An Inverse Boundary Value Problem arising in Nonlinear Acoustics
Abstract.
We consider an inverse problem arising in nonlinear ultrasound imaging. The propagation of ultrasound waves is modeled by a quasilinear wave equation. We make measurements at the boundary of the medium encoded in the Dirichlet-to-Neumann map, and we show that these measurements determine the nonlinearity.
1. Introduction
Nonlinear ultrasound waves are widely used in medical imaging, since the propagation of high-intensity ultrasound is not adequately modeled by linear acoustic equations, see [34]. It has many applications in diagnostic and therapeutic medicine, for example, the probe of tissues, the visualization of blood flow, and the potential application in monitoring patients in the operating room. For more details and other applications, see [2, 3, 17, 18, 21, 22, 20, 26, 27, 50, 52, 54, 55, 64].
We consider a bounded domain with smooth boundary. Let and be the sound speed. Let denote the pressure field of the ultrasound waves. A model for the pressure field in the medium with no memory terms is given by (see [35])
| (1) | ||||||
where is the insonation profile on the boundary and is the nonlinear term modeling the nonlinear interaction of the waves.
When , this equation is called the Westervelt equation. In this case, the inverse problem of recovering from some measurements of the waves is studied in [36, 1]. The Westervelt equation can be regarded as a lower order approximation to the more complicated physical model (1). In [35], an inverse problem modeled by (1) with a more general nonlinear term given by
| (2) |
is considered. In this paper, we study the inverse boundary value problem of recovering the general nonlinear term of the form (2) from the boundary measurements , where is the Dirichlet-to-Neumann (DN) map given by
with as the outer unit normal vector to . We additionally assume that is analytic in and has the expansion
with smooth. Then we can rewrite it as
where is smooth. More generally, our method works for the case when the nonlinear coefficient depends on both and , i.e., we consider the nonlinear term
| (3) |
We make the assumption that
| (A) |
1.1. Main Results.
We use the notation and in some cases for convenience. Consider the Riemannian metric
| (4) |
w.r.t. the wave speed on .
Assumption 1.
Suppose the Riemannian manifold is nontrapping and is strictly convex w.r.t. . By nontrapping, we mean there exists such that
First suppose that each is independent of and the sound speed is smooth and known. We have the following result.
Theorem 1.1.
Let satisfy Assumption 1. Consider the nonlinear wave equation
where the nonlinear term depending on smoothly has the expansion
and satisfies the assumption (A) for each . Let be the solutions corresponding to , for . If the Dirichlet-to-Neumann maps satisfy
for all in a small neighborhood of the zero functions in , then , for any and .
If the wave speed is unknown, one can recover it from the first order linearization of the DN map, i.e., the DN map for the linear problem, assuming it is smooth, see [9]. For the stable recovery with partial data, see [51]. After recovering , one can recover for by Theorem 1.1. This gives the following result.
Theorem 1.2.
For , suppose the wave speeds are smooth. Let be the Riemannian metrics corresponding to , see (4). Suppose satisfy Assumption 1. Consider the nonlinear wave equations
where the nonlinear terms depending on smoothly have the expansion
and satisfy the assumption in (A) for each . If the Dirichlet-to-Neumann maps satisfy
for all in a small neighborhood of the zero functions in , then and , for any and .
The result in Theorem 1.1 can be regarded as an example of a more general setting. Recall and let be the interior of . The linear part of the equation in (1) corresponds to the Lorentzian metric
and one denote
Strictly speaking, the operator is not the Laplace-Beltrami operator but it has the same principal symbol as . More generally, we can assume the smooth speed depends on as well.
Note that is a globally hyperbolic Lorentzian manifold with timelike boundary . Additionally, we assume is null-convex. Here is null-convex if for any null vector one has
| (5) |
where we denote by the outward pointing unit normal vector field on . This is true especially when is convex w.r.t . In the following, we consider a globally hyperbolic Lorentzian manifold with timelike and null-convex boundary.
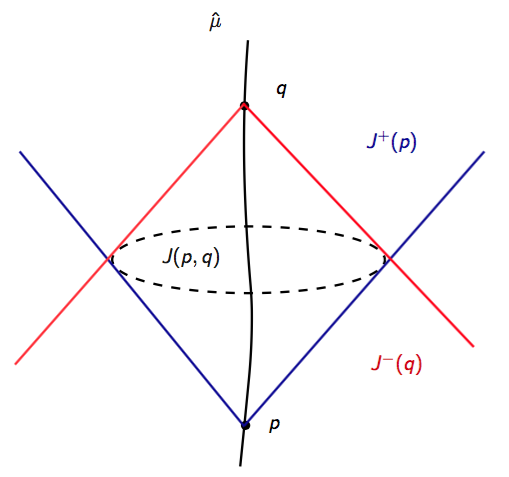
We first introduce some definitions to state the main results. A smooth path is timelike if for any . It is causal if and for any . For , we denote by (or ) if and there is a future pointing casual (or timelike) curve from to . We denote by if either or . The chronological future of is the set and the causal future of is the set . Similarly we can define the chronological past and the causal past . For convenience, we use the notation to denote the diamond set and to denote the set , see Figure 1.
We consider the recovery of the nonlinear coefficients in a suitable larger set
Theorem 1.3.
Let be a bounded domain with smooth boundary in . Let and with for any . Suppose the globally hyperbolic Lorentzian manifold has timelike and null-convex boundary. We define the wave operator
Consider the nonlinear wave equation
where the nonlinear terms depending on smoothly have the expansions
and satisfy the assumption in (A) for each . If the Dirichlet-to-Neumann maps satisfy
for all functions in a small neighborhood of the zero functions in , then for any and .
When is unknown, the problem of recovering from the DN map for the linear problem is still open in general. This theorem shows the unique recovery of the nonlinear term from the DN map under our assumptions, when the sound speed is known. We remark that the same result holds if we consider the metric and replace by the operator , where is family of Riemannian metrics on smoothly depending on and is a first order linear differential operator. The inverse problems of recovering the metric and the nonlinear term for a semilinear wave equation were originated in [39] in a globally hyperbolic Lorentzian manifold without boundary. Starting with [39, 38], there are many works studying inverse problems for nonlinear hyperbolic equations, see [5, 7, 11, 12, 15, 16, 57, 23, 30, 37, 4, 40, 42, 56, 58, 29, 1, 60]. For an overview of the recent progress, see [41, 59].
