RESEARCH PAPER \Year2022 \Month \Vol \No \DOI \ArtNo \ReceiveDate \ReviseDate \AcceptDate \OnlineDate
CToMP: A Cycle-task-oriented Memory Protection Scheme for Unmanned Systems
Ma C Y
Ma C Y, Xi N, Lu D, et al
CToMP: A Cycle-task-oriented Memory Protection Scheme for Unmanned Systems
Abstract
Memory corruption attacks (MCAs) refer to malicious behaviors of system intruders that modify the contents of a memory location to disrupt the normal operation of computing systems, causing leakage of sensitive data or perturbations to ongoing processes. Unlike general-purpose systems, unmanned systems cannot deploy complete security protection schemes, due to their limitations in size, cost and performance. MCAs in unmanned systems are particularly difficult to defend against. Furthermore, MCAs have diverse and unpredictable attack interfaces in unmanned systems, severely impacting digital and physical sectors.
In this paper, we first generalize, model and taxonomize MCAs found in unmanned systems currently, laying the foundation for designing a portable and general defense approach. According to different attack mechanisms, we found that MCAs are mainly categorized into two types—return2libc and return2shellcode. To tackle return2libc attacks, we model the erratic operation of unmanned systems with cycles and then propose a cycle-task-oriented memory protection (CToMP) approach to protect control flows from tampering. To defend against return2shellcode attacks, we introduce a secure process stack with a randomized memory address by leveraging the memory pool to prevent Shellcode from being executed. Moreover, we discuss the mechanism by which CToMP resists the ROP attack, a novel variant of return2libc attacks. Finally, we implement CToMP on CUAV V5+ with Ardupilot and Crazyflie. The evaluation and security analysis results demonstrate that the proposed approach CToMP is resilient to various MCAs in unmanned systems with low footprints and system overhead.
keywords:
unmanned system, memory corruption attack, memory protection, system security, randomized memory address1 Introduction
Unmanned systems are embedded computing systems that monitor, respond to, or control an external environment through sensors, actuators, and other input/output interfaces [1]. Such systems must meet various constraints, such as timing, efficiency, security, etc., that are imposed on them by real-time behaviors of the external world they interface with. These unmanned systems wide ranging applications, such as search and rescue [2], agriculture [3], and autonomous vehicles. However, the increasing popularity of unmanned systems increases security concerns regarding them [4, 5]. According to recent studies [6, 7, 8], current unmanned systems continue to possess a myriad of flaws that can be leveraged by malicious parties to launch attacks, affecting their proper operations, stealing private data of users, or even endangering public safety.
Among all the threats encountered by unmanned systems, software-oriented attacks are emerging and gradually becoming one of the most concerning. These attacks exploit software vulnerabilities within the unmanned system firmware to maliciously interfere with system operations, however, it has received attention only recently [9, 10, 11]. Particularly, memory corruption attacks (MCAs) [12], a special form of software-oriented attacks, are becoming increasingly rampant [13, 14, 15]. Unlike the segmented memory management in general computer systems, the user code in unmanned systems shares the same physical memory with the kernel. This design enables the user code to directly access, invoke, or even tamper with critical kernel instructions. Furthermore, unmanned systems usually allow memory access from peripherals (e.g., ZigBee and WiFi), thereby allowing malicious parties to launch MCAs even wirelessly. For example, in UAV systems, attackers can launch MCAs to modify the return addresses of stack frames remotely, thereby seizing the control of drones through memory overflows. Recent studies [16, 14] have demonstrated the feasibility and risk of such MCAs in the real world. Therefore, designing a practical and effective methodology to defend against MCAs is vital for ensuring the reliability and stability of unmanned systems.
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/8a81817b-60d1-46dc-9c8c-dd9d33109c85/x1.png)
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/8a81817b-60d1-46dc-9c8c-dd9d33109c85/x2.png)
Multiple approaches have been proposed to tackle MCAs in unmanned systems. Their principal methodology is equipping unmanned systems with memory management mechanisms to isolate the kernel from the user code. Widely used techniques to achieve memory isolation include TrustZone [17] and Memory Protection Unit (MPU) [13, 14, 18]. Because the microcontroller units (MCUs) used by unmanned systems rarely have TrustZone, more approaches focusing on employing MPU are required to tackle MCAs (e.g., MINION [14]). According to multitasking and modular programming features in unmanned systems, these approaches first create a memory view for the user code of each task from the perspectives of code reachability, I/O interfaces, and in-memory data. This process can be done manually or semi-automatically using Low-Level Virtual Machine (LLVM) [19]. They then leverage MPU to securely switch memory views in task switchover, as shown in Figure 2. Although this methodology can limit MCAs to a certain extent, it has several drawbacks. First, by applying such approaches, programmers must consider memory range divisions in developments, which will confuse developers. Moreover, existing approaches can cause considerable system overhead, reducing the processing power of unmanned systems. We conducted some performance tests by implementing MINION, the most representative of these approaches, on a UAV based on CUAV V5+ hardware with firmware Ardupilot. We found that some low-priority tasks in MINION cannot reach the execution frequency in the original system because of the time and system overheads caused by the memory view switching and MPU configuration (Figure 2). This flaw is particularly fatal to unmanned systems with strict real-time requirements. For example, the execution frequency of tasks update_gcs_send and ins_periodic is reduced by half. This reduction caused a severe problem: we could not receive the Mavlink messages sent by the drone to the ground station in time, and the drone could not perceive its own acceleration and other states in real time. Eventually, the drone lost control and crashed. Moreover, such approaches only use MPU to protect the memory security of unmanned systems. However, because of the hardware performance limitation, the upper limit of the memory regions MPU can protect is 16; hence, these approaches lack extensibility in the face of complex unmanned systems.
To fill this gap, herein, we propose an effective and efficient approach called cycle-task-oriented memory protection (CToMP) to protect unmanned systems from MCAs. Unlike existing approaches that isolate memory regions for each task, CToMP treats tasks executed within one cycle as a whole and focuses on protecting a few critical codes, variables, and registers. To reduce the system overhead and ensure the timeliness of tasks, CToMP releases the pressure of memory view switching and MPU configuration by performing security operations and memory allocations right before starting each cycle rather than before beginning each task. To enhance the security and prevent the execution of injected Shellcode, CToMP dynamically assigns the process stack address and buffer addresses by randomizing memory allocations.
Compared with previously reported approaches to resist MCAs, CToMP makes the following contributions:
-
•
To simplify the defense interface, we summarize the existing MCAs for unmanned systems and classify them into two categories (i.e., return2libc and return2shellcode) based on their execution of Shellcode.
-
•
We establish a cycle-based operation model for unmanned systems as the foundation for our system design. To our knowledge, CToMP is a brand-new memory protection approach for unmanned systems. Moreover, we build a secure process stack based on randomized memory allocation to enhance system security.
-
•
By evaluating CToMP on two unmanned platforms (CUAV V5+ with Ardupilot and Crazyflie), its effectiveness and efficiency are verified. Our approach defends against MCAs without compromising the real-time performance of unmanned systems.
