14cm(4cm,1cm)
This article is now published in the Journal of Field Robotics.
Under the new title ‘Autonomous aerial robotics for package delivery: A technical review’
DOI: https://doi.org/10.1002/rob.22231
Autonomous Aerial Delivery Vehicles, a Survey of Techniques on how Aerial Package Delivery is Achieved
Abstract
Small unmanned aerial vehicles have gained significant interest in the last decade. More specifically these vehicles have the capacity to impact package delivery logistics in a disruptive way. This paper reviews research problems and state-of-the-art solutions that facilitates package delivery. Different aerial manipulators and grippers are listed along with control techniques to address stability issues. Landing on a platform is next discussed which encompasses static and dynamic platforms. Landing on a dynamic platform presents further challenges. This includes the delayed control responses and poor precision of the relative motion between the platform and aerial vehicle. Subsequently, risks such as weather conditions, state estimation and collision avoidance to ensure safe transit is considered. Finally, delivery UAV routing is investigated which categorises the topic into two areas: drone operations and drone-truck collaborative operations. Additionally, we compare the solutions against design, environmental and legal constraints.
1 Introduction
Aerial vehicles have been widely used in different domains [Chen et al., 2020b]. This includes; disaster management [Demiane et al., 2020], precision agriculture [Adão et al., 2017] and entertainment [Huang et al., 2018]. They have also been useful in providing services such as infrastructure inspection [Phung, 2017] and sensor monitoring [Rossi, 2015]. One such application that has gained recent attention is the delivery of packages [Shakhatreh et al., 2019]. This method of package transportation has been studied traditionally for helicopters [Bernard and Kondak, 2009, Bisgaard et al., 2007]. However, more recently researchers have investigated other platforms. One such example is Amazon Prime Air, which aims to deliver packages of up to five pounds in less than 30 minutes111https://www.forbes.com/sites/stevebanker/2021/04/01/amazon-supply-chain-innovation-continues/. Other companies that have shown interest in delivery unmanned aerial vehicles (UAV) include: DHL222https://www.dhl.com/discover/business/business-ethics/parcelcopter-drone-technology, Manna333https://news.samsung.com/global/samsung-partners-with-manna-to-launch-drone-delivery-service-to-irish-customers, Google Wing444https://www.businessinsider.com.au/alphabets-drone-delivery-service-wing-has-made-thousands-of-deliveries-in-australia-during-the-pandemic-2020-5, UPS555https://www.businessinsider.com/ups-drone-delivery-health-pandemic-covid-19-ignition-bala-ganesh-2020-10?r=US&IR=T and Zipline666https://www.bbc.co.uk/news/technology-52819648. Researchers have also investigated how aerial package delivery can deliver medical materials [Amicone et al., 2021] and supplies to aid against the Covid-19 infection [Sharma et al., 2021]. Accomplishments like these continue to appear in news headlines; however, UAV delivery is impeded by design constraints and strict flight restrictions. This paper reviews the technical problems of UAV package delivery and the accompanying state-of-the-art recommendations. Additionally, we consider the design, environmental and legal constraints within the context of unmanned aerial delivery vehicles. Within the literature, several terms are used to describe an unmanned aerial vehicle. This includes ‘drone’ and ‘remotely piloted aircraft’ (RPA). For brevity and consistency, we use the term unmanned aerial vehicle (UAV) as it is the most commonly used term within the literature. The general pipeline of the delivery UAV is shown in Figure 1 which illustrates each stage of the last-mile delivery process.
First, the vehicle obtains the payload from a warehouse or a collaborative truck. For this stage, the vehicle can be grounded when at a warehouse and perching or hovering when interacting with a collaborative truck. Given this initial location, the vehicle needs an actuation method to accommodate the payload. This can be achieved manually using human interaction or a robotic actuation mechanism which automatically grips onto the payload. Once the payload is secured, a path is calculated either using individual or parallel global planning. Once calculated, the vehicle needs to produce enough thrust to become airborne using different thrust-generating mechanisms. In transit, the aerial vehicle needs to ensure safety through cooperative and uncooperative perception and collision avoidance methods while considering conditions of the environment such as the weather. Once the vehicle arrives at the parcel zone where it delivers the parcel either through landing, hovering in place and lowering the parcel or through a parachute. Finally, with the parcel delivered, the vehicle can return to the depot or companion truck.
The entire taxonomy of the survey is shown in Figure 2. In Section 3 and 4 we discuss the problems associated with handling the payload which includes manipulation and gripping. Next, in Section 5, we discuss literature pertaining to landing on a static and dynamic platform, which is inspired by the last-mile delivery problem. Section 6 discusses all the risks a delivery UAV may face during transit. In Section 7, we discuss the UAV routing problem which is based on the travelling salesman problem and vehicle routing problem. Finally, we conclude with an overview of the problems and state-of-the-art solutions along with future trends.
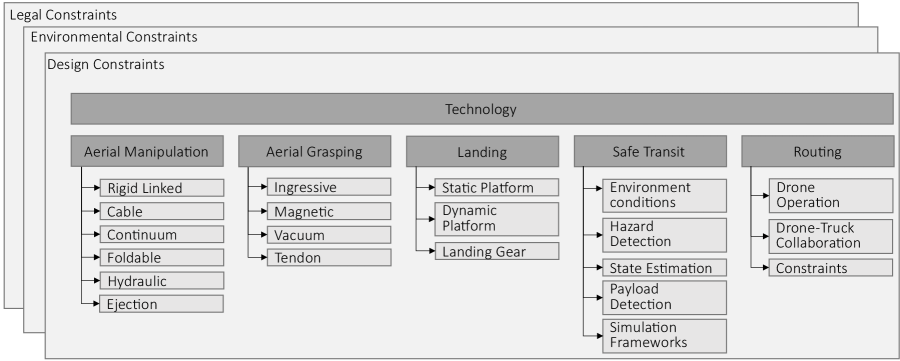
Table LABEL:tab:surveys shows relevant papers that review topics within autonomous package delivery. However, to our knowledge, we are the first to collect literature pertaining to the entire pipeline of an aerial delivery vehicle. which is then evaluated against design, environmental, and legal constraints.
2 Design, Environmental and Legislative Constraints
Constraints limit the capabilities of the aerial vehicle to perform its task of package delivery. Khosiawan and Nielsen define three elements when considering employing a UAV for a certain application; task, environment and operation system [Khosiawan and Nielsen, 2016]. They describe the task as the activity performed by the UAV, in this case, package delivery. The environment is the surroundings and infrastructure where the UAV is situated such as the landing zone and transit space. Finally, they define the operating system as the design and infrastructure to enable the UAV to perform its task. This includes the aerial manipulation device, landing gears, and sensors.
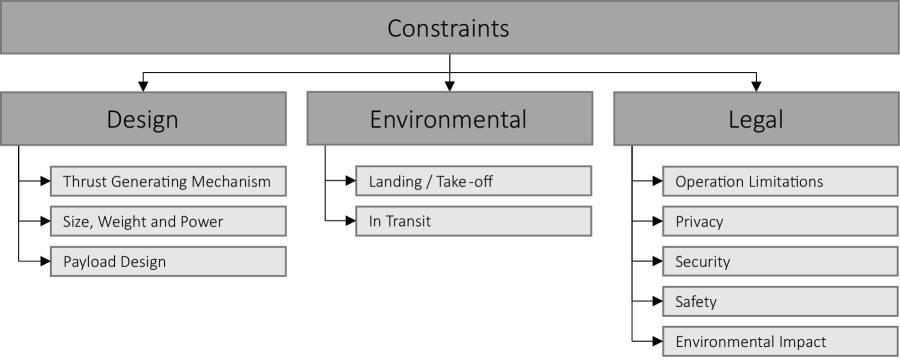
For this review, the constraints are classified into three groups; design, environmental and legislative. Design constraints consist of physical restrictions when engineering the vehicle. This can be further broken down into the choice of the thrust generating mechanism, the trade-off this thrust generating mechanism has on the components or size of the vehicle, and finally the payload design. Environmental constraints consist of the physical surroundings which dictate the difficulty and safety of traversing a certain area. These factors determine the sensing capability and manoeuvrability of the vehicle. Two major environments consist of both in-transit and landing zones. Both with varying levels of obstacles, satellite signal and navigation difficulty. Finally, legislative constraints consist of restrictions that are enforced. This varies from the responsibility for the UAV system to the guidelines for physical flight and social impact. These constraints are illustrated in the tree diagram, Figure 3.
2.1 Design Constraints
To enable flight, thrust forces must be generated to offset the weight of the aircraft. This thrust can be generated in various forms such as airflow over an aerofoil, dynamic wings, or rotating propellers. The advantages and disadvantages of these designs are discussed with a summary in Table 1. Then, the size, weight and power of the components and design need to be considered. Finally, the design of the payload needs to be considered which includes geometry, gripping points, contents, and weight.
2.1.1 Thrust generating Mechanism
UAV sizes can vary dramatically; typically the most notable difference surrounds the propulsion mechanism, and fuselage design [Hassanalian and Abdelkefi, 2017, Macrina et al., 2020, Singhal et al., 2018]. Alternatively, UAVs can be classified by weight and wingspan [Hassanalian and Abdelkefi, 2017]. Based on the propulsion mechanism, UAVs can be classified into three main categories: fixed-wing, rotary-wing and flapping-wing [Shraim et al., 2018] as shown in Figure 4.




Fixed-wing aircraft, as the name suggests, consist of a rigid wing that is used to generate lift from the aircraft’s forward motion. These types of aircraft can also use a motor and propeller as their propulsion system. Due to the aerodynamic efficiencies, fixed-wing UAVs have a long flight time and can cover a wide range of environments. Because of this, fixed-wing vehicles can carry large payloads for long distances, consuming less power compared to other UAV designs. The disadvantage is the requirement of constant forward motion to provide lift, and therefore fixed-wing vehicles do not have the ability to be stationary and are less manoeuvrable.
Rotary-wing designs rely on rotors to produce lift and torque about the centre of rotation. The most common rotary-wing designs come in the form of a helicopter, which contains one rotor, or a multi-rotor such as a quadcopter, hexacopter or octocopter. The torque generated from these motors causes instability. For multi-rotor designs, rotors spin in symmetrically opposite directions to offset this generated torque, whereas helicopters possess a tail rotor. These vehicles do not require constant movement since the lift is generated by the rotors, and therefore these vehicles can perform stationary operations and can vertically take off and land easily. Alternatively, they are able to perform aggressive manoeuvres such as within racing events [Culley et al., 2020]. These manoeuvres, however, can lead to high energy throughput.
Flapping-wing based designs take inspiration from birds or insects. The propulsion mechanism consists of flexible and flapping wings which use an actuated mechanism for the flapping motion [Hassanalian and Abdelkefi, 2017]. The flexible [Nguyen and Chan, 2018, Phan et al., 2017] and lightweight [Han et al., 2021] wing properties are important for aerodynamic proficiency and flight stability.
Hybrid designs combine fixed, rotary or flapping-wing vehicle concepts together in an attempt to gain additional benefits. One example is the hybrid fixed-wing vertical take-off and landing (VTOL) vehicle [Gu et al., 2017]. This vehicle has two independent propulsion systems for hover and level flight. The aircraft takes off vertically using the lift force generated by the rotors. Then while hovering, a push motor is used to gain forward momentum allowing the aircraft to behave like a conventional fixed-wing UAV. Therefore, this design benefits from the vertical lift-off from rotary-wing designs and gains the added aerodynamic efficiencies and extended flight time of the fixed-wing design. Other designs include tilt-wing [Cetinsoy et al., 2012], tilt-rotor [Chen and Jia, 2020], tilt-body [Ro et al., 2007], and ducted fan [Deng et al., 2020]. A comparison between all the designs discussed above is shown in Table 1. For further analysis the reader can direct their attention to [Shraim et al., 2018].
| Rotary-Wing | Fixed-Wing | Flapping-Wing | Hybrid | |
|---|---|---|---|---|
| Top Speed | High | High | Low | High |
| Turning Radius | Low | Medium | Medium | Medium |
| Energy Consumption | High | Low | High | Medium |
| Complexity and Repair Cost | Medium | Low | High | High |
| Payload Capacity | Medium | Medium | Low | Medium |
| Accuracy of Delivery | High | Low | Low | High |
| Noise Pollution | Medium | Medium | Low | High |
| Vertical Takeoff | Yes | No | Yes | Yes |
| Hover Capability | Yes | No | No | Yes |
Highly manoeuvrable vehicles can avoid obstacles and traverse more complicated environments. Furthermore, global planners can consider a turning radius, leading to more efficient routing and allowing for a broader range of accessible routes. Fixed-wing vehicles tend to have large turning circles compared to other designs due to their thrust-generating mechanism. Comparably, rotary-wing designs can perform a range of manoeuvres, including aggressive flight paths, enabled by the availability of multiple thrust-generating components. It has been shown in the literature that quadrotors are differentially flat under-actuated systems [Faessler et al., 2018]. From a motion planning perspective, this property enables better tracking capabilities for aggressive flight. Reducing energy consumption increases the travel time of the aerial delivery vehicle. Increasing this allows the vehicle to visit either more customers or remote locations. Several studies have compared the energy consumption of last-mile delivery for UAVs and lorries. Stolaroff et al. analysed the impact of aerial delivery vehicles compared to delivery trucks. The authors found that UAVs consumed less energy throughout the delivery process than trucks. However, they also found an increased requirement of warehouses storing packages due to the limited flight range. Furthermore, more complex actuation is required, as discussed later, can lead to more moving parts and in general higher costs associated with repair. Since fixed-wing designs have fewer moving parts than rotary wing designs the number of failure points increases, leading to higher long-term costs. Finally, payload capacity depends on the payload’s size, weight and available space within the vehicle’s frame. Larger thrust forces, using more powerful motors, can allow for heavier payloads at the cost of more power consumption. Furthermore, larger packages can impact aerodynamics and restrict component placement.
2.1.2 The SWAP constraint
The capability of aerial vehicles are bound by the relationship between the on-board computation, thrust generating mechanism, limited size and space, and sensing capabilities. This is also known as the size, weight and power (SWAP) trade-off [Chung et al., 2018]. This relationship also limits the available weight and size of a payload. Bulky payloads require more thrust to carry, which requires more power. Furthermore, higher moments of inertia and a greater offset of the centre of mass can lead to unstable motion, potentially reducing flight speeds and increasing flight time and risk.
2.1.3 Payload Design
The container design, which houses the cargo being delivered by the vehicle, requires special consideration to ensure secure attachment. While also guaranteeing the safety of the payload and any entities that come in range of the vehicle. This is crucial due to potential turbulence experienced during flight that could displace the payload from the chassis or damage it while inside the housing. Secure attachment of the payload is based on the type of gripper used and any modifications to the payload design that aids this gripper technique. Attachments can range from specific material properties such as ferrous materials for magnetic grippers. Or puncture points for ingressive grippers and specific geometric shapes that aid in higher force exertion. The shape and position of the payload also affects the aerodynamics of the vehicle, degrading flight efficiency. The payload will induce a drag force on the vehicle if exposed to external elements. Furthermore, the payload can also lead to a disruption in the lift force generated by the thrust generating mechanism. Further aggravating known effects such as the ground effect. Finally, expanding upon the SWAP constraints, a larger payload leads to more volume being preoccupied. Therefore, leading to less capacity for sensors and equipment.
2.2 Environment Constraints
Khosiawan and Nielsen classify different environment zones based on the characteristics of each area [Khosiawan and Nielsen, 2016]. The ease of navigation for each zone varies as there can be different hazards or weather conditions that affect flying capabilities.
| Landing / Takeoff | In Transit |
|---|---|
| Stationary delivery (target within a garden) | Urban area (cities and towns) |
| Stationary re-package (storage facility, warehouse or depot) | Low populated (woodland or farmland) |
| Moving re-package (truck for drone-truck collaborative operation) |
For this paper, we have found it helpful to categorise environments into either landing/takeoff or transit, shown in Table 2. Then, further classify transit areas based on population density and landing/takeoff based on the task of the vehicle. Densely populated areas lead to higher concentrations of people and assets, and therefore larger risk associated with the delivery compared to lower populated areas. Alternatively, delivering and re-packaging are sub-tasks for the unmanned aerial delivery vehicle to undertake. The location for delivery may be within private property such as within the curtilage of a garden which can have legal implications. Furthermore, dynamic obstacles, such as people or pets, in unknown and potentially GPS-denied environments would require state-of-the-art intelligent navigation algorithms. Re-packaging can be done either at a warehouse or on a truck through drone truck collaborative operations. Dynamic landing platforms, such as above a truck, require coordinated control schemes to ensure stable landing which can be done through specialised landing gears or perching.
2.3 Legal Constraints
Many regulatory bodies have been established to aid policymakers in creating new laws for UAVs, specifically delivery UAVs. This includes the International Civil Aviation777https://www.icao.int along with national organisations such as the Civil Aviation Authority888https://www.caa.co.uk in the United Kingdom. These organisations are appointed by governments to establish national or international standards and to ensure consistent compliance. Stöcker et al reviews current national and international regulations from around the globe [Stöcker et al., 2017]. They illustrate globally varying degrees of rigidity and maturity. The following section aims to demystify the legislative constraints on UAVs within the context of package delivery. Furthermore, the parameters that affect these regulations are also discussed. This includes operational limitations, privacy, security, safety, and environmental impact.
