iint \savesymbolopenbox \restoresymbolTXFiint \restoresymbolTXFopenbox
A Scaling Approach to Elliptic Theory for Geometrically-Natural Differential Operators with Sobolev-Type Coefficients
Abstract
We develop local elliptic regularity for operators having coefficients in a range of Sobolev-type function spaces (Bessel potential, Sobolev-Slobodeckij, Triebel-Lizorkin, Besov) where the coefficients have a regularity structure typical of operators in geometric analysis. The proofs rely on a nonstandard technique using rescaling estimates and apply to operators having coefficients with low regularity. For each class of function space for an operator’s coefficients, we exhibit a natural associated range of function spaces of the same type for the domain of the operator and we provide regularity inference along with interior estimates. Additionally, we present a unified set of multiplication results for the function spaces we consider.
1 Introduction
Elliptic differential operators associated with Riemannian metrics having limited regularity arise naturally in the construction of initial data in general relativity. Moreover, because of connections with the associated evolution problem, it is natural to work with metrics having regularity measured in Sobolev-type scales, and with a non-integral number of derivatives [KR05][ST05][Ma06]. In this paper we develop a largely self-contained account of the mapping properties and local elliptic regularity theory for differential operators having coefficients in any one of a broad category of Sobolev-type spaces, including spaces with non-integral levels of differentiability, where the coefficients also admit a regularity structure typical of geometric differential operators. For each category of function spaces considered, we allow for coefficients with low regularity, and our approach to local elliptic theory is apparently novel in this context, relying on rescaling estimates for Sobolev-type spaces to reduce the problem to that of constant-coefficient operators.
Local elliptic regularity is a well-established subject, with a wealth of results available in a number of contexts, even in low-regularity settings. For second-order scalar elliptic operators in divergence form [Tr73] treats a form of elliptic regularity assuming only that the coefficients are measurable, although only for a very limited set of (operator-dependent) function spaces. A related theory appears in the text [GT01] that applies to a range of integer-based Sobolev spaces under progressively stronger hypotheses on the coefficients of the elliptic operator. See also [Gi93], which contains analogous results that apply to systems of equations. Spaces with a non-integral number of derivatives include the -based spaces which appear naturally in hyperbolic problems as well as their generalizations: Bessel potential spaces , Sobolev-Slobodeckij spaces , Triebel-Lizorkin spaces , and Besov spaces . So long as the differential operators involved have smooth coefficients, elliptic theory for these spaces can be found in [Tr10]. For less regular coefficients, one is led to the theory of pseudodifferential operators with non-smooth symbols and paradifferential calculus. See, e.g., [Ta91] and [Ma88]. Nevertheless, this theory is somewhat technical, and it can be difficult for non-practitioners to apply it immediately to the specific class of questions addressed in the current work.
Within the mathematical relativity literature one finds instead a sequence of custom-made regularity theorems for second-order operators associated with with a metric on a domain of dimension :
-
•
[CC81]: with , and hence possessing Hölder continuous derivatives,
- •
-
•
[Ma06]: with , and hence Hölder continuous,
-
•
[HNT09] with , and and hence Hölder continuous.
Although [Ma06] was the first work in this context to treat spaces with a fractional number of derivatives, its limited focus on the setting meant that it did not recover the full set of earlier results. By contrast, [HNT09] recovers prior results fully, but its main regularity result, Lemma 32, contains an error that is not straightforward to correct. Moreover, although Sobolev-Slobodeckij spaces are a reasonable choice for interpolating between integer-based Sobolev spaces, Bessel potential spaces enjoy better interpolation and embedding properties and are a compelling alternative. Hence it would be desirable to extend the results above to other classes of function spaces, and indeed our work here concerning Bessel potential spaces provides the elliptic theory used by the recent preprint [ALM22], which treats geometric operators on asymptotically hyperbolic manifolds.
Our main results concern local elliptic regularity for differential operators having coefficients in any of the Sobolev-type spaces , , and mentioned above. Although we use basic techniques from the theory of paraproducts in the proofs of some of our work, we do so with a minimum of theoretical overhead, and Section 3.2 contains a short survey of the few tools needed. Moreover, although Bessel potential spaces are a special case of Triebel-Lizorkin spaces and could have been dealt with as a consequence of the general theory, in Section 2 we present a simplified approach in the Bessel potential context that is free from paraproduct methods. This approach comes at the expense of establishing a less-than-sharp intermediate result on rescaling (Proposition 2.17 vs. Proposition 3.10), but this has no impact on the final regularity theory. Readers who are only interested in the Bessel potential case can stop reading at the end of Section 2 without needing to move on to the relative complexities of the more general function spaces.
In addition to extending the scope of [Ma06] and [HNT09] to a broader class of function spaces, the results of this paper strengthen our earlier work. Rather than simply obtaining a-priori estimates for functions with a known level of regularity, we obtain full regularity inference in the spirit of, e.g., [GT01] Theorem 8.8. Additionally, we have extended the range of parameters of the function spaces treated. This extension is only marginal in the generic case, but substantially extends the range of parameters whenever the operators involved omit low-order terms; see the discussion following Definition 2.4. Although we restrict our attention to interior regularity, the tools developed here are also sufficient to address boundary value problems. We have omitted these considerations, in part for simplicity of exposition: boundary traces generally lie in Besov spaces, which are among the most technical of the spaces we consider, and which we treat last. We will address boundary regularity in followup work.
Principal applications of elliptic regularity only apply to the range of Lebesgue exponents . Motivated by this, and again for the sake of simple exposition, we have avoided the edge cases of and where , much less the quasi-normed spaces where . We observe, however, that the multiplication rules of Theorems 3.5 and 5.4 and the rescaling estimates of Propositions 3.10 and 5.11 are candidates that could benefit from extending beyond the parameter ranges treated here.
1.1 Coefficient regularity structure
Differential operators in geometric analysis admit a representation in local coordinates in terms of coefficients that are universal expressions involving the values and derivatives of the coordinate representation of a metric . The prototypical example is the Laplacian associated with , which can be written in terms of the inverse metric and the determinant as
The leading order coefficients have the regularity of , whereas the next order coefficients involve first derivatives of . More generally, consider the conformal Laplacian of ,
where and where is the scalar curvature of the metric. If the coefficients of the metric lie in with , a computation using Hölder’s inequality and Sobolev embedding shows that has the form
where
In particular, the leading order coefficients have the regularity of the metric, and there is a loss of one derivative as we descend from one order of coefficient to the next. This leads us to consider elliptic -order operators of the form
| (1.1) |
where the top-most coefficients lie in a space with derivatives and more generally where each . While this category of operator is not the most general possible in geometric analysis [St75], it is sufficiently broad to include many operators of interest, including Hodge Laplacians, the Lichnerowicz Laplacian [Be87], the vector Laplacian [Is95] and the conformal Laplacian, so long as and so long as the underlying metric lies in a space sufficiently regular so as to ensure Hölder continuity. It also includes the class of geometric operators satisfying the hypotheses of Assumption P of [ALM22].
Given an operator of the form (1.1) with leading order coefficients in some space with derivatives, one wants to find compatible spaces with derivatives such that that and such that local elliptic regularity holds: roughly that if is regular enough that can act on it, and if , then locally along with associated estimates. We establish this theory for elliptic operators of the form (1.1) where the topmost coefficients come from a space of one of the following types:
-
•
a Bessel potential space , in which case is another Bessel potential space (Section 2),
-
•
a Triebel-Lizorkin space , in which case is another Triebel-Lizorkin space (Section 3),
-
•
a Sobolev-Slobodeckij space , in which case is another Sobolev-Slobodeckij space (Section 4),
-
•
a Besov space , in which case is another Besov space (Section 5).
In all these cases, the space is restricted to be suitably regular so that its elements are Hölder continuous, and we give a careful description of the parameters determining the allowable spaces .
1.2 Rescaling estimates
Our general approach is the same for all the function spaces considered, and in the specific case of Bessel potential spaces the core ingredients are:
-
1.
Multiplication properties for spaces, Theorem 2.5.
- 2.
-
3.
A rescaling estimate, described below.
-
4.
A coefficient freezing/blowup argument which uses the rescaling estimate to establish “regularity at a point”, Proposition 2.20.
-
5.
A partition of unity decomposition and bootstrap to obtain the main regularity result, Theorem 2.21.
Coefficient freezing as used in step 4 above is classical, but we use a nonstandard rescaling technique to manage the perturbations from the constant coefficient operator. To motivate this technique, consider the simplest case of integer-based Sobolev spaces on the unit ball , and let , where , . For we define , so rescales up from the ball of radius to the unit ball. Derivatives are damped under this rescaling operation, but the singularities permitted by spaces are enhanced, and a computation using Sobolev embedding and Hölder’s inequality shows
| (1.2) |
where , except in the marginal case , in which case we can take to be any negative number. The cap appears in this estimate because of the constants, which are invariant under rescaling. However, if so that elements of are Hölder continuous, and if , one can do better. Now estimate (1.2) holds with , except in the marginal case , in which case we can use any . Regardless, if and if , estimate (1.2) holds for some .
Now consider a differential operator with coefficients and with . The leading order coefficients lie in and are therefore Hölder continuous. Hence we can define the principal part of at ,
If is a distribution that is regular enough that can act on it, a computation shows that
The aim at this point is to show that by taking sufficiently small, the coefficients of the perturbations and can be made as small as desired so that a parametrix for can be employed to deduce regularity properties of , and this is where the rescaling estimate (1.2) is needed. Using the structural hypothesis along with the rescaling estimate (1.2) we find, except in marginal cases where an unimportant adjustment is needed, that the coefficients of satisfy
Since for each of these coefficients, and since , we obtain
for some . Hence the coefficients of scale away as . On the other hand, the high order perturbation coefficients lie in with and vanish at , so the improved variation of the scaling estimate (1.2) again shows that the coefficients of vanish as .
Propositions 3.10 and 5.11 show that estimate (1.2) generalizes to Triebel-Lizorkin and Besov spaces respectively. For Triebel-Lizorkin spaces, the proof requires elementary techniques from Littlewood-Paley theory and paramultiplication, and the necessary background is recalled in Section 3.2 prior to the proof of Proposition 3.10. The analogous results for Besov spaces follow from the Triebel-Lizorkin result and interpolation. As mentioned above, in the interest of approachability, for Bessel potential spaces we use an alternative approach with a rescaling estimate, Proposition 2.17, that is not sharp, but which admits an elementary proof that is independent of Littlewood-Paley theory.
1.3 Multiplication
Mapping properties of differential operators with coefficients in Sobolev-type spaces depend on pointwise multiplication rules that determine when a product of factors from two given function spaces lies in a third space. There is an extensive literature on this subject, including [Pa68] [Zo77] [Am91] [ST95] [RS96] [Jo95] [BH21] that contains individual pieces of the theory we require. Chapter 4 of [RS96] is especially comprehensive. Where these works overlap, there is generally agreement on the hypotheses, but certain edge cases are treated, or not, by different authors. Rather than attempt to assemble these disparate pieces into a coherent whole, we include a self-contained proof of multiplication rules for Triebel-Lizorkin spaces, Theorem 3.5, and for Besov spaces, Theorem 5.4, in the appendices. Corresponding rules for Bessel potential spaces and Sobolev-Slobodeckij spaces, Theorems 2.5 and 4.2 respectively, follow as corollaries. The proofs rely on the same elementary Littlewood-Paley/paramultiplication techniques that we use to obtain the rescaling estimates of Section 3.2. Although we have limited our analysis to the region for the spaces and , in this restricted setting we obtain a consistent set of hypotheses over all ranges of that are simpler in character, and that are at least as sharp, as what appears currently in the literature.
