Chain of Visual Perception: Harnessing Multimodal Large
Language Models for Zero-shot Camouflaged Object Detection
Abstract.
In this paper, we introduce a novel multimodal camo-perceptive framework (MMCPF) aimed at handling zero-shot Camouflaged Object Detection (COD) by leveraging the powerful capabilities of Multimodal Large Language Models (MLLMs). Recognizing the inherent limitations of current COD methodologies, which predominantly rely on supervised learning models demanding extensive and accurately annotated datasets, resulting in weak generalization, our research proposes a zero-shot MMCPF that circumvents these challenges. Although MLLMs hold significant potential for broad applications, their effectiveness in COD is hindered and they would make misinterpretations of camouflaged objects. To address this challenge, we further propose a strategic enhancement called the Chain of Visual Perception (CoVP), which significantly improves the perceptual capabilities of MLLMs in camouflaged scenes by leveraging both linguistic and visual cues more effectively. We validate the effectiveness of MMCPF on five widely used COD datasets, containing CAMO, COD10K, NC4K, MoCA-Mask and OVCamo. Experiments show that MMCPF can outperform all existing state-of-the-art zero-shot COD methods, and achieve competitive performance compared to weakly-supervised and fully-supervised methods, which demonstrates the potential of MMCPF. The Github link of this paper is https://github.com/luckybird1994/MMCPF.
1. Introduction
Aimed at accurately identifying objects that blend seamlessly into their surroundings, Camouflaged Object Detection (COD) focuses on detecting those that are deliberately disguised. Yet, the field is hampered by a reliance on supervised learning models (Fan et al., 2020; Mondal, 2020; Zhai et al., 2021; Lv et al., 2021; Yang et al., 2021b; Fan et al., 2022; Zhong et al., 2022; Zhang et al., 2022b; Pang et al., 2022; Bi et al., 2022; Zhang et al., 2022a; Hu et al., 2023; Ji et al., 2023; Zhuge et al., 2023), which demand extensive, accurately annotated COD datasets. However, camouflaged objects can be diverse, ranging from animals in various environments to a variety of man-made items. Some camouflaged objects may be rare or difficult to gather sufficient labeled data for training. In practical applications, new types of camouflage may continually emerge. Therefore, training models solely on fixed, small-scale datasets may limit their generalizability, rendering them effective in certain scenarios but ineffective in others. Specifically, as shown in Table. 1, when transferring the typical fully-supervised COD method ERRNet (Ji et al., 2022) to the new camouflaged scene, such as video camouflaged object detection (VCOD) scene, their performance significantly decreases, even falling below that of the weakly-supervised COD method WSCOD (He et al., 2023) and the zero-shot VCOD method MG (Yang et al., 2021a). Therefore, how to design a novel COD framework in the zero-shot manner with potential for generalizability is a matter worth exploring.
The first reason with the limited generalizability of current COD network designs arises from the small scale of training data, which tends to lead the networks to overfit in specific scenarios. This overfitting restricts their ability to generalize effectively in new environments. Additionally, existing COD network designs stem from their limited model capacity, which restricts their ability to perceive camouflaged objects across varied environments. In recent years, natural language processing (NLP) has been profoundly transformed by the advent of large language models (LLMs). These foundational models have demonstrated exceptional generalizability because they possess strong model capacity and millions or even tens of millions of training data. The fusion of LLMs with vision systems has led to the emergence of Multimodal Large Language Models (MLLMs) (Huang et al., 2023b; Zhu et al., 2023; Li et al., 2023d; Dai et al., 2023; Zhang et al., 2023c; Zhao et al., 2023; Chen et al., 2023), such as LLaVA (Liu et al., 2023a) and GPT-4V (OpenAI, 2023). Leveraging the generalization capabilities of MLLMs, many researchers have explored and designed various zero-shot frameworks to address diverse visual tasks (Peng et al., 2023; Pi et al., 2023; Lai et al., 2023; Zhang et al., 2023b; Liu et al., 2023b).
| CAMO | MoCA-Mask | ||
|---|---|---|---|
| Methods | Setting | ||
| MG (ICCV2021) | Zero-shot | - | 0.168 |
| ERRNet (PR2022) | Fully-supervised | 0.679 | 0.094 |
| WSCOD (AAAI2023) | Weakly-supervised | 0.641 | 0.121 |
| Ours | Zero-shot | 0.680 | 0.196 |

Therefore, in this paper, building upon the generalizability of MLLMs in different scenarios, we are inspired to explore whether MLLMs can maintain their efficacy in COD scenes and design a novel MLLM-based zero-shot COD framework, namely multimodal camo-perceptive framework (MMCPF). It is imperative to underscore that the primary objective of this investigation is not to retrain MLLMs using adapters or tuning mechanisms (Ma and Wang, 2023; Zhang and Liu, 2023; Pu et al., 2024) on the small-scale COD dataset, thereby compromising the generalizability inherent in MLLMs (Ke et al., 2023). What we aim to explore is whether it’s possible to design a novel zero-shot framework that directly leverages the inherent model capacity of MLLMs to perceive camouflage scenarios without the annotated COD training dataset.
The development of zero-shot MMCPF faces two significant challenges: The first is how to perceive and locate camouflaged objects, and the second is how to generate the binary mask of camouflaged objects. To preliminarily address these challenges, MMCPF consists of two foundational models: one is MLLM, which is responsible for perceiving and locating the coordinates of the camouflaged object. The other is a promptable visual foundation model (VFM) like SAM (Kirillov et al., 2023a), which takes the coordinates outputted by MLLM to generate a binary mask. However, when we attempt to ask GPT-4V (OpenAI, 2023) about the presence of a camouflaged object in Fig. 1, we regret to find that the MLLM outputs some wrong contents. Therefore, a question raised: Can even a powerful model like GPT-4V not effectively handle camouflaged scenes? How can we make zero-shot MMCPF work?
Upon identifying the aforementioned issues, we design the chain of visual perception (CoVP) within MMCPF, which can not only help enhance MLLM’s perception of camouflaged scenes and correctly output location coordinates, but also improve these coordinates to prompt VFM for mask generation. Specifically, our proposed CoVP improves the performance of MMCPF from both linguistic and visual perspectives. For linguistic perspective, inspired by Chain of Thought (CoT) techniques (Wei et al., 2022; Fu et al., 2023) used in LLMs, we have enhanced the perceptual abilities of MLLMs for camouflaged scenes. In general, CoT can effectively help LLMs solve some complex downstream tasks under the zero-shot manner. However, how to design these reasoning mechanisms effectively for MLLMs remains an area to be explored. The work (Cao et al., 2023) attempts to facilitate visual reasoning in MLLMs by artificially providing semantic information about a given image in the text prompt. But in the COD task, the semantic and location information of the camouflaged object needs to be perceived and discovered by the model itself, rather than being artificially provided. That is to say, the method presented in paper (Cao et al., 2023) is not directly applicable to MMCPF. Therefore, in this paper, we summarize three critical aspects when prompting the MLLM to perceive the relationship between the camouflaged object and its surroundings, thereby enhancing the accuracy of MLLMs in locating camouflaged objects.