2.3.1 Operation Limitations
Operational regulations refer to the restrictions of physical flight. Due to the novelty of autonomous flight, regulatory bodies are hesitant to introduce rules for these types of vehicles. In contrast, the regulations governing remotely piloted aircraft, which are better defined. This is not to be confused with automatic operation, such as a pre-programmed instruction, where the remote pilot can intervene. Autonomous navigation is still a new field, and organizations are hesitant to provide guidance on regulations and standards until a common understanding can be reached. Pilots must be able to take control of the unmanned aircraft at any time, except when the data link is lost999https://www.easa.europa.eu/sites/default/files/dfu/AMC%20&%20GM%20to%20Part-UAS%20%E2%80%94%20Issue%201.pdf. Some operations require permission, which depends on the operation’s complexity [Stöcker et al., 2017]. Furthermore, pilots may take tests and practical training to show competency, with some countries requiring pilot and UAV registration.
Flying Restrictions
Most countries have defined horizontal distances to points of interest and no-fly zones [Stöcker et al., 2017]. This includes safe reach away from people, property and other vehicles, also known as self-separation. Examples include airports and government buildings. Currently, UAVs present a severe risk and, therefore, are not allowed to fly in controlled airspace or within the proximity of people. Furthermore, some regulators prevent flights over congested areas such as towns, cities and roads [Stöcker et al., 2017]. In this case, delivery UAVs would struggle to operate within urban areas and would possibly require special flight corridors101010https://news.sky.com/story/uks-first-commercial-drone-corridor-to-open-in-reading-next-summer-12162260.
Current regulations aim to separate manned aircraft and UAVs, only allowing UAV flights within a specific altitude [Stöcker et al., 2017]. For example, within the United States, the FAA defines the minimum safe altitude of 500 feet above the surface of non-congested areas like cities111111https://www.law.cornell.edu/cfr/text/14/91.119. Furthermore, the legislation also requires emergency landing capability in case of power unit failure to fly at any altitude. Also, flying over private property without permission can lead to trespassing. In the case of an accident, the victim could be compensated for personal injury or damage to property.
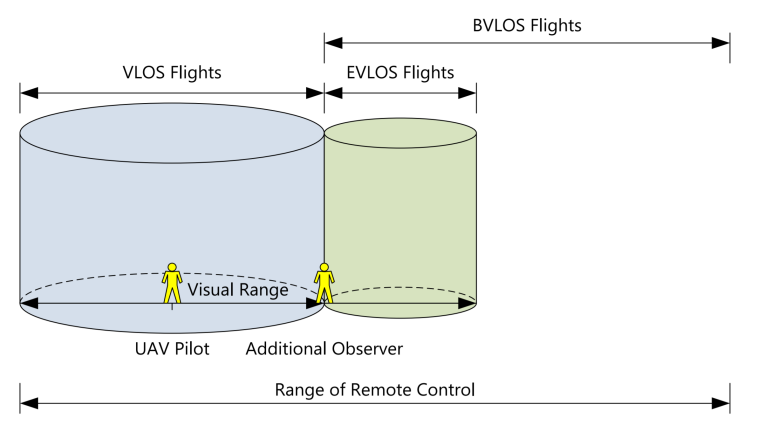
Flight restrictions also include the radial distance from the aircraft to the pilot. There exist three ranges: visual line-of-sight (VLOS), extended visual line-of-sight (EVLOS), and beyond visual line-of-sight (BVLOS) [Davies et al., 2018]. Figure 5 visualises these three ranges. VLOS conditions require the pilot to maintain unaided visual contact with the aircraft. In contrast, BVLOS enables operations outside the visible range of the pilot. Organisations and regulators are currently working towards updating policy to enable BVLOS, with some predictions estimating BVLOS operation within the year 2035121212https://www.sesarju.eu/sites/default/files/documents/reports/European%20ATM%20Master%20Plan%20Drone%20roadmap.pdf. EVLOS provides remove pilots support from another deployed observer who can maintain VLOS with the aircraft. Potential risks and issues can therefore be communicated back to the remote pilot131313https://publicapps.caa.co.uk/docs/33/CAP%201861%20-%20BVLOS%20Fundamentals%20v2.pdf.
Package delivery is legally achievable through VLOS by employing a combined drone-truck operation. Legislation must be flexible to enable package delivery while protecting against trespassing. This would require accompanying standardization to ensure public safety and positive opinion toward this operation.
Technical Prerequisite
Pilots must consider technical requirements before a flight can commence. For example, recently, the FAA has mandated all aircraft over 25 kg requires an ADS-B out device141414https://www.faa.gov/nextgen/equipadsb/. This device allows the aircraft to broadcast its position, orientation and velocity to nearby vehicles. However, additional sensors and components lead to less space and further restrict the payload capacity.
2.3.2 Privacy
Research on privacy has been motivated by the advances in technology which forces society to re-imagine what and where private space is [Nelson et al., 2019]. Nelson et al. uses the definition of private space as an area that is free from sensory interference or intrusion [Nelson et al., 2019].
Data from Sensors
According to Nelson’s definition, a person’s privacy is threatened due to the UAV’s ability to manoeuvre freely within an environment without many restrictions. Sensor data is required for state estimation, like visual odometry and mapping algorithms to perform autonomous navigation. Hence, capturing data of private property within the landing zone for package delivery or unintentionally distinguishing objects can easily be done [Vannoy and Medlin, 2018]. Furthermore, more complicated algorithms can be used to record and identify people through facial recognition and interpret behaviours [Mittal et al., 2020].
Governments have addressed this issue by updating regulations to protect citizens’ privacy. In the UK, operators flying UAVs with cameras or listening devices must follow the General Data Protection Regulation151515https://register-drones.caa.co.uk/drone-code/protecting-peoples-privacy. It is the responsibility of the engineers to ensure protection measures are in place. ’Privacy-by-design’ must be incorporated to protect technically embedded data [Stöcker et al., 2017].
Lost Package
Another major privacy concern is the sensitive information placed on the package along with the contents. Within a medical setting, customer-sensitive information can be compromised if the UAV made the delivery to the wrong location or if the payload was lost through malfunction or theft. The correlation between a person’s name, address and prescription could enable criminal activities such as identity theft. Lin et al. explains authentication systems would ensure data protection in the event of a misplaced delivery [Lin et al., 2018].
Trust
The outlined privacy risks and safety issues have led to a negative perception of UAVs. Winter et al. studied the emotional response of two types of police missions involving UAVs in the United States [Winter et al., 2016]. Their results showed citizen privacy concerns were more significant for continuous operation within the police force. To the author’s knowledge, a further study would be helpful to analyse the emotional response to continuous commercial operations such as package delivery.
Researchers explain that the lack of trust in UAVs can be somewhat attributed to a lack of knowledge and experience [Nelson et al., 2019]. Nelson and colleagues study how an individual’s perception of privacy violation correlates with the familiarity with UAVs. Their study shows that individuals who have had exposure to UAVs understand the capabilities and regulations surrounding these vehicles. They are somewhat less concerned with the growing presence of UAVs regarding privacy than more naive citizens [Nelson et al., 2019]. Therefore, the authors suggest that further improvements in public education on the topic of UAVs would result in a significant increase in public agreement.
2.3.3 Security
The two main methods of communication between UAVs and a ground station are radio and WiFi [Zhi et al., 2020, Yaacoub et al., 2020]. These two communication methods contain several vulnerabilities that can affect the security of the UAV. These methods include Denial of Service (DOS), De-authentication, Man in the Middle, Unauthorised root access, and package spoofing [Westerlund and Asif, 2019].
Sensor Spoofing
A spoofer can attempt to manipulate the navigation system of the UAV by spoofing GPS signal. For this to happen, however, the spoofer needs to know the UAV’s position, guidance system and target location. Along with the status and internal signal processing method of the receiver installed [Seo et al., 2015]. The spoofed GPS signals need to radiate in the direction of the UAV with a signal strength similar to a genuine GPS signal. In reality, it is challenging to know all this information without having access to the system. Alternatively, other sensors like a visual odometry system have flaws. For example, optical flow spoofing has been shown to be effective in areas where there are fewer surface features [Davidson et al., 2016].
Radio Frequency Spectrum Attacks - Denial of Service and Manipulation
Kulp and Mei identify types of cyber-attacks against delivery UAVs which would aid in designing an attack detection system [Kulp and Mei, 2020]. They show a range vector can be used to maliciously manipulate the navigation system of the UAV with hostile intent. DOS attacks prevent a user from accessing a machine or network by flooding the target with traffic. Researchers have investigated the impact of these attacks by sending requests to the UAV over the network [Hooper et al., 2016]. DOS attacks have been found to influence the performance of the UAV negatively. Including a decrease in sensor functionality, drops in telemetry feedback and reduced response to remote control commands [Vasconcelos et al., 2019]. If the data link is unencrypted, a malicious actor could take control and perform different control commands [Hooper et al., 2016]. Alternatively, the hacker could predict the frequency-hopping spread spectrum pattern by reverse-engineering the transmitter or receiver. With delivery systems, malicious actors may be interested in the theft of packages or disruption of service [Kulp and Mei, 2020]. Hardware used for detecting these threats increases the weight and complexity of the UAV. Hence, the security benefit must exceed these disadvantages.
2.3.4 Safety
The number of UAVs entering the airspace is increasing, which has raised concerns regarding the risks to current manned aircraft. Human factors, sense and avoid techniques, and redundancy techniques can improve the safety of other members within the airspace and members of the public. Furthermore, these risks impact insurance policies, standard operating procedures, and the delivery UAV design.
Human Factors
Human factors play a significant role in the safety of UAVs. Multiple practices and standards aid in reducing the risk associated with human factors which includes crew resource management, standard operating procedures, and safety management systems [Weldon et al., 2021]. These procedures are standard within the aviation industry, but more literature is required to understand how these standards can be applied to delivery UAVs. Regulation regarding safety is based on proportional and operation-centric approaches [Stöcker et al., 2017]. This approach entails focusing on the contents and conditions of the operation rather than just the characteristics of the UAV, which provides more flexible regulation. Hierarchical and more strenuous pilot testing for riskier tasks can further eliminate human errors. Further training may be required when operating a delivery UAV, which includes operating the aerial manipulator or how to safely protect the payload and UAV during a fault.
Collision Avoidance
Equivalent collision avoidance capabilities to current manned aircraft are required to integrate UAVs into the national airspace safely [Yu and Zhang, 2015]. Typically, pilots rely on ’see-and-avoid’ while utilizing other detect and avoid techniques. These techniques include ground-based infrastructure, electronic identification, onboard detect and avoid equipment, and traffic management software. For VLOS operation, the pilot has environmental knowledge. However, for BVLOS the operator only receives sensory information from the onboard sensors. Sensory information is limited as the limited field-of-view camera images and other sensors provide a partially observable understanding of the environment. Furthermore, sensory cues lose critical information like sound, kinaesthetic and an ambient view [Yu and Zhang, 2015]. A certificate of airworthiness may be required to fly the aircraft. This certificate ensures the aircraft conforms to its manufacturing design and provides a further regulatory barrier for unsafe equipment. Difficulties in obtaining this certificate may be due to unconventional designs such as an aerial manipulator system in delivery UAVs.
Hazards
Typical safety hazards may include control issues from transmission loss, collisions, partial or complete failure of navigation systems or components or structural integrity, severe weather or climatic events, and take-off and landing. In the context of delivery UAVs, hazards can be specifically identified. However, there is a lack of literature pertaining to the identification of safety hazards and risk management for delivery UAVs. In general, additional risks include dropping the payload, take-off and landing on private property, aerial manipulation and ensuring separation between a citizen or personal belongings and the manipulators’ configuration space.
Insurance
The availability of commercial insurance is essential for risk management and to aid in commercialization. Insurance involves understanding all the parameters that influence risk. Risks include the legality, operational use, training and experience or the list of human factors, system reliability and system value. Specifically for delivery UAVs, this can include payload characteristics, aerial manipulation design and landing methodology (especially for drone truck collaboration). Insurance provides a clear advantage of indicating a regime that sufficiently compensates for harm or damage caused by the flight operation [Stöcker et al., 2017]. Rapidly evolving technology within the field is leading to difficulty for insurance companies. Hence, as mentioned in this section, these companies will need to embrace the constantly changing policies along with rapid changes to design, environmental and social-political constraints.
2.3.5 Environmental Impact
Delivery UAVs can affect the environment through noise and disruption to wildlife. These disruptions can depend on the size and design of the aircraft, and can lead to further resistance against the adoption of delivery UAVs.
Noise Pollution
Noise emission through delivery manoeuvres close to citizens in urban areas or flight corridors is an emerging problem. Research suggests noise from propellers can be considerably more irritating than road traffic or passenger aircraft noise [Schäffer et al., 2021, Christian and Cabell, 2017]. This noise is caused by pure tones and high-frequency broadband sounds. Using psychoacoustic testing, researchers can quantify the irritation level and impact of UAV noise pollution. Further research compared psychoacoustic indices of stimuli from different types of aircraft. The research from Torija et al. showed quadrotors caused the highest irritation than other aircraft and road vehicles [Torija, 2019]. The authors found that the most significant factor of this result was the quadcopter’s higher loudness, sharpness and tonality. Finally, Gwak et al. analysed the annoyance level with respect to the size of the UAV [Gwak et al., 2020]. They found that larger drones lead to higher annoyance levels due to variations in tonal characteristics, sharpness and fluctuational in strength of the sound.
The most dominant source of noise is the propulsion system which can include a combination of engine or motor and propeller [Miljkovic, 2018]. Noise generated from the airframe is considered to be negligible at lower speeds in comparison to other sources of noise. Therefore, fixed-wing-based UAVs appear to be the quietest compared to other thrust-generating designs. Hybrid-based designs, like the VTOL, gain this advantage while also being able to land vertically, allowing for more precise package delivery compared to fixed-wing designs. Alternatively, researchers have investigated passive and active methods to reduce UAV noise [Miljkovic, 2018]. These methods include modifying the blade shape, absorbing and reflective barriers, ductive propellers and active noise control. Active methods, such as active noise control, require additional power which contributes to the SWAP constraints but tends to be better at cancelling noise.
Aesthetic Impact
Similar to the irritation of noise, the increased use of airspace could lead to further resistance against the inclusion of delivery UAVs [Nentwich and Horváth, 2018]. Furthermore, impact with the environment such as bird migration would cause disruption to natural habitats [Gray and Weston, 2021]. Risks like these could be solved via global routing problems and flight corridors.
3 Aerial Manipulation
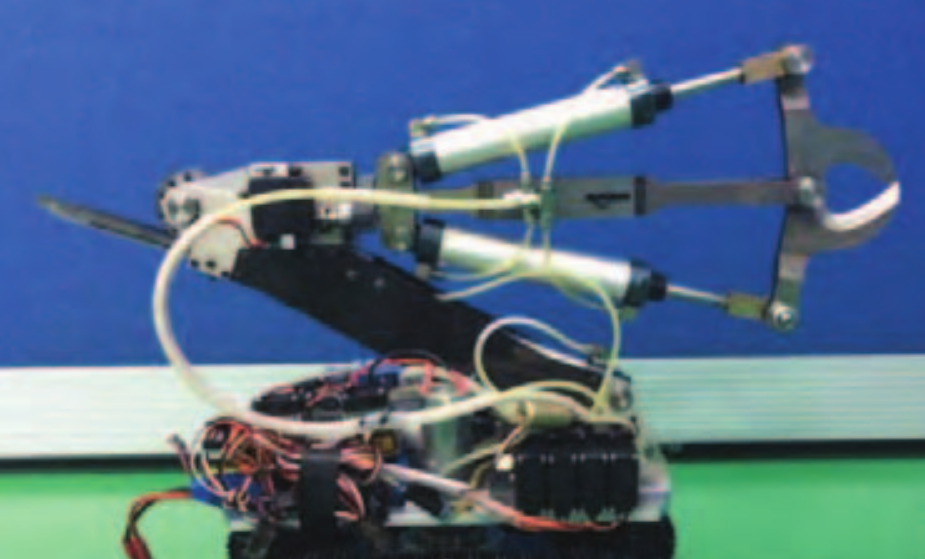
Aerial manipulation is a new field of research that allows UAVs to interact with the environment physically. The combination of a robotic manipulator, for example, the Kinova Jaco robot arm [Chaikalis et al., 2020], attached to a UAV is known as an Unmanned Aerial Manipulator (UAM) [Bartelds et al., 2016]. Many research projects, such as the ARCAS161616https://ec.europa.eu/digital-single-market/en/blog/arcas-project-manipulation-and-assembly-air-new-powerful-drones and AEROARMS projects [Ollero et al., 2018], have been funded to investigate this task. Many literature review articles [Bonyan Khamseh et al., 2018, Korpela et al., 2012, Ruggiero et al., 2018, Meng et al., 2020, Mohiuddin et al., 2020] have been written about aerial manipulators that the reader should also direct their attention to. In contrast, this section aims to encapsulate a wide range of manipulating techniques that have the potential for package delivery. We also cover stability issues when carrying a payload using rigid linked, cable, continuum, foldable, hydraulic and ejection based manipulators. Papers addressing these manipulation techniques are grouped within Table LABEL:tab:manipulators. For a complete list of control algorithms used for stabilising UAV flight, the reader should direct their attention to [Nguyen et al., 2020].

Control of the aerial manipulator is a significant challenge in all stages of flight, especially when carrying a payload. There are different techniques for formulating the dynamic model and control algorithms while incorporating disturbances from the payload. The algorithms incorporated vary depending on the application and manipulator used. Furthermore, there are various solutions for pick-and-place of the payload. The following sections outline solutions to these problems for each manipulator. Then finally, the research problems found are evaluated.