2 Coefficients in Bessel Potential Spaces
In this section we prove interior elliptic estimates for operators having coefficients in Bessel potential spaces, with a goal of presenting the result using a minimum of technology. The primary background requirements are:
-
•
standard facts about Sobolev spaces with integer orders of differentiability,
-
•
embedding, interpolation and duality theory for Bessel potential spaces,
-
•
multiplication rules for Bessel potential spaces, which we recall below, and
-
•
elementary tools from harmonic analysis needed to construct parametrices for elliptic operators with constant coefficients.
In particular, the approach is otherwise independent of Littlewood-Paley theory or the general theory of pseudodifferential operators, beyond what is required to define the spaces themselves.
Let denote the Fourier transform and for let be the pseudodifferential operator given by
Given and a tempered distribution on belongs to the Bessel potential space if , in which case
We use the same notation for for distributions taking on values in a real vector space (e.g., or ). When , then with this definition coincides with standard Sobolev spaces of distributions having derivatives laying in Lebesgue spaces.
Given an open set the space consists of restrictions of distributions in to and is given the quotient norm. That is,
We say an open set is a domain if each point in the boundary admits an open ball centered at it and a diffeomorphism from it to an open subset of such that the image of the intersection of with the ball is a simply connected subset of the upper half space . If is a bounded domain and if , then coincides with the usual integer-based Sobolev spaces.
We have the following embedding, interpolation, and duality properties of Bessel potential spaces, which are special cases of the same results cited in Section 3 for the more general Triebel-Lizorkin spaces.
Proposition 2.1.
Assume and , and suppose is a bounded open set in .
-
1.
If then and .
-
2.
If then .
-
3.
If and then .
-
4.
If and then .
-
5.
If then and .
In the final embedding above, denotes the Hölder space with norm , with an analogous norm for functions defined on .
Proposition 2.2.
Assume and , and suppose is either or is a bounded domain in . For ,
where
Proposition 2.3.
Assume and . The bilinear map given by extends to a continuous bilinear map where and . Moreover, is a continuous identification of with .
2.1 Mapping properties
The following definition encodes the regularity structure of the coefficients of differential operators appearing frequently in geometric analysis.
Definition 2.4.
Consider a order differential operator on an open set ,
where the coefficients are -valued for a system of variables. We say that is of class for some and if each
If omits terms of order lower than for some , i.e.,
we say .
To motivate the roles of the pair of indices and in the previous definition, recall from the introduction the conformal Laplacian of a metric on a bounded domain . An elementary computation using Sobolev embedding shows that if with then is of class . The low-order term is the scalar curvature and its presence restricts the set of spaces that can act on: functions in these spaces must possess at least one derivative. By contrast, the ordinary Laplacian for the same metric has no zero-order term and consequently is an operator of class . Moreover, one can show that it acts on a broader class of spaces and, for example, defines a map . Hence, in addition to the order of the differential operator we also track the order of the term with the lowest number of derivatives appearing in the operator.
Consider an operator of class . It defines a map from , the set of smooth functions on admitting smooth extensions to , to the set of distributions on , and we wish to establish finer-grained mapping properties. Specifically, we would like to determine the indices such that is continuous .
The following result on multiplication of Bessel potential spaces is the tool needed to establish these mapping properties. It can be readily proved for integral orders of differentiability using only Sobolev embedding and duality arguments, and a slightly less sharp version that would, in fact, be sufficient for our purposes can be proved with interpolation techniques ([BH21] Theorem 5.1). See also [Pa68], the original reference for multiplication of Bessel potential spaces, which also considers the case of more than two factors. The statement below is a special case of the multiplication rules for the broader class of Triebel-Lizorkin spaces proved in Appendix A.
Theorem 2.5.
Let be a bounded open subset of . Suppose and . Let and be defined by
Pointwise multiplication of functions extends to a continuous bilinear map so long as
| (2.1) | ||||
| (2.2) | ||||
| (2.3) | ||||
| (2.4) | ||||
| (2.5) |
with inequality (2.5) strict if .
There are admittedly a large number of conditions in the previous result, but they all have an easy interpretation. For a pair we call
the Lebesgue regularity of the pair, the terminology motivated by the observation that if then Sobolev embedding implies embeds in . Using this vocabulary, the conditions (2.1)–(2.5) are, loosely:
-
(2.1)
If one factor has a negative number of derivatives, the remaining factor must have at as many positive derivatives.
-
(2.2)
The product will not have, in general, more derivatives than either factor.
-
(2.3)
The product will not have, in general, better Lebesgue regularity than either factor.
-
(2.4)
is a least-regular barrier for multiplication of spaces. Note that in light of inequality (2.5) this condition only plays a role if .
-
(2.5)
The Lebesgue regularity of the product is consistent with multiplication of spaces. Strictness of this inequality is needed in edge cases because is not the right target space for borderline Sobolev embeddings.
Repeated applications of Theorem 2.5 imply the following mapping result, where we emphasize the new hypothesis which ensures, among other consequences, that the highest order coefficients of the differential operator are continuous.
Proposition 2.6.
Let be a bounded open subset of . Suppose , , and with . An operator of class extends from a map to a continuous linear map so long as
| (2.6) | ||||
where is the conjugate Lebesgue exponent of . Moreover, the map between these spaces depends continuously on its coefficients .
Conditions (2.6) on and describe the natural Sobolev indices of spaces for an operator of class to act on, and it is convenient to have notation for this set.
Definition 2.7.
Suppose , and with . The compatible Sobolev indices for an operator of class acting on a bounded open set is the set
of tuples satisfying (2.6).
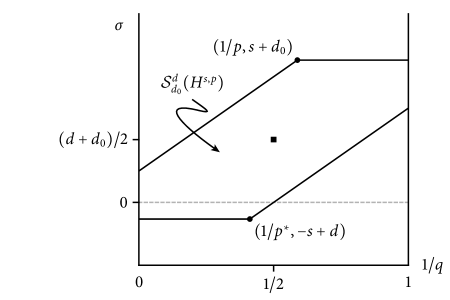
The second condition of (2.6) is a restriction on the Lebesgue regularity of and it is helpful to visualize after making the transformation since sets of constant Lebesgue regularity then appear as straight lines with slope as in Figure 1.
For any particular collection of parameters, it may be that is empty. The following result establishes when the set is nonempty and hence when an operator of class has a suitable collection of Bessel potential spaces to act on.
Lemma 2.8.
Suppose , and with . Then is nonempty if and only if
| (2.7) | ||||
| (2.8) |
If is non-empty then it contains , , and . Moreover, if , then we have the continuous inclusions of Fréchet spaces
| (2.9) |
Proof.
The intervals in (2.6) defining are non-empty if and only if and
which is equivalent to inequality (2.8). Moreover, if these intervals are nonempty, then and evidently belong to . To show that whenever this set is nonempty, define
Then so long as
| (2.10) |
and
| (2.11) |
Since is nonempty, and . Inequalities (2.10) and (2.11) are then consequences of the observations
and
The indices and correspond to the most regular and least regular spaces an operator in can naturally act on; indices yield spaces that lie intermediate between the two extreme spaces and . Indeed, one interpretation of Lemma 2.8 is that is nonempty exactly when includes . Alternatively, inequalities (2.7)–(2.8) are exactly the condition that includes , which highlights the importance of this -based space. In effect, Lemma 2.8 implies is nonempty exactly when it contains . For example, consider the case of a general second-order operator, so and . Then is non-empty when contains , the natural -based space for a weak existence theory. See also Figure 1, where the key -based space appears as a small square.
In addition to the mapping properties of described in Proposition 2.6 we require an analogous result for the commutator of with a smooth cutoff function .
Lemma 2.9.
Let be a bounded open subset of . Suppose , , and with . Let be an operator of class and let . Then extends from a map to a continuous linear map so long as . Moreover, if , the same result holds if .
Proof.
Suppose . A term of has the form
where and where and . The result in the case of general follows from a direct computation using these facts along with Theorem 2.5.
If , we can improve the result as follows. Let be with its zero-order term removed, so . Then and using the result just proved we find that the commutator maps so long as . But a routine computation shows that this condition is equivalent to and the claimed improvement follows since . ∎
2.2 Rescaling estimates
For a Schwartz function let . This rescaling operation extends to general tempered distributions by continuity and duality arguments, and we use the same notation when is a distribution. When is a non-negative integer, it is easy to see that is a continuous automorphism of for all . The same holds for for by interpolation, and for by an elementary duality argument.
In this section, we prove two principal estimates for the norms of rescaling operators, with bounds depending on along with the parameters of the function space being acted on. First, we have Proposition 2.10, which establishes the desired estimates for functions with integer-order differentiability. Then, using interpolation, we generalize the estimates to non-integer differentiability at the penalty of a mild loss of sharpness; this is the content of Proposition 2.17, which is the main result of this section. In fact, one can recover the sharpness using more sophisticated tools from Littlewood-Paley theory, and indeed we do for the broader class of Triebel-Lizorkin spaces in Section 3.2. Nevertheless, the less-than optimal estimates of Proposition 2.17 are sufficient to establish local elliptic regularity in the context of Bessel potential function spaces, and it permits a proof using only a minimal set of tools.
Proposition 2.10.
Suppose , and that is a Schwartz function on . There exists a constant such that for all and all
| (2.12) |
Specifically:
-
1.
Inequality (2.12) holds with
unless , in which case it holds for any choice of , with implicit constant depending on .
-
2.
If (in which case functions in are Hölder continuous) and if , then inequality (2.12) holds with
unless , in which case it holds for any choice of , with implicit constant depending on .
Proposition 2.10 is established in the following sequence of elementary results which treat specific subcases and supporting lemmas. Specifically, it is an immediate consequence of Corollary 2.13, Lemma 2.14 and Corollary 2.16 below. In applications, in Proposition 2.10 will be compactly supported and we are effectively interested in rescaling from a ball of radius up to a ball of fixed radius. Derivatives are dampened under this operation, and the role of is to control the zero-frequency terms; without the cutoff function, for all the optimal scaling would be instead.
We begin in the easier setting , in which case it turns out that the the cutoff function plays no role. When , we have the following consequence of the change of variables formula that the norm has straightforward scaling behavior for all .
Lemma 2.11.
Suppose , , and . Then
Turning to the case in Proposition 2.10, the proof proceeds via a duality argument, for which we need the following result concerning rescaling for with (rather than ).
Lemma 2.12.
Suppose and . For all and all ,
| (2.13) |
Proof.
The following corollary follows from duality from Lemma 2.12.
Corollary 2.13.
Suppose and . For all and all
Proof.