The plan of this paper is as follows. In Section 2, we establish the well-posedness of the boundary value problems (1) for small boundary data. In Section 3, we present some preliminaries for Lorentzian geometry as well as microlocal analysis, construct the distorted planes waves, and derive the asymptotic expansion. We prove Proposition 2, which implies that Theorem 1.1 is a special case of Theorem 1.3. Therefore, in the rest of the paper the aim is to prove Theorem 1.3 using nonlinear interaction of distorted plane waves. In Section 4 and 5, we analyze the singularities produced by the nonlinear interaction of three and four distorted plane waves. Based on these results, we recover the lower order nonlinear coefficients from the fourth order linearization of the DN map in Section 6. The recovery is based on a special construction of lightlike covectors at each . In Section 7 and Section 8, we recover other nonlinear coefficients from the higher order linearization of the DN map, using Piriou conormal distributions.
2. Local well-posedness
The well-posedness of the boundary value problem (1) with small boundary data can be established by the same arguments as in [30], see also [1] and [61]. For completeness we present the proof below.
Let be fixed and let . Suppose satisfies , with small positive number to be specified later. Then there exists a function such that and
Let . We rewrite the nonlinear term as
| (6) | ||||
By the assumption (A), the functions are smooth functions over . Then must solve the system
| (7) |
For , we define as the set containing all functions such that
We abuse the notation to denote different constants that depends on . One can show the following claim by Sobolev Embedding Theorem, see also [61, Claim 3] and its proof.
Claim 1.
Suppose . Then and , . Moreover, we have the following estimates.
-
(1)
If , then .
-
(2)
If , then .
-
(3)
If , then .
For with to be specified later, we consider the linearized problem
and we define the solution operator which maps to the solution . By Claim 1 and (6), we have
According to [13, Theorem 3.1], the linearized problem has a unique solution
such that
where are positive constants. If we assume and are small enough, then the above inequality implies that
For any satisfying , we can choose such that
| (8) |
In this case, we have maps to itself.
In the following we show that is a contraction map if is small enough. It follows that the boundary value problem (7) has a unique solution as a fixed point of . Indeed, for with , we have that satisfies
We denote the right-hand side by and using Claim 1 for each term above, we have
where are chosen to be small enough. By [13, Theorem 3.1] and (8), one obtains
Thus, if we choose , then
shows that is a contraction. This proves that there exists a unique solution to the problem (7). Furthermore, by [13, Theorem 3.1] this solution satisfies the estimates Therefore, we prove the following proposition.
Proposition 1.
Let with . Suppose at . Then there exists small positive such that for any , we can find a unique solution
to the boundary value problem (1), which satisfies the estimate
for some independent of .
3. Preliminaries
3.1. Lorentzian manifolds
Recall is globally hyperbolic with timelike and null-convex boundary, where . As in [30], we extend smoothly to a slightly larger globally hyperbolic Lorentzian manifold without boundary, where such that is contained in the interior of the open set . Let
be the observation set. See also [61, Section 7] for more details about the extension. In the following, we abuse the notation and do not distinguish with if there is no confusion caused.
We recall some notations and preliminaries in [39]. For , the corresponding vector of is denoted by . The corresponding covector of a vector is denoted by . We denote by
the set of light-like vectors at and similarly by the set of light-like covectors. The sets of future (or past) light-like vectors are denoted by (or ), and those of future (or past) light-like covectors are denoted by (or ).
The characteristic set is the set , where is the principal symbol. It is also the set of light-like covectors with respect to . We denote by the null bicharacteristic of that contains , which is defined as the integral curve of the Hamiltonian vector field . Then a covector if and only if there is a light-like geodesic such that
Here we denote by the unique null geodesic starting from in the direction .
The time separation function between two points in is the supremum of the lengths
of the piecewise smooth causal paths from to . If is not true, we define . Note that satisfies the reverse triangle inequality
For , recall the cut locus function
where is the maximal time such that is defined. The cut locus function for past lightlike vector is defined dually with opposite time orientation, i.e.,
For convenience, we abuse the notation to denote if . By [8, Theorem 9.15], the first cut point is either the first conjugate point or the first point on where there is another different geodesic segment connecting and .
In particular, when , we have the following proposition, which implies Theorem 1.1 is the result of Theorem 1.3.
Proposition 2.
Proof.
For each , we consider a unit-speed geodesic in such that and there exists
We write . With (1), we can assume . There exists such that . First we consider
It follows that is a null geodesic in with . We set . Note that . Next, we consider
Similarly, is a null geodesic in with and . Therefore, we have , which implies . ∎
3.2. Distributions
Suppose is a conic Lagrangian submanifold in away from the zero section. We denote by the set of Lagrangian distributions in associated with of order . In local coordinates, a Lagrangian distribution can be written as an oscillatory integral and we regard its principal symbol, which is invariantly defined on with values in the half density bundle tensored with the Maslov bundle, as a function in the cotangent bundle. If is a conormal bundle of a submanifold of , i.e. , then such distributions are also called conormal distributions. The space of distributions in associated with two cleanly intersecting conic Lagrangian manifolds is denoted by . If , then one has and
away from their intersection . The principal symbol of on and can be defined accordingly and they satisfy some compatible conditions on the intersection.
3.3. The causal inverse
On a globally hyperbolic Lorentzian manifold , the wave operator with the principal symbol is normally hyperbolic, see [10, Section 1.5]. It has a unique casual inverse according to [10, Theorem 3.3.1]. By [47, Proposition 6.6], one can symbolically construct a parametrix , which is the solution operator to the wave equation
in the microlocal sense. It follows that up to a smoothing operator. We denote the kernel of by and it is a paired Lagrangian distribution in , where Diag denotes the diagonal in , is its conormal bundle, and is the flow out of under the Hamiltonian vector field . Here we construct the microlocal solution to the equation
using the proof of [47, Proposition 6.6], and the symbol of can be found during the construction there. In particular, the principal symbol of along satisfying is nonvanishing. The one along solves the transport equation
where is the Lie action of the Hamiltonian vector field and is the subprincipal symbol of . The initial condition is given by restricting to , see (6.7) and Section 4 in [47]. Then one can solve the transport equation by integrating along the bicharacteristics. This implies the solution to the transport equation is nonzero and therefore is nonvanishing. See also [14, 10, 25] for more references.
