Bogdanov-Takens bifurcation of codimension in the Gierer-Meinhardt model
Abstract. Bifurcation of the local Gierer-Meinhardt model is analyzed in this paper. It is found that the degenerate Bogdanov-Takens bifurcation of codimension 3 happens in the model, except that teh saddle-node bifurcation and the Hopf bifurcation. That was not reported in the existing results about this model. The existence of equilibria, their stability, the bifurcation and the induced complicated and interesting dynamics are explored in detail, by using the stability analysis, the normal form method and bifurcation theory. Numerical results are also presented to validate theoretical results.
Key words: Gierer-Meinhardt model, Saddle-node, Hopf, Bogdanov-Takens bifurcation
1 Introduction
Early in [1], Turing discovered the common properties of the breakdown of spatial-temporal symmetry and the self-organization, selection, and stability of new spatial-temporal structures in systems, and proposed the idea of patterns as the results of diffusion driven instability. Since then more and more interests are focused on the Turing patterns and various models are put forward to describe the diffusion driven instability. One of the important models is the Gierer-Meinhardt model [2], which was proposed by Gierer and Meinhardt in 1972, and takes the following form
where and respectively represent the concentration of activators and inhibitors at spatial position and time . and are the source concentration of and , respectively. The first-order kinetics of activator and inhibitor are represented by and , respectively. and represent the diffusion coefficients of activators and inhibitors, respectively. Generally, it is necessary to assume , that is, .
In view of Turing’s idea about pattern formation, to explore the patterns in such model, it is very necessary to carry out the stability and instability analysis. Instability will be accompanied by bifurcation in the model. Then spatiotemporal patterns will follow from the different bifurcation. Until not, various results about bifurcation and the resulting complex dynamics in the Gierer-Meinhardt model have been obtained. When , and , Song et al. [3] studied the Gierer-Meinhardt model with saturation terms and obtained the pattern formation in the certain parameter space. The Hopf bifurcation, the effect of diffusion on the stability and the subsequent Turing pattern were presented in [4]. For the delayed a delayed reaction-diffusion Gierer-Meinhardt system, the bifurcation analysis was also carried out in [5]. With the different sources for activators and inhibitors, Hopf bifurcation was treated in [6]. For the codimension-2 bifurcation, in [7] the Turing-Hopf bifurcation was considered, without the saturation term. The Turing-Turing bifurcation was given in [8], the coexistence of multi-stable patterns with different spatial responses and the superposition for patterns were demonstrated.
Recently, some results are obtained about the localized patterns in the Gray-Scott system and the bifurcation of the general Gierer-Meinhardt model in [9]. The local one-dimensional Gierer-Meinhardt model was given by
| (1) |
where , and are all positive constants. However, when , the system still has more complex dynamics and could be further explored. In this work, it is found that the model could admit the saddle-node, the Hopf and the degenerate Bogdanov-Takes bifurcations of codimension-3, which is not absent in the system in [9]. Note that highly degenerate bifurcations are more difficult to deal with and the resulting dynamical behaviors are richer and more interesting, so they are attracting increasing interests from mathematics and applied sciences. For example, degenerate bifurcations and the induced complicated dynamics were presented in[10, 11, 12], such as the nilpotent cusp singularity of order 3 and the degenerate Hopf bifurcation of codimension 3. In [13], Huang et al. discovered that there existed a degenerate Bogdanov-Takens singularity (focus case) of codimension 3 in the predator-prey model. In [14], the Bogdanov-Takens of codimension 3 and the Hopf bifurcation of codimension 2 were also found to happen.
In this paper, we will elaborate on these aspects for system (1) with . The existence and their stability of equilibrium points are introduced in Section 2. Bifurcations, such as, the saddle-node bifurcation, the Hopf bifurcation and the Bogdanov-Takes bifurcation of codimension-3 are presented in Section 4. Finally, a brief summary is made in Section 5.
2 Existence and stability of equilibria
Now consider the system in the following form
| (2) |
Let , . Upon solving , we obtain the solutions or .
It is not difficult to get the boundary equilibrium of system (2). Next, to find the existence of positive equilibria of system, substitute into , then we have
The discriminant of is
It follows that
(i) if , then for ;
(ii) if , then has a real root ;
(iii) if , then has two distinct positive real roots,
So we have the following result.
Theorem 1.
System (2) has only one boundary equilibrium , and
(i) if , then there is no positive equilibria;
(ii) If , then there is a positive equilibrium ;
(iii) If ,then there are two positive equilibrium and .