Using a density argument it is enough to establish the result when is smooth and compactly supported. For any test function ,
| (2.14) | ||||
Since and since , Lemma 2.12 implies
where the implicit constant is independent of and . Hence
which concludes the proof, noting that is the dual space of . ∎
Corollary 2.13 implies Proposition 2.10 in the case , for if is a Schwartz function We now turn to the more involved case of Proposition 2.10, .
Lemma 2.14.
Proof.
Repeated applications of the Gagliardo-Nirenberg-Sobolev inequality imply
| (2.16) |
where the implicit constant depends on ; since is fixed the explicit dependence is unimportant.
The second term on the right-hand side of equation (2.16) is easy to estimate. Using the identity Lemma 2.11 we find
Turning to the low order term, first consider the case . Sobolev imbedding implies and
Now suppose . Then Sobolev embedding implies where
Hölder’s inequality, the fact that lies in every Lebesgue space, and Lemma 2.11 imply
When we use the marginal case of Sobolev embedding and an argument similar to the above to conclude
for any . Taking sufficiently large we find inequality (2.15) holds for any choice of . ∎
Lemma 2.14 completes the proof of part (1) of Proposition 2.10, and the following two results establish part (2).
Lemma 2.15.
Let be a Schwartz function on and let . For all and all with ,
Proof.
We divide into three regions: the ball , the annulus and the exterior region . On the unit ball, since ,
To obtain the remainder of the estimate, pick a constant such that for all with . Then, letting be the volume of the unit sphere, we find on the annulus ,
| (2.17) | ||||
Taking roots establishes the desired estimate on .
Finally, for the exterior region we have
which completes the proof. ∎
Corollary 2.16.
Proof.
Following the argument of the beginning of the proof of Lemma 2.14 we know that
and that . Hence it suffices to show
Suppose first that . Then with . Since , Lemma 2.15 implies
On the other hand, if then lies in and the same argument shows
The result in the marginal case follows from a similar argument using the fact that embeds into for any . ∎
Having now established Proposition 2.10, we turn to its generalization to non-integer orders of differentiability. In fact, one can show that the statement of Proposition 2.10 generalizes without change, other than replacing with ; see Proposition 3.10 which establishes an extension of this fact to the broader class of Triebel-Lizorkin spaces. The following result is mildly weaker, but is easier to prove and is sufficient for our application establishing local elliptic regularity. The key difference is that the equal sign in the definition of the exponent in parts (1) and (2) of Proposition 2.10 has been replaced with a strict inequality.
Proposition 2.17.
Proof.
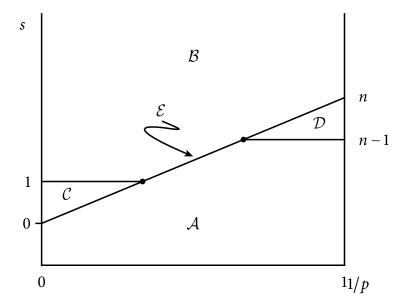
We divide the tuples in into the following regions (see Figure 2):
-
:
, , ,
-
:
, , ,
-
:
, ,
-
:
, ,
-
:
, .
Suppose and for the moment assume . If is an integer, the result follows from Proposition 2.10 so we can assume . There exist such that lies on the line joining and . That is,
for some . Since we conclude from Proposition 2.10 and interpolation applied to the map that
Replacing Proposition 2.10 with Corollary 2.13, the same technique works in region if and indeed the argument is simpler since we can select .
If and is an integer then Proposition 2.10 implies inequality (2.12) holds with . When is not an integer we can interpolate between and for appropriate choices of and to obtain the same result.
Next, suppose lies in the triangular region , so . Consider any with , so as well. Then
with . From interpolation we find
Noting that as we can take as close to from below as we please to conclude that inequality (2.19) holds with any fixed choice of . Note that this interpolation, and the one to follow for region , is the source of the loss of sharpness of the current proposition.
In the region the argument is similar to the argument for region ; we now interpolate between a point with and a point with in region taken arbitrarily close to the line . On the line segment the proof follows by interpolating between a point in region and a point region taken arbitrarily close to the line segment. This completes the proof of part (1).
2.3 Interior elliptic estimates
This section contains our principal elliptic regularity results, which are established in two steps. First, Proposition 2.20 shows that if an operator is elliptic at a single point, then elliptic regularity can be established for functions that are supported in a sufficiently small neighborhood near the point. The rescaling estimates of the previous section, along with a parametrix construction, are the key tools needed at this first stage. Theorem 3.21 then builds on Proposition 2.20 to obtain full interior regularity for elliptic operators using a partition of unity argument along with a bootstrap. The commutator estimates of Lemma 2.9 are the key technical used at this second stage.
Definition 2.18.
Let be an open subset of . Suppose and . An operator
of class is elliptic at if for every
is non-singular, where .
We have the following standard parametrix construction for homogeneous, constant coefficient elliptic operators.
Lemma 2.19.
Suppose is a constant coefficient elliptic differential operator. There exists maps and acting on tempered distributions supported on such that
-
•
is is continuous for all and ,
-
•
is continuous for all and ,
-
•
for all tempered distributions .
Proof.
Let be a smooth, compactly supported cutoff function that equals 1 in a neighborhood of zero. Define the parametrix on tempered distributions by , where is the Fourier transform. Similarly, let be the smoothing map . A computation shows for all tempered distributions.
Setting , the claimed continuity properties of follows from factoring the multiplier as
The continuity of the multiplier operator determined by the the first factor follows from the Mikhlin multiplier theorem whereas the second factor is handled by the definition of Bessel potential spaces.
The smoothing map has a compactly supported multiplier and its continuity properties follow from the same arguments as above, without restriction on the gain in derivatives. ∎
We now establish Proposition 2.20, the regularity result for functions supported in a sufficiently small region near a point where an operator is elliptic. The statement of this proposition requires notation for function spaces associated with compactly supported functions on a bounded open set , and there are two natural classes of spaces one can work with. The first is the closure of in . We find it more convenient to take the closure of in instead; following the notation of [Mc00] we denote this latter space by . An element in is, by definition, an element of and it is easy to see that it has support in . Moreover, if has support contained in a compact set , an easy argument using a cutoff function that equals 1 on and vanishes outside shows that there exists a unique with , and indeed one has the estimate with implicit constant depending on . Following standard practice we informally identify with its zero extension .
Proposition 2.20.
Let be a bounded open set. Suppose , , with , that , and that these parameters satisfy inequalities (2.7)–(2.8) of Lemma 2.8 and hence . Suppose additionally that is a differential operator of class and that for some that
is elliptic. Given there exists such that and such that if
then and
| (2.20) |
with implicit constant independent of but depending on all other parameters.
Proof.
It suffices to prove the result assuming and that . From the definition of Bessel potential spaces on bounded domains, we can further assume that the coefficients of have been extended to all of .
For each define
where
| (2.21) | ||||
Suppose for some and that . Recall that by definition . Moreover, is compactly supported in and hence defines an element of . In particular, we can treat and as distributions on and a short computation shows satisfies
as an equation in .
Pick a cutoff function that equals on a neighborhood of . Since is supported on ,
| (2.22) |
as well.
Let and be the parametrix and smoothing operator for from Lemma 2.19. Applying to equation (2.22) we have
| (2.23) |
It will be convenient to define and , in which case has the same continuity properties as in Lemma 2.19 and, using the compact support of , is a continuous map for all choices of .
Consider a coefficient of , . From Proposition 2.17, for any
| (2.24) |
Similarly, consider a coefficient of . Since when , and since , Proposition 2.17 implies
| (2.25) |
Pick with . Since in estimate (2.24) it follows that the coefficients of and converge to zero in the norms indicated on the left-hand sides of inequalities (2.24) and (2.25) as . Using the fact that these coefficients are compactly supported in a common bounded open set, a computation using Theorem 2.5 shows that converges to zero as an operator as for any choice of . Hence we may take sufficiently small so that has a continuous inverse that also maps and . Applying to equation (2.23) we conclude
and consequently
| (2.26) | ||||
Note that the implicit constants above depend on , but this dependence is unimportant since the smallness of has already be chosen. Since rescaling with fixed is a continuous automorphism of any Bessel potential space on we conclude
| (2.27) |
Estimate (2.20) follows from inequality (2.27) along with the fact that if for some has support on a fixed , then with implicit constants depending on . ∎
We now arrive at our main regularity result.
Theorem 2.21.
Proof.
The proof is a bootstrap that relies on the following main step. We have initially assumed that so that can be applied to it, and that for some . Suppose we know additionally that on some open set with that for some pair such that the commutator result Lemma 2.9 applies. Now consider a target level of regularity satisfying the following:
-
H1:
,
-
H2:
,
-
H3:
,
-
H4:
.
The first two conditions ensure via Sobolev embedding that is contained in and form a hard limit on the target regularity. The second two conditions ensure and limit the improvement in regularity that can be achieved on a single step of the bootstrap. We claim that under these hypotheses that for some open set such that and that we have the estimate
| (2.29) |
with implicit constant independent of .
To establish inequality (2.29) we first select an open set with . Since is compact we can select finitely many balls that cover and such that the conclusion of Proposition 2.20 holds for the pair . Using a partition of unity subordinate to the balls and we can find non-negative smooth functions compactly supported in such that on .
Consider
| (2.30) |
From conditions (H1:)–(H2:) and Sobolev embedding we know
| (2.31) |
Conditions (H3:)–(H4:) allow us to apply Sobolev embedding to the commutator term from equation (2.30) and we have
| (2.32) |
Since we have assumed that satisfies the conditions of Lemma 2.9 (i.e., either or and ), we have
| (2.33) |
Combining inequalities equalities (2.31), (2.32) and (2.32) we find and we conclude from Proposition 2.20 that and additionally
Inequality (2.29) now follows from the observation and summing on .
We now describe the bootstrap in the easier case when , where Lemma 2.9 has the fewest restrictions. The argument begins with and . Conditions (H1:)–(H2:) are an immediate consequence of the definition of the region and conditions (H3:)–(H4:) are obvious. Moreover, since , Lemma 2.9 applies. Hence all the conditions of the bootstrap step are met and we conclude there is an open set with such that
| (2.34) |
We now iteratively apply the bootstrap step through a finite sequence in described below that starts at and terminates at . At each step we ensure conditions (H1:)–(H4:) hold and obtain inequalities
| (2.35) |
for a sequence nested open sets . Because we have assumed that , and since each , we are assured that at each step we can use the commutator estimate from Lemma (2.9). Inequality (2.28) follows from chaining together the initial estimate (2.34) with the estimates (2.35) obtained along the bootstrap.
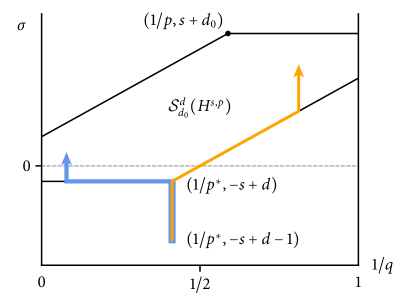
The specific sequence can be achieved as follows, starting from , in two cases depending on whether or not as depicted in Figure 3.