2 Security Model & Motivation
In this section, we elaborate on necessary background knowledge to help readers understand our system design. Later, to simplify the defense interface, we summarize and taxonomize existing MCAs against unmanned systems, classifying them into two categories (i.e., return2libc and return2shellcode). Finally, we demonstrate the motivations of our proposed approach.
2.1 Background
As for power consumption, hardware platforms of unmanned systems are still dominated by low-cost MCUs, such as STM32 series based on the ARM Cortex-M architecture. To ensure the availability of systems, the development of unmanned systems focuses more on realizing more applications with limited software and hardware resources rather than security protection that may take up more resources. However, these low-cost MCUs are also designed with security features, which have not been taken seriously. We will briefly introduce these features.
2.1.1 Execution Levels
Privileged and unprivileged modes are two execution levels of MCUs [20]. In privileged mode, the code can invoke all available instructions and access all resources (e.g., system registers, memory, and peripherals). In unprivileged mode, the code only has limited access to some resources. Any access to unpermitted registers, including MPU, SysTick timer, and Nested vectored interrupt controller (NVIC), will raise hardware exceptions. Therefore, the kernel can be placed in privileged mode, and user code related to the unmanned system task implementation can be placed in unprivileged mode.
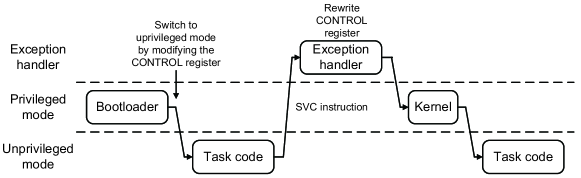
The CONTROL register determines whether the code executes in privileged or unprivileged mode. Only in privileged mode can the code modify the CONTROL register, thereby changing the execution level to unprivileged mode. Correspondingly, in unprivileged mode, the code cannot change the execution level by directly modifying the CONTROL register. Instead, it must call the SVC instruction to switch the system to a handler mode, in which the code can change to privileged mode, as shown in Figure 3.
2.1.2 Stack Pointer
| Execution level | Used to execute | Stack used | ||
| Privileged |
|
Main stack | ||
| Unprivileged | Tasks | Process stack |
Another key point is that the code will use a separate descending stack in privileged and unprivileged mode, respectively. Consequently, MCUs must implement two stacks, the main stack and the process stack. Meanwhile, each stack has an independent stack pointer holding the address of the last stacked item in memory; we call them the MSP and PSP. When the code needs to invoke kernel operations, it typically switches to the main stack, and the tasks always use the process stack. We summarize these features in Table 1.
2.1.3 Memory Protection Unit
Cortex-M is the most commonly used ARM processor for embedded unmanned systems. MPU is a security kernel feature of the Cortex-M series MCUs [21]. It can set the properties and access permissions of different memory addresses by dividing the memory map into several regions, such as whether a certain address range is allowed to be executed, read, or written. Furthermore, MPU can isolate system resources and code by limiting access permissions in privileged and unprivileged modes. If the code accesses a memory region that MPU protects without permission, the processor will throw a fault exception, which can prevent illegal memory access.
2.2 Security Model

| No. | Attack Case | Attack Type | Attack Target |
| ① | Process Termination | return2libc | Reusing kill() function in the Code area. |
| ② | Servo Operation | Invoking up_pwm_servo_set() in the Code area with two abnormal args (channel and value) to change the speed of motors. | |
| ③ | Control Parameter Attack | return2shellcode | Overwriting the PID parameters in the Data area. |
| ④ | Soft Timer Attack | Overwriting ticks and last_run two count parameters in the Data area. | |
| ⑤ | Memory Remapping | Copying the malicious code to FLASH and replacing the existing function in the Code area. | |
| ⑥ | RC Disturbance | Modifying RC-related registers in the Peripheral area. | |
| ⑦ | Hard Timer Attack | Reloading the system timer value of SYST_RVR in the Private Peripheral area. | |
| ⑧ | Interrupt Vector Overriding | Overriding NVIC registers in the Private Peripheral area. |
In MCAs attackers use memory vulnerabilities to inject Shellcode into the stack to achieve various malicious operations. As shown in Figure 4, Shellcode can be executed in two ways. Type I involves overwriting the return address in the stack to the existing function address in memory so that the device can perform some operations that are not allowed or illogical; it is called return2libc. Type II involves overwriting the return address in the stack with the starting address of Shellcode to execute the malicious behavior customized by the attacker. We name it return2shellcode. Additionally, MCAs for embedded unmanned systems are subdivided into several cases in Table 2 according to different Shellcode attack targets. Notably, as a variant of return2libc attack, the ROP attack [22, 23] has been widely discussed on x86 architecture systems. This attack executes instruction sequences, called gadgets, in the existing code area through the stack overflow vulnerability, and each gadget ends with a ret instruction. By chaining these gadgets together with Shellcode, an attacker can modify registers or some memory data. In the unmanned system scenario, the ROP attack is similar to attack case ② in Table 2.
Because of hardware and performance limitations, the existing embedded development platforms do not have memory isolation or address randomization and other security protection measures that can effectively avoid MCAs. Therefore, we believe that MCAs are ubiquitous in embedded unmanned systems. We assume the attackers have the following abilities to find and exploit memory vulnerabilities to perform attacks.
- •
- •
- •
Because Shellcode must be injected from outside the system, the vulnerabilities that can be easily exploited by attackers lie in the user code interacting with the outside rather than in the kernel responsible for interrupt management, task scheduling and other internal features. After discovering the vulnerabilities, attackers write ShellCode and tamper with the return address of the stack frame to achieve MCAs. Because all codes in an MCU share the same physical memory, an attacker who launches an attack from the user code can modify key parameters in the memory by injecting malicious instructions. In addition to attackers, ordinary users may also modify key parameters in the kernel because of misoperation, such as setting unreasonable PID parameters through MAVLink commands [35], which can also have disastrous consequences.
2.3 Finding of Drawbacks in Relevant Works
At present, the most effective solution to MCAs is to implement memory isolation between the kernel space and user code, which limits the range that malicious code can access in memory [13, 14, 36, 18]. These relevant works achieve memory isolation by building a memory view for each task, just like running a task in a Sandbox, and we summarize them as task-oriented solutions. Task-oriented memory isolation requires configuring MPU registers for the next task after one task ends, which is called memory view switching. Since MPU registers are accessible only in privileged mode, memory view switching must enter an exception handler and switch mode while the task runs in unprivileged mode. We summarize two stages in memory view switching as follows:
First, before task application execution, the following steps are required:
-
(1)
The scheduler reads the task information list and decides which task must be executed next.
-
(2)
The system initializes the process stack required by the task code and switches the memory view to configure the memory regions that the task can access by MPU.
-
(3)
The system switches from the main stack to the process stack.
-
(4)
The system switches the execution level from privileged mode to unprivileged mode.
Second, to switch from unprivileged mode to privileged mode after task completion, the following steps are required:
-
(1)
The system enters SVC interrupt through a system call, and switches from unprivileged mode to privileged mode.
