Concordance invariant for balanced spatial graphs using grid homology
Abstract.
The invariant is a concordance invariant using knot Floer homology. Földvári[1] gives a combinatorial restructure of it using grid homology. We extend the combinatorial invariant for balanced spatial graphs. Regarding links as spatial graphs, we give an upper and lower bound for the invariant when two links are connected by a cobordism. Also, we show that the combinatorial invariant is a concordance invariant for knots.
1. Introduction
The invariant and the invariant are defined by Ozsváth, Szabó [4],[6] using knot Floer homology. The invariant and the invariant give homomorphisms from the (smooth) knot concordance group to and lower bounds for the slice genus and the unknotting number. The invariant is known to prove the Milnor conjecture [7]. The invariant is a family of concordance invariants defined for every and the slope of the invariant at equals the value of the invariant, so the invariant is stronger than the invariant. The invariant shows that the subgroup of generated by topologically slice knots has direct summand [6].
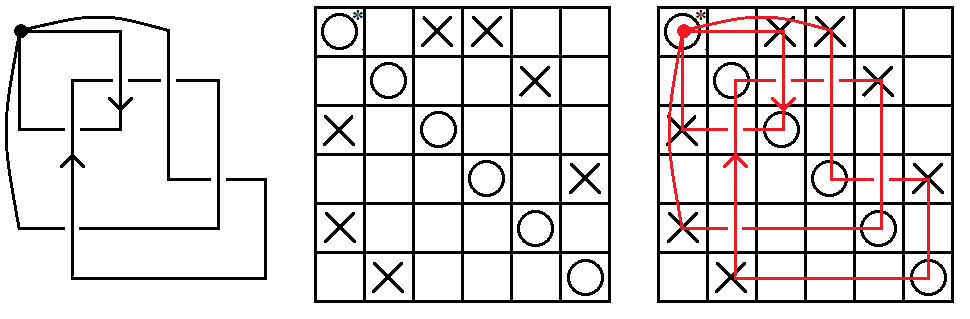
Grid homology is a combinatorial version of knot (link) Floer homology developed by Manolescu, Ozsváth, Szabó, and Thurston [3]. The original definition of knot Floer homology needs gauge theory and pseudo-holomorphic curves. In contrast, grid homology only needs combinatorial procedures such as gazing at a planar figure called a grid diagram (figure 1) and counting some rectangles on the grid diagram.
One of the main research directions of grid homology is to give purely combinatorial proofs for the known properties of knot Floer homology. For example, Sarkar [7] gave a combinatorial reconstruction of the invariant, which we denote , using grid homology. Sarkar also gave a purely combinatorial proof that the is a concordance invariant. As an application of it, a combinatorial proof of the Milnor conjecture was obtained. Földvári [1] defined the invariant using grid homology for and evaluated the change of values on crossing changes.
A spatial graph is a smooth embedding , where is a one-dimensional CW-complex. We assume that spatial graphs are always oriented. A transverse spatial graph is a spatial graph such that for each vertex , there is a small disk whose center is separating incoming edges and outgoing edges. In this paper, we need one more condition: a transverse spatial graph is balanced if at each vertex, the number of incoming edges equals the number of outgoing edges.
Harvey, O’Donnol [2] extended grid homology to transverse spatial graphs. Then it is natural to explore generalizing of results of knot Floer Homology to transverse spatial graphs. Vance [8] defined the invariant for balanced spatial graphs as an extension of Sarkar’s invariant. As an application of the , Vance gave the bounds for the change of the invariant of two links connected by a link cobordism.
In this paper, we first define for balanced spatial graphs for every as an extension of Földvári’s knot invariant . Then we give a combinatorial proof that (and also ) is a concordance invariant of knots. Our contains more information than Földvári’s because is defined for but our is defined for all .
hhTo construct the invariant, we use the t-modified chain complex from the grid chain complex in the same way as the way of Ozsváth, Stipsicz, and Szabó [6] and prove that the homology of the t-modified chain complex is (almost) independent of the choice of the graph grid diagram. To define the invariant using knot Floer homology, Ozsváth, Stipsicz, and Szabó used a formal construction of the t-modified chain complex from filtered chain complex , and to see the invariance, they showed that filtered chain homotopy equivalent complexes are lifted to chain homotopy equivalent complexes . Applying these ideas and considering the connection between the grid chain complexes and the t-modified chain complexes enable us to define for all and to ensure the invariance of the .