3.1 Discussion
Table LABEL:tab:manipulator_problems lists all of the open problems and recommended state-of-the-art solutions found throughout the section.
The manipulator causes a coupling effect between itself and the movement of the UAV which results from the manipulator’s inertia. Centralized kinematic and dynamic models used to formulate the kinematics and dynamics within control systems aim to take this coupling effect. However, it is difficult to formulate the model due to the non-linearity and higher order set of equations. Therefore, an accurate physical model is barely ever obtained [Meng et al., 2020]. Many control algorithms typically used for UAVs can be modified to deal with the coupling effect from the manipulator movement, known as Decentralized models. Modelling both the manipulator and UAV separately is easier to do, and the coupling effect can be quantified through centre of mass or moments of inertia properties. However, this approach can only be used for slow relative motion between the manipulator and UAV. This is because the technique works best when the velocity of the centre of mass offset, Coriolis force and centrifugal force are small [Meng et al., 2020].
The cable-suspended control problem is similar to a pendulum stabilization problem. Smooth trajectories are not optimal, but tend to be more stable to generate control outputs from. Aggressive trajectories allow for larger load swings with periods of variable cable tension. This allows UAVs to navigate through cluttered environments and avoid obstacles easier as more dynamic manoeuvres can be achieved. These manoeuvres would not be possible if the cable was to remain taut. However, aggressive manoeuvres with varied tension are computationally complex and researchers are still investigating experiments outside of simulation [Villa et al., 2020].
Force transfer between the payload and the UAV depends upon the tension of the cable. Different states of lifting results in a variation of this tension. Discretized torsion modelling relies on specialized controllers for each stage and a supervisory system which switches between each one [Villa et al., 2020]. The transition between each stage can lead to instabilities. Alternatively, a full torsion model for the variation in cable tension can be calculated. Furthermore, some researchers attempt to measure the force physically using a load cell attached to the cable and the UAV.
Multi-agent manipulation can be utilized to carry heavier loads rather than increasing the thrust force of a singular UAV. Further coupling is experienced between the payload(s) and other UAVs. The complexity of the problem is defined by the number of dynamic couplings between the vehicles and payloads. More coupling forces experienced lead to more complex problem formulations. Cooperative manipulation allows for information sharing. However, control signals would need to be synchronized to achieve collision avoidance. Alternatively, uncooperative manipulation treats the dynamics of the cable and payload as disturbances acting on the UAV. However, the uncertainty of the other vehicles can lead to potentially unstable configurations.
Folding-based actuators are effective at reducing the space consumed by the mechanism. This enables mobile robots to overcome access issues in cluttered environments. This can include a folding manipulator or even links connecting the thrust generating mechanism to fold around the payload. Furthermore, this allows adaptations to the airflow to reduce the grounding effect. This effect, as mentioned, is caused by the lack of airflow to the thrust generating mechanism. However, these mechanisms result in a lack of structural stiffness.
4 Aerial Grasping
Grasping mechanisms placed at the end of manipulators on an aerial vehicle are known as aerial grippers. An aerial gripper provides the vehicle with the force required to secure the payload and stabilise it during flight. Table LABEL:tab:endeffectors shows the many different approaches researchers have investigated to solve this challenge. Comparison parameters, defined here and illustrated within this table, are inspired by the review conducted by Mohiuddin et al. [Mohiuddin et al., 2020]. Active grasping is achieved through active control, also known as haptic feedback, which utilises sensors and actuators working together to obtain the desired force requirement. In contrast, passive grasping is achieved via attaching a passive mechanical element, such as a spring, in a joint to create the allowance for large deflections.
Many of the grippers mentioned in this section can also facilitate docking, also known as perching. Docking can be used to anchor the UAV to the surrounding environment [Mohiuddin et al., 2020], allowing the UAV to save energy rather than hovering in position. This action has many uses for autonomous package delivery, such as last-mile delivery, where perching on ground vehicles provides energy savings. The feasibility of this is further discussed later in Section 6.
There are many challenges with aerial grasping. The first is the speed and force of the gripping behaviour, which is restricted by the weight constraints and limited choice of actuators [McLaren et al., 2019], limiting the mechanism and components. Second is the finite number of materials each end-effector can grip. For example, magnetic-based grippers can only apply magnetic forces to ferrous objects. Furthermore, the thrust generated by the motors becomes a problem when attempting aerial grasping. If the UAV is too close to the ground, the ground effect can cause a change in thrust generated. The reduction in thrust is due to the interaction of the rotor airflow with the ground surface [Sanchez-Cuevas et al., 2017]. The effect becomes problematic when the aerial manipulator requires close contact with the payload and the ground. This problem can become exacerbated in the vicinity of the payload, coined as the ’thrust stealing’ effect by Fishman et al., where the grasped object would block airflow [Fishman et al., 2021]. The following section provides an analysis of the different techniques proposed to solve these issues, illustrated in Figure 7. Many research articles published result from participating in competitions, such as the Mohamed Bin Zayed International Robotics Challenge171717www.mbzirc.com (MBZIRC). Work from this challenge has been mentioned within the section.

[Gomez-Tamm et al., 2020]


[Kessens et al., 2016]
4.1 Discussion
Table LABEL:tab:endeffectors_problems lists all of the open problems and recommended state-of-the-art solutions found throughout the section.
Disturbances such as wind and faulty grasping or components mid-flight can lead to centre of mass offsets. Furthermore, properties of the payload including non-uniformity, can also lead to this issue. Due to the private nature of package delivery, the UAV has no understanding of the material within the package, which could be non-uniform. Hence, estimating the payload parameters and incorporating these into an adaptive controller is essential for robust grasping and transportation of the package. Haptic feedback may also be required to validate the secure attachment of the payload. These feedback signals can aid with fault detection or attachment issues mid-flight.
Additionally, gripper compliance and haptic feedback can be used synonymously to reduce the damage done to the payload during gripping. Soft-tissue-based grippers provide compliance to objects, allowing for easy adaptability. They exhibit high structural compliance, which enables them to be used with unknown geometric packages with minimal control complexity. However, the non-linear response when actuating the gripper results in difficulty controlling the gripper motion. Haptic feedback can be used to obtain the desired force requirement and enable non-compliant grippers to grasp fragile payloads carefully. This control technique adds additional complexity to the system and requires additional computation compared to soft-tissue manipulators.
To improve package delivery speed, UAVs can grasp payloads while moving through a technique known as dynamic grasping. This technique dramatically reduces the flight time and can be incorporated into routing problems as a constraint to optimisation problems.
5 Autonomous Landing
The studies of aerial vehicle landing have potential benefits for package delivery. Autonomously landing on static targets allows package delivery at a customer’s doorstep. Furthermore, landing on dynamic ground targets enables truck collaboration [Ham, 2018], where a battery can be charged or replaced [Mourgelas et al., 2020] and restocking of a payload. This section outlines studies within the area of landing a UAV on a static or dynamic Unmanned Ground Vehicle (UGV) target. Furthermore, the design of mechanical landing aids such as novel shock-absorbing legs is discussed.
5.1 Discussion
Table LABEL:tab:landing lists all of the open problems and recommended state-of-the-art solutions found throughout the section.
Computer vision techniques have been used more recently to detect the landing zone. Other methods like infra-red have shown to be useful for perception tasks, such as detecting aircraft and communicating their relative position to the landing strip. Different approaches such as motion capture are redundant outside of laboratory conditions and GPS, where signals are not always obtainable nor accurate enough. Methods for landing on a dynamic platform can aid drone-truck operations for package delivery, and perching produces a novel approach to landing rather than on a flat surface.
For dynamic platforms, the poor precision of the relative motion between the UAV and UGV can lead to inaccurate landing. Feature point matching calculates the difference between two consecutive frames. This technique does not require knowledge of the ground robot but is less robust than using the ground robot’s dynamic model. Furthermore, researchers have investigated the effect of unknown disturbances on landing and controllers to mitigate this.
Soft-based grippers can also be used as a landing aid. Typically rigid linked landing gears provide little to no force reduction. Whereas passive and actuation-based landing gears reduce the impact force when landing. Soft-based grippers can also be used as a landing aid which has been discussed in the previous section. Passive actuated utilizes forces to actuate the mechanism. These mechanisms tend to be lighter and better able to land on curved surfaces, such as the Sarrus linkage. Actuation-based landing gears can be used to traverse hazardous terrain. However, they can block sensor view and typically require actuators which add to the weight constraint.
6 Safe Transit
The increase in the number of UAV operations leads to an increased risk of accidents caused by these aircraft. Unauthorised flights over densely populated areas can risk injuries, and furthermore, flights near airports can disrupt normal operations. Mid-air incidents can also be caused by malfunctions or pilot error which can lead to personal or property damage. Hence, researchers are working towards ’equivalent sense-and-avoid’ capabilities for UAVs. This would enable safe integration of UAVs into the airspace which is shared by remotely piloted and manned aircraft.
In the context of delivery UAVs, the last stage of the ’last-mile’ delivery package pipeline is known as the ’last-centimetre problem’ [Frachtenberg, 2019]. This encapsulates the navigation problem of reaching a precise final destination. This challenge ensures the safety of people and property while overcoming obstacles such as uneven terrain, stairs, pets and foliage. Both the last-mile and last-centimeter challenges require intelligent decision making from the autonomous vehicle to prevent collisions. Perception and state-estimation techniques need to be able to deal with noisy environments to extract as much accurate information as possible, especially on an unstable aerial platform. Planning algorithms need to be able to accommodate incomplete perception information while also being computationally simple. Control systems ensure planning algorithms can be completed as optimally as possible while operating the aerial manipulation system. The reader should refer to Sections 3 and 4 on aerial manipulation and grasping for this.
This section outlines the potential hazards that a delivery UAV may face. First, simulating frameworks are discussed, and then risk factors generated from non-ideal weather conditions is listed. State estimation techniques are evaluated, which estimate the vehicle’s exact or relative position and orientation. Hazard detection is briefly discussed, outlying potential methods UAVs can use in transit to detect uncooperative obstacles.
6.1 Discussion
Table LABEL:tab:SafeTransitProblems lists all of the open problems and recommended state-of-the-art solutions found throughout the section.
Weather conditions can significantly affect the battery life and component’s durability. As a result, researchers have been able to list the conditions which have the greatest effect. Furthermore, software frameworks can be used along global planners that analyses weather data for safe autonomous flight.
Safe flight also involves avoiding obstacles. As was shown through Carrio’s study, simple depth discontinuities can be used for obstacle detection. Alternatively, detecting other points of interest, such as power lines or other UAVs, can be done through special object detectors and neural network based approaches such as YOLO. Object detectors typically are trained on a dataset of prior known objects. Therefore, these algorithms don’t work well for unknown objects. A combination of unknown and known obstacle detection algorithms would provide an overall better collision detection system. However, due to the computational limitations of UAVs, this may reduce the object detection sampling rate. Alternatively, detecting the payload is an essential task before package delivery can commence. Different methods including vision, force sensors, and inertia measurements can all be used to obtain the pose and swing angle of the payload.
Another issue is the unknown landing environment for the aerial delivery vehicle. Hence there is variability in the number of features for localisation and mapping algorithms. Adaptive feedback methods which can switch between features and either laser scan matching or pixel matching can enable navigation in different environments. However, this also leads to varying standard operating conditions since pixel and scan matching are more computationally complex.
Furthermore, cooperative collision avoidance techniques can further aid in the safety of the UAV and other surrounding vehicles. ADS-B is widely used, and some organisations mandate that vehicles contain an ADS-B transmitter. It can transmit vehicle positional information to surrounding aerial vehicles. This data sharing technique has its flaws. Denial of service attacks, spoofing, and overcrowding can lead to malfunction. Unmanned traffic management systems provide a more scalable approach. Traffic management systems can be combined with ADS-B systems, which send telemetry data to a service provider.
Once an obstacle is detected through the means outlined above, a local path is required to avoid a collision. This path deviates from the global path in an unknown environment. SLAM algorithms or sensory information can aid the vehicle in partially understanding the environment. Then sampling-based, search-based, or potential field methods can be used to generate this path. Search-based methods provide optimal solutions but don’t scale well. Hence, sampling-based methods have been used along with artificial potential field methods due to their efficiency in generating a path albeit suboptimal. Once a navigation plan is constructued, payload specific constraints can be used to optimise the path. Generating what is known as a trajectory which can be more effective. Model predictive controllers can account for future behaviours of the aerial vehicle and payload using dynamic models. However, in instances of payload pose uncertainty PID controllers can be better suited, especially in turbulent environment conditions.
7 The Drone Routing Problem
Deployment of delivery unmanned aerial vehicles can be used in a wide range of applications of which Frachtenberg discusses [Frachtenberg, 2019]. Different traffic models can be used, merchandise delivery routes from a warehouse to the consumer whereas courier based models deliver between two private parties. Alternatively, the authors also describe how food delivery and humanitarian aid is well suited for unmanned aerial delivery due to the time sensitivity. Routing problems formulate this problem and use constraints of the vehicle to provide a feasible global path. The constraints found in the literature and discussed bellow are shown in Table LABEL:tab:RoutingConstraints
Routing problems are formulated typically as a graph, where a node represents a geographical locus and the arc is the road or path that joins the nodes together. Software libraries exist, such as OR-tools181818https://developers.google.com/optimization, which aid researchers tackle optimization problems such as vehicle routing. Many routing problems exist for many types of vehicles, such as the green vehicle routing problem [Erdoğan and Miller-Hooks, 2012] which accounts for battery-powered vehicles. However, these formulations are not catered toward the limitations of aerial vehicles such as the limited payload and range capacity. Both [Chung et al., 2020] and [Macrina et al., 2020] focus on routing problems for UAV delivery routing, taking into consideration constraints such as limited battery power and range. They classify UAV delivery routing problems into two categories. These two categories are routing problems where both trucks and drones or only drones perform the delivery. This is also known as drone-truck combined operations (DTCO) or drone operations (DO) respectively. Throughout this paper, the term UAV has been used throughout. However, to stay consistent with the literature, DO and DTCO is employed. Combined UAV and truck operations are considered due to their opposing features for speed, weight, capacity and range [Agatz et al., 2018] and hence can gain complimentary features.
Alternatively, [Chung et al., 2020] breaks the two routing problems (DO and DTCO) into topics, or problem specifics. This includes routing for: a set of locations, area coverage, search operations, scheduling for DO, task assignment and others. This section brings to light the popular studies outlined in Chung and Marina’s studies while also providing context of the technical methods which enable package delivery. The hope is to introduce new constraints within the optimization problem which then provides a more accurate route for the delivery UAV to follow.
7.1 Drone Operations
Drone operations consider the UAV constraints when generating a globally optimal route. Early optimization problems for UAV delivery are considered to be variants of the traveling salesman problem and vehicle routing problem [Toth and Vigo, 2002]. More recently, a high degree of attention has been committed to UAV characteristics which consider the physical constraints of the vehicle. Constraints such as flight time, speed, range and payload weight have been considered such as in [San et al., 2016, Tseng et al., 2022]. This also includes energy consumption and battery capacity models which can therefore estimate the flying range. Jeong et al. investigated the practical limitations of UAVs by taking into account the effect of the parcel weight on UAV’s energy consumption and restricted flying areas [Jeong et al., 2019]. Yu et al. presents a variant of the travelling salesman problem which calculates the order to visit charging stations which can then be used to find the optimal locations to place the charging stations [Yu et al., 2018a]. Another physical constraint of the UAV is the limited turning radius. Pěnička et al. address this issue by employing a Dubin Orientation Problem [Penicka et al., 2017]. This involves selecting the sequence of most valuable nodes and involving the vehicle’s heading angle at each target location.
Optimizing the TSP with refuelling (TSPWR) has been extensively investigated [Ottoni et al., 2022, Jeong and Illades Boy, 2018, Suzuki and Lan, 2018]. More specifically researchers have also investigated optimising for persistent drone operations. This could include scheduling UAVs for maintenance or recharging such as from the paper by Kim et al. [Kim et al., 2013]. They present a mixed integer linear programming model and the genetic algorithm to schedule a system of UAVs for refuelling at distant locations. Mission trajectories are generated which must be followed by at least one UAV. This trajectory can be given away in order for the UAV to refuel. Their model allows for long-term missions to be uninterrupted from the fuel constraints of UAVs.
Heuristic algorithms have recently become popular, compared to exact algorithms using integer programming formulations. One such popular heuristic algorithm is deep reinforcement learning which is powerful for solving various types of combinatorial optimization problems [Zhang et al., 2020]. Currently, most of the problems being solved are simplistic in nature and only recent works have shown the implementation of feasibility constraints [Ma et al., 2019].