-
(2)
Then, the system switches the stack pointer from PSP to MSP.
| Stage | MPU Configure | Stack Initialize and Switch |
| Time (sec) | 9-15 | 10 |
| Stage | SVC System Call | Execution Level Switch |
| Time (sec) | 1 | 1 |
Through experiments, we also sorted out the time spent in each step, as shown in Table 3. However, when we applied this task-oriented solution to Ardupilot, an open-source unmanned system firmware, efficiency problems emerged. In the search for the cause, we found that although the task scheduling of unmanned systems is uncertain and irregular in the traditional concept, we can use a cycle-based model to describe it. Unmanned systems perform a certain number of tasks during each cycle. We will describe this model in detail in §3.1. Since at least seven tasks need executing in one cycle in Ardupilot, it takes at least 154sec for frequent memory view switching between tasks. Consequently, some low-priority tasks cannot obtain the time in a cycle to execute, which affects unmanned system availability. Therefore, we consider whether we can use MPU to manage the memory access range of a cycle, which is similar to putting all tasks in a cycle into a sandbox rather than putting one task into one sandbox. This approach reduces the frequency of memory view switching, thereby improving system efficiency.
However, we need to prevent attackers from attacking tasks in the same cycle. When we simultaneously manage several tasks in a cycle with MPU, tasks do not securely access the code and data from each other because they share the same region of memory. We determine the static loading of the code as the reason why embedded unmanned systems are vulnerable to MCAs. This attribute allows attackers to easily analyze the call stack and memory addresses and inject Shellcode to cause damage. Therefore, we hope to implement random memory allocation, which is not widely used in embedded unmanned systems because of the lack of the Memory Management Unit (MMU), and improve the difficulty of memory analysis, so as to achieve the purpose of protecting user code and data in the same cycle.
3 Design
In this section, we elaborate on the design of CToMP. According to the use characteristics and requirements of unmanned systems, we have determined the following design goals:
-
G1
Security. Our design needs to be resistant to MCAs.
-
G2
Efficiency. After our design is added to unmanned systems, it only brings a minimum runtime overhead, and cannot affect the real-time requirement of task execution.
-
G3
Extensibility. Our design can adapt to different functional requirements in different scenarios rather than being fixed.
-
G4
Low Footprint. Due to the limitation of memory size in unmanned systems, our design cannot occupy too much memory space.
-
G5
Generality. Our design can be easily adapted to different unmanned devices without much additional development work.
Following these design goals, We first model the operation of unmanned systems in §3.1. Then, we introduce the overall system architecture in §3.2. In addition, we describe the structure of the secure process stack in §3.3 and the workflow of CToMP in §3.4.
3.1 Cycle-based Model of Unmanned Systems
| Firmware | RTOS |
|
Application Scenarios | ||
| Ardupilot | ChibiOS | 49 | UAVs, Rovers, Submarines, … | ||
| PX4 | Nuttx | 27 | Drones, VTOLs, Rovers, … | ||
| FMT | RT-Thread | 6 | UAVs, Cars, Robots, … | ||
| Paparazzi | ChibiOS | 9 | Rotorcrafts, Hybrids, Boats, … | ||
| Crazyflie | FreeRTOS | 37 | Drones |
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/8a81817b-60d1-46dc-9c8c-dd9d33109c85/x5.png)
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/8a81817b-60d1-46dc-9c8c-dd9d33109c85/x6.png)
Unmanned systems encapsulate simple functions such as sensor reading/writing and actuator execution into multiple tasks, and realize more complex remote control or autonomous operations through the cooperation between tasks. In the traditional concept, the unmanned system, as a real-time system, requires each task to be completed at a certain time, and these tasks are triggered uncertainly by the external environment. For example, we cannot predict when the unmanned system will encounter an obstacle and change its trajectory. Table 4 summarizes the results of our research on various unmanned system firmware applicable to drones, rovers, and boats. However, we found that although the number of tasks in these firmware varies, they all rely on the real-time operating system (RTOS) to implement task scheduling. Further, the scheduling algorithms in these RTOSes are composed of preemptive scheduling and round robin. This means, in practical design, unmanned systems only need to implement three stages of functions—environment perception, behavior decision and action execution, which are supported by tasks within a specified time period to meet the real-time requirement, and we call this time period a cycle. As shown in Figure 6, we regularize seemingly uncertain and irregular task executions in unmanned systems with cycle-based modeling, thereby laying the foundation for our system design. In detail, in Figure 6 represents the cycle frequency, that is, how many cycles will be experienced in one second, and the longest available duration of one cycle is seconds. Then for task , its frequency is determined by the average cycle interval (ACI) at which it can be scheduled:
| (1) |
For example, in an unmanned system with a cycle frequency of 400Hz, a task is executed every two cycles on average, then the frequency of this task is 200Hz. What’s more, each task is given a priority. In a cycle, high-priority tasks must be scheduled first, while low-priority tasks will use the remaining time as needed after the execution of high-priority tasks. This enables each task to meet its functional requirements as much as possible. Therefore, it can be obtained that the less time a cycle takes, the faster the cycle frequency becomes, and each task can be scheduled in a more timely manner, so the real-time requirement of the unmanned system is guaranteed. Conversely, if the single cycle time is long, the system reliability will be reduced.
3.2 System Architecture
The main goal of our system design is to prevent attackers from exploiting victim tasks with memory vulnerabilities to access kernel code or modify memory data. Specifically, our approach should be able to defend against each attack case in §2.2 effectively. As illustrated in Figure 6, in our system architecture, the code segment, data segment, and device address segment in the memory are separated by MPU into two environments: privileged mode and unprivileged mode. According to the assumptions in §2.2, as user code for all tasks is executed in unprivileged mode, the Shellcode injected by an attacker to exploit memory vulnerabilities usually occurs in unprivileged mode. Unlike relevant task-oriented approaches that require designing a memory view for each task and attack to defend against MCAs, our solution focuses on blocking two attack paths of Shellcode to secure the unmanned systems. We explain how this architecture meets the design goal G1 Security as follows.
Defense against return2libc: Since functions located in privileged mode cannot be directly called by user code running in unprivileged mode, for attack cases ① and ②, we place two functions kill and up_pwm_servo_set in privileged mode. The kill is a kernel function used by RTOS in unmanned systems to terminate the task. The up_pwm_servo_set is a function used to control the execution of actuators in unmanned systems. Malicious calls to both of these functions can have catastrophic consequences, such as the crash of drones and changing the driving path of unmanned vehicles. Therefore we configure them with MPU not to be accessible in unprivileged mode to prevent Shellcode written by attackers from maliciously jumping to their function addresses.
Defense against ROP: According to the description in §2.2, the ROP attack achieves the goal of executing malicious code by exploiting gadgets of existing code and concatenating them. But as we explained in defending against return2libc attacks, the code containing sensitive parameters has been protected by MPU, so attackers cannot jump to gadgets that can modify these parameters through Shellcode. Although attackers can still exploit gadgets located in unprivileged mode, these gadgets cannot access registers and data protected by MPU; hence, our architecture can still effectively resist the ROP attack.
