Double-Phase-Shifter Based Hybrid Beamforming for mmWave DFRC in the Presence of Extended Target and Clutters
Abstract
In millimeter-wave (mmWave) dual-function radar-communication (DFRC) systems, hybrid beamforming (HBF) is recognized as a promising technique utilizing a limited number of radio frequency chains. In this work, in the presence of extended target and clutters, a HBF design based on the subarray connection architecture is proposed for a multiple-input multiple-output (MIMO) DFRC system. In this HBF, the double-phase-shifter (DPS) structure is embedded to further increase the design flexibility. We derive the communication spectral efficiency (SE) and radar signal-to-interference-plus-noise-ratio (SINR) with respect to the transmit HBF and radar receiver, and formulate the HBF design problem as the SE maximization subjecting to the radar SINR and power constraints. To solve the formulated nonconvex problem, the joinT Hybrid bEamforming and Radar rEceiver OptimizatioN (THEREON) is proposed, in which the radar receiver is optimized via the generalized eigenvalue decomposition, and the transmit HBF is updated with low complexity in a parallel manner using the consensus alternating direction method of multipliers (consensus-ADMM). Furthermore, we extend the proposed method to the multi-user multiple-input single-output (MU-MISO) scenario. Numerical simulations demonstrate the efficacy of the proposed algorithm and show that the solution provides a good trade-off between number of phase shifters and performance gain of the DPS HBF.
Index Terms:
Dual-function radar-communication (DFRC), hybrid beamforming (HBF), double-phase-shifter (DPS), extended target, consensus-ADMM.I Introduction
Future 6th Generation (6G) mobile communication systems are expected to possess a sensing capability to enable various connected service applications[2], such as unmanned aerial vehicles (UAVs) and intelligent automobiles [3]. Such applications require larger amounts of spectrum, which makes it unaffordable to assign independent bands to the radio-frequency (RF) systems. Therefore, integrated sensing and communications (ISAC), as a technology with improved spectrum efficiency, lower power consumption and reduced cost, will play a crucial role in 6G and beyond [4].
The approaches to ISAC so far can be roughly categorized into two groups, namely, co-existence and dual function of radar and communication. For the group of the co-existence of radar and communication [5, 6], the two systems operate with independent transmitters sharing the same frequency band. Although this approach also improves the spectral efficiency, it could suffer from the inevitable mutual interference between radar and communication, which is in fact the key research issue in the related literature. The straightforward way is to design a spectrally compatible waveform (SCW) [7, 8, 9, 10, 11, 12]. Such approaches require to sense the spectrum occupied by the communication, and design radar waveforms with desired spectrum nulls to avoid imposing interference produced by radar on the communication. Although the SCW can be implemented to guarantee the co-existence, it does not really achieve the communication and radar spectrum sharing (CRSS) in a true sense given that the radars only operate at the frequency bands which are unoccupied by communications. Therefore, many co-design methods [13, 14, 15, 16, 17, 18, 19] were proposed to overcome the limitations of the SCW methods. The pioneering work on the co-design for the co-existence of radar and communication was proposed in [14], where a co-design of communication covariance matrix and radar sub-sampling matrix is proposed to minimize the interference caused to radar keeping the constraints of power and capacity for achieving the co-existence of matrix completion multiple-input multiple-output (MC-MIMO) radar and MIMO communication system. Moreover, the authors considered the joint design of radar waveform and communication precoding matrix for the co-existence scenario under the signal-dependent clutter environment in [15]. In addition, the co-existence of a communication system and pulsed radar and in the presence of signal-dependent interference was considered in [18], where the radar pulse codes and communication precoding matrix are jointly optimized to maximize the compound rate while guaranteeing the constraints of power and radar signal-to-interference-plus-noise-ratio (SINR).
In contrast to the studies on the co-existence, the second group aims to build a dual-function radar-communication (DFRC) system [20], where the communication and radar sensing functions are integrated into one platform and thereby allows a dual-function waveform to achieve both sensing and communication simultaneously. Such DFRC systems transmit dual-function waveforms by considering both radar and communication performance metrics jointly, and have gained a growing attention recently [21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31]. For example, as a simple way to achieve DFRC, the beampattern of a MIMO radar is optimized to implement traditional communication modulations, such as phase shift keying (PSK) and amplitude shift keying (ASK), by controlling sidelobe level of MIMO radar beampattern [24, 26]. In addition to these single-carrier methods, the orthogonal frequency division multiplexing (OFDM) signal is regarded as a promising candidate for the DFRC waveform [32]. In [33], the OFDM-based method employs the fast Fourier transform (FFT) and the inverse FFT (IFFT) to obtain the Doppler and range parameters, respectively. Besides, [34] designed a time-frequency waveform for an OFDM DFRC system which communicates with an OFDM receiver while estimating target parameters simultaneously. Apart from these, in [30], the authors proposed several beamforming designs to implement a joint MIMO radar transmission and MU-MIMO communication by shaping a desired radar beampattern while keeping the downlink SINR and power requirements.
However, the existing methods developed for the DFRC system implicitly assume a fully-digital architecture, in which an independent radio frequency (RF) chain is associated with each antenna including a mixer and a digital-to-analog converter (DAC) or analog-to-digital converter (ADC). This architecture might lead to extremely high hardware costs and power consumption, especially for large-scale millimeter-wave (mmWave) systems. As a result, the hybrid beamforming (HBF) architecture is viewed as a practical solution to the DFRC system. Specifically, in the HBF structure, a small number of RF chains are needed to ensure the satisfactory performance and large number of RF phase shifters (PSs) are adopted to reduce the cost. For communication-only systems, the HBF has been fully developed for both single-user (SU) and multi-user (MU) scenarios [35, 36, 37, 38, 39, 40, 41, 42], but it has been less studied for DFRC systems. In fact, HBF has been proposed for DFRC systems for the first time in [43], where the HBF is optimized to approach the the performance of ideal digital beamformer by considering the weighted summation of the radar and communication beamforming errors. However, the work in [43] is based on the ”two-stage” approach, i.e., the ideal digital radar and communication beamformers are firstly obtained, the HBF is then optimized according to the ideal digital beamformers. This indirect design procedure may not guarantee a satisfactory performance or exploit the systems full potential. Towards that end, the DFRC HBF with subarray-connection structure is considered in [44], where the HBF is designed to maximize the sum-rate subject to power and HBF constraints.
In terms of system model, the above two works do not consider the signal-dependent interference (such as clutters) environment, which is usually considered as the main challenge for sensing the target in radar applications [10, 45]. Moreover, for large-size target and clutter, their echoes become extended over range cells [46, 47, 48]. Different from the point-like target scenario, in the presence of extended target and clutters, the design requires some prior knowledge of the target and clutters, such as their impulse response or their statistics. Consequently, the model of the extended target and clutters is more complicated. To the best of our knowledge, the HBF design has not been investigated for the DFRC system in environments with extended target and clutters in the literature. In addition, the conventional single-phase-shifter (SPS) structure reduces the hardware cost of a mmWave system while bearing a performance loss. The DPS structure [49, 50, 51], where each antenna is connected to two in-parallel phase shifters, has been widely investigated in the communication field. For example, the authors in [49] propose zero-forcing (ZF) based heuristic algorithms to select antennas and optimize DPSs jointly. As a further step, a two-stage algorithm for designing DPS-based HBF is investigated in [51]. The corresponding results show that exploiting DPS can achieve a balanced trade-off between performance and cost. However, the above works focus on the communication-only systems, and the methods are difficult to extend to DFRC systems. Motivated by these facts, in this paper, we investigate the HBF design problem based on the DPS structure for the mmWave DFRC system in the presence of extended target and clutters. The main contributions of this work are summarized as follows:
-
•
We propose a novel hardware architecture for the analog beamforming component of the HBF based DFRC system, which adopts a DPS structure associated with each antenna. Compared with the conventional SPS structure, the DPS provides an extra degree of freedom (DoF) (i.e. amplitude control) of design. To adapt to the proposed HBF architecture, we derive the corresponding communication spectral efficiency (SE) and radar SINR as performance metrics and then formulate the DPS-based HBF design problem.
