Efficient simulation of mixed boundary value problems and conformal mappings
Abstract.
In this paper, we present a stochastic method for the simulation of Laplace’s equation with a mixed boundary condition in planar domains that are polygonal or bounded by circular arcs. We call this method the Reflected Walk-on-Spheres algorithm. The method combines a traditional Walk-on-Spheres algorithm with use of reflections at the Neumann boundaries. We apply our algorithm to simulate numerical conformal mappings from certain quadrilaterals to the corresponding canonical domains, and to compute their conformal moduli. Finally, we give examples of the method on three dimensional polyhedral domains, and use it to simulate the heat flow on an L-shaped insulated polyhedron.
Key words and phrases:
Brownian motion; Monte Carlo methods; Walk on spheres; Harmonic measure; Conformal mappings; Conformal modulus; Numerical algorithm; Heat flow2020 Mathematics Subject Classification:
30-08; 30C20; 31-08; 31A15; 60J65; 65C05, 65E051. Introduction
Conformal mappings are functions that preserve angles (directions and magnitudes) between two smooth curves at their point of intersection. They play an essential role in classical complex analysis, admitting a convenient characterization that they have a non-vanishing complex derivative. It is further assumed that conformal mappings are one-to-one and onto. Conformal mappings play an important role in engineering mathematics, e.g., aerospace engineering, fluid dynamics, electronics, and geodesy [7, 11, 32, 34]. They have also been recently applied in topics such as computer graphics [6, 20] and brain mapping [35].
In this paper we consider the computation of conformal mappings from a bounded and simply-connected domain onto , which is called the canonical rectangle. The existence of such conformal mappings is guaranteed by Riemann’s mapping theorem. However, this result does not provide us with an explicit formula of the mapping, which can only be derived analytically for some special cases of .
The problem of finding numerical representations of Riemann mappings is classical. Popular methods include the Schwarz–Christoffel method [8], discrete Ricci flow [12], Wegmann’s method [36, p. 405], and circle packing [33]. The conjugate function method used as the basis of our investigation was first introduced in [13]. A version of this algorithm for multiply connected domains was developed in [14]. It should be noted that the -FEM implementation of the conjugate function method in [13] works also with unbounded planar domains [16] and ones with strong singularities [17].
We propose a new stochastic algorithm for numerical approximation of a conformal mapping of a domain onto the canonical rectangle. This approach requires solving a Dirichlet–Neumann mixed boundary value problem on the domain. For this purpose, a variant of the Walk-on-Spheres (WoS) algorithm is used. This is a Monte Carlo method specifically designed for efficient simulation of Dirichlet type boundary value problems. Our algorithm is thus modified for solving the mixed boundary value problem. The algorithm is modified to make use of Schwarz’ reflections at the Neumann boundary. We will explain this idea in detail in Section 5. To our knowledge, this is the first time attempt to develop a stochastic algorithm for numerical conformal mappings. For a survey of other currently available methods see e.g. [22, pp. 8–11]. Recently, there has been substantial work on boundary integral methods for computing numerical conformal mappings [28] as well as closely related problems of conformal modulus of a quadrilateral [29] and condenser capacity [30].
This paper is organized as follows. We will first present the fundamental concepts required for understanding our approach in Section 2, followed by a detailed explanations of the conjugate function method in Section 3. The theory behind the Walk-on-Sphere method is discussed in Section 4, and its variant, a reflected Walk-on-Spheres method, is introduced in Section 5. In Section 6, we give several simulation examples of numerical conformal mappings using this method, and finally discuss generalization of this approach to the three dimensional setting in Section 6.4.
2. Preliminaries
In this section, we discuss conformal modulus of a quadrilateral, which is a concept originating from geometric function theory (see e.g. [3]). First recall the Riemann mapping theorem:
Theorem 2.1 (Riemann Mapping Theorem).
Let be the unit disk. For a simply connected domain in the plane, with a boundary containing more than one point, there exists a conformal mapping , which is unique up to a Möbius transformation in .
The group of Möbius transformations that map the unit disk onto itself are called Möbius automorphisms of the unit disk, and denoted by . The general form of a transformation in this group is given by:
where:
-
•
is a complex number with ,
-
•
is a real number representing the angle of rotation,
-
•
is a complex exponential indicating a rotation,
-
•
is the complex conjugate of .
It should be noted that while a conformal mapping is only defined at the interior points of the domain, by the Carathéodory extension theorem (see e.g. [21, Theorem 5.1.1]), a mapping between Jordan domains admits a homeomorphic extension to the boundary. This leads to a natural question known as the Grötzsch problem. In fact, it is known that fixing images of three distinct boundary points is sufficient to make a conformal mapping between two Jordan domains unique.