Defense against return2shellcode: In this attack way, the attacker can execute more malicious instructions in Shellcode and destroy more memory data. Since all code in the MCU shares the same physical memory, in the absence of memory isolation, the attacker’s targets include, but are not limited to, the PID parameters that control the unmanned system attitude, the count parameters responsible for task scheduling, and various peripherals such as sensors and system Timer. Here we use two solutions to protect them.
First, for attack cases ③, ⑦, and ⑧, the data and registers in these attack objects should be configured and fixed in memory when the unmanned system is initialized. Therefore, we only need to configure these parameters and registers to be unmodifiable in unprivileged mode with MPU after they are set. They can be effectively protected from being accessed by the attacker’s Shellcode. At the same time, we configure the entire code segment to be non-writable with MPU, so that attack case ⑤ cannot overwrite the existing code with malicious instructions through Shellcode.
For attack case ④, ticks and last_run, these two count parameters are used for task scheduling, and they are changed in each cycle to ensure that the execution of each task can meet the functional requirements. Parameter ticks is the number of cycles that have passed, last_run is an array used to calculate the interval between the last executed cycle of each task and the current cycle. Therefore, we set the two parameters to be modifiable only in privileged mode. When the tasks of a cycle are executed, the system switches the execution level once, and then updates these two parameters after entering privileged mode, which can satisfy the task scheduling and parameter security.
Finally, for some code and data that must share the memory with other tasks, such as reading remote control variables from registers that can only run in unprivileged mode (attack case ⑥), we design another solution to protect their security. By analyzing the execution condition of return2shellcode, we found that the attacker needs to obtain the starting address of injected Shellcode to jump to the malicious code execution area by tampering with the return address in the stack. Due to the static loading code of MCUs, it is easy for an attacker to analyze the required memory address and implement malicious behavior. However, we noticed that using the two instructions __set_PSP and __set_CONTROL(SP_PROCESS) can specify an area in memory as the process stack used by tasks. If we randomize the stack in each cycle, it will be much more difficult for an attacker to analyze the starting address of Shellcode, which can effectively prevent the execution of Shellcode. Therefore, we design a memory pool in unprivileged mode to dynamically allocate a random address area for the stack used in each cycle.
In summary, CToMP can resist all attack cases and meet the design goal G1 Security. At the same time, different from task-oriented solutions, we manage the memory access range of tasks in a cycle as a whole, so that the MPU configuration and execution level switching do not need to be performed between tasks, but only before the start of a cycle, so as to satisfy the design goal G2 Efficiency. In addition, since MPU in MCUs can protect up to 16 memory regions, it is difficult for solutions that only rely on MPU to play a protective role when the functions of unmanned systems are gradually complex. Our solution can effectively prevent the execution of Shellcode by randomizing the process stack, and is not limited by the number of MPU-protected memory regions and other hardware resources, which meets the design goal G3 Extensibility. What’s more, we only add a memory pool area into the system architecture to achieve dynamic memory allocation, and we will describe how the memory pool satisfies the design goal G4 Low Footprint in §3.3. Last but not least, MPU, execution levels and the process stack are features supported by most unmanned system MCUs, so our system architecture can be easily adapted to other unmanned system firmware and RTOSes, and our design realizes the G5 Generality.
3.3 Secure Process Stack
Unfortunately, due to the lack of MMU support, MCUs for unmanned systems do not support dynamic memory allocation, or can only allocate memory blocks with fixed addresses, which does not meet our needs for randomizing the process stack. For example, only three fixed regions are provided for memory allocation to choose from in ChibiOS, which supports the unmanned system firmware Ardupilot. In order to be compatible with the existing memory allocation solutions in unmanned systems, we designate an area in memory as a memory pool. We use the following structure array to denote the usage of the memory pool.
In this structure, we define a pointer to the allocated memory region, the start addresses of the region and the allocation size. At the same time, we also need to specify the maximum number of memory regions that can be allocated by defining the value of MAX_ALLOCATE_NUM. Three functions are designed to allocate, re-allocate and free memory:
As described in Algorithm 1, mem_alloc uses the True Random Number Generator (TRNG) [37] supported by ARM Cortex-M series MCUs to generate a start address of the memory area to be allocated. Then, when the number of allocated regions does not reach the maximum setting, the allocator needs to traverse all memory regions in the structure array allocated_region to check whether there is a conflict between the to-be-allocated region and the allocated regions. If there is no conflict, the allocator should save the region information into the structure array. Otherwise, it will find the allocatable region again by mem_realloc. To free the allocated memory, it just needs to call mem_free to delete the information of the pointer in the structure array.
| Name | ADC sample | DMA buffer | RX bounce buffer |
| Size (Byte) | 144 | 304 | 64 |
| Name | TX bounce buffer | FIFO buffer | Process stack |
| Size (Byte) | 64 | 112 | 1024 |
In order to measure the space occupancy of the memory pool, we summarize the stack and buffers that use memory allocation and the size of regions they require in Table 5. It can be seen only five buffers and one stack need to dynamically allocate memory; the value of MAX_ALLOCATE_NUM should be set to 6, which means that the space occupied by the structure array allocated_region is 72 bytes. At the same time, the total memory space required for these buffers and the process stack is 1712 bytes. In order to ensure the randomness of the process stack space address, we set the size of the memory pool to 5632 bytes, which is about three times the size of the total required space. Since most MCUs have 1MB-2MB of Flash ROM and 192KB-512KB of SRAM, the memory pool we designed has a very small footprint and can meet the design goal G4.

On the other hand, in order to secure the memory allocation, we need to configure the three functions and the struct array allocated_region to be accessible only in privileged mode with MPU. Only the memory pool can be accessed by tasks in unprivileged mode. Due to the real-time requirement of unmanned systems, the data in these buffers that need to dynamically allocate memory are only valid for one cycle; that is, they will not be available in the next cycle. So we allocate memory for them at the beginning of a cycle and release them at the end of the cycle, which can effectively meet their usage requirements. This also means that we do not need to perform frequent execution level switching in order to securely allocate memory by MPU. As illustrated in Figure 7, we implement a secure process stack to resist Shellcode execution.
3.4 Workflow of CToMP

Our approach works upon cycle-based task modeling, where three stages of functions (i.e., environment perception, behavior decision, and action execution in one cycle) are embedded within. The workflow of CToMP corresponds to the three stages of functions in one cycle.
First, use MPU to configure hardware and software resources that can be accessed in one cycle. Then, a region is allocated in the memory pool for tasks of this cycle as a secure process stack. At the same time, we also need to allocate regions in the memory pool for other buffers. Next, we use the __set_CONTROL instruction to make the stack pointer point to the secure process stack and switch the execution level to unprivileged mode.
In unprivileged mode, each task is scheduled on demand based on the priority and two soft timing parameters (ticks and last_run) that are read-only in this mode. At this stage, the unmanned system uses various sensors and communication equipment to complete the perception of the surrounding environment and its own state and receive control commands.