1.1. Main results.
For , let be a certain based ring (see Definition 3.1). Let be a two-dimensional graded vector space , where and their indices describe the grading (we call t-grading). For a graded -module , denotes a shift of such that . Then,
Theorem 1.1.
Let be two graph grid diagrams for the same balanced spatial graph. If their grid numbers are , which means that has squares and has squares, then as graded modules,
Definition 1.2.
Let be a graph grid diagram for balanced spatial graph . For , let
and for , let , where ”non-torsion” means that it is non-torsion as an element of -module.
Theorem 1.3.
If are two graph grid diagrams for ,then .
In other words, is an invariant for balanced spatial graphs. We will denote by .
Let be two oriented links. A genus link cobordism from to is an oriented genus surface smoothly embedded in , such that and . Two -component links are concordant if they are connected by a cobordism consisting of disjoint annuli.
Theorem 1.4.
Let be two links of -components respectively. If there is a genus link cobordism from to , then
Especially, if are two knots , then
i.e. is a concordance invariant for knots.
Corollary 1.5.
For ,
where is the slice genus of .
1.2. Some properties of
Grid homology is a combinatorial version of knot Floer homology, so it is expected that our satisfies the same properties as the original one of Ozsváth, Szabó [4],[6]. Some properties of the original invariant are proved using algebraic techniques, and we show some of them in the same way.
Proposition 1.6.
.
Proposition 1.7.
If two links and differ in a crossing change, then for ,
Földvári proved this property when two links are knots and is rational, by constructing concrete maps between the t-modified chain complexes (see [1]). In this paper, we show that these maps are induced from some maps on grid chain complexes. Note that this Proposition is weaker than the original property in [6, Proposition 1.10].
For a balanced spatial graph , let be a balanced spatial graph which is the disjoint union of a trivial knot and , regarding the trivial knot as a graph consisting of one vertex and one edge.
Proposition 1.8.
For a balanced spatial graph ,
For a balanced spatial graph and a vertex , let denote the balanced spatial graph obtained by attaching a new unknotted, unlinked edge going from to .
Proposition 1.9.
For a balanced spatial graph ,
1.3. Outline of the paper
In Section 2, we review grid homology for transverse spatial graphs and Vance’s the symmetrized Alexander filtration. In Section 3, we define the combinatorial t-modified chain complex directly. In Section 4, we give an alternative definition of the t-modified chain complex from the original grid chain complex using the idea of Ozsváth, Stipsicz, and Szabó [6] and see the two definitions are equivalent. In Section 5, we give chain homotopy equivalences corresponding to the moves on grid diagrams. Using these chain homotopy equivalences, in Section 6, we prove Theorem 1.1 and Theorem 1.3. In Section 7, we consider link cobordisms on grid homology and give a proof for Theorem 1.4. Finally, in Section 8, we verify Proposition 1.6, 1.7, 1.8, and 1.9.
2. Grid homology for transverse spatial graphs
This section provides an overview of grid homology for transverse spatial graphs. See [2] for details. For grid homology for knots and links, see [3],[5].
A planar graph grid diagram (figure 1) is a grid of squares some of which is decorated with an - or - (sometimes -) marking such that it satisfies the following conditions.
-
(i)
There is just one or on each row and column.
-
(ii)
There is at least one on each row and column.
-
(iii)
’s (or ’s) and ’s do not share the same square.
We denote the set of -markings by and the set of -markings by . We often use the labeling of markings as and .
For any transverse spatial graph , we can take graph grid diagrams representing . The relation between a spatial graph and representing grid diagram is the following: Drawing horizontal segments from the (or ) marking to the -markings in each row and vertical segments from the -markings to the (or ) marking in each column and assuming that the vertical segments always cross above the horizontal segments, then we can recover the spatial graph from the corresponding graph grid diagram. We think that -markings correspond to vertices, - and -markings to the interior of edges of the transverse spatial graph.
A toroidal graph grid diagram is a graph grid diagram that we think it as a diagram on the torus obtained by identifying edges in a natural way. We assume that every toroidal diagram is oriented in a natural way.
