Conservative nonconforming virtual element method for stationary incompressible magnetohydrodynamics ††thanks: .
Abstract
In this paper, we propose a conservative nonconforming virtual element method for the full stationary incompressible magnetohydrodynamics model. We leverage the virtual element satisfactory divergence-free property to ensure mass conservation for the velocity field. The condition of the well-posedness of the proposed method, as well as the stability are derived. We establish optimal error estimates in the discrete energy norm for both the velocity and magnetic field. Furthermore, by employing a new technique, we obtain the optimal error estimates in -norm without any additional conditions. Finally, numerical experiments are presented to validate the theoretical analysis. In the implementation process, we adopt the effective Oseen iteration to handle the nonlinear system.
Keywords: Virtual element method; Stationary incompressible magnetohydrodynamics; error estimates; Polygonal meshes
1 Introduction
Incompressible magnetohydrodynamics (MHD) equations, coupled by multiple physical fields, model the interaction between conducting fluid and an external magnetic field. MHD equations are significant in the regions of physics and engineering, such as cooling of liquid metal in nuclear reactors, confinement for controlled thermonuclear fusion, magnetic fluid motors and the propagation of radio waves in the ionosphere [19, 15].
In the last decades, there has been a lot of research on numerical solutions of incompressible MHD equations (see [21, 19, 20, 22, 25, 18, 17, 24, 23, 31] and the references therein). Regarding handling of nonlinear terms, the classic finite element iterative methods were designed in [18, 17]. In the most mixed finite element methods, the divergence-free restriction is imposed in the weak sense and the numerical solutions violate the physical properties. The divergence-free methods have been received widely attention for incompressible MHD equations. A mixed finite element method [20] (FEM) and three interior penalty discontinuous Galerkin (DG) methods [25] for incompressible MHD were developed, with preserving exactly divergence-free velocity. Literatures [24, 23] studied structure-preserving FEMs of MHD. Moreover, a fully divergence-free FEM for MHD was proposed in [22], where the magnetic field is approximated by a magnetic vector potential.
Virtual element method (VEM), introduced with one of the simplest examples in [5, 6], is a recent technique for numerical approximation of partial differential equations and is regarded as the extension of classic FEM onto polygonal/polyhedral meshes. VEM does not require that shape functions on element are explicitly constructed, but the discrete algebraic systems can be obtained by using the degrees of freedom. An arbitrary order nonconforming virtual element was presented and applied to the Poisson equation [16] and the Stokes equations [12, 28]. The literature [8] designed an -conforming Stokes-type virtual element such that the associated discrete kernel is divergence-free. In [4, 1], the stream virtual element formulations were studied by using a suitable stream function space to approximate velocity. Piecewise divergence-free nonconforming virtual elements for Stokes problem in any dimensions were investigated in [32]. Based on the de Rham complex, the reference [35] constructed a nonconforming virtual element for Stokes problem, which is piecewise divergence-free in discrete kernel. When utilizing the virtual element proposed in [35] to solve the Navier-Stokes equations, to ensure that the constructed discrete VEM scheme achieves optimal convergence with suitable precision, the computable -projection onto the polynomials of degree is required. In order to calculate -projection, the enhanced version based on the nonconforming virtual element [35] was presented in [34] for the Navier-Stokes equations. In order to derive optimal convergence with suitable precision, the enhanced version of the -conforming virtual element proposed in [5] was investigated in [2] for the reaction-diffusion problems. VEM has additionally been used to solve the resistive MHD model [3, 7].
Motivated by [3, 7], we consider a nonconforming VEM for the 2D full stationary incompressible MHD equations. Compared to the work in [3, 7], our research has two main differences: first, the model discussed here is more complex than the resistive MHD; second, the study in [3, 7] focuses on low-order virtual elements, while we develop an arbitrary order () scheme on shape-regular polygonal meshes. For keeping mass conservation, the velocity and the pressure are approximated by the enhanced nonconforming virtual element space and discontinuous piecewise polynomials. The discrete velocity is piecewise divergence-free. Each component of the magnetic field is approximated by the enhanced -conforming virtual element space. The treatment approaches for the bilinear term related to the magnetic field and the complex trilinear terms are provided. We prove the stability of the discrete formulation and establish conditions for uniqueness of the solution. Additionally, we derive optimal error estimates in the discrete energy norm and -norm for both velocity and magnetic field, as well as in the -norm for the pressure.
The rest of the paper is organized as follows. In Section 2, we briefly introduce some basis notations, the full stationary incompressible MHD equations and the weak formulation. In Section 3, we present the approximate spaces of the velocity, the magnetic field and the pressure, the virtual element discretizations of the MHD equations and the stability of the discrete formulation. In Section 4, the optimal error estimates are derived. Section 5 shows some numerical experiments to validate the theoretical analysis.
2 Preliminaries
Let be a bounded convex polygonal domain. We denote a two-dimensional variable by , where and . We use to represent the unit outward normal vector of . For any polygonal subdomain of , the unit outward normal vector of (edge of ) is denoted . We adopt to express the set of polynomials on of degree at most , here can be , or edge , specially . There exists a direct sum decomposition
For scalar function and vector functions , , we introduce the cross product and operators
We define some useful spaces as follows:
Let be the standard Sobolev space equipped with norm and seminorm . In particular, is Lebesgue space with norm , is Hilbertian space with norm and seminorm . is usual -inner product. If , the subscript of norm, seminorm and inner product will be omitted.