We have the following proposition according to [25, Proposition 2.1], see also [43, Proposition 2.1].
Proposition 3.
Let be a conic Lagrangian submanifold in . Suppose intersects transversally, such that its intersection with each bicharacteristics has finite many times. Then
where is the flow out of under the Hamiltonian flow. Moreover, for , we have
where the summation is over the points that lie on the bicharacteristics from .
3.4. Distorted plane waves.
We review the distorted plane waves constructed in [39]. Roughly speaking, they are conormal distributions propagating along the fixed null geodesic before the first cut point.
Let be a Riemannian metric on and be the bundle of future-pointing light-like vectors. For and a small parameter , we define
as a neighborhood of at the point . We denote by the unique null geodesic starting from with direction , and we define
as the subset of the light cone emanating from by light-like vectors in . As goes to zero, the surface tends to the geodesic . Consider the Lagrangian submanifold
which is a subset of the conormal bundle . We define
as the flow out from by the Hamiltonian vector field of in the future direction. Note that is the conormal bundle of near before the first cut point of .
Now suppose or is given. According to [39, Lemma 3.1], we can construct distributions
with nonzero principal symbol along for . Note that has no singularities conormal to . Thus its restriction to the submanifold is well-defined, see [31, Corollary 8.2.7]. Let and solve the boundary value problem
| (9) | ||||||
It follows that . We consider the boundary value problem (1) for the nonlinear wave equation with the Dirichlet boundary condition and write the solution to (1) as an asymptotic expansion with respect to later.
For , let be lightlike vectors. In some cases, we denote this triplet or quadruplet by . We omit the parameters and use the following notations
if there is no confusion. We say are causally independent if
| (10) |
Note the null geodesic starting from could never intersect or could enter more than once. Thus, we define
| (11) |
as the first time when it enters and the first time when it leaves from inside, if such limits exist.
We introduce the definition of the regular intersection of three or four null geodesics at a point , as in [39, Definition 3.2].
Definition 1.
Let or . We say the geodesics corresponding to intersect regularly at a point , if one has
-
(1)
there are such that , for ,
-
(2)
the vectors are linearly independent.
It is shown in [39, Lemma 3.5] that for any , there exists such that with . Moreover, in any neighborhood of , we can find lightlike vectors such that they are causally independent as in (10) and the four null geodesics corresponding to intersect regularly at . To determine the nonlinear terms at fixed point , in the following we focus on that are causally independent and intersect regularly at .
For convenience, we introduce the following definition on the intersection of three or four submanifolds as in [43, Definition 3.1].
Definition 2.
We say four codimension 1 submanifolds intersect 4-transversally if
-
(1)
intersect transversally at a codimension manifold , for ;
-
(2)
intersect at a codimension submanifold , for ;
-
(3)
intersect at a point ;
-
(4)
for any two disjoint index subsets , the intersection of and is transversal if not empty.
If satisfy condition (1) and (2), then we say they intersect 3-transversally.
By [43], such intersect at with linearly independent normal covectors , . These covectors form a basis for the cotangent space such that each has a unique decomposition with respect to them. Additionally, if four null geodesics intersect regularly at , then we can always construct with small enough such that they intersect 4-transversally at .
For convenience, we introduce the following notations
where is the intersection point in . We define
Then we denote the flow out of under the null bicharacteristics of in by
The flow out of under the broken bicharacteristic arcs of in is denoted by
see Section 3.5 for the broken characteristics and the definition of . Let
which depends on the parameter by definition. Then we define
| (12) |
as the set containing all possible singularities caused by the Hamiltonian flow and the interaction of at most three distorted plane waves.
As in [39], to deal with the complications caused by the cut points, for , we consider the interaction in the set
| (13) |
which is the complement of the causal future of the first cut points. In , any two of the null geodesics intersect at most once, by [8, Lemma 9.13].
To deal with the complications caused by the reflection part, for , we define
| (14) |
as the complement of the causal future of the point in , where leaves from the inside for the first time. Note that in , each null geodesic enters at most once and any two of them intersect at most once. Let be the interior of and let denote the permutation group of . In particular, assuming the four null geodesics intersect regularly at a point in , we can show the following lemma.
Lemma 1.
Suppose intersect regularly at . Let .
-
(a)
If for arbitrarily small , then .
-
(b)
For fixed , if with arbitrarily small , then .
Proof.
We prove by contradiction. For (a), assume . Then we can find such that is in their intersection. If , then by choosing small enough one has . This implies for some . In , we must have and . This contradicts with by [8, Lemma 9.13].
For (b), similarly we have otherwise for sufficiently small . Since , we have , if (b) is not true. It follows from that there exists such that . With , we must have since . Assume . Without loss of generosity, we can assume . Then there exists small enough such that , which contradicts with . It follows that , since is the only intersection point in by [8, Lemma 9.13]. Then one has , which is impossible. ∎
3.5. The solution operator
In this subsection, we present how the singularities propagate after applying , i.e., the solution operator to the boundary value problem
| (15) | ||||||
The similar analysis is in [61, Section 3.4].
We denote the outward (+) and inward (-) pointing tangent bundles by
| (16) |
where is the outward pointing unit normal of . For convenience, we also introduce the notation
| (17) |
to denote the lightlike covectors that are outward or inward pointing on the boundary.
First we recall some definitions and notations in [46, 45, 62, 32, 48] (see also [44, 53]). For a smooth manifold with boundary , let be the compressed cotangent bundle, see [48, Lemma 2.3]. There is a natural map
satisfying that it is the identity map in and for it has the kernel and the range identified with . Suppose locally is given by with and the one forms are given by . Then in local coordinates, takes the from
The compressed cotangent bundle can be decomposed into the elliptic, glancing, and hyperbolic sets by
Recall is the characteristic set of and we define its image
as the compressed bicharacteristic set. Obviously the set is a union of the glancing set and the hyperbolic set . If and , then is in . Let be the subset of containing such . Note can be identified with . If and , then is in the elliptic set .
