An adaptive BDF2 implicit time-stepping method
for the phase field crystal model
Abstract
An adaptive BDF2 implicit time-stepping method is analyzed for the phase field crystal model.
The suggested method is proved to preserve a modified energy dissipation law at the discrete levels
if the time-step ratios ,
a recent zero-stability restriction of variable-step BDF2 scheme for ordinary differential problems.
By using the discrete orthogonal convolution kernels and the corresponding convolution inequalities,
an optimal norm error estimate is established
under the weak step-ratio restriction ensuring the energy stability.
This is the first time such error estimate is theoretically proved for a nonlinear parabolic equation.
On the basis of ample tests on random time meshes,
a useful adaptive time-stepping strategy is suggested to efficiently capture
the multi-scale behaviors and to accelerate the numerical simulations.
Keywords: phase field crystal model; adaptive BDF2 method; discrete energy dissipation law;
discrete orthogonal convolution kernels; norm error estimate
AMS subject classiffications. 35Q99, 65M06, 65M12, 74A50
1 Introduction
The phase field crystal (PFC) growth model [1] is an efficient approach to simulate crystal dynamics at the atomic scale in space while on diffusive scales in time. This model has been successfully applied to a wide variety of simulations in the microstructure evolution [1], epitaxial thin film growth [2] and materials science across different time scales [3, 4]. The phase variable of PFC model describes a coarse-grained temporal average of the number density of atoms, and the model is thermodynamically consistent in that the free energy of the thermodynamic model is dissipative. Consider a free energy functional of Swift-Hohenberg type [1, 2],
| (1.1) |
where (), represents the atomistic density field and is a parameter related to the temperature. Then the phase field crystal equation is given by the gradient flow associated with the free energy functional ,
| (1.2) |
where is called the chemical potential. We assume that is periodic over the domain . By applying the integration by parts, one can find the volume conservation, , and the following energy dissipation law,
| (1.3) |
where the inner product , and the associated norm for all .
The PFC equation is a sixth-order nonlinear partial differential equation and it may be challenging to design efficient and stable numerical algorithms. As for the time integration approaches, Crank-Nicolson (CN) schemes [5, 6, 7, 8, 9, 10, 11] and backward differentiation formulas (BDF) [12, 13, 7, 8, 14, 11, 15, 16, 17] are wide-spread in the literatures. Due to the energy dissipation property (1.3), BDF1 and BDF2 methods seem to be more suitable than CN type schemes in resolving this stiff problem. Actually, the BDF1 and BDF2 methods both are A-stable and L-stable, while the trapezoidal formula is only A-stable. Moreover, the preservation of (1.3) at the discrete time levels, called energy stability, has been regarded as a basic requirement of numerical methods to be effective in simulating the long-time coarsening dynamics.
The main goal of the existing techniques is to guarantee the energy stability, including linearized treatments [18, 19, 20, 21, 7, 8] and the nonlinear progressing [12, 13, 5, 10, 14]. The linearized treatments always lead to a linear system of algebraic equations, which improve the computational efficiency since they avoid an inner iteration. There are many linearized strategies, such as the stabilized methods [18, 19, 20], the invariant energy quadratization (IEQ) method [21, 7, 8], and the scalar auxiliary variable (SAV) approach [21, 7, 8]. Precisely, the stabilized semi-implicit methods use some appropriate high-order linear terms to construct linearly energy stable schemes. The common goal of IEQ and SAV methods is to transform the original system into a new equivalent system with a quadratic energy functional preserving the corresponding modified energy dissipation property. We note that SAV approach usually leads to numerical schemes involving only the decoupled equations with constant coefficients. As is known to all, the linearized treatments require small time steps to control the linearization error or ensure the stability. However, large time steps are necessary to accelerate the numerical simulations, especially in the coarsening process of phase field models.
In recent years, the nonlinear treatments, mainly involving the convex splitting techniques [12, 6, 13, 5] and fully implicit methods [10, 14], have also received extensive attentions. In the framework of convex splitting strategy, the convex and concave parts of chemical potential are treated implicity and explicitly, respectively. It results in a nonlinear scheme having the unique solvability and unconditionally energy stability. As pointed out by Xu et al. [22], a major advantage of convex splitting implicit schemes is that a relatively large time-step size can be used; but such schemes with large time-step sizes may have time delays and hence may be inaccurate. Actually, the convex splitting scheme can be mathematically interpreted as a full implicit scheme of a convexified model with a time-delay regularized term of the original equation, see more details in [22]. Numerical evidences indicate that the convex splitting techniques usually lead to approximation of the solution of the original model at a delayed time, especially when large time-steps are used. So the fully implicit schemes are recommended by Xu et al. [22] since they are workable for large time-step sizes, and avoid the potential time-delays in the long-time numerical simulations.
