Björling problem for zero mean curvature surfaces in the three-dimensional light cone
Abstract.
We solve the Björling problem for zero mean curvature surfaces in the three-dimensional light cone. As an application, we construct and classify all rotational zero mean curvature surfaces.
Key words and phrases:
Zero mean curvature surfaces, Björling representation2020 Mathematics Subject Classification:
Primary 53A10; Secondary 53B30.1. Introduction
The classical Björling problem [bjorling_integrationem_1844] poses the following question: Suppose that a curve and a unit vector field along in the Euclidean 3-space are given so that
where denotes the differentiation with respect to , and is the standard Euclidean inner product. The goal is to find a minimal surface which contains and whose unit normal along is the prescribed . Due to the Weierstrass representation of minimal surfaces [weierstrass_untersuchungen_1866], this problem can be solved via analytic extensions of and to the complex plane:
where denotes the standard Euclidean cross product. The curve and the prescribed normal together are called the Björling data. Such Björling type problems are well studied across various types of surfaces in various space forms (see, for example, [alias_bjorling_2003, asperti_bjorling_2006, brander_bjorling_2010, brander_bjorling_2018, dussan_bjorling_2017, kim_spacelike_2011, kim_prescribing_2007, yang_bjorling_2017]).
The Björling data can be slightly modified by noting that is perpendicular to and of the same length to . Thus if is prescribed then one can recover via , allowing us to adopt and instead of and as Björling data. Geometrically, the vector field of the Björling data is equivalent to the prescription of the tangent vector field of the surface that is perpendicular to along . This change in viewpoint of the prescribed data for the Björling problem proved to be useful for obtaining the (singular) Björling representation [kim_prescribing_2007] for maxfaces [umehara_maximal_2006] and generalized timelike minimal surfaces [kim_spacelike_2011] in Lorentz -space, and also the Björling representation for zero mean curvature surfaces in isotropic -space [seo_zero_2021].
Our goal of the paper is to solve the Björling problem for zero mean curvature surfaces in the -dimensional light cone . In the similar cases of other quadrics of Lorentz -space, namely, the hyperbolic -space and de Sitter -space , the tangent space is isomorphic to either the Euclidean -space or the Lorentz -space, respectively. Thus one can use the cross product in the tangent space to obtain Björling representations [yang_bjorling_2017] in an analogous manner to the Euclidean case. However, the tangent space to is isomorphic to isotropic -space, so that it does not have a cross product structure. Therefore, for the Björling problem in , we use the alternative viewpoint and assume that the given Björling data consists of a spacelike analytic curve , together with a spacelike vector field along the curve, and find the zero mean curvature surface which contains and has as a tangent vector field along .
The paper is structured as follows: After reviewing the basic geometry and surface theory of in Section 2, we describe the process to solve the Björling problem for a given spacelike analytic curve with prescribed tangent vector field in Section 3, culminating in the Björling representation for zero mean curvature surfaces in -dimensional light cone (see Theorem 3.8). As an application, we construct and classify (see Theorem 4.4) rotationally invariant zero mean curvature surfaces in in Section 4. Furthermore, many surfaces admitting Weierstrass representations in various space forms with indefinite metric can be extended across lightlike lines (see, for example, [akamine_reflection_2021, akamine_reflection_2022, akamine_space-like_2019, fujimori_analytic_2022, fujimori_zero_2015-1, umehara_hypersurfaces_2019]); we give an example of such surface in in Section 4.5.
2. Preliminaries
We first briefly review the geometry of three-dimensional light cone, and the surface theory within. For a detailed description, see [liu_surfaces_2007, liu_hypersurfaces_2008, liu_representation_2011].
2.1. Hermitian matrix model of three-dimensional light cone
Let denote the Lorentz -space, with inner product
The Lorentz -space can be identified with the set of Hermitian matrices via
where we will abuse notation between vectors and matrices. Then for any ,
so that
We note here that the symmetric bilinear form is well-defined for all .
Defining
we see that form an asymptotically orthonormal basis of .
In the Hermitian model, hyperbolic -space , -dimensional light cone , and de Sitter -space can be defined as quadrics in via
respectively. Note that for any , there is some such that
where denotes the conjugate transpose of .
When we visualize surfaces in , we will use the following stereographic projection
Then is identified with .
2.2. Surface theory and Weierstrass-type representation
Let be a two-dimensional simply-connected domain, and suppose is a spacelike immersion, that is, the induced metric on the tangent plane of at every point is Riemannian. Then for conformal coordinates with complex structure given via , suppose that the first fundamental form is given by
for some . Furthermore, we have so that there exists a unique lightlike such that
| (2.1) |
Such is called the Gauss map of , and the coefficients of the second fundamental form is then computed in terms of via
Hence, the shape operator is
with the (extrinsic) Gaussian curvature and mean curvature given by
Those surfaces with will be referred to as zero mean curvature surfaces.
We recall the Weierstrass-type representation for zero mean curvature surfaces in the three-dimensional light cone [liu_representation_2011, Theorem 3.2] (see also [pember_weierstrass-type_2020, § 4.2] and [seo_zero_2021, Theorem 39]):
Fact 2.1.
Any zero mean curvature surface can locally be represented as
where satisfies
for some meromorphic function and holomorphic -form such that is holomorphic. The pair is called the Weierstrass data.
3. Solution of the Björling problem
Using the Weierstrass-type representation in Fact 2.1, we will now solve the Björling problem for zero mean curvature surfaces in . Unlike the cases of hyperbolic -space and de Sitter -space , the Björling data we consider will be an analytic curve together with a tangent vector field due to the lack of cross product structure in the tangent space of .
