Analytical evaluation of the effect of deterministic control error
on isolated quantum system
Abstract
We investigate the effect of analog control errors which deterministically occurrs on isolated quantum dynamics. Quantum information technologies require careful control for preparing a desired quantum state used as an information resource. However, in realistic experiment systems, it is difficult to implement the driving Hamiltonian without analog errors and the actual performance of quantum control is far away from the ideal one. Towards this problem, we derive a lower bound of the overlap between two isolated quantum systems obeying time evolution in the absence and presence of deterministic control errors. We demonstrate the effectiveness of the bound through some examples. Furthermore, by using this bound, we give an analytical estimate on the probability of obtaining the target state under any control errors.
I Introduction
Quantum information technologies actively use a time evolution of quantum systems. To realize an ideal evolution, it is needed to implement the Hamiltonian driving the quantum system desirably. If a quantum system is perfectly isolated from the environments, its evolution is simply expressed by the Schrdinger equation [1]. In fact, the scheme of quantum annealing [2, 3, 4, 5] or quantum adiabatic computation [6, 7, 8, 9] are described by it.
However, physical implementation of quantum control suffer from analog control errors, such as a bias of the magnetic field or detuning caused by the control laser. In realistic situation, it is difficult to perfectly implement the Hamiltonian without control errors. Mainly, analog control errors are divided into deterministic error and stochastic error (decoherence induced by the interaction with the environment will not be treated in this paper). In recent years, the influence of stochastic noise on isolated quantum systems has been studied [10, 11]. The impact of deterministic errors has also been investigated in the literature [12, 13, 14, 15], but these are limited to individual issues, and there has been no general consideration so far.
Inspired by the above facts, we analytically evaluate the deterministic control errors that appear in control Hamiltonians and how this affects quantum state preparation and quantum protocols. Specifically, we derive the lower bound of the overlap between two time-evolved states in isolated quantum system with and without control errors at a given time. This lower bound is given by the largest eigenvalue of the operator representing the control error. We demonstrated its effectiveness through simple examples, showing that it gives a better estimation for global control error, rather than collective error. Furthermore, by using the obtained bound, we provide an analytical estimation on the probability for getting the target state can be obtained under control errors.
II Main result
We first consider the ideal evolution of the quantum system:
| (1) |
where is the quantum state and is the time-dependent control Hamiltonian. We assume that reaches the target state at final time . Next, we consider the case where a control error occurs in the Hamiltonian. In this case, the quantum state obeys the following equation:
| (2) |
and . is the time-dependent Hermitian operator representing the control error. What is our interest here is how much affects the state preparation described by Eq. (1). To analytically evaluate this problem, we define the cost function as follows:
| (3) |
which represents the closeness between and . when and decreases at under . Under this setting, we present a lower bound of :
Theorem 1. The overlap (3) has the lower bound at some final time as follows:
| (4) |
where . is the largest eigenvalue of and time-average . This derivation is based on the method of [16] and given in Appendix A.
The inequality gives a lower bound on the distance between the states obeying the dynamics in the absence and presence of control error. Here the important points are listed below.
(i) When is large, it is generally difficult to satisfy the condition , and this theorem appears to be unusable. However, it can be possible to reduce the control error by changing the parameters slowly. In addition, even if the error strength is large, it may be possible to reduce by high-speed operations. Therefore, this condition is not impractical.
(ii) This result can be extended to the case where the system is subjected to multiple errors . In this case, is generalized to
| (5) |
This proof is given in Appendix B.
(iii) In particular, for small , the bound can be approximated as
| (6) |
Therefore, the distance between and diverges more slowly than the cosine function.
III Example
We examine the effectiveness of the bound through some examples.