The glancing set on the boundary is the set of all points such that and the Hamilton vector field of is tangent to at . We define as the subset where is tangent to with the order less than , for , see [46, (3.2)] and [32, Definiton 24.3.2]. Note that . In particular, we denote by the subset with infinite order of bicharacteristic tangency. The subset is the union of the diffractive part and the gliding part depending on whether or .
Next we are ready to define the generalized broken bicharacteristic of , see [46, 45, 32] and [62, Definition 1.1].
Definition 3 ([32, Definition 24.3.7]).
Let be an open interval and is a discrete subset. A generalized broken bicharacteristic arc of is a map satisfying the following properties:
-
(1)
is differentiable and , if
-
(2)
is differentiable and , if , see [32, Definition 24.3.6] for the vector field ,
-
(3)
every is isolated, and if is small enough and . The limits exist and are different points in the same fiber of .
The continuous curve obtained by mapping into by is called a generalized broken bicharacteristic.
If is a generalized bicharacteristic arc contained in , then we call it a broken bicharacteristic arc, see [32, Definiton 24.2.2], which is roughly speaking the union of bicharacteristics of over with reflection points on the boundary. By the definition, a broken bicharacteristic arc arrives transversally to at and then leaves the boundary transversally from the reflected point , with the same projection in . The image of such under is called a broken bicharacteristic.
In this paper, with the assumption that is null-convex, the generalized broken bicharacteristics we consider in Section 4 and 5 are contained in , and therefore are all broken bicharacteristics. We denote the broken bicharacteristic arc of that contains the covector by . According to [32, Corollary 24.3.10], the arc is unique for each . The following lemma shows that with proper assumptions on the boundary, a generalized bicharacteristics passing a point in is always contained in , i.e., is always a broken bicharacteristic.
Lemma 2.
Let be a Lorentzian manifold with timelike boundary . Suppose is null-convex, see (5). If is a future pointing generalized bicharacteristic with , then and therefore it is a future pointing broken characteristic.
Proof.
If , then there are two different points in . In this case suppose such that . By Definition 3, the generalized bicharacteristic arc of has and . It leaves transversally after and one has for small enough positive .
Now we consider the second case where . The generalized bicharacteristic arc of has and therefore near it is the null bicharacteristic of . Let be the natural projection. Then near is a light-like geodesic in . If hits the boundary at , then by [28, Proposition 2.4] the null-convex boundary implies that the intersection is transversal with the tangent vector such that . Let and it follows that and . Thus, and we arrive at the first case.
Combining the two cases, we have is always contained in . ∎
Let be the set of distributions supported in . The boundary wave front set of a distribution is defined by
where the intersection takes for any properly supported and . Here is the set of b-pseudodifferential operators on of order zero, for more details see [32, Definition 18.3.18]. The set contains distributions that are smooth in and have tangential smoothness at , where denotes the class of conormal distributions on of order . Note that away from the boundary it coincides with the usual definition of wave from set, i.e. . We present the result about the singularities of solutions to the boundary value problem (15) in the following proposition according to [46, 45], [62, Theorem 8.1], and [32].
Proposition 4.
Let and be the solution to the boundary value problem (15) in . Then
is a union of maximally extended generalized characteristics of .
Combining this proposition and Lemma 2, we have the following corollary.
Corollary 1.
In particular, if is timelike and null-convex with contained in , then
and is a union of broken bicharacteristics.
3.6. The asymptotic expansion
Let , where or . The small boundary data are properly chosen as before. Let solve the boundary value problem (9) and recall we write if solves the boundary value problem (15).
Let and by (1) we have
It follows from (3) that
| (18) |
where we write the term by the order of -terms, such that denotes the terms with , denotes the terms with , and denotes the terms with , for . By (3.6), one can find the expansions of as
For , we can write
where contains the terms involved only with . Note that appears times in each , . Therefore, we introduce the notation to denote the result if we replace by in in order, and similarly the notations , , such that
More explicitly, we have
| (19) | ||||
4. The nonlinear interaction of three waves
In this section, we consider the interaction of three distorted plane waves. Suppose intersect regularly at and are casually independent as in (10). Let and be defined as in Section 3.4. With sufficiently small , we can assume the submanifolds intersect 3-transversally, i.e.,
-
(1)
and intersect transversally at a codimension submanifold , for ;
-
(2)
intersect transversally at a codimension submanifold .
By Lemma 1, in , one has with sufficiently small , and therefore for .
Recall we can construct distorted waves associated with such that
solves the linearized wave problem in , i.e., , with the principal symbol nonvanishing along . Let and as the Dirichlet data for (1). Suppose solves (9). It follows that is equal to module . We define
and combine (3.6), (19) to have
Note that is not the third order linearization of but they are related by
| (20) |
As in [30], we introduce the trace operator on . It is an FIO and maps distributions in whose singularities are away from to , see [19, Section 5.1]. Notice for any timelike covector , there is exactly one outward pointing lightlike covector and one inward pointing lightlike covector satisfying . The trace operator has a nonzero principal symbol at such or .
We emphasize that and we can always identify it as en element of . Particularly in , it can be identified as a conormal distribution in . Note that or has singularities away from , since we have . Then we use Proposition 4 and its corollary to analyze the singularities of or . This is the same argument we use in [61, Section 4, 5]. We present the proof in the following for completeness.
4.1. The analysis of
First we analyze the singularities of
By [43, Lemma 3.3] and [63, Lemma 4.1], one has
In the following, let and we write , for . With intersecting transversally, any has a unique decomposition . Away from and , the principal symbol of equals to
at .
Note that is also a distribution supported in . Its boundary wave front set is contained in and thus as a subset of . Then by Proposition 4 and its corollary, the set is contained in the union of and their flow out under the broken bicharacteristics. We notice that away from and , there are no new singularities produced by the flow out.
In , we identify by , the causal inverse of on , to have
by [43, Lemma 3.4]. Here we regard the restriction of to as a distribution in . Additionally, at away from and , the principal symbol equals to
4.2. The analysis of
Recall
The following proposition describes the singularities of produced by three waves interaction.
Proposition 5.
Proof.
We write , where
In the following, let and with . The transversal intersection implies the decomposition of is unique.