We consider the two-dimensional full stationary incompressible MHD [21]:
| (2.1) |
where are the velocity, the magnetic field and the pressure, respectively. Hydrodynamic Reynolds number , magnetic Reynolds number and coupling coefficient are the physical parameters of the equations. Functions and are source terms.
Like in [21], the weak formulation of problem (2.1) is as follows: , find such that
| (2.2) |
According to the Proposition 3.1 in [21], we know that can be derived from (2.2). Problem (2.2) can be rewritten as follows: find such that
| (2.3) |
where, ,
For the sake of convenience, some norms are defined by
and . We use the equivalent norm to replace for all . From [14], it know that
| (2.4) |
Here and after, are positive constants independent of mesh size.
3 Virtual element method
3.1 Meshes and projections
Let be a family of partitions of into convex polygons and be diameter of element , be the largest of all diameters, represent the set of edges of . For each element , we have mesh regular assumptions that there exists a positive constant satisfying:
(A1) is star-shaped with respect to a ball of radius .
(A2) The distance between any two vertexes of is .
For an internal edge , which is a shared edge of elements and of , we define the jump of by , specially, for boundary edge , .
We introduce some useful projections as follows:
-
1.
-seminorm projection : , defined by
(3.1) -
2.
-projection : , defined by
(3.2)
3.2 The nonconforming element space and piecewise polynomials space
We use the enhanced nonconforming virtual element [34] to approximate the velocity. In order to describe it, we first introduce two auxiliary spaces. One space is
| (3.3) |
From [35], we know that the following direct sum decomposition holds
| (3.4) |
where and are
The other space is
From Lemma 3.1 in [34], it is easy to see that
| (3.5) |
Then, the local space is defined by
| (3.6) |
where , is the barycenter of . Obviously, . The degrees of freedom of are
| (3.7) | |||
| (3.8) |
It is not difficult for us to find that the projection can be computed by using integration by parts and (3.7)-(3.8). According to the definition of , we know that for all and the expression of on element can be calculated by
| (3.9) |
The first term on the right-hand side of (3.9) can be computed by (3.8). The second term is computable, since and its expression can be uniquely determined by (3.6)-(3.8). For all , there holds
| (3.10) |
where , . Similar to the previous discussion, the right-hand side of (3.10) can be calculated by (3.7)-(3.8). Thus, the projection is computable.
We define -projection : by
| (3.11) |
Indeed, the right-hand side of (3.11) can be calculated by integration by parts and (3.7)-(3.8). As a result, the projection is computable. With the above preparation, the global space is defined as
| (3.12) |
Lemma 3.1
([34]) Let with , be its degrees of freedom interpolation. Then, it holds that
Throughout this article, denotes a generic positive constant independent of , and might be different value at each occurrence.
As the usual framework of VEM, we define a computable local bilinear form by
where is a symmetric and positive definite bilinear form such that
for two positive constants and independent of and . The definition of and (3.1) imply
-
•
-consistency: for all and ,
(3.13) -
•
stability: there exist two positive constants and , independent of and , satisfying
(3.14)
The pressure is approximated by discontinuous piecewise polynomials, which is defined as
Let , be the -projection of onto , then , there holds
| (3.15) |
3.3 The nodal space
In order to compute the -projection onto polynomials of degree , we use the enhanced -conforming virtual element [2] to approximate each component of the magnetic field. First of all, we introduce a auxiliary space
| (3.16) |
Then, the local enhanced space is defined as
| (3.17) |
with the degrees of freedom
| (3.18) | |||
| (3.19) | |||
| (3.20) |
It is obvious that the projection can be computed by (3.18)-(3.20). From (3.20) and (3.17), we know that the projection is computable. We define -projection : by
| (3.21) |
According to integration by parts and (3.18)-(3.20), it is easy to see that the projection is computable. Likewise, the projection can be calculated.
The global space is defined as
| (3.22) |
Lemma 3.2
([11]) Let with , be its degrees of freedom interpolation. Then, it holds that
We define a computable local bilinear form by
where is a symmetric and positive definite bilinear form satisfying
for two positive constants and independent of and .
Lemma 3.3
The local bilinear form satisfies the following properties
-
•
-consistency: for all and ,
(3.23) -
•
stability: there exist two positive constants and , independent of and , such that
(3.24)
Proof. It is clear that (3.23) holds. For the stability, we need to prove that for all ,
where is an identity operator. Making use of the properties of -projection, we have
which is the desired result of the first inequality. Similarly, the second inequality can be derived. Thus, there hold
The proof is completed. ∎
3.4 The discrete formulation
The virtual element formulation of the problem (2.3): , find such that
| (3.25) |
where, ,
Obviously, the linear form is antisymmetric, i.e.
According to the definition of , it is easy to know that for any , where . The discrete kernel space is defined as
Due to the discrete velocity , then is piecewise divergence-free. We define some norms
There are some useful inequalities
| (3.26) | ||||
| (3.27) | ||||
| (3.28) | ||||
| (3.29) |
where is a positive integer. By using Inverse inequality of polynomials, the properties of -projection and Hlder inequality, we obtain (3.26). The proof of (3.27), see Lemma 0.1 of Appendix in [34]. It is widely known that (3.28) holds. The inequality (3.29) can be found in [9].
Lemma 3.4
For any , there hold
| (3.30) | |||
| (3.31) | |||
| (3.32) |
where , is a constant independent of .