As a remarkable feature of phase field problems including the PFC equation, they always permit multiple time scales in approaching the steady state. Therefore, the adaptive time-stepping strategy would be much more preferred to resolve varying time scales efficiently and to reduce the computational cost significantly. In the literature, some commonly used adaptive time-stepping strategies consist of utilizing the accuracy criterion [23] and the time derivative of the total energy [24, 10]. More precisely, the adaptive time step method reported in [23] permits large time steps when the solution is smooth, and uses small time steps when the solution is less regular. The adaptive technique used in [24] produces small time steps when the energy decays rapidly, and permits large time steps when the energy decays slowly. Considerable numerical evidences showed that both of them can greatly save the computational cost.
This paper considers an adaptive BDF2 implicit time-stepping method for the PFC equation. Consider the nonuniform time levels with the time-step sizes for , and denote the maximum time-step size . Let the local time-step ratio for , and let when it appears. Given a grid function , put , for . Taking , we always view the variable-step BDF2 formula as a discrete convolution summation
| (1.4) |
in which the discrete convolution kernels are defined by, for ,
| (1.5) |
and when . Obviously, by taking , the BDF2 scheme (1.4) reduces to the BDF1 method for . Here we will use the BDF1 scheme to compute the first-level numerical solution having the second-order temporal accuracy.
It is known that the rigorous numerical analysis of nonuniform one-step approaches might be relatively easy since they contain only one degree of freedom, i.e., the current time step size. By contrast, the numerical analysis of multi-step methods involving multiple degrees of freedom (the current and previous time step sizes) seems rather difficult, especially on a general class of time meshes. For the underlaying variable-step BDF2 method for ordinary initial-value problems, Grigorieff [25] proved almost forty years ago that it is zero-stable only if the adjacent time-step ratios . Twenty years ago, Becker [26] applied the variable-step BDF2 formula to a linear parabolic equation and established a second-order temporal convergence only if . However, the resulting error estimate is far from sharp because it involves an undesired prefactor where may be unbounded as the time step sizes vanish. Recently, Chen et al. [27] analyzed a variable-step stabilized BDF2 scheme for the Cahn-Hilliard equation. This work replaced the undesirable prefactor by a bounded exponential prefactor with the help of a generalized Grönwall inequality. Nonetheless, it seems that the somewhat rigid restriction in [27] may be hard to weaken due to the combined technique using the norm error to control the norm error.
Recently, the variable-step BDF2 method was revisited in our previous report [28] from a new point of view by making use of the positive semi-definiteness of BDF2 kernels . As a result, a concise norm convergence theory of adaptive BDF2 scheme for linear diffusion equation was established provided the adjacent time-step ratios . The main discrete tool used in [28] is the discrete orthogonal convolution (DOC) kernels, that is,
| (1.6) |
One has the following discrete orthogonal identity
| (1.7) |
where is the Kronecker delta symbol. By exchanging the summation order and using the identity (1.7), it is not difficult to check that
| (1.8) |
The equality (1.8) will play an important role in the subsequent analysis. More properties of the DOC kernels are referred to Lemma 3.1 below.
In this paper, we continue to develop the recent technique in [28] and derive some novel discrete convolution inequalities with respect to the DOC kernels . An optimal error estimate of the fully implicit BDF2 scheme with unequal time-step sizes is achieved for solving the PFC equation (1.2),
| (1.9) |
subject to the periodic boundary conditions and a proper initial data . The spatial operators are approximated by the Fourier pseudo-spectral method, as described in the next section. Firstly, the unique solvability is established in Theorem 2.1 by using the fact that the solution of nonlinear scheme (1.9) is equivalent to the minimization of a convex functional. Lemma 2.2 shows that the BDF2 convolution kernels are positive definite provided the adjacent time-step ratios satisfy a sufficient condition
-
S1.
for .
We then verify in Theorem 2.2 that the adaptive BDF2 time-stepping method (1.9) preserves a modified energy dissipation law at the discrete time levels under a proper step-size restriction. The maximum norm bound of solution is obtained in Lemma 2.3 so that the subsequent error estimate can be derived without assuming the Lipschitz continuity of nonlinear bulk force.
Section 3 focuses on the norm convergence of the suggested adaptive BDF2 method (1.9). The main tools are the above DOC kernels defined in (1.6) and the corresponding discrete convolution inequalities, see Lemmas 3.2 and 3.3. Although the condition S1 permits us to use a series of increasing time-steps with the amplification factors up to 3.561, very large time-steps always result in a loss of numerical accuracy. So large amplification factors would be rarely appeared continuously in practice and it is reasonable to assume that
-
S2.
The time-step ratios are contained in S1, but almost all of them less than , or , where is an index set
Potential users would be recommended to take with in practical numerical simulations. Also, as shown in Theorem 3.1 and Remark 2, this restriction S2 ensures the second-order convergence in time. Several numerical examples are presented in Section 4 to validate the accuracy and effectiveness of our method (1.9).
In summary, our contributions in this paper are three folds:
-
1.
An energy dissipation law at the discrete time level with a modified energy form is established for the BDF2 implicit method (1.9) if the adjacent step ratios satisfy S1. It leads to the stability in the maximum norm.
-
2.