If we first lower by steps of at most until it has been lowered to . At this point we raise by steps of at most until it has been raised to . Note that at each step ,
and hence the sequence remains in as is required to apply Lemma 2.9. These same inequalities also show that conditions (H1:)–(H2:) are maintained at each step. Moreover, conditions (H3:)–(H4:) hold because we either fix and lower by at most or we fix and raise by at most .
Now suppose . Since , we can lower to a value such that the inequality becomes an equality. We now start the bootstrap by raising to at each step while simultaneously raising so that the value remains invariant. This stage ends when . We then increase while leaving fixed as in the earlier argument when . The first stage of the sequence has and
Hence for this first part of the sequence the terms lie in and additionally conditions (H1:)–(H2:) are maintained. Moreover, condition (H3:) is enforced because we raise by at most , and condition (H4:) is satisfied because it is an equality during this first stage where we lower . The same argument as in the case when then shows that conditions (H1:)–(H4:) hold in the second stage when we raise while leaving fixed. The proof is now complete in event that .
We now turn to the case where the bootstrap requires more care because the hypotheses of Lemma 2.9 are more restrictive. Consider the case . If , we can simply apply the earlier result, so it suffices to assume but . Because we can define a point in determined by and the following rules:
-
1.
If , leave fixed but raise by at most to such that .
-
2.
If and , lower by at most 1 to while simultaneously lowering by at most so that the Lebesgue regularity is unchanged.
-
3.
Otherwise, satisfies and
and we set .
In each of these cases is contained in by Sobolev embedding, so we can apply the original bootstrap for to get to . Since a computation shows and hence the commutator result Lemma 2.9 can be applied at . One verifies that in all three cases listed above, the target regularity satisfies conditions (H1:)-(H4:) when starting from and we can apply the bootstrap step exactly once to arrive at . This proves the result when , and iterating this argument obtains the proof for any value of . ∎
3 Coefficients in Triebel-Lizorkin Spaces
This section generalizes the results of Section 2 to operators having coefficients in Triebel-Lizorkin spaces, which are defined defined in terms of Littlewood-Paley projection operators. Let be a smooth radial bump function that equals on and vanishes outside of and let , so if or . For we define the Littlewood-Paley projections and
We also use the notation for .
Let and . Given a tempered distribution , each is an analytic function on and a tempered distribution belongs to the Triebel-Lizorkin space if
We call the Lebesgue parameter, whereas is the fine parameter. Bessel potential spaces are Triebel-Lizorkin spaces with fine parameter and, as recalled in the following section, Sobolev-Slobodeckij spaces are also special cases of Triebel-Lizorkin spaces with either or . Just as for Bessel potential spaces, on an open set , consists of the restrictions to of distributions in to and is given the quotient norm. The text [Tr10] contains a comprehensive description of Triebel-Lizorkin spaces, and indeed considers a wider set of parameters than those we employ here.
Embedding properties for Triebel-Lizorkin spaces follow those for Bessel potential spaces with the following rule of thumb: when a loss of derivatives is involved, the fine parameter has no role. Specifically, we recall the following results summarizing [Tr10] Proposition 2.3.2/2 and Theorems 2.7.1 and 3.3.1 along with [Tr78] Theorems 2.8.1 and 4.6.1; the notation denotes a continuous inclusion of space into space . Note that here and elsewhere when we quote established results, we restrict the range of the parameters to even when they apply with greater generality.
Proposition 3.1.
Assume and , and suppose is a bounded open set in .
-
1.
If then and .
-
2.
If then and .
-
3.
If then .
-
4.
If and then .
-
5.
If and then .
-
6.
If then and .
Note that for bounded open sets , [Tr10] and [Tr78] proves these embedding properties under the the addition hypothesis that is a domain. The results for arbitrary bounded open sets follow as a corollary using the quotient space definition of the relevant spaces.
Complex interpolation of Triebel-Lizorkin spaces is described in [Tr10] Theorems 2.4.7 and 3.3.6.
Proposition 3.2.
Assume and , and suppose is either or is a bounded domain in . For ,
where
Duality of spaces of functions on follows from [Tr10] Theorem 2.11.2. Duality for Lipschitz bounded domains can be found in [Tr02], but the theory is more complex and we have avoided its use in our arguments; see, e.g., Proposition A.7.
Proposition 3.3.
Assume and . The bilinear map given by extends to a continuous bilinear map where and . Moreover, is a continuous identification of with .
3.1 Mapping properties
Operators with coefficients in Triebel-Lizorkin spaces are defined analogously to those of Definition 2.4.
Definition 3.4.
Suppose with . A differential operator on an open set of the form
is of class for some , and if each
We have the following multiplication rules for Triebel-Lizorkin spaces that generalize the rules found in Theorem 2.5. A self-contained proof is given in Appendix A.
Theorem 3.5.
Let be a bounded open subset of . Suppose and . Let and be defined by
Pointwise multiplication of functions extends to a continuous bilinear map so long as
| (3.1) | ||||
| (3.2) | ||||
| (3.3) | ||||
| (3.4) | ||||
| (3.5) |
with the the following caveats:
-
•
Inequality (3.5) is strict if .
-
•
If for some then .
-
•
If then .
-
•
If then for .
Proposition 3.6.
Let be a bounded open set in . Suppose , , and with . An operator of class extends from a map to a continuous linear map so long as
| (3.6) | ||||
and so long as:
-
•
If then .
-
•
If then .
Moreover, operators in depend continuously on their coefficients .
Note that in the Bessel potential case, in Proposition 3.6 and the supplemental conditions at and are always satisfied. We have the following generalization of Definition 2.7.
Definition 3.7.
The proof of Lemma 2.8 generalizes to the Triebel-Lizorkin context with minimal changes, using Proposition 3.1 for facts about Sobolev embedding. The only interesting difference is that the marginal conditions at the end of Proposition 3.6 adds an additional condition when is the smallest possible value such that is nonempty.
Lemma 3.8.
Suppose , and with . Then is nonempty if and only if
| (3.7) | ||||
| (3.8) |
with the additional condition in the marginal case . If is non-empty then it contains , , and . Moreover, if , then we have the continuous inclusions of Fréchet spaces
| (3.9) |
Just as in the Bessel potential case, if an operator of class is compatible with any indices at all, it acts on a compatible -based Bessel potential space, .
The following commutator result generalizes Lemma 2.9.
Lemma 3.9.
Suppose , , and with . Let be an operator of class and let . Then extends from a map to a continuous linear map so long as . Moreover, if , the same result holds if .
Proof.
The proof in the case of general is a computation that follows the analogous part of the proof of Lemma 2.9. The only difference is that there are fine parameter restrictions that need to be checked. In the notation of Theorem 3.5, nontrivial restrictions could happen when , when and when . One readily verifies that under the given hypotheses that cannot happen and that in the remaining cases the fine parameter restrictions are always met.
If the proof again follows the strategy of Lemma 2.9. First we observe that where is with its constant term eliminated. Using the case already proved we have continuity so long as , and computation shows that if then . ∎
3.2 Rescaling estimates
In this section we show that the rescaling estimates of Proposition 2.10 carry over to Triebel-Lizorkin spaces.
Proposition 3.10.
Suppose , and that is a Schwartz function on . There exists a constant such that for all and all
| (3.10) |
Specifically:
-
1.
Inequality (3.10) holds with
unless , in which case it holds for any choice of , with implicit constant depending on .
-
2.
If (in which case functions in are Hölder continuous) and if with , then inequality holds with
unless , in which case it holds for any choice of , with implicit constant depending on .
The remainder of this section is an extended proof of this result, and relies on the following elementary facts from Littlewood-Paley theory.
Proposition 3.11.
Let .
-
1.
If is a Schwartz function then for any ,
with implicit constant independent of and but depending on and .
-
2.
There exist Schwartz functions such that for any tempered distribution ,
with convolution and scaling interpreted in the distributional sense.
-
3.
For all , , and
Here is the Hardy-Littlewood maximal operator and the implicit constants are independent of , and .
-
4.
For any sequence of functions in ,
-
5.
Let and . For all ,
-
6.
(Littlewood-Paley Trichotomy) Suppose and . Given ,
unless one of the following three conditions holds:
-
•
and ,
-
•
and ,
-
•
and .
-
•
Part (1) is a consequence of the definition of the projection operator and elementary properties of the Fourier transform. The proof of parts (2) and (3) can be found in the approachable lecture notes [Ta01], weeks 2/3. Part (4) in full generality follows from the Fefferman-Stein inequality [FS71] together with part (3). We note, however, that the cases of greatest interest (Bessel potential spaces and Sobolev-Slobodeckij spaces) only involve the cases and , which do not require the full power of [FS71]. The lecture notes [Ta01] contain a proof of part (4) when , and the result when is an easy consequence of part (3) and the Hardy-Littlewood maximal inequality. Part (5) follows from the definition of the norm, part (2) and embedding . Part (6) is just a computation based on the supports of convolutions of functions used to define Littlewood-Paley projection; see [Ta01] for a related statement. Note that there is an artificial asymmetry in part (6) between and , and symmetry can be restored at the expense of increasing the number of cases.
As for Bessel potential spaces, rescaling is a continuous automorphism of any space ; for this is a straightforward consequence of the Closed Graph Theorem, using the fact that rescaling is continuous acting on , whereas for and the result follows from duality and interpolation respectively. We initially require the following basic estimate for the norms of the rescaling maps.
Lemma 3.12.
Let , and suppose and . Then
for all and all .
Proof.
Recall the cutoff functions and used to define the Littlewood-Paley projection operators and define
A computation shows that for ,
where and where
From the bound we can find independent of such that
with the convention that for . Hence
Using [Tr10] Theorem 1.6.3 via the same argument as in [Tr10] Proposition 2.3.2/1 we find
with implicit constant independent of . Recalling that the result now follows from the obvious uniform bounds on rescaling in for . ∎
We now proceed with the proof of Proposition 3.10 part (1) is broken into three cases depending on whether , , or . We begin with and first establish the following technical lemma, which is needed to control high frequency rescaling.
Lemma 3.13.
Suppose . For all and all ,
Proof.
Suppose first that for some . An easy computation from the definition of the Fourier transform and change of variables shows for each ,
for all Schwartz functions , and hence also for all . But then
This completes the proof in the case . The general case follows from the consequence of Lemma 3.12 that that is uniformly bounded in for . ∎
Proposition 3.14.
Suppose and , and let be a Schwartz function. For all and ,
| (3.11) |
where
| (3.12) |
unless , in which case can be any (fixed) negative number. The implicit constant in (3.11) depends on is independent of and .
Proof.
We first assume that and define according to equation 3.12. Since , Proposition 3.11 part (5) implies
| (3.13) |
To estimate the first term on the right-hand side of inequality (3.13) first consider the case . Define by
| (3.14) |
and observe that since and since , we have . Proposition 3.1 implies embeds in . From Hölder’s inequality we find
where . Hence, from Lemma 2.11
and we conclude . On the other hand, if then
Hence in both cases, .
Turning to the second term on the right-hand side of inequality (3.13) we introduce the notation
The Littlewood-Paley trichotomy, Proposition 3.11 part (6), implies
| (3.15) |
and we estimate the contributions from each of these three terms individually via the triangle inequality.
