Boundary controllability of the Korteweg-de Vries equation: The Neumann case
Abstract
This article gives a necessary first step to understanding the critical set phenomenon for the Korteweg-de Vries (KdV) equation posed on interval considering the Neumann boundary conditions with only one control input. We showed that the KdV equation is controllable in the critical case, i.e., when the spatial domain belongs to the set , where and
the KdV equation is exactly controllable in . The result is achieved using the return method together with a fixed point argument.
keywords:
Korteweg–de Vries equation, exact boundary controllability, Neumann boundary conditions, Dirichlet boundary conditions, critical setPrimary, 35Q53, 93B05; Secondary, 37K10
1 Introduction
We had known when we formulated the waves as a free boundary problem of the incompressible, irrotational Euler equation in an appropriate non-dimensional form, there exist two non-dimensional parameters and , where the water depth, the wavelength and the amplitude of the free surface are parameterized as and , respectively. See, for instance, [2, 3, 1, 4, 23, 26] and references therein for a rigorous justification. Moreover, another non-dimensional parameter appears, the Bond number, to measure the importance of gravitational forces compared to surface tension forces also appears. Considering the physical condition we can characterize the waves, called long waves or shallow water waves. In particular, considering the relations between and , we can have the following regime:
-
•
Korteweg-de Vries (KdV): and . Under this regime, Korteweg and de Vries [20]111This equation was first introduced by Boussinesq [6], and Korteweg and de Vries rediscovered it twenty years later. derived the following well-known equation as a central equation among other dispersive or shallow water wave models called the KdV equation from the equations for capillary-gravity waves:
Today, it is well known that this equation has an important phenomenon that directly affects the control problem related to them, the so-called critical length phenomenon. Let us briefly present the control problem, which makes the phenomenon of critical lengths emerge. The control problem was presented in a pioneering work of Rosier [24] that studied the following system
| (1.1) |
where the boundary value function is considered as a control input. Precisely, the author showed the following control problem for the system (1.1), giving the origin of the critical length phenomenon for the KdV equation.
Question : Given and , can one find an appropriate control input such that the corresponding solution of the system (1.1) satisfies
| (1.2) |
Rosier answered the previous question in [24]. He proved that considering , where
the associated linear system (1.1)
| (1.3) |
is controllable; roughly speaking, if system (1.3) is not controllable, that is, there exists a finite-dimensional subspace of , denoted by , which is unreachable from for the linear system. More precisely, for every nonzero state , and satisfying (1.3) and , one has .
Definition 1.1.
A spatial domain is called critical for the system (1.3) if its domain length belongs to .
Following the work of Rosier [24], the boundary control system of the KdV equation posed on the finite interval with various control inputs has been intensively studied (cf. [7, 8, 10, 11, 15, 17, 18, 19] and see [9, 25] for more complete reviews). Thus, this work gives a necessary step to understanding this phenomenon for the KdV equation with Neumann boundary conditions, completing, in some sense, the results shown in [7].
1.1 Problem set
In this article, we study a class of distributed parameter control systems described by the Korteweg–de Vries (KdV) equation posed on a bounded domain with the Neumann boundary conditions
| (1.4) |
where will be considered as a control input. Recently, the first author dealt with the control problem related to the system (1.4). Precisely, was proved that their solutions are exactly controllable in a neighborhood of if the length of the spatial domain does not belong to the set
that is, the relation (1.2) holds for the solution of the system (1.4). The result can be read as follows.
Theorem 1.2 (Caicedo, Capistrano–Filho, Zhang [7]).
As in [24], the first step is to obtain a control result for the linear system, namely,
| (1.5) |
Precisely the authors in [7] proved the following result.
Theorem 1.3 (Caicedo, Capistrano–Filho, Zhang [7]).
With this in hand, they extend the result for the nonlinear system (1.4) using fixed point argument achieving Theorem 1.2 whenever . It is important to point out that fixing and considering we have , when , and, from Theorem 1.3, it follows that (1.5) are not exactly controllable. Additionally, as before mentioned, we do not know if the system (1.4) is exactly controllable. So, in this context, the natural questions appear:
Question : Given , and close enough to , can one find an appropriate control input such that the solution of the system (1.9), corresponding to and , satisfies ?