The BDF2 implicit method (1.9) is shown to be convergent in the norm under the condition S1, and the second-order accuracy is achieved if S2 holds. To the best of our knowledge, this is the first time such an optimal norm error estimate of variable-step BDF2 method is proved for a nonlinear sixth-order parabolic problem.
-
3.
Extensive numerical experiments and comparisons to the Crank-Nicolson scheme are performed to show the effectiveness of BDF2 time-stepping approach, especially when coupled with an adaptive time-stepping strategy.
Throughout this paper, any subscripted , such as and , denotes a generic positive constant, not necessarily the same at different occurrences; while, any subscripted , such as and , denotes a fixed constant. Always, the appeared constants are dependent on the given data and the solution but independent of the time steps and spatial lengths.
2 Energy dissipation law and solvability
2.1 Spatial discretization and preliminary results
For simplicity of presentation, set the spatial domain and consider the uniform length in three spatial directions for an even positive integer . We define the discrete grid and put . Denote the space of -periodic grid functions For any grid functions , define the discrete inner product , the associated norm . Also, we will use the discrete norm and the maximum norm .
For a periodic function on , let be the standard projection operator onto the space , consisting of all trigonometric polynomials of degree up to , and be the trigonometric interpolation operator [29], that is,
where the complex exponential basis functions with . The coefficients refer to the standard Fourier coefficients of function , and the pseudo-spectral coefficients are determined such that .
The Fourier pseudo-spectral first and second order derivatives of are given by
The differentiation operators and can be defined in the similar fashion. In turn, we can define the discrete gradient and Laplacian in the point-wise sense, by
For any periodic grid functions , it is easy to check the following discrete Green’s formulas, see [30, 31] for more details, , , and . Also we have the following embedding inequality
| (2.1) |
For the underlying volume-conservative problem, it is convenient to define a mean-zero space
As usual, one can introduce a discrete version of inverse Laplacian operator by following the arguments in [31]. For a grid function , define
and an inner product
The associated norm can be defined by We have the following generalized Hölder inequality,
| (2.2) |
2.2 Unique solvability
Lemma 2.1
For any , it holds that .
Proof The generalized Hölder inequality (2.2) and the Young’s inequality lead to
Also, by using the discrete Green’s formula and Cauchy-Schwarz inequality, one has
The above two inequalities with and yields the claimed result.
Note that, the solution of BDF2 scheme (1.9) preserves the volume, , for . Actually, taking the inner product of (1.9) by 1 and applying the summation by parts, one has for . Multiplying both sides of this equality by the DOC kernels and summing the index from to , we get
It leads to directly by taking in the equality (1.8). Simple induction yields the volume conversation law, for .
Theorem 2.1
If the step size , the BDF2 scheme (1.9) is uniquely solvable.
Proof For any fixed time-level indexes , we consider the following energy functional on the space
Under the time-step size condition or , the functional is strictly convex since, for any and any ,
where Lemma 2.1 has been applied with the setting . Thus the functional has a unique minimizer, denoted by , if and only if it solves the equation
This equation holds for any if and only if the unique minimizer solves
which is just the BDF2 scheme (1.9). It verifies the claimed result and completes the proof.
2.3 Energy dissipation law
The following result, cf. [28, Lemma 2.1], shows that the BDF2 convolution kernels are positive definite provided the adjacent time-step ratios satisfy S1, or , where is the positive root of the equation . Consider the function
| (2.3) |
It is easy to check that is increasing in and decreasing in with respect to , and decreasing with respect to . So the condition S1 ensures
Lemma 2.2
Let S1 holds. For any real sequence with n entries, it holds that
for . So the discrete convolution kernels are positive definite,
Now we prove the energy stability of BDF2 scheme (1.9). Let be the discrete version of free energy functional (1.1), given by
| (2.4) |
Since the BDF2 formula (1.4) is naturally self-dissipative, we define a modified discrete energy,
where due to the setting .
Theorem 2.2
Assume that S1 holds and the time-step sizes are properly small such that
| (2.5) |
the variable-step BDF2 scheme (1.9) preserves the following energy dissipation law
Proof The first condition of (2.5) ensures the unique solvability in Theorem 2.1. We will establish the energy dissipation law under the second condition of (2.5). The volume conversation law implies for . Then we make the inner product of (1.9) by and obtain
| (2.6) |
With the help of the summation by parts and , the second term at the left hand side of (2.6) gives
It is easy to check the following identity
Then the third term in (2.6) can be bounded by
Thus it follows from (2.6) that
Applying Lemma 2.1, one has
where has been used. Thus we can obtain that
| (2.7) |
For the general cases , we take in the first inequality of Lemma 2.2 and apply the condition to obtain
Combining the above inequality with (2.7) yields for . It remains to consider . Recalling , we use to derive that
We combine this inequality with (2.7) to find , and complete the proof.