7.2 Drone-Truck Combined Operations
In comparison to drone operations, drone-truck combined operations consist of both drones and ground vehicles performing the delivery. Murray and Chu introduced a routing problem which combines two mathematical programming models aimed at optimal routing and scheduling of UAVs and trucks. This includes the flying sidekick (FSTSP) and parallel drone scheduling (PDSTSP) travelling salesman problem variants [Murray and Chu, 2015]. The FSTSP considers a set of customers who each must be served once by a truck or UAV operating in coordination with the truck. Some delivery requests may be infeasible for a UAV to deliver. This includes; the payload capacity, packages requiring a signature or an unsafe location for landing. This leads customers being served only by truck. The objective is to minimize the time to deliver all packages and to return both vehicles to the depot. There are operating conditions assumed for this problem. First, the truck can visit multiple nodes while the UAV is in flight. Vehicles must visit only customer nodes as well as the depot and they are not permitted to visit the same node twice. Furthermore, the UAV is not permitted to visit multiple nodes while the truck is in transit. The UAV is assumed to remain in the air except to deliver a package, it cannot temporarily land while on route to conserve battery power. The UAV cannot rendezvous with the truck at an intermediate location, it must be at the location of a node. The UAV may also not be re-launched from the depot if the route ends at that node as there is no need to rendezvous with the truck. Murray extended their FSTSP formulation with the mFSTSP, incorporating multiple UAVs [Murray, 2020]. The authors noticed, that adding more UAVs to an existing fleet showed diminishing marginal improvements for large-scale operations. A further formulation of this is to include delivery within a time window with an intermittent connectivity network and the possibility of rechargeability on route. Khoufi et al. solves this [Khoufi et al., 2021] using a Non-dominated Sorting Genetic Algorithm II [Deb et al., 2002] (NSGA-II). This algorithm is based on Pareto dominance where single optimization local search is not easily implemented. One notable algorithm is the Multiobjective Evolutionary Algorithm based on Decomposition with local search, which was shown to perform better than (NSGA-II) for the multiobjective TSP [Peng et al., 2009].
Alternatively to the travelling salesman problem, Wang et al. introduces the vehicle routing problem with drones (VRP-D) [Wang et al., 2017]. The vehicle routing problem generalises the travelling salesman problem by trying to solve the optimal set of routes for a fleet of vehicles to traverse. The study consists of multiple trucks, each carrying one or more UAVs which, when launched, must rendezvous with the same truck. The objective is to minimize the route time. The authors find, from their analysis of the worst case scenario, that the most significant parameters are the number of UAVs per truck and the relative speed of the UAV.
The FSTSP is feasible when distribution centres are relatively far from the customer location and a UAV is able to operate synchronously with a truck. However, when a high proportion of customers are within a UAVs flight range from the distribution centre the parallel drone scheduling travelling salesman problem (PDSTSP) is more appropriate. The PDSTSP formulates that a single depot exists from which a single truck and fleet of UAVs departs and returns from. There is no synchronization between a UAV and a truck, compared to FSTSP in which the two vehicle types are synchronized. The objective for this problem is to minimize the latest time a vehicle returns to the depot, such that each node is visited once. Murray et al formulate both the FSTSP AND PDSTSP as a mixed integer linear programming problems and the Gurobi solver is used [Murray and Chu, 2015]. Ham extends the PDSTSP by considering two different types of drone tasks: drop and pickup [Ham, 2018]. Once the UAV has delivered the payload, the UAV has the option to fly back to the depot or fly directly to another node to pick up a package.
7.3 Specific Applications
Rather than topic areas, the research can also be broken down into specific application of routing problems. One such topic is the facility location problem. Hong et al. use the simulated annealing heuristic to optimise the location of recharging stations for delivery UAVs [Hong et al., 2017]. Their study ensures the construction of a feasible delivery network which connects the stations and covers demand. Alternatively, Golabi and Shavarani use the genetic algorithm heuristic to optimise the facility location problem for emergency operations [Golabi et al., 2017]. There has been significant work to investigate efficient air transportation for the anticipation of highly congested airspace, from UAVs flying simultaneously. Chen et al. propose a method of generating the optimal platoons for UAVs flying withing air highways. Their study aims to impose an airspace structure to reduce congestion [Chen et al., 2017]. Finally, there has been literature exploring routing problems for medical applications such as the comparison between a UAV and emergency medical services for out-of-hospital cardiac arrests [Claesson et al., 2017]. Haidari et al. perform a sensitivity analyses to asses the impact of using UAVs for routine vaccine distribution under various circumstances ranging from geography, population, road conditions and vaccine schedules compared to traditional multi-tiered land transport systems [Haidari et al., 2016]. Their analysis found improved logistic cost savings and vaccine availability through the use of UAVs for low and middle income countries compared to traditional methods.
8 Discussion and Future Directions
Delivery unmanned aerial vehicles have the potential to improve upon the logistics of package delivery. In this paper, we analyse the technical problems at each stage of the pipeline with the accompanying state-of-the-art recommendations. Additionally, we compare the solutions against design, environmental and legal constraints. All of these problems are outlined in Table LABEL:tab:conclusion
Aerial Manipulation: Different manipulator designs have been identified, which include: rigid linked, cable, continuum, foldable, hydraulic, and ejection. These designs provide contrasting advantages and disadvantages. One major issue with aerial manipulation relates to the coupling effect experienced when operating a package. Centralised and decentralised methods deal with the disturbances, caused when operating the manipulator, differently. Specifically for cable-based controllers, cable tension must be accounted for to generate smooth or aggressive trajectories. Additionally, calculating the tension within the cable is still an open research question due to the difficulty in modelling the kinematics of the cable attached to the UAV.
Aerial Grasping: Additionally, different end-effector designs have been identified, comprising ingressive, magnetic, tendon, and vacuum-based. Center of mass misalignment can occur due to errors when gripping the payload. Stability can be compromised if not this is not incorporated into the control system through an adaptive mechanism. Furthermore, the centre of mass won’t always alight with the centre of geometry. The contents of the package are not known a priori, which can lead to non-uniformity. Damage to the payload can be prevented through haptic feedback and gripper compliance using soft-tissue-based materials. Dynamic grasping can also be utilised to improve the efficiency of the logistic operation by grasping the object mid-flight.
Autonomous Landing: Before a package can be delivered, the target zone must first be located. More recently, this has been done using computer vision and machine learning techniques. However, alternative techniques exist, such as GPS based. Nevertheless, GPS-based methods are not suitable for dynamic platforms due to inaccurate measurements. Landing on dynamic platforms is advantageous for truck and UAV collaborative operations. Detecting the relative motion between the two vehicles is crucial. The delayed control response and poor precision of the relative motion makes this problem extremely difficult. Researchers are either able to use pure computer vision techniques or build a dynamic model of the ground vehicle to calculate the relative motion. Finally, researchers have investigated reducing the impact force caused when landing through passive and active landing gears.
Safe Transit: Environmental conditions have an impact on component health, battery life, and flight performance. Software can aid with the analysis of weather data and forecasting for safe flight. When landing, the UAV is exploring an unknown and potential GPS-denied environment. This can lead to difficulties observing features for localisation and obstacle detection. Cooperative vehicles, on the other hand, can utilise radar to broadcast positional information to surrounding vehicles using automatic dependent surveillance broadcast systems. In spite of this, broadcasting systems have security flaws such as denial of service attacks and spoofing. Unmanned traffic management systems provide a solution to these attacks while also being scalable for autonomous flight, which is crucial for autonomous package delivery.
Routing: Routing problems can be classified into either drone or drone-truck combined operations. Furthermore, depending on the location of the depot, drone-truck combined operations can be further classified into flying sidekick or parallel operations. Flying sidekick based operations result in the truck and UAV working in tandem. Whereas, no cooperative behaviour occurs in parallel operations. Researchers found the latter to be more optimal when the target location was within the UAV’s flight range of the depot. Different constraints can be incorporated into the optimisation problem which includes design, operational and legal constraints.
Design, Environmental, and Legal Constraints: Aviation regulatory bodies establish national and international standards and regulations to ensure safe and efficient use of the airspace. These heavily impact the logistic operations of unmanned package aerial vehicles. Regulations on autonomous flight are heavily limited, requiring special licences to fly. However, regulations on piloted flights are currently more flexible. These regulations consist of operational constraints influenced by: privacy, security, safety, and environmental impacts. Operational constraints consist of vertical height limitations and critical separation distances from secure locations such as airports and military bases. Furthermore, certain technical capabilities may be required, such as the ADS-B out transmitters. Privacy issues arise when the delivery UAV needs to land on private property. Developers need to adhere to a privacy-by-design philosophy to ensure protection of personal data. Classification algorithms can capture personal belongings and identifiable human features, which can be intrusive. Furthermore, lost packages can lead to personal information and, in the worst-case scenario, identity theft. Addressing privacy issues, along with provable reliability of the system, will help to increase public trust of delivery UAVs. An equivalent level of safety of manned aerial vehicles is required for the safe integration of autonomous delivery UAVs, which is currently an open research area. Hazard assessment, identifying the major risks of delivery UAVs, would also provide benefits to insurance companies. These hazards would include take-off and landing in unknown environments and aerial manipulation of the package. To provide a complete insurance policy, insurance companies need to understand all the parameters that influence these risks. This includes: legality, operational use, training and experience with a list of human factors, system reliability, and system or package value. Finally, environmental factors consist of noise pollution, aesthetic impact and effects on wildlife. Researchers have shown noise from UAVs is considerably more irritating than road traffic.
Future Trends: Organisations attempting to break into the autonomous aerial package delivery space will struggle to ‘lift-off’ due to restrictive legislative constraints and design problems. Cable-based manipulators show promise due to the ability to deliver a package without landing and lowering the payload to the target area. This payload delivery mechanism has been therefore being used by Google Wing. This overcomes the privacy issue of landing within the curtilage of private property. Furthermore, noise generated from the UAV is minimised as the separation distance is large. Alternatively, soft-based tendon grippers also serve as landing gears which reduces the force impact and can also utilise perching for UAV-truck collaborative operations. However, more research is required to reduce fatigue caused by consistent landing. Gripping-based methods need further work to better generalise to all packages. Ingressive and magnetic grippers require custom-designed packages. Furthermore, vacuum-based grippers are too susceptible to the environment due to pressure leakage. However, Soft-tendon-based grippers provide package compliance which shows promise. On the other hand, stability and control of gripping while ensuring a strong and reliable grip on the package is a challenge. Finally, the use of unmanned traffic management systems will be utilised to cooperative identify other unmanned aerial vehicles, while equivalent sense and avoid capabilities will loosen regulation and enable safe integration into the airspace.
9 Acknowledgement
This work is supported by the UKRI Centre for Doctoral Training in Accountable, Responsible & Transparent AI (ART-AI), under UKRI grant number EP/S023437/1. The authors would like to thank the ART-AI center for their support and the editor and anonymous reviewers for their constructive comments. The authors would also like to thank Henry Ball for his assistance with graphics used in this paper.
References
- [Acevedo et al., 2018] Acevedo, J. J., García, M., Viguria, A., Ramón, P., Arrue, B. C., and Ollero, A. (2018). Autonomous Landing of a Multicopter on a Moving Platform Based on Vision Techniques. In Ollero, A., Sanfeliu, A., Montano, L., Lau, N., and Cardeira, C., editors, ROBOT 2017: Third Iberian Robotics Conference, volume 694, pages 272–282. Springer International Publishing, Cham. Series Title: Advances in Intelligent Systems and Computing.
- [Adão et al., 2017] Adão, T., Hruška, J., Pádua, L., Bessa, J., Peres, E., Morais, R., and Sousa, J. J. (2017). Hyperspectral Imaging: A Review on UAV-Based Sensors, Data Processing and Applications for Agriculture and Forestry. Remote Sensing, 9(11):1110.
- [Agatz et al., 2018] Agatz, N., Bouman, P., and Schmidt, M. (2018). Optimization Approaches for the Traveling Salesman Problem with Drone. Transportation Science, 52(4):965–981.
- [Al-Emadi et al., 2021] Al-Emadi, S., Al-Ali, A., and Al-Ali, A. (2021). Audio-Based Drone Detection and Identification Using Deep Learning Techniques with Dataset Enhancement through Generative Adversarial Networks. Sensors, 21(15):4953.
- [Amicone et al., 2021] Amicone, D., Cannas, A., Marci, A., and Tortora, G. (2021). A Smart Capsule Equipped with Artificial Intelligence for Autonomous Delivery of Medical Material through Drones. Applied Sciences, 11(17):7976.
- [Andraši et al., 2017] Andraši, P., Radišić, T., Muštra, M., and Ivošević, J. (2017). Night-time Detection of UAVs using Thermal Infrared Camera. Transportation Research Procedia, 28:183–190.
- [Antonini et al., 2020] Antonini, A., Guerra, W., Murali, V., Sayre-McCord, T., and Karaman, S. (2020). The Blackbird UAV dataset. The International Journal of Robotics Research, 39(10-11):1346–1364.
- [Arteaga et al., 2018] Arteaga, R. A., Epperson, K., Dandachy, M., Aruljothi, A., Truong, H., and Vedantam, M. (2018). µADS-B Detect and Avoid Flight Tests on Phantom 4 Unmanned Aircraft System. In 2018 AIAA Information Systems-AIAA Infotech @ Aerospace, page 2014, Kissimmee, Florida. American Institute of Aeronautics and Astronautics.
- [Augugliaro et al., 2014] Augugliaro, F., Lupashin, S., Hamer, M., Male, C., Hehn, M., Mueller, M. W., Willmann, J. S., Gramazio, F., Kohler, M., and D’Andrea, R. (2014). The Flight Assembled Architecture installation: Cooperative construction with flying machines. IEEE Control Systems, 34(4):46–64.
- [Baca et al., 2019] Baca, T., Stepan, P., Spurny, V., Hert, D., Penicka, R., Saska, M., Thomas, J., Loianno, G., and Kumar, V. (2019). Autonomous landing on a moving vehicle with an unmanned aerial vehicle. Journal of Field Robotics, 36(5):874–891.
- [Backus et al., 2014] Backus, S. B., Odhner, L. U., and Dollar, A. M. (2014). Design of hands for aerial manipulation: Actuator number and routing for grasping and perching. In 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 34–40, Chicago, IL, USA. IEEE.
- [Bahnemann et al., 2017] Bahnemann, R., Schindler, D., Kamel, M., Siegwart, R., and Nieto, J. (2017). A decentralized multi-agent unmanned aerial system to search, pick up, and relocate objects. In 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), pages 123–128, Shanghai. IEEE.
- [Bailey et al., 2006] Bailey, T., Nieto, J., Guivant, J., Stevens, M., and Nebot, E. (2006). Consistency of the EKF-SLAM Algorithm. In 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 3562–3568, Beijing. IEEE.
- [Balamurugan et al., 2016] Balamurugan, G., Valarmathi, J., and Naidu, V. P. S. (2016). Survey on UAV navigation in GPS denied environments. In 2016 International Conference on Signal Processing, Communication, Power and Embedded System (SCOPES), pages 198–204, Paralakhemundi, Odisha, India. IEEE.
- [Bardow et al., 2016] Bardow, P., Davison, A. J., and Leutenegger, S. (2016). Simultaneous Optical Flow and Intensity Estimation from an Event Camera. In 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 884–892, Las Vegas, NV, USA. IEEE.
- [Barisic et al., 2022] Barisic, A., Petric, F., and Bogdan, S. (2022). Sim2Air - Synthetic Aerial Dataset for UAV Monitoring. IEEE Robotics and Automation Letters, 7(2):3757–3764.
- [Bartelds et al., 2016] Bartelds, T., Capra, A., Hamaza, S., Stramigioli, S., and Fumagalli, M. (2016). Compliant Aerial Manipulators: Toward a New Generation of Aerial Robotic Workers. IEEE Robotics and Automation Letters, 1(1):477–483.
- [Battiato et al., 2017] Battiato, S., Cantelli, L., D’Urso, F., Farinella, G. M., Guarnera, L., Guastella, D., Melita, C. D., Muscato, G., Ortis, A., Ragusa, F., and Santoro, C. (2017). A System for Autonomous Landing of a UAV on a Moving Vehicle. In Battiato, S., Gallo, G., Schettini, R., and Stanco, F., editors, Image Analysis and Processing - ICIAP 2017, pages 129–139. Springer International Publishing, Cham. Series Title: Lecture Notes in Computer Science.
- [Bellicoso et al., 2015] Bellicoso, C. D., Buonocore, L. R., Lippiello, V., and Siciliano, B. (2015). Design, modeling and control of a 5-DoF light-weight robot arm for aerial manipulation. In 2015 23rd Mediterranean Conference on Control and Automation (MED), pages 853–858, Torremolinos, Malaga, Spain. IEEE.
- [Bernard and Kondak, 2009] Bernard, M. and Kondak, K. (2009). Generic slung load transportation system using small size helicopters. In 2009 IEEE International Conference on Robotics and Automation, pages 3258–3264, Kobe. IEEE.
- [Berndt, 2004] Berndt, J. (2004). JSBSim: An Open Source Flight Dynamics Model in C++. In AIAA Modeling and Simulation Technologies Conference and Exhibit, Providence, Rhode Island. American Institute of Aeronautics and Astronautics.
- [Bertizzolo et al., 2021] Bertizzolo, L., Tran, T. X., Buczek, J., Balasubramanian, B., Jana, R., Zhou, Y., and Melodia, T. (2021). Streaming from the Air: Enabling Drone-sourced Video Streaming Applications on 5G Open-RAN Architectures. IEEE Transactions on Mobile Computing.
- [Beul et al., 2019] Beul, M., Nieuwenhuisen, M., Quenzel, J., Rosu, R. A., Horn, J., Pavlichenko, D., Houben, S., and Behnke, S. (2019). Team NimbRo at MBZIRC 2017: Fast landing on a moving target and treasure hunting with a team of micro aerial vehicles. Journal of Field Robotics, 36(1):204–229.
- [Bisgaard et al., 2007] Bisgaard, M., la Cour-Harbo, A., Johnson, E. N., and Bendtsen, J. D. (2007). Vision aided state estimator for helicopter slung load system. IFAC Proceedings Volumes, 40(7):425–430.
- [Bloesch et al., 2017] Bloesch, M., Burri, M., Omari, S., Hutter, M., and Siegwart, R. (2017). Iterated extended Kalman filter based visual-inertial odometry using direct photometric feedback. The International Journal of Robotics Research, 36(10):1053–1072.
