Computing Harmonic Maps and Conformal Maps on Point Clouds
Abstract
We propose a novel meshless method to compute harmonic maps and conformal maps for surfaces embedded in the Euclidean 3-space, using point cloud data only. Given a surface, or a point cloud approximation, we simply use the standard cubic lattice to approximate its -neighborhood. Then the harmonic map of the surface can be approximated by discrete harmonic maps on lattices. The conformal map, or the surface uniformization, is achieved by minimizing the Dirichlet energy of the harmonic map while deforming the target surface of constant curvature. We propose algorithms and numerical examples for closed surfaces and topological disks.
1 Introduction
Roughly speaking, a map between two surfaces is called conformal if it preserves angles, and is called harmonic if it minimizes the stretching energy. Computing harmonic maps and conformal maps has a wide range of applications, such as surface matching, surface parameterization, shape analysis and so on. See [1][2][3][4][5][6][7][8][9][10][11] for examples of applications of conformal maps, and [12][13][14][15][16] for examples of applications of harmonic maps.
Existing methods for computing harmonic maps and conformal maps mostly rely on the triangle mesh approximation of a surface. However, it is often much easier to get point cloud data, rather than the triangle mesh data. Contemporary 3D scanners can easily provide 3D point cloud data sampled from the surfaces of solid objects, but sometimes it is inconvenient to generate meshes upon point clouds. Since point clouds data do not contain information about the connectivity, a lot of algorithms, which were well-established on meshes, cannot be extended to point clouds.
This paper introduces a novel meshless method for computing harmonic maps and conformal maps for a surface in the Euclidean 3-dimensional space. The basic idea is to use a dense 3-dimensional lattice to approximate the -neighborhood of the surface, and then compute the discrete harmonic map from the lattice to the target surface, by minimizing the Dirichlet energy (i.e., the stretching energy). Conformal maps are computed by minimizing the Dirichlet energy of the harmonic maps, as we deform the target surface of constant Gaussian curvature. In this paper, we focus on harmonic diffeomorphisms and conformal diffeomorphisms to surfaces of constant curvature or . These maps are particularly useful for global surface parameterizations. More specifically, we propose algorithms and numerical examples for (1) maps to the unit sphere, and (2) maps to flat rectangles, and (3) maps to flat tori, and (4) maps to closed hyperbolic surfaces.
1.1 Previous Works
Comparing to methods for triangle meshes, there are much fewer works on meshless methods of computing conformal and harmonic maps, especially for higher genus surfaces. Guo et al. [17] computed global conformal parameterizations of surfaces by computing holomorphic 1-forms on point clouds. Li et al. [18] computed harmonic volumetric maps by grids discretizations. Meng-Lui [19] developed the theory of computational quasiconformal geometry on point clouds. Using approximations of the differential operators on point clouds, Liang et al. [20] and Choi et al. [21] computed the spherical conformal parameterizations of genus-0 closed surfaces, and Meng et al. [22] computed quasiconformal maps on topological disks. Li-Shi-Sun [23] computed quasiconformal maps from surfaces to planar domain, using the so-called point integral method for discretizing integral equations for point clouds.
There is an extensive literature on computing conformal maps for triangle meshes. Gu-Yau [24][25] developed the method of computing conformal structures of surfaces by computing the discrete holomorphic one-forms. Pinkall-Polthier [13] proposed a method of conformal parameterization by computing a pair of conjugate harmonic functions. Lévy et al. [26] and Lipman [27] and Lui et al. [28] computed conformal or quasiconformal maps by minimizing or controlling the conformal distortion. There is also a big family of methods based on various notions of discrete conformality for triangle meshes, such as circle patterns [29][30][31][32], and inversive distances [33][34], and vertex scalings [35][36][32], and modified vertex scalings [37] [38] [39][40] allowing diagonal switches. Some related convergence results for discrete conformality can be found in [29][41][42][43][44], and other mathematical analysis can be found in [45][46][47][48][49]. Other works on computing conformal maps on triangle meshes include [50][51][52][53][26][54][55][56][57][58].
For computing harmonic maps on triangle meshes, Gaster-Loustau-Monsaingeon [59][60] give detailed discussions on the mathematical analysis and algorithms, and produced a computer software. Notions of discrete Dirichlet energy have been discussed and used to compute discrete harmonic maps, not only in Gaster-Loustau-Monsaingeon’s work [59][60], but also extensively in other works such as [61][13][62][63][64][65][66][67][68].
1.2 Contribution
To the best of the authors’ knowledge, our method is the first meshless method in computing harmonic and conformal maps to surfaces of genus greater than 1.
Existing meshless methods always use approximating differential operators on point clouds, to compute harmonic or conformal maps. Our method provides a novel type of approach, by jumping out of the point clouds to cubic lattices. It also has the following nice properties.
-
•
The idea of lattice approximation is conceptually simple, and could be implemented for any topological types of surfaces.
-
•
One can simply tune the density of the lattices to get satisfactory accuracy, within the ability of the computing powers.
-
•
Numerical experiments indicate that sparse lattices already work well.
-
•
The lattice structure should be suitable for parallel computation, and multi-grid methods.