Let be a Jordan domain in the complex plane , and let be four distinct positively oriented points on the boundary . We call such domain together with the selected boundary points a (generalized) quadrilateral, and denote it by .
The above considerations motivate the following definition [31, p. 54, Definition 2.1.3]:
Definition 2.1 (Conformal modulus of a quadrilateral).
If there exists a conformal mapping which transforms a quadrilateral onto a rectangle so that the boundary points are mapped onto the vertices , respectively, we call this number the (conformal) modulus of the quadrilateral , and denote it by
| (1) |
In view of the above we note that the modulus is a unique characteristic that determines the conformal equivalence class of the quadrilateral.
We denote by the so-called conjugate quadrilateral of . From the elementary properties of conformal moduli, one may observe the following basic identity (see e.g. [3, p. 15]):
Lemma 2.2 (Reciprocal identity).
Let and . Then
| (2) |
This principle plays an important role in the study of geometric properties of quadrilaterals in the complex plane, as detailed in [24, p. 15] and [31, pp. 53–54].
2.1. Conformal moduli and Dirichlet–Neumann mixed boundary value problems
Recall that the modulus of a quadrilateral is closely related to a the Dirichlet–Neumann mixed boundary value problem(Dirichlet–Neumann problem, in short) of Laplace equation, see e.g. [18, p. 431].
Definition 2.2 (Dirichlet–Neumann problem in general).
Consider a domain where its boundary is a regular Jordan curve. The exterior unit normal is defined at almost every boundary point. Suppose that , and are composed of disjoint sets of regular Jordan arcs, intersecting at a finite number of points. Define and as continuous real-valued functions on and , respectively. Let denote differentiation to the direction of the exterior normal. The goal is to find a function such that:
-
(1)
is continuous in and differentiable in .
-
(2)
For every point , .
-
(3)
For each , the normal derivative .
For quadrilateral , we consider the boundary segments , for , as the parts of connecting to , to , to , and back to , respectively. Let , and be the (unique) harmonic solution to the Dirichlet–Neumann mixed boundary value problem:
| (3) |
3. Conjugate Function Method
Suppose that is a quadrilateral, and is the harmonic solution to the Dirichlet–Neumann problem (3). Let be the harmonic conjugate of , normalized by the condition . Then the analytic function maps conformally onto the rectangle , so that vertices are mapped onto , , , and . See [13].

Now we may observe that the canonical conformal mapping of a quadrilateral onto the rectangle with vertices at , , , and , can be obtained from solving the corresponding Dirichlet–Neumann problem and its conjugate problem. The following lemma (see [13, Lemma 2.3]) shows how to construct the conjugate harmonic function .
Lemma 3.1.
Let be a quadrilateral with modulus , and suppose solves the Dirichlet–Neumann problem (3). If is a harmonic function conjugate to , satisfying , and represents the harmonic solution for the conjugate quadrilateral , then .
In particular, if and are known, we may derive the value of the modulus through the Cauchy–Riemann equations. Once is known, we get the conformal mapping. The conjugate function method for constructing a conformal mapping is as follows:
Steps for Finding Conformal Mapping
-
(1)
Find the solution to the Dirichlet–Neumann problem (3).
-
(2)
Find the solution to the Dirichlet–Neumann problem associated with .
-
(3)
Pick a suitable point inside the domain (usually near the center of the domain) and evaluate suitable pairs of partial derivatives and , where . If is a conformal mapping, it satisfies the Cauchy–Riemann equations. Therefore we can compute as
The vertices are mapped onto the corners .
The partial derivatives of and can be estimated using the five-point formula [1, p. 883] :
The error term for this approximation depends on the fourth derivative of and is given by:
where is a point in the interval .
4. Theory behind the WoS method
The Walk-on-Spheres (WoS) method is a Monte Carlo algorithm used for solving the Dirichlet problem for the Laplace equation.
In this section, we first introduce the Brownian motion and state its invariance with respect to conformal mappings. Then we show the relation between Dirichlet–Neumann boundary value problems and Brownian motions, which is the foundation for our Reflected Walk-on-Spheres method.
4.1. Brownian motion
Definition 4.1.
A one-dimensional Brownian motion is a stochastic process characterized by:
-
(1)
The starting condition for a given real number .
-
(2)
Independence of increments: For any non-overlapping intervals and , the increments and are independent.