III.1 One-qubit
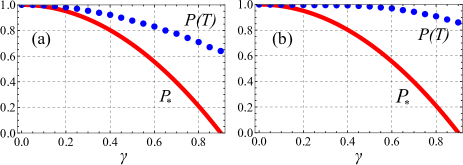
The first example is the one-qubit system consisting of the exited state and the ground state . We consider the system operators
| (7) |
where , , and are the Pauli matrices. rotates the state vector along the axis with frequency and represents the rotation error with strength . In addition, we choose the initial state and the target state as and , respectively. In this setting, by solving the equation under , we can obtain the exact driving time . Thus, the lower bound is calculated as follows:
| (8) |
where has the meaning if . Figure 1 (a) shows the plots of and as a function of when is fixed. When is small, works as a tight bound, but as increases, its tightness becomes weak. This fact suggests that we should use when is small compared to .
For the same setup , we next consider the time-dependent rotation error modeled by
| (9) |
which is known as a typical control error in quantum computing science. represents the rotation frequency and . In this case, the lower bound is given by the same expression as (8) and we find that the difference between and is bigger than that of Fig. 1(a) [Fig. 1(b)]. Thereby, we can infer that our bound is more effective for errors with simple structures than for the one with complicated structures.
III.2 Two-qubit
Next, we study the two-qubit system; let us focus on the SWAP operation:
| (10) |
where is the SWAP gate
| (15) |
It exchanges the states of qubits 1 and 2 and plays an important role in quantum information scenario such as quantum Fourier transform (QFT) [1]. is generated by the time-independent Hamiltonian
| (16) |
Assume that the initial state is a product state and the target state is
| (17) |
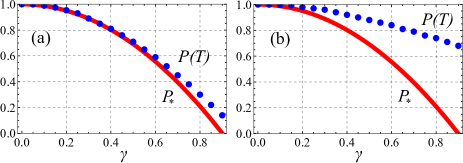
Then, the control time is calculated as . Here we focus on the two types of control errors;
| (18) | |||||
| (19) |
is a global error acting on the both atoms simultaneously. On the other hand, is a collective error acting on the each atoms, respectively. Now, to make the expression of same for and , we set . Then, we have the following lower bound:
| (20) |
Notably, as depicted in Fig. 2(a), gives a much tighter bound for the simulated values of . This is thought to be because the error is included in , resulting in too much control. Meanwhile, is clearly weak compared than . As shown in this example, there is the case where functions as a powerful tool for evaluating control performance.
IV Application for quantum protocol
Lastly, we apply our theorem to quantum protocols, where the computing time is given by a square root of the system size as . First, as a simple discussion, we set the final overlap to be
| (21) |
where . From , is upper bounded as
| (22) |
Generally, the system size is sufficiently large, and then, it is necessary to keep the noise strength very small as in order to achieve high fidelity. Therefore, when dealing with a large-scale system, powerful techniques for error suppression are required.
As a slightly more concrete example, we consider a quantum search algorithm with control errors. We aim to find the target state in an unsorted database set of orthogonal states . Let us approximately write the target state as
| (23) |
and further write the another state as
| (24) |
What we want to know here is how close the actually obtained state is to the target state. This problem can be solved by finding a fundamental bound for the probability amplitude .
For simplicity, we set ; then, . In this setting, we can calculate the upper bound of :
| (25) | |||||
where we used the triangle inequality in the first and second inequality, and the Cauchy-Schwarz inequality in the third inequality. Combining it and , we obtain the lower bound of :
| (26) |
If and are satisfied, the probability amplitude is bounded as
| (27) |
Therefore, the probability for getting the target item is exponentially estimated from below.
V Conclusion
In this paper, we have investigated the effect of deterministic control errors in isolated quantum dynamics, by deriving the lower bound for the overlap between two time-evolved states with ideal dynamics and noisy dynamics. Note that this bound gives a sharper estimation on the achievement of quantum preparation in some cases. Furthermore, by using the lower bound, we have given a limit on the probability for getting the target state under control errors. Finally, we would like to point out that any assumption is not imposed on the time evolution considered in this paper. Therefore, a future work is to apply our approach to practical quantum protocol such as shortcuts to adiabaticity [17, 18].
Acknowledgements.