Harvey and O’Donnol showed that any two graph grid diagrams representing the same spatial graph are connected by a finite sequence of the graph grid moves. The graph grid moves are the following three moves on the torus (See also [2, Section 3.4])
-
•
Cyclic permutation (figure 2) permuting the rows or columns cyclically.
-
•
Commutation′ (figure 3) permuting two adjacent columns satisfying the following condition; there are vertical line segments on the torus such that (1) contain all the ’s and ’s in the two adjacent columns, (2) the projection of to a single vertical circle is , and (3) the projection of their endpoints, , to a single is precisely two points. Permuting two rows is defined in the same way.
-
•
(De-)stabilization′ (figure 4) let be an graph grid diagram and choose an -marking. Then is called a stabilization′ of if it is an graph grid diagram obtained by adding one new row and column next to the -marking of , moving the -marking to next column, and putting new one -marking just above the -marking and one -marking just upper left of the -marking. The inverse of stabilization′ is called destabilization′.



We write the horizontal circles and vertical circles which separate the torus into squares as and respectively.
A state of is a bijection . We denote by the set of states of . We describe a state as points on a toroidal graph grid diagram (figure 5).

We think that there are squares on that is separated by . Fix (g), a domain from to is a formal sum of the closure of squares satisfying and , where is the portion of the boundary of in the horizontal circles and is the portion of the boundary of in the vertical ones. A domain is positive if the coefficient of any square is non-negative. Here we always assume that any domain is positive. Let denote the set of domains from to .
Consider that coincide with points. An rectangle from to is a domain that satisfies that is the union of four segments. A rectangle is an empty rectangle if . Let be the set of empty rectangles from to .
The grid chain complex is a module over freely generated by , where and the ’s are the formal variables corresponding to the ’s in . The differential is defined as counting empty rectangles by
where if contains and otherwise for .
There are two gradings for , the Maslov grading and the Alexander grading. A planar realization of toroidal diagram is a planar figure obtained by cutting toroidal diagram along and for some and , and putting on in a natural way. For two points , let if and . For two sets of finitely points , let be the number of pairs with and let . Let be the number of -markings in the row caontaining (). Then for , the Maslov grading and the Alexander grading are defined by
| (2.1) | |||
| (2.2) |
These two gradings are extended to the whole of by
| (2.3) |
Note that the Alexander grading here is the same as Vance’s definition, while the original Alexander grading by Harvey and O’Donnol has values in , where is the transverse spatial graph represented by . The Alexander grading here is given from the original one by taking the canonical homomorphism which sends the generators to 1. Also, note that the Alexander grading is not well-defined as a toroidal diagram, however, relative Alexander grading is well-defined.
It is shown that the differential drops Maslov grading by 1 and preserves or drops Alexander grading, so is a Maslov graded, Alexander filtered chain complex [8, Proposition 3.7].
Suppose the -markings are labeled so that are -markings and are -markings. Let be the minimal subcomplex of containing . Then is a Maslov graded, Alexander filtered chain complex over -vector space obtained by letting and be the map induced by .
We denote by (respectively ) the Alexander filtration of (respectively ).
Definition 2.1 ([8, Definition3.10]).
For a graph grid diagram , define the symmetrized Alexander filtration to be the absolute Alexander filtration obtained by fixing the relative Alexander grading so that , where
Definition 2.2.
The symmetrized Alexander grading is determined by symmetrized Alexander filtration so that for , the value of is the maximal filtration level which belongs.
Let be a Maslov graded, symmetrized Alexander filtered chain complex obtained from by using the symmetrized Alexander grading rather than the Alexander grading .
The homology of the associated graded object of is an invariant for balanced spatial graphs [8, Theorem 3.15].
3. The t-modified chain complex
This section provides the definition of the t-modified chain complex . The t-modified chain complex here is the extension of one of Földvári.
First of all, we define the based ring of .
A set is well-ordered if any subset has a minimal element.
Definition 3.1 ([6, Definition 3.1]).
Let denote the set of nonnegative real numbers. The ring of long power series is defined as follows. As an abelian group, is the group of formal sums
The sum in is given by the formula
and the product is given by the formula
where
It is straightforward to check that the above operations are well-defined.