-
•
An algorithm termed joinT Hybrid bEamforming and Radar rEceiver OptimizatioN (THEREON) is proposed to solve the formulated nonconvex problem. For the radar receive filter, it is updated via the generalized eigenvalue decomposition. For the HBF design, the weighted minimum mean-square error (WMMSE) reformulation [52] is adopted first, and then we solve the corresponding problem based on the consensus alternating direction method of multipliers (consensus-ADMM) [53], in which the closed form solutions of the primal variables are derived via the Karush-Kuhn-Tucker (KKT) conditions. In addition, the proposed algorithm is adapted to the multi-user multiple-input single-output (MU-MISO) scenario.
-
•
Representative simulations are conducted to illustrate the efficacy of the proposed algorithm and the performance improvement enabled by the proposed DPS architecture. For different initialization, the algorithm consistently converges to a point with improved SE. We also demonstrate that the DPS structure can substantially improve the performance comparing to the conventional SPS structure at the cost of only an extra phase shifter for each transmit antenna.
The remainder of the paper is organized as follows. In Section II, the signal model and problem formulation are presented. The proposed algorithm is developed in Section III, and then extended to the MU-MISO scenario in Section IV. Section V presents various numerical simulations. Conclusions are drawn in Section VI.
Notation: Lower case and upper case bold face letters denote vectors and matrices, respectively. , and represent the conjugate, conjugate transpose and transpose operators, respectively. and denote the sets of -dimensional complex-valued vectors and complex-valued matrices, respectively. The real part of a complex-valued number and expectation operator are noted by and . is reserved for the trace of . denotes the identity matrix. and denote the Frobenius norm and the imaginary unit, respectively. Finally, and stand for the block diagonal matrix and the vector composed by the diagonal entries of a matrix, respectively.
II Signal Model and Problem Formulation
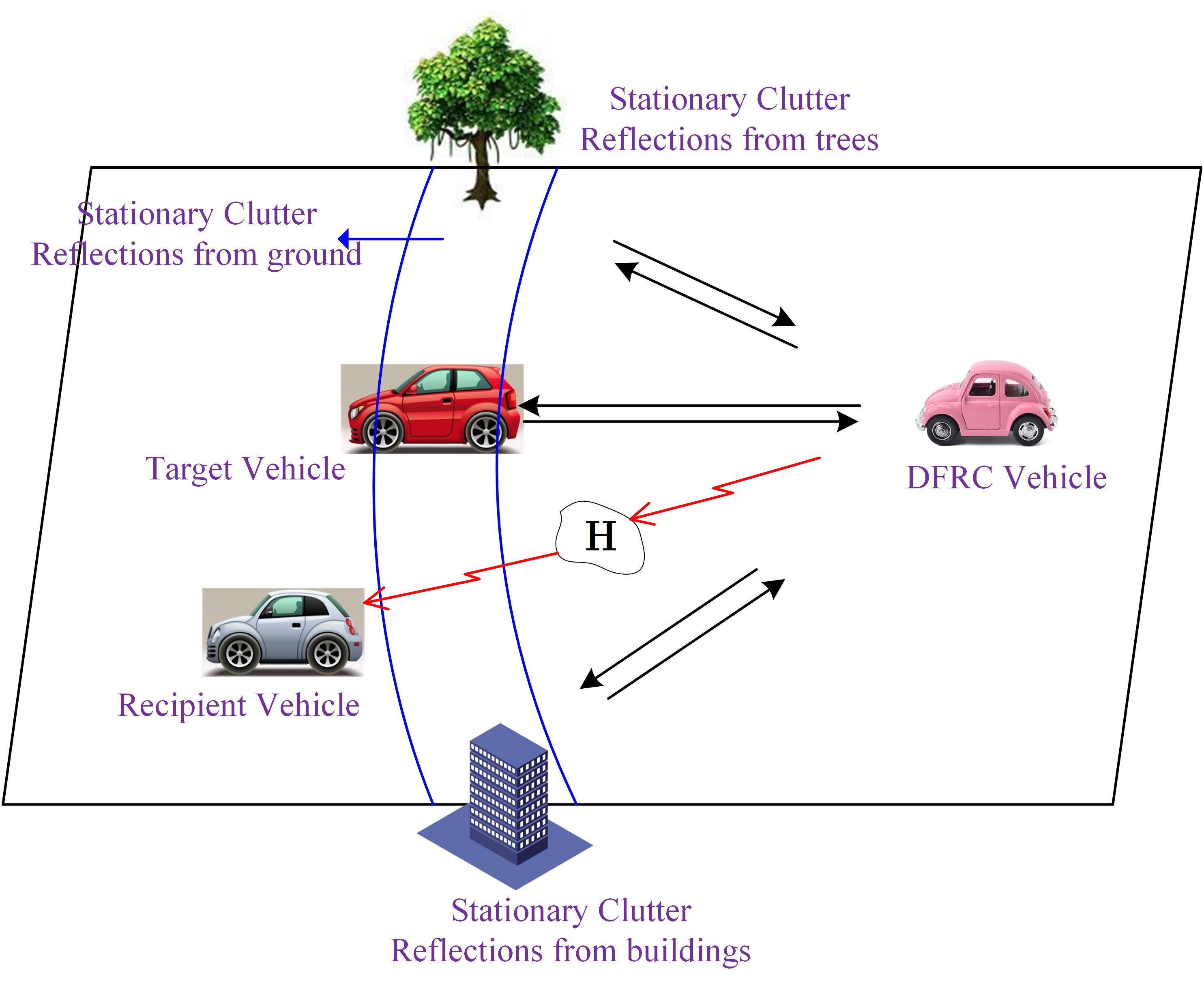
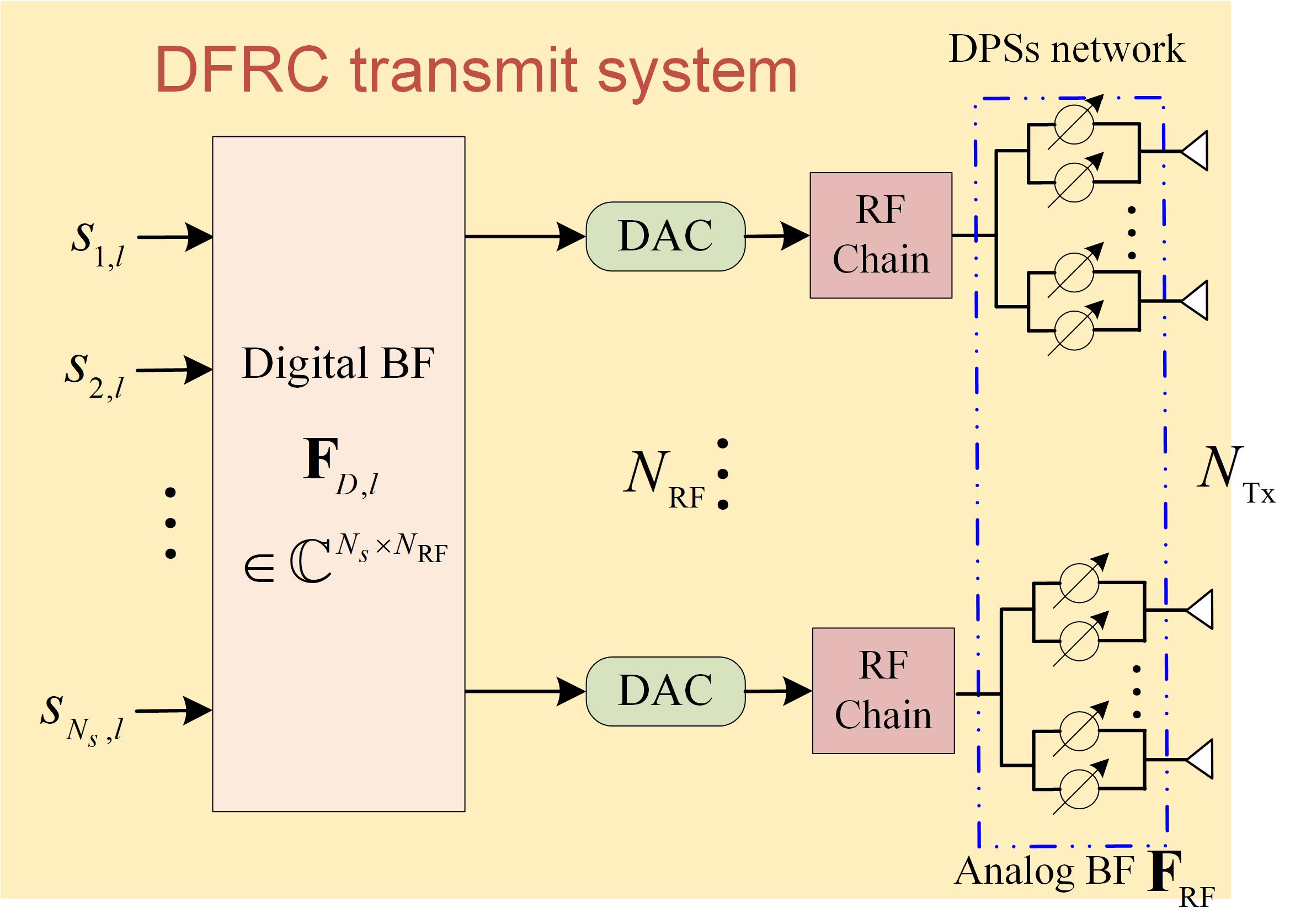
In this section, we formulate the system model and optimization problem for the proposed HBF DFRC system. We consider a scenario as shown in Fig. 1(a), where a DFRC vehicle sends communication symbols to a recipient vehicle receiver while detecting a target vehicle of interest in the presence of stationary clutters (such as trees, ground, buildings, etc.) simultaneously. The system architecture is depicted in Fig. 1(b), where we assume a time-division duplex (TDD) DFRC system with antennas and RF chains adopting a non-overlapping subarray architecture. Each subarray has antennas connected to a RF chain. The recipient vehicle receiver with antennas employs the fully-digital beamforming structure.