Proof. By Cauchy-Schwarz inequality and stabilities (3.14) and (3.24), we infer
Analogously, we get (3.31). Using (3.26) and (3.27) yields
| (3.33) |
Similarly, we can obtain
| (3.34) |
Combining (3.33)-(3.34), we derive (3.32). The proof is finished. ∎
Lemma 3.5
There exists a constant independent of such that
| (3.35) |
Proof. According to triangle inequality and Lemma 3.1, it is not difficult to find that for all , where is a positive constant independent of . From the definition of interpolation (see [34]) and the standard arguments in [14], for any , we have
∎
Lemma 3.6
([10]) Let , , there exists a polynomial such that
Theorem 3.1
4 Error analysis
Lemma 4.1
Under assumptions (A1) and (A2), suppose , , and , for every , there hold
Proof. Similar to Lemma 4.3 in [9], with just a few modifications, the first inequality of Lemma 4.1 can be derived. According to the properties of -projection, Hlder inequality and (3.26)-(3.29), we have
Similarly, we observe that
By the antisymmetric of the linear form , we conclude that
Applying (3.32), the proof is completed. ∎
Lemma 4.2
Under assumptions (A1) and (A2), let and , for every , we can get
where
Theorem 4.1
Under assumptions (A1), (A2) and (3.36), let and be solutions of (2.3) and (3.25), respectively. Then, the following estimates hold
| (4.1) | ||||
| (4.2) |
Proof. According to the definition of interpolation, which implies that and have the same degrees of freedom, we observe that if , then . Multiplying the first and second equations in (2.1) by test functions and , respectively, then using integration by parts, we deduce
| (4.3) |
Subtracting (4.3) from (3.25), taking and using the fact , we derive
| (4.4) |
Applying triangle inequality, (3.30), Lemmas 3.1, 3.2 and 3.6, we obtain
| (4.5) |
Using Lemma 4.1, we have
| (4.6) | ||||
| (4.7) |
From the properties of -projection, we know that
| (4.8) |
Applying Lemma 4.2, it is easy to see that
| (4.9) |
Substituting (4.5)-(4.9) into (4.4) and using (3.31), we infer
| (4.10) |
By (4.10), assumption (3.36) and triangle inequality, we can derive (4.1).
Substacting (4.3) from (3.25), taking , we obtain
| (4.11) |
Similar to the estimates of the terms , there hold
| (4.12) | ||||
| (4.13) | ||||
| (4.14) | ||||
| (4.15) |
For the estimate of the term , we observe that
| (4.16) |
Combining (4.12)-(4.16) and using (4.1), we conclude that
| (4.17) |
Applying the discrete inf-sup condition (3.35) yields
which implies
By triangle inequality and (3.15), we get (4.2). The proof is completed. ∎
For -norm of error, we consider the following dual problem, see [21, 26].
| (4.18) |
where represents the normal transpose. We assume that the solution of (4.18) satisfies and there exists a constant such that
| (4.19) |
Theorem 4.2
Proof. Multiplying (4.18) by test functions and , then adding (3.25) and substracting (4.3), with , we deduce
| (4.20) |
where . Applying Lemmas 3.1-3.2 and (4.19), we get
| (4.21) |
Making use of consistencies (3.13), (3.23), triangle inequality and (4.19), we obtain
| (4.22) |
From Lemmas 3.4, 4.1, 3.1, 3.2 and (4.19), we observe that
| (4.23) |
Utilizing (3.32), Lemmas 3.1-3.2 and (4.19), we derive
| (4.24) |
The term can be rewritten as
| (4.25) |
Here, we only provide the estimates of and , because the estimate of is analogous to and . Similar to the proof of Theorem 4.7 in [27], the term can be split as
| (4.26) |
From Lemma 3.6, (2.4) and (4.19), we get
| (4.27) |
Using (3.29), Lemma 3.6, (2.4) and (4.19), we arrive at
| (4.28) |
Obviously, it is easy to know that
| (4.29) |
Applying (3.26), Lemma 3.6, (2.4) and (4.19), we deduce
| (4.30) |
Similar to (4.27)-(4.30), we have
| (4.31) | ||||
| (4.32) | ||||
| (4.33) |
Combining (4.27)-(4.33), we derive
| (4.34) |
Analogously, by adding and subtracting terms, the term can be written as
| (4.35) |
Similar to (4.27)-(4.33), we deduce
| (4.36) |
Substituting (4.36) into (4.35) yields
| (4.37) |
By the same way, following estimate can be derived
| (4.38) |
According to the properties of -projection and triangle inequality, we find
| (4.39) |
Using Lemmas 4.2, 3.1 and (4.19), the estimate of the term is as follows:
| (4.40) |
Combining (4.21)-(4.24), (4.34) and (4.37)-(4.40) and using Theorem 4.1, we obtain
The proof is finished. ∎
5 Numerical examples
In this section, we first introduce a fixed-point algorithm (Oseen iteration) for the handing of nonlinear problems. Next, by the Example 5.1, we verify the convergence rates of the proposed nonconforming VEM for the cases , and compare the nonconforming VEM, the conforming VEM and the FEM for the case . The above conforming VEM only changes the approximation space of the velocity compared with the nonconforming VEM, the velocity is approximate by the low-order Stokes-type virtual element [30]. For the FEM, the stable finite element pair is used for discretization. For both the VEM and FEM, we adopt Oseen iteration to deal with nonlinear system. The Oseen iteration scheme of the VEM is as follows:
with the iterative initial value , the iterative tolerance is 1e-7. The Oseen iteration of the FEM can be found in [18]. Then, in Example 5.2, we investigate a benchmark problem. All experiments are implemented with FEALPy package [33].