We proposed algorithms of computing harmonic maps and conformal maps for any closed surfaces and topological disks, embedded in , to constant curvature surfaces.
1.3 Notations
Given a point, or equivalently a vector in , denote
as the -norm of .
Given two points , denote
as the distance between and .
Given a subset and a point , denote
as the distance from to .
Given a subset and , denote
as the -neighborhood of the subset .
Given a closed surface embedded in , we say a finite subset is a -point cloud of if
If is an undirected connected simple graph, and is an edge weight, then denotes the discrete Laplacian such that for any ,
1.4 Organization of the Paper and Acknowledgement
The remaining of the paper is organized as follows. We review the basic mathematical theory in Section 2, and then introduce the lattice approximation of a surface in Section 3. The algorithms, as well as numerical examples, are given in Section 4, 5, 6, 7, for the cases of spheres, rectangles, flat tori, and hyperbolic surfaces respectively.
This work is partially supported by Center of Mathematical Sciences and Applications at Harvard University, and Yau Mathematical Sciences Center at Tsinghua University, and NSF 1760471.
2 Mathematical Background
2.1 Conformal Maps and the Uniformizations
We give a formal definition of a conformal map as follows.
Definition 2.1 (Conformal Map)
A diffeomorphsim between two Riemannian surfaces and is called a conformal map if for some smooth positive function , or equivalently, the local angles are preserved under .
In this paper we always assume that a conformal map is a diffeomorphism between two surfaces. By the celebrated uniformization theorem, it is well known that any closed orientable surface is conformally equivalent to a surface of constant Gaussian curvature.
Theorem 2.2 (Uniformization for Closed Surfaces)
Given a closed orientable Riemannian surface , there exists a Riemannian surface , with constant Gaussian curvature , and a conformal map such that
-
(a)
if has genus and
-
(b)
if has genus , and
-
(c)
if has genus .
The Riemannian surface above is called a uniformization of and could be viewed as a canonical representative in the conformal equivalence class. A closed surface of constant curvature or can be naturally represented as a planar domain, after a few cuts.
-
(a)
If has constant curvature 0, then it is isometric to the flat complex plane modulo a lattice where and . If we properly cut two loops on , then can be displayed isometrically as a planar domain in .
-
(b)
if has constant curvature -1, then it is isometric to the hyperbolic plane modulo a discrete subgroup of the orientation-preserving isometry group . In the Poincaré disk model, the hyperbolic plane is identified as the unit disk with the complete Riemannian metric
Similar to the flat case, if we properly cut a few loops, can be displayed, isometrically in the hyperbolic sense, as a domain in the unit disk .
So for genus 0 surfaces, there is essentially a unique conformal equivalence class. For genus 1 surfaces, the conformal equivalence classes can be parameterized by a complex number with . For a surface with genus , the conformal equivalence classes can be parameterized by the generators of the discrete subgroup of . As shown above, a surface of constant curvature or can always been identified as a planar domain, by a stereographic projection or cutting loops. So computing diffeomorphisms to such surfaces gives rise to global parameterizations and surface flattening, which have fundamental applications in computational graphics.
For nonclosed surfaces, the most important case is the topological disk. Assume is a Riemannian surface homeomorphic to a closed disk, then again by the uniformization theorem it is conformally equivalent to a closed unit disk. However, for our convenience in utilizing the method of harmonic maps, we consider conformal maps and harmonic maps to rectangles instead of disks. The following uniformization-type theorem for rectangles is well-known.
Theorem 2.3
Assume is a Riemannian surface homeomorphic to a closed disk. Given 4 ordered points on , there exists unique and a conformal map
such that
2.2 Harmonic Maps
Let and be two smooth Riemannian surfaces. The Dirichlet energy, i.e., the stretching energy of a smooth map is formally defined as
where denotes the volume element on , and is the norm of the differential of , with respect to the induced metric on .
Definition 2.4
A smooth map is called harmonic if it is a critical point of the Dirichlet Energy.
Smooth harmonic maps have been extensively studied. See [69][70] for examples. Here we focus on harmonic diffeomorphisms to surfaces of constant curvature or , and harmonic diffeomorphisms to rectangles with given boundary correspondences. Some relevant well-known facts are summarized as the following 2 theorems.
Theorem 2.5
Assume are two closed orientable Riemannian surfaces, and has constant curvature or 0, and is a diffeomorphism from to .
-
(a)
and the equality holds if and only if is conformal.
-
(b)
If is harmonic, minimizes the Dirichlet energy in its homotopy class.
-
(c)
If is conformal, then is harmonic.
-
(d)
If is harmonic and is a unit sphere, then is conformal.
-
(e)
is always homotopic to a harmonic diffeomorphism, which is (i) unique up to a Möbius transformation if , and (ii) unique up to a translation if , and (iii) unique if .
Theorem 2.6
Assume
-
(i)
is a Riemannian surface homeomorphic to a closed disk, and
-
(ii)
are 4 ordered points on , and
-
(iii)
, and
-
(iv)
contains all the diffeomorphisms
such that
Then
-
(a)
For any , and the equality holds if and only if is conformal.
-
(b)
There exists a unique harmonic map , and it is the unique minimizer of the Dirichlet energy in .
-
(c)
If is conformal, then it is harmonic.