II-A Transmit Model
At the transmitter, the symbol block in -th subpulse111 We use the term subpluse and slot exchangeably in this paper, where the former is commonly used in radar and the later is used in communications. is precoded, at first, by a digital precoding matrix , where is the number of data streams. Subsequently, the baseband signal is up-converted to the RF domain via RF chains and processed by analog PSs. Different from the conventional subarray architecture where each antenna is connected to a single PS, we consider exploiting double PSs to provide additional amplitude control for the HBF, the diagram of which is sketched in Fig. 1(b).
Without loss of generality, each PS has a constant magnitude , and the synthesized value of each DPS module meets with and . Thus, the proposed analog precoder can be expressed as
| (1) |
where with , ,, , is a binary matrix indicating the antenna selection in a subarray.
Thus, the complex baseband discrete-time signal at the transmitter can be written as
| (2) |
where is the normalized symbol sequence corresponding to the -th subpulse with .
Assuming subpulses are contained in one pulse duration, and collecting all transmit vectors into a matrix , we have
| (3) |
II-B Communication Model
At the recipient vehicle receiver, the signal corresponding to the -th subpulse is modeled as
| (4) |
where is the channel state information (CSI) from the transmitter to the recipient vehicle and assumed to be known through some channel estimation techniques [14, 54, 55] such as pilot method. is additive Gaussian noise vector with zero mean and variance . It is assumed that the CSI between the transmitter and the recipient vehicle is modeled as a geometric channel with paths [38, 56]. Specifically, the channel matrix is written as
| (5) |
where is the complex factor of the -th path, and the angles of arrival and departure (AoAs/AoDs), are assumed to be uniformly distributed in . Besides, and are the array steering vectors and for uniform linear arrays (ULAs), they are defined by
| (6) |
| (7) |
where represents the carrier wavelength, and denote the antenna spacings at the receiver and transmitter, respectively.
The recipient vehicle adopts an digital combiner , to estimate the symbol block of the -th subpulse, then the estimated can be modeled as
| (8) |
For the communication function, we focus on the hybrid precoder design to maximize the SE, which is used to describe the bandwidth efficiency of communication systems. Concretely, the SE for the -th subpulse is defined as [38]
| (9) | ||||
where .
II-C Radar Model
For the radar function, we assume that the radar receive array with elements adopts full-digital beamforming structure, and consider a scenario where the radar receiver needs to detect the target vehicle of interest in the presence of clutter. In mmWave band, the scattering of target is extended in distance due to the high range resolution. To be more specific, let be the angle of a generic extended target and be the finite impulse response (FIR) of the extended target with being the support length of the FIR [47, 48]. Then, the received vector is modeled as
| (10) |
where is the spatial steering matrix with being the radar receive response vector similar to (6), is the Doppler shifts of the target with being the radial velocity of the target, is the sampling frequency, is a zero-mean Gaussian noise vector with variance , and is interference term from the stationary clutters. Assuming that the clutter is divided into clutter bins located at , then is expressed as
| (11) |
where is the spatial steering matrix of the -th clutter bin and denotes the FIR of the -th clutter bin with being the support length.
We define and and assume that both and are zero mean random vectors with covariance matrix being and , respectively222Here, we assume the covariance matrices of target and clutter are known. The assumption of the availability of this prior information can be obtained via a knowledge-based approach [57, 58].. Let being the receiver observation length. After defining and , the model can be written in the matrix form as follows:
| (12) |
where
and .
The received signal is filtered via the receive beamformer , then the output SINR333For target detection applications, the detection probability () of the target can be evaluated as [59], where is the Marcum Q function of order 1 and is the false alarm probability. Thereby, for a specified value , the maximization of is equivalent to the maximization of SINR. can be written as
| (13) | ||||
where . The following proposition will be used when designing the HBF and radar receive filter.
Proposition 1: The SINR in (13) can be equivalently expressed as
| (14a) | ||||
| (14b) | ||||
where , , , are defined in Appendix A, and .
Proof:
See Appendix A. ∎
II-D Problem Formulation
In this paper, we assume that the primary function of the DFRC system is to communicate with the recipient vehicle while providing the detection of the target vehicle as the secondary function. According to above models, a meaningful criterion of jointly optimizing the hybrid digital/analog precoder , communication combiner and radar receive filter is to maximize the communication SE while keeping the SINR requirement for radar target. Mathematically, our problem of interest can be formulated as
| (15a) | |||
| (15b) | |||
| (15c) | |||
| (15d) | |||
| (15e) | |||
where the constraint (15b) is the SINR requirement for the radar target with being the SINR threshold, the constraints (15c) and (15c) are feasible conditions for the DPS, and the constraint (15e) is total energy requirement for the DFRC system with being the total energy budget.
III Hybrid Beamforming Design With Double Phase shifters Architecture
In this section, we will solve the HBF design problem in the alternating optimization manner. Concretely, the radar receiver is optimized for a given , and in turn, are jointly optimized for a given . Since the subproblem with respect to has a consensus form, we propose an efficient algorithm by utilizing the consensus-ADMM [53].
III-A Optimization of radar receiver
Note that the objective function in (15) is independent to , and thus, we only need to find a feasible solution to meet the SINR requirement (15b). To this end, the radar filter can be determined by maximizing the SINR value as
| (16) |
of which the optimal solution can be achieved by taking the generalized eigenvalue decomposition (EVD) of , i.e.,
| (17) |
where the operator denotes the principal eigenvector.
III-B Optimization of hybrid beamformer and combiner
For a fixed , the subproblem with respect to is
| (18) | ||||
Since and are coupled in constraints (15b) and (15e), this subproblem is difficult to solve. By introducing auxiliary variables , we decouple and and recast problem (18) into
| (19a) | |||
| (19b) | |||
| (19c) | |||
| (19d) | |||
| (19e) | |||
where .