-
(3)
For each time interval , the increment is normally distributed with a mean of 0 and a variance of .
-
(4)
Continuity in probability: The path is continuous with probability 1.
The case where defines the standard Brownian motion.
A multi-dimensional Brownian motion in dimensions, denoted as , consists of independent one-dimensional Brownian motions. In particular, the complex Brownian motion is , where and are two independent real Brownian motions.
Recall the following definition of the harmonic measure. For details we refer to [10, Chapter I].
Definition 4.2 (Harmonic measure).
For the upper half-plane and a point , the harmonic measure of a set on the real line at the point is defined as:
| (5) |
where is a finite union of open intervals on the real line, and each is given by:
Here, are the intervals so that is their union, and arg is the argument of a complex number.
The harmonic measure has the following properties:
-
(i)
It is always between 0 and 1 for .
-
(ii)
It approaches 1 as approaches .
-
(iii)
It approaches 0 as approaches the complement of in the extended real line.
This measure is uniquely determined and is actually the unique harmonic function that satisfies the above properties. Its uniqueness is a consequence of Lindelöf’s maximum principle.
For the unit disk , let be a finite union of open arcs on . The harmonic measure of at in is defined to be
| (6) |
where is any conformal mapping from onto such that is the real line. This harmonic function also satisfies the three conditions similar to (i), (ii), and (iii). In addition by Lindelöf’s maximum principle this definition is independent of how is chosen. Moreover, by changing the variable we get
| (7) |
Let be a simply connected domain and is a Jordan curve. Let be a conformal mapping from the unit disk onto , is a point in and . For any Borel set the harmonic measure of with respect to in is defined as:
| (8) |
Remark 4.1.
The harmonic measure in (8) does not depend on the choice of . If there is another function that maps onto , then by Riemann mapping theorem, and differ only by a Möbius automorphism of , i.e. . Therefore by (6),
| (9) |
because is a conformal mapping.
Furthermore, if we choose the conformal mapping from to such that for , the harmonic measure of at in becomes
| (10) |
where denotes the Euclidean length of an arc on the unit circle.
In this case the interpretation of harmonic measure becomes closely tied to probability theory. Specifically, it represents the probability that a Brownian motion starting from the origin, exits the disk through the set . Due to the symmetry of the disk, this probability is uniform and is equal to . This illustrates the probabilistic interpretation of the harmonic measure.
4.2. Conformal invariance of the Brownian motion and the harmonic measure
Brownian motion in the plane, or the complex Brownian motion, exhibits a conformal invariance, see e.g. [23, Theorem 2.2]. Indeed, let be a conformal mapping from domain onto . If is a complex Brownian motion on then admits the representation
where is another complex Brownian motion. Thus the image trajectory of a Brownian motion under conformal mapping is still a trajectory of Brownian motion.
Thus if we choose the conformal mapping from to such that , when a Brownian particle starting at that point in exits the domain through , we would observe in that the Brownian particle starting at 0 and exits the domain through . So we can conclude the probability of hitting is precisely the harmonic measure . More generally speaking, the probability of the Brownian motion hitting a particular part of the boundary in the conformally transformed domain is the same as in the original domain [23].
The next definition introduces a powerful function for dealing with reflection at Neumann boundaries in RWoS algorithm.
Definition 4.3 (Anti-conformal Mapping).
An anti-conformal mapping is a continuous function from a neighborhood of in the complex -plane to a neighborhood of in the complex -plane. It preserves angles but reverses orientation.
The reversal of orientation in anti-conformal mappings changes the trajectories of the Brownian paths by mirroring them. Consequently, a Brownian trajectory remains a Brownian trajectory under anti-conformal maps.
Proposition 4.1.
The trajectory of a Brownian motion under an anti-conformal map is again a trajectory of a Brownian motion in the image domain. The same holds for the harmonic measure. Indeed, for any subset and anti-conformal mapping .
4.3. Connection between Dirichlet–Neumann boundary value problems and Brownian motion
The connection between Dirichlet boundary value problems and Brownian motion is due to Kakutani in 1944 [19]. Kakutani showed that the solution to the Dirichlet problem can be represented in terms of Brownian motion. Specifically, if a Brownian motion starts from a point inside , the value of the harmonic function at that point is the expected value of the dirichlet boundary function evaluated at the point where the Brownian motion first exits the domain . Indeed, if is a Brownian motion starting at point inside , and is the first exit time from , then the solution to the Dirichlet problem is given by:
Here, is the expected value of at the exit point of the Brownian motion from starting from .