This work was supported by MEXT Quantum Leap Flagship Program Grant JPMXS0120351339.Appendix A Derivation of
From Eqs. (1) and (2), we have
| (28) | |||||
Next we consider
| (29) | |||||
Substituting (28) into (29) and using the fact that is a real number because is Hermitian,
| (30) | |||||
where is the largest eigenvalue of .
Then, by integrating this inequality from to , we have
| (33) |
where we define and time-average . This result gives a meaningful upper bound only if . Furthermore, we calculate the lefthand side of (A6) as follows:
| (34) | |||||
Appendix B Generalization of the bound
We consider a time evolution subjected to the multiple control errors:
| (36) |
Using the result in Appendix A, we can derive the lower bound in the same manner:
| (37) | |||||
and
| (38) | |||||
Therefore, we have
| (39) |
and we obtain the following lower bound:
| (40) |
References
- [1] M. A. Nielsen and I. L. Chuang, Quantum Computation and Quantum Information (Cambridge University Press, Cambridge, 2010).
- [2] T. Kadowaki and H. Nishimori, Quantum annealing in the transverse Ising model, Phys. Rev. E 58, 5355 (1998).
- [3] J. Brooke, D. Bitko, T. F. Rosenbaum, and G. Aeppli, Quantum Annealing of a Disordered Magnet, Science 284, 779 (1999).
- [4] J. Brooke, T. F. Rosenbaum, and G. Aeppli, Tunable Quantum Tunneling of Magnetic Domain Walls, Nature 413, 610 (2001).
- [5] G. E. Santro, R. Martonak, E. Tossati, and R. Car, Theory of Quantum Annealing of an Ising Spin Glass, Science 295, 2427 (2002).
- [6] L. K. Grover, Quantum Mechanics Helps in Searching for a Needle in a Haystack, Phys. Rev. Lett. 79, 325 (1997).
- [7] J. Roland and N. J. Cerf, Quantum search by local adiabatic evolution, Phys. Rev. A 65, 042308 (2002).
- [8] D. Aharonov, W. van Dam, J. Kempe, Z. Landau, S. Lloyd, O. Regev, Adiabatic Quantum Computation is Equivalent to Standard Quantum Computation, SIAM J. Comput. 37, 166 (2007).
- [9] A. Mizel, D. A. Lidar, and M. Mitchell, Simple Proof of Equivalence between Adiabatic Quantum Computation and the Circuit Model, Phys. Rev. Lett. 99, 070502 (2007).
- [10] M. Okuyama, K. Ohki, and M. Ohzeki, Threshold theorem in isolated quantum dynamics with stochastic control errors, Phil. Trans. R. Soc. A. 381, 20210412 (2022).
- [11] K. Kobayashi, Control limit for the quantum state preparation under stochastic control errors, Proc. Roy. Soc. A 479, 2277 (2023).
- [12] J. Roland and N. J. Cerf, Noise resistance of adiabatic quantum computation using random matrix theory, Phys, Rev. A 71, 032330 (2005).
- [13] S. Mandra, G. Guerreschi, A. A.-Guzik, Adiabatic quantum optimization in the presence of discrete noise: Reducing the problem dimensionality, Phys. Rev. A 92, 062320 (2015).
- [14] S. Muthukrishnan, T. Albash, and D. A. Lidar, Sensitivity of quantum speedup by quantum annealing to a noisy oracle, Phys. Rev. A 99, 032324 (2019).
- [15] T. Albash, V. M-Mayor, T. Hen, Analog errors in ising machines. Quant. Sci. Technol. 4, 02LT03 (2019).
- [16] T. D. Kieu, Proc. Roy. Soc. A, 475, 20190148 (2019).
- [17] M. Demirplak and S. A. Rice, Adiabatic Population Transfer with Control Fields, J. Phys. Chem. A 107, 9937–9945 (2003).
- [18] X. Chen, A. Ruschhaupt, S. Schmidt, A. del Campo, D. G.-Odelin, and J. G. Muga, Fast Optimal Frictionless Atom Cooling in Harmonic Traps: Shortcut to Adiabaticity, Phys. Rev. Lett. 104, 063002 (2010).