By part (b) and (e) of Theorem 2.5, for closed surfaces it makes good sense to compute the harmonic map within a fixed homotopy class. Such a topological constrain also often naturally arises in applications. Part (b) of Theorem 2.5 and part (b) of Theorem 2.6 somewhat justify the physical intuition that harmonic maps minimize the stretching energy. Minimizing the Dirichlet energy would also be an important idea for computing harmonic maps. Part (c) of Theorem 2.5 and part (c) of Theorem 2.6 connect the notions of conformal maps and harmonic maps. So conformal maps are really special harmonic maps, and the converse is true if the target surface is a unit sphere. Part (a) of Theorem 2.5 and Part (a) of Theorem 2.6 point out that conformal maps minimize the normalized Dirichlet energy among the harmonic maps. This optimality provides a method to compute the uniformization using harmonic maps.
-
(a)
If is a topological sphere, a harmonic diffeomorphism from to a unit sphere is already a conformal map.
-
(b)
If is a genus 1 closed orientable surface, one can first compute the harmonic map to a flat torus for some parameter , and then minimize the normalized Dirichlet energy, by tuning the parameter in the upper half plane.
-
(c)
If is a closed orientable surface with genus , one can first compute the harmonic map to a hyperbolic surface for some discrete subgroup of , and then minimize the normalized Dirichlet energy, by continuously deforming the subgroup .
-
(d)
If is homeomorphic to a closed disk, then one can compute the harmonic map to a rectangle , and then minimize the Dirichlet energy, by tuning the parameter .
2.3 Discrete Harmonic Maps
Since we will be computing discrete harmonic maps on lattice graphs, here we briefly introduce the theory of discrete harmonic maps, which has been well-studied. See [68][71][61] for references of the related definitions and theorems. In this subsection, we always assume that is an undirected connected simple graph, and denotes the edge weight, and is a flat rectangle or a closed orientable surface of constant curvature or 0.
A discrete map from to maps each vertex to a point in , and each edge to a geodesic segment in with endpoints . Given a discrete map , we denote as the length of . Assuming the stretching energy on a single edge is , we have the following definition of the discrete Dirichlet energy.
Definition 2.7
Given a discrete map from to , the discrete Dirichlet energy is defined to be
The notion of discrete harmonic maps can be defined by the balanced conditions on vertices.
Definition 2.8
A discrete map is harmonic if for any
| (1) |
where is the unit vector in representing the direction of the geodesic .
This definition consists with the continuous one in the following sense.
Proposition 2.9
A discrete harmonic map is a critical point of , if is not a sphere or for any .
Here the assumption on and is to guarantee that locally can be parameterized by . For the cases of non-positive curvatures, we have the following two well-known theorems partially analogue to Theorem 2.5 and 2.6.
Theorem 2.10
If is closed and has constant curvature or , then any discrete map from to is homotopic to a discrete harmonic map , which is a minimizer of the discrete Dirichlet energy in the homotopy class. Such discrete harmonic map is
-
(a)
unique up to a translation, if is a flat torus, and
-
(b)
unique if has constant curvature .
Theorem 2.11
Assume is a flat rectangle with four ordered edges , and are 4 subsets of such that and . Then there exists a unique discrete map from to such that
and the balanced condition (1) holds for any . Such constrained discrete harmonic map minimizes the discrete Dirichlet energy among all the constrained maps.
3 Cubic Lattice Approximation
3.1 Construction of Lattices
Assume that is a closed smooth surface embedded in , and is a -point cloud of . If is sufficiently small, comparing to some constant , then the -neighborhood of would be a good approximation of the -neighborhood of . If is sufficiently large, comparing to , then
would be a good cubic lattice approximation of (see Figure 1). Connect two vertices in by an edge if , and then we obtain a lattice graph . Since we are using standard cubic lattice, the weight function is set to be constant . Such weighted graph would be our lattice approximation of .
In practice, if the pointcloud data is given, we need to choose a proper such that
-
(a)
is sufficiently large such that forms a connected domain in and has uniform thickness, and
-
(b)
is sufficiently small such that is a good approximation of .
For our second parameter , if we choose a larger integer , the lattice graph should approximates the domain better. However, in practice we find that sparse lattices already work well.


3.2 Trilinear interpolation
Suppose is a lattice approximation of constructed as before, then given a function , we can use the standard trilinear interpolation to extend to the point cloud . Assume lies inside a cubic cell of the lattice . Denote where , and
then
is the trilinear interpolation of on .
4 Computing Harmonic and Conformal Maps to Spheres
By part (c)(d) of Theorem 2.5, in the spherical case harmonic maps and conformal maps are really the same. This section solves the following problem of computing harmonic and conformal maps.
Problem 4.1
Assume that is a genus 0 closed smooth surface embedded in . Given a point cloud approximation of , how to compute harmonic diffeomorphisms, i.e., conformal diffeomorphisms from to the unit sphere?
4.1 Algorithm
Our method is smoothly adapted from Gu-Yau’s method [24] for computing harmonic maps to spheres. First we pick a lattice approximation as in Section 3, and then
-
(1)
compute the (approximated) discrete harmonic map , and
-
(2)
extend to by trilinear interpolation, and then do a normalization and get an approximation of a harmonic map from to the unit sphere.