Next the stability of the equilibria system (2) will be examined. First consider the boundary equilibrium . The Jacobian matrix of system (2) at equilibirum is
which has the eigenvalues and . Therefore, the equilibrium of system (2) is a stable node.
As for the stability of the equilibrium , we have
Theorem 2.
(a) If , then is a cusp of codimension three;
(b) If , then is a saddle-node with an unstable parabolic sector;
(b) If , then is a saddle-node with a stable parabolic sector.
Proof.
The Jacobian matrix of system (2) at equilibrium is
It follows that
Now translate into the origin by the translation , then system (2) is changed into
| (3) |
where
and , are terms of at least order five in and .
First, assume . Then both eigenvalues of are zero. Applying the transformation , we rewrite system (3) as
| (4) |
and , are terms of at least order five in and . Further, let , then (4) is transformed into the following form
| (5) |
where
and , are terms of at least order five in and .
To eliminate the term in (6), change system (6) with the following transformation [14]
then we get
| (7) |
where
and , are terms of at least order five in and .
Since , by the change of variables , we could turn system (7) into
| (8) |
where are terms of at least order five in and .
From the proposition in [15], we know that system (6) is equivalent to the system
where . Therefore, is a cusp of codimension three. This proves .
Next, assume . The eigenvalues of are and . Applying the transformation
then system (3) becomes
and are terms of at least order three in and . The coefficient of is . From Theorem 7.1 in [16], the origin is a saddle-node. Considering the time vatiable , if , then is a saddle-node with a stable parabolic sector; if , then is a saddle-node with an unstable parabolic sector. ∎
If , then has two equilibria. Finally, we discuss the stability of the positive equilibria and .
Theorem 3.
If , then the positive equilibrium of system (2) is always a saddle point and the positive equilibrium is
(a) a source if ;
(b) a center or a fine focus if ;
(c) a sink if .
Proof.
The Jacobian matrix of system (2) at equilibrium and are
Then we could have
and
So is always a saddle point. The positive equilibrium is determined by the sign of the trace . Specifically, when , i.e., , is a source; When , i.e., , is a sink. when ,i.e., , it is a center or a fine focus. ∎
3 Bifurcation
3.1 Saddle-node bifurcation
From Theorem 1 we note that the equilibrium points of system (2) vary as the parameter changes. When , there is no positive equilibrium point. When , there is a positive equilibrium. When , there are two positive equilibria. This indicates the saddle-node bifurcation may occur around .
Theorem 4.
When , the system (2) undergoes the saddle-node bifurcation around , with the threshold value .
Proof.
According to the Sotomayor’s theorem [17], we need to verify the transversality condition for the occurrence of saddle-node bifurcation at . The Jacobian matrix of system (2) at equilibrium is
Because of , has a zero eigenvalue . Let and represent the eigenvectors of and with respect to the eigenvalue , respectively.
Simple calculation gives
and
Further, we can obtain
Obviously, when , and satisfy the transversality conditions
and
Therefore, when the parameter goes from one side of to the other, the system (2) experiences the saddle-node bifurcation at the equilibrium point . ∎
3.2 Hopf bifurcation
From Theorem 3, it is found that the stability of the positive equilibrium of changes as the sign of varies, that will probably lead to the Hopf bifurcation around .
According to the Hopf bifurcation theorem, we need to verify the transversal condition. Based on the fact that , system (2) undergoes the Hopf-bifurcation around . Furthermore, we need to give the first Lyapunov coefficient and determine the stability of the limit cycle around .
Now translate to by and get the following form
| (9) |
where and are terms of at least order three in and .
From another transformation and , where , system (9) becomes
where
where and are also terms of at least order three in and .
Using the formal series method described in [16], we can calculate that the first-order Lyapunov number is
Then the following theorem is available.
Theorem 5.
When and , the system (2) at the equilibrium experiences the supercritical Hopf bifurcation with a stable limit cycle around .
3.3 Bogdanov-Takens bifurcation
When and , it follows from Theorem 2(a) that the unique positive equilibrium of system (2) is a cusp of codimension three. The Bogdanov-Takens bifurcation may occur arround . Now we select , and as bifurcation parameters, and the Bogdanov-Takens bifurcation may occur under parameter perturbation.
Theorem 6.
When and , the parameter varies within the small neighborhood of , where and are the Bogdanov-Takens bifurcation threshold values. Then system (2) undergoes the Bogdanov-Taken bifurcation of codimension 3 in the small neighborhood of .
Proof.