After tasks in a cycle are executed, the unmanned system needs to switch back to privileged mode to call some key functions protected by MPU, implement behavior decision and action execution, and allocate memory resources for the next cycle. Therefore, the user code is required to call the SVC instruction into the exception handler. In exception handling, switch the execution level back to privileged mode, and replace the running stack with the main stack after exiting the exception. In addition, we can also update soft timing parameters in this mode. We describe the above workflow with Figure 8.
According to the unmanned system model in §3.1, we conclude that one of the ways to ensure the real-time performance of unmanned systems is to shorten the running time of a cycle. Therefore, we clarify the advantages of CToMP in the design goal G2 Efficiency by analyzing the computation cost of CToMP in one cycle and comparing it with the task-oriented approach. We assume that tasks need to be executed in one cycle, and the task-oriented memory protection method uses MPU to limit accessible areas for each task to prevent damage attacks caused by memory leaks. At the same time, since the tasks are all executed in unprivileged mode, and MPU can only be configured in privileged mode, each time a task is executed, it needs to go through the mode switch twice to configure MPU and stack for the next task before return to unprivileged mode. Therefore, in a task-oriented manner, the computation cost in one cycle is:
| (2) |
In Eq. (2), denotes the time cost for MPU to configure a memory area, denotes the time cost of the process stack initialization, is the time consumed in one SVC call, and is the time cost of one mode switch. These indicators’ values can be found in Table 3.
From the workflow of CToMP in Figure 8, it can be seen that since we regard all tasks in one cycle as a whole, CToMP mode only switches twice in one cycle. That is, switching to the unprivileged mode when entering a new cycle. After the cycle ends, switching to privileged mode to process sensitive data with an SVC call. What’s more, due to only protecting key code and data, the memory regions configured by MPU pre-cycle are also fewer. We suppose these memory regions are blocks. The computation cost of CToMP is as follows:
| (3) |
By comparing Eq. (2) and (3), we can obtain that the computation cost of CToMP in one cycle is much smaller than that of the task-oriented scheme, so CToMP meets design goal G2. More discussion on performance evaluation will be detailed in §4.2.2.
4 Evaluation
In this section, we first introduce the implementation and configuration details. We then evaluate the proposed approach from the following perspectives:
-
•
How effectively CToMP can compete against memory corruption attacks?
-
•
What is the performance impact of CToMP on the unmanned system?
4.1 Implementation & Configuration
We implement CToMP on CUAV V5+, a typical unmanned aerial vehicle that is full compatibility with the Pixhawk project FMUv5 design standard. CUAV V5+ is equipped with an ARM 32-bit Cortex-M7 processor, a 512KB SRAM and a 2MB Flash memory where the code and data are stored. Similar to most unmanned systems designed based on the Pixhawk standard, CUAV V5+ supports the open source firmware, Ardupilot, which uses ChibiOS as the real-time operating system. We also chose an open source drone, Crazyflie, which is equipped with an ARM 32-bit Cortex-M4 CPU, a 196KB SRAM and a 1MB Flash memory and uses FreeRTOS as the operating system. We use Crazyflie as a supplementary experiment to verify the generality of our solution. Figure 9 shows our experiment platforms and a simple ground control station (GCS) to record the flight status of our UAVs so that we can analyze the experimental results.

4.2 Study Case: CUAV V5+ with Ardupilot
4.2.1 Security Analysis
Since unmanned systems are closely related to the physical world, attacks against them tend to cause damage and loss in the real world. Similarly, MCAs in Ardupilot mainly target the key code and data stored in the memory that can affect the stable flight of drones [7]. In the following, we describe several representative attacks in detail.
Process Termination. ChibiOS, the real-time operating system in Ardupilot, provides some POSIX-like interfaces. The kill function can directly terminate the execution of tasks. We modified the return address in the stack used by the vulnerable user code, and terminated fast_loop, the core task of Ardupilot, by calling kill through return2libc. However, under the protection of CToMP , kill cannot be called outside of privileged mode, which makes it impossible for attackers to use the process stack in unprivileged mode to perform malicious jumps.
Servo Operation. The function of up_pwm_servo_set is to output the PWM waveform to control the motor speed of drones. Similar to the previous attack, this attack changed the return address to up_pwm_servo_set address, and passed two illegal parameters (channel and value) to this function, which caused motors rotating abnormally. Same as the previous one, CToMP makes up_pwm_servo_set inaccessible in unprivileged mode, thus preventing the attack.




Control Parameter Attack. PID controller is the most widely used automatic controller. It has the advantages of simple principle, easy implementation, and wide application. There are three important parameters pid_rate_roll, pid_rate_pitch, pid_rate_yaw in Ardupilot, which respectively control the roll, pitch and yaw angle of the drone aircraft attitude. After the aircraft debugging is completed, these three parameters will be fixed and written into the memory and will not change; slight changes in parameters will affect the stability of flight. In our experiment, the attack overwrote the PID control parameters by injecting malicious code while the drone was hovering in the air. The drone began to sway back and forth, left and right, gradually deviating from the original position. In our architecture, we configure these three parameters to be read-only using MPU, protecting them from tampering, then the attack will no longer work. Figure 10a - Figure 10c record the data of three angles output by IMU. It is obvious that under the protection of CToMP , the output of IMU is more stable.
Soft Timer Attack. The scheduler is an important component of unmanned systems, and it is responsible for the on-demand execution of various functional tasks. We interfered with the execution frequency of task update_altitude by modifying the two soft timer parameters ticks and last_run in the scheduler. Figure 10d shows the flight altitude recorded by the GCS in both cases when the drone is attacked and protected by CToMP . It can be seen when an attack occurs, although we increased the remote control (RC) throttle to make the drone start rising, the change of altitude is not reflected on the GCS in real-time, which undoubtedly interferes with the driver’s control of the drone, bringing a certain risk. We effectively avoid this attack by placing scheduling-related data in privileged mode that malicious code cannot access.
Memory Remapping. ARM Cortex-M series MCUs allow users to perform a hot-patching operation. This means the new program can be written into the Flash ROM, not through JTAG or USART0, but through USB, RS232, wireless transmission and other interfaces that are still preserved in the external environment after hardware packaging. The attacker can replace the existing function in Flash with the malicious code in Shellcode from the vulnerable user code, and the work of the program update should only be the responsibility of Bootloader. Therefore, in our architecture, after Bootloader starts the system, the entire code segment is configured as unwritable by MPU, making this attack ineffective.
RC Disturbance. Most tasks of unmanned systems are to sense the surrounding environment and receive control commands. In order to isolate from the kernel, we put the user code of these tasks into unprivileged mode. For the cause of facilitating the management of these sensors and communication devices, ARM Cortex-M series MCUs provide MMIO technology, which can map the registers of these devices to the peripheral area in memory. This allows tasks to mutually access data from other devices, which facilitates sensor data fusion, but attackers can exploit vulnerable code to attack some sensors across tasks. For example, by modifying the channel value of RC registers in Shellcode, the attacker can even take control of the unmanned system. In our architecture, due to the support of the randomized process stack, it is very difficult for an attacker to find the starting address of Shellcode injected through the vulnerable code, and cannot perform malicious operations.