Question : Given , and . The system (1.9) is exactly controllable in the critical length , that is when ?
1.2 Main results
Let us consider the following nonlinear control system
| (1.9) |
where will be as a control input and is the state. Theorem 1.2 says that when , system (1.9) is locally controllable around but we do not know if the same holds when . The main result in this work provides an affirmative answer to the Question . Precisely, we have the following:
Theorem 1.4.
This previous result can be generalized for any as follows:
Theorem 1.5.
To prove the previous results we need an auxiliary property that ensures that for near enough to (small perturbations of ), the system (1.4) is exactly controllable in a neighborhood of in , or precisely, for close enough to one has so that, the system (1.5) corresponding to is exactly controllable, answering the Question . In other words, the set of critical lengths is sensitive to small disturbances in equilibrium , and the result can be read as follows.
Theorem 1.6.
Let , and . There exists such that, for every , , we have . Consequently, the linear system (1.5), with , is exactly controllable; and the nonlinear system (1.9) is exactly controllable around the steady state in , that is, there exists such that, for any with
one can find such that the system (1.9) admits a unique solution satisfying and .
1.3 Heuristic and paper’s outline
The proof of the Theorem 1.6 is based on the topological properties of real numbers together with the Theorem 1.2. Moreover, with this in hand, both results stated in the previous paragraph (Theorems 1.4 and 1.5) rely on the so-called return method together with the fixed point argument.
It is important to point out that the return method was introduced by J.M. Coron in [12] (see also [13]) and has been used by several authors to prove control results in the critical lengths for the KdV-type equation (see, for instance, [8, 10, 11, 15]). This method consists of building particular trajectories of the system (1.9) starting and ending at some equilibrium such that the linearization of the system around these trajectories has good properties. Here, we use a combination of this method with a fixed point argument, successfully applied in [16]. We mention that this method can be applied together with quasi-static deformations and power series expansion, we infer to the reader the nice book of Coron [14] about more details of the method.
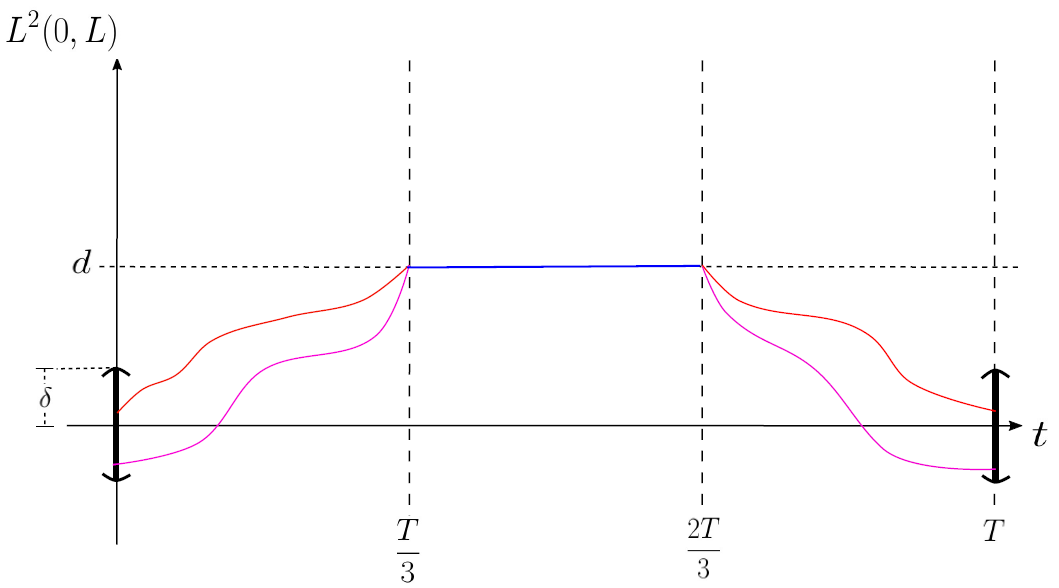
Concerning the construction of solutions to the Theorems 1.4 and 1.5 we follow the following procedure: In the first time, we construct a solution that starts from and reaches at time a state which is in some sense close to (which is yet to be defined). Then we construct a solution (close to the state solution ), which starts at time from the previous state. In the last step, we bring the latter state to 0 via a function , as we can see in Figure 1 below. For details of this construction see the characterization of the function in (3.52).