For visual perspective, considering the fact that the integration of additional visual information into MLLMs introduces unique challenges not encountered with text-only LLMs. These challenges are particularly pronounced in visually complex scenarios involving camouflage. While we have implemented a reasoning mechanism within the text input to assist MLLMs in recognizing camouflaged objects, this does not entirely assure the accuracy of their visual localization capabilities. Therefore, in MMCPF, it is crucial to consider how to improve the uncertain pixel location from MLLMs to better prompt VFMs to generate accurate binary mask results. To address this challenge, we design a mechanism called visual completion. As illustrated in Table. 1, with the help of CoVP, MMCPF outperforms those published in 2023 with weakly-supervised settings, demonstrating remarkable potential for a zero-shot framework. Notably, MMCPF also surpasses fully-supervised methods published in 2022.
In summary, the key contributions are listed as follows:
-
•
We propose MMCPF to preliminarily explore the performance cap of MLLMs to camouflaged scenes in the zero-shot manner. We hope MMCPF can potentially inspire researchers to design COD framework from a fresh perspective without the needing of training process and annotated COD training datasets, which is more flexible.
-
•
We introduce CoVP in MMCPF, which enhance MLLM’s perception of camouflaged scenes from both linguistic and visual perspectives and make MMCPF work.
-
•
We validate the proposed MMCPF on three widely used COD datasets CAMO (Le et al., 2019), COD10K (Fan et al., 2020) and NC4K (Lv et al., 2021), and one VCOD dataset MoCA-Mask (Cheng et al., 2022) and one Open-Vocabulary COD dataset OVCamo (Pang et al., 2023). Its effective zero-shot performance verifies the effectiveness of our ideas.
2. Related Work
2.1. Multimodal Large Language Model
Prompted by the powerful generalized ability of LLMs (Devlin et al., 2019; Lu et al., 2019; Brown et al., 2020; Zhang et al., 2023a) in NLP, VFMs (Oquab et al., 2023; Kirillov et al., 2023b; Radford et al., 2021; Li et al., 2022) have emerged. The integration of LLMs and VFMs has facilitated the advancement of MLLMs (Huang et al., 2023b; Zhu et al., 2023; Li et al., 2023d; Dai et al., 2023; Zhang et al., 2023c; Zhao et al., 2023; Chen et al., 2023; Liu et al., 2023a; OpenAI, 2023; Li et al., 2023b). MLLMs show case impressive visual understanding through end-to-end training techniques that directly decode visual and text tokens in a unified manner. These foundational models, like GPT, SAM and LLaVA, demonstrated the immense potential of these large-scale, versatile models, trained on extensive datasets to achieve unparalleled adaptability across a wide range of tasks. This paradigm shift, characterized by significant strides in representation learning, has spurred the exploration of task-agnostic models, propelling research into both their adaptation methodologies and the intricacies of their internal mechanisms.
In the field of NLP, to migrate LLMs to downstream tasks without impacting the LLM’s inherent performance, In-context learning (Dong et al., 2022) is a widely used technique. A particularly influential approach within In-context learning is the CoT (Wei et al., 2022; Kojima et al., 2022; Fu et al., 2023). CoT, by designing a series of reasoning steps, guides the LLM to focus on specific content at each step, thereby further stimulating the model’s innate logical reasoning capabilities. Specifically, these works have discovered that by prompting LLMs with designed directives, such as “let’s think step by step”, the reasoning abilities of the LLMs can be further improved and enhanced.
As a field that is more mature than MLLM, LLM has shown that models can be effectively migrated to various downstream tasks in a zero-shot manner, provided that the correct prompting mechanisms are in place. Therefore, to further advance the development of MLLM, our paper explores the upper limits of MLLM performance in visually challenging tasks, specifically COD. Unlike existing methods that use re-training or tuning to migrate MLLMs to downstream tasks (Peng et al., 2023; Pi et al., 2023; Lai et al., 2023), our paper aims to explore how to prompt the MLLMs to stimulate its inherent perception abilities for camouflaged scenes. To this end, we propose CoVP, which first identifies key aspects to consider when inputting language text prompts to enhance MLLM’s understanding of camouflaged scenes. Further, we highlight how to utilize MLLM’s uncertain visual outputs and, from a visual completion standpoint, enhance MLLM’s capability to capture camouflaged objects.

2.2. Camouflaged Object Detection
In the past years, there has been significant effort in the COD task (Fan et al., 2020; Mondal, 2020; Zhai et al., 2021; Lv et al., 2021; Yang et al., 2021b; Li et al., 2019; Fan et al., 2022; Zhong et al., 2022; Pang et al., 2022; Bi et al., 2022; Zhang et al., 2022a; Hu et al., 2023; Ji et al., 2023; Zhuge et al., 2023). The technical frameworks for these COD methods can be categorized into two types: CNN-based and Transformer-based approaches. Although the structures of these methods may differ, their core lies in designing advanced network modules or architectures capable of exploring discriminative features. While these methods have achieved impressive performance, the networks lack generality and are task-specific, which limits their generalizability. This means that while they are highly effective for specific tasks, their adaptability to a wide range of different tasks is constrained.
The emergence of a series of foundational models in recent times has signaled to computer vision researchers that it is possible to solve a variety of downstream vision tasks using a single, large-scale model. This trend highlights the potential of leveraging powerful, versatile models that have been trained on extensive datasets, enabling them to handle diverse and complex visual challenges. In line with the trend of technological advancement, this paper explores the generalization capabilities of visual foundational models. We design the MMCPF to generalize the foundational model to the COD task in a zero-shot manner. It’s important to highlight that this paper does not employ methods such as re-training, adapters, or tuning to update the parameters of the visual foundational model for adaptation to the COD task. Instead, we explore how to enhance the perception abilities of the visual foundational model in camouflaged scenes through prompt engineering from both linguistic and visual perspectives, without altering its inherent capabilities.