Hard Timer Attack. All ARM Cortex-M series MCUs have a 24-bit system timer, SysTick. This timer counts down from the reload value (SYST_RVR) to zero, providing the unmanned system with a microsecond-accurate system clock. Through this clock, the unmanned system can count the execution time of tasks in each cycle and schedule tasks efficiently. In the absence of memory isolation, an attacker can slow down the system time by overwriting the value of SYST_RVR, which will seriously affect the task scheduling of unmanned systems. Since SysTick is a private peripheral in MCUs, its SYST_RVR can only be reloaded in privileged mode. In our architecture, vulnerable user code in unprivileged mode cannot be exploited to attack the hard timer.
Interrupt Vector Overriding. The NVIC supports 1 to 240 interrupts for each task in unmanned systems. Tasks can be configured with a priority in the range of 0-255, and this information is stored in a vector table. By replacing the priorities in the original vector table and increasing the priority of some tasks, the attack can make some unimportant tasks always be called in each cycle, which will inevitably waste software and hardware resources. However, like the hard timer attack, the NVIC is also a private peripheral, so this attack cannot be implemented in our architecture.
4.2.2 Performance Evaluation

In order to measure the impact of new security features on the real-time performance of unmanned systems, some relevant works in recent years are based on the time of task execution. They believe that as long as tasks are completed within the maximum executable time, it will not affect the real-time performance of unmanned systems. However, according to our analysis of some existing unmanned system firmware, we found that the initial-setup maximum executable time of these tasks is inaccurate, and they will change dynamically during the operation of unmanned systems to improve the scheduling efficiency. This is why we found that the relevant works have problems with some complex unmanned systems, such as Ardupilot. The maximum executable time is not an accurate measure of whether the functionality of the task is affected.
According to the operation model of unmanned systems in §2.1, we believe that a task needs to achieve a certain execution frequency to meet its functional requirement. Failure to reach the execution frequency will affect the real-time performance of unmanned systems, such as perception delay and command delay, which will directly affect the safety of unmanned systems. Therefore, we choose task execution frequency as an indicator to measure the performance impact of security features on unmanned systems. As demonstrated in Figure 11, we can see that our approach brings little system overhead. None of the task execution frequency is affected under the protection of CToMP , enabling the protected system to reach the same operation efficiency as the original system In the framework of relevant work MINION, many low-priority tasks are affected by the frequent configuration of MPU and cannot be executed in a cycle, and the desired execution frequency cannot be achieved. Therefore, the effect of CToMP on the efficiency of Ardupilot is completely acceptable.
At the same time, we noticed that randomizing memory allocation can lead to memory fragmentation issues. This causes a large number of address conflicts in memory allocation, and multiple memory reallocations will consume more time. We tried the simplest solution, which is to arrange the memory regions that need to be allocated in order of size. We found that allocating memory from large to small (Figure 12b) can improve the efficiency by 26.5% than allocating memory from small to large (Figure 12a). The time of memory allocation also can be accepted.


4.3 Study Case: Crazyflie
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/8a81817b-60d1-46dc-9c8c-dd9d33109c85/x17.png)
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/8a81817b-60d1-46dc-9c8c-dd9d33109c85/x18.png)
To illustrate the generality of CToMP , we validate it on another unmanned system, Crazyflie. Since Crzayflie uses the relatively low-end STM32F405 as the MCU, it needs more efficient security functions. There are two main missions in Crazyflie, STABILIZER and SENSORS. STABILIZER is mainly responsible for the attitude control of drones, while SENSORS is used to collect data from sensors such as gyroscopes and accelerometers. At the same time, there is also a Crazy RealTime Protocol (CRTP) service for data communication with the control side.
Similar to Ardupilot, attackers can exploit vulnerabilities111https://forum.bitcraze.io/viewtopic.php?t=2063222https://forum.bitcraze.io/viewtopic.php?t=4923 in the firmware to inject Shellcode. Therefore, in CToMP , we use MPU to put STABILIZER into privileged mode, which is isolated from other user codes that can interact with the outside world. This can effectively protect the attitude control of drones from being interfered with the malicious code. Unlike Ardupilot, where multiple tasks can use the same process stack, the operating system FreeRTOS in Crazyflie uses xTaskCreate to allocate a fixed stack for each task in RAM, and makes the PSP point to the corresponding stack when the task is scheduled, as illustrated in Figure 14. This eliminates the need to build a memory pool, but only needs to randomly change the stack address of each task in RAM in each cycle. We also tested the effect of CToMP on the real-time performance of Crazyflie, as shown in Figure 14. In the experiments, the execution frequency of Crazyflie tasks was not affected by CToMP .
5 Related Work
Since the unmanned system is a typical embedded system, the security research of embedded systems also inspires our research.
MCAs in Embedded Systems. Although the existing technology strictly checks the integrity of the embedded software, monitoring methods for executing embedded system programs are not widely used because of resource constraints [38]; hence, some attacks can cause memory corruption during runtime, such as stack/buffer overflow attacks and code reuse attacks [39]. In particular, memory overflow attacks have been one of the most mainstream methods to date [40, 41, 42], because in the most commonly used embedded program language CC++, some functions dealing with buffer data lack a boundary detection mechanism, e.g., strcpy(), or because of unavoidable programmer negligence. These attacks have always been difficult to solve, and several vulnerabilities related to memory overflow attacks are reported in CVE every day. These vulnerabilities are distributed in the firmware of embedded devices that have been released, such as routers of various brands (TP-LINK333https://cve.mitre.org/cgi-bin/cvename.cgi?name=CVE-2021-44632444https://cve.mitre.org/cgi-bin/cvename.cgi?name=CVE-2022-25074, NETGEAR555https://cve.mitre.org/cgi-bin/cvename.cgi?name=CVE-2021-45524), webcams666https://cve.mitre.org/cgi-bin/cvename.cgi?name=CVE-2021-33549, and even in the ARM official dependency library, which contains an unsafe function encode_ise()777https://cve.mitre.org/cgi-bin/cvename.cgi?name=CVE-2021-44331. These vulnerabilities allow unauthenticated attackers to remotely execute arbitrary code, causing severe losses. Furthermore, although few vulnerability reports are available for the UAV real-time system, after analyzing 596 bugs submitted on github.com in two types of open-source flight control software, Ardupilot and PX4, Wang et al. [43] found that hackers can exploit some bugs to launch security attacks. In Hooper and Tian’s research [16], a buffer overflow bug was used to force a small commercial drone Parrot to land without cracking the Wi-Fi password used for control communication. Consequently, designing a general memory protection scheme is necessary in embedded real-time systems.
Memory Protection in Embedded Systems. To resist the damage caused by MCAs, the most effective approach is to establish a memory management mechanism to partition the memory usage region of the embedded system. Some works [44, 45, 46, 47, 48] use MMU in general-purpose computing systems for reference to dividing the embedded system memory into blocks and realize dynamic memory allocation. However, these schemes have considerable limitations in actual engineering applications. For example, malloc function is also implemented in Ardupilot, but it only provides three fixed regions for memory allocation.