- [Bloesch et al., 2018] Bloesch, M., Czarnowski, J., Clark, R., Leutenegger, S., and Davison, A. J. (2018). CodeSLAM - Learning a Compact, Optimisable Representation for Dense Visual SLAM. In 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 2560–2568, Salt Lake City, UT. IEEE.
- [Bock et al., 2020] Bock, J., Krajewski, R., Moers, T., Runde, S., Vater, L., and Eckstein, L. (2020). The inD Dataset: A Drone Dataset of Naturalistic Road User Trajectories at German Intersections. In Intelligent Vehicles Symposium (IV), pages 1929–1934, Las Vegas, NV, USA. IEEE.
- [Bodie et al., 2021] Bodie, K., Tognon, M., and Siegwart, R. (2021). Dynamic End Effector Tracking with an Omnidirectional Parallel Aerial Manipulator. IEEE Robotics and Automation Letters, 6(4):8165–8172.
- [Bonyan Khamseh et al., 2018] Bonyan Khamseh, H., Janabi-Sharifi, F., and Abdessameud, A. (2018). Aerial manipulation—A literature survey. Robotics and Autonomous Systems, 107:221–235.
- [Boysen et al., 2021] Boysen, N., Fedtke, S., and Schwerdfeger, S. (2021). Last-mile delivery concepts: a survey from an operational research perspective. OR Spectrum, 43(1):1–58.
- [Bresson et al., 2017] Bresson, G., Alsayed, Z., Yu, L., and Glaser, S. (2017). Simultaneous Localization and Mapping: A Survey of Current Trends in Autonomous Driving. IEEE Transactions on Intelligent Vehicles, 2(3):194–220.
- [Brunet et al., 2020] Brunet, M. N., Ribeiro, G. A., Mahmoudian, N., and Rastgaar, M. (2020). Stereo Vision for Unmanned Aerial VehicleDetection, Tracking, and Motion Control. arXiv:2005.04183 [cs, eess]. arXiv: 2005.04183.
- [Burgner-Kahrs et al., 2015] Burgner-Kahrs, J., Rucker, D. C., and Choset, H. (2015). Continuum Robots for Medical Applications: A Survey. IEEE Transactions on Robotics, 31(6):1261–1280.
- [Burke et al., 2019] Burke, C., Nguyen, H., Magilligan, M., and Noorani, R. (2019). Study of A Drone’s Payload Delivery Capabilities Utilizing Rotational Movement. In International Conference on Robotics, Electrical and Signal Processing Techniques (ICREST), pages 672–675, Dhaka, Bangladesh. IEEE.
- [Burri et al., 2016] Burri, M., Nikolic, J., Gohl, P., Schneider, T., Rehder, J., Omari, S., Achtelik, M. W., and Siegwart, R. (2016). The EuRoC micro aerial vehicle datasets. The International Journal of Robotics Research, 35(10):1157–1163.
- [Cadena et al., 2016] Cadena, C., Carlone, L., Carrillo, H., Latif, Y., Scaramuzza, D., Neira, J., Reid, I., and Leonard, J. J. (2016). Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-Perception Age. IEEE Transactions on Robotics, 32(6):1309–1332.
- [Cantelli et al., 2017] Cantelli, L., Guastella, D., Melita, C., Muscato, G., Battiato, S., D’Urso, F., Farinella, G., Ortis, A., and Santoro, C. (2017). Autonomous landing of a UAV on a moving vehicle for the MBZIRC. In CLAWAR 2017: 20th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, pages 197–204, Porto, Portugal.
- [Carramiñana et al., 2021] Carramiñana, D., Campaña, I., Bergesio, L., Bernardos, A. M., and Besada, J. A. (2021). Sensors and Communication Simulation for Unmanned Traffic Management. Sensors, 21(3):927.
- [Carrio et al., 2018] Carrio, A., Vemprala, S., Ripoll, A., Saripalli, S., and Campoy, P. (2018). Drone Detection Using Depth Maps. In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 1034–1037, Madrid. IEEE.
- [Cetinsoy et al., 2012] Cetinsoy, E., Dikyar, S., Hancer, C., Oner, K., Sirimoglu, E., Unel, M., and Aksit, M. (2012). Design and construction of a novel quad tilt-wing UAV. Mechatronics, 22(6):723–745.
- [Chaikalis et al., 2020] Chaikalis, D., Khorrami, F., and Tzes, A. (2020). Adaptive Control Approaches for an Unmanned Aerial Manipulation System. In International Conference on Unmanned Aircraft Systems (ICUAS), page 6, Athens, Greece. IEEE.
- [Chen et al., 2020a] Chen, C., Wang, B., Lu, C. X., Trigoni, N., and Markham, A. (2020a). A Survey on Deep Learning for Localization and Mapping: Towards the Age of Spatial Machine Intelligence. arXiv:2006.12567 [cs, eess]. arXiv: 2006.12567.
- [Chen et al., 2020b] Chen, F., Martin, J. D., Huang, Y., Wang, J., and Englot, B. (2020b). Autonomous Exploration Under Uncertainty via Deep Reinforcement Learning on Graphs. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA. IEEE.
- [Chen et al., 2017] Chen, M., Hu, Q., Fisac, J., Akametalu, K., Mackin, C., and Tomlin, C. (2017). Reachability-Based Safety and Goal Satisfaction of Unmanned Aerial Platoons on Air Highways. Journal of Guidance, Control, and Dynamics, 40(6):1360–1373.
- [Chen and Jia, 2020] Chen, Z. and Jia, H. (2020). Design of Flight Control System for a Novel Tilt-Rotor UAV. Complexity, 2020:1–14.
- [Cherubini et al., 2015] Cherubini, A., Moretti, G., Vertechy, R., and Fontana, M. (2015). Experimental characterization of thermally-activated artificial muscles based on coiled nylon fishing lines. AIP Advances, 5(6).
- [Chow et al., 2019] Chow, J. F., Kocer, B. B., Henawy, J., Seet, G., Li, Z., Yau, W. Y., and Pratama, M. (2019). Toward Underground Localization: Lidar Inertial Odometry Enabled Aerial Robot Navigation. arXiv:1910.13085 [cs, eess]. arXiv: 1910.13085.
- [Christian and Cabell, 2017] Christian, A. W. and Cabell, R. (2017). Initial Investigation into the Psychoacoustic Properties of Small Unmanned Aerial System Noise. In 23rd AIAA/CEAS Aeroacoustics Conference, Denver, Colorado. American Institute of Aeronautics and Astronautics.
- [Chudoba et al., 2016] Chudoba, J., Kulich, M., Saska, M., Báča, T., and Přeučil, L. (2016). Exploration and Mapping Technique Suited for Visual-features Based Localization of MAVs. Journal of Intelligent & Robotic Systems, 84(1-4):351–369.
- [Chung et al., 2020] Chung, S. H., Sah, B., and Lee, J. (2020). Optimization for drone and drone-truck combined operations: A review of the state of the art and future directions. Computers & Operations Research, 123:105004.
- [Chung et al., 2018] Chung, S.-J., Paranjape, A. A., Dames, P., Shen, S., and Kumar, V. (2018). A Survey on Aerial Swarm Robotics. IEEE Transactions on Robotics, 34(4):837–855.
- [Claesson et al., 2017] Claesson, A., Bäckman, A., Ringh, M., Svensson, L., Nordberg, P., Djärv, T., and Hollenberg, J. (2017). Time to Delivery of an Automated External Defibrillator Using a Drone for Simulated Out-of-Hospital Cardiac Arrests vs Emergency Medical Services. JAMA, 317(22):2332–2334.
- [Cokyasar, 2021] Cokyasar, T. (2021). Optimization of battery swapping infrastructure for e-commerce drone delivery. Computer Communications, 168:146–154.
- [Cosyn and Vierendeels, 2007] Cosyn, P. and Vierendeels, J. (2007). Design of fixed wing micro air vehicles. The Aeronautical Journal, 111(1119):315–326.
- [Cruz and Fierro, 2017] Cruz, P. J. and Fierro, R. (2017). Cable-suspended load lifting by a quadrotor UAV: hybrid model, trajectory generation, and control. Autonomous Robots, 41(8):1629–1643.
- [Culley et al., 2020] Culley, J., Garlick, S., Gil Esteller, E., Georgiev, P., Fursa, I., Vander Sluis, I., Ball, P., and Bradley, A. (2020). System Design for a Driverless Autonomous Racing Vehicle. In 2020 12th International Symposium on Communication Systems, Networks and Digital Signal Processing (CSNDSP), pages 1–6, Porto, Portugal. IEEE.
- [Danko et al., 2015] Danko, T. W., Chaney, K. P., and Oh, P. Y. (2015). A parallel manipulator for mobile manipulating UAVs. In 2015 IEEE International Conference on Technologies for Practical Robot Applications (TePRA), pages 1–6, Woburn, MA, USA. IEEE.
- [Davidson et al., 2016] Davidson, D., Wu, H., and Jellinek, R. (2016). Controlling UAVs with Sensor Input Spoofing Attacks. In 10th USENIX workshop on offensive technologies (WOOT 16), Austin, TX, USA.
- [Davies et al., 2018] Davies, L., Bolam, R. C., Vagapov, Y., and Anuchin, A. (2018). Review of Unmanned Aircraft System Technologies to Enable Beyond Visual Line of Sight (BVLOS) Operations. In 2018 X International Conference on Electrical Power Drive Systems (ICEPDS), pages 1–6, Novocherkassk. IEEE.
- [Davison et al., 2007] Davison, A. J., Reid, I. D., Molton, N. D., and Stasse, O. (2007). MonoSLAM: Real-Time Single Camera SLAM. IEEE Transactions on Pattern Analysis and Machine Intelligence, 29(6):1052–1067.
- [de Angelis, 2019] de Angelis, E. L. (2019). Swing angle estimation for multicopter slung load applications. Aerospace Science and Technology, 89:264–274.
- [de Haag et al., 2016] de Haag, M. U., Bartone, C. G., and Braasch, M. S. (2016). Flight-test evaluation of small form-factor LiDAR and radar sensors for sUAS detect-and-avoid applications. In 2016 IEEE/AIAA 35th Digital Avionics Systems Conference (DASC), pages 1–11, Sacramento, CA, USA. IEEE.
- [de Marina and Smeur, 2019] de Marina, H. G. and Smeur, E. (2019). Flexible collaborative transportation by a team of rotorcraft. In International Conference on Robotics and Automation (ICRA), Montreal, Canada. IEEE.
- [Deb et al., 2002] Deb, K., Pratap, A., Agarwal, S., and Meyarivan, T. (2002). A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Transactions on Evolutionary Computation, 6(2):182–197.
- [Demiane et al., 2020] Demiane, F., Sharafeddine, S., and Farhat, O. (2020). An optimized UAV trajectory planning for localization in disaster scenarios. Computer Networks, 179:107378.
- [Deng et al., 2020] Deng, S., Wang, S., and Zhang, Z. (2020). Aerodynamic performance assessment of a ducted fan UAV for VTOL applications. Aerospace Science and Technology, 103:105895.
- [Dietsche et al., 2021] Dietsche, A., Cioffi, G., Hidalgo-Carrio, J., and Scaramuzza, D. (2021). Powerline Tracking with Event Cameras. In International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic. IEEE.
- [Ding et al., 2022] Ding, G., Berke, A., Degue, K. H., Balakrishnan, H., Gopalakrishnan, K., and Li, M. Z. (2022). Routing with Privacy for Drone Package Delivery Systems. In International Conference on Research in Air Transportation, page 8, Tampa, Florida, USA.
- [Dong et al., 2018] Dong, Y., Camci, E., and Kayacan, E. (2018). Faster RRT-based Nonholonomic Path Planning in 2D Building Environments Using Skeleton-constrained Path Biasing. Journal of Intelligent & Robotic Systems, 89(3-4):387–401.
- [Dong et al., 2017] Dong, Y., Zhang, Y., and Ai, J. (2017). Experimental Test of Unmanned Ground Vehicle Delivering Goods Using RRT Path Planning Algorithm. Unmanned Systems, 05(01):45–57.
- [Drozdowicz et al., 2016] Drozdowicz, J., Wielgo, M., Samczynski, P., Kulpa, K., Krzonkalla, J., Mordzonek, M., Bryl, M., and Jakielaszek, Z. (2016). 35 GHz FMCW drone detection system. In 2016 17th International Radar Symposium (IRS), pages 1–4, Krakow, Poland. IEEE.
- [Eller et al., 2019] Eller, L., Guerin, T., Huang, B., Warren, G., Yang, S., Roy, J., and Tellex, S. (2019). Advanced Autonomy on a Low-Cost Educational Drone Platform. In 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 1032–1039, Macau, China. IEEE.
- [Erdoğan and Miller-Hooks, 2012] Erdoğan, S. and Miller-Hooks, E. (2012). A Green Vehicle Routing Problem. Transportation Research Part E: Logistics and Transportation Review, 48(1):100–114.
- [Faessler et al., 2018] Faessler, M., Franchi, A., and Scaramuzza, D. (2018). Differential Flatness of Quadrotor Dynamics Subject to Rotor Drag for Accurate Tracking of High-Speed Trajectories. IEEE Robotics and Automation Letters, 3(2):620–626.
- [Falanga et al., 2020] Falanga, D., Kleber, K., and Scaramuzza, D. (2020). Dynamic obstacle avoidance for quadrotors with event cameras. Science Robotics, 5(40).
- [Falanga et al., 2017] Falanga, D., Zanchettin, A., Simovic, A., Delmerico, J., and Scaramuzza, D. (2017). Vision-based autonomous quadrotor landing on a moving platform. In 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), pages 200–207, Shanghai, China. IEEE.
- [Farrow and Correll, 2015] Farrow, N. and Correll, N. (2015). A soft pneumatic actuator that can sense grasp and touch. In 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 2317–2323, Hamburg, Germany. IEEE.
- [Faust et al., 2017] Faust, A., Palunko, I., Cruz, P., Fierro, R., and Tapia, L. (2017). Automated aerial suspended cargo delivery through reinforcement learning. Artificial Intelligence, 247:381–398.
- [Feng et al., 2017] Feng, J., Zhang, C., Sun, B., and Song, Y. (2017). A fusion algorithm of visual odometry based on feature-based method and direct method. In 2017 Chinese Automation Congress (CAC), pages 1854–1859, Jinan. IEEE.
- [Fiaz et al., 2018] Fiaz, U. A., Abdelkader, M., and Shamma, J. S. (2018). An Intelligent Gripper Design for Autonomous Aerial Transport with Passive Magnetic Grasping and Dual-Impulsive Release. In 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), pages 1027–1032, Auckland. IEEE.
- [Fiaz et al., 2017] Fiaz, U. A., Toumi, N., and Shamma, J. S. (2017). Passive Aerial Grasping of Ferrous Objects. IFAC-PapersOnLine, 50(1):10299–10304.
- [Fishman et al., 2021] Fishman, J., Ubellacker, S., Hughes, N., and Carlone, L. (2021). Dynamic Grasping with a ”Soft” Drone: From Theory to Practice. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 4214–4221, Prague, Czech Republic. IEEE.
- [Foehn et al., 2017] Foehn, P., Falanga, D., Kuppuswamy, N., Tedrake, R., and Scaramuzza, D. (2017). Fast Trajectory Optimization for Agile Quadrotor Maneuvers with a Cable-Suspended Payload. In Robotics: Science and Systems XIII. Robotics: Science and Systems Foundation.
- [Fonder and Van Droogenbroeck, 2019] Fonder, M. and Van Droogenbroeck, M. (2019). Mid-Air: A Multi-Modal Dataset for Extremely Low Altitude Drone Flights. In Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), pages 553–562, Long Beach, CA, USA. IEEE.
- [Forster et al., 2014] Forster, C., Pizzoli, M., and Scaramuzza, D. (2014). SVO: Fast semi-direct monocular visual odometry. In 2014 IEEE International Conference on Robotics and Automation (ICRA), pages 15–22, Hong Kong, China. IEEE.
- [Frachtenberg, 2019] Frachtenberg, E. (2019). Practical Drone Delivery. Computer, 52(12):53–57.
- [Furrer et al., 2016] Furrer, F., Burri, M., Achtelik, M., and Siegwart, R. (2016). RotorS—A Modular Gazebo MAV Simulator Framework. In Koubaa, A., editor, Robot Operating System (ROS), volume 625, pages 595–625. Springer International Publishing, Cham. Series Title: Studies in Computational Intelligence.
- [Gallego et al., 2020] Gallego, G., Delbruck, T., Orchard, G. M., Bartolozzi, C., Taba, B., Censi, A., Leutenegger, S., Davison, A., Conradt, J., Daniilidis, K., and Scaramuzza, D. (2020). Event-based Vision: A Survey. IEEE Transactions on Pattern Analysis and Machine Intelligence, 44(1):154–180.
- [Garcia Rubiales et al., 2021] Garcia Rubiales, F. J., Ramon Soria, P., Arrue, B. C., and Ollero, A. (2021). Soft-Tentacle Gripper for Pipe Crawling to Inspect Industrial Facilities Using UAVs. Sensors, 21(12):4142.
- [Garimella et al., 2021] Garimella, G., Sheckells, M., Kim, S., Baraban, G., and Kobilarov, M. (2021). Improving the Reliability of Pick-and-Place With Aerial Vehicles Through Fault-Tolerant Software and a Custom Magnetic End-Effector. IEEE Robotics and Automation Letters, 6(4):7501–7508.