In order to compute VEM errors, we consider the following computable error quantities:
For the choice of the stabilization terms , we follow [34, 2]
where is the th degree of freedom of smooth enough function to the space , here is or . Of course, the choice is not unique, there are also some other options [29, 11, 13].
Example 5.1
We consider solving MHD with on domain . The source terms and satisfy the exact solutions
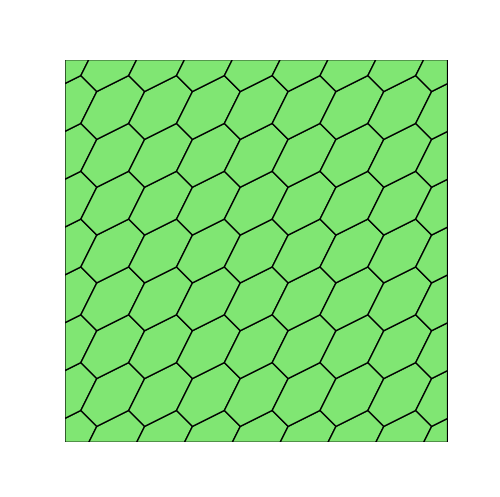
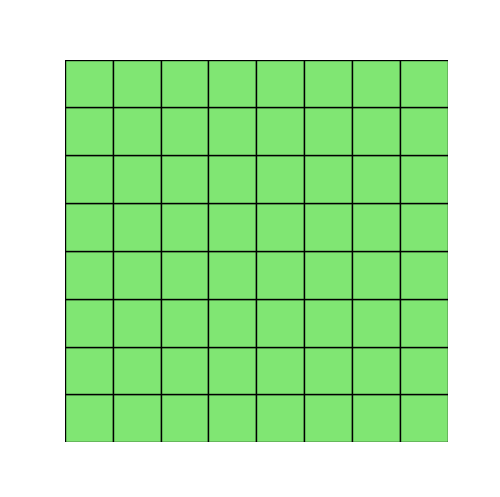
In Table 1, we list the errors and the optimal convergence rates of the velocity on meshes and (see Figure 1) for the cases , as well as -norm of . We observe that the discrete velocity is divergence-free up to machine precision. Table 2 displays the errors and the optimal convergence rates of the magnetic and pressure on meshes and for the cases . Tables 1 and 2 illustrate validity of the theoretical analysis.
| meshes | Rate | Rate | |||||
|---|---|---|---|---|---|---|---|
| 1 | 0.3727 | 7.9642e-02 | - | 1.4316e+00 | - | 1.8392e-15 | |
| 0.1863 | 2.7525e-02 | 1.53 | 7.0057e-01 | 1.03 | 3.6925e-15 | ||
| 0.0932 | 7.8488e-03 | 1.81 | 3.3440e-01 | 1.07 | 2.7869e-15 | ||
| 0.0466 | 2.0667e-03 | 1.93 | 1.6374e-01 | 1.03 | 1.1629e-14 | ||
| 0.0233 | 5.2739e-04 | 1.97 | 8.1386e-02 | 1.01 | 4.7360e-14 | ||
| 2 | 0.3727 | 2.8702e-02 | - | 1.4227e+00 | - | 6.2575e-15 | |
| 0.1863 | 3.7358e-03 | 2.94 | 5.5399e-01 | 1.36 | 1.1871e-14 | ||
| 0.0932 | 4.2119e-04 | 3.15 | 1.5298e-01 | 1.86 | 2.5457e-14 | ||
| 0.0466 | 4.4875e-05 | 3.23 | 3.9484e-02 | 1.95 | 4.4265e-14 | ||