Existing works like ZSCOD (Li et al., 2023a) and GenSAM (Hu et al., 2024) are also attempting to design a zero-shot COD framework. The pipline of ZSCOD may seem somewhat contrived, potentially limiting its adaptability to real-world scenarios. Specifically, this method artificially divides the COD10K dataset into seen and unseen categories and then trains the network. This undoubtedly leads to the risk of information leakage, thus preventing a true evaluation of whether the network has generalizability. Moreover, its performance to unknown scenarios is very weak, raising concerns among researchers about the robustness of their networks. GenSAM (Hu et al., 2024) also leverages MLLM and VFM to design a zero-shot COD framework. However, a flaw of this framework is that it makes additional modifications to the foundation model (Clip-Surgery (Li et al., 2023c)) used in the framework. Specifically, to enhance the network’s ability to filter noise from camouflaged images and accurately identify foreground pixels, GenSAM introduces an additional attention mechanism to the existing well-established framework. This approach is somewhat similar to an Adapter operation. This could potentially affect the generalizability that the foundation model originally had to some extent. Compared to these two methods, our MMCPF is more flexible in its setup. In MMCPF, we do not make any structural modifications to the MLLM and VFM. Instead, we enhance the MLLM’s perceptual capabilities for camouflaged scenes through the design of the CoVP. This approach ensures the maximal preservation of the MLLM’s inherent generalization ability, and achieve superior performance.
3. Method
3.1. Framework Overview
In Fig. 2, our proposed MMCPF is a promptable framework, which is the first framework to successfully generalize the MLLM to the camouflaged scene. Given an image containing the camouflaged scene, prompting the MMCPF with the text , such as “Please find a camouflaged object in this image and provide me with its exact location coordinates”, the MMCPF would locate the camouflaged object at position and generate the corresponding mask .

To achieve the above purpose, we state that MMCPF needs two foundational models. The first is the MLLM, which can accept the user instruction and output the corresponding result, such as the coordinate information of the target object. To further quantitatively evaluate the performance of MLLM, the second foundational model is the promptable VFM, which can accept the output from MLLM as the prompt, and generate the final mask . Note that, in MMCPF, both MLLM and VFM are frozen.
In MMCPF, only having MLLM and VFM, despite their powerful capabilities, may still be insufficient to handle the COD task effectively. Specifically, in Fig. 2, using just vanilla text prompts to query the MLLM might yield meaningless results, contributing nothing to the accurate location of camouflaged objects. Additionally, in Fig. 3, the positional coordinates output by the MLLM may carry a degree of uncertainty, encompassing only a part of the camouflaged object. Specifically, for the localization of camouflaged objects, MLLM typically outputs the coordinates of the top-left and bottom-right corners. We have observed that these coordinates do not always fall within the interior of the camouflaged object and their central point only lands on the edge of the camouflaged object sometimes. Consequently, if these coordinates are directly used as point prompts for the VFM, the resulting mask might be incomplete or fragmented. Therefore, to address the above problems, we propose CoVP, which enhance MLLM’s perception of camouflaged scenes from both linguistic and visual perspectives.
3.2. Chain of Visual Perception
Images in camouflaged scenes obviously present visual challenges, making it difficult for MLLMs to detect camouflaged objects. The challenges primarily encompass two aspects. Firstly, for MLLM, we stimulate its understanding of visual content in an image through language. However, designing language prompts suitable for camouflaged scenes remains an area to be explored. The existing work (Cao et al., 2023) attempts to enhance the visual perception capabilities of MLLM by providing semantic information about an image, which contradicts the definition of the COD task, and thus cannot be directly applied. Therefore, our first task is to design how language can be used to enhance the visual perception ability of MLLM.
Secondly, prompting MLLM to visually perceive an image through language represents a challenging cross-modal task, especially when we attempt to generalize MLLM to visually the challenging COD scene. As visualized in Fig. 3, it’s difficult to completely ensure the accuracy of MLLM’s output. Consequently, we design a visual completion (VC) to further enhance the localization capability of MLLM. Unlike the CoT, which only designs mechanisms at the text input of the LLM to enhance its language reasoning ability, CoVP attempts to improve MLLM’s perception of camouflaged scenes more comprehensively, working at both the input and output and from linguistic and visual perspectives.

3.2.1. Perception Enhanced from Linguistic Aspect
We attempt to design an effective text prompt mechanism from three perspectives to further enhance the ability of MLLM to perceive camouflaged objects. This primarily includes the following aspects: description of the attributes of the target camouflaged object, the angle of polysemy, and the perspective of diversity.
Description of the attribute. When prompting the MLLM to discover a specific camouflaged object, we should encourage the MLLM to pay attention to the potential attributes of that object. This includes two perspectives: internal attributes and external interaction. For the internal attributes of camouflaged objects, we aim to focus the MLLM on their physical and dynamic characteristics. Physical properties might include the camouflaged object’s color, shape, and texture information, which are static attributes. For example, as shown in Fig. 4 and Fig. 5, when we try to include descriptions of these aspects, we find that the MLLM’s ability to perceive camouflaged objects is significantly enhanced.
Dynamic characteristics include the camouflaged object’s patterns and motion information, which might also cause it to blend with its surrounding environment. In Fig. 5, when we attempt to direct the MLLM’s attention to descriptions of these dynamic aspects, its ability to perceive camouflaged objects is further enhanced. It’s important to note that our text prompts do not explicitly give away information about the camouflaged object. For example, we do not use prompts like “The camouflaged object in the image is an orange fox.” Instead, our prompts are designed to subtly guide the MLLM in identifying and understanding the characteristics of the camouflaged object without directly revealing it.
Polysemy of the description. It’s important to consider polysemy when designing prompts. For example, the term “camouflage” can have different interpretations sometimes, where it can also refer to a soldier wearing camouflage clothing. Therefore, we would also design the text prompt such as “This image may contain a concealed object…”. In Fig. 5, when we design text prompts with consideration for polysemy, the ability to perceive camouflaged objects is improved. This observation underscores the importance of crafting prompts that account for different meanings and interpretations, thereby enabling the MLLM to more effectively process and understand the complexities inherent in camouflaged scenes.
Diversity of the description. It’s essential to focus on the diversity of prompts. Given the uncertainty about which type of prompt is most suitable for an MLLM, prompts should be as varied as possible. Moreover, in maintaining diversity, we suggest leveraging the LLM itself to generate prompts with similar meanings. This approach ensures that the prompt texts are as close as possible to the data distribution that the MLLM can effectively process. In Fig. 5, when we take into account the diversity of text prompts, the ability to perceive camouflaged objects is further enhanced. This improvement suggests that incorporating a variety of prompts, which cover different aspects and perspectives, can significantly aid the MLLM in more effectively detecting camouflaged objects.