- [Gawel et al., 2017] Gawel, A., Kamel, M., Novkovic, T., Widauer, J., Schindler, D., von Altishofen, B. P., Siegwart, R., and Nieto, J. (2017). Aerial picking and delivery of magnetic objects with MAVs. In 2017 IEEE International Conference on Robotics and Automation (ICRA), pages 5746–5752, Singapore, Singapore. IEEE.
- [Golabi et al., 2017] Golabi, M., Shavarani, S. M., and Izbirak, G. (2017). An edge-based stochastic facility location problem in UAV-supported humanitarian relief logistics: a case study of Tehran earthquake. Natural Hazards, 87(3):1545–1565.
- [Gomez-Tamm et al., 2020] Gomez-Tamm, A. E., Ramon-Soria, P., Arrue, B. C., and Ollero, A. (2020). TCP Muscle Tensors: Theoretical Analysis and Potential Applications in Aerial Robotic Systems. In Silva, M. F., Luís Lima, J., Reis, L. P., Sanfeliu, A., and Tardioli, D., editors, Robot 2019: Fourth Iberian Robotics Conference, volume 1092, pages 40–51. Springer International Publishing, Cham.
- [Goodarzi et al., 2015] Goodarzi, F. A., Lee, D., and Lee, T. (2015). Geometric Adaptive Tracking Control of a Quadrotor UAV on SE(3) for Agile Maneuvers. Journal of Dynamic Systems, Measurement, and Control, 137(9):091007.
- [Gray and Weston, 2021] Gray, E. and Weston, M. A. (2021). Pilot perceptions of options to manage drone-wildlife interactions; associations with wildlife value orientations and connectedness to nature. Journal for Nature Conservation, 64:126090.
- [Gu et al., 2017] Gu, H., Lyu, X., Li, Z., Shen, S., and Zhang, F. (2017). Development and experimental verification of a hybrid vertical take-off and landing (VTOL) unmanned aerial vehicle(UAV). In International Conference on Unmanned Aircraft Systems (ICUAS), pages 160–169, Miami, FL, USA. IEEE.
- [Guerra et al., 2019a] Guerra, E., Pumarola, A., Grau, A., and Sanfeliu, A. (2019a). Perception for Detection and Grasping. In Ollero, A. and Siciliano, B., editors, Aerial Robotic Manipulation, volume 129, pages 275–283. Springer International Publishing, Cham.
- [Guerra et al., 2019b] Guerra, W., Tal, E., Murali, V., Ryou, G., and Karaman, S. (2019b). FlightGoggles: A Modular Framework for Photorealistic Camera, Exteroceptive Sensor, and Dynamics Simulation. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 6941–6948, Macau, China. IEEE.
- [Gwak et al., 2020] Gwak, D. Y., Han, D., and Lee, S. (2020). Sound quality factors influencing annoyance from hovering UAV. Journal of Sound and Vibration, 489:115651.
- [Haddadi and B. Castelan, 2018] Haddadi, S. J. and B. Castelan, E. (2018). Visual-Inertial Fusion for Indoor Autonomous Navigation of a Quadrotor Using ORB-SLAM. In 2018 Latin American Robotic Symposium, 2018 Brazilian Symposium on Robotics (SBR) and 2018 Workshop on Robotics in Education (WRE), pages 106–111, Joao Pessoa. IEEE.
- [Haidari et al., 2016] Haidari, L. A., Brown, S. T., Ferguson, M., Bancroft, E., Spiker, M., Wilcox, A., Ambikapathi, R., Sampath, V., Connor, D. L., and Lee, B. Y. (2016). The economic and operational value of using drones to transport vaccines. Vaccine, 34(34):4062–4067.
- [Ham, 2018] Ham, A. M. (2018). Integrated scheduling of m-truck, m-drone, and m-depot constrained by time-window, drop-pickup, and m-visit using constraint programming. Transportation Research Part C: Emerging Technologies, 91:1–14.
- [Han et al., 2021] Han, J., Hui, Z., Tian, F., and Chen, G. (2021). Review on bio-inspired flight systems and bionic aerodynamics. Chinese Journal of Aeronautics, 34(7):170–186.
- [Hang et al., 2019] Hang, K., Lyu, X., Song, H., Stork, J. A., Dollar, A. M., Kragic, D., and Zhang, F. (2019). Perching and resting—A paradigm for UAV maneuvering with modularized landing gears. Science Robotics, 4(28).
- [Hassanalian and Abdelkefi, 2017] Hassanalian, M. and Abdelkefi, A. (2017). Classifications, applications, and design challenges of drones: A review. Progress in Aerospace Sciences, 91:99–131.
- [Heredia et al., 2014] Heredia, G., Jimenez-Cano, A., Sanchez, I., Llorente, D., Vega, V., Braga, J., Acosta, J., and Ollero, A. (2014). Control of a multirotor outdoor aerial manipulator. In IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 3417–3422, Chicago, IL, USA. IEEE.
- [Herisse et al., 2008] Herisse, B., Russotto, F.-X., Hamel, T., and Mahony, R. (2008). Hovering flight and vertical landing control of a VTOL Unmanned Aerial Vehicle using optical flow. In IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 801–806, Nice. IEEE.
- [Hingston et al., 2020] Hingston, L., Mace, J., Buzzatto, J., and Liarokapis, M. (2020). Reconfigurable, Adaptive, Lightweight Grasping Mechanisms for Aerial Robotic Platforms. In IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), pages 169–175, Abu Dhabi, United Arab Emirates. IEEE.
- [Hong et al., 2017] Hong, I., Kuby, M., and Murray, A. (2017). Deviation flow refueling location model for continuous space: commercial drone delivery system for urban area. In Advances in Geocomputation, pages 125–132, Cham. Springer.
- [Hooper et al., 2016] Hooper, M., Tian, Y., Zhou, R., Cao, B., Lauf, A. P., Watkins, L., Robinson, W. H., and Alexis, W. (2016). Securing commercial WiFi-based UAVs from common security attacks. In MILCOM 2016 - 2016 IEEE Military Communications Conference, pages 1213–1218, Baltimore, MD, USA. IEEE.
- [Huang et al., 2018] Huang, C., Yang, Z., Kong, Y., Chen, P., Yang, X., and Cheng, K.-T. (2018). Through-the-Lens Drone Filming. In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 4692–4699, Madrid. IEEE.
- [Hughes et al., 2016] Hughes, J., Culha, U., Giardina, F., Guenther, F., Rosendo, A., and Iida, F. (2016). Soft Manipulators and Grippers: A Review. Frontiers in Robotics and AI, 3.
- [Jeong et al., 2019] Jeong, H. Y., Song, B. D., and Lee, S. (2019). Truck-drone hybrid delivery routing: Payload-energy dependency and No-Fly zones. International Journal of Production Economics, 214:220–233.
- [Jeong and Illades Boy, 2018] Jeong, I.-J. and Illades Boy, C. A. (2018). Routing and refueling plans to minimize travel time in alternative-fuel vehicles. International Journal of Sustainable Transportation, 12(8):583–591.
- [Jurevičius et al., 2019] Jurevičius, R., Marcinkevičius, V., and Šeibokas, J. (2019). Robust GNSS-denied localization for UAV using particle filter and visual odometry. Machine Vision and Applications, 30(7-8):1181–1190.
- [Kang et al., 2016] Kang, K., Prasad, J. V. R., and Johnson, E. (2016). Active Control of a UAV Helicopter with a Slung Load for Precision Airborne Cargo Delivery. Unmanned Systems, 4(3):213–226.
- [Keipour et al., 2021] Keipour, A., Mousaei, M., and Scherer, S. (2021). ALFA: A dataset for UAV fault and anomaly detection. The International Journal of Robotics Research, 40(2-3):515–520.
- [Kessens et al., 2019] Kessens, C. C., Horowitz, M., Liu, C., Dotterweich, J., Yim, M., and Edge, H. L. (2019). Toward Lateral Aerial Grasping & Manipulation Using Scalable Suction. In International Conference on Robotics and Automation (ICRA), pages 4181–4186, Montreal, QC, Canada. IEEE.
- [Kessens et al., 2016] Kessens, C. C., Thomas, J., Desai, J. P., and Kumar, V. (2016). Versatile aerial grasping using self-sealing suction. In IEEE International Conference on Robotics and Automation (ICRA), pages 3249–3254, Stockholm, Sweden. IEEE.
- [Khatib, 1985] Khatib, O. (1985). Real-time obstacle avoidance for manipulators and mobile robots. In IEEE International Conference on Robotics and Automation, volume 2, pages 500–505, St. Louis, MO, USA. Institute of Electrical and Electronics Engineers.
- [Khosiawan and Nielsen, 2016] Khosiawan, Y. and Nielsen, I. (2016). A system of UAV application in indoor environment. Production & Manufacturing Research, 4(1):2–22.
- [Khoufi et al., 2021] Khoufi, I., Laouiti, A., Adjih, C., and Hadded, M. (2021). UAVs Trajectory Optimization for Data Pick Up and Delivery with Time Window. Drones, 5(2):27.
- [Kim et al., 2013] Kim, J., Song, B. D., and Morrison, J. R. (2013). On the Scheduling of Systems of UAVs and Fuel Service Stations for Long-Term Mission Fulfillment. Journal of Intelligent & Robotic Systems, 70(1-4):347–359.
- [Kim et al., 2018a] Kim, S.-J., Lee, D.-Y., Jung, G.-P., and Cho, K.-J. (2018a). An origami-inspired, self-locking robotic arm that can be folded flat. Science Robotics, 3(16).
- [Kim et al., 2018b] Kim, S. J., Lim, G. J., and Cho, J. (2018b). Drone flight scheduling under uncertainty on battery duration and air temperature. Computers & Industrial Engineering, 117:291–302.
- [Koenig and Howard, 2004] Koenig, N. and Howard, A. (2004). Design and use paradigms for gazebo, an open-source multi-robot simulator. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), volume 3, pages 2149–2154, Sendai, Japan. IEEE.
- [Kolachalama and Lakshmanan, 2020] Kolachalama, S. and Lakshmanan, S. (2020). Continuum Robots for Manipulation Applications: A Survey. Journal of Robotics, 2020:1–19.
- [Kong et al., 2013] Kong, W., Zhang, D., Wang, X., Xian, Z., and Zhang, J. (2013). Autonomous landing of an UAV with a ground-based actuated infrared stereo vision system. In IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 2963–2970, Tokyo. IEEE.
- [Kornatowski et al., 2017] Kornatowski, P., Mintchev, S., and Floreano, D. (2017). An origami-inspired cargo drone. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 6855–6862, Vancouver, BC. IEEE.
- [Kornatowski et al., 2020] Kornatowski, P. M., Feroskhan, M., Stewart, W. J., and Floreano, D. (2020). Downside Up:Rethinking Parcel Position for Aerial Delivery. IEEE Robotics and Automation Letters, 5(3):4297–4304.
- [Korpela et al., 2012] Korpela, C. M., Danko, T. W., and Oh, P. Y. (2012). MM-UAV: Mobile Manipulating Unmanned Aerial Vehicle. Journal of Intelligent & Robotic Systems, 65(1-4):93–101.
- [Kruse and Bradley, 2018] Kruse, L. and Bradley, J. (2018). A Hybrid, Actively Compliant Manipulator/Gripper for Aerial Manipulation with a Multicopter. In 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), pages 1–8, Philadelphia, PA, USA. IEEE.
- [Kulp and Mei, 2020] Kulp, P. and Mei, N. (2020). A Framework for Sensing Radio Frequency Spectrum Attacks on Medical Delivery Drones. In International Conference on Systems, Man, and Cybernetics (SMC), pages 408–413, Toronto, ON, Canada. IEEE.
- [Lavalle and Kuffner, 2000] Lavalle, S. and Kuffner, J. (2000). Rapidly-Exploring Random Trees: Progress and Prospects. Algorithmic and computational robotics: New directions.
- [Lee et al., 2017] Lee, H.-I., Yoo, D.-W., Lee, B.-Y., Moon, G.-H., Lee, D.-Y., Tahk, M.-J., and Shin, H.-S. (2017). Parameter-robust linear quadratic Gaussian technique for multi-agent slung load transportation. Aerospace Science and Technology, 71:119–127.
- [Lee et al., 2014] Lee, K., Back, J., and Choy, I. (2014). Nonlinear disturbance observer based robust attitude tracking controller for quadrotor UAVs. International Journal of Control, Automation and Systems, 12(6):1266–1275.
- [Lee et al., 2018] Lee, L., Parisotto, E., Chaplot, D. S., Xing, E., and Salakhutdinov, R. (2018). Gated Path Planning Networks. In International Conference on Machine Learning, pages 2947–2955, Stockholm, Sweden.
- [Lee and Kim, 2017] Lee, S. J. and Kim, H. J. (2017). Autonomous swing-angle estimation for stable slung-load flight of multi-rotor UAVs. In International Conference on Robotics and Automation (ICRA), pages 4576–4581, Singapore, Singapore. IEEE.
- [Leonardi and Gerardi, 2020] Leonardi, M. and Gerardi, F. (2020). Aircraft Mode S Transponder Fingerprinting for Intrusion Detection. Aerospace, 7(3):30.
- [Leutenegger et al., 2015] Leutenegger, S., Lynen, S., Bosse, M., Siegwart, R., and Furgale, P. (2015). Keyframe-based visual–inertial odometry using nonlinear optimization. The International Journal of Robotics Research, 34(3):314–334.
- [Li et al., 2021] Li, G., Tunchez, A., and Loianno, G. (2021). PCMPC: Perception-Constrained Model Predictive Control for Quadrotors with Suspended Loads using a Single Camera and IMU. In International Conference on Robotics and Automation (ICRA), pages 2012–2018, Xi’an, China. IEEE.
- [Lin et al., 2018] Lin, C. A., Shah, K., Mauntel, L. C. C., and Shah, S. A. (2018). Drone delivery of medications: Review of the landscape and legal considerations. American Journal of Health-System Pharmacy, 75(3):153–158.
- [Lin and Saripalli, 2015] Lin, Y. and Saripalli, S. (2015). Sense and avoid for Unmanned Aerial Vehicles using ADS-B. In International Conference on Robotics and Automation (ICRA), pages 6402–6407, Seattle, WA, USA. IEEE.
- [Liu et al., 2020] Liu, S., Dong, W., Ma, Z., and Sheng, X. (2020). Adaptive Aerial Grasping and Perching With Dual Elasticity Combined Suction Cup. IEEE Robotics and Automation Letters, 5(3):4766–4773.
- [Lowe, 2004] Lowe, D. G. (2004). Distinctive Image Features from Scale-Invariant Keypoints. International Journal of Computer Vision, 60(2):91–110.
- [Lu et al., 2018] Lu, Y., Xue, Z., Xia, G.-S., and Zhang, L. (2018). A survey on vision-based UAV navigation. Geo-spatial Information Science, 21(1):13.
- [Lundby et al., 2019] Lundby, T., Christiansen, M. P., and Jensen, K. (2019). Towards a Weather Analysis Software Framework to Improve UAS Operational Safety. In International Conference on Unmanned Aircraft Systems (ICUAS), pages 1372–1380, Atlanta, GA, USA. IEEE.
- [Luo et al., 2015] Luo, C., Li, X., Li, Y., and Dai, Q. (2015). Biomimetic Design for Unmanned Aerial Vehicle Safe Landing in Hazardous Terrain. IEEE/ASME Transactions on Mechatronics, 21(1):531–541.
- [Ma et al., 2019] Ma, Q., Ge, S., He, D., Thaker, D., and Drori, I. (2019). Combinatorial Optimization by Graph Pointer Networks and Hierarchical Reinforcement Learning. arXiv:1911.04936 [cs, stat]. arXiv: 1911.04936.
- [Macrina et al., 2020] Macrina, G., Di Puglia Pugliese, L., Guerriero, F., and Laporte, G. (2020). Drone-aided routing: A literature review. Transportation Research Part C: Emerging Technologies, 120:102762.
- [Majdik et al., 2017] Majdik, A. L., Till, C., and Scaramuzza, D. (2017). The Zurich urban micro aerial vehicle dataset. The International Journal of Robotics Research, 36(3):269–273.
- [Marez et al., 2020] Marez, D., Borden, S., and Nans, L. (2020). UAV Detection with a dataset augmented by domain randomization. In Palaniappan, K., Seetharaman, G., Doucette, P. J., and Harguess, J. D., editors, Geospatial Informatics X, page 6, Online Only, United States. SPIE.
- [Martí-Saumell et al., 2021] Martí-Saumell, J., Solà, J., Santamaria-Navarro, A., and Andrade-Cetto, J. (2021). Full-Body Torque-Level Non-linear Model Predictive Control for Aerial Manipulation. arXiv:2107.03722 [cs]. arXiv: 2107.03722.
- [Masone et al., 2016] Masone, C., Bulthoff, H. H., and Stegagno, P. (2016). Cooperative transportation of a payload using quadrotors: A reconfigurable cable-driven parallel robot. In International Conference on Intelligent Robots and Systems (IROS), pages 1623–1630, Daejeon, South Korea. IEEE.
- [Matthies et al., 2014] Matthies, L., Brockers, R., Kuwata, Y., and Weiss, S. (2014). Stereo vision-based obstacle avoidance for micro air vehicles using disparity space. In International Conference on Robotics and Automation (ICRA), pages 3242–3249, Hong Kong, China. IEEE.