Remark 1
Some remarks on the time-step size constraint (2.5) are listed here under the step-ratio condition S1, that is, for . For , it gives and one can choose such that . Recalling the monotonicity of , we consider the following three cases for :
-
(i)
If , and then . One can choose the step size ;
-
(ii)
If , and then . One can choose the step size ;
-
(iii)
If , one can choose a small step size or step ratio to ensure the step size restriction (2.5) in adaptive computations, especially when the current step-ratio . For an example, the choice is sufficient if one choose , i.e., the next time-step ratio .
In summary, the time-step size constraint (2.5) is always mild in practical computations.
Lemma 2.3
3 norm error estimate
3.1 Some properties of DOC kernels
The following lemma gathers the results of Lemma 2.2, Corollary 2.1 and Lemma 2.3 in [28].
Lemma 3.1
To facilitate the convergence analysis, we present a discrete convolution inequality with respect to the DOC kernels , but leave the proof to Appendix A.
Lemma 3.2
If S1 holds, then for any real sequences and ,
where is a constant independent of the time , time-step sizes and step ratios .
Lemma 3.2 yields the following discrete embedding-like inequality in the quadratic form. Here and hereafter, we use the notation for the sake of brevity.
Lemma 3.3
If S1 holds, then for any grid function and any constant ,
3.2 Convolutional consistency in time
Now consider the error behavior of BDF2 time-stepping with respect to the variation of time-step sizes. Let be the local consistency error of BDF2 formula at the time . We will consider a convolutional consistency error defined by
| (3.1) |
Lemma 3.4
Proof We use the notations and for . The proof of [28, Lemma 3.2] gives
Recalling the definitions of BDF2 kernels (1.5) and DOC kernels (1.6), we find that
Lemma 3.1(II) shows . Thus we apply the triangle inequality to derive that
Moreover, the definition (1.5) of BDF2 kernels yields that and , and the claimed first inequality follows immediately. Then the second estimation can be derived by using Lemma 3.1 (II)-(III). It completes the proof.
Remark 2
Under the mild condition S1, Lemma 3.1 (III) shows such that
It will arrive at first-order convergence. The degraded accuracy is mainly attributed to the convolutional accumulation, from the irregular variation of time-step sizes, onto the first-level solution. If S2 holds, there exists a bounded quantity such that
where takes the maximum value of all step ratios and takes the maximum value of those step ratios for . Then Lemma 3.4 shows
which will yield the desired second-order convergence.
3.3 Convergence analysis
We use the standard semi-norms and norms in the Sobolev space for . Let be a set of infinitely differentiable -periodic functions defined on , and be the closure of in , endowed with the semi-norm and the norm .
For simplicity, denote , , and . We denote the maximum norm by and have the Sobolev embedding inequality for . Next lemma lists some approximations, see [29], of the -projection operator and trigonometric interpolation operator defined in subsection 2.1.
Lemma 3.5
For any and , it holds that
| (3.2) |
and, in addition if ,
| (3.3) |
Note that, the energy dissipation law (1.3) of PFC model (1.2) shows that . From the formulation (1.1), it is not difficult to see that can be bounded by a time-independent constant. By the projection estimate (3.2) in Lemma 3.5 and the Sobolev inequality, one has and then
| (3.4) |
where is dependent on the domain and initial data , but independent of the time . We are in the position to prove the norm convergence of the adaptive BDF2 scheme (1.9) by choosing an initial value .
Theorem 3.1
Assume that the PFC problem (1.2) has a solution for some integer . Suppose further that the step-ratios condition S1 and the time-step size restriction (2.5) hold such that the adaptive BDF2 implicit scheme (1.9) is unique solvable and energy stable. If the maximum time-step size is sufficiently small such that , then the solution is (at least, first-order) convergent in the norm,
where the positive constant is always dependent on the domain and the initial values and , but independent of the time , step sizes and step ratios . Remark 2 shows that the second-order time accuracy will be recovered by replacing the weak step-ratio condition S1 with a mild one S2.
Proof We evaluate the norm error by a usual splitting,
where is the -projection of exact solution at time and is the difference between the projection and the numerical solution of the BDF2 implicit scheme (1.9). Applying Lemma 3.5, one has
Once an upper bound of is available, the claimed error estimate follows immediately,
| (3.5) |
To bound , we consider two stages: Stage 1 analyzes the space consistency error for a semi-discrete system having a projected solution ; With the help of the DOC kernels and the maximum norm solution estimates in Lemma 2.3 and (3.4), Stage 2 derives the error estimate from a fully discrete error system by the standard norm analysis.
Stage 1: Consistency analysis of semi-discrete projection
A substitution of the projection solution and differentiation operator into the original equation (1.2) yields the semi-discrete system
| (3.6) |
where represents the spatial consistency error arising from the projection of exact solution, that is,
| (3.7) |
We will bound by applying the triangle inequality,
It is easy to check that since , so one has
| (3.8) |
where Lemma 3.5 was used in the second inequality. It remains to bound the term . Noticing that at the discrete level for , we use Lemma 3.5 to derive that
| (3.9) |
For the nonlinear term of , an application of the triangle inequality leads to
| (3.10) |
For the term , the triangle inequality yields
| (3.11) |
in which Lemma 3.5 and the Sobolev embedding inequality have been used in the second and third inequalities, respectively. For the remainder term in the above inequality (3.11), we have the following estimate
where the estimation (3.2) and the Sobolev embedding inequality were used in the second inequality. Inserting it into (3.11) yields . In a similar manner, one can find that . Thus, going back to (3.10) gives . The estimations (3.9) and (3.10) yield that .