Starting with the high-low term, Proposition 3.11 parts (4) and (3) imply
where is the Hardy-Littlewood maximal operator. Now suppose and pick according to equation (3.14). Then Hölder’s inequality and the triangle inequality imply
where again . The Hardy-Littlewood maximal inequality and Lemma 2.11 then imply , which yields the desired estimate
Obtaining this same inequality in the case is similar but easier, using the estimate
along with the fact .
The proof of Proposition 3.10 part (1) when uses a duality argument analogous to that used for the same step in Section 2.2. First, the following generalization of Lemma 2.12 follows from [Tr10] Proposition 3.4.1/1, which is proved similarly to Lemma 3.13.
Lemma 3.15.
Suppose , and . For all and all ,
| (3.16) |
The following corollary, which completes the case of part (1), is proved identically to Corollary 2.13 using the duality property of Proposition 3.3.
Corollary 3.16.
Suppose and . For all and all
Proposition 3.10 part (1) has now been established except for the case , which follows from the following easy interpolation argument.
Lemma 3.17.
Suppose . For all and all ,
Proof.
With the proof of Proposition 3.10 part (1) now complete we turn to part (2), the improved estimate when . The following estimate is the key to controlling low-frequency interactions near .
Lemma 3.18.
Suppose for some and that . For all and all
Proof.
Proposition 3.19.
Suppose and , and let be a Schwartz function. For all with , and for all ,
| (3.19) |
where
| (3.20) |
unless , in which case can be any (fixed) number less than 1. The implicit constant in (3.19) depends on but is independent of and .
Proof.
We start by assuming and define according to equation (3.20). Hence embeds in .
As in the proof of Proposition 3.14 we start from the estimate
| (3.21) |
The second term on the right-hand side is again estimated using the Littlewood-Paley trichotomy (equation (3.15)) and the proof of Proposition 3.14 shows that the low-high and high-high terms of that decomposition satisfy a bound of the form , regardless of the value of at zero. Consequently, we need only estimate the effects of the low-frequency contributions from , namely the high-low term, as well as .
For the low-high term, let and hence Lemma 3.18 implies for all . Recalling the notation , Proposition 3.11 part 4 and Lemma 3.18 imply
| (3.22) | ||||
where . Since is a Schwartz function, Proposition 3.11 part (1) implies that given we can estimate
with implicit constant independent of . As a consequence, ; i.e., is rapidly decreasing.
To estimate we divide into three regions: the ball , the annulus and the exterior region . On the unit ball and hence
| (3.23) |
Outside the unit ball, and So
| (3.24) |
Finally, for the exterior region we estimate and find
| (3.25) |
Combining inequalities (3.23), (3.24) and (3.25) we conclude which, when combined with inequality (3.22), completes the estimate for the low-high term.
It remains to show that . The argument that showed only used the fact that was rapidly decreasing, and hence we also find . Again using the estimate we obtain
This concludes the proof assuming . For the marginal case, let denote the closed subspace of ) consisting of functions that vanish at zero, assuming of course that . The proof when follows from interpolation if we can show
| (3.26) |
assuming that for and that and .
3.3 Interior elliptic estimates
Elliptic operators for operators with coefficients in Triebel-Lizorkin spaces are defined analogously to Definition 2.18. This section contains our primary elliptic regularity result,
which relies on the following generalization of the rescaling estimates of Proposition 2.10. The proof of these estimates is a little involved, so we record the result for now and defer the proof to Section 3.2.
The “regularity at a point” result, Proposition 2.20, admits a straightforward generalization. Note that denotes the closure of in .
Proposition 3.20.
Let be a bounded open set. Suppose , , that with , that , and that the conditions of Lemma 3.8 are are satisfied and hence . Suppose additionally that is a differential operator of class and that for some that
is elliptic. Given there exists such that and such that if
then and
| (3.27) |
with implicit constant independent of but depending on all other parameters.
Proof.
The proof is essentially the same as the proof of Proposition 2.20, with the following notes:
- 1.
- 2.
-
3.
Fine parameters need tracking, but the changes are straightforward. When the Lebesgue parameter is the fine parameter is , when the Lebesgue parameter is the fine parameter is and for the intermediate spaces the Lebesgue parameter is and the fine parameter is .
∎
The proof of the main interior regularity result for Bessel potential spaces, Theorem 2.21, carries over to the Triebel-Lizorkin setting. The bulk of the new work consists of tracking the fine parameter.
Theorem 3.21.
Proof.
The proof follows that of Theorem 2.21 with the following changes needed to manage the fine parameter.
A bootstrap step starts with knowing for some open set containing and we wish to improve these parameters to while shrinking . We assume:
-
H1:
,
-
H2:
,
-
H3:
,
-
H4:
,
-
H5:
if then ,
-
H6:
if then .
Hypotheses (H1:)–(H4:) are exactly those of Theorem (2.21) expressed in terms of the notation of the current result. Condition (H5:) is needed additionally to ensure . Similarly (H6:) is the extra hypothesis needed to ensure . If we additionally assume that satisfies the conditions of Lemma 3.9 so that its commutator estimate applies, the bootstrap step argument of Theorem 2.21 then goes through with obvious changes and we obtain an open set with such that along with the estimate
Now consider the bootstrap in the case where we pass through a sequence of regularity parameters starting from ; we need not track the shrinking open sets. Focusing for the moment only on the parameters and , the bootstrap consists of three distinct stages:
-
1.
The initial step arriving at .
-
2.
A low regularity stage that either
-
•
preserves while lowering by at most per step, or
-
•
preserves the Lebesgue regularity at the low value while raising by at most 1 per step.
At the end of the low regularity stage and .
-
•
-
3.
A derivative improving stage where is fixed and is raised by at most 1 per step until arriving at its final value.
We now discuss the sequence of fine parameters , which will in fact be set to throughout the sequence just described except at the last step, where it is set to its desired value.
-
1.
The initial stage starts at and wish to improve to . Because , the commutator result Lemma 3.9 applies. Hypotheses (H1:)–(H4:) hold for the same reasons as in Theorem 2.21. At this step, hypothesis (H5:) reads “if = then ”, which is satisfied by the definition of . Finally, hypothesis (H8:) holds trivially. Thus this first bootstrap step is justified.
-
2.
During the low regularity stage we again preserve at every step. This is justified as follows for the two possibilities:
-
•
Consider a step where and where is lowered by at most . Conditions (H1:)–(H4:) are met for the same reasons as in Theorem (2.21) and condition (H8:) is met trivially. Condition (H7:) is a restriction only if , in which case it requires ; this condition is met by the definition of . We also need to ensure that the commutator estimate can be employed, which can be done by showing that . In fact, the definition of permits the fine parameter to be along the line , even in the marginal case where the region collapses to a line segment. The remainder of the justification of the commutator estimate is the same as in Theorem 2.21.
-
•
Consider a step where the Lebesgue regularity is preserved at the low value . and where is raised by at most 1; without loss of generality we can assume we raise by less than 1. Hypotheses (H1:)–(H4:) are met for the same reasons as in Theorem 2.21. Condition (H6:) is always met because of our additional restriction on the step size. Condition (H7:) only comes into play if we are raising to its terminal value, in which case we also set the fine parameter to its terminal value (and stop the bootstrap). We need to ensure that each non-terminal lies in in order to apply the commutator estimate, but this is ensured because a fine parameter value of is always permitted along this line of Lebesgue regularity.
-
•
-
3.
On a step where we raise and leave fixed at its terminal value we can again assume we raise by less than 1. Throughout this stage we again leave fixed at except at the very last step. There are no fine parameter restrictions that arise to allow the commutator estimate to apply, and hypotheses (H1:)–(H4:) hold for the same reasons as in Theorem (2.21). Hypothesis (H6:) is always met because of our restriction on the step size and hypothesis (H7:) only comes into play at the final step, where we meet it by setting to its terminal value .
At this point of the procedure we have arrived at the desired parameters , except in the marginal case in which case we are at . Since , the definition of implies and we can use this inequality to confirm that conditions (H1:)–(H8:) hold if we perform one more bootstrap step to improve the fine parameter to its desired value ; note that the commutator result Lemma (3.9) is available for this bootstrap step since .
Now consider the case where . As in Theorem 2.21 it suffices to consider assume but . Starting from we define by setting and then applying the following rules:
-
1.
If , leave fixed but raise by at most to such that .
-
2.
If and , lower by at most 1 to while simultaneously lowering by at most so that the Lebesgue regularity is unchanged.
-
3.
Otherwise, satisfies and
and we set .
Note that we set to satisfy the fine parameter restriction on when . In all of these three cases, is contained in and we can therefore apply the bootstrap to arrive at . Since , a computation shows that and hence the commutator result from Lemma 3.9 can be applied starting from . Hence we can apply one round of the bootstrap starting from to arrive at so long as hypotheses (H1:)–(H6:) are met. The first four are satisfied for the same reasons as in Theorem 2.21 and (H5:) is satisfied trivially since . Finally, (H6:) is a restriction only if , in which case . But then, since , we have assumed and hence . So we are not changing the fine parameter and condition (H6:) is met. This completes the proof when , and the result for higher values of follows from iterating this argument. ∎
4 Coefficients in Sobolev-Slobodeckij Spaces
Sobolev-Slobodeckij spaces of functions on an open set are special cases of Triebel-Lizorkin spaces as follows:
Hence the results of Section 3 specialize to statements about Sobolev-Slobodeckij spaces, which we briefly record here.
Definition 4.1.
Suppose with . A differential operator on an open set of the form
is of class for some and if each
Theorem 4.2.
Suppose and . Let and be defined by
Pointwise multiplication of functions extends to a continuous bilinear map so long as
| (4.1) | ||||
| (4.2) | ||||
| (4.3) | ||||
| (4.4) | ||||
| (4.5) | ||||
with the the following caveats:
-
•
Inequality (4.5) is strict if .
-
•
If , then , .
-
•
If and then .
Proposition 4.3.
Let be a bounded open subset of . Suppose , , and with . An operator of class extends from a map to a continuous linear map so long as
| (4.6) | ||||
and so long as:
-
•
If and then .
-
•
If and then .
Moreover, operators in depend continuously on their coefficients .
Definition 4.4.
Lemma 4.5.
Suppose , and with . Then is nonempty if and only if
| (4.7) | ||||
| (4.8) |
with the additional condition when that in the marginal case . If is non-empty then it contains , , and . Moreover, if , then we have the continuous inclusions of Fréchet spaces
| (4.9) |
5 Coefficients in Besov Spaces
We establish results for operators with coefficients in Besov spaces, mirroring the developments of the preceding sections. Recall from Section 3 the Littlewood-Paley projectors and . Let and . A tempered distribution belongs to the Besov space if
| (5.1) |
On an open set , the space consists of the restrictions of distributions in to and is given the quotient norm.
Embedding properties of Besov spaces can be found in [Tr10] Proposition 2.3.2/2, and Theorems 2.7.1 and 3.3.1 along with [Tr78] Theorems 2.8.1 and 4.6.1; we summarize these in the following proposition. The important distinction here from Triebel-Lizorkin spaces is that when performing Sobolev embedding, the fine parameter cannot be improved if the Lebesgue regularity stays fixed. This phenomenon is the source of many of the additional fine parameter restrictions in this section beyond those of Section 3.