For , since we are away from and , first one can write using [43, Lemma 3.6], where
| (22) | ||||
The leading term has principal symbol
Next, we apply to respectively. The wave front sets remain the same and we have with
| (23) |
Then, we apply . By Proposition 4 and its corollary, the set is a union of and its flow out under the broken bicharacteristics. For this first term, it follows that
To find its principal symbol, we decompose it as , where is the incident wave before the reflection on the boundary and is the reflected one. Recall is the causal inverse of on . Then and by [25, Proposition 2.1] we have
| (24) |
The principal symbol at equals to
| (25) |
If lies along the forward null-bicharacteristic starting from , then belongs to and is the first point there to hit the boundary. The principal symbol of at is
| (26) |
Near , the reflected wave satisfies
where the second equation comes from the Dirichlet boundary condition. In a small conic neighborhood of , we write
for , with suitable amplitude satisfying the transport equation and the phase functions satisfying the eikonal equation. Note that near , since the incident wave is the incoming solution and the reflected wave is the outgoing one. The Dirichlet boundary condition implies near . In local coordinates, if we omit the half-density factor, then we have
where and is the projection of the lightlike covector on the boundary. It follows that
and therefore
| (27) | ||||
where the last equality is by [63, Lemma 4.1].
For , first we identify as an element in . Its boundary wave front set in is a subset of . Then is contained in the union of this set and its flow out under broken bicharacteristics, i.e. , away from . When goes to zero, the boundary wave front set tends to .
For , the boundary wave front set of in is a subset of . Then is contained in the union of this set and its flow out under the broken bicharacteristics, i.e., , away from .
Thus, we write with
where the first two terms come from applying [43, Lemma 3.9] to (24). Indeed, [43, Lemma 3.9] implies that we can decompose (24) as a conormal distribution supported in and a distribution microlocally supported in . Since in (24) has wave front set contained in , the second distribution in the decomposition must be microlocally supported in . Then we include the wave front set after hits the boundary for the first time to have in (21).
For , note that it has the same pattern as . In this case, the leading term in (22) is a conormal distribution in , with principal symbol
| (28) |
at . We apply to have with
| (29) |
Then we apply and follow the same analysis as above.
Combining the analysis of and , we conclude that we can write with satisfying (21) for . In particular, the leading term has principal symbol at given by
| (30) | ||||
5. The nonlinear interaction of four waves
In this section, we consider the interaction of four distorted plane waves. Suppose intersect regularly at and are casually independent as in (10). Let and be defined as in Section 3.4. With sufficiently small , we can assume intersect 4-transversally at , see Definition 2. By Lemma 1, in we must have and contained in , if is small enough. We consider distorted waves associated with such that
solves the linearized wave problem in , i.e., , with the principal symbol nonvanishing along . Let and we consider the Dirichlet data for the semilinear boundary value problem (1). Suppose solves (9). It follows that is equal to module . We define
and combine (3.6), (19) to have
| (32) | ||||
Note that is not the fourth order linearization of but they are related by
| (33) |
The following proposition describes the singularities of and those of the linearized DN map.
Proposition 6.
Proof.
There are four different of terms for , see (32). We denote them by , for , and analyze each of them. Then we compute the principal symbol of in , following the same arguments in [61, Section 5]. We write down these arguments below for completeness.
In the following, let with and with . The transversal intersection implies the decomposition of is unique.
First, we consider
With the decomposition of given in (21), we analyze the singularities of for in the following and then apply the solution operator to each of them. Here we replace the notation by in the decomposition.
Since , by [43, Lemma 3.10] and [63, Lemma 4.1], one can write , where
The leading term has the principal symbol
at , where by (30) we have
| (34) |
Then we apply to and Proposition 4 with its corollary implies
To find the principal symbol, we decompose it as as before, where is the incident wave before the reflection and is the reflected one. For more details, see the proof of Proposition 5. Similarly, we have
If lies along the forward null-bicharacteristic starting at , then it belongs to and is the first point where touches the boundary. The same argument shows that
when is away from .
For , away from , the flow out of under the broken bicharacteristic arcs is a neighborhood of , and it tends to when goes to zero. Similarly, the flow out of under the broken bicharacteristic arcs tends to as goes to .
For , we use [61, Lemma 6] to show its boundary wave front set tends to a subset of , as goes to zero. Here it suffices for us to verify the intersection of and is in , by Lemma 1. For , the same argument in [61, Lemma 6] with Lemma 1 works and its boundary wave front set tends to a subset of , as goes to zero. For , we use the same argument as in [43, Propostion 3.11] to conclude its boundary wave front set tends to a subset of as goes to zero.
We emphasize that all the analysis above happens in the set with sufficiently small . To summarize, the distribution does not have new singularities other than those in
Therefore, away from , one has
| (35) | ||||
Next, recall . Away from , we have
The same analysis as in [39, 43, 63] applies to . Indeed, by [43, Lemma 3.8], one has
where
The principal symbol of is
with
| (36) |
The same argument as before show that
and tends to a subset of when goes to zero. To find the principal symbol of the leading term , we decompose it as as before. Then the same argument shows that if is away from and lies along the forward null-bicharacteristic starting from , then we have
| (37) | ||||
Third, recall . By the proof of [43, Proposition 3.11], see also [43, Lemma 3.6, Lemma 3.10], one has
where
The principal symbol for the leading term is
with
| (38) |
The same argument shows that if is away from and lies along the forward null-bicharacteristic starting from , then we have
| (39) | ||||
where is the projection of .
Fourth, recall . By [43, Lemma 3.8], we write
where
In this case, the principal symbol for the leading term is
with
| (40) |
The same argument shows that if is away from and lies along the forward null-bicharacteristic starting from , then we have
| (41) | ||||
where is the projection of .
Thus, from the analysis above, we combine (35), (37), (39), (41) to have
where
| (42) | ||||
with defined in (34), (36), (38), (40) for . By (33), we have
∎
6. The recovery of lower order nonlinear terms
For , let solve the boundary value problem (1) with nonlinear terms that have the expansion in (3), i.e.,
and satisfy the assumption (A). We suppose
for small boundary data supported in . In this section, we consider the recovery of at points in the suitable larger set
from the fourth order linearization of the DN map. For convenience, we denote them by lower order nonlinear terms.