In the plane, the Kakutani connection has been extended for the Dirichlet–Neumann problem, see e.g. Sylvain Maire and Etienne Tanré [25]. When the normal derivative at the Neumann Boundary is zero, the stochastic representation is simplified enough to simulate through WoS method. In this case, Brownian motion is reflected about the normal line at the point where it hits the Neumann boundary (a process known as specular reflection). Following this reflection, the (reflected) Brownian motion is halted at the first time it hits the Dirichlet boundary. For the proof, we refer to [25].
Proposition 4.2 (Stochastic Representation).
Let be a bounded domain in with a regular boundary where and are both unions of regular Jordan arcs such that is finite. If and is a continuous function on . Then, For a point in , the harmonic solution to the Dirichlet–Neumann problem is given by , where is a -dimensional Brownian motion, the expected value is taken conditionally on , and is the first exit time from , which is also the first-hitting time of . When the particle touches the Neumann boundary , it is reflected symmetrically back into the domain.
The Dirichlet–Neumann problem in (3) is the case when , , on and on .
To approximate a solution to the Dirichlet–Neumann problem using Brownian motion, one can simulate multiple independent Brownian paths starting from a point inside the domain. By the Law of Large Numbers, the average value of a function evaluated at the exit points of these paths will converge to the expected value, providing an approximation of the solution. Mathematically, this is expressed as:
where is the number of simulated paths, and is the exit point of the -th path.
5. Reflected Walk-On-Spheres Algorithm
An obvious method for simulating Brownian motion involve discretizing its path into small time intervals and computing the movement in each interval. This can be computationally intensive, especially for fine time scale discretizations. The WoS method, on the other hand, uses a different approach by jumping directly from one point to another within a sphere, significantly reducing the number of steps needed to simulate the Brownian path. The Walk-on-Spheres (WoS) method [27] exploits the rotational invariance of Brownian motion: the exit point of a Brownian trajectory from a sphere is uniformly distributed over the sphere’s surface. The WoS method starts at an initial point in the domain and repeatedly draws the largest possible sphere within the domain, selecting the next point uniformly from the sphere’s surface until the boundary is hit. This process is repeated to build a sequence of points that simulate the Brownian motion on the spheres. Versions of WoS method for eigenvalue type equations have been investigated in [37, 38].
5.1. Sampling the Exit Point