Proposition 5.1.
Assume and , and suppose is a bounded open set in .
-
1.
If then and .
-
2.
If then and .
-
3.
If then .
-
4.
If and then and .
-
5.
If and then .
-
6.
If then and .
As noted previously following Proposition 3.1, although [Tr10] and [Tr78] only prove the embedding results above for bounded domains when the boundary is smooth, the result for arbitrary bounded open sets is an easy corollary.
Complex interpolation of Besov spaces ([Tr10] Theorems 2.4.7 and 3.3.6) follows the same pattern as for Triebel-Lizorkin spaces.
Proposition 5.2.
Assume and , and suppose is either or is a bounded domain in . For ,
where
Duality for Besov spaces of functions on is analogous to that for Triebel-Lizorkin spaces; see [Tr10] Theorem 2.11.2.
Proposition 5.3.
Assume and . The bilinear map given by extends to a continuous bilinear map . Moreover, is a continuous identification of with .
5.1 Mapping properties
As for the other function spaces, mapping properties of differential operators depend on the rules for multiplication in Besov spaces. We recall the relevant result here, and give a self-contained proof in Appendix B.
Theorem 5.4.
Let be a bounded open subset of . Suppose and . Let and be defined by
Pointwise multiplication of functions extends to a continuous bilinear map so long as
| (5.2) | ||||
| (5.3) | ||||
| (5.4) | ||||
| (5.5) | ||||
| (5.6) |
with the following caveats:
-
•
If or for some then .
-
•
If or then .
-
•
If equality holds in (5.6) then
-
.
-
If then and .
-
If has the same sign as for some then .
-
If has the same sign as for some then .
-
If then and for both .
-
-
•
If then and for both .
The list of caveats above is extensive in comparison with Theorem 3.5, but the bulk of these occur when inequality (5.6) is not strict, and we do not encounter this edge case in our applications.
Operators with coefficients in Besov spaces are defined analogously to those of Definition 2.4.
Definition 5.5.
Suppose with . A differential operator on an open set of the form
is of class for some and if each
Theorem 5.4 implies the following. Notably, in the computations that lead to this result, the caveats of Theorem 5.4 concerning the edge cases and never occur.
Proposition 5.6.
Let be a bounded open subset of . Suppose , , and with . An operator of class extends from a map to a continuous linear map so long as
| (5.7) | ||||
and so long as:
-
•
If or then .
-
•
If or then .
Moreover, operators in depend continuously on their coefficients .
We have the following generalization of Definition 2.7.
Definition 5.7.
The analogue of Lemma 2.8 in the Besov context is the following.
Lemma 5.8.
Suppose , and with . Then is nonempty if and only if
| (5.8) | ||||
| (5.9) |
with the additional condition in each of the marginal cases and . If is non-empty then it contains , , and . Moreover, if , then we have the continuous inclusions of Fréchet spaces
| (5.10) |
The following commutator result is the analogue of Lemma 3.9
Lemma 5.9.
Suppose , , and with . Let be a bounded open subset of and let be an operator of class . If then extends from a map to a continuous linear map so long as . Moreover, if , the same result holds if .
Proof.
The proof is a computation using Theorem 5.4 that parallels that of Lemma 3.9. The only difference is that there are three additional fine parameter restrictions that arise. In the notation of Theorem 5.4, these occur when , when and when . Under the given hypotheses, the last of these conditions never occurs, and in remaining two cases the fine parameter restrictions are met for the same reasons as the analogous restrictions are met when and when in Lemma 3.9. ∎
5.2 Rescaling estimates
The same argument used for Triebel-Lizorkin spaces shows that rescaling is a continuous automorphism of Besov spaces, and we wish to generalize the associated estimates of Theorem 3.10 to the Besov setting. This could be accomplished by suitably modifying the arguments of Section 3.2, but we can prove the desired results as a corollary of the Triebel-Lizorkin estimates using the following real interpolation property, which follows from [Tr10] Theorem 2.4.2.
Proposition 5.10.
Assume and with . Suppose and let . Then
Proposition 5.11.
Suppose , and that is a Schwartz function on . There exists a constant such that for all and all
| (5.11) |
Specifically:
-
1.
Inequality (5.11) holds with
unless , in which case it holds for any choice of , with implicit constant depending on .
-
2.
If (in which case functions in are Hölder continuous) and if with , then inequality holds with
unless , in which case it holds for any choice of , with implicit constant depending on .
Proof.
Suppose . Pick such that as well, and let . From real interpolation with endpoints and along with Proposition 3.10 we find
A similar and easier proof works when and the marginal case can be handled by interpolation between endpoints with differentiability and taken arbitrarily close to , as in the proof of Proposition 2.17.
For the improved estimate in the Hölder continuous case, we let be the closed subspace of of functions that vanish at , assuming of course that . The spaces are defined similarly. The same argument as at the end of the proof of Proposition 3.19 shows that
| (5.12) |
assuming that for and that and . Using this interpolation property, the proof of the improved estimate now follows exactly as in the generic case. ∎
5.3 Interior elliptic estimates
Elliptic operators with Besov space coefficients are defined analogously as in Definition 2.18. The following “regularity at a point” result is proved identically as for Proposition 3.20, using the fact that the parametrix result Lemma 2.19 is proved identically for Besov spaces. Note that denotes the closure of in .
Proposition 5.12.
Let be a bounded open set. Suppose , , that with , that , and that the conditions of Lemma 5.8 are are satisfied and hence . Suppose additionally that is a differential operator of class and that for some that
is elliptic. Given there exists such that and such that if
then and
| (5.13) |
with implicit constant independent of but depending on all other parameters.
With the previous proposition established, local elliptic regularity is proved using the same techniques as in Theorem 3.21, taking into account extra fine-parameter restrictions that arise for Besov spaces.
Theorem 5.13.
Proof.
The proof very closely follows that of Theorem 3.21, and we list here the additional steps needed to further manage the fine parameter.
In addition to conditions (H1:)–(H6:) from that proof, the bootstrap step requires two more hypotheses to ensure the needed embeddings:
-
H7:
if then ,
-
H8:
if then .
For the stages of the main bootstrap for from Theorem 3.21 we make the following adjustments
- 1.
-
2.
During the low regularity stage we again preserve .
-
•
If we preserve and lower we can arrange to do so by less than . In this case hypothesis (H8:) is met automatically. Hypothesis (H7:) only applies if and only on the last step where we lower , in which case we set the fine parameter to its final value (satisfying (H7:)) and the bootstrap stops. All other aspects of this stage are justified identically to Theorem 3.21.
-
•
If we preserve the Lebesgue regularity and raise then hypothesis (H8:) is met automatically. Hypothesis (H7:) provides a restriction only if , in which case we have assumed from the definition of and condition (H7:) is met. We need to ensure that the iterates all remain in in order for the commutator result Lemma 5.9 to apply. Indeed, the line of Lebesgue regularity is associated with a fine parameter restriction, but it is always met by keeping .
-
•
-
3.
In the final stage we raise (by less than 1 per iteration) while keeping . Again we preserve except at the final step. Hypothesis (H8:) is met because of the step size restriction and hypothesis (H7:) is a restriction only at the last step, at which point it is satisfied by setting the fine parameter to its terminal value .
At the end of this procedure, the bootstrap has stopped at its desired value except in the two marginal cases and , in which case we have arrived at . In both these cases the definition of ensures that . Using this inequality, one readily verifies that hypotheses (H1:)–(H8:) hold if we perform one more bootstrap step to improve the fine parameter to its final value . As in the proof of Theorem 3.21, one needs to verify that the starting regularity for the bootstrap lies in so as to use the commutator result Lemma 5.9, but this is always met for the fine parameter on the two marginal lines and . This completes the proof when .
Now consider the case . Arguing as in Theorem 3.21, we can apply the bootstrap to arrive at some where and where is obtained from as follows:
-
1.
If , leave fixed but raise by at most to such that .
-
2.
If and , lower by at most 1 to while simultaneously lowering by at most so that the Lebesgue regularity is unchanged.
-
3.
Otherwise, satisfies and
and we set .
Note that we set to ensure that the fine parameter restrictions of along the lines and are met. Since embeds in we can initially apply the bootstrap to arrive at . At this point we wish to apply a single bootstrap step to terminate at . Since a computation shows and hence the commutator Lemma 5.9 is available starting from . Hence we can perform the desired bootstrap step if we show that hypotheses (H1:)–(H8:) hold with and .
Conditions (H1:)–(H4:) hold for the same reasons as in Theorem 2.21 and conditions (H5:) and (H7:) hold trivially since we are setting the fine parameter to . Condition (H6:) holds for exactly the same reason as in Theorem 3.21. Finally, condition (H8:) implies a restriction only in cases (1) and (3) and only when . But then is a spot where the fine parameter restriction holds and hence already. Hence condition (H8:) is met.
This concludes the proof when and the result holds for higher values of by iterating this argument. ∎
Appendix A Multiplication in Triebel-Lizorkin Spaces
We prove the multiplication rules for Triebel-Lizorkin spaces, Theorem 3.5, which we restate here for convenience.
Theorem 3.5.
Let be a bounded open subset of . Suppose and . Let and be defined by
Pointwise multiplication of functions extends to a continuous bilinear map so long as
| (A.1) | ||||
| (A.2) | ||||
| (A.3) | ||||
| (A.4) | ||||
| (A.5) | ||||
with the the following caveats:
-
•
Inequality (A.5) is strict if .
-
•
If for some then .
-
•
If then .
-
•
If then for .
The proof is broken into a number of cases depending on the value of . Propositions A.5 and A.6 cover the case , Proposition A.7 is the case and the remaining case is the content of Proposition A.8.
These results all build on the following two lemmas, which concern multiplication of spaces having the same number of derivatives and the same fine parameter, but where the Lebesgue parameters vary. The lemmas employ the same elementary Littlewood-Paley techniques used in Section 3.2.
Lemma A.1.
Suppose , , and . Given and , both supported in for some , and
The implicit constant depends on , , and but is independent of and .
Proof.
Since , Proposition 3.11(5) implies
For the low frequency component we use the fact that and Proposition 3.1 twice to conclude
Turning to the high-frequency component we use the Littlewood-Paley trichotomy Proposition 3.11(6), to conclude for any
| (A.6) |
where . For the low-high contributions we use Proposition 3.11 parts (4) and (3) to conclude
Since , . Moreover the triangle inequality implies
and we conclude that the low-high interactions are controlled by .
To analyze the high-low term we set
and observe that since , . The estimate now proceeds similarly to the low-high case: using Proposition 3.11 parts (4) and (3) along with Hölder’s inequality and the Hardy-Littlewood maximal inequality we find
Since we have
So Sobolev embedding and the bounded support of imply
with implicit constant depending on the radius of support. We conclude that the low-high terms are controlled by .
Lemma A.2.
Suppose , , and . Suppose moreover that
| (A.7) |
Given and , both supported in for some , and
The implicit constant depends on , , , and but is independent of and .
Proof.
