and results. A circulant matrix is a square matrix in which all rows are composed of the same entries and each row is rotated one entry to the right relative to the preceding row. The spectrum of any circulant matrix can be completely determined by its first row entries, as specified in the following lemma:
Lemma 4
(Theorem 6 in [29]) If is an circulant matrix whose first row entries are , then its eigenvalues are , , where is the imaginary unit.
Lemma 5
For any integers and ,
where , and the maximum is achieved if, and only if, or .
Proof of Lemma 5: From the angle addition and subtraction formulae, for any . Let and . Since for all integers , it follows that for all integers ,
Summing this relation over index from to ,
It remains to identify the optimal integers over the interval that maximize . To this end, define a function . Figure 12 provides an example plot. First, we check that is symmetric around . Since is odd,
Thus, it suffices to show for all integers . Second, we show that in the interval , attains its maximum of as approaches or . Clearly, . Meanwhile,
Finally, observe that has roots at and has a maximum/minimum in each interval , where . Since by assumption, we have , so is always in the leftmost interval and is closest to -coordinate of the global maximum at 0. Hence, for all integers .
Proof of Theorem 5: Note that for any simple graph with vertices and edges, . Also, if , the graph is complete, so [9] and inequality (3) holds. Thus, we only consider in the rest of the proof. Since the algebraic connectivity of a non-complete graph will not decrease after adding an edge [9, Corollary 3.2], it suffices to prove (3) for Case 1 (1), Case 2 (1), and Case 2 (3).
Case 1 (1): From the algorithm description, it is straightforward to verify that the Laplacian matrix of the generated graph is a circulant matrix, with its first row entries being
From Lemma 4, its eigenvalues are
It is easy to see that , which is the smallest eigenvalue. Since the generated graph is connected, all other eigenvalues are positive. Since in Case 1, is even, and thus . From Lemma 5, the maximum among , is . Thus, the second smallest eigenvalue .
Case 2 (1): From the algorithm description, it is straightforward to verify that the Laplacian matrix of the generated graph is a circulant matrix, with its first row entries being
From Lemma 4, its eigenvalues are
Since in Case 2, is odd, and thus . Using the same argument as in Case 1 (1), the second smallest eigenvalue .
Case 2 (3): In this case, the Laplacian matrix of the generated graph is not a circulant matrix. Consider the spanning subgraph of , denoted as , with an edge set defined such that for each pair of and , there is an edge between vertex and vertex . It is straightforward to verify that is connected and its Laplacian matrix is a circulant matrix, with its first row entries being
Using the same argument as in Case 1 (1), the second smallest eigenvalue . Since is a spanning subgraph of , .
From Theorem 5, the graphs constructed by Algorithm 1 in Case 1 (1) and Case 2 (1) have an explicit algebraic connectivity expression, , which can be bounded as follows:
Lemma 6
For any graph generated by Algorithm 1 in Case 1 (1) or Case 2 (1), , where and .
Proof of Lemma 6: Using the Taylor series and basic calculus, it is straightforward to show that for all . Applying the upper bound in this inequality to leads to , and applying the lower bound to leads to . Then,
Since , it follows that . Thus,
Next we apply to , which leads to . With this and the fact , it follows that .
More can be said. Let . Then, . From Lemma 6, . We have thus proved the following:
Corollary 2
Let be any graph generated by Algorithm 1 in Case 1 (1) or Case 2 (1). If , then .
Let us agree to call a graph with vertices and edges sparse if its average degree is much smaller than , and dense if .
Among all connected graphs with vertices and edges, it is known that [9, Theorem 4.3]. Since , it is easy to see that this lower bound of is strictly less than 1 if . Corollary 2 implies that when the minimal Laplacian energy graph generated by Algorithm 1 in Case 1 (1) or Case 2 (1) is sparse, its algebraic connectivity is small. This suggests that small/minimal Laplacian energy and large/maximal algebraic connectivity do not match for sparse graphs. This observation is not surprising; for instance, in the special case of tree graphs where , the maximal algebraic connectivity graph is the star, while the minimal Laplacian energy graph is the path, which are opposites. The maximal algebraic connectivity graphs for some special sparse cases were theoretically identified in [15, Theorems 1, 2, 4].
In contrast to sparse graphs, the following result shows that generated dense graphs have large algebraic connectivity.
Corollary 3
Let be the graph constructed by Algorithm 1 with vertices and edges. If , then .