Then we define the t-modified chain complex . For a domain as a formal sum of squares, let denote the coefficient of the square containing , and let
We define in the same manner.
Definition 3.2.
For , the t-modified grid complex is a free module over generated by with the -module endmorphism defined by
| (3.1) |
where is the number of -markings on the same row as ().
Definition 3.3.
For and , the t-grading is,
| (3.2) |
where is the symmetrized Alexander grading.
Proposition 3.4.
.
Proof.
For states and and a fixed domain denote by the number of ways to decompose as a composite of two empty rectangles . Note that if for some , then
It follows that for ,
| (3.3) |
If or , the same argument in [6, Theorem 3.2] shows that is even. If , is an annulus and . Since and are empty, this annulus has a height or width equal to 1. Such an annulus is called a thin annulus. For each , there are thin annuli appearing in (3.3). We can pair annuli that contain the same -marking. If is such a pair, then because is a balanced spatial graph. So all terms are canceled in pairs (we are working modulo 2). ∎
Proposition 3.5.
The map drops the t-grading by one.
Proposition 3.6.
is a t-graded chain complex over .
Definition 3.7.
Let , and we define t-modified graph grid homology of to be
4. Formal construction of the t-modified chain complex
In this section, we give an alternative definition of the t-modified chain complex using the grid chain complex. See [6, Section 4] for details.
Suppose that is a finitely generated, Maslov graded, Alexander filtered chain complex over . Let be a generator of over , with Maslov grading . Since multiplication by drops the Maslov grading by 2, elements of Maslov grading are linear combinations of elements of the form , where is a generator. Then the differential on can be written as
| (4.1) |
where .
Definition 4.1 (Definition 4.1,[6]).
For , suppose that is a finitely generated, Maslov graded, Alexander filtered chain complex over , and let be the ring of Definition 3.1 (containing by ). The formal t-modified chain complex of is defined as follows
-
•
As an -module,
-
•
For each generator of , define
-
•
Endow the graded module with a differential
(4.2) where are determined by (4.1).
Definition 4.2.
For a graph grid diagram , let denote the quotient chain complex as a Maslov graded chain complex over -module.
Note that is a Maslov graded chain complex but not an Alexander filtered chain complex because the drop in the Alexander grading of each differs by (2.3). However, Definition 4.1 works for because each generator has its Alexander grading. Therefore we can define the formal t-modified chain complex .
Proposition 4.3.
Proof.
Identifying the generators and their gradings is natural, so we only need to check that (3.1) and (4.2) are equivalent. In other words, we will check that for ,
| (4.3) |
and
| (4.4) |
We will consider the case of . Let be the two rectangles from to . Then and appear in . Because the numbers of - and -markings the two rectangles contain are the same, the quotient map sends these two terms to the same element (that is ), so they are canceled modulo 2. Therefore we get .
Also it is clear that and that . Therefore (4.3) is proved.
Next, we introduce the following proposition playing an important role in this paper.
Proposition 4.4 ([6, Proposition 4.4]).
Let be a Maslov graded, Alexander filtered chain map between chain complexes over . There is a corresponding graded chain map , with the following properties
-
•
If and are two Maslov graded, Alexander filtered chain maps, then
-
•
If are chain homotopic to each other, then and are chain homotopic to each other. In particular, filtered chain homotopy equivalent complexes are transformed by the construction into homotopy equivalent complexes.
Again note that this proposition can be applied as even if is just Maslov graded chain complex with grading only for generators. Similar to (4.1), Maslov graded chain map can be written as
then the corresponding graded chain map is
This construction gives induced chain homotopy equivalence for the t-modified chain complexes.
5. Chain homotopy equivalences for grid chain complexes
This section provides the filtered chain homotopy equivalences for grid chain complexes connected by each graph grid move. These filtered chain homotopy equivalences are lifted into chain homotopy equivalences for the t-modified chain complexes by applying Proposition 4.4. Chain homotopy equivalences for a cyclic permutation and a commutation′ are already known. We mainly observe the case of stabilization′.
5.1. cyclic permutation
Proposition 5.1.
If and are connected by a single8 cyclic permutation, then as Maslov graded, Alexander filtered chain complexes, and are chain homotopy equivalent.