3.1. The conformality condition for the Björling data
For an interval with parameter , let be a spacelike analytic curve and be an analytic spacelike vector field along such that
| (3.1) |
Geometrically, the conditions (3.1) ensure that will be a tangent vector field; thus, we refer to (3.1) as the conformality condition. Our goal is to find a zero mean curvature surface which contains and which has as a tangent vector field along .
Note that if there is a such a zero mean curvature surface , then
| (3.2) |
Thus, from and , we will construct such -form .
Remark 3.1.
An important distinction from the cases of and is that is not invertible since . Thus, instead of considering as in the cases of and , we consider the equation as in (3.2).
For Björling data and satisfying conformality condition (3.1), let and . Then on one dimensional domain , (3.2) implies that we must solve for satisfying
| (3.3) |
We claim that there is a unique which solves (3.3).
Note that because of (3.1), and that since it is a curve in . By standard theory we know that
Therefore
for some functions and -form . We rewrite (3.3) as
| (3.4) |
By examining and components of (3.4), we see that and where
| (3.5) |
On the other hand, by examining and components of (3.4), we see that and where
| (3.6) |
It is immediate to see from the fact that . Then
Hence, it is enough to show that the denominators are the same.
For this matter, we multiply (3.4) with the adjunct of from the right to obtain
However, we have that since it is a curve in . Therefore, the left hand side is a zero matrix. In particular, its trace is 0; hence
implying that .
Now, the expressions for and in (3.5) and (3.6) implies that the Björling data and satisfying (3.1) must additionally satisfy
| (3.7) |
Unfortunately, the conformality conditions (3.1) alone does not guarantee this; one can even construct explicit examples where the expression (3.7) vanishes for some Björling data satisfying the conformality conditions.
3.2. The orientability condition for the Björling data
To give a geometric interpretation of the condition (3.7), we define the following notion.
Definition 3.2.
For two linearly independent spacelike vectors spanning a Riemannian subspace of , let be an orthonormal basis of such that there is some with for . The signed area of and , denoted by , is defined via
An important feature of the signed area is the fact that it is invariant under orientation-preserving isometries of . On the other hand, the square of the signed area (or the squared area) can be calculated using the inner product of the ambient Lorentz -space:
Lemma 3.3.
For linearly independent spacelike vectors spanning a Riemannian subspace , we have
Proof.
Let be an orthonormal basis such that for with . Writing
for some constants , we calculate that
On the other hand, we have
giving us the desired conclusion. ∎
The next lemmata give additional geometric criteria for the Björling data to satisfy (3.7) in terms of the signed area.
Lemma 3.4.
Given Björling data and satisfying the conformality condition, the signed area of and does not vanish.
Proof.
Suppose for contradiction that . Then direct calculations show that for some . Thus
which is a contradiction since is spacelike. ∎
Lemma 3.5.
Given Björling data and satisfying the conformality condition, and are well-defined if and only if the signed area of and is negative.
Proof.
Fix any throughout the proof. Since signed area is invariant under orientation-preserving isometries, we may assume without loss of generality that , so that any vector in takes the form
for some . By the conformality conditions (3.1) on the Björling data, we have that ; therefore, there are some constants such that
Since , we calculate that
so that
| (3.8) | ||||
Now since -component does not affect the signed area, we note that
However, we can also calculate that
allowing us to deduce that
On the other hand, Lemma 3.3 and the conformality conditions (3.1) imply that
so that
Thus, using (3.8) allows us to conclude that
Therefore, and are well-defined if and only if . ∎
Remark 3.6.
The signed area condition of Lemma 3.5 encodes the fact that the orientation of and must be correct. For this reason, we call the signed area condition, the orientability condition.
Remark 3.7.
The orientability condition is unnecessary for the Björling data in other quadrics such as and ; the crucial difference arises in the definition of the (lightlike) Gauss map used to define the second fundamental form. In the case of and , the Gauss map and the position vector must satisfy ; however, in the case , we have that , so that one cannot switch the signs on the Gauss map freely.
We summarize our results in the next main theorem of our paper, the Björling representation for zero mean curvature surfaces in the -dimensional light cone:
Theorem 3.8.
Consider as a subset of identified with . Given a spacelike analytic curve and an analytic vector field satisfying the conformality condition
and the orientability condition
there exists a unique zero mean curvature surface such that
for all . It is given by where is a solution to
where is an element of the domain of and is the solution of
4. Rotational zero mean curvature surfaces in
In this section we construct and classify rotationally invariant zero mean curvature surfaces, which we call catenoids of the -dimensional light cone. The Björling problem is especially apt for the construction of such surface as the initial curve can be selected as the orbit of a single point under rotations of .
First, we define rotational surfaces in analogously to the definition given in hyperbolic spaces [do_carmo_rotation_1983, Definition 2.2] (see also [abe_constant_2018, Definition 3.1]):
Definition 4.1.
Let denote a -dimensional subspace of . Choosing some and such that , let denote the set of orthogonal transformations that leave fixed. For a regular curve in that does not meet , we call the orbit of under the action of a rotational surface generated by . Furthermore, we say that the rotational surface is
-
•
an elliptic rotational surface if the induced metric on is Lorentzian,
-
•
a parabolic rotational surface if the induced metric on is degenerate, and
-
•
a hyperbolic rotational surface if the induced metric on is Riemannian.
The following facts will be useful in recovering the explicit parametrizations of the catenoids from the rotationally invariant Björling data:
Fact 4.2 ([yang_bjorling_2017, Lemma 4.2]).