Let be fixed. We denote by
a conic neighborhood of a fixed covector with small parameter . Similarly, we denote the -neighborhood for a fixed lightlike vector by . First, we show that with given, one can perturb a little bit to choose lightlike vectors such that are linearly independent and are corresponding to null geodesic segments without cut points. For convenience, we form the lemma below based on the proof of [39, Lemma 3.5].
Lemma 3.
Let and . Suppose there is with and . Then we can find such that for any , there exists a vector with and . Moreover, one has and are causally independent.
Proof.
First set . Note that the geodesic have no cut points for , which implies .
We consider all the null geodesics that emanate from in the lightlike direction of , where with to be specified later. By [8, Theorem 9.33], the cut locus function is lower semi-continuous on a globally hyperbolic Lorentzian manifold. It follows that there is such that for any . Next, to find for such , let be the intersection points of with the Cauchy surface , where t is the time function on . Indeed, the first cut point comes at or before the first conjugate point along . This implies the exponential map is a local diffeomorphism near , which maps a small neighborhood of to a small neighborhood of . For close enough to , there exist and with , for sufficiently small . Here t is the time function. This proves the statement. ∎
Now we claim that for any fixed and sufficiently small one can find
such that
-
(a)
intersect regularly at and are causally independent, see (10),
-
(b)
each hits exactly once and transversally before it passes ,
-
(c)
lies in the bicharacteristic from and additionally there are no cut points along from to .
Indeed, by [39, Lemma 3.1], first we pick and in such that there exist and with
for some and . Next by Lemma 3, one can find such three more covectors with for at such that satisfy the condition (a). To have (b), we can always replace by for some if necessary. Then by [28, Lemma 2.4], the null geodesic always hit transversally before it passes . To have (c), recall we have found with for some . We define
Note that . In addition, the null geodesic hit transversally at . Thus, and (c) is true for .
Moreover, we show in Lemma 3 that with given, we have freedom to choose , as long as they are from sufficiently small perturbations of . In Lemma 4 below, we would like to choose special such that we can determine the lower order nonlinear terms from a nondegenerate linear system. Before that, with the construction above, we can apply Proposition 6 to have
where is defined in (42) with replaced by for . In the following, we use the notations
The above analysis shows that from the fourth order linearization of the DN map, one has
where we write and to denote and .
Lemma 4.
For fixed and , we can find three different sets of nonzero lightlike covectors
such that with for some and the vectors
are linearly independent.
This implies that we can solve from a nondegenerate linear system.
Proof.
We choose local coordinates at such that coincides with the Mankowski metric. By rotating the coordinate system in the spatial variable, without loss of generality, we can assume
where . For sufficiently small, we choose
Then we have , where we set with
One can compute
Note . We compute
which implies
It follows that
where we write and compute
Here we expand each term according to the order of , in order to analyze its behavior near . If we further write
then using Mathematica codes, we have
Plugging it back, we have
It follows that
Since for we have
then
We compute
This implies that
Then we have
Thus, one has
| (43) |
Next, we compute
We have
where
and
and
It follows that
Then we have
| (44) |
Combining (44) and (6), we have
| (45) |
We claim that there exist sufficiently small such that
are linearly independent. Indeed, we define
The analysis above shows that for small enough. In the following, we would like to find in a small neighborhood of , such that the determinant does not vanish, i.e.,
For simplification, we write and for . We compute
We choose sufficiently small with for small parameter . Recall . By (6) and (45), one has
This implies that
Thus, we have
for sufficiently small and . This proves the desired result. ∎
Thus, combining Lemma 3, Lemma 4, and Proposition 6, we can choose three different sets
such that from
we can conclude that
Here we write and . It follows that
at . In the case that does not vanish, we conclude that . Otherwise, if , one can use the third order linearization
to show that . More explicitly, by Proposition 5 and a similar construction of in [30], we have
In both cases, we have
at any .
7. Piriou Conormal distributions
In the following, we introduce Piriou Conormal distributions. In Section 8, we determine at each from the singularities of the th order linearization of the DN map by using this special class of conormal distributions.
Let be a submanifold of with . We follow [49] to define the class of conormal distributions that vanish to certain order at . Note the order of conormal distributions in [49] is the same as that of symbols and we shift it by following the definition in [32].
Definition 4.
Let and such that . We say if vanishing to order at .
By [49, Propostion 2.3 and 2.4], a distribution if and only if there exists vanishing to order such that with , for . Additionally, by [6], for any with compact support, by subtracting a compactly supported smooth function whose derivatives at up to order coincide with those of , one can modify such that . This can be done since we can show that is continuous up to order at , for .
Lemma 5 ([6, Proposition 2.4]).
Let and . Then there exists such that with .
Lemma 6.
Let with . Suppose . Then
with the principal symbol given by -fold fiberwise convolution
Now we can prove the following lemma about .
Lemma 7.
Let with . Suppose intersect 4-transversally at a point . Suppose and for . Let . Then microlocally away from , we have
Moreover, for , the principal symbol is given by
| (46) |
where the decomposition with is unique. Note that is given by the -fold fiberwise convolution in Lemma 6.
Lemma 8.
Suppose intersect 4-transversally at a point . Let be defined in (12). Let and for . Suppose is a covector lying along the forward null-bicharacteristic of starting at . If is contained in and away from , then with sufficiently small we have
where the decomposition with is unique. Note the homogeneous term is given by the -fold fiberwise convolution in Lemma 6.
8. Recovery of the higher order nonlinearity
For , let solve the boundary value problem (1) with nonlinear terms that satisfies the expansion in (3), i.e.,
Suppose
for small boundary data supported in . In this section, we consider the recovery of in the suitable larger set
from the -th order linearization of the DN map. For convenience, we denote them by higher order nonlinear terms. The analysis in Section 6 shows one can recover from the fourth order linearization.
For fixed , we consider the same construction as in Section 6, i.e.,
such that
-
(a)
intersect regularly at and are causally independent, see (10),
-
(b)
each hits exactly once and transversally before it passes ,
-
(c)
lies in the bicharacteristic from and additionally there are no cut points along from to .
For satisfying the conditions above, we construct and define
where solves the boundary value problem (1). In particular, we choose as in Section 7. We write
where
and contains the terms involved with , see Section 3.6.