It is observed that the introduction of auxiliary variables results in decoupling , and in original objective function and imposing constraints (19b) and (19d) on and respectively. This will enable us to construct the ADMM subproblems with respect to problem (19), each of which can be solved with a closed form solution. Concretely, placing the equality constraints into the augmented Lagrangian function of (19) yields
| (20) |
where is defined as
| (21) | ||||
where are dual variables corresponding to the equalities and , respectively, and are the penalty parameters.
To fulfill the convergence requirements of the consensus- ADMM, we split the optimized primal variables into two blocks and . In what follows, we shall present the update procedures of the two primal blocks and dual block .
III-B1 Optimization of
For fixed and , is updated by solving
| (22) | ||||||
Nevertheless, It is still difficult to find the solution of (22) due to the nonconvex function . To solve problem (22), the following theorem is useful.
Theorem 1: Based on the WMMSE method[52], maximizing can be equivalently replaced by,
| (23) |
where is the weight matrix, and is the MSE matrix, given by
| (24) | ||||
Proof:
See Appendix B. ∎
By doing so, a coordinate descent (CD)-type algorithm is utilized to update the variables iteratively. Specifically, the update of is obtained by solving
| (25) |
According to (24), its optimal solution of can be attained via the first-order optimality condition given by
| (26) |
The update of is obtained by solving
| (27) |
which has the optimal solution given by
| (28) |
To proceed, the update of is obtained by solving
| (29) | ||||
The following theorem provides the solution to problem (29).
Theorem 2: The optimal solution to problem (29) can be found via the Karush-Kuhn-Tucker (KKT) conditions.
Proof:
See Appendix C. ∎
III-B2 Optimization of
For fixed and , is updated by solving
| (30) |
where , and . We note that the CD method is able to solve the problem (30). Specifically, the update of needs solving
| (31) | ||||
Similar to the solution to problem (29), the following theorem is useful to give the solution to problem (31).
Theorem 3: The optimal solution to problem (31) is obtain by analyzing the KKT conditions.
Proof:
See Appendix D. ∎
The variables are updated in parallel by solving
| (32) | ||||
whose closed-form solution is
| (33) | ||||
The variable is updated by the following problem:
| (34) |
Let and , problem (34) can be decomposed into
| (35) | ||||
whose closed-form solution is
| (36) |
and
| (37) |
After obtaining and , the phase values of phase shifters #1 and #2 in the DPS element are
| (38a) | ||||
| (38b) | ||||
III-B3 Optimization of
For fixed and , are updated by [53]:
| (39) | ||||
Finally, the proposed THEREON algorithm, which jointly optimize radar reciever and hybrid beamformer, is summarized in Algorithm 2.
III-C Complexity Analysis
We first analyze the computational complexity of the consensus-ADMM method for updating the hybrid beamformer and . Note that in each iteration of the proposed consensus-ADMM, the main computational complexity is caused by updating six variables, i.e. , , , , and . Updating and based on (26) and (28) need complexities of and , respectively. Updating needs computing using the bisection method with complexities of . Updating needs computing using the Newton method with complexities of , updating based on (33) needs a complexity of and updating based on (36) needs a complexity of . To summarize, the overall complexity of the consensus-ADMM is . While the complexity of the update of radar recceiver is . Overall, the complexity of the THEREON algorithm is .
IV Extension to Hybrid Beamforming Design for MU-MISO
In this section, we extend the proposed method in Sec. III to the hybrid beamforming design for a MU-MISO system in which a transmitter with antennas and RF chains serves non-cooperative single-antenna users.
In such a system, the transmitted signal at the -th subpulse is given by
| (40) |
where with being the intended data symbol for user at the subpulse . with . The received signal of the user at the -th subpulse is
| (41) |
where is the additive white Gaussian noise with variance of .
The SE for user in -th subpulse is defined as
| (42) |
where is the -th column of the matrix . Thus, the hybrid beamforming design problem is formulated as
| (43a) | |||
| (43b) | |||
| (43c) | |||
| (43d) | |||
| (43e) | |||
where the parameter represents the priority of the user .
Relative to (15), the problem of hybrid beamforming design for MU-MISO system has a major difference: For the MU-MISO scenario, there is multi-user interference (MUI) term in the spectral efficiency expression.
We note that the difference between problem (43) and (15) lies in the objective function while the constraint set is unchanged. Since the consensus-ADMM was used to avoid the coupling in the constraints, it can be used herein as well. Here we briefly describe the corresponding solving procedure. We first introduce to decouple and in problem (43). Based on the WMMSE framework, the objective function in (43) can be expressed as,
| (44) |
where is the positive weight for user at the subpulse , is the MSE error, given by
| (45) |
Similar to the solution procedure demonstrated in Section III, we provide the update solutions of and directly omitting the derivation details.
1) Calculate the receiver combining filter as
| (46) |
2) Calculate the weight as
| (47) |
3) Using (47) in (46), calculate the update of by solving
| (48) | ||||
whose closed form solution can be obtained similar to problem (29). By introducing a Lagrange multiplier , the first-order optimality condition of is
| (49) |
where and are defined as
| (50) |
and
| (51) | ||||
with is an dimensional vector whose -th entry is 1 and 0 otherwise. Then, the remaining procedure of the update of is the same as Equations (81) and (82).
V Numerical Simulations
This section provides various numerical simulations to examine the performance of the proposed hybrid beamforming design for the DFRC system. We first assess the performance of the hybrid beamforming design with the THEREON algorithm for SU-MIMO scenario. Then, the hybrid beamforming design for MU-MISO scenario is examined.
Unless otherwise mentioned, in all simulations, we assume a DFRC system with transmit antennas. The radar receive array with is considered. In simulations for the SU-MIMO case, the transmitter sends data symbols per subpulse to a user equipped with antennas. We assume an communication environment with clusters, and the noises at users are modelled as additive White Gaussian with with the covariances of .
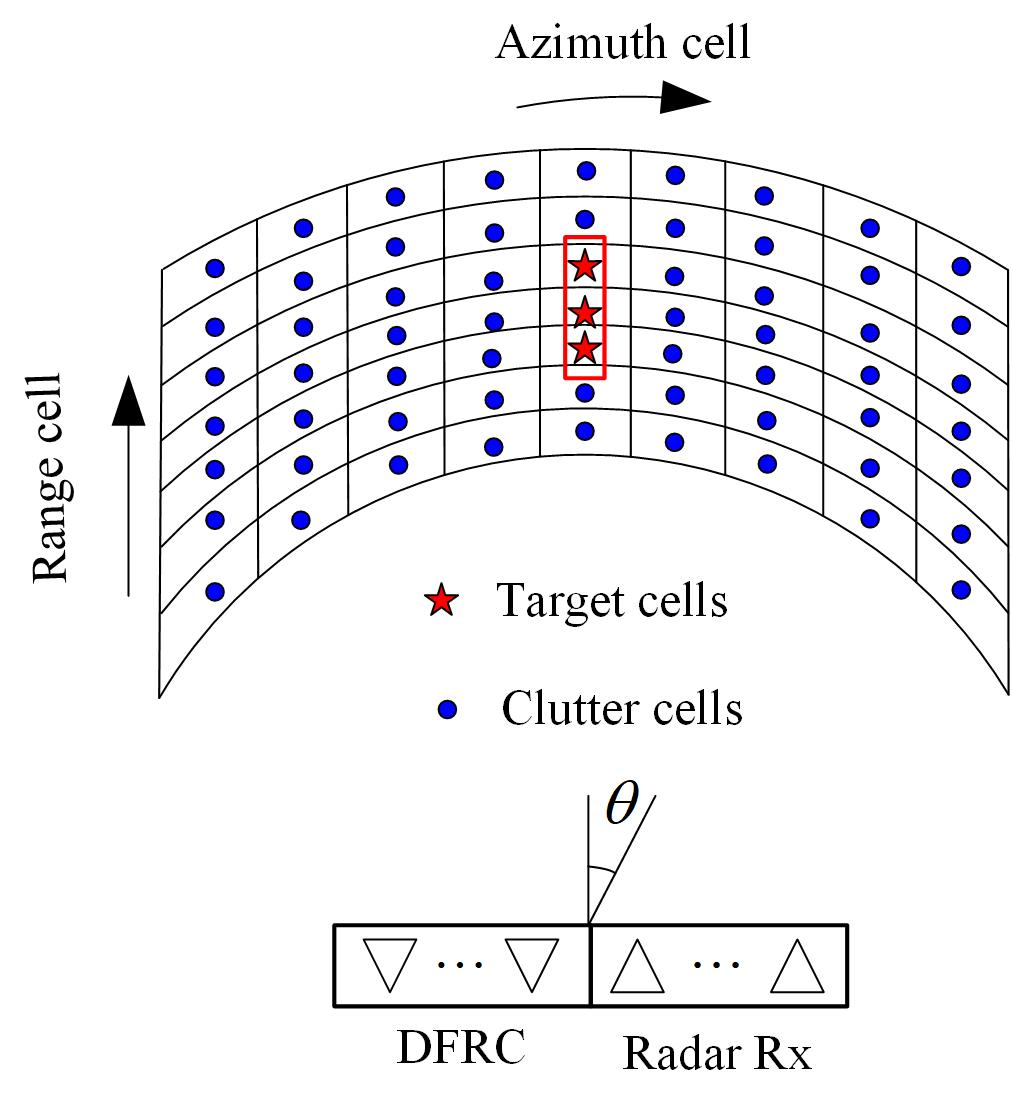
For radar scenario, we assume that the Tx/Rx arrays boresight directions are used as the reference for the azimuth , and that an extended target located at (as illustrated in Fig. 2). The number of subpulses in each pulse is , which is the case for in the recently published 5G NR standard [61]. In this case, each subframe contains slots, and the length of each slot is us. For modelling the impulse response of the extended target, we use the exponentially shaped covariance to model the target second-order statistic matrix , that is, with , and . For the signal-dependent interference (i.e., clutters), we consider a homogeneous clutter environment composed of azimuth cells, the azimuth angle of the -th cell is . All clutter second order statistic matrices are identically modeled as with with , and . As for the radar receive noise, we assume corruption by a white noise with the variance . Note that all numerical examples are analyzed using Matlab 2018b version and performed in a standard PC (with CPU Core i7 3.1 GHz and 16 GB RAM).