For ,
is a solution to
| (4.1) |
where . Furthermore, also solves (4.1) where controls the initial condition.
Fact 4.3 ([yang_bjorling_2017, Lemma 4.2]).
For , let
is a solution to
| (4.2) |
Furthermore, also solves (4.2) where controls the initial condition.
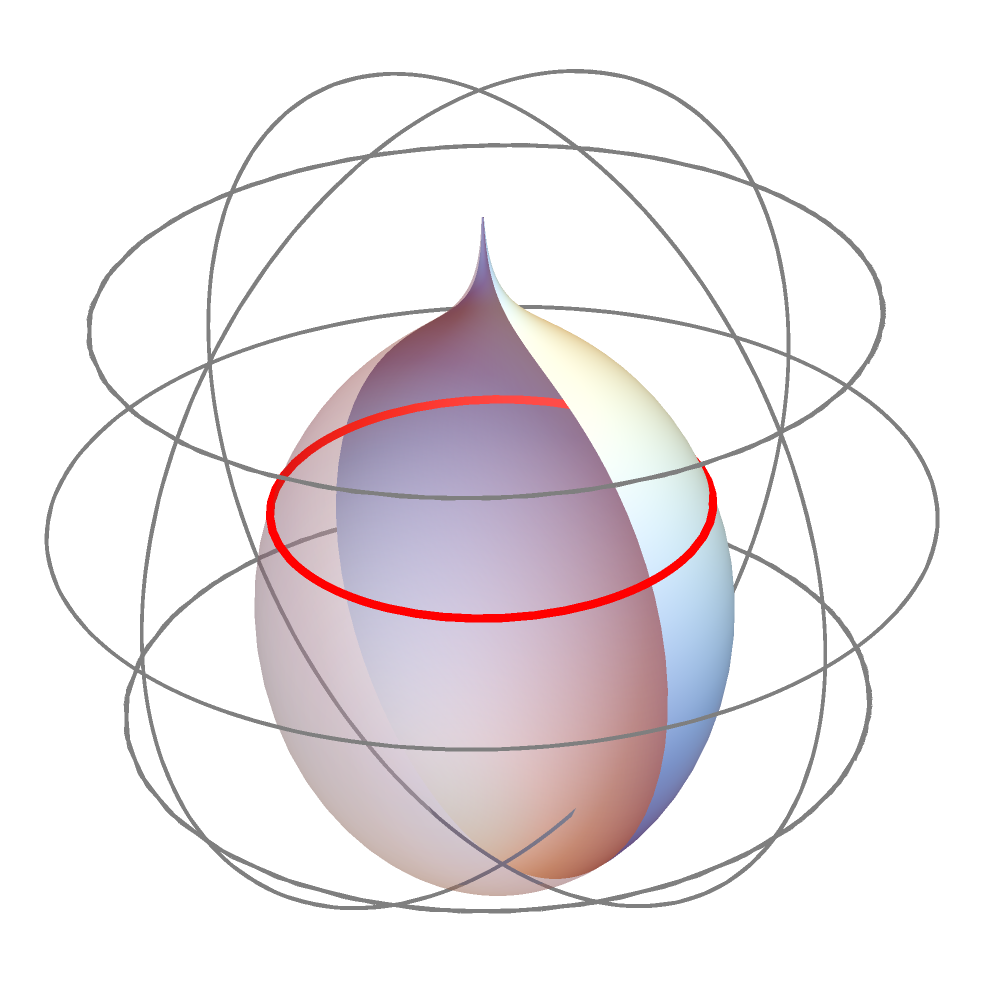
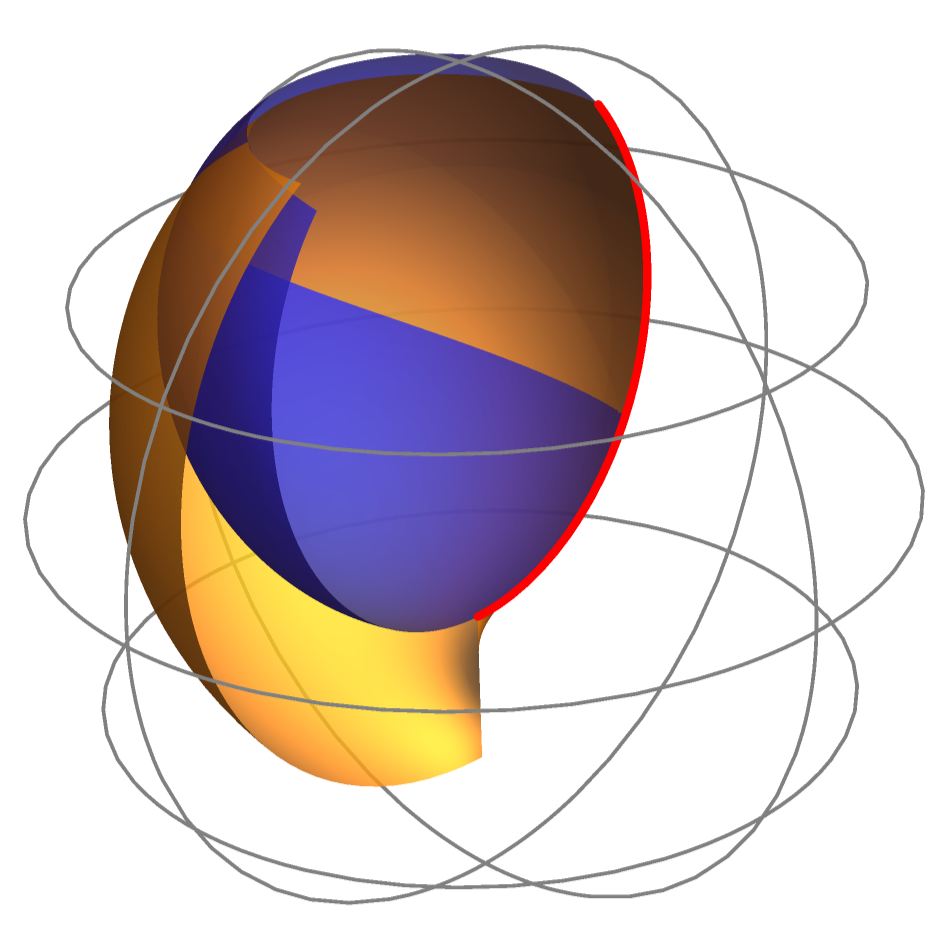
4.1. Elliptic catenoids
Consider an elliptic rotation
applied to the point to obtain an elliptic circle
Note that and that .