To estimate the low frequency term define
| (A.8) |
and observe by inequality (A.7) and the hypothesis . Sobolev embedding and the fact that is supported on then imply
| (A.9) |
and we conclude from Hölder’s inequality
As in the proof of Lemma A.1 the high-frequency term is split into three terms using the Littlewood-Paley trichotomy, Proposition 3.11(6); see equation (A.6). For the low-high contributions we use Proposition 3.11 parts (4) and (3) together with the Hardy-Littlewood maximal inequality to obtain
where is again defined as in (A.8). From inequality (A.9) we conclude that the low-high interactions are controlled by .
The estimate for the high-low contributions proceeds identically to that for the low-high contributions with the minor change that in equation (A.8) we replace with .
Having established the technical core of the theory, it remains for us to build a conveniently accessible interface in the form of Theorem 3.5. We now turn to a sequence of results that prove the theorem by cases based on the sign of , and for brevity we establish the following standing hypothesis.
Assumption A.3.
Suppose
-
•
is a bounded domain,
-
•
,
-
•
,
-
•
.
Moreover, define
Note, in particular, that Assumption A.3 supposes that has a smooth boundary. This hypothesis is made for convenience, and the proof of Theorem 3.5 follows for general bounded domains from the smooth case using a straightforward extension argument based on the quotient space definition of the relevant spaces.
The following result is mostly a translation of Lemmas A.1 and A.2 into the hypotheses of Theorem 3.5.
Proposition A.4.
Assume the multiplication hypothesis A.3 and that and . Pointwise multiplication of functions extends to a continuous bilinear map so long as
| (A.10) | ||||
| (A.11) |
with the final inequality strict if .
Proof.
Using an elementary extension and cutoff function argument, it suffices to show
| (A.12) |
whenever and are supported in for some .
Suppose . Without loss of generality, we can assume . Suppose . Since it follows that and Lemma A.1 together with Proposition 3.1 implies
Finally, consider the threshold case , so . We have therefore also assumed and can lower and slightly to and so that
| (A.13) |
remains true. Notice that , and hence inequality (A.13) also implies . We have therefore already established continuity of multiplication and the result follows from the continuous embedding ∎
Using Sobolev embedding we can now relax the requirement and , noting that a fine parameter restriction arises if for some .
Proposition A.5.
Proof.
First, suppose . Define by
Since ,
so by Sobolev embedding (Proposition 3.1) we have
Note that this is the point where we used the caveat if . Because the value of is preserved in the transition from to , the hypotheses of Proposition A.4 are satisfied and we have continuity of multiplication .
Now suppose ; without loss of generality we can assume and therefore . Using the hypotheses , and if we know from Sobolev embedding that . Hence it suffices to prove that multiplication is continuous
Proposition A.4 implies multiplication is continuous
if satisfies
| (A.17) | ||||
Hence we need only show that embeds into for some satisfying conditions (A.17).
There are two cases depending on the value of
If we take and observe that since , . Sobolev embedding (using the hypothesis if ) implies . Inequalities (A.17) follow from the the observations and
Suppose instead . Now we simply choose any satisfying conditions (A.17). Sobolev embedding now follows from the inequality (noting that this can only happen if and hence the fine parameter plays no role).
The proposition is now proved except in the marginal case . In this case we have assumed and consequently , . Just as in Proposition A.4 we can lower and slightly while maintaining these strict inequalities, and the result follows from our previous work. ∎
We now extend Proposition A.5 to the case while still assuming . The proof relies on the embeddings
-
•
if and
-
•
for any if and
which are proved by extending functions on by zero to all of and applying duality on , Proposition 3.20, along with Sobolev embedding on .
Proposition A.6.
Proof.
First, suppose . Choose and such that and such that . This is possible because of the strict inequality . Proposition A.5 and Sobolev embedding then ensure the continuity of multiplication
Now suppose . Since , from the comments before the start of the proposition it suffices to show show that product embeds continuously in , and the hard case occurs when . But then Sobolev embedding implies . Since , the result follows from Hölder’s inequality.
Finally, suppose . Now Sobolev embedding implies for all . So it suffices to show that the product embeds continuously in for some and again the hard case occurs when . Since , and we have hence assumed . Arguing as in the case , the product lies in with . The proof is complete, noting that the assumption implies as required. ∎
The previous two propositions establish Theorem 3.5 if . The case follows from a duality argument.
Proposition A.7.
Proof.
Without loss of generality we can assume , in which case . Note moreover that since .
We first show continuity of multiplication
Since we need only verify the conditions of Proposition A.5. These read
with the final inequality strict if and additionally
These conditions can be rewritten
with the final inequality strict if and additionally
Note that since , if and only if . Hence we have assumed all of these conditions.
The result now follows from a duality argument. Suppose , . We define an element as follows. Let be an extension to that has support in some large ball independent of the functions , such that . Given , the product is an element of by the argument above, and because of the support of in , it extends continuously by zero to an element of . Using duality pairing on we define and one readily verifies the estimate
| (A.26) |
and hence determines an element of . Let be its restriction to . A routine computation shows that is independent of the choice of extensions, depends bilinearly (and via (A.26) continuously) on the factors , and that if and are smooth, then is simply the product . ∎
It remains to establish Theorem 3.5 when .
Proposition A.8.
Proof.
Without loss of generality we can assume .
Suppose first that and . By a duality argument analogous to the one at the end of Proposition A.7 it suffices to show that multiplication is continuous . Proposition A.6 ensures this is possible so long as
with the final inequality strict if . But these are equivalent to
with the final inequality strict if , which were all assumed.
Now consider the case but . Pick so that and so that
This collection of inequalities can be satisfied because and because . An easy computation shows that Proposition A.5 ensures continuity of multiplication
note that this uses the hypothesis which we have assumed since . Similarly, Proposition A.7 ensures continuity of multiplication
The result now follows from interpolation, noting that and .
Finally suppose and . By duality it suffices to prove multiplication is continuous
This follows from the case just considered, noting that we pick up the requirement, , which is equivalent to , which we have assumed since .
All that remains is the case . We have the obvious consequence of Hölder’s inequality:
if , , and . It is perhaps surprising that this cannot be improved ([ST95] Corollary 4.3.1(ii)). ∎
Appendix B Multiplication in Besov spaces
We prove the following multiplication theorem for Besov spaces following a strategy similar to that of Appendix A.
Theorem 5.4.
Let be a bounded open subset of . Suppose and . Let and be defined by
Pointwise multiplication of functions extends to a continuous bilinear map so long as
| (B.1) | ||||
| (B.2) | ||||
| (B.3) | ||||
| (B.4) | ||||
| (B.5) |
with the following caveats:
-
•
If or for some then .
-
•
If or then .
-
•
If equality holds in (B.5) then
-
.
-
If then and .
-
If has the same sign as for some then .
-
If has the same sign as for some then .
-
If then and for both .
-
-
•
If then and for both .
The large number of new caveats in the edge cases compared to those of Triebel-Lizorkin multiplication is a consequence of two phenomena related to Besov space embedding on a bounded domain . First, recall from Proposition 5.1 that if and then
just as for Triebel-Lizorkin embedding, except the marginal case requires additionally . Second, we require embeddings of Besov spaces into Lebesgue spaces , which are less straightforward than the Triebel-Lizorkin setting because Lebesgue spaces are not generically Besov spaces.
Proposition B.1.
Let be an open set in . Suppose and .
-
1.
If and if then .
-
2.
If and then .
-
3.
If and then .
If then part 1 follows from [Fr86] Theorem 1 and the remaining parts are a consequence of [Tr10] Proposition 2.3.2/2. The same facts remain true for arbitrary open sets by the usual extension/restriction argument.
We now proceed with the sequence of results that prove Theorem 5.4. The following two lemmas are analogs of Lemmas A.1 and A.2 and are the technical foundation of the remainder of the appendix.
Lemma B.2.
Suppose , and . If and are both supported in for some then and
The implicit constant depends on , , , and but is independent of and .
Proof.
By an obvious modification of Proposition 3.11(5)
and we follow the pattern of Lemma A.1 to bound the right-hand side of this inequality.
Since , the low frequency part admits the bound
For the high-frequency part we define and observe that the Littlewood-Paley trichotomy of Theorem 3.11(6) implies
For the low-high term, we use Proposition 3.11 parts (4) and (3) along with the Hardy-Littlewood maximal inequality to compute
where is, as usual, the maximal operator. Summing over , we get the desired bound
Similarly, for the high-low term, we have
where is defined by
Then summing over gives
| (B.6) |
Using the fact that has support on a ball of fixed radius we control . If
and otherwise, since
Proposition B.1 along with Sobolev embedding for functions of bounded support to lower and suitably adjust implies
In either case find that the left-hand side of inequality (B.6) is bounded by
Finally, turning to the high-high term, we start with
Now sum over to get
and observe that the desired estimate holds if we can show
| (B.7) |
However, setting for we have
Since is finite we can apply Jensen’s inequality to conclude
This final sum is finite and , which leads to inequality (B.7). ∎
Lemma B.3.
Suppose , and . Suppose moreover that
| (B.8) |
and if (B.8) is an equality assume additionally
| (B.9) |
If and are both supported in for some then with , and
The implicit constant depends on , , , , , and but is independent of and .
Proof.
We follow the familiar pattern. For convenience, recall the bound
and the Littlewood-Paley trichotomy
where . For the low frequency part, Hölder’s inequality followed by Sobolev embedding (using the bounded support of ) and Proposition B.1 yields
where is defined by
with the inequality strict if (B.8) is strict. If (B.8) is an equality, then we need , since the embedding becomes borderline.
For the low-high term, applying now-familiar facts from Proposition 3.11 we have
and summing over gives
Similarly, for the high-low term, we have
where is defined by
with the inequality strict if (B.8) is strict. If (B.8) is an equality, then we need , since the embedding again becomes borderline. Summing over yields
Finally, turning to the high-high term, start with
and sum over to get
| (B.10) |
Moreover, the same argument as at the end of Lemma B.2 shows
and it follows that the left-hand side of inequality (B.10) is controlled by .
At this point we have shown
which, combined with the embeddings and , establishes the proof. ∎
The following result consolidates the previous two lemmas and applies to bounded smooth domains rather than .
Proposition B.4.
Proof.
Using the argument at the start of Proposition A.4 it suffices to show
| (B.14) |
whenever and are supported in some ball of radius large enough to contain . Since the conditions are symmetric with respect to the indices 1 and 2, without loss of generality, assume that . We split the proof into 3 cases.
First, consider the case , that is, . Thus (B.11) becomes . Inequality (B.14) then follows from Lemma B.2 , the fact that with implicit constant depending on , and the embeddings for .
The restriction of the previous result can easily be relaxed with the help of Sobolev embeddings.
Proposition B.5.
Proof.
The proof follows the outline of Proposition A.5, with some extra care with respect to the fine parameter.
Case:
Suppose first that . Since each
we have as well. For any we can then lower
slightly while preserving these strict inequalities (B.16)–(B.17)
to set to any desired value. Hence, without loss of generality, if we can assume .
Otherwise, if we have assumed . Following the technique of the corresponding case of
Proposition A.5 we then embed
where and apply Proposition (B.5) to obtain
continuous multiplication
, noting that
inequalities (B.11)–(B.13) all hold
and that the caveats are irrelevant.
If instead the same technique applies, except we cannot adjust any and must assume and in advance, as we have done.