V-A Hybrid Beamforming Design for SU-MIMO Scenario
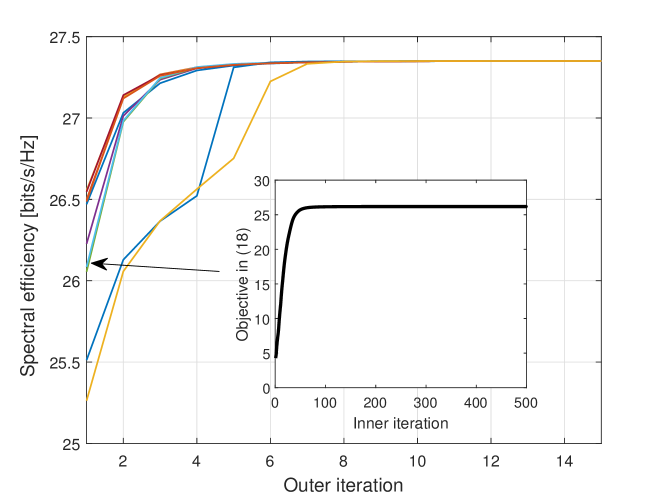
In the first example, we examine the convergence performance of the proposed algorithm THEREON for solving problem (15). We consider the DFRC system with RF chains and the total energy of the system is . The intended SINR requirement for the target is dB. We set the penalty parameters as . Fig. 3 analyzes the effect of 10 different initial points on the convergence performance of the proposed THEREON framework for solving problem (15). For each initial point, we assume the entries of initial are , where obeys the uniform distribution over and entries of initial obey . As shown in the figure, the converged objective values are the same for different initial points can converge to the same value as the outer iteration (i.e. firstly update the radar filter for given , and then update with aid of the consensus-ADMM for given ) goes on. In addition, for an instance of the THEREON framework, we also plot the convergence of the objective values of problem (19) versus the inner iteration number by using the consensus-ADMM algorithm. The result shows that the objective value obtained by the consensus-ADMM is able to converge to a sub-optimal value with the increasing iteration number.
The performance of the consensus-ADMM with respect to maximum, minimum and average computation times until the termination condition are reached for different numbers of RF chains is analyzed in Table I, where 100 Monto-Carlo trails are conducted. The results show that the proposed consensus-ADMM has a good computational efficiency.
| maximum time | minimum time | average time | |
|---|---|---|---|
| 2 | 1.14 | 1.35 | 1.28 |
| 4 | 1.89 | 2.25 | 2.03 |
| 8 | 2.83 | 3.46 | 3.11 |
| 12 | 3.14 | 3.67 | 3.34 |
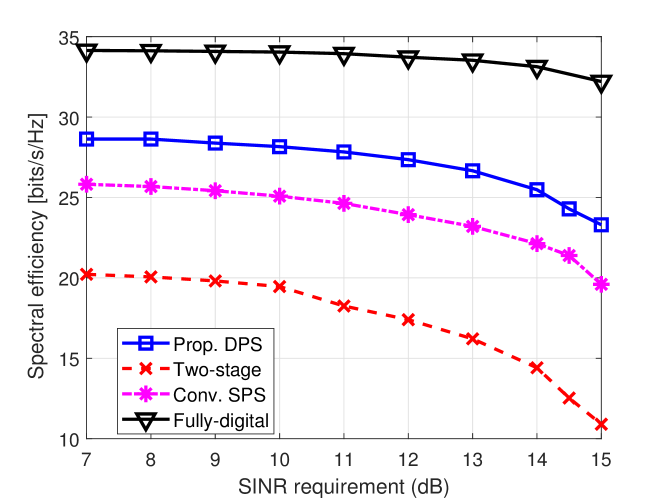
Next, we evaluate the performance of the proposed DPS hybrid beamforming design presented in Section IV for the SU-MIMO system. Fig. 4 plots the SE value under the proposed DPS (denoted by “Prop. DPS”) architecture versus the intended radar SINR requirement . For comparison purpose, the fully-digital beamformer (denoted by “fully-digital”) which provides the upper-bound SE, the two-stage method (denoted by “two-stage”) in [51, 36] and the conventional single phase shifter (SPS) architecture (denoted by “Conv. SPS”) are also considered. The results show that the obtained SE values decrease along with the , this is because when the intended is higher, the less degrees of freedom (DoFs) can be used to maximize the communication SE. Thus there is a trade-off between the radar SINR behavior and communication performance. In addition, Fig. 4 also shows that both the proposed DPS and conventional SPS structures with the consensus-ADMM achieve better SE values than the two-stage method in [51, 36] which seeks to minimize the distance of the optimal fully-digital beamformers. Moreover, the proposed DPS achieves a better performance consistently over different radar SINR requirements with the SE gap of about 3 bps/Hz in comparison with the conventional SPS.
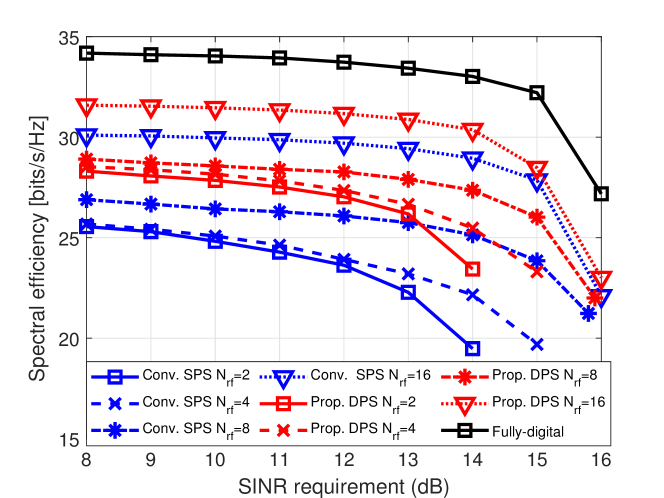
Fig. 5 displays the SE value versus the intended SINR requirement for different numbers of RF chains when considering and the total energy . For the case , the number of streams is considered to be 2. As expected, the larger the number of RF chains, the higher the achieved communication SE. Besides, we also note that as the increases, the gap between the proposed DPS and conventional SPS becomes smaller and smaller, and that the degradation trend of the SE becomes larger and larger as the increases. Furthermore, Fig. 5 shows that when the increases, achieving the radar SINR tends to be easier. This is because if the is larger, the larger the degrees of freedom (DoFs) in the optimization design can be used to suppress clutter, resulting the better radar SINR. This phenomenon agrees with our expectation.