To complete the Björling data, we first note that any satisfying the conformality condition must be of the form
for any function . Now, we can check that fails the orientability condition, that is,
while satisfies the orientability condition.
Thus we take , and note that for rotationally invariant surfaces, we must have that is generated by the elliptic rotation under consideration, i.e.
Thus, we find that
and we have is a constant function so that
Considering and as the Björling data, we use the Björling representation in Theorem 3.8 to calculate that
To obtain explicit parametrizations, we analytically extend and and change the variables via
Then
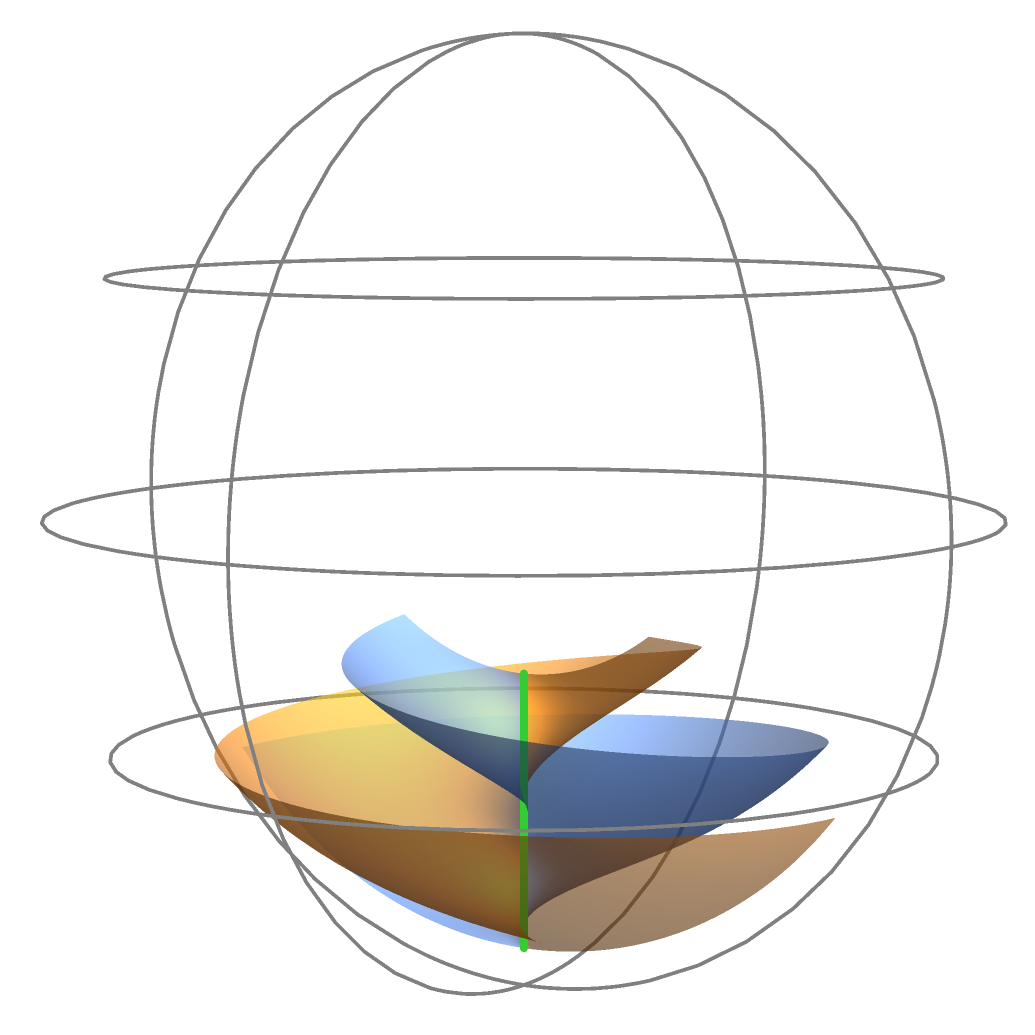
allowing us to use Fact 4.2 to compute the explicit parametrizations for the elliptic catenoid:
where (see also Figure 1).