| 0.0233 | 4.9710e-06 | 3.17 | 9.9924e-03 | 1.98 | 1.2225e-13 | ||
| 1 | 0.3536 | 1.5356e-01 | - | 1.6980e+00 | - | 1.0977e-15 | |
| 0.1768 | 4.4590e-02 | 1.78 | 7.6794e-01 | 1.14 | 3.0290e-15 | ||
| 0.0884 | 1.1317e-02 | 1.98 | 3.3497e-01 | 1.2 | 3.9649e-15 | ||
| 0.0442 | 2.8199e-03 | 2.0 | 1.5790e-01 | 1.09 | 8.4733e-15 | ||
| 0.0221 | 7.0356e-04 | 2.0 | 7.7581e-02 | 1.03 | 3.3386e-14 | ||
| 2 | 0.3536 | 5.6481e-02 | - | 1.5316e+00 | - | 8.3672e-15 | |
| 0.1768 | 9.0257e-03 | 2.65 | 8.8572e-01 | 0.79 | 8.7864e-15 | ||
| 0.0884 | 9.1090e-04 | 3.31 | 3.0408e-01 | 1.54 | 1.5897e-14 | ||
| 0.0442 | 7.7982e-05 | 3.55 | 8.2445e-02 | 1.88 | 4.1011e-14 | ||
| 0.0221 | 6.5169e-06 | 3.58 | 2.1539e-02 | 1.94 | 1.1272e-13 |
| meshes | Rate | Rate | Rate | |||||
|---|---|---|---|---|---|---|---|---|
| 1 | 0.3727 | 4.7679e-02 | - | 9.1759e-01 | - | 3.5180e-01 | - | |
| 0.1863 | 1.3848e-02 | 1.78 | 4.9783e-01 | 0.88 | 1.7097e-01 | 1.04 | ||
| 0.0932 | 3.7189e-03 | 1.9 | 2.5769e-01 | 0.95 | 6.4053e-02 | 1.42 | ||
| 0.0466 | 9.5814e-04 | 1.96 | 1.3086e-01 | 0.98 | 2.5234e-02 | 1.34 | ||
| 0.0233 | 2.4266e-04 | 1.98 | 6.5904e-02 | 0.99 | 1.1266e-02 | 1.16 | ||
| 2 | 0.3727 | 7.6370e-03 | - | 1.7843e-01 | - | 1.8498e-01 | - | |
| 0.1863 | 1.0430e-03 | 2.87 | 4.8383e-02 | 1.88 | 4.9715e-02 | 1.9 | ||
| 0.0932 | 1.3037e-04 | 3.0 | 1.2346e-02 | 1.97 | 9.4398e-03 | 2.4 | ||
| 0.0466 | 1.6216e-05 | 3.01 | 3.1185e-03 | 1.99 | 1.5328e-03 | 2.62 | ||
| 0.0233 | 2.0260e-06 | 3.0 | 7.8440e-04 | 1.99 | 2.5201e-04 | 2.6 | ||
| 1 | 0.3536 | 7.8227e-02 | - | 9.9789e-01 | - | 3.1471e-01 | - | |