Step (2) is pretty clear and simple, so let us discuss the details of step (1). Recall that a discrete map from to is harmonic if it is a critical point of the energy
If the edge length is small, , and the discrete energy is approximated by
So for simplicity we will minimize instead of to compute the approximation of the discrete harmonic map. Since
a critical point of satisfies that for any
i.e.,
| (2) |
where denotes the tangential component of , i.e., the orthogonal projection of to the plane . We view a map satisfying equation (2) as an approximation of a discrete harmonic map, and wish to compute it by the following discrete heat flow on
We can simply solve the above ODE by the explicit Euler’s method, with a normalization after each iteration to keep that all the points are on the unit sphere. More specifically, if the step size is we have that
where .
Two harmonic maps to a sphere can differ by a Möbius transformation. So a smooth harmonic map to a sphere is not unique, and would have large distortion if most of the mass is concentrated near a point of the sphere. To avoid such big distortion, we add a correction mapping in each iteration. Here the correction mapping first translate all the points ’s in to make the center of mass be at the origin, and then do a normalization . Now the modified iteration is
| (3) |
and we have the following algorithm.
Input: A point cloud in
Output: A harmonic map from to the unit sphere
4.2 Numerical Examples
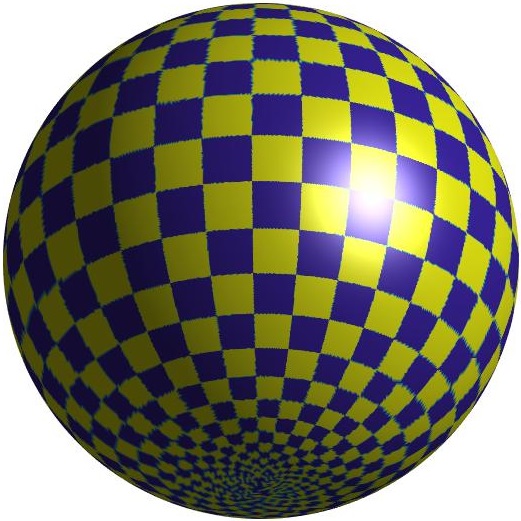
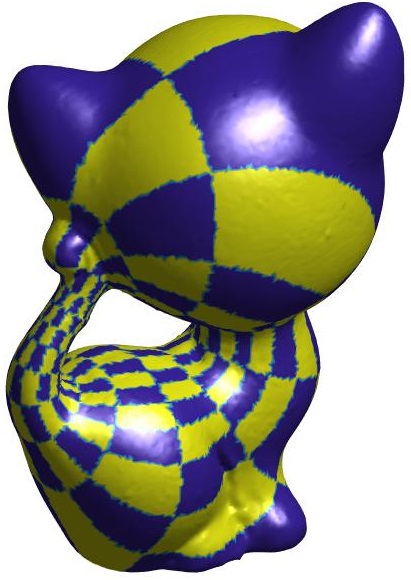
See the two numerical examples in Figure 2 and Figure 3.



5 Computing Harmonic and Conformal Maps to Rectangles
This section solves the following problem on computing harmonic and conformal maps.
Problem 5.1
Assume that is a smooth surface embedded in , and is homeomorphic to a closed disk, and are 4 ordered arcs on divided by 4 points on . Now we are given the data such that is a point cloud approximating , and is a subset of approximating . Here are two computational problems.
-
(1)
Compute the harmonic map for a given such that
(4) (5) (6) (7) -
(2)
Find a positive number and a conformal map such that the above boundary conditions (4)(5)(6)(7) are satisfied.
We will first discuss the harmonic maps in Section 5.1, and then discuss the conformal maps in Section 5.2.
5.1 Algorithm for Harmonic Maps
First we construct a lattice approximation of as in Section 3, and let be the lattice approximation of , where consists of the 8 vertices of the cubic cell of containing . Then we would like to
-
(1)
compute the (constrained) discrete harmonic map , such that
and
-
(2)
extend to by trilinear interpolation, and then is our approximation of the desired harmonic map.
Step (2) is clear and simple. Computing in step (1) amounts to solve the following 2 systems of linear equations
| (8) |
These two equations can be solved efficiently by the preconditioned conjugate gradient method.
In a summary we have the following Algorithm 2.
Input: A point cloud in as an approximation of a surface , and 4 subsets as approximations of 4 boundary arcs of , and a parameter .
Output: A harmonic map from to the rectangle .
5.2 Algorithm for Conformal Maps
Assume is the discrete harmonic map from the lattice approximation to the rectangle . To compute conformal maps, we only need to find a proper edge length such that the computed discrete harmonic map approximates a conformal mapping. Inspired by part (a) of Theorem 2.6, we compute the conformal map by minimizing over . If is the minimizer, then would approximate a conformal map.
Our method is summarized as Algorithm 3.
Input: A point cloud in as an approximation of a surface , and 4 subsets as approximations of 4 boundary arcs of .
Output: A parameter , and a conformal map from to the rectangle .
5.3 Numerical Examples
Here are two numerical examples for harmonic maps and conformal maps respectively.