As a consequence, one has and for . We now apply Lemma 3.1(III) to obtain that
| (3.12) |
Stage 2: norm error of fully discrete system
From the projection equation (3.6), one can apply the BDF2 formula to obtain the following approximation equation
| (3.13) |
where is the local consistency error of BDF2 formula, and is defined by (3.7). Subtracting the full discrete scheme (1.9) from the approximation equation (3.13), we have the following error system
| (3.14) |
where . Thanks to the maximum norm solution estimates in Lemma 2.3 and (3.4), one has
| (3.15) |
Multiplying both sides of equation (3.14) by the DOC kernels , and summing up from to , we apply the equality (1.8) with to obtain
| (3.16) |
where and are defined by (3.1) and (3.12), respectively. Making the inner product of (3.16) with , and summing up the superscript from 1 to , we have the following equality
| (3.17) |
where is defined by
| (3.18) |
We are to handle the quadratic form . By applying Lemma 3.2 with , and , one derives that
where the second inequality was obtained by Lemma 3.3 with and . Also, Lemma 3.1 (I) implies that . Then, by applying the Cauchy-Schwarz inequality and the maximum norm estimate (3.15), we obtain from (3.3) that
Therefore, it follows from (3.17) that
Choosing some integer () such that . Then, taking in the above inequality, one can obtain
We know that due to Lemma 3.1(III). Thus one gets
Under the time-step size restriction , we have
The discrete Grönwall inequality [28, Lemma 3.1] yields the following estimate
in which the estimate (3.12) and the initial error have been used. Moreover, Lemma 3.4 together with , due to Lemma 3.5, gives the bound of temporal error term . Therefore, one obtains the desired estimate from the triangle inequality (3.5) and completes the proof.
4 Numerical experiments
In this section, we apply the variable-step BDF2 scheme (1.9) to simulate the PFC equation (1.2) numerically. Always, a simple iteration is employed to solve the nonlinear algebra equations at each time level with the termination error .
4.1 Tests on random time meshes
Example 4.1
We take and consider the exterior-forced PFC model in the domain such that it has a solution .
Order 20 8.45e-02 1.97e-04 – 5.84 1 40 4.80e-02 7.73e-05 1.65 12.22 6 80 2.41e-02 1.23e-05 2.66 746.55 11 160 1.27e-02 2.94e-06 2.24 90.35 18 320 6.51e-03 5.97e-07 2.39 79.85 55
The time accuracy of variable-step BDF2 method (1.9) is examined via random time meshes. Let the step sizes for , where is the uniformly distributed random number and . The discrete norm error is recorded in each run and the experimental order of convergence is computed by , where denotes the maximum time-step size.
The domain is discretized by using mesh such that the temporal error dominates the spatial error in each run. We solve the problem until time . The numerical results are tabulated in Table 1, in which we also record the maximum time-step size , the maximum step ratio and the number (denote by in Table 1) of time levels with the step ratio From these data, we observe that the BDF2 scheme is robustly stable and second-order accuracy on nonuniform time meshes.
4.2 Numerical comparisons
Example 4.2
We take the temperature parameter and consider a randomly initial value for the PFC model (1.2) in , where is the uniformly distributed random number in . The square is discretized by a uniform mesh.
To begin with, we examine the numerical behaviors near the initial time by comparing the BDF2 method (1.9) with the unconditionally energy stable Crank-Nicoslon (CN) method [10],
and the Crank-Nicoslon convex-splitting (CNCS) scheme [12, 6],
where and . We note that the first-order convex-splitting scheme [12] is employed to start the CNCS scheme. Our computations use a small and the reference solution is computed by the uniform BDF2 method with a vary small time-step size . The solutions with different time-step sizes are plotted in Figure 1. In subplot (a), after one step using , the BDF2 solution is in good with the reference solution, and the CNCS solution is slightly different from the reference solution, while the CN solution is completely different from the reference solution. Subplot (b) depicts the approximations of 10 steps using . We observe that the CN solutions have non-physical oscillations. The subplots (c)-(d) show the numerical results after 20 and 40 steps, respectively. It is seen that the numerical oscillations in the CN solutions are gradually dissipated by very small time-steps.