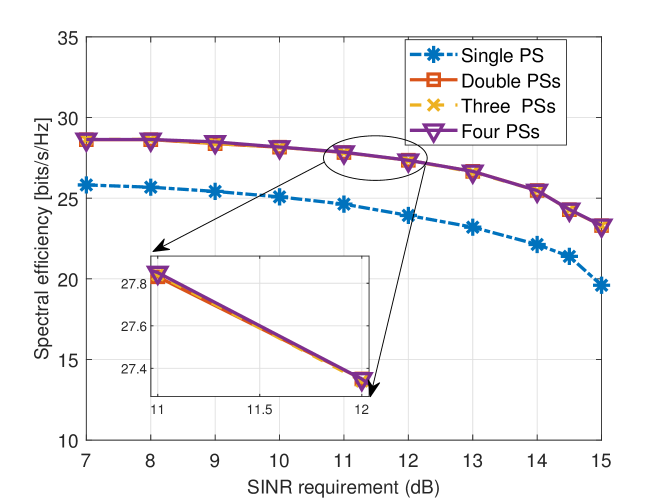
Finally, we investigate the influence of adding more phase shifters into each DPS structure when the total HBF power budget is fixed. As shown in Fig. 6, there are two points we can see clearly: (1) Comparing to the single PS case, the other cases have the extra performance gain around dB constantly at different radar SINR level. (2) For all the PS structures with 2, 3, and 4 PS’s, the corresponding curves are close to each other, where the differences are probably caused by the numerical accuracy. This indicates that, for a fixed power budget, the DPS structure is already capable to fully exploit the amplitude controlling in terms of improving the system performance.
V-B Hybrid Beamforming Design for MU-MISO Scenario
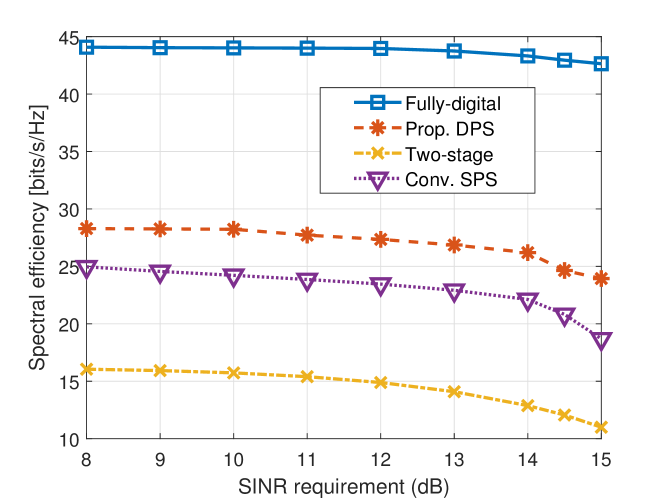
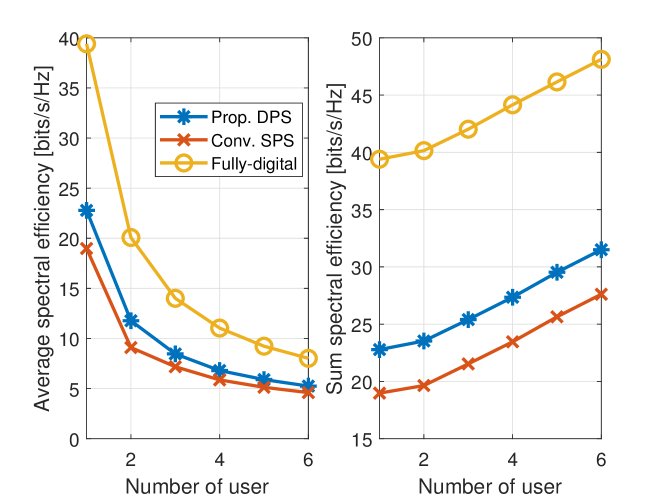
In this subsection, we assess the proposed DPS hybrid beamforming design presented in Section IV for the SU-MIMO system, in which a DFRC vehicle with antennas single-antenna users and detects the target from stationary clutters environment simultaneously. We assume that the priority weights of all users are set to be the same. Fig. 7 shows SE obtained by different methods versus the radar SINR requirement with RF chains serves . It can be seen that the proposed DPS hybrid beamforming method achieves much higher SE than the conventional SPS and the two-stage method in [43, 36]. This implies that the DPS structure is beneficial to improving the spectral efficiency. Finally, Fig. 8 analyzes the effect of number of users on the communication SE when considering dB. Specifically, we use the averaged SE (i.e., ) to describe system performance in left figure. As expected, the proposed DPS scheme outperforms the conventional SPS. In addition, it is interesting to note that as the number of users increases, the averaged SE becomes lower and lower. This is because the larger means the MUI received by each use is stronger, which leads to the worse averaged SE. Besides, the sum SE is also shown in the right figure. From the figure, we find that the sum SE increases with the number of users.
VI Conclusion
This paper considers the problem of the DPS-based HBF design for the mmWave DFRC system in the presence of the extended target and clutters. By designing the HBF, we maximize the communication spectral efficiency while guarantee the predefined radar SINR level and the HBF power budget. To solve the formulated nonconvex problem, a low complexity method based on the consensus-ADMM approach is proposed to optimize the DPS-based HBF. In addition, we have extended the proposed method from the single-user scenario to the MU-MISO one. The simulation results demonstrate that the DPS structure improves the system performance with a moderate increase of phase shifters. Accordingly, the proposed HBF system achieves an superior trade-off between the radar and communication properties comparing to the conventional SPS architecture.
Furthermore, we would like to emphasize that the accurate information of the FIRs of target and clutters is assumed known in this work. This assumption can be practically relaxed by considering the uncertainty range of the information, and consequently, the robust design problem could be formulated in the form of the max-min. In addition, the partial connection architecture of the phase shifter network can be extended to the dynamic one, for which the DPS can still be applied so that the system performance is expected to be further enhanced.
Appendix A Proof of Proposition 1
Based on the fact that and are statistically independent, we have
| (52) | ||||
where . Given that with
where is the -th column of , (52) can be written as
| (53) | ||||
Let , we have
| (54) |
Due to , one further gets
| (55) |
where and its -th block is defined as
| (56) |
with .
By defining
| (57) | ||||
we obtain
| (58) |
On the other hand, exploiting the derivation similar to (52), we have
| (59) | ||||
According to the equality that with
and letting , we have
| (60) |
where
| (61) |
with the -th block of the matrix defined as
| (62) |
Define
| (63) | ||||
we obtain
| (64) |
Next, let us derive (14b), since
| (67) | ||||
Utilizing the equality that with
we have
| (68) |
Besides, since , one obtains
| (69) |
Plugging (68) and (69) into (67) yields
| (70) | ||||
where is defined as
| (71) | ||||
Finally, for , we have
| (72) | ||||
where is defined as
| (73) | ||||
with being given by
| (74) |
Appendix B Proof of Theorem 1
The proof mainly includes two steps.
i) For fixed , the function is convex with respect to and . Then the closed-form solutions of and can be obtained by taking their first-order optimality conditions, which are given by and
ii) Substituting and into , we have
| (76) | ||||
Let be the eigen-decomposition of , one gets
| (77) | ||||
Appendix C Proof of Theorem 2
Specifically, introducing a Lagrange multiplier on the energy constraint in problem (29), we obtain the following Lagrangian function:
| (79) | ||||
whose first-order optimality condition is given by
| (80) |
where and are defined as and
Based on the complementary slackness of the KKT, i.e., , we have the following two cases:
i) If , we attain the optimal as , which must satisfy the condition .
ii) Otherwise, we must have . For this case, we define be the EVD of and , we have
| (81) |
Appendix D Proof of Theorem 3
More concretely, we introduce a dual variable for the constraint in problem (31). Based on the complementary slackness of the KKT, i.e. , we have the following two cases:
i) For , we can attain the optimal as , which must satisfy .
ii) For , we have
| (83) |
and the optimal , which is related with , as
| (84) |
References
- [1] B. Wang, Z. Cheng, L. Wu, and Z. He, “Hybrid beamforming design for OFDM dual-function radar-communication system with double-phase-shifter structure,” in 2022 30th European Signal Processing Conference (EUSIPCO), 2022, pp. 1067–1071.