6 Computing Harmonic and Conformal Maps to Flat Tori
This section solves the following problem on computing harmonic and conformal maps.
Problem 6.1
Assume that is a genus 1 closed smooth surface embedded in , and we are given a point cloud approximation of .
-
(1)
How to compute a harmonic map
for a given with ?
-
(2)
How to find the complex number with and the map
such that is conformal?
We will first discuss the harmonic maps in Section 6.1, and then discuss the conformal maps in Section 6.2.
6.1 Algorithm for Harmonic Maps
First we construct a lattice approximation as in Section 3, and then need to
(1) compute the discrete harmonic map from to , or equivalently, to a fundamental domain in , and
(2) extend to by trilinear interpolation, and then represents an approximation of the desired harmonic map.
Step (2) is kind of clear and simple, so let us discuss the details of step (1). First we ”cut” the lattice along two ”loops” , so that we can represent a discrete map from to a torus as a map from to a planar domain in . Secondly we fix the homotopy class of discrete maps , by requiring that corresponds to the translation , and corresponds to the translation . Now computing the discrete harmonic map in the fixed homotopy class amounts to solve a system of complex linear equations. For a vertex that is away from the loops and , the balanced condition (1) gives us that
Things become a bit subtle when the vertex is near a loop. Assume the edge pass through the loop , and is small, and all the other edges adjacent to vertex do not pass through or . Then
where the sign depends on the orientation of and the relative position between and . For such a vertex , the corrected balanced condition should be
Similar corrections should be made for all the edges passing through or . After making all the corrections, we arrived at a system of complex linear equations of the form
| (9) |
where is computed by adding up all the correction terms. The equation (9) can be solved efficiently by the preconditioned conjugate gradient method.
In a summary we have the following Algorithm 4.
Input: A point cloud in as an approximation of a surface , and a parameter with .
Output: A harmonic map from to the flat torus .
6.2 Algorithm for Conformal Maps
Assume that is the discrete harmonic map from the lattice approximation to the flat torus . Inspired by part (a) of Theorem 2.5, we compute the conformal map by minimizing
over the parameter . If is the minimizer, then would approximate a conformal map.
Our method is summarized as Algorithm 5.
Input: A point cloud in as an approximation of a surface .
Output: A parameter with , and a conformal map from to the flat torus .
6.3 Numerical Examples
Here are two numerical examples for harmonic maps and conformal maps respectively.







7 Computing Harmonic and Conformal Maps to Hyperbolic Surfaces
This section solves the following problem on computing harmonic and conformal maps.
Problem 7.1
Assume that is a genus 1 closed smooth surface embedded in , and we are given a point cloud approximation of .
-
(1)
How to compute a harmonic map
for a given closed hyperbolic surface homeomorphic to ?
-
(2)
How to find the discrete subgroup of and the map
such that is conformal?
We will first discuss the harmonic maps in Section 7.1, and then discuss the conformal maps in Section 7.2.
7.1 Algorithm for Harmonic Maps
First we construct a lattice approximation as in Section 3, and then need to
(1) compute the discrete harmonic map from to , or equivalently, to a fundamental domain in the unit disk representation , and
(2) extend to by trilinear interpolation, and then represents an approximation of the desired harmonic map.
Step (2) is kind of clear and simple, so let us discuss the details of step (1). First we need to ”cut” the lattice along ”loops” , so that we can represent a discrete map from to a hyperbolic surface as a map from to a planar domain in the unit disk. Secondly we fix the homotopy class of discrete maps , by requiring that each loop corresponds to a certain deck transformation in .
Now computing the discrete harmonic map in the fixed homotopy class amounts to solve a system of nonlinear equations. For a vertex that is away from any loop , the balanced condition (1) gives us that
where denotes the unit tangent vector in indicating the direction to point . Things become subtle when the vertex is near some loop . Assume the edge pass through the loop , and is small. Then
where is a deck transformation in , which is determined by
-
(1)
the choice of the loops , and
-
(2)
the choice of ’s, and
-
(3)
the relative position between and .
Properly choosing ’s and computing ’s are involved, particularly for higher genus surfaces. One need to use polygonal representations for higher genus surfaces, and parameterizations of the deformation spaces of . See [72][73] for references. Once we computed all the ’s, it remains to solve the following system of nonlinear equations.
| (10) |
The existence and uniqueness of the solution is guaranteed by Theorem 2.10. Notice that equation (10) indicates that is the hyperbolic center of mass of ’s where goes over all the neighbors of . So one can use the so-called center of mass method to solve equation (10). This is an iterating method where in each iteration is replaced by the mass-center of its neighbors , i.e., the -th function is determined by
It has been proved by Gaster-Loustau-Monsaingeon [59] that the center of mass method will converge to the unique discrete harmonic map. But the disadvantage is that there is no direct way to compute a hyperbolic mass-center and this iteration is slow. In our numerical experiments, we use the so-called cosh-center of mass method introduced also in Gaster-Loustau-Monsaingeon’s paper [59]. Instead of minimizing the exact discrete Dirichlet energy, we minimize
which is a good approximation of the discrete Dirichlet energy if all the edges lengths are small. The balanced condition for critical points of the new energy is
and the induced iterating formula is
| (11) |
The miracle is that such -center of mass defined as in equation (11) can be computed directly. Using the hyperboloid model
the -center of points is shown, in [59], to be
where is computed as vectors in , and is the radial projection to .