The WoS algorithm samples the first exit point of a Brownian motion from a domain. Starting with , it iteratively draws the largest possible sphere within the domain and determines the exit point until the Brownian motion approaches the boundary. One may think the process converges to the boundary very fast. Yet, practically, the algorithm would require an infinite number of steps to stop [26] since the imaginary boundary has no thickness and the closer the Brownian particle is to the boundary, the smaller the radius of the sphere is. To address this in computational implementations, the process is halted as soon as it approaches close enough to the boundary, typically within an -shell, and the point of exit is projected onto the boundary. This approach is often referred to as the introduction of an -shell or -layer.

5.2. Reflection at Neumann Boundaries
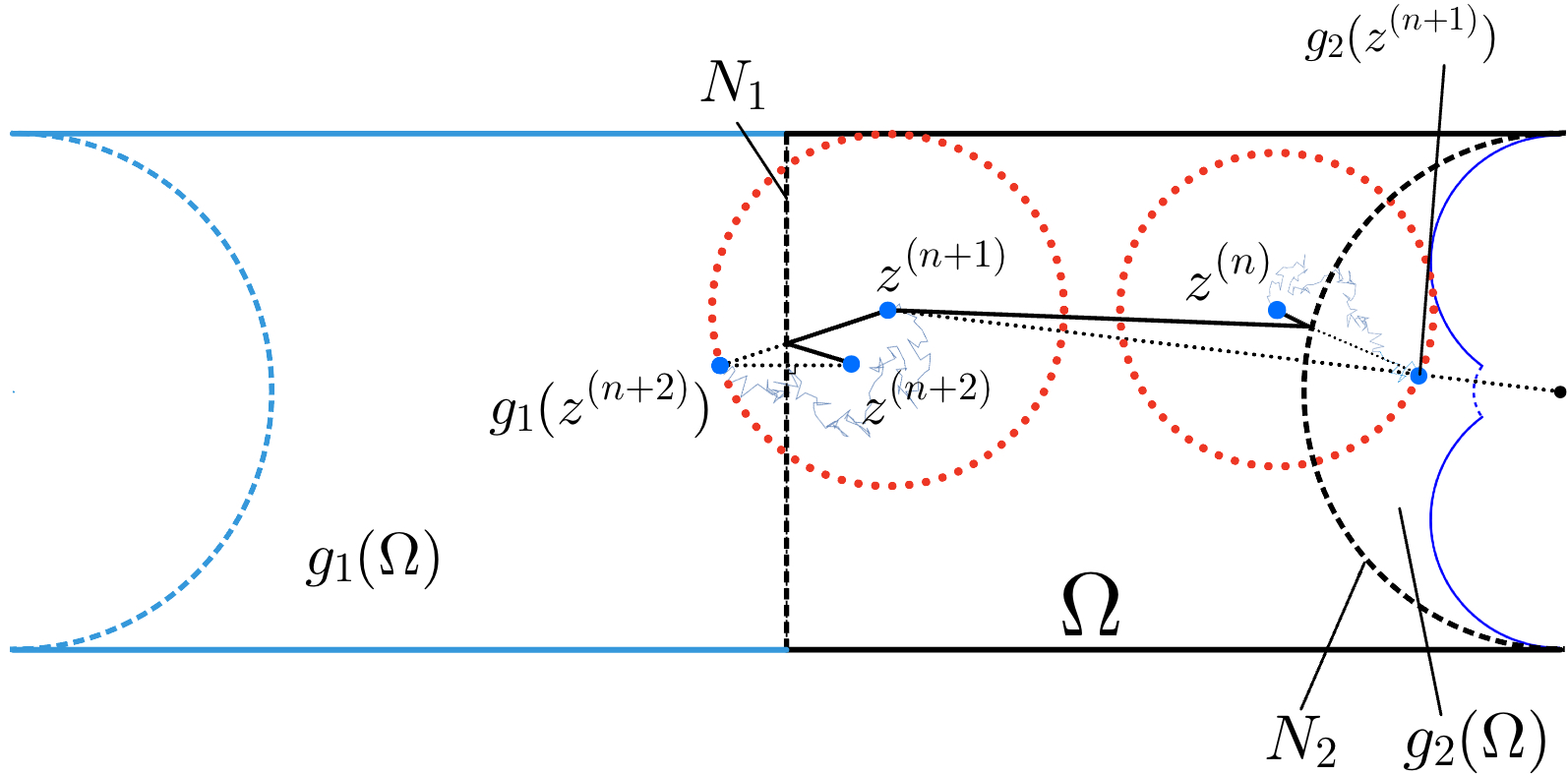
In the Dirichlet–Neumann problem the Brownian trajectory is absorbed in the Dirichlet boundary and reflected on the zero-valued Neumann boundary. The challenge in applying the WoS algorithm in solving the 2d Dirichlet–Neumann problem is to accurately reflect the Brownian motion at Neumann boundaries. One idea is that, when the particle is near the Neumann boundary, stop walking on spheres and use the primitive idea of simulating fine time mesh to compute the reflection angle about the normal lines. But this is not only very costly in computation, but also it brings in an error dependent on step size in the simulation. Therefore, the idea of fine time mesh to simulate reflection is not very desirable. Fortunately, for Neumann boundaries that are straight segments, we can think of them as mirrors and walk on spheres through the mirrors as if there is no barrier between our real world and the reflected imaginary world. As soon as the Brownian particle stepped into the reflected domain, we bring it back by reflecting it about the straight Neumann boundary, just as if it had bounced off the mirror (maybe more than once). In this way, we have walked on a sphere not bounded by the Neumann boundary. Although we don’t know the exact reflection process the particle went through, we have simulated the destination point at a macroscopic level. And then we set this destination point as the center for the next sphere walk.
Constructing the anti-conformal map for reflection over curved boundary
In addition of straight lines, we also consider curved Neumann boudaries. The reflection with respect to curved boundaries are handled by using anti-conformal mappings.
In the following is a curved Neumann boundary.
-
(1)
Find the conformal mapping that transform into a straight line segment .
-
(2)
Find the reflection function about the line segment .
-
(3)
Then the composition function is the desired anti-conformal mapping which mirrors into the reflected domain . Since only the set remains fixed in the reflection, it would be expected .
In addition, since
Therefore, .
The remaining question is how to find the conformal mapping from curved boundary to line segment. This is a difficult question and there is no general answer yet. However, this issue is mitigated for circular-arc boundaries for which we have the well-known Möbius transformations that can map circles into lines.
If we use the composition mentioned above, for circular-arc boundaries with radius centered at , the mapping
| (11) |
is the anti-conformal reflection. This mapping is an inversion in and hence preserves the class of generalized circles[5, Theorem 3.2.1]. Thus the reflections at circular-arc Neumann boundary are manageable.