Among all connected non-complete graphs with vertices and edges, it is known that [9, Theorem 4.1]. From the discussion in Section III, . Note that . Thus, Corollary 3 implies that when the minimal Laplacian energy graph generated by Algorithm 1 is dense, its algebraic connectivity is large. In fact, it is known that for all connected almost regular graphs with vertices and edges [30, Theorem 1]. Therefore, the dense graphs generated by Algorithm 1 exhibit nearly optimal algebraic connectivity.
Proof of Corollary 3: From Theorem 5, to prove the corollary, it is sufficient to show . In the case when is odd, , and the target inequality simplifies to . In the case when is even, , and the target inequality simplifies to . Since is an integer in the interval and it is easy to verify that , it follows that . Then, . Since the sine function is decreasing on the interval , . Thus, it is sufficient to prove for all even in the interval . To this end, we define the following function:
We then apply Newton’s method to obtain a bound on the largest root of in the interval . Figure 13 is a visualization for . Set the initial estimate . The first estimation is the intersection of the tangent line at with the -axis:
Since is concave downward on the interval , the actual largest root must be strictly less than . Hence, for all , must be nonpositive, which completes the proof.
The graphs constructed by Algorithm 1 in Case 1 (1), which actually belong to the so-called regular lattices. A simple graph with vertices is called a -regular lattice, with being an even integer in the interval , if each vertex is adjacent to each of those vertices whose indices are , [31]. It is easy to see that any graph with vertices generated by Algorithm 1 in Case 1 (1) is a -regular lattice. Lemma 6 immediately implies that the algebraic connectivity of a -regular lattice is of the order .
Regular lattices are closely related to Watts-Strogatz small-world networks, which are generated by randomly rewiring edges in a regular lattice. The rewiring procedure involves iterating through each edge, and with probability , one endpoint is moved to a new vertex chosen randomly from the lattice. Double edges and self-loops are not allowed in this process, so small-world networks are simple graphs [31].
The work of [32] defines the algebraic connectivity gain, , as the algebraic connectivity of the small-world network formed by rewiring with probability divided by the algebraic connectivity of the regular lattice [32, Definition 1]. By running simulations with , the paper conjectures that the maximum is on the order of [32, Observation (ii), page 4], which implies that small-world networks can reach consensus significantly faster than regular lattices. Lemma 6 implies that is on the order of . Thus, if one can show that is on the order of , then the conjecture in [32] would be mathematically verified. Whether small-world networks can achieve algebraic connectivity of order has so far eluded us, but Lemma 6 provides a helpful first step in addressing this question.
V Conclusion
This paper proposes a novel approach to designing fast consensus topologies by minimizing Laplacian energy, marking the first step in this direction. Although both sparse and dense graphs have been analyzed, and the findings are consistent with the observations in the introduction, the scattered non-matching cases for medium-dense graphs (see Figures 3 and 4) have not been addressed. These graphs belong to complete bipartite graphs. A simple graph is called bipartite if its vertices can be partitioned into two classes so that every edge has endpoints in different classes. The complete bipartite graph is the bipartite graph with vertices in one class, vertices in the other class, and all edges between vertices of different classes [33, page 17]. It is worth mentioning that maximal algebraic connectivity graphs were identified as complete bipartite graphs for some special medium-dense graphs [15, Theorem 3, Table I]. Understanding these observations is a direction for future research.
References
- [1] A. Jadbabaie, J. Lin, and A.S. Morse. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Transactions on Automatic Control, 48(6):988–1001, 2003.
- [2] R. Olfati-Saber and R.M. Murray. Consensus problems in networks of agents with switching topology and time-delays. IEEE Transactions on Automatic Control, 49(9):1520–1533, 2004.
- [3] L. Moreau. Stability of multi-agent systems with time-dependent communication links. IEEE Transactions on Automatic Control, 50(2):169–182, 2005.
- [4] W. Ren and R.W. Beard. Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE Transactions on Automatic Control, 50(5):655–661, 2005.
- [5] J.A. Fax and R.M. Murray. Information flow and cooperative control of vehicle formations. IEEE Transactions on Automatic Control, 49(9):1465–1476, 2004.
- [6] R. Olfati-Saber, J.A. Fax, and R.M. Murray. Consensus and cooperation in networked multi-agent systems. Proceedings of the IEEE, 95(1):215–233, 2007.
- [7] A. Nedić and A. Ozdaglar. Distributed subgradient methods for multi-agent optimization. IEEE Transactions on Automatic Control, 54(1):48–61, 2009.