In a summary we have the following Algorithm 6.
Input: A point cloud in as an approximation of a surface , and a hyperbolic surface .
Output: A harmonic map from to the hyperbolic surface .
7.2 Algorithm for Conformal Maps
Assume that is the discrete harmonic map from the lattice approximation to the hyperbolic surface . Inspired by part (a) of Theorem 2.5, we compute the conformal map by minimizing
over the deformation space of . If is the minimizer, then would approximate a conformal map. Our numerical experiments used Maskit’s nice parameterization of the deformation space of for genus 2 surfaces [72]. Maskit also proposed methods of parameterizing for any genus hyperbolic surfaces using Fenchel-Nielsen coordinates [73].
Our method is summarized as Algorithm 7.
Input: A point cloud in as an approximation of a surface .
Output: A hyperbolic surface and a conformal map from to the hyperbolic surface .
7.3 Numerical Examples
Here are numerical examples for harmonic maps and conformal maps on genus 2 surfaces.








References
- [1] Patrice Koehl and Joel Hass. Automatic alignment of genus-zero surfaces. IEEE transactions on pattern analysis and machine intelligence, 36(3):466–478, 2013.
- [2] Xianfeng Gu, Yalin Wang, Tony F Chan, Paul M Thompson, and Shing-Tung Yau. Genus zero surface conformal mapping and its application to brain surface mapping. IEEE transactions on medical imaging, 23(8):949–958, 2004.
- [3] Doug M Boyer, Yaron Lipman, Elizabeth St Clair, Jesus Puente, Biren A Patel, Thomas Funkhouser, Jukka Jernvall, and Ingrid Daubechies. Algorithms to automatically quantify the geometric similarity of anatomical surfaces. Proceedings of the National Academy of Sciences, 108(45):18221–18226, 2011.
- [4] Wei Hong, Xianfeng Gu, Feng Qiu, Miao Jin, and Arie Kaufman. Conformal virtual colon flattening. In Proceedings of the 2006 ACM symposium on Solid and physical modeling, pages 85–93, 2006.
- [5] Lok Ming Lui, Sheshadri Thiruvenkadam, Yalin Wang, Paul M Thompson, and Tony F Chan. Optimized conformal surface registration with shape-based landmark matching. SIAM Journal on Imaging Sciences, 3(1):52–78, 2010.
- [6] Yaron Lipman and Thomas Funkhouser. Möbius voting for surface correspondence. ACM Transactions on Graphics (TOG), 28(3):1–12, 2009.
- [7] Vladimir G Kim, Yaron Lipman, and Thomas Funkhouser. Blended intrinsic maps. ACM transactions on graphics (TOG), 30(4):1–12, 2011.
- [8] Yousuf Soliman, Dejan Slepčev, and Keenan Crane. Optimal cone singularities for conformal flattening. ACM Transactions on Graphics (TOG), 37(4):1–17, 2018.
- [9] Haggai Maron, Meirav Galun, Noam Aigerman, Miri Trope, Nadav Dym, Ersin Yumer, Vladimir G Kim, and Yaron Lipman. Convolutional neural networks on surfaces via seamless toric covers. ACM Trans. Graph., 36(4):71–1, 2017.
- [10] Heli Ben-Hamu, Haggai Maron, Itay Kezurer, Gal Avineri, and Yaron Lipman. Multi-chart generative surface modeling. ACM Transactions on Graphics (TOG), 37(6):1–15, 2018.
- [11] Josef Kittler, Paul Koppen, Philipp Kopp, Patrik Huber, and Matthias Rätsch. Conformal mapping of a 3d face representation onto a 2d image for cnn based face recognition. In 2018 International Conference on Biometrics (ICB), pages 124–131. IEEE, 2018.
- [12] Xin Li, Xianfeng Gu, and Hong Qin. Surface mapping using consistent pants decomposition. IEEE Transactions on Visualization and Computer Graphics, 15(4):558–571, 2009.
- [13] Ulrich Pinkall and Konrad Polthier. Computing discrete minimal surfaces and their conjugates. Experimental mathematics, 2(1):15–36, 1993.
- [14] Anand A Joshi, David W Shattuck, Paul M Thompson, and Richard M Leahy. Surface-constrained volumetric brain registration using harmonic mappings. IEEE transactions on medical imaging, 26(12):1657–1669, 2007.
- [15] Ruo Li, Wenbin Liu, Tao Tang, and Pingwen Zhang. Moving mesh finite element methods based on harmonic maps. In Scientific computing and applications, pages 143–156. 2001.
- [16] Yang Wang, Mohit Gupta, Song Zhang, Sen Wang, Xianfeng Gu, Dimitris Samaras, and Peisen Huang. High resolution tracking of non-rigid motion of densely sampled 3d data using harmonic maps. International Journal of Computer Vision, 76(3):283–300, 2008.
- [17] Xiaohu Guo, Xin Li, Yunfan Bao, Xianfeng Gu, and Hong Qin. Meshless thin-shell simulation based on global conformal parameterization. IEEE transactions on visualization and computer graphics, 12(3):375–385, 2006.