Remark 5.1.
Note that the particle cannot be reflected somewhere outside the original domain . Also note that some line segments or circular arcs may adjoin each other to form a consecutive Neumann boundary. In this case it is necessary to break it into smaller tractable pieces. Therefore when calculating each radius of next walking sphere, we should set it to be the minimal distance between the current position and , where is the splitting points of the consecutively adjoining Neumann boundaries, is the anti-conformal mapping function for reflecting about the th Neumann boundary among all the Neumann boundaries . In this way, it ensures the Brownian trajectories stay in the original domain. In practice, the distance calculation can often be optimized by not considering some boundaries due to the intrinsic geometry of the original domain .
6. Examples
In this section, we give simulation examples and results to demonstrate our method is an effective one in numerically solving mixed boundary Laplace equations and constructing conformal mappings.
For the canonical mapping of quadrilaterals, we plot the equipotential curves of and . We also give the computed values of their moduli and compare them to the reference values. These examples have been computed using a straightforward implementation of the algorithm on C programming language. To compare these results with the deterministic -finite element method, the readers should refer to [15].
In addition to the 2d examples, we our RWoS method can be extended to solve Laplace equation in polyhedral domains with zero Neumann boundary conditions in the three-dimensional space. This kind of problems arises in engineering, e.g., heat transfer problems.
6.1. Rectangle
We first test our method on the simplest canonical domain, which is the rectangle . By Definition 2.1, the modulus of the normalized rectangle is its height .


| Height(Modulus) h | Computed value | Error |
|---|---|---|
| 0.600000 | 0.600292 | |
| 0.800000 | 0.799714 | |
| 1.000000 | 1.000458 | |
| 1.200000 | 1.200488 | |
| 1.400000 | 1.400667 |

6.2. L-shaped region
The L-shaped region
is commonly used in various computational analyses. It has been explored by Gaier [9], who provided computed moduli values for such domains. We compare our results with his.


| Nodes | Reference [15] | Computed value | Error |
|---|---|---|---|
| 1.508154 | 1.508108 | ||
| 0.663062 | 0.663150 |

6.3. Circular-arc quadrilaterals
Given four distinct points in the complex plane , the cross-ratio is defined by the expression:
| (12) |
An important property of the cross-ratio is its invariance under Möbius transformations. That is, if is a Möbius transformation, then the cross-ratio of the transformed points remains unchanged:
| (13) |
Type A. Consider a quadrilateral with sides formed by circular arcs from intersecting orthogonal circles, where angles are . Let and select points on the unit circle. The absolute value of the cross-ratio of these four points is
| (14) |
Define as the domain obtained from the unit disk by removing regions bounded by two orthogonal arcs with endpoints and respectively, forming the quadrilateral . By applying an appropriate Möbius transformation, we are able to conformally map the quadrilateral onto the upper semicircle of the annulus in the complex plane. The conformal modulus of the annulus is [9]. Therefore the modulus of the quadrilateral is precisely half that of the full annulus,
| (15) |
with:
The contours of the two potential functions are shown in Figure 8. The computed values of the moduli are in Table 3.



| Nodes | Reference [15] | Computed value | Error |
|---|---|---|---|
| (2, 10, 12) | 0.707150 | 0.708127 | |
| (2, 10, 14) | 0.807451 | 0.807155 | |
| (4, 12, 18) | 1.038325 | 1.038780 | |
| (6, 16, 24) | 1.170060 | 1.170932 | |
| (8, 22, 32) | 1.313262 | 1.313680 |
Type B. Consider the sides of the quadrilateral as circular arcs within the unit disk, where each internal angle is . Consequently, the unit disk, along with the boundary points , defines a quadrilateral, which we denote as . Again, by employing a proper Möbius transformation to map the unit disk onto the upper half-plane, we can conveniently express the modulus using the capacity of the Teichmüller ring domain [4, Section 7]. This is formulated as:
| (16) |
where is defined as in equation (14), and
Here, is defined in [15, Subsection 4.3]. The summarized results are presented in Table 4, The contours of an example are shown in Figure 10.