- [2] W. Saad, M. Bennis, and M. Chen, “A vision of 6G wireless systems: Applications, trends, technologies, and open research problems,” IEEE Network, vol. 34, no. 3, pp. 134–142, 2020.
- [3] J. Choi, V. Va, N. Gonzalez-Prelcic, R. Daniels, C. R. Bhat, and R. W. Heath, “Millimeter-wave vehicular communication to support massive automotive sensing,” IEEE Communications Magazine, vol. 54, no. 12, pp. 160–167, 2016.
- [4] F. Liu, C. Masouros, A. P. Petropulu, H. Griffiths, and L. Hanzo, “Joint radar and communication design: Applications, state-of-the-art, and the road ahead,” IEEE Transactions on Communications, vol. 68, no. 6, pp. 3834–3862, 2020.
- [5] L. Zheng, M. Lops, Y. C. Eldar, and X. Wang, “Radar and communication coexistence: An overview: A review of recent methods,” IEEE Signal Processing Magazine, vol. 36, no. 5, pp. 85–99, 2019.
- [6] K. V. Mishra, M. B. Shankar, V. Koivunen, B. Ottersten, and S. A. Vorobyov, “Toward millimeter-wave joint radar communications: A signal processing perspective,” IEEE Signal Processing Magazine, vol. 36, no. 5, pp. 100–114, 2019.
- [7] C. Nunn and L. R. Moyer, “Spectrally-compliant waveforms for wideband radar,” IEEE Aerospace and Electronic Systems Magazine, vol. 27, no. 8, pp. 11–15, 2012.
- [8] A. Aubry, A. De Maio, M. Piezzo, and A. Farina, “Radar waveform design in a spectrally crowded environment via nonconvex quadratic optimization,” IEEE Transactions on Aerospace and Electronic Systems, vol. 50, no. 2, pp. 1138–1152, 2014.
- [9] A. Aubry, V. Carotenuto, and A. De Maio, “Forcing multiple spectral compatibility constraints in radar waveforms,” IEEE Signal Processing Letters, vol. 23, no. 4, pp. 483–487, 2016.
- [10] L. Wu, P. Babu, and D. P. Palomar, “Transmit waveform/receive filter design for MIMO radar with multiple waveform constraints,” IEEE Transactions on Signal Processing, vol. 66, no. 6, pp. 1526–1540, 2017.
- [11] Z. Cheng, B. Liao, Z. He, Y. Li, and J. Li, “Spectrally compatible waveform design for MIMO radar in the presence of multiple targets,” IEEE Transactions on Signal Processing, vol. 66, no. 13, pp. 3543–3555, 2018.
- [12] L. Wu and D. P. Palomar, “Sequence design for spectral shaping via minimization of regularized spectral level ratio,” IEEE Transactions on Signal Processing, vol. 67, no. 18, pp. 4683–4695, 2019.
- [13] S. Sodagari, A. Khawar, T. C. Clancy, and R. McGwier, “A projection based approach for radar and telecommunication systems coexistence,” in 2012 IEEE Global Communications Conference (GLOBECOM). IEEE, 2012, pp. 5010–5014.
- [14] B. Li, A. P. Petropulu, and W. Trappe, “Optimum co-design for spectrum sharing between matrix completion based MIMO radars and a MIMO communication system,” IEEE Transactions on Signal Processing, vol. 64, no. 17, pp. 4562–4575, 2016.
- [15] B. Li and A. P. Petropulu, “Joint transmit designs for coexistence of MIMO wireless communications and sparse sensing radars in clutter,” IEEE Transactions on Aerospace and Electronic Systems, vol. 53, no. 6, pp. 2846–2864, 2017.
- [16] F. Liu, C. Masouros, A. Li, H. Sun, and L. Hanzo, “Mu-MIMO communications with MIMO radar: From co-existence to joint transmission,” IEEE Transactions on Wireless Communications, vol. 17, no. 4, pp. 2755–2770, 2018.
- [17] J. A. Mahal, A. Khawar, A. Abdelhadi, and T. C. Clancy, “Spectral coexistence of MIMO radar and MIMO cellular system,” IEEE Transactions on Aerospace and Electronic Systems, vol. 53, no. 2, pp. 655–668, 2017.
- [18] L. Zheng, M. Lops, X. Wang, and E. Grossi, “Joint design of overlaid communication systems and pulsed radars,” IEEE Transactions on Signal Processing, vol. 66, no. 1, pp. 139–154, 2017.
- [19] Z. Cheng, B. Liao, S. Shi, Z. He, and J. Li, “Co-design for overlaid MIMO radar and downlink miso communication systems via cramér-rao bound minimization,” IEEE Transactions on Signal Processing, vol. 67, no. 24, pp. 6227–6240, 2019.
- [20] A. R. Chiriyath, B. Paul, G. M. Jacyna, and D. W. Bliss, “Inner bounds on performance of radar and communications co-existence,” IEEE Transactions on Signal Processing, vol. 64, no. 2, pp. 464–474, 2015.
- [21] S. D. Blunt, M. R. Cook, and J. Stiles, “Embedding information into radar emissions via waveform implementation,” in 2010 International waveform diversity and design conference. IEEE, 2010, pp. 000 195–000 199.
- [22] S. D. Blunt, J. G. Metcalf, C. R. Biggs, and E. Perrins, “Performance characteristics and metrics for intra-pulse radar-embedded communication,” IEEE Journal on Selected Areas in Communications, vol. 29, no. 10, pp. 2057–2066, 2011.
- [23] S. D. Blunt, P. Yatham, and J. Stiles, “Intrapulse radar-embedded communications,” IEEE Transactions on Aerospace and Electronic Systems, vol. 46, no. 3, pp. 1185–1200, 2010.
- [24] A. Hassanien, M. G. Amin, Y. D. Zhang, and F. Ahmad, “Dual-function radar-communications: Information embedding using sidelobe control and waveform diversity,” IEEE Transactions on Signal Processing, vol. 64, no. 8, pp. 2168–2181, 2015.
- [25] ——, “Phase-modulation based dual-function radar-communications,” IET Radar, Sonar & Navigation, vol. 10, no. 8, pp. 1411–1421, 2016.
- [26] A. Hassanien, B. Himed, and B. D. Rigling, “A dual-function MIMO radar-communications system using frequency-hopping waveforms,” in 2017 IEEE Radar Conference. IEEE, 2017, pp. 1721–1725.
- [27] S. H. Dokhanchi, B. S. Mysore, K. V. Mishra, and B. Ottersten, “A mmwave automotive joint radar-communications system,” IEEE Transactions on Aerospace and Electronic Systems, vol. 55, no. 3, pp. 1241–1260, 2019.
- [28] Z. Cheng, S. Shi, Z. He, and B. Liao, “Transmit sequence design for dual-function radar-communication system with one-bit DACs,” IEEE Transactions on Wireless Communications, vol. 1, no. 1, pp. 1–15, 2021.
- [29] S. H. Dokhanchi, M. B. Shankar, M. Alaee-Kerahroodi, and B. Ottersten, “Adaptive waveform design for automotive joint radar-communication systems,” IEEE Transactions on Vehicular Technology, vol. 70, no. 5, pp. 4273–4290, 2021.