In addition, there are some frameworks [15, 14, 13, 9] that implement access control to embedded system memory from the perspective of authority management. MINION [14] and M2MON [15] are two memory protection architectures based on STM32 series chips and are applied to Ardupilot. They use MPU to limit the memory-accessible range of tasks’ user code that may be hacked by unauthorized users and protect sensitive data from malicious modification through memory corruption vulnerabilities. However, with the update of unmanned systems, the functions supported by drones gradually increased, and the performance of these task-oriented solutions declined. In some other low-cost platforms, such as Arduino Yun based on the AVR architecture, Sergio et al. [9] proposed to use an XOR-based encryption and a liner PRNG to protect the confidentiality of private metadata. However, this work is not universal and representative because of the platform specificity of this solution. Additionally, we also noticed that to prevent code-reuse attacks (return2libc attacks), [9] and [49] used Address Space Layout Randomization (ASLR) technology. However, their approaches can only randomize the code address once during firmware burning or program startup. In contrast, CToMP randomizes the stack address when each cycle begins so that the stack address will be different in each cycle, considerably increasing the difficulty of analyzing memory corruption vulnerabilities for attackers. Hence, it prevents return2shellcode attacks.
ARM TrustZone Security. The initial stage of TrustZone [50] is a security architecture proposed for high-performance Cortex-A processors. Recently, low-power Cortex-M33 series MCUs have also begun to support TrustZone [51], and STM32L5 [52] is an earlier chip to cover this feature, but it is not widely used. However, similar to the switching of execution levels in our system architecture, TrustZone technology in Cortex-M33 divides the secure world and normal world through memory mapping and uses an exception handler to achieve transitions [53, 54]. In the future, we can adapt CToMP into the secure world of TrustZone to complete the management of memory resources in the trusted environment.
6 Conclusion
With the widespread use of unmanned systems, the security issues they conceal have gradually gained people’s attention. In this paper, we seek to tackle memory corruption attacks (MCAs), which inject malicious code through memory vulnerabilities and tamper with critical kernel instructions or data in memory.
To achieve this goal, we propose a cycle-task-oriented memory protection (CToMP) approach. By analyzing and testing with various typical attack interfaces, we found that CToMP is resilient to different types of MCAs, and it will not affect the efficiency of unmanned systems. To summarize, CToMP is an efficient and dependable memory protection mechanism that can meet the requirements of unmanned systems for velocity, practicality, and reliability simultaneously. Our source code is available on GitHub: https://github.com/xidian-uav/uav_memory_isolation.
This work was supported by the National Natural Science Foundation of China (Key Program 62232013), the Fundamental Research Funds for the Central Universities (Nos. ZYTS23202 and YJSJ23007), and the Major Research Plan of the National Natural Science Foundation of China (Grant No. 92267204). We also thank anonymous reviewers and editors for their comments and guidance.
References
- [1] Stankovic J A. Real-Time and Embedded Systems. ACM Comput Surv, 1996, 28: 205-208
- [2] Tomic T, Schmid K, Lutz P, et al. Toward a Fully Autonomous UAV: Research Platform for Indoor and Outdoor Urban Search and Rescue. IEEE Robot Autom Mag, 2012, 19: 46-56
- [3] Messina G, Modica G. Applications of UAV Thermal Imagery in Precision Agriculture: State of the Art and Future Research Outlook. Remote Sensing, 2020, 12: 9
- [4] Chai H X, Zhang G X, Zhou J L, et al. A short review of security-aware techniques in real-time embedded systems. J Circuit Syst Comp, 2019, 28: 2
- [5] Zhi Y Y, Fu Z J, Sun X M, et al. Security and privacy issues of UAV: a survey. Mobile Netw Appl, 2020, 25: 95-101
- [6] Leccadito M, Bakker T, Klenke R, et al. A survey on securing UAS cyber physical systems. IEEE Aero El Sys Mag, 2018, 33: 22-32
- [7] Fei F, Tu Z, Yu R, et al. Cross-Layer Retrofitting of UAVs Against Cyber-Physical Attacks. In: 2018 IEEE International Conference on Robotics and Automation (ICRA), 2018
- [8] Xiao M B, Wang X D, Yang G S. Cross-Layer Design for the Security of Wireless Sensor Networks. In: 2006 6th World Congress on Intelligent Control and Automation, 2006. 104-108
- [9] Pastrana S, Tapiador J, Suarez-Tangil G, et al. AVRAND: A Software-Based Defense Against Code Reuse Attacks for AVR Embedded Devices. In: Proceedings of the 13th International Conference on Detection of Intrusions and Malware, and Vulnerability Assessment (DIMVA), 2016. 58-77
- [10] Niesler C, Surminski S, Davi L. HERA: Hotpatching of Embedded Real-time Applications. In: 28th Annual Network and Distributed System Security Symposium (NDSS), 2021
- [11] Bai J, Li T, Lu K J, et al. Static Detection of Unsafe DMA Accesses in Device Drivers. In: 30th USENIX Security Symposium (USENIX Security 21), 2021. 1629-1645
- [12] Regalado D, Harris S, Harper A, et al. Gray Hat Hacking The Ethical Hacker’s Handbook, Fourth Edition. McGraw-Hill Education, 2015
- [13] Koeberl P, Schulz S, Sadeghi A, et al. TrustLite: A Security Architecture for Tiny Embedded Devices. In: Proceedings of the Ninth European Conference on Computer Systems (EuroSys ’14), 2014
- [14] Kim C H, Kim T, Choi H, et al. Securing Real-Time Microcontroller Systems through Customized Memory View Switching. In: 25th Annual Network and Distributed System Security Symposium (NDSS), 2018
- [15] Khan A, Kim H, Lee B, et al. M2MON: Building an MMIO-based Security Reference Monitor for Unmanned Vehicles. In: 30th USENIX Security Symposium (USENIX Security 21), 2021
- [16] Hooper M, Tian Y F, Zhou R X, et al. Securing commercial WiFi-based UAVs from common security attacks. In: 2016 IEEE Military Communications Conference (MILCOM 2016), 2016. 1213-1218
- [17] Wang J W, Li A, Li H R, et al. RT-TEE: Real-time System Availability for Cyber-physical Systems using ARM TrustZone. In: 2022 IEEE Symposium on Security and Privacy (SP), 2022. 352-369