- [McLaren et al., 2019] McLaren, A., Fitzgerald, Z., Gao, G., and Liarokapis, M. (2019). A Passive Closing, Tendon Driven, Adaptive Robot Hand for Ultra-Fast, Aerial Grasping and Perching. In International Conference on Intelligent Robots and Systems (IROS), pages 5602–5607, Macau, China. IEEE.
- [Mellinger and Kumar, 2011] Mellinger, D. and Kumar, V. (2011). Minimum snap trajectory generation and control for quadrotors. In International Conference on Robotics and Automation, pages 2520–2525, Shanghai, China. IEEE.
- [Mellinger et al., 2011] Mellinger, D., Lindsey, Q., Shomin, M., and Kumar, V. (2011). Design, modeling, estimation and control for aerial grasping and manipulation. In International Conference on Intelligent Robots and Systems, pages 2668–2673, San Francisco, CA. IEEE.
- [Mellinger et al., 2010] Mellinger, D., Shomin, M., and Kumar, V. (2010). Control of Quadrotors for Robust Perching and Landing. In Proceedings of the International Powered Lift Conference, pages 205–255, Philadelphia, Pennsylvania, USA.
- [Meng et al., 2020] Meng, X., He, Y., and Han, J. (2020). Survey on Aerial Manipulator: System, Modeling, and Control. Robotica, 38(7):1288–1317.
- [Mezei et al., 2015] Mezei, J., Fiaska, V., and Molnar, A. (2015). Drone sound detection. In 2015 16th IEEE International Symposium on Computational Intelligence and Informatics (CINTI), pages 333–338, Budapest, Hungary. IEEE.
- [Michael et al., 2011] Michael, N., Fink, J., and Kumar, V. (2011). Cooperative manipulation and transportation with aerial robots. Autonomous Robots, 30(1):73–86.
- [Miljkovic, 2018] Miljkovic, D. (2018). Methods for attenuation of unmanned aerial vehicle noise. In 2018 41st International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), pages 0914–0919, Opatija. IEEE.
- [Mittal et al., 2020] Mittal, P., Singh, R., and Sharma, A. (2020). Deep learning-based object detection in low-altitude UAV datasets: A survey. Image and Vision Computing, 104:104046.
- [Miyazaki et al., 2019] Miyazaki, R., Jiang, R., Paul, H., Huang, Y., and Shimonomura, K. (2019). Long-Reach Aerial Manipulation Employing Wire-Suspended Hand With Swing-Suppression Device. IEEE Robotics and Automation Letters, 4(3):3045–3052.
- [Mohamed et al., 2019] Mohamed, S. A. S., Haghbayan, M., Westerlund, T., Heikkonen, J., Tenhunen, H., and Plosila, J. (2019). A Survey on Odometry for Autonomous Navigation Systems. IEEE Access, 7:97466–97486.
- [Mohiuddin et al., 2020] Mohiuddin, A., Tarek, T., Zweiri, Y., and Gan, D. (2020). A Survey of Single and Multi-UAV Aerial Manipulation. Unmanned Systems, 08(02):119–147.
- [Montemerlo et al., 2003] Montemerlo, M., Thrun, S., Koller, D., and Wegbreit, B. (2003). FastSLAM 2.0: An Improved Particle Filtering Algorithm for Simultaneous Localization and Mapping that Provably Converges. International Joint Conference on Artificial Intelligence (IJCAI), 3:1151–1156.
- [Mourgelas et al., 2020] Mourgelas, C., Kokkinos, S., Milidonis, A., and Voyiatzis, I. (2020). Autonomous drone charging stations: A survey. In 24th Pan-Hellenic Conference on Informatics, pages 233–236, Athens Greece. ACM.
- [Mourikis and Roumeliotis, 2007] Mourikis, A. I. and Roumeliotis, S. I. (2007). A Multi-State Constraint Kalman Filter for Vision-aided Inertial Navigation. In International Conference on Robotics and Automation, pages 3565–3572, Rome, Italy. IEEE.
- [Mur-Artal et al., 2015] Mur-Artal, R., Montiel, J. M. M., and Tardos, J. D. (2015). ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Transactions on Robotics, 31(5):17.
- [Murray, 2020] Murray, C. C. (2020). The multiple flying sidekicks traveling salesman problem parcel delivery with multiple drones. Transportation Research Part C: Emerging Technologies,, 110:368–398.
- [Murray and Chu, 2015] Murray, C. C. and Chu, A. G. (2015). The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery. Transportation Research Part C: Emerging Technologies, 54:86–109.
- [Nelson et al., 2019] Nelson, J. R., Grubesic, T. H., Wallace, D., and Chamberlain, A. W. (2019). The View from Above: A Survey of the Public’s Perception of Unmanned Aerial Vehicles and Privacy. Journal of Urban Technology, 26(1):83–105.
- [Nemra and Aouf, 2010] Nemra, A. and Aouf, N. (2010). Robust INS/GPS Sensor Fusion for UAV Localization Using SDRE Nonlinear Filtering. IEEE Sensors Journal, 10(4):789–798.
- [Nentwich and Horváth, 2018] Nentwich, M. and Horváth, D. M. (2018). The vision of delivery drones: Call for a technology assessment perspective. Journal for Technology Assessment in Theory and Practice, 27(2):46–52.
- [Nguyen et al., 2020] Nguyen, H., Quyen, T., Nguyen, C., Le, A., Tran, H., and Nguyen, M. (2020). Control Algorithms for UAVs: A Comprehensive Survey. EAI Endorsed Transactions on Industrial Networks and Intelligent Systems, 7(23):164586.
- [Nguyen et al., 2019] Nguyen, K. D., Nguyen, T.-T., and Ha, C. (2019). Graph-SLAM Based Hardware-in-the-Loop-Simulation for Unmanned Aerial Vehicles Using Gazebo and PX4 Open Source. In Huang, D.-S., Jo, K.-H., and Huang, Z.-K., editors, International Conference on Intelligent Computing, volume 11644, pages 615–627, Cham. Springer International Publishing.
- [Nguyen and Chan, 2018] Nguyen, Q.-V. and Chan, W. L. (2018). Development and flight performance of a biologically-inspired tailless flapping-wing micro air vehicle with wing stroke plane modulation. Bioinspiration & Biomimetics, 14(1):016015.
- [Nguyen et al., 2022] Nguyen, T.-M., Yuan, S., Cao, M., Lyu, Y., Nguyen, T. H., and Xie, L. (2022). NTU VIRAL: A visual-inertial-ranging-lidar dataset, from an aerial vehicle viewpoint. The International Journal of Robotics Research, 41(3):270–280.
- [Ollero et al., 2018] Ollero, A., Heredia, G., Franchi, A., Antonelli, G., Kondak, K., Sanfeliu, A., Viguria, A., Dios, J. R. M.-D., Pierri, F., Cortés, J., Santamaria-Navarro, A., Trujillo, M., Balachandran, R., Andrade-Cetto, J., and Rodriguez, A. (2018). The AEROARMS Project: Aerial Robots with Advanced Manipulation Capabilities for Inspection and Maintenance. IEEE Robotics & Automation Magazine, 24(4):12–23.
- [Ottoni et al., 2022] Ottoni, A. L. C., Nepomuceno, E. G., Oliveira, M. S. d., and Oliveira, D. C. R. d. (2022). Reinforcement learning for the traveling salesman problem with refueling. Complex & Intelligent Systems, 8(3):2001–2015.
- [Palunko et al., 2012] Palunko, I., Fierro, R., and Cruz, P. (2012). Trajectory generation for swing-free maneuvers of a quadrotor with suspended payload: A dynamic programming approach. In 2012 IEEE International Conference on Robotics and Automation, pages 2691–2697, St Paul, MN, USA. IEEE.
- [Pan et al., 2019] Pan, Y., Li, S., Li, B., Bhargav, B., Ning, Z., Han, Q., and Zhu, T. (2019). When UAVs coexist with manned airplanes: Large‐scale aerial network management using ADS‐B. Transactions on Emerging Telecommunications Technologies, 30(10).
- [Panerati et al., 2021] Panerati, J., Zheng, H., Zhou, S., Xu, J., Prorok, A., and Schoellig, A. P. (2021). Learning to Fly – a Gym Environment with PyBullet Physics for Reinforcement Learning of Multi-agent Quadcopter Control. In International Conference on Intelligent Robots and Systems (IROS), pages 7512–7519, Prague, Czech Republic. IEEE/RSJ.
- [Paris et al., 2020] Paris, A., Lopez, B. T., and How, J. P. (2020). Dynamic Landing of an Autonomous Quadrotor on a Moving Platform in Turbulent Wind Conditions. In 2020 IEEE International Conference on Robotics and Automation (ICRA), pages 9577–9583, Paris, France. IEEE.
- [Pedro et al., 2020] Pedro, D., Mora, A., Carvalho, J., Azevedo, F., and Fonseca, J. (2020). ColANet: A UAV Collision Avoidance Dataset. In Camarinha-Matos, L. M., Farhadi, N., Lopes, F., and Pereira, H., editors, Doctoral Conference on Computing, Electrical and Industrial Systems, pages 53–62, Cham. Springer International Publishing. Series Title: IFIP Advances in Information and Communication Technology.
- [Peng et al., 2009] Peng, W., Zhang, Q., and Li, H. (2009). Comparison between MOEA/D and NSGA-II on the Multi-Objective Travelling Salesman Problem. In Goh, C.-K., Ong, Y.-S., and Tan, K. C., editors, Multi-Objective Memetic Algorithms, volume 171, pages 309–324. Springer Berlin Heidelberg, Berlin, Heidelberg.
- [Penicka et al., 2017] Penicka, R., Faigl, J., Vana, P., and Saska, M. (2017). Dubins orienteering problem with neighborhoods. In 2017 International Conference on Unmanned Aircraft Systems (ICUAS), pages 1555–1562, Miami, FL, USA. IEEE.
- [Phan et al., 2017] Phan, H. V., Kang, T., and Park, H. C. (2017). Design and stable flight of a 21 g insect-like tailless flapping wing micro air vehicle with angular rates feedback control. Bioinspiration & Biomimetics, 12(3):036006.
- [Phillips et al., 2017] Phillips, B., Hrishikeshavan, V., Yeo, D., and Chopra, I. (2017). Flight Performance of a Package Delivery Quadrotor Biplane. In Technical Meeting on VTOL Unmanned Aircraft Systems, page 12, Phoenix, AZ, USA. American Helicopter Society.
- [Phung, 2017] Phung, M. D. (2017). Enhanced discrete particle swarm optimization path planning for UAV vision-based surface inspection. Automation in Construction, 81:25–33.
- [Popek et al., 2018] Popek, K. M., Johannes, M. S., Wolfe, K. C., Hegeman, R. A., Hatch, J. M., Moore, J. L., Katyal, K. D., Yeh, B. Y., and Bamberger, R. J. (2018). Autonomous Grasping Robotic Aerial System for Perching (AGRASP). In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 1–9, Madrid. IEEE.
- [Pounds et al., 2011] Pounds, P. E. I., Bersak, D. R., and Dollar, A. M. (2011). Grasping from the air: Hovering capture and load stability. In 2011 IEEE International Conference on Robotics and Automation, pages 2491–2498, Shanghai, China. IEEE.
- [Prkacin et al., 2020] Prkacin, V., Palunko, I., and Petrovic, I. (2020). State and parameter estimation of suspended load using quadrotor onboard sensors. In 2020 International Conference on Unmanned Aircraft Systems (ICUAS), pages 958–967, Athens, Greece. IEEE.
- [Queralta et al., 2020] Queralta, J. P., Martinez Almansa, C., Schiano, F., Floreano, D., and Westerlund, T. (2020). UWB-based System for UAV Localization in GNSS-Denied Environments: Characterization and Dataset. In 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 4521–4528, Las Vegas, NV, USA. IEEE.
- [Qureshi et al., 2019] Qureshi, A. H., Simeonov, A., Bency, M. J., and Yip, M. C. (2019). Motion Planning Networks. In International Conference on Robotics and Automation (ICRA), pages 2118–2124, Montreal, Canada. IEEE.
- [Ramon-Soria et al., 2019] Ramon-Soria, P., Gomez-Tamm, A., Garcia-Rubiales, F., Arrue, B., and Ollero, A. (2019). Autonomous landing on pipes using soft gripper for inspection and maintenance in outdoor environments. In 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 5832–5839, Macau, China. IEEE.
- [Rastgoftar and Atkins, 2018] Rastgoftar, H. and Atkins, E. M. (2018). Cooperative aerial lift and manipulation (CALM). Aerospace Science and Technology, 82-83:105–118.
- [Redmon and Farhadi, 2018] Redmon, J. and Farhadi, A. (2018). YOLOv3: An Incremental Improvement. arXiv:1804.02767 [cs]. arXiv: 1804.02767.
- [Rieke et al., 2012] Rieke, M., Foerster, T., Geipel, J., and Prinz, T. (2012). High-precision positioning and real-time data processing of UAV systems. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 38(1):119–124.
- [Ro et al., 2007] Ro, K., Raghu, K., and Barlow, J. B. (2007). Aerodynamic Characteristics of a Free-Wing Tilt-Body Unmanned Aerial Vehicle. Journal of Aircraft, 44(5):1619–1629.
- [Rossi, 2015] Rossi, M. (2015). Autonomous Gas Detection and Mapping With Unmanned Aerial Vehicles. IEEE Transactions on Instrumentation and Measurement, 65(4):765–775.
- [Rueckauer and Delbruck, 2016] Rueckauer, B. and Delbruck, T. (2016). Evaluation of Event-Based Algorithms for Optical Flow with Ground-Truth from Inertial Measurement Sensor. Frontiers in Neuroscience, 10.
- [Ruggiero et al., 2018] Ruggiero, F., Lippiello, V., and Ollero, A. (2018). Aerial Manipulation: A Literature Review. IEEE Robotics and Automation Letters, 3(3):1957–1964.
- [Rusinkiewicz and Levoy, 2001] Rusinkiewicz, S. and Levoy, M. (2001). Efficient variants of the ICP algorithm. In Proceedings Third International Conference on 3-D Digital Imaging and Modeling, pages 145–152, Quebec City, Que., Canada. IEEE Comput. Soc.
- [Saeedi et al., 2019] Saeedi, S., Carvalho, E. D. C., Li, W., Tzoumanikas, D., Leutenegger, S., Kelly, P. H. J., and Davison, A. J. (2019). Characterizing Visual Localization and Mapping Datasets. In International Conference on Robotics and Automation (ICRA), pages 6699–6705, Montreal, QC, Canada. IEEE.
- [Saeedi et al., 2016] Saeedi, S., Trentini, M., Seto, M., and Li, H. (2016). Multiple-Robot Simultaneous Localization and Mapping: A Review: Multiple-Robot Simultaneous Localization and Mapping. Journal of Field Robotics, 33(1):3–46.
- [Sahawneh et al., 2015] Sahawneh, L. R., Duffield, M. O., Beard, R. W., and McLain, T. W. (2015). Detect and Avoid for Small Unmanned Aircraft Systems Using ADS-B. Air Traffic Control Quarterly, 23(2-3):203–240.
- [Samadikhoshkho et al., 2020] Samadikhoshkho, Z., Ghorbani, S., and Janabi-Sharifi, F. (2020). Modeling and Control of Aerial Continuum Manipulation Systems: A Flying Continuum Robot Paradigm. IEEE Access, 8:176883–176894.
- [San et al., 2016] San, K. T., Lee, E. Y., and Chang, Y. S. (2016). The delivery assignment solution for swarms of UAVs dealing with multi-dimensional chromosome representation of genetic algorithm. In 2016 IEEE 7th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), pages 1–7, New York City, NY, USA. IEEE.
- [Sanalitro et al., 2020] Sanalitro, D., Savino, H. J., Tognon, M., Cortes, J., and Franchi, A. (2020). Full-Pose Manipulation Control of a Cable-Suspended Load With Multiple UAVs Under Uncertainties. IEEE Robotics and Automation Letters, 5(2):2185–2191.
- [Sanchez-Cuevas et al., 2017] Sanchez-Cuevas, P., Heredia, G., and Ollero, A. (2017). Characterization of the Aerodynamic Ground Effect and Its Influence in Multirotor Control. International Journal of Aerospace Engineering, 2017:1–17.
- [santos et al., 2018] santos, S. o., Yu, W., and Zamora, E. (2018). Sliding mode three-dimension SLAM with application to quadrotor helicopter. In 2018 15th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), pages 1–6, Mexico City. IEEE.
- [Saripalli et al., 2002] Saripalli, S., Montgomery, J., and Sukhatme, G. (2002). Vision-based autonomous landing of an unmanned aerial vehicle. In International Conference on Robotics and Automation, volume 3, pages 2799–2804, Washington, DC, USA. IEEE.
- [Sarkisov et al., 2019] Sarkisov, Y. S., Kim, M. J., Bicego, D., Tsetserukou, D., Ott, C., Franchi, A., and Kondak, K. (2019). Development of SAM: cable-Suspended Aerial Manipulator . In 2019 International Conference on Robotics and Automation (ICRA), pages 5323–5329, Montreal, QC, Canada. IEEE.
- [Saska et al., 2016] Saska, M., Baca, T., Spurny, V., Loianno, G., Thomas, J., Krajnik, T., Stepan, P., and Kumar, V. (2016). Vision-based high-speed autonomous landing and cooperative objects grasping - towards the MBZIRC competition. In International Conference on Intelligent Robots and Systems, pages 9–14, Daejeon, Korea. IEEE.
- [Schäffer et al., 2021] Schäffer, B., Pieren, R., Heutschi, K., Wunderli, J. M., and Becker, S. (2021). Drone Noise Emission Characteristics and Noise Effects on Humans—A Systematic Review. International Journal of Environmental Research and Public Health, 18(11):5940.