When and , it follows theorem 2(a) that is a cusp of codimension three of system (2). Perturb the parameters , and at , and and denote , where is a vector of parameters in the small neighborhood of . Then, the system (2) becomes
| (10) |
Then we translate into the origin by . The system (10) is changed into
| (11) |
where
Further, we execute the transformation and get
| (12) |
where
To verify that the Bogdanov-Takens bifurcation occurs at equilibrium point , we need to get the universal unfolding of system (9). So we need to eliminate , , , , , and terms. Next, we transform system (12) by the procedure similar to that in [18].
(A) In order to eliminate the term, take the transformation , then system (12) takes the following form
| (13) |
where
(C) Notice that . To removing the and terms, we transform system (14) with and scaling transformation to obtain the following system
| (15) |
where
(D) Since
by the transformation
we can obtain the following form
| (16) |
where
Additionally, has the same properties as .
(E) We have and with the help of MAPLE
Now, we want to turn and into and notice that the signs of the coefficients of and change as the signs of and . The details are as follows.
(i) If , then system (16) becomes the following form with the transformation and .
where
Additionally, has the same properties as .
(F) Finally, we get the universal unfolding with the transformation
| (17) |
where has the same properties as . There are three results corresponding to the three situations in (E).
(i) If , then the cofficients of system (17) are
(ii) If or , then the cofficients of system (17) are
(iii) If , then the cofficients of system (17) are
The bifurcation diagram for system (17) can be described as follows. If , there are no equilibria; if , then there is a saddle-node bifurcation plane in a small neighborhood of the origin ; if , then the system has two equilibria, a saddle and an anti-saddle. The remaining surfaces of the bifurcation diagram in have a conical structure, emanating from , which can be demonstrated by drawing its intersection with the half sphere
Now we project the traces onto the -plane for clear visualization.

Here we summarize the bifurcation in system (17) based on the above discussion. Figure 1 contains the Hopf bifurcation curve, the homoclinic bifurcation curve and the saddle-node bifurcation curve, which are represented by , and , respectively, where is the boundary of . The curves and have the first order contact with the boundary of at the points and . The curve is tangent to the curve at point and tangent to the curve at point , which is the saddle-node bifurcation curve of double limit cycles. The system (17) is a cusp singularity unfolding of codimension 2 around and .
Along the , when crossing the arc of from right to left, the curve is a subercritical Hopf bifurcation with an unstable cycle curve of codimension one. And the curve is a supercritical Hopf bifurcation with a stable cycle curve of codimension one when crossing the arc of from left to right. The Hopf bifurcation of codimension 2 occurs at point .
A homoclinic bifurcation of codimension 1 occurs along the curve . When crossing the arc of from left to right, the two parts of the saddle point coincide and an unstable limit cycle appears. And the two parts of the saddle point coincide and a stable limit cycle appears when crossing the arc of from right to left. A homoclinic bifurcation of codimension 2 occurs at point .
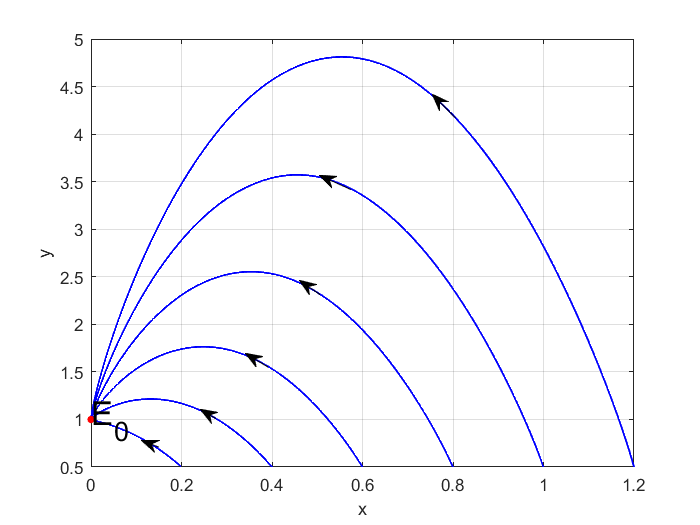
Then we give some numerical simulations about the system. In Figure 2, note that is a stable node when . In Figure 3, there is a boundary equilibrium point and a positive equilibrium point . As , is a cusp when ; is a saddle-node with the stable parabolic sector when ; is a saddle-node with the unstable parabolic sector when . There is a positive equilibrium in Figure 4. Choose , is a center when ; is a source when ; is a sink when . is a saddle point when , which is shown in Figure 5.