We finish this introduction with an outline of this work which consists of four parts, including the introduction. Section 2 gives an overview of the well-posedness of the system (1.9). Section 3 is devoted to proving carefully the controllability of the system (1.9) when . Precisely, in the first part of Section 3, we deal with the proof of Theorem 1.6. In the second part, we prove the construction of the function mentioned before, and finally, in the third part of Section 3, we use these previous results to achieve Theorem 1.4.
2 Overview of the well-posedness theory
In this section, we review the well-posedness theory for the KdV equation. The results presented here can be found in [5, 7, 21]. For that, consider and with . We define the space
which is a Banach space with the following norm
For any we denote simply by .
Additionally, let be given and consider the space
with a norm
The next proposition, showed in [7, Proposition 2.5], provides the well-posedness to the following system
| (2.13) |
Proposition 2.1 (Caicedo, Capistrano-Filho, Zhang [7]).
For any , and , the IBVP (2.13) admits a unique mild solution , which satisfies
Moreover, there exists such that
Remark 2.2.
We highlight that the constant in the above result depends on . However, if then, the estimates in the Proposition 2.1 hold with the same constant corresponding to .
Using the Proposition 2.1 we can get properties for the linear problem
| (2.17) |
where is given. To do this, the following lemma will be very useful and was proved in [22, Lemma 3].
Lemma 2.3 (Kramer, Zhang [22]).
There exists a constant such that
for every .
With these previous results in hand, the following proposition gives us the well-posedness to the general system (2.17), which will be used several times so, for the sake of completeness, we will give the proof.
Proposition 2.4.
For any , and , the IBVP (2.17) admits a unique mild solution , which satisfies
and
for some positive constant which depends only on and . In addition, the solution possesses the following sharp trace estimates
In particular, the map is Lipschitz continuous.
Proof 2.5.
Let , and be given. Consider satisfying and define the map in the next way: for , put being the solution of
Consider the set
with to be determined later. From Proposition 2.1 and Lemma 2.3 we have for any the following estimate
| (2.18) | ||||
Choosing
and satisfying
| (2.19) |
the inequality (2.18) give us
that is, . Furthermore, solves
So, from Proposition 2.1, Lemma 2.3 and inequality (2.19), we have
Thus, is a contraction so that, by Banach’s fixed point theorem, has a fixed point which is a solution to the problem (2.17) in , corresponding to data . Additionally, inequalities (2.18) and (2.19) yields that
and, therefore,
Since depends only on , with a standard continuation extension argument, the solution can be extended to interval and the following estimate holds
| (2.20) |
for some suitable constant which only depends on and . Therefore, it follows from (2.20) that the map is Lipschitz continuous and, as a consequence of this, we have the uniqueness of the solution in . The sharp trace estimates follow as a consequence of the Proposition 2.1, showing the proposition.
Now, we will study the well-posedness of the nonlinear problem, namely:
| (2.24) |
The result can be read as follows.
Proposition 2.6.
Let be given. For every , and there exists a unique mild solution of (2.24) which satisfies
and
for some constant . Furthermore, the corresponding solution map is locally Lipschitz continuous, that is, given there exist such that, for every
with
we have
Proof 2.7.
We will proceed as follows: First, we will show the existence of a solution and obtain the desired estimates. Secondly, we will get an estimate that provides the uniqueness of the solution and guarantees that is locally Lipschitz continuous.
To do that, consider , and . Let satisfying and define the map in the following way: For , pick as solution of the following problem
Consider the set
with to be determined later. Using Proposition 2.4 and Lemma 2.3 we obtain, for any ,
| (2.25) | ||||
Choosing
and satisfying
| (2.26) |
inequality (2.25) give us
that is, . Moreover given , solves
Therefore, from Proposition 2.4,
Note that
Then, thanks to the Lemma 2.3, we get that
and, using (2.26) yields
Hence, is a contraction so that, by Banach’s fixed point theorem, has a fixed point which is a solution to the problem (2.24) in , corresponding to data .