| Nodes | Reference [15] | Computed value | Error |
|---|---|---|---|
| (2, 10, 12) | 0.538971 | 0.538686 | |
| (2, 10, 14) | 0.595343 | 0.595158 | |
| (4, 12, 18) | 0.712162 | 0.712533 | |
| (6, 16, 24) | 0.771869 | 0.771132 | |
| (8, 22, 32) | 0.831900 | 0.831458 |
6.4. Three-dimensional examples
In higher dimensions, our method has particular appeal due to its relative simplicity when compared to alternative solutions. The reflected WoS algorithm extends naturally to 3D Dirichlet–Neumann domains, modeling insulated heat flow in thermodynamics. See Figures 12 and 13.


7. Discussion
While several methods for solving the potential functions required by the conjugate function method are known, and the main motivation of this paper was to test feasibility of using a Walk-on-Spheres algorithm for this purpose, this approach does have several distinct advantages. Potential advantages of the approach include the following.
Firstly, unlike finite element methods, it does not require a mesh or a parameterization of the underlying domain, just a simple representation of the boundary as a polygon or a circular arc polygon is needed. This is a significant advantage in the higher dimensions and in the cases where the domain has a complex geometry [17]. Our algorithm can take a full advantage of parallel computation, because the value of the function is simulated at each point independently of the others. In the planar case, it is suitable for computations on polygonal domains and circular arc polygons, latter of which is not easy to handle in some approaches. The algorithm is also expected to be suitable for unbounded domains (see [16]), although this needs further investigation.
Code and data availability
Open source C/Python source code for reproducing results in this paper, along with test results, can be downloaded from the page:
https://github.com/arasila/wos_conformal/.
Acknowledgments
The research was partly supported by NSF of China under the number 11971124, NSF of Guangdong Province under the numbers 2021A1515010326 and 2024A1515010467, and Li Ka Shing Foundation under the number 2024LKSFG06.
Authors wish tho thank Siqi Liu, a Guangdong Technion student, for her help in writing the Python code that was used in plotting the figures in this paper.
References
- [1] M. Abramowitz and I. A. Stegun, Handbook of mathematical functions with formulas, graphs, and mathematical tables, vol. No. 55 of National Bureau of Standards Applied Mathematics Series, U. S. Government Printing Office, Washington, DC, 1964. For sale by the Superintendent of Documents.
- [2] L. Ahlfors, Conformal Invariants: Topics in Geometric Function Theory, McGraw-Hill Book Co., 1973.
- [3] , Lectures on quasiconformal mappings, vol. 38 of University Lecture Series, American Mathematical Society, Providence, RI, second ed., 2006. With supplemental chapters by C. J. Earle, I. Kra, M. Shishikura and J. H. Hubbard.
- [4] G. Anderson, M. Vamanamurthy, and M. Vuorinen, Conformal invariants, inequalities, and quasiconformal maps, (1997).
- [5] A. F. Beardon, The Geometry of Discrete Groups, Graduate Texts in Mathematics, Springer New York, NY, 1 ed., 1983.
- [6] P. Bowers and M. Hurdal, Planar conformal mappings of piecewise flat surfaces, Visualization Math. III, (2003), pp. 3–34.
- [7] W. Calixto, B. Alvarenga, J. da Mota, L. da Cunha Brito, M. Wu, A. Alves, L. Neto, and C. Lemos Antunes, Electromagnetic problems solving by conformal mapping: A mathematical operator for optimization, Mathematical Problems in Engineering, 2010 (2011), p. e742039.
- [8] T. Driscoll and L. Trefethen, Schwarz-Christoffel mapping, vol. 8 of Cambridge Monographs on Applied and Computational Mathematics, Cambridge University Press, Cambridge, 2002.
- [9] D. Gaier, Conformal Modules and their Computation, World Scientific, River Edge, NJ, 1995, pp. 159–171.
- [10] J. Garnett and D. Marshall, Harmonic Measure, Cambridge University Press, 2005.
- [11] F. González-Matesanz and J. Malpica, Quasi-conformal mapping with genetic algorithms applied to coordinate transformations, Computers & Geosciences, 32 (2006), pp. 1432–1441.
- [12] X. Gu and S.-T. Yau, Computational conformal geometry, vol. 3 of Advanced Lectures in Mathematics (ALM), International Press, Somerville, MA; Higher Education Press, Beijing, 2008. With 1 CD-ROM (Windows, Macintosh and Linux).
- [13] H. Hakula, T. Quach, and A. Rasila, Conjugate function method for numerical conformal mappings, Journal of Computational and Applied Mathematics, 237 (2013), pp. 340–353.
- [14] H. Hakula, T. Quach, and A. Rasila, The conjugate function method and conformal mappings in multiply connected domains, SIAM J. Sci. Comput., 41 (2019), pp. A1753–A1776.