Proof.
There is a natural bijection . By [8, Section 3.3 and Theorem 3.15], induces an isomorphism of Maslov graded, symmetrized Alexander filtered chain complexes . As is a bijection, there is an isomorphism induced by such that and . ∎
5.2. commutation′
Proposition 5.2.
If and are connected by a single commutation′, then as Maslov graded, Alexander filtered chain complexes, and are chain homotopy equivalent.
5.3. stabilization′
Assume that is obtained from by a single stabilization′ and that is a chain complex over and is a chain complex over . Number the -markings of so that is the new one and is the -marking in the row just below . We will also assume that lies in the same row as and is the -marking just below . We denote by the intersection point of the new horizontal and vertical circles in (Figure 6). Note that there may be more -markings in the row that includes (in which case is an -marking).

For a Maslov graded, Alexander filtered chain complex , let denote the shifted complex such that , where is the submodule of whose grading is and filtration level is .
Considering the point , we will decompose the set of states as the disjoint union , where and . This decomposition gives a decomposition of as an -module, where and are the spans of and respectively.
There is a natural bijection between and , given by
Let be a chain complex defined by with the differential . Consider a chain complex .
For the stabilization′ invariance, we will prove the following proposition.
Proposition 5.3.
and are chain homotopy equivalent complexes.
This can be proved in the same way as the proof of stabilization invariance of grid homology for knots and links written in [5, Sections 13.3.2 and 13.4.2]. Because we are working on Alexander filtered version, the domains which appear in the chain maps can contain any -markings of , in other words, they are independent of the -markings. Thus we can use the same domains as in [5, Definitions 13.3.7 and 13.4.2] to show this Proposition. We construct chain homotopy equivalence using the filtered destabilization map ([5, Definition 13.3.10]), the filtered stabilization map ([5, Definition 13.4.3]) and chain homotopy (Definition 5.10). Note that these maps are the answer to [5, Exercise 13.4.4].
Definition 5.4 ([5, Definition 13.3.7]).
For and , a positive domain is said to be of type if it is trivial or it satisfies the following conditions
-
•
At each corner point in , at least three of the four adjoining squares have the local multiplicity zero.
-
•
Three of four squares attaching at the corner point have the local multiplicity and at the southwest square meeting the local multiplicity is .
-
•
has components that are not in .
And, a positive domain is said to be of type if it is trivial or it satisfies the following conditions
-
•
At each corner point in , at least three of the four adjoining squares have the local multiplicity zero.
-
•
Three of four squares attaching at the corner point have the local multiplicity and at the southeast square meeting the local multiplicity is .
-
•
has components that are not in .
The set of domains of type (respectively type ) from to is denoted (respectively ).


Definition 5.5 ([5, Definition 13.4.2]).
For and , a positive domain is said to be of type if it is trivial or it satisfies the following conditions
-
•
At each corner point in , at least three of the four adjoining squares have local multiplicity zero.
-
•
Three of four squares attaching at the corner point have the local multiplicity and at the northwest square meeting the local multiplicity is .
-
•
has components that are not in .
And, a positive domain is said to be of type if it is trivial or it satisfies the following conditions
-
•
At each corner point in , at least three of the four adjoining squares have local multiplicity zero.
-
•
Three of four squares attaching at the corner point have the local multiplicity and at the northeast square meeting the local multiplicity is .
-
•
has components that are not in .
The set of domains of type and from to is denoted and respectively.

Let be the vertical circle containing the point .
Definition 5.6.
For , a positive domain is said to be of type if it satisfies the following conditions
-
•
.
-
•
Only one point of on is contained in the interior of , and at the other points, three of the four adjoining squares have local multiplicity zero.
-
•
satisfies that , where is the coefficient of at the square containing .
A positive domain is said to be of type if it satisfies the following conditions
-
•
.
-
•
Let . Then, points of are contained in the interior of , and at the other points three of the four adjoining squares have local multiplicity zero.
-
•
satisfies that
A positive domain is said to be of type if it satisfies the following conditions
-
•
.
-
•
Let . Then, points of are contained in the interior of , and at the other points three of the four adjoining squares have local multiplicity zero.