| 0.1768 | 1.9856e-02 | 1.98 | 5.0244e-01 | 0.99 | 1.5002e-01 | 1.07 | ||
| 0.0884 | 4.9809e-03 | 2.0 | 2.5167e-01 | 1.0 | 5.6183e-02 | 1.42 | ||
| 0.0442 | 1.2462e-03 | 2.0 | 1.2589e-01 | 1.0 | 2.2761e-02 | 1.3 | ||
| 0.0221 | 3.1162e-04 | 2.0 | 6.2955e-02 | 1.0 | 1.0399e-02 | 1.13 | ||
| 2 | 0.3536 | 6.3629e-03 | - | 1.9293e-01 | - | 7.4471e-01 | - | |
| 0.1768 | 8.0376e-04 | 2.98 | 4.8794e-02 | 1.98 | 2.0652e-01 | 1.85 | ||
| 0.0884 | 9.6233e-05 | 3.06 | 1.2098e-02 | 2.01 | 3.4511e-02 | 2.58 | ||
| 0.0442 | 1.1679e-05 | 3.04 | 3.0013e-03 | 2.01 | 5.1169e-03 | 2.75 | ||
| 0.0221 | 1.4478e-06 | 3.01 | 7.4778e-04 | 2.0 | 9.0330e-04 | 2.5 |
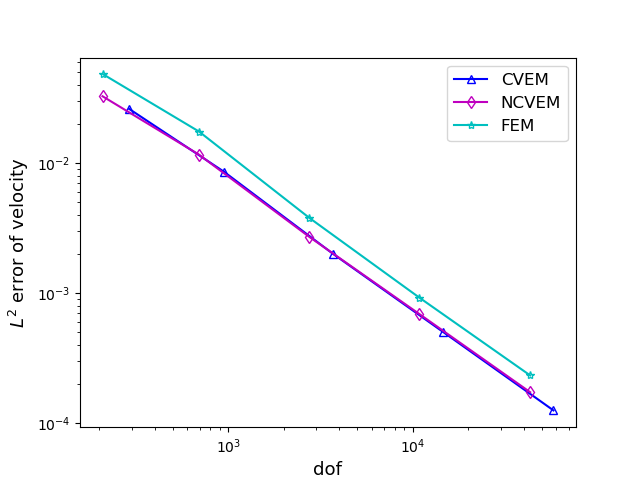
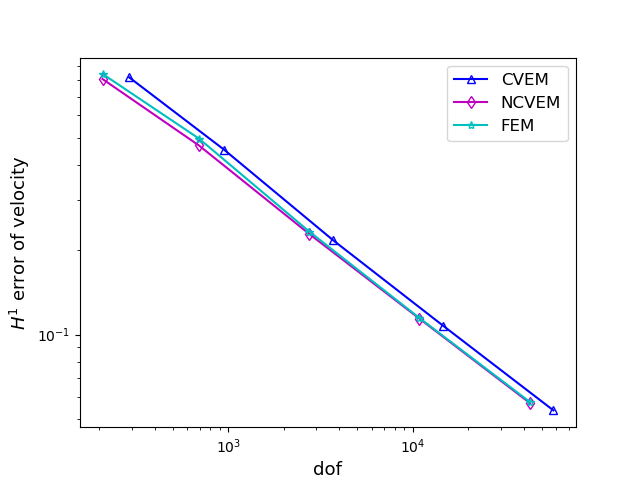
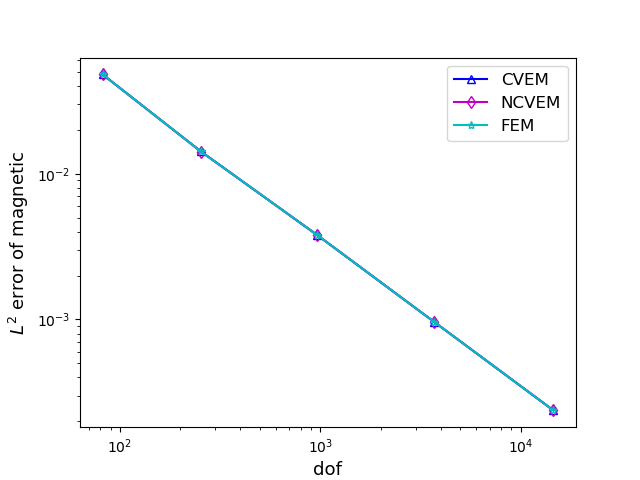
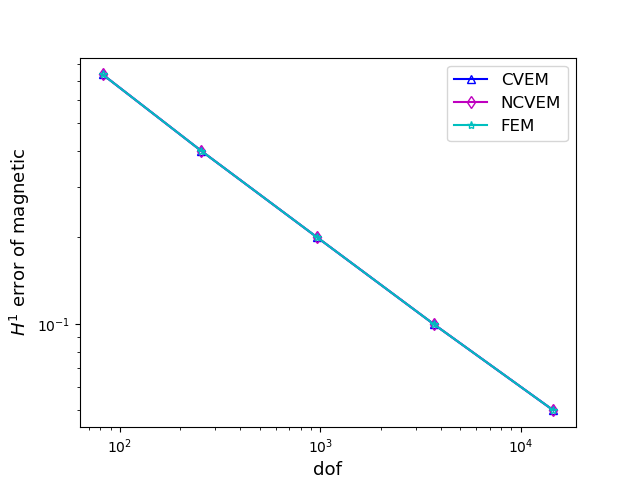
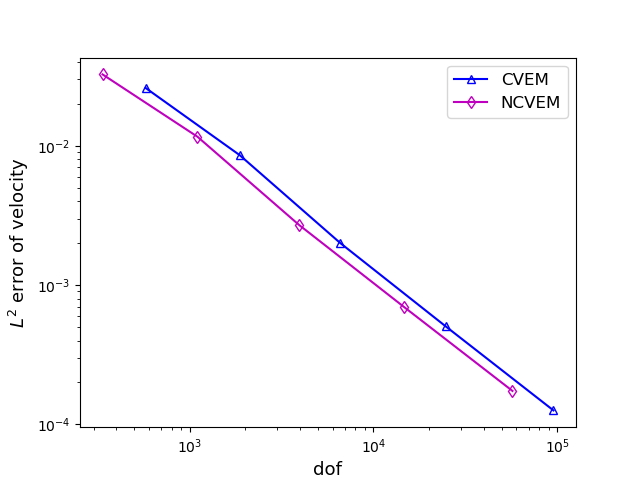
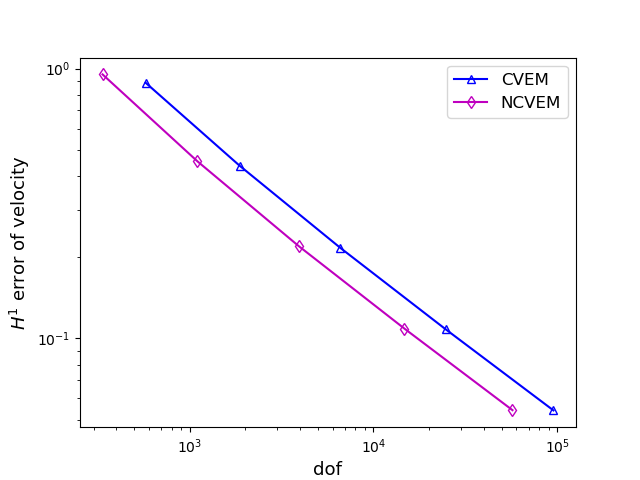
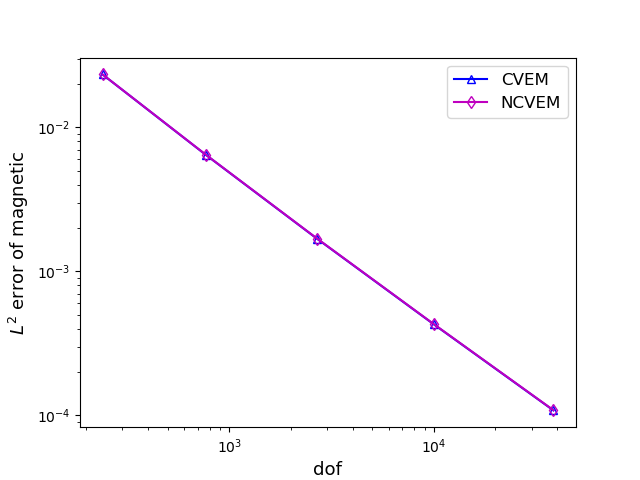
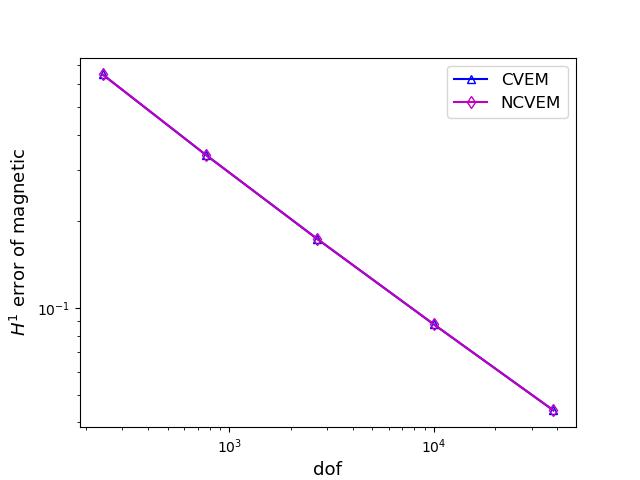
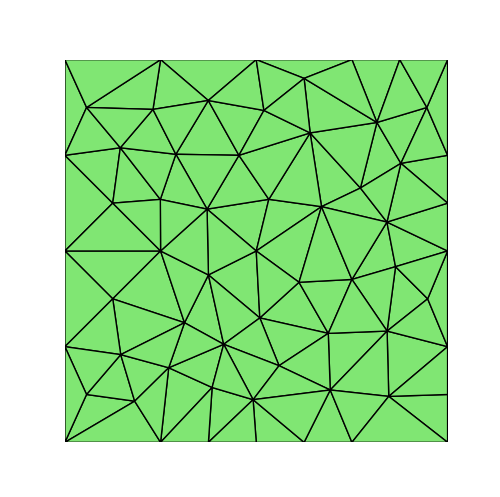
For comparison, we also solve the MHD problem by the conforming VEM and the FEM. In Figure 2, we compare with three methods on meshes for the case , by displaying the error curves of the velocity and magnetic field with respect to the number of degrees of freedom. Figure 3 shows the compared results of the conforming VEM and the nonconforming VEM on meshes for the case . From Figures 2 and 3, we observe that our proposed nonconforming VEM can provide better approximations for the velocity than the conforming VEM and the FEM in the numerical test for the case .