| CAMO (250 Images) | COD10K (2026 Images) | NC4K (4121 Images) | ||||||||
| Methods | Setting | MAE | MAE | MAE | ||||||
| FSPNet (CVPR2023) | F | 0.799 | 0.856 | 0.050 | 0.735 | 0.851 | 0.026 | 0.816 | 0.879 | 0.035 |
| NCHIT (CVIU2022) | F | 0.652 | 0.784 | 0.088 | 0.591 | 0.792 | 0.049 | 0.710 | 0.830 | 0.058 |
| ERRNet (PR2022) | F | 0.679 | 0.779 | 0.085 | 0.630 | 0.786 | 0.043 | 0.737 | 0.827 | 0.054 |
| WSCOD (AAAI2023) | WS | 0.641 | 0.735 | 0.092 | 0.576 | 0.732 | 0.049 | 0.676 | 0.766 | 0.063 |
| ZSCOD (TIP2023) | ZS | * | * | * | 0.144 | 0.450 | 0.191 | * | * | * |
| GenSAM (AAAI2024) | ZS | 0.655 | 0.730 | 0.117 | 0.584 | 0.731 | 0.069 | 0.665 | 0.754 | 0.087 |
| Ours (Shikra+SAMHQ) | ZS | 0.680 | 0.749 | 0.100 | 0.592 | 0.733 | 0.065 | 0.681 | 0.768 | 0.082 |
3.2.2. Perception Enhanced from Visual Aspect
Through the text prompt we designed, we significantly enhance the MLLM’s visual perception ability in challenging camouflaged scenes, enabling us to preliminarily identify the location of camouflaged objects. However, it’s important to note that the MLLM is initially designed for understanding image content, not for highly precise object localization. As a result, the MLLM’s positioning of camouflaged objects is generally approximate and fraught with uncertainty. This is evident in Fig. 3, where the visualization of the MLLM’s positioning results shows its limitations in accurately locating the entire camouflaged object. Using the MLLM’s output coordinates as direct point prompts for the VFM in segmentation often leads to incomplete results. To tackle this challenge, we explore a solution: enhancing the initial, uncertain coordinates provided by the MLLM to improve its localization accuracy.
In Fig. 3, our goal is to generate additional points similar to the initial central point coordinate in terms of semantics. Prior studies (Truong et al., 2021; Oquab et al., 2023) have shown that self-supervised vision transformer features, such as those from DINOv2, hold explicit information beneficial for semantic segmentation and are effective as KNN classifiers. DINOv2 particularly excels in accurately extracting the semantic content from each image. Hence, we utilize the features extracted by the foundational model DINOv2 to represent the semantic information of each image, denoted as . This approach enables us to more precisely expand upon the initial point coordinates, leveraging the semantic richness of DINOv2’s feature extraction capabilities.
After generating the feature representation of the input image , we obtain the feature vector corresponding to the point . We then facilitate interaction between the feature vector and other point features in to calculate their correlation matrix. Specifically, in the image feature , which contains pixels, the feature representation of each pixel is denoted as , where . The correlation score between and is determined using cosine similarity. Subsequently, we employ a Top-k algorithm to identify the points most semantically similar to . These points are located at position :
| (1) |
where means matrix multiplication. Finally, we further refine the into clustering centers as the positive point prompts for VFM. The point prompts and the image are sent to VFM to predict segmentation results .
4. Experiments
4.1. Datasets and Evaluation Metrics
We employ three public benchmark COD datasets to evaluate the perceptual capabilities of MMCPF in camouflaged scenes. These datasets include CAMO (Le et al., 2019), COD10K (Fan et al., 2020) and NC4K (Lv et al., 2021). CAMO is a subset of the CAMO-COCO, specifically designed for camouflaged object segmentation. COD10K are collected from various photography websites and are classified into 5 super-classes and 69 sub-classes. NC4K features more complex scenarios and a wider range of camouflaged objects. To further demonstrate the generalization capability of our proposed MMCPF, we extend our validation to other datasets which may contain different camouflaged scene, MoCA-Mask (Cheng et al., 2022) and OVCamo (Pang et al., 2023), to assess our method’s performance. We adopt three widely used metrics to evaluate our method: structure-measure () (Fan et al., 2017), weighted F-measure (), and mean absolute error (MAE). To ensure the reproducibility of our MMCPF, thereby positively impacting the community, we select open-source models, Shikra (Chen et al., 2023) and SAM-HQ (Ke et al., 2023) for both the MLLM and VFM.
| MoCA-Mask | ||||
| Methods | Setting | MAE | ||
| SLTNet (CVPR2022) | F | 0.292 | 0.628 | 0.034 |
| PFSNet (CVPR2023) | F | 0.060 | 0.508 | 0.017 |
| ERRNet (PR2022) | F | 0.094 | 0.531 | 0.052 |
| WSCOD (AAAI2023) | WS | 0.121 | 0.538 | 0.041 |
| MG (ICCV2021) | ZS | 0.168 | 0.530 | 0.067 |
| GenSAM (AAAI2024) | ZS | 0.141 | 0.523 | 0.070 |
| Ours (Shikra+SAMHQ) | ZS | 0.196 | 0.569 | 0.031 |
4.2. Comparison with Different Methods
Selecting appropriate comparison methods is crucial to demonstrate the contribution of our proposed MMCPF to the community. The core of our MMCPF is to generalize MLLM and VFM to camouflaged scenes in a zero-shot manner. Since the MLLM and VFM we chose are not specifically designed for camouflaged scenes, we first compare our method with the zero-shot COD method ZSCOD (Li et al., 2023a) and GenSAM (Hu et al., 2024). Secondly, as we do not retrain the MLLM and VFM on camouflaged datasets when generalizing them to camouflaged scenes, it is appropriate to compare our approach with unsupervised COD methods. Unfortunately, we could not find any unsupervised methods specifically designed for the COD task, so we opt for a comparison with the weakly-supervised method WSCOD (He et al., 2023). Finally, we also compare our method with three fully-supervised approaches, including NCHIT (Zhang et al., 2022b), ERRNet (Ji et al., 2022), and FSPNet (Huang et al., 2023a). This comparison not only helps researchers understand the performance level of our paper but also further clarifies our contribution to the field. By setting our work against a backdrop of various supervisory approaches, we provide a comprehensive view of where MMCPF stands in the context of current COD methodologies and highlight its potential advantages. In addition to comparisons with current state-of-the-art COD methods, we also benchmark against two VCOD methods, SLTNet (Cheng et al., 2022) and MG (Yang et al., 2021a), which can demonstrate the generalization capability of MMCPF. Finally, we further compare MMCPF with Open-Vocabulary COD method OVCoser (Pang et al., 2023).