BDF2 CNCS CN Iter CPU Iter CPU Iter CPU 5.1224 0.0122 4.3265 0.0090 5.1020 0.0086 3.9479 0.0110 3.2365 0.0072 4.0100 0.0072 3.0064 0.0095 3.0044 0.0070 3.0146 0.0061



In order to see the numerical performance, we use the same initial data to compute the original energy (, similarly hereinafter) curves by different time steps until time , see Figure 2. The corresponding average iteration numbers (denoted by “Iter”) and average CPU time (denoted by “CPU”, in seconds) for each time step are listed in Table 2. The reference original energy curve is obtained by the uniform BDF2 method with a small time-step . Table 2 shows that the computational cost of BDF2 method is comparable to those of CN and CNCS methods. However, as seen in Figure 2, the original energy curve generated by the CN method deviates from the reference one and the energy decay property of the CNCS method is numerically destroyed when some large time-steps are used, while the BDF2 method generates faithful (original) energy curves for these time-step sizes.
Numerical results indicate that the CN method tends to generate non-physical oscillations near initial time, and the BDF2 and CNCS methods can suppress the initial oscillations, and the former may be a better choice when some large time-step sizes are applied.
4.3 Adaptive time-stepping strategy
In simulating the phase field problems, the temporal evolution of phase variables involve multiple time scales, such as the growth of a polycrystal discussed in Example 4.3, an initial random perturbation evolves on a fast time scale, while the later dynamic coarsening evolves on a very slow time scale. In the following computations, we shall adopt a variant time adaptive strategy of [23, Algorithm 1] to choose the time step sizes.
The second-order scheme used in Algorithm 1 refers to the nonuniform BDF2 scheme in this article. The adaptive time step is given by where is a default safety coefficient, is a reference tolerance, is the relative error at each time level, and is the current time step. In addition, and are the predetermined maximum and minimum time steps. In our computations, if not explicitly specified, we choose the safety coefficient , the reference tolerance , the maximum time step and the minimum time step , respectively.
4.4 Growth of a polycrystal
Example 4.3
We take the parameter and use a uniform mesh to discrete the spatial domain . As seeds for nucleation, three random perturbations on the three small square patches are taken as where the constant density , is amplitude and the random numbers are uniformly distributed in . The centers of three pathes locate at and , with the corresponding amplitudes , and , respectively. The length of each small square is set to .
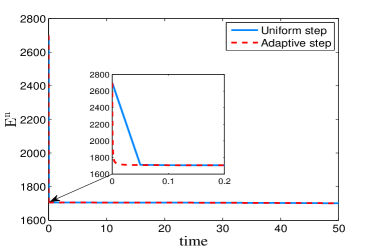










We simulate the growth of a polycrystal in a supercooled liquid with the above random initial liquid density in this example. We begin with examining the efficiency of adaptive time-stepping Algorithm 1 by using different time strategies, i.e., the uniform and adaptive time approaches. At first, the solution is computed until the time with a constant time step . We then implement the adaptive strategy described in Algorithm 1 to simulate the dynamical process by using the same initial data. The time evolutions of discrete energies and the corresponding time-step sizes are plotted in Figure 3. As can be seen, the adaptive energy curve is practically indistinguishable from that generated by using a small constant step size, and the former exhibits more details owing to the smaller step sizes are used. We note that this simulation takes 1000 uniform time steps with , while the total number of adaptive time steps is 393. Thus the above numerical results show that the time-stepping adaptive strategy is computationally efficient.
We now use the BDF2 scheme coupled with Algorithm 1 to simulate the growth of a polycrystal in a supercooled liquid. In the second set of simulations, we take the time and the other parameters are the same as given earlier. The time evolutions of the phase variable are depicted in Figure 4. We see that, the speed of moving interfaces is deeply affected by the initial amplitude, that is, the larger the amplitude , the faster the polycrystal grows. Also, three different crystal grains grow and become large enough to form grain boundaries eventually. The observed phenomena are in good agreement with the published results [14, 11]. The original energy, mass, and adaptive time steps are shown in Figure 5. As predicted by our theory, the discrete mass is conservative up to a tolerance of . It is seen that the energy has large variations when the time , but it dissipates very slowly when the time escapes. The right subplot of Figure 4 shows that small time step sizes are adopted when the energy dissipates fast, and large step sizes are utilized when the energy decreases slowly.
5 Concluding remarks
Under the step ratio constraint S1, we proved the variable-step BDF2 method (1.9) for the PFC model preserves a discrete modified energy dissipation law, which implies the maximum norm bound of numerical solution. The DOC technique was then improved to establish a concise convergence analysis of the variable-step BDF2 method. We proved at the first time that the BDF2 method is convergent in the norm under the weak step ratio restriction S1.
In our recent work [32], the DOC technique will be further developed to establish a sharp error estimate on the variable-step BDF2 scheme for the molecular beam epitaxial growth model without slope selection. It is expected that the DOC technique would be a useful analysis tool for other variable-step BDF type methods, especially when they are combined with the convex splitting technique or stabilized strategies to achieve unconditionally energy stable in simulating gradient flow problems. We plan to address these issues in further studies.
Acknowledgements
The authors would like to thank Prof. Xiuling Hu, Prof. Yuezheng Gong, and Dr. Lin Wang for their valuable discussions and fruitful suggestions. We also thank the editor and the anonymous referees for their valuable comments and suggestions, which are very helpful for improving the quality of the article.