- [18] Hardin T, Scott R, Proctor P, et al. Application Memory Isolation on Ultra-Low-Power MCUs. In: 2018 USENIX Annual Technical Conference (USENIX ATC 18), 2018. 127-132
- [19] Lattner C, Adve V. LLVM: a compilation framework for lifelong program analysis & transformation. In: International Symposium on Code Generation and Optimization (CGO), 2004. 75-86
- [20] STMicroelectronics. STM32F7 Series and STM32H7 Series Cortex®-M7 processor Programming Manual. 2019
- [21] STMicroelectronics. Introduction to STM32 microcontrollers security. 2021
- [22] Shacham H. The Geometry of Innocent Flesh on the Bone: Return-into-Libc without Function Calls (on the X86). In: Proceedings of the 14th ACM Conference on Computer and Communications Security (CCS 07), 2007. 552–561
- [23] Roemer R, Buchanan E, Shacham H, et al. Return-Oriented Programming: Systems, Languages, and Applications. ACM Trans Inf Syst Secur, 2012, 15: 1
- [24] Mouzarani M, Sadeghiyan B, Zolfaghari M. Smart fuzzing method for detecting stack-based buffer overflow in binary codes. IET Softw, 2016, 10: 96-107
- [25] Rawat S, Mounier L. Offset-Aware Mutation Based Fuzzing for Buffer Overflow Vulnerabilities: Few Preliminary Results. In: 2011 IEEE Fourth International Conference on Software Testing, Verification and Validation Workshops, 2011. 531-533
- [26] Mouzarani M, Sadeghiyan B, Zolfaghari M. A Smart Fuzzing Method for Detecting Heap-Based Buffer Overflow in Executable Codes. In: 2015 IEEE 21st Pacific Rim International Symposium on Dependable Computing (PRDC), 2015. 42-49
- [27] Redini N, Machiry A, Wang R Y, et al. Karonte: Detecting Insecure Multi-binary Interactions in Embedded Firmware. In: 2020 IEEE Symposium on Security and Privacy (SP), 2020
- [28] Costin A, Zarras A, Francillon A. Automated Dynamic Firmware Analysis at Scale: A Case Study on Embedded Web Interfaces. In: Proceedings of the 11th ACM on Asia Conference on Computer and Communications Security (ASIA CCS ’16), 2016. 437–448
- [29] David Y, Partush N, Yahav E. FirmUp: Precise Static Detection of Common Vulnerabilities in Firmware. SIGPLAN Not, 2018, 53: 392–404
- [30] Qasem A, Shirani P, Debbabi M, et al. Automatic Vulnerability Detection in Embedded Devices and Firmware: Survey and Layered Taxonomies. ACM Comput Surv, 2021, 54: 2
- [31] Wright C, Moeglein W A, Bagchi S, et al. Challenges in Firmware Re-Hosting, Emulation, and Analysis. ACM Comput Surv, 2021, 54: 1
- [32] Clements A A, Gustafson E, Scharnowski T, et al. HALucinator: Firmware Re-hosting Through Abstraction Layer Emulation. In: 29th USENIX Security Symposium (USENIX Security 20), 2020
- [33] Gustafson E, Muench M, Spensky C, et al. Toward the Analysis of Embedded Firmware through Automated Re-hosting. In: 22nd International Symposium on Research in Attacks, Intrusions and Defenses (RAID 2019), 2019
- [34] Johnson E, Bland M, Zhu Y F, et al. Jetset: Targeted Firmware Rehosting for Embedded Systems. In: 30th USENIX Security Symposium (USENIX Security 21), 2021
- [35] Han R D, Yang C, Ma S Q, et al. Control Parameters Considered Harmful: Detecting Range Specification Bugs in Drone Configuration Modules via Learning-Guided Search. In: Proceedings of the 44th International Conference on Software Engineering (ICSE ’22), 2022. 462–473
- [36] Kim H, Lee J, Pratama D, et al. RIMI: Instruction-Level Memory Isolation for Embedded Systems on RISC-V. In: Proceedings of the 39th International Conference on Computer-Aided Design (ICCAD ’20), 2020
- [37] STMicroelectronics. STM32F76xxx and STM32F77xxx advanced Arm®-based 32-bit MCUs Reference Manual. 2018
- [38] Wang W K, Liu M Y, Du P, et al. An Architectural-Enhanced Secure Embedded System with a Novel Hybrid Search Scheme. In: 2017 International Conference on Software Security and Assurance (ICSSA), 2017. 116-120
- [39] Das S, Zhang W, Liu Y. A Fine-Grained Control Flow Integrity Approach Against Runtime Memory Attacks for Embedded Systems. IEEE Trans VLSI Syst, 2016, 24: 3193-3207
- [40] Mullen G, Meany L. Assessment of Buffer Overflow Based Attacks On an IoT Operating System. In: 2019 Global IoT Summit (GIoTS), 2019. 1-6
- [41] Rajendran G, Nivash R. Security in the Embedded System: Attacks and Countermeasures. In: Proceedings of International Conference on Recent Trends in Computing, Communication & Networking Technologies (ICRTCCNT), 2019
- [42] Xu B, Wang W K, Hao Q, et al. A Security Design for the Detecting of Buffer Overflow Attacks in IoT Device. IEEE Access, 2018, 6: 72862-72869
- [43] Wang D H, Li S Q, Xiao G P, et al. An Exploratory Study of Autopilot Software Bugs in Unmanned Aerial Vehicles. In: Proceedings of the 29th ACM Joint Meeting on European Software Engineering Conference and Symposium on the Foundations of Software Engineering, 2021. 20-31
- [44] Bai L S, Yang L, Dick R P. MEMMU: Memory Expansion for MMU-Less Embedded Systems. ACM Trans Embed Comput Syst, 2009, 8: 3
- [45] Bukkapatnam K, Prashant, Rekha C K, et al. Smart Memory Management (SaMM) For Embedded Systems without MMU. In: International Conference on Recent Advancements in Engineering and Management (ICRAEM-2020), 2020. 3
- [46] Cheng X H, Gong Y M, Wang X Z. Study of Embedded Operating System Memory Management. In: 2009 First International Workshop on Education Technology and Computer Science, 2009. 962-965
- [47] Deligiannis I, Kornaros G. Adaptive memory management scheme for MMU-less embedded systems. In: 2016 11th IEEE Symposium on Industrial Embedded Systems (SIES), 2016. 1-8
- [48] Yu Y H, Wang J Z, Sun T Y. A Novel Defragmemtable Memory Allocating Schema for MMU-Less Embedded System. In: Advances in Intelligent Systems and Applications - Volume 2, 2013
- [49] Salehi M, Hughes D, Crispo B. MicroGuard: Securing Bare-Metal Microcontrollers against Code-Reuse Attacks. In: 2019 IEEE Conference on Dependable and Secure Computing (DSC), 2019. 1-8
- [50] ARM Ltd. ARM Security Technology - Building a Secure System using TrustZone Technology. 2009
- [51] ARM Ltd. Introduction to the ARMv8-M architecture. Version 2.0. 2017
- [52] STMicroelectronics. STM32L552xx and STM32L562xx advanced Arm®-based 32-bit MCUs Reference Manual. 2020
- [53] Azab A M, Ning P, Shah J, et al. Hypervision Across Worlds: Real-Time Kernel Protection from the ARM TrustZone Secure World. In: Proceedings of the 2014 ACM SIGSAC Conference on Computer and Communications Security (CCS ’14), 2014. 90–102
- [54] Pinto S, Santos N. Demystifying Arm TrustZone: A Comprehensive Survey. ACM Comput Surv, 2019, 51: 6