| OVCamo (3770 Images) | |||
|---|---|---|---|
| Methods | MAE | ||
| ERRNet (PR2022) | 0.537 | 0.770 | 0.045 |
| PFSNet (CVPR2023) | 0.114 | 0.496 | 0.075 |
| OVCoser (ECCV2024) | 0.646 | 0.809 | 0.036 |
| Ours (Shikra+SAMHQ) | 0.550 | 0.707 | 0.088 |
| CAMO (250 Images) | COD10K (2026 Images) | NC4K (4121 Images) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Methods | MAE | MAE | MAE | ||||||
| 1. Baseline | 0.410 | 0.519 | 0.199 | 0.366 | 0.507 | 0.188 | 0.402 | 0.520 | 0.185 |
| 2. Baseline+PA | 0.554 | 0.629 | 0.157 | 0.482 | 0.615 | 0.127 | 0.565 | 0.651 | 0.143 |
| 3. Baseline+PA+DA | 0.573 | 0.649 | 0.149 | 0.501 | 0.640 | 0.120 | 0.580 | 0.681 | 0.126 |
| 4. Baseline+PA+DA+Polysemy | 0.603 | 0.671 | 0.134 | 0.521 | 0.663 | 0.107 | 0.605 | 0.701 | 0.121 |
| 5. Baseline+PA+DA+Polysemy+Diverse | 0.635 | 0.707 | 0.118 | 0.558 | 0.701 | 0.081 | 0.639 | 0.737 | 0.105 |
| 6. Baseline+PA+DA+Polysemy+Diverse+VC | 0.680 | 0.749 | 0.100 | 0.592 | 0.733 | 0.065 | 0.681 | 0.768 | 0.082 |

4.3. Quantitative and Qualitative Evaluation
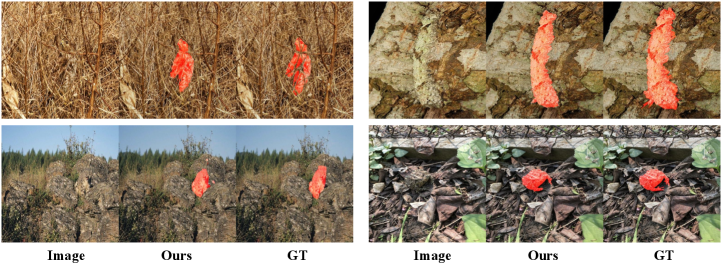
COD Evaluation. From Table. 2, it is evident that the performance of our MMCPF significantly surpasses the zero-shot method ZSCOD (Li et al., 2023a). This observation preliminarily reflects the generalization capabilities of MLLM in camouflaged scenes. Compared to another zero-shot method GenSAM (Hu et al., 2024), based on MLLM/VFM, our method’s performance can still surpass this method. A major reason for this is the unique nature of camouflaged objects. Although the GenSAM also designes some text prompts to guide the MLLM to detect camouflaged objects, the effectiveness of these prompts is not as comprehensive as the approach summarized in our paper, which prompts the MLLM from three distinct dimensions to identify camouflaged objects. Furthermore, MMCPF outperforms the weakly-supervised method WSCOD (He et al., 2023) in terms of and , an undoubtedly exciting performance indication. This suggests that with the design of appropriate enhancement mechanisms, MLLM can effectively perceive camouflaged objects. Finally, on the CAMO and COD10K datasets, the metric even surpasses some fully-supervised methods. This demonstrates the superiority of MMCPF in the localization capability of camouflaged objects. However, when compared with the current state-of-the-art fully-supervised method like FSPNet (Huang et al., 2023a), there is still a noticeable performance gap. Also, the shortcomings in the MAE metric indicate that there is room for improvement in the absolute accuracy of pixel-level predictions by MLLM/VFM, perhaps due to the lack of specific optimizations for downstream segmentation tasks in these foundational models. The visualization results in the Fig. 6 also show that MMCPF can better locate the camouflaged objects in different camouflage scenarios.
Other Scene Evaluation. As shown in Table. 3, MMCPF not only completely surpasses the weakly-supervised method and unsupervised video COD methods, but it also achieves competitive results compared to some fully-supervised methods in video camouflaged scenarios. This performance on the video data further underscores the versatility and adaptability of our approach. We can further find that GenSAM has limited generalizability on the new camouflaged scene. The primary reason causing this is that GenSAM modifies the structure of the original foundational model, which is like Adapter operation and might undermine the generalizability of the foundational model itself.
Finally, we also validate the effectiveness of our MMCPF in the newly proposed Open-Vocabulary COD scenario, OVCamo. As can be seen from Table. 4, our method surpasses some recent fully supervised methods, which fully demonstrates the effectiveness of our approach. Through this series of experiments, the strong generalization ability of our proposed MMCPF has been fully validated.
4.4. Ablation Studies
In Table. 5, Baseline represents our use of the vanilla text prompt, “Please find a camouflaged object in this image and provide me with its exact location coordinates”, to query MLLM, without incorporating visual completion. The results in the first row indicate that using vanilla text prompt alone is insufficient to enable MLLM to perceive camouflaged scenes effectively. Subsequently, we enhance the text descriptions by including attributes of the camouflaged objects, and the text prompt is “This image may contain a camouflaged object whose shape, color, texture, pattern and movement closely resemble its surroundings, enabling it to blend in. Can you identify it and provide its precise location coordinates?”. The results from the second and third rows demonstrate a further improvement. After that, considering the issue of polysemy in descriptions, we modify the text prompts as “This image may contain a concealed object whose shape, color, texture, pattern and movement closely resemble its surroundings, enabling it to blend in. Can you identify it and provide its precise location coordinates?”. Using these two types of prompts in tandem to cue the MLLM, we observe an additional enhancement in performance. Finally, we generate synonymous prompts based on the first two text types to further cue the MLLM, thereby improving performance. The diverse text prompt is “This image may contain a camouflaged object whose shape, color, pattern, movement and texture bear little difference compared to its surroundings, enabling it to blend in. Please provide its precise location coordinates.”.