Appendix A The proof of Lemma 3.2
To facilitate the proof in what follows, we introduce the following matrices
where the discrete kernels and are defined by (1.5) and (1.6), respectively. It follows from the discrete orthogonal identity (1.7) that
| (A.1) |
If the step ratios condition S1 holds, Lemma 2.2 shows that the real symmetric matrix
| (A.2) |
that is, , where is defined by (2.3) and . According to Lemma 3.1 (I), the real symmetric matrix
| (A.3) |
in the sense of .
Moreover, we define a diagonal matrix and
| (A.8) |
where the discrete kernels and are given by ()
Some results on the matrix are presented as follows.
Lemma A.1
If the step ratios condition S1 holds, then the minimum eigenvalue of the real symmetric matrix
| (A.9) |
can be bounded by
where is defined by
| (A.10) |
Thus is positive definite and there exists a non-singular upper triangular matrix such that
Proof Note that, . Thus is increasing in and decreasing in with respect to . Also, is decreasing with respect to such that for any . Simple calculations show that
| (A.11) |
For any fixed index , by using the definition (A.8) of and the well–known Gerschgorin’s circle theorem, we find that the minimum eigenvalue of can be bounded by
where the last estimate follows from (A.11). It also says that the real symmetric matrix is positive definite. Then we complete the proof by noticing the definition (A.2) and applying the standard Cholesky decomposition of .
Lemma A.2
If the step ratios condition S1 holds, the maximum eigenvalue of the real symmetric matrix can be bounded by
where is defined in (A.8) and is defined by
| (A.12) |
Proof Obviously, is increasing with respect to the two variables and . We have . From the definition (A.8) of , one has
where the discrete kernels and are given by ()
For any fixed index , the Gerschgorin circle theorem gives an upper bound of the maximum eigenvalue of the real symmetric matrix , that is,
It completes the proof.
Lemma A.3
If S1 holds, then the positive definite matrix and
for any real vectors and .
Proof For any fixed index , let . The equality (A.1) gives . In the element-wise sense, one has and . Then we have
| (A.13) |
and then, by taking ,
| (A.14) |
By virtue of the decomposition in Lemma A.1, we have
where the Young’s inequality was used in the inequality and the identity (A.13) was applied in the last equality. This completes the proof.
Now we are in position to present the proof of Lemma 3.2.
Proof of Lemma 3.2 To avoid possible confusions, we define the vector norm by and the associated matrix norm . Lemma A.3 gives
| (A.15) |
We will handle the second term at the right side of (A.15). Lemma A.1 shows and . Moreover, Lemma A.3 gives
such that . We apply the definition (A.8) to derive that
where we denote
| (A.16) |
Therefore it follows from (A.15) that
To complete the proof, it remains to show that is uniformly bounded with respect to the level index . Fortunately, Lemmas A.1 and A.2 confirm that there exists an -independent constant . Actually, under the weak step-ratio condition S1, one has a rough estimate
It completes the proof.
Remark 3 (Improved estimate on the constant )
As noted in [28], the adjacent step ratios take when the solution varies slowly, and the restriction S1 only takes its effect inside the fast-varying (high gradient) time domains (), in the transition regions from the slow-varying to fast-varying domains (), and in the “fast-to-slow” transition regions (). Then the positive constant in the proof of Lemma 3.2 can be refined by considering three different cases, cf. Remark 1,
-
(a)
If , one can choose
-
(b)
If , then one has
-
(c)
If , one can choose the next step-ratio (to reduce or slightly enlarge the step size) such that
Always, one can take in the adaptive computations.
References
- [1] K. Elder, M. Katakowski, M. Haataja, and M. Grant. Modeling elasticity in crystal growth. Phys. Rev. Lett., 88:245701, 2002.
- [2] K. Elder and M. Grant. Modeling elastic and plastic deformations in nonequilibrium processing using phase field crystals. Physical Review E, 70:051605, 2004.
- [3] N. Provatas, J. Dantzig, B. Athreya, P. Chan, P. Stefanovic, N. Goldenfeld, and K. Elder. Using the phase-field crystal method in the multi-scale modeling of microstructure evolution. JOM, 59:83–90, 2007.
- [4] E. Asadi and M. Zaeem. A review of quantitative phase-field crystal modeling of solid-liquid structures. JOM, 67:186–201, 2015.
- [5] A. Baskaran, J. Lowengrub, C. Wang, and S. Wise. Convergence analysis of a second order convex splitting scheme for the modified phase field crystal equation. SIAM J. Numer. Anal., 51:2851–2873, 2013.
- [6] L. Dong, W. Feng, C. Wang, S. Wise, and Z. Zhang. Convergence analysis and numerical implementation of a second order numerical scheme for the three-dimensional phase field crystal equation. Comput. Math. Appl., 75:1912–1928, 2018.
- [7] Q. Li, L. Mei, X. Yang, and Y. Li. Efficient numerical schemes with unconditional energy stabilities for the modified phase field crystal equation. Adv. Comput. Math., 45:1551–1580, 2019.