4 Conclusion
Bifurcation analysis of the Gierer-Meinhardt model is carried out. Besides the saddle-node bifurcation and the Hopf bifurcation, it is found that the degenerate Bogdanov-Takens bifurcation of codimension-3 appears in the model. That was not reported in the previous results. By a series of transformation and based on the bifurcation theory, including the Sotomayor’s theorem and the normal form method, the detailed bifurcation results are presented and more interesting dynamics are revealed. Theoretical findings are verified in numerical simulation. More further dynamics could be explored for the model.
Acknowledgments
This work was supported by the National Natural Science Foundation of China (Nos. 11971032, 62073114).
Conflict of Interest
The authors declare that there are no conflicts of interest.
Data availability statement
All data generated or analysed during this study are included in this published article or available upon request.
References
- [1] A.M. Turing, The Chemical basis of morphogenesis, Phil. Trans. Royal Soc. Lond. B 237(641) (1952) 1934-1990.
- [2] Gierer A, Meinhardt H, A theory of biological pattern formation, Kybernetik 12 (1972) 30-39.
- [3] Y. Song, R. Yang, G. Sun, Pattern dynamics in a Gierer-Meinhardt model with a saturating term, Appl. Math. Model. 46 (2017) 476-491.
- [4] R. Wu, Y. Zhou, Y. Shao, L. Chen, Bifurcation and Turing patterns of reaction-diffusion activator-inhibitor model, Physica A 482 (2017) 597-610.
- [5] R. Yang, X. Yu, Turing-Hopf Bifurcation in Diffusive Gierer-Meinhardt Model, Int. J. Bifurc. Chaos 32(04) (2022) 2250046.
- [6] R. Asheghi, Hopf Bifurcation Analysis in a Gierer-Meinhardt Activator-Inhibitor Model, Int. J. Bifurc. Chaos 32(09) (2022) 2250132.
- [7] R. Yang, Y. Song, Spatial resonance and Turing-Hopf bifurcations in the Gierer-Meinhardt model, Nonlinear Anal: Real World Appl. 31 (2016) 356-387.
- [8] S. Zhao, H. Wang, Turing-Turing bifurcation and multi-stable patterns in a Gierer-Meinhardt system, Appl. Math. Model. 112 (2022) 632-648.
- [9] F. Saadi, A. Champneys, Unified framework for localized patterns in reaction-diffusion systems, the Gray-Scott and Gierer-Meinhardt cases, Phil. Trans. R. Soc. A 379(2213) (2021) 20200277.
- [10] R.M. Etoua, C. Rousseau, Bifurcation analysis of a generalized Gause model with prey harvesting and a generalized Holling response function of type III, J. Differ. Equ. 249(9) (2010) 2316-2356.
- [11] Z. Shang, Y. Qiao, Multiple bifurcations in a predator-prey system of modified Holling and Leslie type with double Allee effect and nonlinear harvesting, Math. Comput. Simulat. 205 (2023) 745-764.
- [12] A. Arsie, C. Kottegoda, C. Shan, A predator-prey system with generalized Holling type IV functional response and Allee effects in prey, J. Differ. Equ. 309 (2022) 704-740.
- [13] J. Huang, X. Xia, X. Zhang, S. Ruan, Bifurcation of codimension 3 in a predator-prey system of Leslie type with simplified Holling type IV functional response, Int. J. Bifurc. Chaos 26(02) (2016) 1650034.
- [14] J. Su, M. Lu, J. Huang, Bifurcations in a Dynamical Model of the Innate Immune System Response to Initial Pulmonary Infection, Qual. Theor. Dyn. Syst. 21(2) (2022) 41.
- [15] Y. Lamontagne, C. Coutu, C. Rousseau, Bifurcation analysis of a predator-prey system with generalised Holling type III functional response, J. Dyn. Differ. Equ. 20(3) (2008) 535-571.
- [16] Z. Zhang, T. Ding, W. Huang, Z. Dong, Qualitative Theory of Differential Equations, Amer. Math. Soc., Providence, 2006.
- [17] L. Perko, Differential Equations and Dynamical Systems, 3rd ed., Springer, New York, 2001.
- [18] C. Li, J. Li, Z. Ma, Codimension 3 B-T bifurcations in an epidemic model with a nonlinear incidence, Discrete Contin. Dyn. Syst. Ser. B 20(4) (2015) 1107-1116.
- [19] S. Wiggins, M. Golubitsky, Introduction to Applied Nonlinear Dynamical Systems and Chaos, Springer, New York (2003).
- [20] F. Dumortier, R. Roussarie, J. Sotomayor, Generic 3-parameter families of vector fields on the plane, unfolding a singularity with nilpotent linear part. The cusp case of codimension 3, Ergod. Theor. Dyn. Syst. 7(3) (1987) 375-413.