In MMCPF, we also implement visual completion to further enhance the MLLM’s ability to perceive camouflaged objects. The results in the sixth row demonstrate that incorporating visual completion can lead to further performance improvements. Fig. 7 visually illustrates the effectiveness of visual completion, showcasing how this component of our approach significantly aids in the accurate detection and delineation of camouflaged objects.
5. Conclusion
This study successfully demonstrates that the MLLM can be effectively adapted to the challenging realm of zero-shot COD through our novel MMCPF. Despite the misinterpretation issues and localization uncertainties associated with MLLM in processing camouflaged scenes, our proposed CoVP significantly mitigates these challenges. By enhancing MLLM’s perception from both linguistic and visual perspectives, CoVP not only reduces misinterpretation but also improves the precision in locating camouflaged objects. The validation of MMCPF across four major COD datasets confirms its efficacy, indicating that MLLM’s generalizability extends to complex and visually demanding scenarios. This research not only marks a pioneering step in MLLM application but also provides a valuable blueprint for future endeavors aiming to enhance the perceptual capabilities of MLLMs in specialized tasks, paving the way for broader and more effective applications in the vision-language processing.
References
- (1)
- Bi et al. (2022) Hongbo Bi, Cong Zhang, Kang Wang, Jinghui Tong, and Feng Zheng. 2022. Rethinking Camouflaged Object Detection: Models and Datasets. IEEE TCSVT 32, 9 (2022), 5708–5724.
- Brown et al. (2020) Tom B. Brown, Benjamin Mann, Nick Ryder, Melanie Subbiah, Jared Kaplan, Prafulla Dhariwal, Arvind Neelakantan, Pranav Shyam, Girish Sastry, Amanda Askell, Sandhini Agarwal, Ariel Herbert-Voss, Gretchen Krueger, Tom Henighan, Rewon Child, Aditya Ramesh, Daniel M. Ziegler, Jeffrey Wu, Clemens Winter, Christopher Hesse, Mark Chen, Eric Sigler, Mateusz Litwin, Scott Gray, Benjamin Chess, Jack Clark, Christopher Berner, Sam McCandlish, Alec Radford, Ilya Sutskever, and Dario Amodei. 2020. Language Models are Few-Shot Learners. In NeurIPS.
- Cao et al. (2023) Yunkang Cao, Xiaohao Xu, Chen Sun, Xiaonan Huang, and Weiming Shen. 2023. Towards Generic Anomaly Detection and Understanding: Large-scale Visual-linguistic Model (GPT-4V) Takes the Lead. CoRR abs/2311.02782 (2023).
- Chen et al. (2023) Keqin Chen, Zhao Zhang, Weili Zeng, Richong Zhang, Feng Zhu, and Rui Zhao. 2023. Shikra: Unleashing Multimodal LLM’s Referential Dialogue Magic. CoRR abs/2306.15195 (2023).
- Cheng et al. (2022) Xuelian Cheng, Huan Xiong, Deng-Ping Fan, Yiran Zhong, Mehrtash Harandi, Tom Drummond, and Zongyuan Ge. 2022. Implicit Motion Handling for Video Camouflaged Object Detection. In CVPR. IEEE, 13854–13863.
- Dai et al. (2023) Wenliang Dai, Junnan Li, Dongxu Li, Anthony Meng Huat Tiong, Junqi Zhao, Weisheng Wang, Boyang Li, Pascale Fung, and Steven C. H. Hoi. 2023. InstructBLIP: Towards General-purpose Vision-Language Models with Instruction Tuning. CoRR abs/2305.06500 (2023).
- Devlin et al. (2019) Jacob Devlin, Ming-Wei Chang, Kenton Lee, and Kristina Toutanova. 2019. BERT: Pre-training of Deep Bidirectional Transformers for Language Understanding. In NAACL-HLT (1). Association for Computational Linguistics, 4171–4186.
- Dong et al. (2022) Qingxiu Dong, Lei Li, Damai Dai, Ce Zheng, Zhiyong Wu, Baobao Chang, Xu Sun, Jingjing Xu, and Zhifang Sui. 2022. A survey for in-context learning. CoRR abs/2301.00234 (2022).
- Fan et al. (2017) Deng-Ping Fan, Ming-Ming Cheng, Yun Liu, Tao Li, and Ali Borji. 2017. Structure-Measure: A New Way to Evaluate Foreground Maps. In IEEE International Conference on Computer Vision, ICCV 2017, Venice, Italy, October 22-29, 2017. IEEE Computer Society, 4558–4567.
- Fan et al. (2022) Deng-Ping Fan, Ge-Peng Ji, Ming-Ming Cheng, and Ling Shao. 2022. Concealed Object Detection. IEEE TPAMI 44, 10 (2022), 6024–6042.
- Fan et al. (2020) Deng-Ping Fan, Ge-Peng Ji, Guolei Sun, Ming-Ming Cheng, Jianbing Shen, and Ling Shao. 2020. Camouflaged Object Detection. In CVPR. IEEE, 2774–2784.
- Fu et al. (2023) Yao Fu, Hao Peng, Ashish Sabharwal, Peter Clark, and Tushar Khot. 2023. Complexity-Based Prompting for Multi-step Reasoning. In ICLR. OpenReview.net.
- He et al. (2023) Ruozhen He, Qihua Dong, Jiaying Lin, and Rynson W. H. Lau. 2023. Weakly-Supervised Camouflaged Object Detection with Scribble Annotations. In AAAI. AAAI Press, 781–789.
- Hu et al. (2024) Jian Hu, Jiayi Lin, Shaogang Gong, and Weitong Cai. 2024. Relax Image-Specific Prompt Requirement in SAM: A Single Generic Prompt for Segmenting Camouflaged Objects. In AAAI. AAAI Press, 12511–12518.
- Hu et al. (2023) Xiaobin Hu, Shuo Wang, Xuebin Qin, Hang Dai, Wenqi Ren, Donghao Luo, Ying Tai, and Ling Shao. 2023. High-Resolution Iterative Feedback Network for Camouflaged Object Detection. In AAAI. AAAI Press, 881–889.
- Huang et al. (2023b) Shaohan Huang, Li Dong, Wenhui Wang, Yaru Hao, Saksham Singhal, Shuming Ma, Tengchao Lv, Lei Cui, Owais Khan Mohammed, Barun Patra, Qiang Liu, Kriti Aggarwal, Zewen Chi, Johan Bjorck, Vishrav Chaudhary, Subhojit Som, Xia Song, and Furu Wei. 2023b. Language Is Not All You Need: Aligning Perception with Language Models. CoRR abs/2302.14045 (2023).