- [15] H. Hakula, A. Rasila, and M. Vuorinen, On moduli of rings and quadrilaterals: algorithms and experiments, SIAM J. Sci. Comput., 33 (2011), pp. 279–302.
- [16] , Computation of exterior moduli of quadrilaterals, Electron. Trans. Numer. Anal., 40 (2013), pp. 436–451.
- [17] , Conformal modulus and planar domains with strong singularities and cusps, Electron. Trans. Numer. Anal., 48 (2018), pp. 462–478.
- [18] P. Henrici, Applied and Computational Complex analysis. Vol. 3: Discrete Fourier Analysis—Cauchy Integrals—Construction of Conformal Maps—Univalent Functions, John Wiley & Sons, Inc., USA, 1986.
- [19] S. Kakutani, Two-dimensional brownian motion and harmonic functions, Proceedings of the Imperial Academy, 20 (1944), pp. 706–714.
- [20] L. Kharevych, B. Springborn, and P. Schröder, Discrete conformal mappings via circle patterns, ACM Trans. Graphics (TOG), 25 (2006), pp. 412–423.
- [21] S. Krantz, Geometric function theory: Explorations in Complex Analysis, Cornerstones, Birkhäuser Boston, Inc., Boston, MA, 2006.
- [22] P. Kythe, Handbook of conformal mappings and applications, CRC Press, Boca Raton, FL, 2019.
- [23] G. Lawler, Conformally invariant processes in the plane, vol. 114 of Mathematical Surveys and Monographs, 2005.
- [24] O. Lehto and K. Virtanen, Quasiconformal Mappings in the Plane, Springer, Berlin, 1973.
- [25] S. Maire and E. Tanré, Monte Carlo approximations of the Neumann problem, Monte Carlo Methods and Applications, 19 (2013), pp. 201–236.
- [26] M. Mascagni and C.-O. Hwang, -shell error analysis for ”walk on spheres” algorithms, Mathematics and Computers in Simulation, 63 (2003), pp. 93–104.
- [27] M. Muller, Some continuous Monte Carlo methods for the Dirichlet problem, Ann. Math. Statist., 27 (1956), pp. 569–589.
- [28] M. Nasser, Numerical conformal mapping via a boundary integral equation with the generalized Neumann kernel, SIAM J. Sci. Comput., 31 (2009), pp. 1695–1715.
- [29] M. Nasser, O. Rainio, A. Rasila, M. Vuorinen, T. Wallace, H. Yu, and X. Zhang, Polycircular domains, numerical conformal mappings, and moduli of quadrilaterals, Adv. Comput. Math., 48 (2022), pp. Paper No. 58, 34.
- [30] M. Nasser and M. Vuorinen, Isoperimetric properties of condenser capacity, Journal of Mathematical Analysis and Applications, 499 (2021), p. 125050.
- [31] N. Papamichael and N. Stylianopoulos, Numerical Conformal Mapping: Domain Decomposition and the Mapping of Quadrilaterals, World Scientific Publishing Company, 2010.
- [32] R. Schinzinger and P. Laura, Conformal Mapping: Methods and Applications, Dover Publications, Inc., Mineola, NY, revised edition ed., 2003. Revised edition of the 1991 original.
- [33] K. Stephenson, Introduction to Circle Packing: The Theory of Discrete Analytic Functions, Cambridge University Press, Cambridge, 2005.
- [34] M. Vermeer and A. Rasila, Map of the World; An Introduction to Mathematical Geodesy, CRC Press, Boca Raton, FL, 2020.
- [35] Y. Wang, X. Yin, J. Zhang, X. Gu, T. Chan, P. M. Thompson, and S.-T. Yau, Brain mapping with the Ricci flow conformal parameterization and multivariate statistics on deformation tensors, in 2nd MICCAI Workshop on Mathematical Foundations of Computational Anatomy, 2008, pp. 36–47.
- [36] R. Wegmann, Chapter 9 - methods for numerical conformal mapping, in Geometric Function Theory, R. Kühnau, ed., vol. 2 of Handbook of Complex Analysis, North-Holland, 2005, pp. 351–477.
- [37] X. Yang, A. Rasila, and T. Sottinen, Walk on spheres algorithm for Helmholtz and Yukawa equations via Duffin correspondence, Methodol. Comput. Appl. Probab., 19 (2017), pp. 589–602.
- [38] , Efficient simulation of the Schrödinger equation with a piecewise constant positive potential, Math. Comput. Simulation, 166 (2019), pp. 315–323.