We note that one has
In the following we use an induction procedure to determine . Assuming has been determined for , we subtract the contribution of to obtain that
| (47) |
For , we compute
By Lemma 8, it has the principal symbol
| (48) | ||||
at , where is chosen as above. We note that
where is the projection of on the boundary. Therefore, combining equations (47) and (48), at any we must have
Acknowledgment
We would like to thank Katya Krupchyk for mentioning the paper [35]. The research of G.U. is partially supported by NSF, a Walker Professorship at UW, a Si-Yuan Professorship at IAS, HKUST, and a Simons Fellowship. Part of this research was performed while G.U. and Y.Z. were visiting the Institute for Pure and Applied Mathematics (IPAM), which is supported by the National Science Foundation (Grant No. DMS-1925919). Y.Z. was also partially supported by a Simons Travel Grant.
References
- [1] Sebastian Acosta, Gunther Uhlmann, and Jian Zhai. Nonlinear ultrasound imaging modeled by a Westervelt equation. to appear SIAM J. Appl. Math. arXiv:2105.05423.
- [2] Arash Anvari, Flemming Forsberg, and Anthony E. Samir. A primer on the physical principles of tissue harmonic imaging. RadioGraphics, 35(7):1955–1964, 2015.
- [3] Jean-François Aubry and Mickael Tanter. MR-guided transcranial focused ultrasound. In Advances in Experimental Medicine and Biology, pages 97–111. Springer International Publishing, 2016.
- [4] Tracey Balehowsky, Antti Kujanpää, Matti Lassas, and Tony Liimatainen. An inverse problem for the relativistic Boltzmann equation. arXiv:2011.09312, 2020.
- [5] Antônio Sá Barreto and Plamen Stefanov. Recovery of a cubic non-linearity in the wave equation in the weakly non-linear regime. To appear in Communications in Mathematical Physics, arXiv:2102.06323, 2021.
- [6] Antônio Sá Barreto and Yiran Wang. Singularities generated by the triple interaction of semilinear conormal waves. Analysis & PDE, 14(1):135–170, 2021.
- [7] Antônio Sá Barreto, Gunther Uhlmann, and Yiran Wang. Inverse scattering for critical semilinear wave equations. To appear in Pure and Applied Analysis, arXiv:2003.03822, 2020.
- [8] John Beem. Global Lorentzian Geometry, Second Edition. CRC Press, London, 2017.
- [9] M. I. Belishev. An approach to multidimensional inverse problems for the wave equation. Dokl. Akad. Nauk SSSR, 297(3):524–527, 1987.
- [10] Christian Bär, Nicolas Ginoux, and Frank Pfäffle. Wave Equations on Lorentzian Manifolds and Quantization. European Mathematical Society Publishing House, 2007.
- [11] Xi Chen, Matti Lassas, Lauri Oksanen, and Gabriel P Paternain. Detection of Hermitian connections in wave equations with cubic non-linearity. Journal of the European Mathematical Society, 2021.
- [12] Xi Chen, Matti Lassas, Lauri Oksanen, and Gabriel P. Paternain. Inverse problem for the Yang–Mills equations. Communications in Mathematical Physics, 384(2):1187–1225, 2021.
- [13] Constantine M. Dafermos and William J. Hrusa. Energy methods for quasilinear hyperbolic initial-boundary value problems. applications to elastodynamics. Archive for Rational Mechanics and Analysis, 87(3):267–292, 1985.
- [14] Maarten de Hoop, Gunther Uhlmann, and András Vasy. Diffraction from conormal singularities. Annales Scientifiques de l'École Normale Supérieure, 48(2):351–408, 2015.
- [15] Maarten de Hoop, Gunther Uhlmann, and Yiran Wang. Nonlinear interaction of waves in elastodynamics and an inverse problem. Mathematische Annalen, 376(1-2):765–795, 2019.
- [16] Maarten de Hoop, Gunther Uhlmann, and Yiran Wang. Nonlinear responses from the interaction of two progressing waves at an interface. Annales de l'Institut Henri Poincaré C, Analyse Non Linéaire, 36(2):347–363, 2019.
- [17] L. Demi and M.D. Verweij. Nonlinear acoustics. In Comprehensive Biomedical Physics, pages 387–399. Elsevier, 2014.
- [18] M. Demi. The basics of ultrasound. In Comprehensive Biomedical Physics, pages 297–322. Elsevier, 2014.
- [19] J. J. Duistermaat. Fourier Integral Operators. Springer Basel AG, 2010.
- [20] Gaynor et al. Neurodevelopmental outcomes after cardiac surgery in infancy. Pediatrics, 135(5):816–825, 2015.
- [21] Jens Eyding, Christian Fung, Wolf-Dirk Niesen, and Christos Krogias. Twenty years of cerebral ultrasound perfusion imaging—is the best yet to come? Journal of Clinical Medicine, 9(3):816, 2020.
- [22] Amy Fang, Kiona Y. Allen, Bradley S. Marino, and Ken M. Brady. Neurologic outcomes after heart surgery. Pediatric Anesthesia, 29(11):1086–1093, 2019.
- [23] Ali Feizmohammadi and Lauri Oksanen. Recovery of zeroth order coefficients in non-linear wave equations. Journal of the Institute of Mathematics of Jussieu, pages 1–27, 2020.
- [24] Allan Greenleaf and Gunther Uhlmann. Estimates for singular Radon transforms and pseudodifferential operators with singular symbols. Journal of Functional Analysis, 89(1):202–232, 1990.
- [25] Allan Greenleaf and Gunther Uhlmann. Recovering singularities of a potential from singularities of scattering data. Communications in Mathematical Physics, 157(3):549–572, 1993.
- [26] J. U. Harrer. Second harmonic imaging: a new ultrasound technique to assess human brain tumour perfusion. Journal of Neurology, Neurosurgery & Psychiatry, 74(3):333–342, 2003.
- [27] W. R. Hedrick and Linda Metzger. Tissue harmonic imaging. Journal of Diagnostic Medical Sonography, 21(3):183–189, 2005.
- [28] Peter Hintz and Gunther Uhlmann. Reconstruction of Lorentzian manifolds from boundary light observation sets. International Mathematics Research Notices, 2019(22):6949–6987, 2017.
- [29] Peter Hintz, Gunther Uhlmann, and Jian Zhai. The Dirichlet-to-Neumann map for a semilinear wave equation on Lorentzian manifolds. arXiv:2103.08110, 2021.