- [18] Xin Li, Xiaohu Guo, Hongyu Wang, Ying He, Xianfeng Gu, and Hong Qin. Meshless harmonic volumetric mapping using fundamental solution methods. IEEE Transactions on Automation Science and Engineering, 6(3):409–422, 2009.
- [19] Ting Wei Meng and Lok Ming Lui. The theory of computational quasi-conformal geometry on point clouds. arXiv preprint arXiv:1510.05104, 2015.
- [20] Jian Liang and Hongkai Zhao. Solving partial differential equations on point clouds. SIAM Journal on Scientific Computing, 35(3):A1461–A1486, 2013.
- [21] Gary Pui-Tung Choi, Kin Tat Ho, and Lok Ming Lui. Spherical conformal parameterization of genus-0 point clouds for meshing. SIAM Journal on Imaging Sciences, 9(4):1582–1618, 2016.
- [22] Ting Wei Meng, Gary Pui-Tung Choi, and Lok Ming Lui. Tempo: Feature-endowed teichmuller extremal mappings of point clouds. SIAM Journal on Imaging Sciences, 9(4):1922–1962, 2016.
- [23] Zhen Li, Zuoqiang Shi, and Jian Sun. Compute quasi-conformal map on point cloud by point integral method. 2017.
- [24] Xianfeng Gu and Shing-Tung Yau. Computing conformal structures of surfaces. Communications in Information and Systems, 2(2):121–146, 2002.
- [25] Xianfeng Gu and Shing-Tung Yau. Global conformal surface parameterization. In Proceedings of the 2003 Eurographics/ACM SIGGRAPH symposium on Geometry processing, pages 127–137, 2003.
- [26] Bruno Lévy, Sylvain Petitjean, Nicolas Ray, and Jérome Maillot. Least squares conformal maps for automatic texture atlas generation. ACM transactions on graphics (TOG), 21(3):362–371, 2002.
- [27] Yaron Lipman. Bounded distortion mapping spaces for triangular meshes. ACM Transactions on Graphics (TOG), 31(4):1–13, 2012.
- [28] Lok Ming Lui, Ka Chun Lam, Shing-Tung Yau, and Xianfeng Gu. Teichmuller mapping (t-map) and its applications to landmark matching registration. SIAM Journal on Imaging Sciences, 7(1):391–426, 2014.
- [29] Burt Rodin, Dennis Sullivan, et al. The convergence of circle packings to the riemann mapping. Journal of Differential Geometry, 26(2):349–360, 1987.
- [30] Bennett Chow, Feng Luo, et al. Combinatorial ricci flows on surfaces. Journal of Differential Geometry, 63(1):97–129, 2003.
- [31] Monica K Hurdal and Ken Stephenson. Discrete conformal methods for cortical brain flattening. Neuroimage, 45(1):S86–S98, 2009.
- [32] Liliya Kharevych, Boris Springborn, and Peter Schröder. Discrete conformal mappings via circle patterns. ACM Transactions on Graphics (TOG), 25(2):412–438, 2006.
- [33] Philip L Bowers and Kenneth Stephenson. Uniformizing Dessins and BelyiMaps via Circle Packing, volume 170. American Mathematical Soc., 2004.
- [34] Philip L Bowers and Monica K Hurdal. Planar conformal mappings of piecewise flat surfaces. In Visualization and mathematics III, pages 3–34. Springer, 2003.
- [35] Feng Luo. Combinatorial yamabe flow on surfaces. Communications in Contemporary Mathematics, 6(05):765–780, 2004.
- [36] Alexander I Bobenko, Ulrich Pinkall, and Boris A Springborn. Discrete conformal maps and ideal hyperbolic polyhedra. Geometry & Topology, 19(4):2155–2215, 2015.
- [37] Xianfeng David Gu, Feng Luo, Jian Sun, Tianqi Wu, et al. A discrete uniformization theorem for polyhedral surfaces. Journal of differential geometry, 109(2):223–256, 2018.
- [38] Xianfeng Gu, Ren Guo, Feng Luo, Jian Sun, Tianqi Wu, et al. A discrete uniformization theorem for polyhedral surfaces ii. Journal of differential geometry, 109(3):431–466, 2018.
- [39] Jian Sun, Tianqi Wu, Xianfeng Gu, and Feng Luo. Discrete conformal deformation: algorithm and experiments. SIAM Journal on Imaging Sciences, 8(3):1421–1456, 2015.
- [40] Boris Springborn. Hyperbolic polyhedra and discrete uniformization. arXiv preprint arXiv:1707.06848, 2017.
- [41] Zheng-Xu He and Oded Schramm. Thec∞-convergence of hexagonal disk packings to the riemann map. Acta mathematica, 180(2):219–245, 1998.
- [42] David Gu, Feng Luo, and Tianqi Wu. Convergence of discrete conformal geometry and computation of uniformization maps. Asian Journal of Mathematics, 23(1):21–34, 2019.
- [43] Feng Luo, Tianqi Wu, and Jian Sun. Discrete conformal geometry of polyhedral surfaces and its convergence. preprint, 2020.