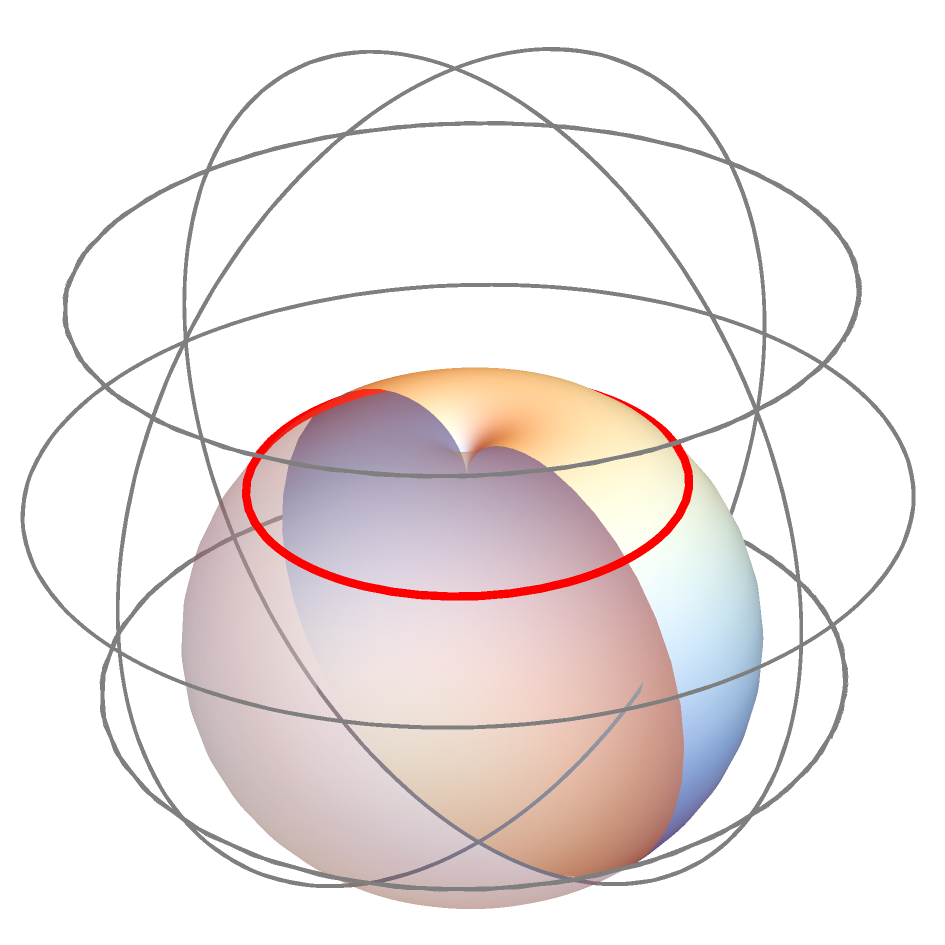
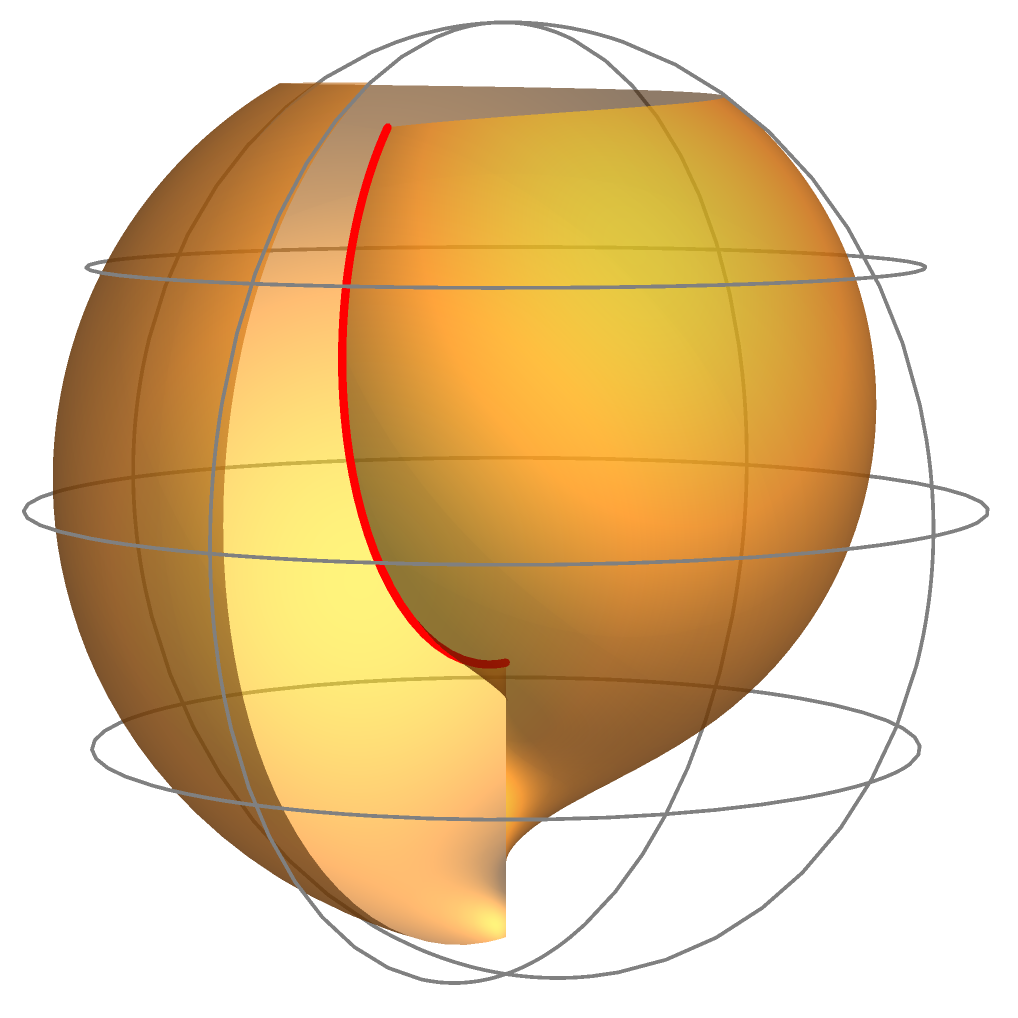
4.2. Hyperbolic catenoids
Given a one parameter group of hyperbolic rotations
the curve
is a hyperbolic circle. Note that and that .