- Huang et al. (2023a) Zhou Huang, Hang Dai, Tian-Zhu Xiang, Shuo Wang, Huai-Xin Chen, Jie Qin, and Huan Xiong. 2023a. Feature Shrinkage Pyramid for Camouflaged Object Detection with Transformers. In CVPR. IEEE, 5557–5566.
- Ji et al. (2022) Ge-Peng Ji, Lei Zhu, Mingchen Zhuge, and Keren Fu. 2022. Fast Camouflaged Object Detection via Edge-based Reversible Re-calibration Network. PR 123 (2022), 108414.
- Ji et al. (2023) Ge-Peng Ji, Deng-Ping Fan, Yu-Cheng Chou, Dengxin Dai, Alexander Liniger, and Luc Van Gool. 2023. Deep gradient learning for efficient camouflaged object detection. MIR 20, 1 (2023), 92–108.
- Ke et al. (2023) Lei Ke, Mingqiao Ye, Martin Danelljan, Yifan Liu, Yu-Wing Tai, Chi-Keung Tang, and Fisher Yu. 2023. Segment Anything in High Quality. CoRR abs/2306.01567 (2023).
- Kirillov et al. (2023a) Alexander Kirillov, Eric Mintun, Nikhila Ravi, Hanzi Mao, Chloé Rolland, Laura Gustafson, Tete Xiao, Spencer Whitehead, Alexander C. Berg, Wan-Yen Lo, Piotr Dollár, and Ross B. Girshick. 2023a. Segment Anything. CoRR abs/2304.02643 (2023).
- Kirillov et al. (2023b) Alexander Kirillov, Eric Mintun, Nikhila Ravi, Hanzi Mao, Chloe Rolland, Laura Gustafson, Tete Xiao, Spencer Whitehead, Alexander C Berg, Wan-Yen Lo, et al. 2023b. Segment Anything. arXiv preprint arXiv:2304.02643 (2023).
- Kojima et al. (2022) Takeshi Kojima, Shixiang Shane Gu, Machel Reid, Yutaka Matsuo, and Yusuke Iwasawa. 2022. Large Language Models are Zero-Shot Reasoners. In NeurIPS.
- Lai et al. (2023) Xin Lai, Zhuotao Tian, Yukang Chen, Yanwei Li, Yuhui Yuan, Shu Liu, and Jiaya Jia. 2023. LISA: Reasoning Segmentation via Large Language Model. CoRR abs/2308.00692 (2023).
- Le et al. (2019) Trung-Nghia Le, Tam V. Nguyen, Zhongliang Nie, Minh-Triet Tran, and Akihiro Sugimoto. 2019. Anabranch network for camouflaged object segmentation. CVIU 184 (2019), 45–56.
- Li et al. (2019) Bo Li, Zhengxing Sun, Quan Wang, and Qian Li. 2019. Co-saliency Detection Based on Hierarchical Consistency. In ACM Multimedia. ACM, 1392–1400.
- Li et al. (2023d) Bo Li, Yuanhan Zhang, Liangyu Chen, Jinghao Wang, Jingkang Yang, and Ziwei Liu. 2023d. Otter: A Multi-Modal Model with In-Context Instruction Tuning. CoRR abs/2305.03726 (2023).
- Li et al. (2023a) Haoran Li, Chun-Mei Feng, Yong Xu, Tao Zhou, Lina Yao, and Xiaojun Chang. 2023a. Zero-Shot Camouflaged Object Detection. IEEE TIP. 32 (2023), 5126–5137.
- Li et al. (2023b) Junnan Li, Dongxu Li, Silvio Savarese, and Steven C. H. Hoi. 2023b. BLIP-2: Bootstrapping Language-Image Pre-training with Frozen Image Encoders and Large Language Models. In ICML, Vol. 202. PMLR, 19730–19742.
- Li et al. (2022) Junnan Li, Dongxu Li, Caiming Xiong, and Steven C. H. Hoi. 2022. BLIP: Bootstrapping Language-Image Pre-training for Unified Vision-Language Understanding and Generation. In ICML, Vol. 162. PMLR, 12888–12900.
- Li et al. (2023c) Yi Li, Hualiang Wang, Yiqun Duan, and Xiaomeng Li. 2023c. CLIP Surgery for Better Explainability with Enhancement in Open-Vocabulary Tasks. CoRR abs/2304.05653 (2023).
- Liu et al. (2023a) Haotian Liu, Chunyuan Li, Qingyang Wu, and Yong Jae Lee. 2023a. Visual Instruction Tuning. CoRR abs/2304.08485 (2023).
- Liu et al. (2023b) Yang Liu, Muzhi Zhu, Hengtao Li, Hao Chen, Xinlong Wang, and Chunhua Shen. 2023b. Matcher: Segment Anything with One Shot Using All-Purpose Feature Matching. CoRR abs/2305.13310 (2023).
- Lu et al. (2019) Jiasen Lu, Dhruv Batra, Devi Parikh, and Stefan Lee. 2019. ViLBERT: Pretraining Task-Agnostic Visiolinguistic Representations for Vision-and-Language Tasks. In NeurIPS. 13–23.
- Lv et al. (2021) Yunqiu Lv, Jing Zhang, Yuchao Dai, Aixuan Li, Bowen Liu, Nick Barnes, and Deng-Ping Fan. 2021. Simultaneously Localize, Segment and Rank the Camouflaged Objects. In CVPR. IEEE, 11591–11601.
- Ma and Wang (2023) Jun Ma and Bo Wang. 2023. Segment Anything in Medical Images. CoRR abs/2304.12306 (2023). https://doi.org/10.48550/ARXIV.2304.12306 arXiv:2304.12306
- Mondal (2020) Ajoy Mondal. 2020. Camouflaged Object Detection and Tracking: A Survey. IJIG. 20, 4 (2020), 2050028:1–2050028:13.
- OpenAI (2023) OpenAI. 2023. GPT-4V(ision) System Card. In https://openai.com.
- Oquab et al. (2023) Maxime Oquab, Timothée Darcet, Théo Moutakanni, Huy Vo, Marc Szafraniec, Vasil Khalidov, Pierre Fernandez, Daniel Haziza, Francisco Massa, Alaaeldin El-Nouby, Mahmoud Assran, Nicolas Ballas, Wojciech Galuba, Russell Howes, Po-Yao Huang, Shang-Wen Li, Ishan Misra, Michael G. Rabbat, Vasu Sharma, Gabriel Synnaeve, Hu Xu, Hervé Jégou, Julien Mairal, Patrick Labatut, Armand Joulin, and Piotr Bojanowski. 2023. DINOv2: Learning Robust Visual Features without Supervision. CoRR abs/2304.07193 (2023).