Furthermore, due to the inequalities (2.25) and (2.26), we have
and, therefore
Since depends only on , with a standard continuation extension argument, the solution can be extended to interval and the following estimate holds
| (2.27) |
for some suitable constant which only depends on and . Now, using one more time the Proposition 2.6 together with Lemma 2.3 we obtain
By (2.27) it follows that
Choosing
we obtain the desired estimates.
Now, consider
with
Write and . Let and be solutions of
and
respectively. Then, solves the problem
From Proposition 2.4 it follows that
| (2.28) |
where is a constant which depends on and . But, using (2.27) we have
and, consequently,
Hence, the constant can be chosen depending only on and (and also on ), so that, (2.28) gives us the uniqueness of the solution which turns the solution map well-defined. Moreover, from (2.28)
which concludes the proof.
Finally, the following Lemma, whose proof can be found in [24], will be useful in the next section.
Lemma 2.8 (Rosier [24]).
If then and the map
is continuous. More precisely, for every we have that
where is a positive constant that depends only on .
Remark 2.9.
We end this subsection with the following remarks.
- 1.
-
2.
Of course, the constant in the Proposition 2.4 depends on . However, given , the same constant can be used for every with .
3 Boundary controllability in the critical lenght
In this section, we study the controllability of the system
| (3.32) |
when is a critical length. We will use the return method together with the fixed point argument to ensure the controllability of the system (3.32) when . Before presenting the proof of the main result, let us give a preliminary result which is important in our analysis.
3.1 An auxiliary result
Given , the set of critical lengths for the linearization of (3.32) around is
As mentioned before, when , the linear system
| (3.36) |
is not exactly controllable. So, in this section, we first give the proof of Theorem 1.6.
Proof 3.1.
(Proof of Theorem 1.6.) We will split the proof into two cases.
First case: for some .
Let and suppose that . Then
| (3.37) |
or
| (3.38) |
Otherwise, if (3.38) holds, so
giving that
where . Therefore, if then we necessarily have . Here,
and
We are now in a position to prove that is discrete. To do that, consider such that in the form
and
with . Note that
Since we have
Thus
so that
Analogously, we get
Now, let and with , as follow:
and
where . Observe that
Since we have that and are distinct natural numbers so
and, consequently, we have
From all the above we conclude that
which implies that is discrete.
Note that since
As any point in is isolated, there exists such that
Therefore for we have that and, therefore, .
Second case: for some .
Let and suppose that , that is, (3.37) or (3.38) holds. If (3.37) holds, then
giving that
with . If (3.38) is the case, thus
so that
Therefore, if then we have necessarily where
and
As done before, taking with , such that
and
where ,yields that
and, as we have
Consequently,
In an analogous way,
and
Therefore,
3.2 Construction of the trajectories
In this subsection, for simplicity, we will consider in . Let and note that by Theorem 1.6 there exist such that for every , the system (3.36) is exactly controllable around . Henceforth, we use and to denote the positive constants given in Proposition 2.6, corresponding to . One can see that, for every , the same constants can be used to apply the corresponding results for so, for simplicity, we will consider now on .
The first result of this section ensures that we can construct solutions for the system (3.32) which starts close to (left-hand side of the spatial domain) and achieves some non-null equilibrium in a certain time . The result is shown by a fixed-point argument.
Proposition 3.2.
There exist such that, for every and with there exists such that, the solution of (3.32) for , satisfies
Proof 3.3.
Let be a number to be chosen later. Consider and satisfying
For such that
| (3.39) |
where is the positive constant given in Lemma 2.3, [7, Proposition 3.6] guarantees the existence of a bounded linear operator
such that, for any , the solution of
with the control satisfies .
We will denote, for simplicity, the operator (given in Proposition 2.4 and Remark 2.9 with ) by . Observe that, if is solution for (3.32) for some control , then is a solution of
that is,
| (3.40) |
Let and given by
Define the map by
Note that if has a fixed point , then, from the above construction, it follows that is a solution of (3.32) with the control . Moreover, from (3.40) we have
so, by definitions of and , we get that
and our problem would be solved. So we will focus our efforts on showing that has a fixed point in a suitable metric space.