-
•
One of the vertical segments of is on the vertical circle and it goes up.
-
•
satisfies that
The set of domains of type , , and from to is denoted .
Note that however there are some domains that are both type and type , the proof holds.
Definition 5.7.
The -module homomorphisms and are given by
| (5.1) | |||
| (5.2) |
Then, is defined by
Definition 5.8.
The -module homomorphisms and are given by
| (5.3) | |||
| (5.4) |
Then, is defined by
Let denote the differential of .
Proposition 5.9.
The maps are chain maps.
Proof.
From [5, Lemma 13.3.13], is a chain map by pairing domains of .
Consider the bijection determined by the rotation of the horizontal circle containing . Obviously induces a natural bijection for each . Then a composite domain appears in if and only if appears in . Therefore we can also pair all domains of . ∎
Definition 5.10.
The -module homomorphisms is given by
| (5.5) |
Definition 5.11.
The complexity of a domain is one if it is the trivial domain and, otherwise, is the number of horizontal segments in its boundary. Let us denote by the complexity of .
Proposition 5.12.
The above homomorphisms satisfy that
| (5.6) |
| (5.7) |
Proof.
The map (respectively ) can be decomposed as (respectively ), where the subscript represents the restriction on the complexity of the domains. Then we can draw the following diagram:
Note that the complexities of domains of and are odd, and ones of and are even.
It is convenient to write the horizontal circle crossing the point as and the vertical circle crossing the point as .
Let us first examine the equation (5.6). To see the equation (5.6), we will count domains of the left side of (5.6) and check that domains except for the trivial ones are canceled in modulo 2.
Since we have obviously , all we need to check is , , and . Let be a composite domain with appearing in , , or .
-
(1)
If , then appears in and we get .
-
(2)
Otherwise, consider two points and . We see that since . Then must overlay . If and , at some of the corner points of , all adjoining squares have a local multiplicity greater than . Therefore such a domain cannot be taken.
-
(3)
If or , then there are some points of the initial state as a point that is not a corner in the interior of or . Again, such a domain cannot be taken.
These arguments prove that , , and .
To see the equation (5.7), consider the following diagram
For , let be a composite domain appearing in . Now we will observe that each appears also in or . We have five cases (figure 13-13)




∎
-
(i)
If , then the composite domain must be trivial. This domain also appears in .
-
(ii)
If or , then we can take a small square from by cutting along and another composition or appearing in or . In this case, is of type .
-
(iii)
If and and does not contain any vertical thin annulus, then there is a corner at one point of . Cutting along the horizontal or vertical circle containing gives another decomposition using the domain of type .
-
(iv)
If and and has the vertical thin annulus containing , then consider the domain . This domain connects the same states as and can be decomposed using domains of type . If it is decomposed as or , the rectangle does not contain , so they are canceled in modulo 2.
-
(v)
Finally, we need to check that the remaining domains in are canceled each other. Let or be the remaining composite domain. Let be the number of corners that and share, in other words, let . Then we have three cases .
-
(a)
If , then can be decomposed as and .
-
(b)
If , then has a corner at one point of . Likely the case (iii), cutting at the corner in two different directions gives the two decompositions of .
-
(c)
If , then contains a vertical thin annulus containing , then two domains and are canceled. The domain of type or is used for the decomposition of , and the domain of type of .
-
(a)
6. Proof of the main theorem 1.1 and theorem 1.3
Proof of Theorem 1.1.
Proof of Theorem 1.3.
For , the grading shift from does not affect the value of the because . ∎
7. Link cobordisms with grid homology
In this section, we observe graph grid diagrams for two links connected by a link cobordism. The basic idea is developed by Sarkar [7].
First, we will use the extended grid diagram which has an -marking and an -marking in the same square. The square containing both an -marking and an -marking represents an unknotted, unlinked component. It is known that the homology of these grid diagrams is also invariant. See [5, Section 8.4] for details about extended grid diagrams. A grid diagram representing a link is called tight if there is exactly one -marking in each link component.
In general, the symmetrized Alexander grading is not canonical because it needs to calculate the homology of . However, if the balanced spatial graph is a link, we can take a tight grid diagram representing it, and the symmetrized Alexander grading is written explicitly: from [5, Section 8.2],
| (7.1) |
where is the number of link components.