- [8] Z. Liu and X. Li. Efficient modified stabilized invariant energy quadratization approaches for phase-field crystal equation. Numer. Algo., 2019. Doi:10.1007/s11075-019-00804-9.
- [9] X. Jing and Q. Wang. Linear second order energy stable schemes for phase field crystal growth models with nonlocal constraints. Comput. Math. Appl., 79:764–788, 2020.
- [10] Z. Zhang, Y. Ma, and Z. Qiao. An adaptive time-stepping strategy for solving the phase field crystal model. J. Comput. Phys., 249:204–215, 2013.
- [11] X. Yang and D. Han. Linearly first- and second-order, unconditionally energy stable schemes for the phase field crystal model. J. Comput. Phys., 330:1116–1134, 2017.
- [12] S. Wise, C. Wang, and J. Lowengrub. An energy-stable and convergent finite-difference scheme for the phase field crystal equation. SIAM J. Numer. Anal., 47:2269–2288, 2009.
- [13] C. Wang and S. Wise. An energy stable and convergent finite-difference scheme for the modified phase field crystal equation. SIAM J. Numer. Anal., 49:945–969, 2011.
- [14] Y. Li and J. Kim. An efficient and stable compact fourth-order finite difference scheme for the phase field crystal equation. Comput. Methods Appl. Mech. Eng., 319:194–216, 2017.
- [15] Y. Yan, W. Chen, C. Wang, and S. Wise. A second-order energy stable BDF numerical scheme for the Cahn-Hilliard equation. Comm. Comput. Phys., 23:572–602, 2018.
- [16] K. Cheng, W. Feng, C. Wang, and S. Wise. An energy stable fourth order finite difference scheme for the Cahn-Hilliard equation. J. Comput. Appl. Math., 362:574–595, 2019.
- [17] K. Cheng, C. Wang, and S. Wise. An energy stable BDF2 Fourier pseudo-spectral numerical scheme for the square phase field crystal equation. Comm. Comput. Phys., 26:1335–1364, 2019.
- [18] C. Xu and T. T. Tang. Stability analysis of large time-stepping methods for epitaxial growth models. SIAM J. Numer. Anal., 44:1759–1779, 2006.
- [19] J. Shen and X. Yang. Numerical approximations of Allen-Cahn and Cahn-Hilliard equations. Discrete. Contin. Dyn. Sys., 28:1669–1691, 2010.
- [20] J. Shen, T. Tang, and J. Yang. On the maximum principle preserving schemes for the generalized Allen-Cahn equation. Commu. Math. Sci., 14:1517–1534, 2016.
- [21] Gong. Y. and J. Zhao. Energy-stable Runge-Kutta schemes for gradient flow models uing the energy quadratization approach. Appl. Math. Lett., 94:224–231, 2019.
- [22] J. Xu, Y. Li, S. Wu, and A. Bousquet. On the stability and accuracy of partially and fully implicit schemes for phase field modeling. Comput. Methods Appl. Mech. Eng., 345:826–853, 2019.
- [23] H. Gomez and T. Hughes. Provably unconditionally stable, second-order time-accurate, mixed variational methods for phase-field models. J. Comput. Phys., 230:5310–5327, 2011.
- [24] Z. Qiao, Z. Zheng, and T. Tang. An adaptive time-stepping strategy for the molecular beam epitaxy models. SIAM J. Sci. Comput., 22:1395–1414, 2011.
- [25] R. D. Grigorieff. Stability of multistep-methods on variable grids. Numer. Math., 42:359–377, 1983.
- [26] J. Becker. A second order backward difference method with variable steps for a parabolic problem. BIT Numerical Mathematics, 38:644–662, 1998.
- [27] W. Chen, X. Wang, Y. Yan, and Z. Zhang. A second order BDF numerical scheme with variable steps for the Cahn-Hilliard equation. SIAM J. Numer. Anal., 57:495–525, 2019.
- [28] H.-L. Liao and Z. Zhang. Analysis of adaptive BDF2 scheme for diffusion equations. Math. Comp., 2020, to appear.
- [29] J. Shen, T. Tang, and L. Wang. Spectral methods: Algorithms, analysis and applications. Springer-Verlag, Berlin Heidelberg, 2011.
- [30] S. Gottlieb and C. Wang. Stability and convergence analysis of fully discrete Fourier collocation spectral method for 3-D viscous Burgers’ equation. J. Sci. Comput., 53:102–128, 2012.
- [31] K. Cheng, C. Wang, S. Wise, and X. Yue. A second-order, weakly energy-stable pseudo-spectral scheme for the Cahn-Hilliard equation and its solution by the homogeneous linear iteration method. J. Sci. Comput., 69:1083–1114, 2016.
- [32] H-L. Liao, X. Song, T. Tang, and T. Zhou. Analysis of the second order BDF scheme with variable steps for the molecular beam epitaxial model without slope selection. preprint, 2019. submitted to pubilication.