To find the Björling data, we find that any satisfying the conformality condition must take the form
for any function . Since fails the orientability condition, we set . We also have that is generated by the rotation under consideration; thus,
for some constant .
Now, we calculate the Björling data as
Analytically extending and and letting
so that
we can use Fact 4.2 to compute the explicit parametrizations for hyperbolic catenoid:
where (see Figure 2).
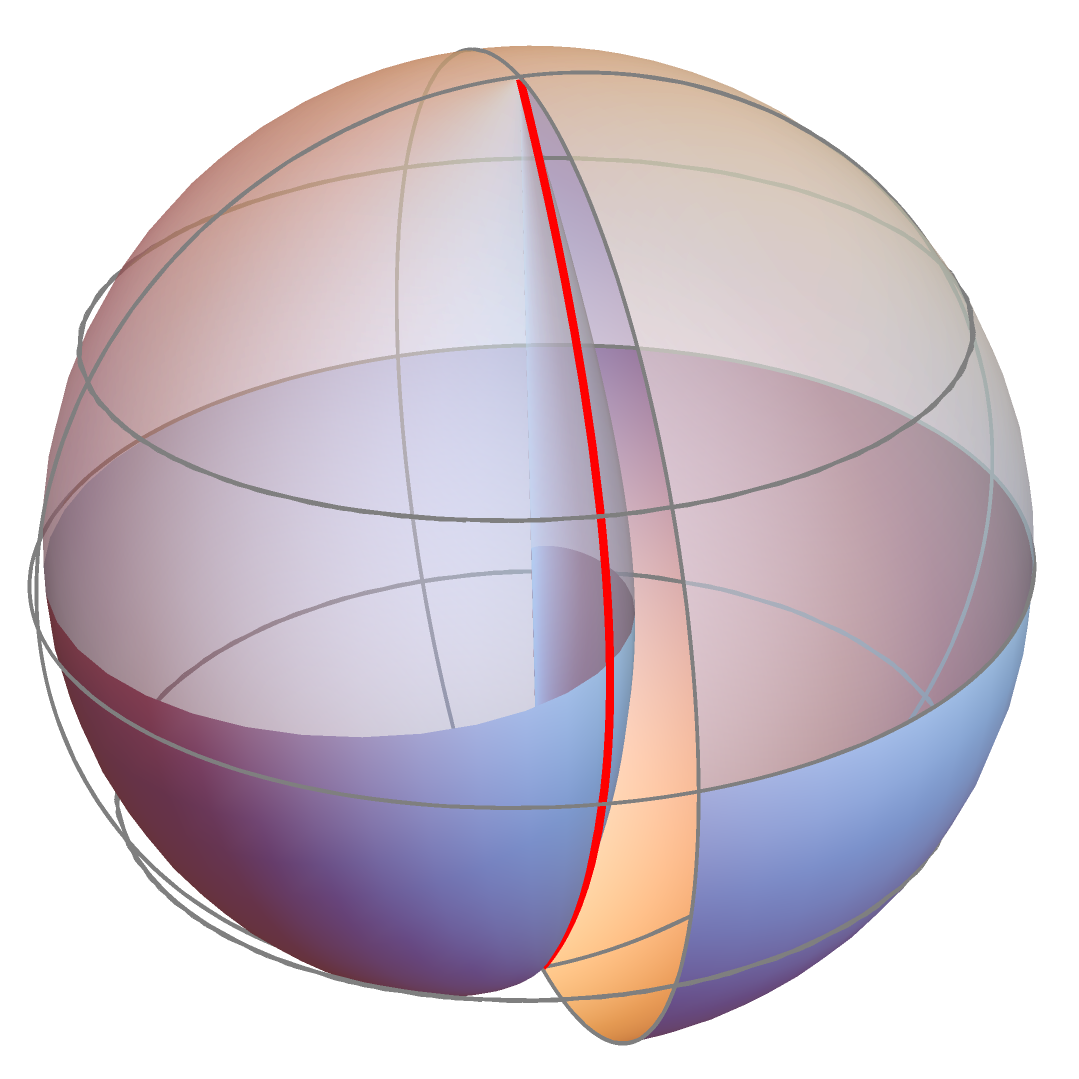
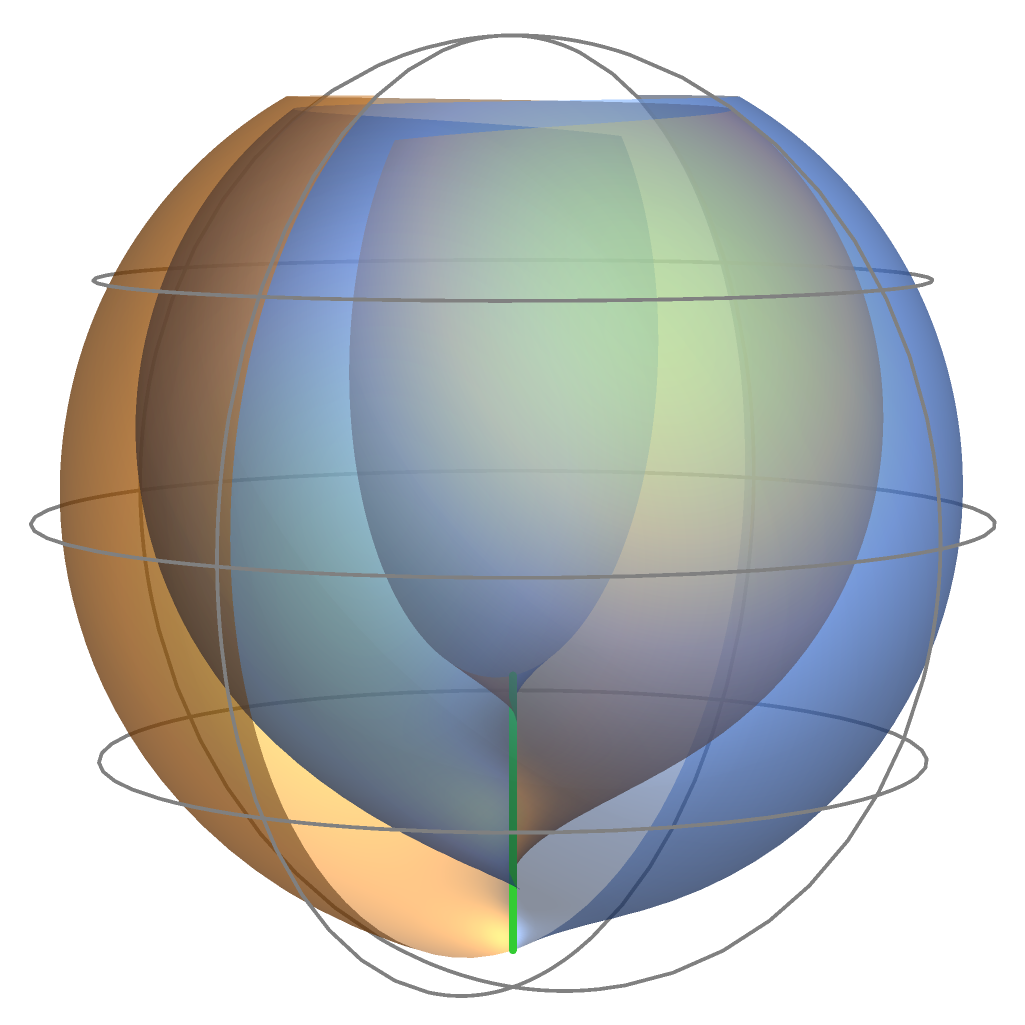
4.3. Parabolic catenoids
Finally, we consider the parabolic rotation
applied to the point to obtain a parabolic circle
Note that and that .
We note that any satisfying the conformality condition must satisfy
for some function , and direct calculation tells us that fails the orientability condition. Thus, we choose , and the fact that must generated by the rotation under consideration allows us to deduce that