According to Sarkar [7] and Vance [8], two tight grid diagrams representing two links connected by a link cobordism are connected by a finite sequence of link-grid moves. These moves are commutation′s, (de-)stabilization′s, births, -saddles, -saddles, and deaths.
A grid diagram is obtained from by a birth (figure 16) if adding one row and column to and putting an -marking and -marking in the square which is the intersection of the new row and column. A grid move death is the inverse move of a birth. The move birth (respectively death) represents a birth (respectively a death) on link cobordism. These moves are link-grid move (respectively ) in [7].
A grid diagram is obtained from by an -saddle (figure 16) if has a small squares with two -markings at tow-left and bottom-right, and is obtained from by deleting these two markings and putting new ones at top-right and bottom-left. The move -saddle represents a saddle move on link cobordism. These moves are link-grid move in [7].
A grid diagram is obtained from by -saddle (figure 16) if has a small squares with one -marking at tow-left and one -marking at bottom-right, and is obtained from by deleting these two markings and putting new two -markings at top-right and bottom-left. The move -saddle represents a split move on link cobordism. These moves are link-grid move in [7].



Using grid homology for links, Sarkar [7] evaluated the maximum changes of Maslov and Alexander grading on each link-grid move. We will check that we can define the appropriate maps also on the t-modified chain complexes and that the changes of t-grading are the same as Sarkar’s evaluation with .
In order to prove theorem 1.4, we evaluate the change of grading on each link-grid move. It is convenient to introduce an alternative Alexander grading
Definition 7.1 ([8, Definition 4.2]).
For ,
The symmetrized Alexander grading can be obtained from by adding .
In this section, we are thinking about chain complexes with t-grading using rather than , we set .
For , we can define in the same way as . It is clear that
| (7.2) |
7.1. births and deaths
Proposition 9.2 will imply that there are isomorphisms
These maps preserve t-grading if we use symmetrized Alexander grading , so shifts t-grading by and by . We can write these maps as and using the notations in subsection 5.3 and Proposition 4.4.
As we regard as the map into rather than , is surjective map and shifts t-grading by . Then the maximum shift of t-grading of the homogeneous, non-torsion element in homology by a death is , which implies .
On the other hand, the maximum change by a birth is . Then we get .
7.2. -saddles and -saddles
Before observing the saddles, we prepare an algebraic lemma. Let be a -module. Then the torsion submodule of is
Lemma 7.2.
Let be two -modules. If and are two module maps with the property that for some , then induces an injective map from into .
Proof.
If , then there is a non-zero element with . Then , so . ∎
Then we observe -saddles and -saddles.
Proposition 7.3.
If is obtained by an -saddle, there are -module maps
with the following properties
-
•
shifts t-grading by ,
-
•
shifts t-grading by ,
-
•
,
-
•
.
Proof.
Let be the point in the center of the squares as in Figure 16. Define and by
and
It is straightforward to see that these two maps preserve Maslov grading and increase Alexander grading by , so they shift t-grading by . Obviously, both and are multiplication by . It is also clear that both and are chain maps. Think of the maps on homology induced by them. ∎
By Lemma 7.2, Proposition 7.3 means that the shift of t-grading of the homogeneous, non-torsion element in homology by a -saddle is
Proposition 7.4.
If is obtained by an -saddle, there are -module maps
with the following properties
-
•
shifts t-grading by ,
-
•
shifts t-grading by ,
-
•
,
-
•
.
Proof.
We can prove this in the same way as Proposition 7.3.; All we need is to consider and as
and
By definitions, these two maps drop Maslov grading by and Alexander grading by , so they shift t-grading by . It is clear that and are multiplication by .
∎
8. Proof of the main Theorem 1.4
Proposition 8.1 ([7, Theorem 4.1]).
If are two tight grid diagrams representing -component links , respectively, and if there is a link cobordism with births, saddles, and deaths, then there is a sequence of link-grid moves connecting from to , such that there are exactly births, -saddles, -saddles, and deaths, and these happen in this order.
Proof of Theorem 1.4.