- [30] Peter Hintz, Gunther Uhlmann, and Jian Zhai. An inverse boundary value problem for a semilinear wave equation on Lorentzian manifolds. International Mathematics Research Notices, arXiv:2005.10447, 2021.
- [31] Lars Hörmander. The Analysis of Linear Partial Differential Operators I. Springer Berlin Heidelberg, 2003.
- [32] Lars Hörmander. The Analysis of Linear Partial Differential Operators III. Classics in Mathematics. Springer, Berlin, 2007. Pseudo-differential operators, Reprint of the 1994 edition.
- [33] Lars Hörmander. The Analysis of Linear Partial Differential Operators IV. Springer Berlin Heidelberg, 2009.
- [34] VF Humphrey. Non-linear propagation for medical imaging. WCU, 2003:73–80, 2003.
- [35] Barbara Kaltenbacher and William Rundell. Determining the nonlinearity in an acoustic wave equation. Mathematical Methods in the Applied Sciences, 2021.
- [36] Barbara Kaltenbacher and William Rundell. On the identification of the nonlinearity parameter in the Westervelt equation from boundary measurements. Inverse Problems & Imaging, 15(5):865–891, 2021.
- [37] Yaroslav Kurylev, Matti Lassas, Lauri Oksanen, and Gunther Uhlmann. Inverse problem for Einstein-scalar field equations. To appear in Duke Mathematical Journal, arXiv:1406.4776, 2014.
- [38] Yaroslav Kurylev, Matti Lassas, and Gunther Uhlmann. Inverse problems in spacetime I: Inverse problems for Einstein equations - extended preprint version. arXiv:1405.4503, 2014.
- [39] Yaroslav Kurylev, Matti Lassas, and Gunther Uhlmann. Inverse problems for Lorentzian manifolds and non-linear hyperbolic equations. Inventiones Mathematicae, 212(3):781–857, 2018.
- [40] Ru-Yu Lai, Gunther Uhlmann, and Yang Yang. Reconstruction of the collision kernel in the nonlinear Boltzmann equation. SIAM Journal on Mathematical Analysis, 53(1):1049–1069, 2021.
- [41] Matti Lassas. Inverse problems for linear and non-linear hyperbolic equations. In Proceedings of the International Congress of Mathematicians: Rio de Janeiro 2018, pages 3751–3771. World Scientific, 2018.
- [42] Matti Lassas, Gunther Uhlmann, and Yiran Wang. Determination of vacuum space-times from the Einstein-Maxwell equations. arXiv:1703.10704, 2017.
- [43] Matti Lassas, Gunther Uhlmann, and Yiran Wang. Inverse problems for semilinear wave equations on Lorentzian manifolds. Communications in Mathematical Physics, 360(2):555–609, 2018.
- [44] Gilles Lebeau. Propagation des ondes dans les variétés à coins. Annales Scientifiques de l’École Normale Supérieure, 30(4):429–497, 1997.
- [45] R. B. Melrose and J. Sjöstrand. Singularities of boundary value problems. II. Communications on Pure and Applied Mathematics, 35(2):129–168, 1982.
- [46] R. B. Melrose and J. Sjöstrand. Singularities of boundary value problems. I. Communications on Pure and Applied Mathematics, 31(5):593–617, 1978.
- [47] R. B. Melrose and G. A. Uhlmann. Lagrangian intersection and the Cauchy problem. Communications on Pure and Applied Mathematics, 32(4):483–519, 1979.
- [48] Richard B Melrose. The Atiyah-Patodi-Singer index theorem. 1992.
- [49] Alain Piriou. Calcul symbolique non linéaire pour une onde conormale simple. Annales de l’institut Fourier, 38(4):173–187, 1988.
- [50] G. Soldati. Biomedical applications of ultrasound. In Comprehensive Biomedical Physics, pages 401–436. Elsevier, 2014.
- [51] Plamen Stefanov, Gunther Uhlmann, and Andras Vasy. Boundary rigidity with partial data. J. Amer. Math. Soc., 29(2):299–332, 2016.
- [52] Thomas L. Szabo. Nonlinear acoustics and imaging. In Diagnostic Ultrasound Imaging: Inside Out, pages 501–563. Elsevier, 2014.
- [53] Michael E. Taylor. Reflection of singularities of solutions to systems of differential equations. Communications on Pure and Applied Mathematics, 28(4):457–478, 1975.
- [54] Gail ter Haar. HIFU tissue ablation: Concept and devices. In Advances in Experimental Medicine and Biology, pages 3–20. Springer International Publishing, 2016.
- [55] James D. Thomas and David N. Rubin. Tissue harmonic imaging: Why does it work? Journal of the American Society of Echocardiography, 11(8):803–808, 1998.
- [56] Leo Tzou. Determining Riemannian manifolds from nonlinear wave observations at a single point. arXiv:2102.01841, 2021.
- [57] Frank Uhlig. On the block-decomposability of 1-parameter matrix flows and static matrices. Numerical Algorithms, (2):529–549, 2022.
- [58] Gunther Uhlmann and Yiran Wang. Determination of space-time structures from gravitational perturbations. Communications on Pure and Applied Mathematics, 73(6):1315–1367, 2020.
- [59] Gunther Uhlmann and Jian Zhai. Inverse problems for nonlinear hyperbolic equations. Discrete & Continuous Dynamical Systems - A, 41(1):455–469, 2021.
- [60] Gunther Uhlmann and Jian Zhai. On an inverse boundary value problem for a nonlinear elastic wave equation. Journal de Mathématiques Pures et Appliquées, 153:114–136, 2021.
- [61] Gunther Uhlmann and Yang Zhang. Inverse boundary value problems for wave equations with quadratic nonlinearities. Journal of Differential Equations, 309:558–607, 2022.
- [62] András Vasy. Propagation of singularities for the wave equation on manifolds with corners. Annals of Mathematics, 168(3):749–812, 2008.
- [63] Yiran Wang and Ting Zhou. Inverse problems for quadratic derivative nonlinear wave equations. Communications in Partial Differential Equations, 44(11):1140–1158, 2019.
- [64] Andrew G Webb. Introduction to biomedical imaging. John Wiley & Sons, 2017.