- Pang et al. (2022) Youwei Pang, Xiaoqi Zhao, Tian-Zhu Xiang, Lihe Zhang, and Huchuan Lu. 2022. Zoom In and Out: A Mixed-scale Triplet Network for Camouflaged Object Detection. In CVPR. IEEE, 2150–2160.
- Pang et al. (2023) Youwei Pang, Xiaoqi Zhao, Jiaming Zuo, Lihe Zhang, and Huchuan Lu. 2023. Open-Vocabulary Camouflaged Object Segmentation. CoRR abs/2311.11241 (2023).
- Peng et al. (2023) Zhiliang Peng, Wenhui Wang, Li Dong, Yaru Hao, Shaohan Huang, Shuming Ma, and Furu Wei. 2023. Kosmos-2: Grounding Multimodal Large Language Models to the World. CoRR abs/2306.14824 (2023).
- Pi et al. (2023) Renjie Pi, Jiahui Gao, Shizhe Diao, Rui Pan, Hanze Dong, Jipeng Zhang, Lewei Yao, Jianhua Han, Hang Xu, Lingpeng Kong, and Tong Zhang. 2023. DetGPT: Detect What You Need via Reasoning. CoRR abs/2305.14167 (2023).
- Pu et al. (2024) Xinyang Pu, Hecheng Jia, Linghao Zheng, Feng Wang, and Feng Xu. 2024. ClassWise-SAM-Adapter: Parameter Efficient Fine-tuning Adapts Segment Anything to SAR Domain for Semantic Segmentation. CoRR abs/2401.02326 (2024).
- Radford et al. (2021) Alec Radford, Jong Wook Kim, Chris Hallacy, Aditya Ramesh, Gabriel Goh, Sandhini Agarwal, Girish Sastry, Amanda Askell, Pamela Mishkin, Jack Clark, Gretchen Krueger, and Ilya Sutskever. 2021. Learning Transferable Visual Models From Natural Language Supervision. In ICML, Vol. 139. PMLR, 8748–8763.
- Truong et al. (2021) Prune Truong, Martin Danelljan, Fisher Yu, and Luc Van Gool. 2021. Warp Consistency for Unsupervised Learning of Dense Correspondences. In ICCV. IEEE.
- Wei et al. (2022) Jason Wei, Xuezhi Wang, Dale Schuurmans, Maarten Bosma, Brian Ichter, Fei Xia, Ed H. Chi, Quoc V. Le, and Denny Zhou. 2022. Chain-of-Thought Prompting Elicits Reasoning in Large Language Models. In NeurIPS.
- Yang et al. (2021a) Charig Yang, Hala Lamdouar, Erika Lu, Andrew Zisserman, and Weidi Xie. 2021a. Self-supervised Video Object Segmentation by Motion Grouping. In ICCV. IEEE, 7157–7168.
- Yang et al. (2021b) Fan Yang, Qiang Zhai, Xin Li, Rui Huang, Ao Luo, Hong Cheng, and Deng-Ping Fan. 2021b. Uncertainty-Guided Transformer Reasoning for Camouflaged Object Detection. In ICCV. IEEE, 4126–4135.
- Zhai et al. (2021) Qiang Zhai, Xin Li, Fan Yang, Chenglizhao Chen, Hong Cheng, and Deng-Ping Fan. 2021. Mutual Graph Learning for Camouflaged Object Detection. In CVPR. IEEE, 12997–13007.
- Zhang et al. (2022b) Cong Zhang, Kang Wang, Hongbo Bi, Ziqi Liu, and Lina Yang. 2022b. Camouflaged object detection via Neighbor Connection and Hierarchical Information Transfer. CVIU. 221 (2022), 103450.
- Zhang and Liu (2023) Kaidong Zhang and Dong Liu. 2023. Customized Segment Anything Model for Medical Image Segmentation. CoRR abs/2304.13785 (2023).
- Zhang et al. (2022a) Qiao Zhang, Yanliang Ge, Cong Zhang, and Hongbo Bi. 2022a. TPRNet: camouflaged object detection via transformer-induced progressive refinement network. The Visual Computer (2022), 1–15.
- Zhang et al. (2023a) Renrui Zhang, Jiaming Han, Aojun Zhou, Xiangfei Hu, Shilin Yan, Pan Lu, Hongsheng Li, Peng Gao, and Yu Qiao. 2023a. LLaMA-Adapter: Efficient Fine-tuning of Language Models with Zero-init Attention. CoRR abs/2303.16199 (2023).
- Zhang et al. (2023b) Renrui Zhang, Zhengkai Jiang, Ziyu Guo, Shilin Yan, Junting Pan, Hao Dong, Peng Gao, and Hongsheng Li. 2023b. Personalize Segment Anything Model with One Shot. CoRR abs/2305.03048 (2023).
- Zhang et al. (2023c) Shilong Zhang, Peize Sun, Shoufa Chen, Min Xiao, Wenqi Shao, Wenwei Zhang, Kai Chen, and Ping Luo. 2023c. GPT4RoI: Instruction Tuning Large Language Model on Region-of-Interest. CoRR abs/2307.03601 (2023).
- Zhao et al. (2023) Liang Zhao, En Yu, Zheng Ge, Jinrong Yang, Haoran Wei, Hongyu Zhou, Jianjian Sun, Yuang Peng, Runpei Dong, Chunrui Han, and Xiangyu Zhang. 2023. ChatSpot: Bootstrapping Multimodal LLMs via Precise Referring Instruction Tuning. CoRR abs/2307.09474 (2023).
- Zhong et al. (2022) Yijie Zhong, Bo Li, Lv Tang, Senyun Kuang, Shuang Wu, and Shouhong Ding. 2022. Detecting Camouflaged Object in Frequency Domain. In CVPR. IEEE, 4494–4503.
- Zhu et al. (2023) Deyao Zhu, Jun Chen, Xiaoqian Shen, Xiang Li, and Mohamed Elhoseiny. 2023. MiniGPT-4: Enhancing Vision-Language Understanding with Advanced Large Language Models. CoRR abs/2304.10592 (2023).
- Zhuge et al. (2023) Mingchen Zhuge, Deng-Ping Fan, Nian Liu, Dingwen Zhang, Dong Xu, and Ling Shao. 2023. Salient Object Detection via Integrity Learning. IEEE TPAMI. 45, 3 (2023), 3738–3752.