To do that, let the set
with to be chosen later. By (3.40) and Proposition 2.4 (together with Remark 2.9) we have, for , that
From Lemma 2.3 and Young inequality we ensure that
Thus,
and, by (3.39) we obtain
that is,
where
In this way
Therefore,
Choosing
and small enough such that
| (3.41) |
yields that
Additionally, observe that for , Proposition 2.4 give us
Since
we have again from Proposition 2.4 that
Putting these two previous inequalities together, we find that
From Lemmas 2.3 and 2.8, together with the choices (3.39) and (3.41), it follows that
Therefore, is a contraction so that, by Banach’s fixed point theorem, has a fixed point , concluding the proof.
The second result of this section ensures the construction of solutions for the system (3.32) on starting in one non-null equilibrium and ending near .
Proposition 3.4.
There exists such that, for every and satisfying there exists such that, the solution of (1.9) for satisfies
Proof 3.5.
Let be a number to be chosen later. Consider and satisfying
Let be such that
| (3.42) |
where is the positive constant given in Lemma 2.3. If is a solution to the problem
| (3.46) |
then is a solution of
that is,
| (3.47) |
Given , let defined by
Now, consider the map given by
Once again, if has a fixed point , from the above construction, it follows that is a solution of (3.46) with the control . Moreover, from (3.47) we have
so, by definitions of and , it follows that
and
Hence our issue would be solved defining by
Now ow, our focus is to show that has a fixed point in a suitable metric space. To do that, consider the set given by
with to be chosen later. By (3.47) and Proposition 2.4 (together with Remark 2.9) we have, for , that
As in the proof of the Proposition 3.2,
Moreover,
Therefore,
Choosing
and small enough such that
| (3.48) |
we get that
Furthermore, observe that for , Proposition 2.4 give us
Since
we have, again from Proposition 2.4, that
Then,
From Lemmas 2.3 and 2.8, together with (3.42) and (3.48), it follows that
Therefore, is a contraction so that, by Banach’s fixed point theorem, has a fixed point which concludes our proof.
3.3 Controllability on
We are in a position to prove Theorems 1.4 and 1.5. For the sake of simplicity, we will give the proof of the case (Theorem 1.4), and the case (Theorem 1.5) follows similarly.
Proof 3.6.
(Proof of Theorem 1.4.) Let and be positive real numbers given in Propositions 3.2 and 3.4, respectively. Define and consider and such that
From Proposition 3.2 there exists such that, the solution of
satisfies
On the other hand, thanks to the Proposition 3.4, there exists such that, the solution of
satisfies
Defining by
| (3.52) |
we have that and is solution of (3.32) driving to at time , showing that the system (3.32) is exactly controllable, and the proof is completed.
Acknowledgment
Capistrano-Filho was supported by CAPES grant number 88881.311964/2018-01, COFECUB/CAPES grant number 8887.879175/2023-00, CNPq grants numbers 307808/2021-1 and 401003/2022-1. Da Silva acknowledges support from CNPq. This work is part of the Ph.D. thesis of da Silva at the Department of Mathematics of the Universidade Federal de Pernambuco.
References
- [1] B. Alvarez-Samaniego and D. Lannes, Large time existence for 3D water-waves and asymptotics, Invent. Math. 171 (2008), no. 3, 485–541.
- [2] J. L. Bona, M. Chen, and J.-C. Saut, Boussinesq equations and other systems for small-amplitude long waves in nonlinear dispersive media. I: Derivation and linear theory, J. Nonlinear. Sci. Vol. 12 (2002), 283–318.
- [3] J. L. Bona, T. Colin, and D. Lannes, Long wave approximations for water waves, Arch. Ration. Mech. Anal. 178 (2005), no. 3, 373–410.
- [4] J. L. Bona, D. Lannes, and J.-C. Saut, Asymptotic models for internal waves, J. Math. Pures Appl. (9) 89 (2008), no. 6, 538–566.