for some constant .
Using and as the Björling data, we calculate that
Analytically extending and and making change of coordinates so that
we have
This allows us to use Fact 4.3 to obtain explicit parametrizations for the parabolic catenoids:
where (see Figure 3).
4.4. Classification of rotationally invariant zero mean curvature surfaces
Any circle in is congruent to one of the circles we constructed as orbits of points under rotations up to homotheties and isometries. Thus we conclude:
Theorem 4.4.
Any rotationally invariant zero mean curvature surfaces in must be a piece of one of the following surfaces (given with its respective Weierstrass data):
-
•
elliptic catenoid
-
•
hyperbolic catenoid , or
-
•
parabolic catenoid
up to homotheties and isometries of .
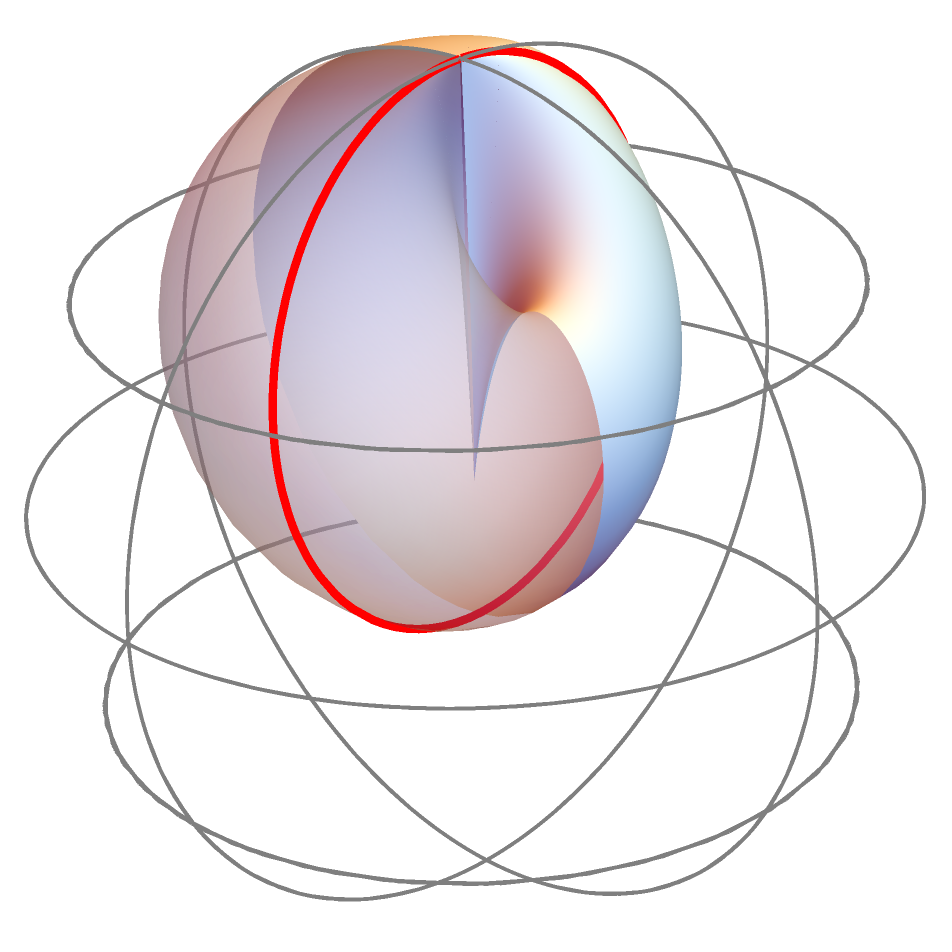
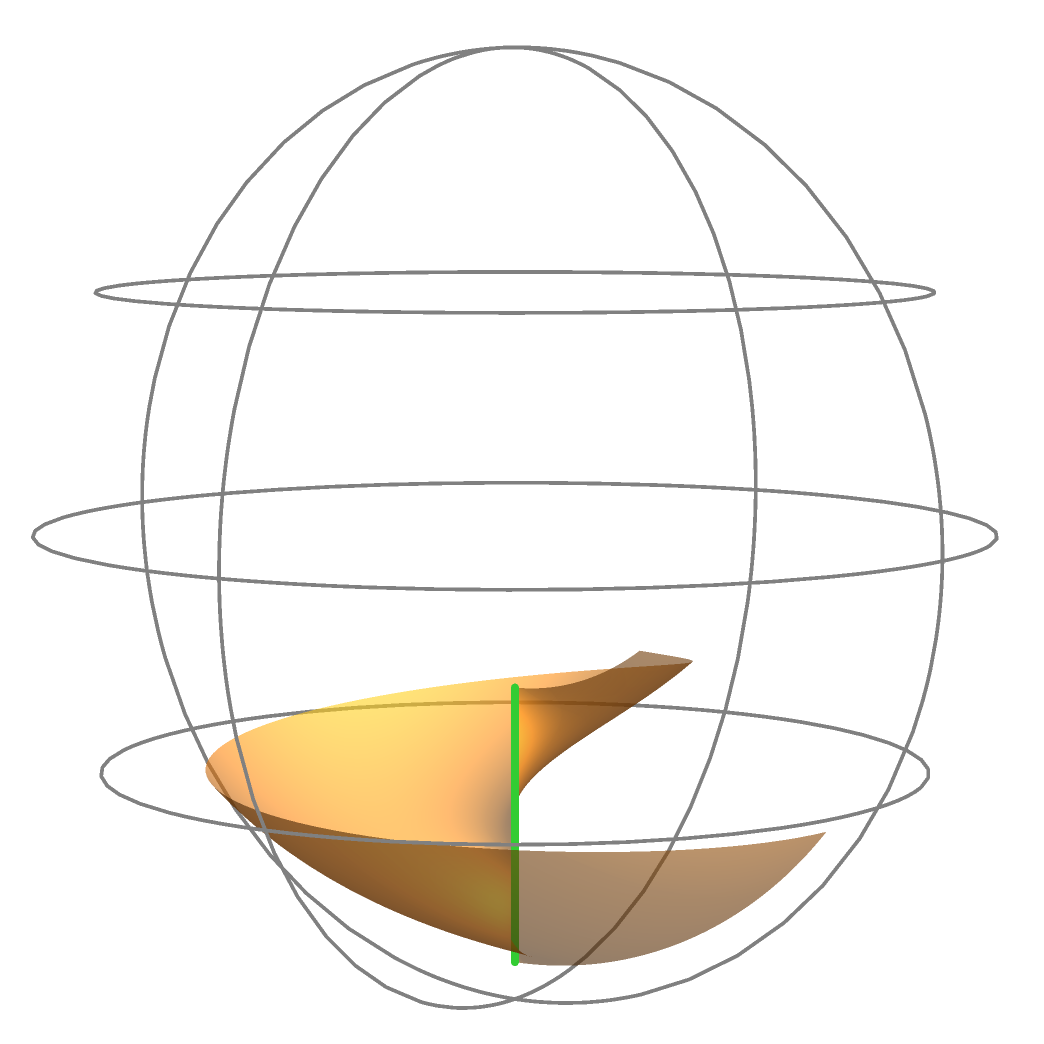
4.5. Additional example with analytic extensions
As in the parabolic catenoid case, let us take the parabolic circle as the initial curve, i.e.
We have seen that for any function satisfies both the conformality condition and the orientability condition.
Now, if we take
for , then we have is not generated by the rotation under consideration; thus, the resulting surface will not be rotationally invariant. We can still calculate that
Analytically extending and and letting
so that
we can use Fact 4.2 to compute the explicit parametrizations:
where (see Figure 4).
If we change parameters so that , then we obtain
so that
This implies is a lightlike curve in . In fact,
and thus is a lightlike circle. Therefore, we have that is an analytic extension of across the lightlike circle (see Figure 5).
Acknowledgements. The last author gratefully acknowledges the support from NRF of Korea (2017R1E1A1A03070929 and NRF 2020R1F1A1A01074585).