- [Seo et al., 2015] Seo, S.-H., Lee, B.-H., Im, S.-H., and Jee, G.-I. (2015). Effect of Spoofing on Unmanned Aerial Vehicle using Counterfeited GPS Signal. Journal of Positioning, Navigation, and Timing, 4(2):57–65.
- [Shah et al., 2017] Shah, S., Dey, D., Lovett, C., and Kapoor, A. (2017). AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles. Field and service robotics, pages 621–635. Springer, Cham.
- [Shakhatreh et al., 2019] Shakhatreh, H., Sawalmeh, A. H., Al-Fuqaha, A., Dou, Z., Almaita, E., Khalil, I., Othman, N. S., Khreishah, A., and Guizani, M. (2019). Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access, 7:48572–48634.
- [Sharma et al., 2021] Sharma, K., Singh, H., Sharma, D. K., Kumar, A., Nayyar, A., and Krishnamurthi, R. (2021). Dynamic Models and Control Techniques for Drone Delivery of Medications and Other Healthcare Items in COVID-19 Hotspots. In Al-Turjman, F., Devi, A., and Nayyar, A., editors, Emerging Technologies for Battling Covid-19, volume 324, pages 1–34. Springer International Publishing.
- [Shen et al., 2017] Shen, Z., Cheng, X., Zhou, S., Tang, X.-M., and Wang, H. (2017). A dynamic airspace planning framework with ADS-B tracks for manned and unmanned aircraft at low-altitude sharing airspace. In 2017 IEEE/AIAA 36th Digital Avionics Systems Conference (DASC), pages 1–7, St. Petersburg, FL. IEEE.
- [Shirani et al., 2019] Shirani, B., Najafi, M., and Izadi, I. (2019). Cooperative load transportation using multiple UAVs. Aerospace Science and Technology, 84:158–169.
- [Shraim et al., 2018] Shraim, H., Awada, A., and Youness, R. (2018). A survey on quadrotors: Configurations, modeling and identification, control, collision avoidance, fault diagnosis and tolerant control. IEEE Aerospace and Electronic Systems Magazine, 33(7):14–33.
- [Singhal et al., 2018] Singhal, G., Bansod, B., and Mathew, L. (2018). Unmanned Aerial Vehicle Classification, Applications and Challenges: A Review. Preprints.
- [Son et al., 2018] Son, C. Y., Seo, H., Kim, T., and Jin Kim, H. (2018). Model Predictive Control of a Multi-Rotor with a Suspended Load for Avoiding Obstacles. In 2018 IEEE International Conference on Robotics and Automation (ICRA), pages 1–6, Brisbane, QLD. IEEE.
- [Song et al., 2021] Song, Y., Naji, S., Kaufmann, E., Loquercio, A., and Scaramuzza, D. (2021). Flightmare: A Flexible Quadrotor Simulator. arXiv:2009.00563 [cs]. arXiv: 2009.00563.
- [Spurný et al., 2019] Spurný, V., Báča, T., Saska, M., Pěnička, R., Krajník, T., Thomas, J., Thakur, D., Loianno, G., and Kumar, V. (2019). Cooperative autonomous search, grasping, and delivering in a treasure hunt scenario by a team of unmanned aerial vehicles. Journal of Field Robotics, 36(1):125–148.
- [Sreenath et al., 2013] Sreenath, K., Lee, T., and Kumar, V. (2013). Geometric Control and Differential Flatness of a Quadrotor UAV with a Cable-Suspended Load. In 52nd Conference on Decision and Control, pages 2269–2274, Florence, Italy. IEEE.
- [Stöcker et al., 2017] Stöcker, C., Bennett, R., Nex, F., Gerke, M., and Zevenbergen, J. (2017). Review of the Current State of UAV Regulations. Remote Sensing, 9(5):459.
- [Sun et al., 2017] Sun, J., Tang, J., and Lao, S. (2017). Collision Avoidance for Cooperative UAVs With Optimized Artificial Potential Field Algorithm. IEEE Access, 5:18382–18390.
- [Sutera et al., 2020] Sutera, G., Guastella, D. C., and Muscato, G. (2020). A Novel Design of a Lightweight Magnetic Plate for a Delivery Drone. In 23rd International Symposium on Measurement and Control in Robotics (ISMCR), pages 1–4, Budapest, Hungary. IEEE.
- [Suzuki and Lan, 2018] Suzuki, Y. and Lan, B. (2018). Cutting fuel consumption of truckload carriers by using new enhanced refueling policies. International Journal of Production Economics, 202:69–80.
- [Tai et al., 2016] Tai, K., El-Sayed, A.-R., Shahriari, M., Biglarbegian, M., and Mahmud, S. (2016). State of the Art Robotic Grippers and Applications. Robotics, 5(2):11.
- [Takleh Omar Takleh et al., 2018] Takleh Omar Takleh, T., Abu Bakar, N., Abdul Rahman, S., Hamzah, R., and Abd Aziz, Z. (2018). A Brief Survey on SLAM Methods in Autonomous Vehicle. International Journal of Engineering & Technology, 7(4.27):38.
- [Tamar et al., 2017] Tamar, A., Wu, Y., Thomas, G., Levine, S., and Abbeel, P. (2017). Value Iteration Networks. In arXiv:1602.02867 [cs, stat], volume 29, pages 2154–2162, Barcelona, Spain. Curran Associates, Inc.
- [Tang and Kumar, 2015] Tang, S. and Kumar, V. (2015). Mixed Integer Quadratic Program trajectory generation for a quadrotor with a cable-suspended payload. In 2015 IEEE International Conference on Robotics and Automation (ICRA), pages 2216–2222, Seattle, WA, USA. IEEE.
- [Taylor, 2008] Taylor, C. N. (2008). Fusion of inertial, vision, and air pressure sensors for MAV navigation. In 2008 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, pages 475–480, Seoul. IEEE.
- [Thrun and Montemerlo, 2006] Thrun, S. and Montemerlo, M. (2006). The Graph SLAM Algorithm with Applications to Large-Scale Mapping of Urban Structures. The International Journal of Robotics Research, 25(5-6):403–429.
- [Tianyu et al., 2015] Tianyu, L., Yongzhe, L., Juntong, Q., Xiangdong, M., and Jianda, H. (2015). Modeling and controller design of hydraulic rotorcraft aerial manipulator. In The 27th Chinese Control and Decision Conference (2015 CCDC), pages 5446–5452, Qingdao, China. IEEE.
- [Toma et al., 2021] Toma, A.-I., Jaafar, H. A., Hsueh, H.-Y., James, S., Lenton, D., Clark, R., and Saeedi, S. (2021). Waypoint Planning Networks. arXiv:2105.00312 [cs]. arXiv: 2105.00312.
- [Torija, 2019] Torija, A. J. (2019). Psychoacoustic Characterisation of a Small Fixed-pitch Quadcopter. In Inter-Noise and Noise-Con Congress and Conference Proceedings, volume 259, pages 1884–1894, Madrid, Spain. Institute of Noise Control Engineering.
- [Toth and Vigo, 2002] Toth, P. and Vigo, D., editors (2002). The vehicle routing problem. Society for Industrial and Applied Mathematics.
- [Tseng et al., 2022] Tseng, C.-M., Chau, C.-K., Elbassioni, K., and Khonji, M. (2022). Autonomous Recharging and Flight Mission Planning for Battery-operated Autonomous Drones. IEEE Transactions on Automation Science and Engineering., pages 1–13.
- [Tsukagoshi et al., 2015] Tsukagoshi, H., Watanabe, M., Hamada, T., Ashlih, D., and Iizuka, R. (2015). Aerial manipulator with perching and door-opening capability. In 2015 IEEE International Conference on Robotics and Automation (ICRA), pages 4663–4668, Seattle, WA, USA. IEEE.
- [Tzoumanikas et al., 2019] Tzoumanikas, D., Li, W., Grimm, M., Zhang, K., Kovac, M., and Leutenegger, S. (2019). Fully autonomous micro air vehicle flight and landing on a moving target using visual-inertial estimation and model-predictive control. Journal of Field Robotics, 36(1):49–77.
- [Vannoy and Medlin, 2018] Vannoy, S. A. and Medlin, B. D. (2018). Commercial Drone Activity: Security, Privacy, and Legislation Issues. Information Systems, (4817):7.
- [Vasconcelos et al., 2019] Vasconcelos, G., Miani, R. S., Guizilini, V. C., and Souza, J. R. (2019). Evaluation of DoS attacks on Commercial Wi-Fi-Based UAVs. International Journal of Communication Networks and Information Security, 11(1):212–223.
- [Velas et al., 2016] Velas, M., Spanel, M., and Herout, A. (2016). Collar Line Segments for fast odometry estimation from Velodyne point clouds. In 2016 IEEE International Conference on Robotics and Automation (ICRA), pages 4486–4495, Stockholm, Sweden. IEEE.
- [Venugopalan et al., 2012] Venugopalan, T. K., Taher, T., and Barbastathis, G. (2012). Autonomous landing of an Unmanned Aerial Vehicle on an autonomous marine vehicle. In 2012 Oceans, pages 1–9, Hampton Roads, VA. IEEE.
- [Vieira-e Silva et al., 2021] Vieira-e Silva, A. L. B., de Castro Felix, H., de Menezes Chaves, T., Simoes, F. P. M., Teichrieb, V., dos Santos, M. M., da Cunha Santiago, H., Sgotti, V. A. C., and Neto, H. B. D. T. L. (2021). STN PLAD: A Dataset for Multi-Size Power Line Assets Detection in High-Resolution UAV Images. In Conference on Graphics, Patterns and Images (SIBGRAPI), pages 215–222, Gramado, Rio Grande do Sul, Brazil. IEEE.
- [Villa et al., 2020] Villa, D. K. D., Brandão, A. S., and Sarcinelli-Filho, M. (2020). A Survey on Load Transportation Using Multirotor UAVs. Journal of Intelligent & Robotic Systems, 98(2):267–296.
- [Wang et al., 2017] Wang, X., Poikonen, S., and Golden, B. (2017). The vehicle routing problem with drones: several worst-case results. Optimization Letters, 11(4):679–697.
- [Weldon et al., 2021] Weldon, W. T., Hupy, J., Lercel, D., and Gould, K. (2021). The Use of Aviation Safety Practices in UAS Operations: A Review. The Collegiate Aviation Review International, 39(1).
- [Westerlund and Asif, 2019] Westerlund, O. and Asif, R. (2019). Drone Hacking with Raspberry-Pi 3 and WiFi Pineapple: Security and Privacy Threats for the Internet-of-Things. In 2019 1st International Conference on Unmanned Vehicle Systems-Oman (UVS), pages 1–10, Muscat, Oman. IEEE.
- [Winter et al., 2016] Winter, S. R., Rice, S., Tamilselvan, G., and Tokarski, R. (2016). Mission-based citizen views on UAV usage and privacy: an affective perspective. Journal of Unmanned Vehicle Systems, 4(2):125–135.
- [Wu et al., 2017] Wu, Y., Sui, Y., and Wang, G. (2017). Vision-Based Real-Time Aerial Object Localization and Tracking for UAV Sensing System. IEEE Access, 5:23969–23978.
- [Wu et al., 2020] Wu, Z., Shang, T., and Guo, A. (2020). Security Issues in Automatic Dependent Surveillance - Broadcast (ADS-B): A Survey. IEEE Access, 8:122147–122167.
- [Xian et al., 2020] Xian, B., Wang, S., and Yang, S. (2020). An Online Trajectory Planning Approach for a Quadrotor UAV With a Slung Payload. IEEE Transactions on Industrial Electronics, 67(8):6669–6678.
- [Xu et al., 2019] Xu, Y., Zhang, Y., Liu, H., and Wang, X. (2019). Deep learning for UAV autonomous landing based on self-built image dataset. In Nikolaev, D. P., Radeva, P., Verikas, A., and Zhou, J., editors, International Conference on Machine Vision (ICMV), page 11, Munich, Germany. SPIE.
- [Yaacoub et al., 2020] Yaacoub, J.-P., Noura, H., Salman, O., and Chehab, A. (2020). Security analysis of drones systems: Attacks, limitations, and recommendations. Internet of Things, 11:100218.
- [Yang et al., 2014] Yang, B., He, Y., Han, J., and Liu, G. (2014). Rotor-Flying Manipulator: Modeling, Analysis, and Control. Mathematical Problems in Engineering, 20014.
- [Yang and Scherer, 2017] Yang, S. and Scherer, S. (2017). Direct Monocular Odometry Using Points and Lines. In International Conference on Robotics and Automation (ICRA), pages 3871–3877, Marina Bay Sands, Singapore. IEEE.
- [Yang et al., 2016] Yang, T., Li, G., Li, J., Zhang, Y., Zhang, X., Zhang, Z., and Li, Z. (2016). A Ground-Based Near Infrared Camera Array System for UAV Auto-Landing in GPS-Denied Environment. Sensors, 16(9):1393.
- [Yang et al., 2018] Yang, T., Ren, Q., Zhang, F., Xie, B., Ren, H., Li, J., and Zhang, Y. (2018). Hybrid Camera Array-Based UAV Auto-Landing on Moving UGV in GPS-Denied Environment. Remote Sensing, 10(11):1829.
- [Yang et al., 2019] Yang, Y., Peng, Y., Pu, H., Chen, H., Ding, X., Chirikjian, G. S., and Lyu, S. (2019). Deployable parallel lower-mobility manipulators with scissor-like elements. Mechanism and Machine Theory, 135:226–250.
- [Yonetani et al., 2021] Yonetani, R., Taniai, T., Barekatain, M., Nishimura, M., and Kanezaki, A. (2021). Path Planning using Neural A* Search. In International conference on machine learning, pages 12029–12039.
- [Yu et al., 2018a] Yu, K., Budhiraja, A. K., and Tokekar, P. (2018a). Algorithms for Routing of Unmanned Aerial Vehicles with Mobile Recharging Stations. In international conference on robotics and automation, pages 5720–5725, Brisbane, Australia. IEEE.
- [Yu and Zhang, 2015] Yu, X. and Zhang, Y. (2015). Sense and avoid technologies with applications to unmanned aircraft systems: Review and prospects. Progress in Aerospace Sciences, 74:152–166.
- [Yu et al., 2018b] Yu, Y., Tingting, W., Long, C., and Weiwei, Z. (2018b). Stereo vision based obstacle avoidance strategy for quadcopter UAV. In 2018 Chinese Control And Decision Conference (CCDC), pages 490–494, Shenyang. IEEE.
- [Zhang and Singh, 2014] Zhang, J. and Singh, S. (2014). LOAM: Lidar Odometry and Mapping in Real-time. In Robotics: Science and Systems, volume 2.
- [Zhang et al., 2019] Zhang, K., Chermprayong, P., Tzoumanikas, D., Li, W., Grimm, M., Smentoch, M., Leutenegger, S., and Kovac, M. (2019). Bioinspired design of a landing system with soft shock absorbers for autonomous aerial robots. Journal of Field Robotics, 36(1):230–251.
- [Zhang et al., 2020] Zhang, R., Prokhorchuk, A., and Dauwels, J. (2020). Deep Reinforcement Learning for Traveling Salesman Problem with Time Windows and Rejections. In 2020 International Joint Conference on Neural Networks (IJCNN), pages 1–8, Glasgow, United Kingdom. IEEE.
- [Zhao et al., 2016] Zhao, C., Gu, J., Hu, J., Lyu, Y., and Wang, D. (2016). Research on cooperative sense and avoid approaches based on ADS-B for unmanned aerial vehicle. In 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), pages 1541–1546, Nanjing, China. IEEE.
- [Zhao et al., 2017] Zhao, M., Kawasaki, K., Chen, X., Noda, S., Okada, K., and Inaba, M. (2017). Whole-body aerial manipulation by transformable multirotor with two-dimensional multilinks. In 2017 IEEE International Conference on Robotics and Automation (ICRA), pages 5175–5182, Singapore, Singapore. IEEE.
- [Zhao et al., 2018] Zhao, N., Luo, Y., Deng, H., Shen, Y., and Xu, H. (2018). The Deformable Quad-Rotor Enabled and Wasp-Pedal-Carrying Inspired Aerial Gripper. In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 1–9, Madrid. IEEE.
- [Zhao et al., 2021] Zhao, S., Zhang, H., Wang, P., Nogueira, L., and Scherer, S. (2021). Super Odometry: IMU-centric LiDAR-Visual-Inertial Estimator for Challenging Environments. In International Conference on Intelligent Robots and Systems (IROS), pages 8729–8736, Prague, Czech Republic. IEEE.
- [Zhi et al., 2020] Zhi, Y., Fu, Z., Sun, X., and Yu, J. (2020). Security and Privacy Issues of UAV: A Survey. Mobile Networks and Applications, 25(1):95–101.
- [Zhou et al., 2021] Zhou, Y., Gallego, G., and Shen, S. (2021). Event-Based Stereo Visual Odometry. IEEE Transactions on Robotics, 37(5):1433–1450.
- [Zipfel, 2007] Zipfel, P. H. (2007). Modeling and simulation of aerospace vehicle dynamics. AIAA education series. American Institute of Aeronautics and Astronautics, Reston, Va, 2nd ed edition.
- [Öztürk and Erçelebi, 2021] Öztürk, A. E. and Erçelebi, E. (2021). Real UAV-Bird Image Classification Using CNN with a Synthetic Dataset. Geospatial Informatics X, 11398:39–50.