- [44] Ulrike Bücking. -convergence of conformal mappings for conformally equivalent triangular lattices. Results in Mathematics, 73(2):84, 2018.
- [45] Yves Colin De Verdière. Un principe variationnel pour les empilements de cercles. Inventiones mathematicae, 104(1):655–669, 1991.
- [46] Ren Guo. Local rigidity of inversive distance circle packing. Transactions of the American Mathematical Society, 363(9):4757–4776, 2011.
- [47] David Glickenstein. A combinatorial yamabe flow in three dimensions. Topology, 44(4):791–808, 2005.
- [48] David Glickenstein. A maximum principle for combinatorial yamabe flow. Topology, 44(4):809–825, 2005.
- [49] David Glickenstein et al. Discrete conformal variations and scalar curvature on piecewise flat two-and three-dimensional manifolds. Journal of Differential Geometry, 87(2):201–238, 2011.
- [50] Christopher J Bishop. Conformal mapping in linear time. Discrete & Computational Geometry, 44(2):330–428, 2010.
- [51] Tobin A Driscoll and Stephen A Vavasis. Numerical conformal mapping using cross-ratios and delaunay triangulation. SIAM Journal on Scientific Computing, 19(6):1783–1803, 1998.
- [52] Kenneth Stephenson. Introduction to circle packing: The theory of discrete analytic functions. Cambridge University Press, 2005.
- [53] Lloyd N Trefethen and Tobin A Driscoll. Schwarz-christoffel mapping in the computer era. In Proceedings of the International Congress of Mathematicians, volume 3, pages 533–542. Citeseer, 1998.
- [54] Mathieu Desbrun, Mark Meyer, and Pierre Alliez. Intrinsic parameterizations of surface meshes. In Computer graphics forum, volume 21, pages 209–218. Wiley Online Library, 2002.
- [55] Mei-Heng Yueh, Wen-Wei Lin, Chin-Tien Wu, and Shing-Tung Yau. An efficient energy minimization for conformal parameterizations. Journal of Scientific Computing, 73(1):203–227, 2017.
- [56] Nadav Dym, Raz Slutsky, and Yaron Lipman. Linear variational principle for riemann mappings and discrete conformality. Proceedings of the National Academy of Sciences, 116(3):732–737, 2019.
- [57] Keenan Crane, Ulrich Pinkall, and Peter Schröder. Robust fairing via conformal curvature flow. ACM Transactions on Graphics (TOG), 32(4):1–10, 2013.
- [58] Tianqi Wu, Xianfeng Gu, and Jian Sun. Rigidity of infinite hexagonal triangulation of the plane. Transactions of the American Mathematical Society, 367(9):6539–6555, 2015.
- [59] Jonah Gaster, Brice Loustau, and Léonard Monsaingeon. Computing discrete equivariant harmonic maps. arXiv preprint arXiv:1810.11932, 2018.
- [60] Jonah Gaster, Brice Loustau, and Léonard Monsaingeon. Computing harmonic maps between riemannian manifolds. arXiv preprint arXiv:1910.08176, 2019.
- [61] Y Colin de Verdière. Comment rendre géodésique une triangulation d’une surface? L’Enseignement Mathématique, 37:201–212, 1991.
- [62] Nicholas J Korevaar and Richard M Schoen. Sobolev spaces and harmonic maps for metric space targets. Communications in Analysis and Geometry, 1(4):561–659, 1993.
- [63] Jürgen Jost and Leonard Todjihounde. Harmonic nets in metric spaces. Pacific Journal of Mathematics, 231(2):437–444, 2007.
- [64] Mu-Tao Wang. Generalized harmonic maps and representations of discrete groups. Communications in analysis and geometry, 8(3):545–563, 2000.
- [65] Hiroyasu Izeki and Shin Nayatani. Combinatorial harmonic maps and discrete-group actions on hadamard spaces. Geometriae Dedicata, 114(1):147–188, 2005.
- [66] James Eells and Bent Fuglede. Harmonic maps between Riemannian polyhedra, volume 142. Cambridge university press, 2001.
- [67] Bent Fuglede. Homotopy problems for harmonic maps to spaces of nonpositive curvature. Communications in Analysis and Geometry, 16(4):681–733, 2008.
- [68] Joel Hass and Peter Scott. Simplicial energy and simplicial harmonic maps. Asian Journal of Mathematics, 19(4):593–636, 2015.
- [69] Richard Schoen and Shing-Tung Yau. Existence of incompressible minimal surfaces and the topology of three dimensional manifolds with non-negative scalar curvature. Annals of Mathematics, 110(1):127–142, 1979.
- [70] James Eells and Luc Lemaire. Two reports on harmonic maps. World Scientific, 1995.
- [71] Toru Kajigaya and Ryokichi Tanaka. Uniformizing surfaces via discrete harmonic maps. arXiv preprint arXiv:1905.05427, 2019.
- [72] Bernard Maskit. New parameters for fuchsian groups of genus 2. Proceedings of the American Mathematical Society, 127(12):3643–3652, 1999.
- [73] Bernard Maskit. Matrices for fenchel-nielsen coordinates. RECON no. 20010088230.; Annales Academiae Scientiarum Fennicae: Mathmatica, 26(2):267–304, 2001.