- [5] J. J. Bona, S.M. Sun, and B.-Y. Zhang, A nonhomogeneous boundary-value-problem for the Korteweg-de Vries equation posed on a finite domain, Comm. Partial Differential Equations, 28 (2003), 1391–1438.
- [6] J. M. Boussinesq, Thórie de l’intumescence liquide, applelée onde solitaire ou de, translation, se propageant dans un canal rectangulaire, C. R. Acad. Sci. Paris. 72 (1871) 755–759.
- [7] M. A. Caicedo, R. A. Capistrano–Filho, and B.-Y Zhang, Neumann boundary controllability of the Korteweg–de Vries equation on a bounded domain, SIAM J. Control Optim., 55 (2017), 3503–3532.
- [8] E. Cerpa, Exact controllability of a nonlinear Korteweg-de Vries equation on a critical spatial domain, SIAM J. Control Optim., 46 (2007), 877–899.
- [9] E. Cerpa, Control of a Korteweg-de Vries equation: a tutorial, Math. Control Relat. Fields, 4 (2014), 45–99.
- [10] E. Cerpa and E. Crépeau, Boundary controllability for the nonlinear Korteweg-de Vries equation on any critical domain, Ann. I.H. Poincaré, 26 (2009), 457–475.
- [11] J.-M. Coron and E. Crépeau, Exact boundary controllability of a nonlinear KdV equation with critical lengths. Journal of the European Mathematical Society, no. 6 (2004), 367-398.
- [12] J.-M. Coron, Global asymptotic stabilization for controllable systems without drift, Math. Control. Signals System, 5 (1992), 295–312.
- [13] J.-M. Coron, Contrôlabilité exacte frontiére de l’équation d’Euler des fluids parfaits incompressibles bidimensionnels. C. R. Acad. Sci. Paris, 317 (1993), 271–276.
- [14] J.-M. Coron, Control and Nonlinearity, Math. Surveys Monogr. 136, American Mathematical Society, Providence, 2007.
- [15] E. Crépeau, Exact boundary controllability of the Korteweg–de Vries equation around a non-trivial stationary solution, International Journal of Control, 74:11 (2001), 1096–1106.
- [16] O. Glass, Controllability and asymptotic stabilization of the Camassa-Holm equation, Journal of Differential Equations, 245 (2008), 1584–1615.
- [17] O. Glass and S. Guerrero, Some exact controllability results for the linear KdV equation and uniform controllability in the zero-dispersion limit, Asymptot. Anal., 60 (2008), 61–100.
- [18] O. Glass and S. Guerrero, Controllability of the Korteweg-de Vries equation from the right Dirichlet boundary condition, Systems Control Lett., 59 (2010), 390–395.
- [19] J.-P. Guilleron, Null controllability of a linear KdV equation on an interval with special boundary conditions, Math. Control Signals Syst., 26 (2014), 375–401.
- [20] D. J. Korteweg and G. de Vries, On the change of form of long waves advancing in a rectangular canal, and on a new type of long stationary waves, Phil. Mag. 39 (1895), 422–443.
- [21] E. Kramer, I. Rivas, and B.-Y. Zhang, Well-posedness of a class of initial-boundary-problem for the Korteweg-de Vries equation on a bounded domain, ESAIM Control Optim. Calc. Var., 19 (2013), 358–384.
- [22] E. Kramer and B.-Y. Zhang, Nonhomogeneous boundary value problems for the Korteweg-de Vries equation on a bounded domain, J. Syst. Sci. Complex, 23 (2010) 499–526.
- [23] D. Lannes, The water waves problem. Mathematical analysis and asymptotics. Mathematical Surveys and Monographs, 188. American Mathematical Society, Providence, RI, 2013. xx+32.
- [24] L. Rosier, Exact boundary controllability for the Korteweg-de Vries equation on a bounded domain, ESAIM Control Optim. Cal. Var. 2 (1997), 33–55.
- [25] L. Rosier and B.-Y. Zhang, Control and stabilization of the Korteweg-de Vries equation: Recent progress, J. Syst Sci Complexity, 22 (2009), 647–682.
- [26] J.-C. Saut and B. Scheurer, Unique continuation for some evolution equations. J. Diff. Eqs. 66 (1987), 118–139.