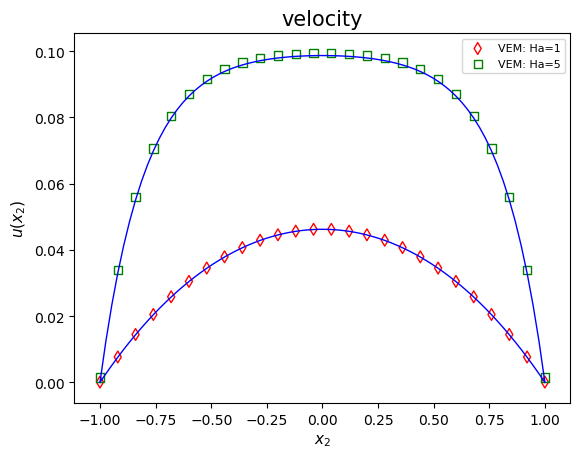
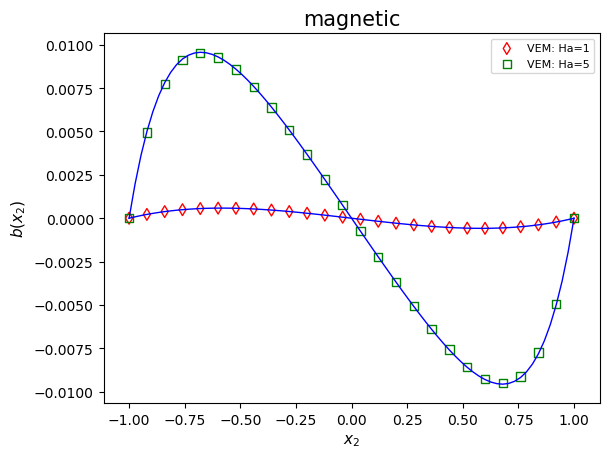
Example 5.2
We consider Hartmann flow in the channel . The transverse magnetic field is applied. The solutions of MHD are
where
is the Hartmann number, , and boundary conditions are given by
Without loss of generality, we set . The numerical experiment is carried out on meshes with . Figure 4 presents the first components of numerical solutions (-projection) and analytical solutions with () and (). The experiment indicates that the numerical solutions almost agree with the analytical solutions.
Acknowledgements
The research was supported by the National Natural Science Foundation of China (Nos: 12071404, 11971410, 12026254), Young Elite Scientist Sponsorship Program by CAST (No: 2020QNRC001), the Science and Technology Innovation Program of Hunan Province (No: 2024RC3158), Key Project of Scientific Research Project of Hunan Provincial Department of Education (No: 22A0136), Postgraduate Scientific Research Innovation Project of Hunan Province (No: CX20230614).
References
- [1] D. Adak, D. Mora, S. Natarajan, and A. Silgado. A virtual element discretization for the time dependent Navier–Stokes equations in stream-function formulation. ESAIM: Mathematical Modelling and Numerical Analysis, 55(5):2535–2566, 2021.
- [2] B. Ahmad, A. Alsaedi, F. Brezzi, L. D. Marini, and A. Russo. Equivalent projectors for virtual element methods. Computers Mathematics with Applications, 66(3):376–391, 2013.
- [3] S. N. Alvarez, V. Bokil, V. Gyrya, and G. Manzini. The virtual element method for resistive magnetohydrodynamics. Computer Methods in Applied Mechanics and Engineering, 381:113815, 2021.
- [4] P. F. Antonietti, L. Beirão da Veiga, D. Mora, and M. Verani. A stream virtual element formulation of the Stokes problem on polygonal meshes. SIAM Journal on Numerical Analysis, 52(1):386–404, 2014.
- [5] L. Beirão da Veiga, F. Brezzi, A. Cangiani, G. Manzini, L. D. Marini, and A. Russo. Basic principles of virtual element methods. Mathematical Models and Methods in Applied Sciences, 23(01):199–214, 2013.
- [6] L. Beirão da Veiga, F. Brezzi, L. D. Marini, and A. Russo. The hitchhiker’s guide to the virtual element method. Mathematical Models and Methods in Applied Sciences, 24(08):1541–1573, 2014.
- [7] L. Beirão da Veiga, F. Dassi, G. Manzini, and L. Mascotto. The virtual element method for the 3D resistive magnetohydrodynamic model. Mathematical Models and Methods in Applied Sciences, 33(03):643–686, 2023.