Case:
We have assumed that inequality (B.17)
is strict. Since each we also know that inequality (B.16) is also strict.
Hence we can lower each while leaving fixed and maintain these strict inequalities. The result now
follows from the case .
Case:
Without loss of generality we can assume and hence
. Since and and since we have additionally assumed that
if either or we know .
Hence we need only demonstrate continuity of multiplication
.
Proposition B.4 implies multiplication is continuous so long as and .
Hence we are done if we can show that embeds into
some satisfying these two conditions. The proof now follows the corresponding
case of Proposition A.5 except we must now assume (as we have done)
that if in addition to assuming if in order for the
requisite Sobolev embeddings to be valid.
∎
What remains is the case where one or more of the indices , and is nonpositive. The following 3 propositions then explore the full range of the parameters , and , and correspond to the cases where is negative, positive, and zero. The main tool we employ is duality.
Proposition B.6.
Assume the multiplication hypothesis A.3 and that . Pointwise multiplication of functions extends to a continuous bilinear map so long as
| (B.18) | ||||
| (B.19) | ||||
| (B.20) | ||||
| (B.21) | ||||
| (B.22) |
with the following caveats:
-
•
If or for some then .
-
•
If or then .
-
•
If then:
-
.
-
and .
-
If for some then .
-
If for some then .
-
Proof.
Without loss of generality, assume that and . Following the duality technique of Proposition A.7, continuity of multiplication follows from continuity of multiplication , with
and hence the problem falls under Proposition B.5. Note that
For clarity, let us display here what Proposition B.5 becomes when we write the conditions in terms of the un-starred parameters: multiplication is continuous so long as
| (B.23) | ||||
| (B.24) | ||||
| (B.25) |
with the following caveats:
-
•
Inequality (B.25) is strict if .
-
•
If or then .
-
•
If or then .
-
•
If then , , and .
Noting that if and only if , all these conditions are implied by the hypotheses of the proposition. ∎
Now we treat the case .
Proposition B.7.
Assume the multiplication hypothesis A.3 and that . Pointwise multiplication of functions extends to a continuous bilinear map so long as
| (B.26) | ||||
| (B.27) | ||||
| (B.28) | ||||
| (B.29) |
with the following caveats:
-
•
If or for some then .
-
•
If then .
-
•
If then:
-
.
-
and for .
-
Proof.
Suppose . Then , so if and only if . Using this observation it is easy to see that the hypotheses of the current result imply the hypotheses of Proposition B.5 and the desired continuity of multiplication when follows.
We split the remaining case into the following 4 subcases.
-
•
If , then let be small enough so that and define by . Observe that since and are both positive and since is sufficiently small. Using the fact that if and only if when one then verifies that the hypotheses of Proposition B.5 are met to ensure multiplication is continuous . The result then follows from the embedding .
-
•
If , we observe that inequality (B.29) is strict. Indeed, if then and this holds by hypothesis, and if it is an easy consequence of inequalities (B.27) and (B.29) and the fact that . Moreover each . Hence we can pick with such that for and such that . Now pick such that is small enough so that defined by lies in . The proof now proceeds as in the previous subcase, verifying that the hypotheses of Proposition B.5 are met to get continuity of . Note that this verification benefits from the observation strictly.
-
•
If and we can again pick with for and with . The proof now proceeds exactly as in the previous subcase.
-
•
If and , then we necessarily have the strict inequality . Without loss of generality we can assume , and choose such that and such that . Observe as well. One now verifies that the hypotheses of Proposition B.6 are met to obtain continuity of multiplication , and indeed the check of its caveats is straightforward because we know .
The proof is complete. ∎
Finally, we have the case .
Proposition B.8.
Assume the multiplication hypothesis A.3 and that . Pointwise multiplication of functions extends to a continuous bilinear map so long as
| (B.30) | ||||
| (B.31) | ||||
| (B.32) | ||||
| (B.33) |
with the following caveats:
-
•
If or for some then .
-
•
If or then .
-
•
If equality holds in (B.33) then
-
.
-
and .
-
If for some then .
-
If has the same sign as for some then .
-
If then and for both .
-
-
•
If then and for both .
Proof.
First, consider the case . Pick such that and such that is close enough to zero such that . This is possible since . Observe that as well since and since . By Sobolev embedding, . One now verifies that the hypotheses of Proposition B.6 are met to imply continuity of multiplication . The only interesting point in the verification is the fact that if (B.33) is an equality then we have assumed and , which are fine parameter requirements needed to use Proposition B.6 with and .
Next suppose that . Let be small enough so that , , and defined by
all lie in . This is possible since and similarly for . A computation verifies that multiplication is continuous due to Proposition B.7, and due to Proposition B.6. Note that Proposition B.7 requires and for if (B.33) is an equality and that we have assumed this since . At this point, continuity of is guaranteed by complex interpolation.
The next case we consider is , which follows from the preceding case by the duality argument of Proposition A.7. Namely, continuity of is implied by continuity of , with
A laborious but straightforward computation with these new parameters verifies that the interpolation technique of the previous case again applies. One finds again that and for are all required if (B.33) is an equality, and these are assumed since .
Finally, suppose that . We have assumed for and hence Proposition B.1 implies . We have also assumed and hence . Since the continuous multiplication is a consequence of Hölder’s inequality. ∎
A routine verification shows that the hypotheses of Theorem 5.4 imply the hypotheses of Propositions B.6 B.7 and B.8 in each of these special cases, which proves Theorem 5.4 in the event that is a bounded smooth domain. As discussed following the statement of Assumption A.3, an extension/restriction argument then proves the result for an arbitrary bounded domain.
Acknowledgements
MH was supported in part by NSF Award DMS-2012857. DM was supported in part by NSF Award DMS-1263544.
References
- [ALM22] P. T. Allen, J. M. Lee, and D. Maxwell, Sobolev-class asymptotically hyperbolic manifolds and the Yamabe problem, June 2022, arxiv:2206.12854 [math].
- [Am91] H. Amann, Multiplication in Sobolev and Besov spaces, Nonlinear Analysis: A Tribute in Honour of Giovanni Prodi (A. Ambrosetti, A. Marino, and G. Prodi, eds.), Pubblicazioni Della Classe Di Scienze: Quaderni, Scuola normale superiore, Pisa, 1991.
- [Be87] A. L. Besse, Einstein Manifolds, Classics in Mathematics, Springer, 1987.
- [BH21] A. Behzadan and M. Holst, Multiplication in Sobolev spaces, revisited, Arkiv för Matematik 59 (2021), no. 2, 275–306.
- [CC81] Y. Choquet-Bruhat and D. Christodoulou, Elliptic systems in spaces on manifolds which are Euclidean at infinity, Acta Mathematica 146 (1981), 129–150.
- [Ch04] Y. Choquet-Bruhat, Einstein constraints on compact -dimensional manifolds, Classical and Quantum Gravity 21 (2004), no. 3, S127–S151.
- [Fr86] J. Franke, On the spaces of Triebel-Lizorkin type: Pointwise multipliers and spaces on domains, Mathematische Nachrichten 125 (1986), no. 1, 29–68.
- [FS71] C. Fefferman and E. M. Stein, Some maximal inequalities, American Journal of Mathematics 93 (1971), no. 1, 107.
- [Gi93] M. Giaquinta, Introduction to regularity theory for nonlinear elliptic systems, Lectures in Mathematics ETH Zürich, Birkhäuser, 1993.
- [GT01] D. Gilbarg and N. S. Trudinger, Elliptic partial differential equations of second order, Classics in Mathematics, vol. 224, Springer, 2001.
- [HNT09] M. Holst, G. Nagy, and G. Tsogtgerel, Rough solutions of the Einstein constraints on closed manifolds without near-CMC conditions, Communications in Mathematical Physics 288 (2009), no. 2, 547–613.
- [Is95] J. Isenberg, Constant mean curvature solutions of the Einstein constraint equations on closed manifolds, Classical and Quantum Gravity 12 (1995), no. 9, 2249–2274.
- [Jo95] J. Johnsen, Pointwise multiplication of Besov and Triebel-Lizorkin spaces, Mathematische Nachrichten 175 (1995), no. 1, 85–133.
- [KR05] S. Klainerman and I. Rodnianski, Rough solutions of the Einstein-vacuum equations, Annals of Mathematics 161 (2005), no. 3, 1143–1193.
- [Ma88] J. Marschall, Pseudo-differential operators with coefficients in Sobolev spaces, Transactions of the American Mathematical Society 307 (1988), no. 1, 335.
- [Ma05] D. Maxwell, Solutions of the Einstein constraint equations with apparent horizon boundaries, Communications in Mathematical Physics 253 (2005), no. 3, 561–583.
- [Ma06] , Rough solutions of the Einstein constraint equations, Journal fur die reine und angewandte Mathematik (Crelles Journal) 2006 (2006), no. 590, 1–29.
- [Mc00] W. C. H. McLean, Strongly elliptic systems and boundary integral equations, Cambridge University Press, 2000.
- [Pa68] R. Palais, Foundations of global non-linear analysis, W. A. Benjamin, 1968.
- [RS96] T. Runst and W. Sickel, Sobolev spaces of fractional order, Nemytskij operators, and nonlinear partial differential equations, De Gruyter, 1996.
- [St75] P. Stredder, Natural differential operators on Riemannian manifolds and representations of the orthogonal and special orthogonal groups, Journal of Differential Geometry 10 (1975), no. 4, 647–660.
- [ST95] W. Sickel and H. Triebel, Hölder inequalities and sharp embeddings in function spaces of and type, Zeitschrift für Analysis und ihre Anwendungen 14 (1995), no. 1, 105–140.
- [ST05] H. Smith and D. Tataru, Sharp local well-posedness results for the nonlinear wave equation, Annals of Mathematics 162 (2005), no. 1, 291–366.
- [Ta91] M. E. Taylor, Pseudodifferential operators and nonlinear PDE, Birkhäuser, 1991.
- [Ta01] T. Tao, Harmonic analysis in the phase plane, https://www.math.ucla.edu/~tao/254a.1.01w/, 2001, Lecture notes.
- [Tr73] N. S. Trudinger, Linear elliptic operators with measurable coefficients, Annali della Scuola Normale Superiore di Pisa - Scienze Fisiche e Matematiche Ser. 3, 27 (1973), no. 2, 265–308.
- [Tr76] H. Triebel, Spaces of Kudrjavcev type I. Interpolation, embedding, and structure, Journal of Mathematical Analysis and Applications 56 (1976), no. 2, 253–277.
- [Tr78] , Interpolation theory, function spaces, differential operators, North-Holland Mathematical Library, North-Holland Pub. Co, 1978.
- [Tr02] , Function spaces in Lipschitz domains and on Lipschitz manifolds. Characteristic functions as pointwise multipliers, Revista Matemática Complutense 15 (2002), no. 2, 475–524.
- [Tr10] , Theory of function spaces, Modern Birkhäuser Classics, Birkhäuser, 2010.
- [Zo77] J. L. Zolesio, Multiplication dans les espaces de Besov, Proceedings of the Royal Society of Edinburgh: Section A Mathematics 78 (1977), no. 1-2, 113–117.