- [8] S. Mou, J. Liu, and A.S. Morse. A distributed algorithm for solving a linear algebraic equation. IEEE Transactions on Automatic Control, 60(11):2863–2878, 2015.
- [9] M. Fiedler. Algebraic connectivity of graphs. Czechoslovak Mathematical Journal, 23(2):298–305, 1973.
- [10] S. Kar and J.M.F. Moura. Topology for global average consensus. In Proceedings of the 40th Asilomar Conference on Signals, Systems and Computers, pages 276–280, 2006.
- [11] M. Cao and C.W. Wu. Topology design for fast convergence of network consensus algorithms. In Proceedings of the 2007 IEEE International Symposium on Circuits and Systems, pages 1029–1032, 2007.
- [12] M. Rafiee and A.M. Bayen. Optimal network topology design in multi-agent systems for efficient average consensus. In Proceedings of the 49th IEEE Conference on Decision and Control, pages 3877–3883, 2010.
- [13] R. Dai and M. Mesbahi. Optimal topology design for dynamic networks. In Proceedings of the 50th IEEE Conference on Decision and Control, pages 1280–1285, 2011.
- [14] D. Xue, A. Gusrialdi, and S. Hirche. A distributed strategy for near-optimal network topology design. In Proceedings of the 21st International Symposium on Mathematical Theory of Networks and Systems, pages 7–14, 2014.
- [15] K. Ogiwara, T. Fukami, and N. Takahashi. Maximizing algebraic connectivity in the space of graphs with a fixed number of vertices and edges. IEEE Transactions on Control of Network Systems, 4(2):359–368, 2017.
- [16] M. Lazić. On the Laplacian energy of a graph. Czechoslovak Mathematical Journal, 56(131):1207–1213, 2006.
- [17] I. Gutman. The energy of a graph (in German). Berichte der Mathematisch-Statistischen Sektion im Forschungszentrum Graz, 103:1–22, 1978.
- [18] I. Gutman and K.C. Das. The first Zagreb index 30 years after. MATCH Communications in Mathematical and in Computer Chemistry, 50:83–92, 2004.
- [19] W. So, M. Robbiano, N. Abreu, and I. Gutman. Applications of a theorem by Ky Fan in the theory of graph energy. Linear Algebra and its Applications, 432(9):2163–2169, 2010.
- [20] I. Gutman and B. Zhou. Laplacian energy of a graph. Linear Algebra and its Applications, 414(1):29–37, 2006.
- [21] B. Zhou. On sum of powers of the Laplacian eigenvalues of graphs. Linear Algebra and its Applications, 429(8–9):2239–2246, 2008.
- [22] Y. Liu and Y.Q. Sun. On the second Laplacian spectral moment of a graph. Czechoslovak Mathematical Journal, 60(135):401–410, 2010.
- [23] N. Alon, S. Friedland, and G. Kalai. Regular subgraphs of almost regular graphs. Journal of Combinatorial Theory, 37:79–91, 1984.
- [24] P. Erdős and T. Gallai. Graphs with prescribed degrees of vertices (in Hungarian). Matematikai Lapok, 11:264–274, 1960.
- [25] A. Tripathi, S. Venugopalan, and D.B. West. A short constructive proof of the Erdős-Gallai characterization of graphic lists. Discrete Mathematics, 310:843–844, 2009.
- [26] A. Nedić and J. Liu. Distributed optimization for control. Annual Review of Control, Robotics, and Autonomous Systems, 1:77–103, 2018.
- [27] D.B. West. Introduction to Graph Theory. Prentice-Hall, second edition, 2000.
- [28] H. Whitney. Congruent graphs and the connectivity of graphs. American Journal of Mathematics, 54(1):150–168, 1932.
- [29] I. Kra and S.R. Simanca. On circulant matrices. Notices of the AMS, 59(3):368–377, 2012.
- [30] A. Nilli. On the second eigenvalue of a graph. Discrete Mathematics, 91:207–210, 1991.
- [31] D.J. Watts and S.H. Strogatz. Collective dynamics of small-world networks. Nature, 393:440–442, 1998.
- [32] R. Olfati-Saber. Ultrafast consensus in small-world networks. In Proceedings of the 2005 American Control Conference, pages 2371–2378, 2005.
- [33] R. Diestel. Graph Theory. Sringer, Berlin, 2005.