- [8] L. Beirão da Veiga, C. Lovadina, and G. Vacca. Divergence free virtual elements for the Stokes problem on polygonal meshes. ESAIM: Mathematical Modelling and Numerical Analysis, 51(2):509–535, 2017.
- [9] L. Beirão da Veiga, C. Lovadina, and G. Vacca. Virtual elements for the Navier–Stokes problem on polygonal meshes. SIAM Journal on Numerical Analysis, 56(3):1210–1242, 2018.
- [10] S. C. Brenner. The mathematical theory of finite element methods. Springer, 2008.
- [11] S. C. Brenner and L.-Y. Sung. Virtual element methods on meshes with small edges or faces. Mathematical Models and Methods in Applied Sciences, 28(07):1291–1336, 2018.
- [12] A. Cangiani, V. Gyrya, and G. Manzini. The nonconforming virtual element method for the Stokes equations. SIAM Journal on Numerical Analysis, 54(6):3411–3435, 2016.
- [13] L. Chen and J. Huang. Some error analysis on virtual element methods. Calcolo, 55:1–23, 2018.
- [14] C. Cuvelier, A. Segal, and A. A. Van Steenhoven. Finite element methods and Navier-Stokes equations, volume 22. Springer Science & Business Media, 1986.
- [15] P. A. Davidson. Introduction to magnetohydrodynamics, volume 55. Cambridge university press, 2017.
- [16] B. A. De Dios, K. Lipnikov, and G. Manzini. The nonconforming virtual element method. ESAIM: Mathematical Modelling and Numerical Analysis, 50(3):879–904, 2016.
- [17] X. Dong and Y. He. Two-level newton iterative method for the 2D/3D stationary incompressible magnetohydrodynamics. Journal of Scientific Computing, 63(2):426–451, 2015.
- [18] X. Dong, Y. He, and Y. Zhang. Convergence analysis of three finite element iterative methods for the 2D/3D stationary incompressible magnetohydrodynamics. Computer Methods in Applied Mechanics and Engineering, 276:287–311, 2014.
- [19] J.-F. Gerbeau, C. Le Bris, and T. Lelièvre. Mathematical methods for the magnetohydrodynamics of liquid metals. Clarendon Press, 2006.
- [20] C. Greif, D. Li, D. Schötzau, and X. Wei. A mixed finite element method with exactly divergence-free velocities for incompressible magnetohydrodynamics. Computer Methods in Applied Mechanics and Engineering, 199(45-48):2840–2855, 2010.
- [21] M. D. Gunzburger, A. J. Meir, and J. S. Peterson. On the existence, uniqueness, and finite element approximation of solutions of the equations of stationary, incompressible magnetohydrodynamics. Mathematics of Computation, 56(194):523–563, 1991.
- [22] R. Hiptmair, L. Li, S. Mao, and W. Zheng. A fully divergence-free finite element method for magnetohydrodynamic equations. Mathematical Models and Methods in Applied Sciences, 28(04):659–695, 2018.
- [23] K. Hu, Y. Ma, and J. Xu. Stable finite element methods preserving B= 0 exactly for mhd models. Numerische Mathematik, 135(2):371–396, 2017.
- [24] K. Hu and J. Xu. Structure-preserving finite element methods for stationary MHD models. Mathematics of Computation, 88(316):553–581, 2019.
- [25] H. Huang, Y. Huang, and X. Dong. Three interior penalty DG methods for stationary incompressible magnetohydrodynamics. Journal of Computational and Applied Mathematics, 425:115030, 2023.
- [26] O. A. Karakashian and W. N. Jureidini. A nonconforming finite element method for the stationary Navier–Stokes equations. SIAM Journal on Numerical Analysis, 35(1):93–120, 1998.
- [27] X. Liu and Z. Chen. The nonconforming virtual element method for the Navier-Stokes equations. Advances in Computational Mathematics, 45:51–74, 2019.
- [28] X. Liu, J. Li, and Z. Chen. A nonconforming virtual element method for the Stokes problem on general meshes. Computer Methods in Applied Mechanics and Engineering, 320:694–711, 2017.
- [29] L. Mascotto. Ill-conditioning in the virtual element method: Stabilizations and bases. Numerical Methods for Partial Differential Equations, 34(4):1258–1281, 2018.
- [30] S. Naranjo-Alvarez, L. Beirão da Veiga, V. A. Bokil, F. Dassi, V. Gyrya, and G. Manzini. The virtual element method for a 2D incompressible MHD system. Mathematics and Computers in Simulation, 211:301–328, 2023.
- [31] Q. Tang and Y. Huang. Local and parallel finite element algorithm based on Oseen-type iteration for the stationary incompressible MHD flow. Journal of Scientific Computing, 70:149–174, 2017.
- [32] H. Wei, X. Huang, and A. Li. Piecewise divergence-free nonconforming virtual elements for Stokes problem in any dimensions. SIAM Journal on Numerical Analysis, 59(3):1835–1856, 2021.
- [33] H. Wei and Y. Huang. Fealpy: Finite Element Analysis Library in Python. https://github.com/weihuayi/ fealpy, Xiangtan University, 2017-2023.
- [34] B. Zhang, J. Zhao, and M. Li. The divergence-free nonconforming virtual element method for the Navier–Stokes problem. Numerical Methods for Partial Differential Equations, 39(3):1977–1995, 2023.
- [35] J. Zhao, B. Zhang, S. Mao, and S. Chen. The divergence-free nonconforming virtual element for the Stokes problem. SIAM Journal on Numerical Analysis, 57(6):2730–2759, 2019.