- [30] F. Liu, L. Zhou, C. Masouros, A. Li, W. Luo, and A. Petropulu, “Toward dual-functional radar-communication systems: Optimal waveform design,” IEEE Transactions on Signal Processing, vol. 66, no. 16, pp. 4264–4279, 2018.
- [31] S. Hossein Dokhanchi, M. B. Shankar, T. Stifter, and B. Ottersten, “Multicarrier phase modulated continuous waveform for automotive joint radar-communication system,” in 2018 IEEE 19th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), 2018, pp. 1–5.
- [32] D. Garmatyuk, J. Schuerger, and K. Kauffman, “Multifunctional software-defined radar sensor and data communication system,” IEEE Sensors Journal, vol. 11, no. 1, pp. 99–106, 2011.
- [33] C. Sturm and W. Wiesbeck, “Waveform design and signal processing aspects for fusion of wireless communications and radar sensing,” Proceedings of the IEEE, vol. 99, no. 7, pp. 1236–1259, 2011.
- [34] M. F. Keskin, V. Koivunen, and H. Wymeersch, “Limited feedforward waveform design for ofdm dual-functional radar-communications,” IEEE Transactions on Signal Processing, vol. 69, pp. 2955–2970, 2021.
- [35] E. Zhang and C. Huang, “On achieving optimal rate of digital precoder by RF-baseband codesign for MIMO systems,” in 2014 IEEE 80th Vehicular Technology Conference (VTC2014-Fall). IEEE, 2014, pp. 1–5.
- [36] X. Yu, J.-C. Shen, J. Zhang, and K. B. Letaief, “Alternating minimization algorithms for hybrid precoding in millimeter wave MIMO systems,” IEEE Journal of Selected Topics in Signal Processing, vol. 10, no. 3, pp. 485–500, 2016.
- [37] S. Han, I. Chih-Lin, Z. Xu, and C. Rowell, “Large-scale antenna systems with hybrid analog and digital beamforming for millimeter wave 5G,” IEEE Communications Magazine, vol. 53, no. 1, pp. 186–194, 2015.
- [38] F. Sohrabi and W. Yu, “Hybrid digital and analog beamforming design for large-scale antenna arrays,” IEEE Journal of Selected Topics in Signal Processing, vol. 10, no. 3, pp. 501–513, 2016.
- [39] Z. Wang, M. Li, Q. Liu, and A. L. Swindlehurst, “Hybrid precoder and combiner design with low-resolution phase shifters in mmwave MIMO systems,” IEEE Journal of Selected Topics in Signal Processing, vol. 12, no. 2, pp. 256–269, 2018.
- [40] O. E. Ayach, S. Rajagopal, S. Abu-Surra, Z. Pi, and R. W. Heath, “Spatially sparse precoding in millimeter wave MIMO systems,” IEEE Transactions on Wireless Communications, vol. 13, no. 3, pp. 1499–1513, 2014.
- [41] A. Alkhateeb and R. W. Heath, “Frequency selective hybrid precoding for limited feedback millimeter wave systems,” IEEE Transactions on Communications, vol. 64, no. 5, pp. 1801–1818, 2016.
- [42] J. Mo, A. Alkhateeb, S. Abu-Surra, and R. W. Heath, “Hybrid architectures with few-bit ADC receivers: Achievable rates and energy-rate tradeoffs,” IEEE Transactions on Wireless Communications, vol. 16, no. 4, pp. 2274–2287, 2017.
- [43] F. Liu and C. Masouros, “Hybrid beamforming with sub-arrayed MIMO radar: Enabling joint sensing and communication at mmWave band,” in ICASSP 2019 - 2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2019, pp. 7770–7774.
- [44] Z. Cheng, Z. He, and B. Liao, “Hybrid beamforming for multi-carrier dual-function radar-communication system,” IEEE Transactions on Cognitive Communications and Networking, pp. 1–1, 2021.
- [45] L. Wu, P. Babu, and D. P. Palomar, “Cognitive radar-based sequence design via SINR maximization,” IEEE Transactions on Signal Processing, vol. 65, no. 3, pp. 779–793, 2016.
- [46] B. Yazici and G. Xie, “Wideband extended range-doppler imaging and waveform design in the presence of clutter and noise,” IEEE Transactions on Information Theory, vol. 52, no. 10, pp. 4563–4580, 2006.
- [47] C.-Y. Chen and P. P. Vaidyanathan, “MIMO radar waveform optimization with prior information of the extended target and clutter,” IEEE Transactions on Signal Processing, vol. 57, no. 9, pp. 3533–3544, 2009.
- [48] A. Leshem, O. Naparstek, and A. Nehorai, “Information theoretic adaptive radar waveform design for multiple extended targets,” IEEE Journal of Selected Topics in Signal Processing, vol. 1, no. 1, pp. 42–55, 2007.
- [49] T. E. Bogale, L. B. Le, A. Haghighat, and L. Vandendorpe, “On the number of RF chains and phase shifters, and scheduling design with hybrid analog–digital beamforming,” IEEE Transactions on Wireless Communications, vol. 15, no. 5, pp. 3311–3326, 2016.
- [50] Y.-P. Lin, “On the quantization of phase shifters for hybrid precoding systems,” IEEE Transactions on Signal Processing, vol. 65, no. 9, pp. 2237–2246, 2016.
- [51] X. Yu, J. Zhang, and K. B. Letaief, “Doubling phase shifters for efficient hybrid precoder design in millimeter-wave communication systems,” Journal of Communications and Information Networks, vol. 4, no. 2, pp. 51–67, 2019.
- [52] Q. Shi, M. Razaviyayn, Z.-Q. Luo, and C. He, “An iteratively weighted mmse approach to distributed sum-utility maximization for a MIMO interfering broadcast channel,” IEEE Transactions on Signal Processing, vol. 59, no. 9, pp. 4331–4340, 2011.
- [53] S. Boyd, N. Parikh, E. Chu, B. Peleato, J. Eckstein et al., “Distributed optimization and statistical learning via the alternating direction method of multipliers,” Foundations and Trends® in Machine learning, vol. 3, no. 1, pp. 1–122, 2011.
- [54] Yin, Haifan, Gesbert, David, Filippou, Miltiades, Liu, and Yingzhuang, “A coordinated approach to channel estimation in large-scale multiple-antenna systems,” IEEE Journal on Selected Areas in Communications, vol. 31, no. 2, pp. 264–273, 2013.
- [55] O. Simeone, Y. Bar-Ness, and U. Spagnolini, “Pilot-based channel estimation for ofdm systems by tracking the delay-subspace,” Wireless Communications IEEE Transactions on, vol. 3, no. 1, pp. 315–325, 2004.
- [56] L. Liang, W. Xu, and X. Dong, “Low-complexity hybrid precoding in massive multiuser MIMO systems,” IEEE Wireless Communications Letters, vol. 3, no. 6, pp. 653–656, 2014.
- [57] J. R. Guerci, “Cognitive radar: A knowledge-aided fully adaptive approach,” in 2010 IEEE Radar Conference. IEEE, 2010, pp. 1365–1370.
- [58] C.-Y. Chen and P. Vaidyanathan, “MIMO radar waveform optimization with prior information of the extended target and clutter,” IEEE Transactions on Signal Processing, vol. 57, no. 9, pp. 3533–3544, 2009.
- [59] A. De Maio, S. De Nicola, Y. Huang, D. P. Palomar, S. Zhang, and A. Farina, “Code design for radar stap via optimization theory,” IEEE Transactions on Signal Processing, vol. 58, no. 2, pp. 679–694, 2010.
- [60] S. Boyd and L. Vandenberghe, Convex optimization. Cambridge university press, 2004.
- [61] E. Dahlman, S. Parkvall, and J. Skold, 5G NR: The next generation wireless access technology. Academic Press, 2020.
- [62] J. Nocedal and S. Wright, Numerical optimization. Springer Science & Business Media, 2006.