Let be two grid diagrams represents , respectively. By Proposition 8.1, there is a sequence of link-grid moves taking to such that births, -saddles, -saddles, and deaths happen in this order. Take a homogeneous, non-torsion element whose t-grading is . Composing maps in the previous section, we get a map that sends onto . By adding up the t-grading shifts of each link-grid move, then we get
so
Use (7.2) and , then
We can once get the other inequality if we reverse the direction of link cobordism, so we see that
∎
9. Proof of some properties of the invariant
9.1. The value of at
Proof of Proposition 1.6.
When , the t-modified chain complex is independent of the -markings because the differential is
and t-grading is
Also, we do not need to distinguish between -markings and -markings. Let be a size of . Remove all -markings of and put -markings so that the new tight grid diagram represents an unknot. Then in grading zero and as chain complexes.

9.2. Crossing change
Proposition 9.1.
If two graph grid diagrams and represent two links and that differ in a crossing change, then there are maps and , with the following properties
-
•
is graded,
-
•
shifts t-grading by ,
-
•
,
-
•
,
9.3. Adding an unknot
Proposition 9.2.
If be two graph grid diagrams as in Figure 16, then as graded -modules,
| (9.1) |
where is t-grading shift by .
Proof.
The basic idea is the same as in [5, Section 8.4], in other words, we can use the same maps as the maps for stabilization′ invariance.
We assume that is a chain complex over and is one over .
We will construct a chain homotopy equivalence
| (9.2) |
As in Figure 16, we assume that has squares such that the top-right square contains both one -marking and one -marking and the bottom-left square has one - or -marking. By definition, is strictly not a graph grid diagram but we can consider about in the same manner (See [5, Lemma 8.4.2] for detail). We denote by c the intersection point of the new horizontal and vertical circles in Under these settings, we can use the same maps , , and as in Definition 5.7, 5.8, and 5.10 respectively for and . Direct computations show that the grading changes of these maps are different from the maps of stabilization′ invariance in Section 5.3 is bigraded, shifts Maslov grading by , is bigraded, and shifts Maslov grading by . Counting domains are independent of markings, so , are chain homotopy equivalences.
∎
9.4. Wedge sum of an unknot
Proposition 9.3.
If be two graph grid diagrams as in Figure 18, then as graded -modules,
| (9.3) |
Proof.
The same argument as Proposition 5.3 works even if there is one extra -marking in the block because the domains that appear in , , and is independent of the extra -marking. We can show that there is a chain homotopy equivalence
where we regard as -module and as -module.

Acknowledgements
I would like to express my sincere gratitude to my supervisor, Tetsuya Ito, for useful discussions and corrections. I sincerely thank the anonymous reviewers for their valuable feedback. This work was supported by JST, the establishment of university fellowships towards the creation of science technology innovation, Grant Number JPMJFS2123.
References
- [1] Viktória Földvári, The knot invariant using grid homologies, J. Knot Theory Ramifications 30 (2021), no. 7, Paper No. 2150051, 26. MR 4321933
- [2] Shelly Harvey and Danielle O’Donnol, Heegaard Floer homology of spatial graphs, Algebr. Geom. Topol. 17 (2017), no. 3, 1445–1525. MR 3677933
- [3] Ciprian Manolescu, Peter Ozsváth, Zoltán Szabó, and Dylan Thurston, On combinatorial link Floer homology, Geom. Topol. 11 (2007), 2339–2412. MR 2372850
- [4] Peter Ozsváth and Zoltán Szabó, Knot Floer homology and the four-ball genus, Geom. Topol. 7 (2003), 615–639. MR 2026543
- [5] Peter S. Ozsváth, András I. Stipsicz, and Zoltán Szabó, Grid homology for knots and links, Mathematical Surveys and Monographs, vol. 208, American Mathematical Society, Providence, RI, 2015. MR 3381987
- [6] by same author, Concordance homomorphisms from knot Floer homology, Adv. Math. 315 (2017), 366–426. MR 3667589
- [7] Sucharit Sarkar, Grid diagrams and the Ozsváth-Szabó tau-invariant, Math. Res. Lett. 18 (2011), no. 6, 1239–1257. MR 2915478
- [8] Katherine Vance, Tau invariants for balanced spatial graphs, J. Knot Theory Ramifications 29 (2020), no. 9, 2050066, 29. MR 4152956