A remark on elastic graphs with the symmetric cone obstacle
Abstract.
This paper is concerned with the variational problem for the elastic energy defined on symmetric graphs under the unilateral constraint. Assuming that the obstacle function satisfies the symmetric cone condition, we prove (i) uniqueness of minimizers, (ii) loss of regularity of minimizers, and give (iii) complete classification of existence and non-existence of minimizers in terms of the size of obstacle. As an application, we characterize the solution of the obstacle problem as equilibrium of the corresponding dynamical problem.
Key words and phrases:
obstacle problem; elastic energy; shooting method; fourth order.2020 Mathematics Subject Classification:
49J40; 34B15; 53A04; 53C441. Introduction
For a given smooth curve , Bernoulli–Euler’s elastic energy, also known as bending energy, is defined by
where and denote the curvature and the arclength parameter of , respectively. The variational problems of have been studied as the model of the elastic rods and due to the geometric interest. In this paper we consider curves given as graphs with fixed ends. For a curve written as the graph of a function , the elastic energy of the curve is given by
where denotes the curvature of the curve .
Recently, the obstacle problems for were studied by [7, 14, 16]. This paper is concerned with the minimization problem for with the unilateral constraint that the curve lies above a given function . That is, we consider
| (M) |
where is a convex set of as follows:
In this paper we say that is a solution of (M) if attains . We shall assume the following:
Assumption 1.1.
We say that satisfies the symmetric cone condition if the following hold:
-
(i)
for ;
-
(ii)
, and
| (1.1) |
Let denote the class of functions satisfying the symmetric cone condition.
Our concern in this paper is to study the following open problems on (M): solvability in the case of , uniqueness, regularity, under the assumption . Here
| (1.2) |
and is a constant given by
With the argument in [7] we see that (M) has a solution if satisfies . On the other hand, according to [16], (M) has no solution if satisfies . Moreover, due to the lack of the convexity of , the uniqueness of solutions to (M) is an outstanding problem. In this paper, we are interested in the following:
-
(i)
Is problem (M) solvable under the assumption ?
-
(ii)
Does the uniqueness of solutions to problem (M) hold?
If is a minimizer of without obstacle, satisfies the equation on
| (1.3) |
and the regularity of solutions of (1.3) is expected to be improved up to . However, the obstacle prevents us from applying arguments for (1.3) to problem (M). We are also interested in the question
-
(iii)
whether the regularity can be improved up to or not.
Although Dall’Acqua and Deckelnick have shown in [7] that third (weak) derivative of solutions to (M) is of bounded variation in , it is not clear that solutions to (M) do not belong to in general.
We are ready to state our main result of this paper:
Theorem 1.2.
Recently, Miura [15] obtained the same uniqueness result in a different way; he focuses on the curvature and the proof is more geometric. In Theorem 1.2, we restrict the class of obstacle to for a simplicity. For a more general assumption on , see Remark 3.3. The reason why we employ Assumption 1.1 is to reduce problem (M) into the boundary value problem
| (BVP) |
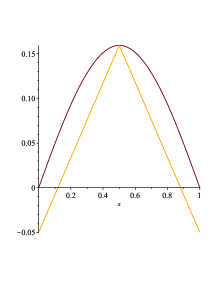
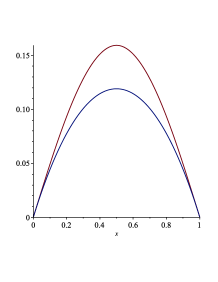
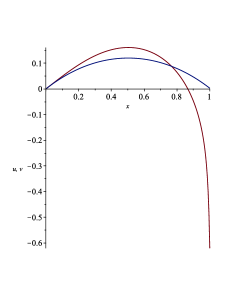
more precisely, see Section 3. Hence we can obtain details of solutions to (M) via the shooting method, which is a method to know the properties of solutions of boundary value problems (see e.g. [10, 19, 22, 24]). As in [7, 16], the study on problem (M) is done by variational approaches. One of novelties of this paper is to give another strategy, which makes use of the shooting method. Furthermore, the shooting method enables us not only to give the complete classification of existence and non-existence of solutions to (M), but also to make the graph of (M) via MAPLE since we can regard (M) as the Cauchy problem (see Figure 1).
The shooting method is a useful tool to analyze the second order differential equations (see e.g. [2, 3, 4, 23]). On the other hand, it is not a standard matter to apply the shooting method to fourth order problems. Indeed, equation (1.3) is a quasilinear fourth order equation. However, using a geometric structure of (1.3), we can reduce (1.3) into a second order semilinear equation. Then the standard shooting argument can work well for our problem. The reduction strategy is expected to be applicable to other fourth order geometric equations.
In this paper we are also interested in the “variational inequality”. For a solution of (M), also belongs to for and for by the convexity of . Then using the minimality of , we have
which leads the inequality
| (1.7) |
where denotes the first variation of at in direction given by
| (1.8) |
Hence we see that a solution of (M) also solves the following problem:
| (P) |
Theorem 1.3.
Since every solution of (M) also solves (P), we shall prove Theorem 1.3 and then Theorem 1.2 can be deduced as a corollary of Theorem 1.3. The uniqueness of solutions of (P) is so important that the minimizer of in can be also characterized as the equilibrium of the corresponding parabolic problem (see Section 5). Very recently Müller [18] also considered (P) and the corresponding parabolic problem under a bit different assumption on . In [18] he approached problem (P) by another way which is based on Talenti’s symmetrization.
This paper is organized as follows: In Section 2, we collect notation and known results which are used in this paper. In Section 3, we identify coincidence sets of solutions to (P) and prove the concavity of solutions. In Section 4, we prove the uniqueness and regularity of (P), using the shooting method. Finally, we apply these results to a parabolic problem in Section 5: we show that the solution of the corresponding dynamical problem converges to the solution of (M).
Acknowledgments
The author would like to thank Professor Shinya Okabe for fruitful discussions. The author would also like to thank referees for their careful reading and useful comments. The author was supported by JSPS KAKENHI Grant Number 19J20749.
2. Preliminaries
First, we see the relationship between (1.3) and the first variation of . For and a sufficiently smooth , it follows from integration by parts that
| (2.1) | ||||
Lemma 2.1.
Proof.
Since we see at once that the sufficiency of (2.2) is clear, we show the necessity of (2.2). Let be a solution of (P) and fix arbitrarily. Set
Then we find . Taking as the test function in (1.7), we have
and hence it suffices to show . Since and satisfies , in view of (1.8) we see that
which clearly yields . Therefore we obtain
| (2.3) |
The proof is complete. ∎
Next we define a useful function introduced in [8]. Let be
| (2.4) |
where . The function is bijective and strictly increasing since . Therefore exists, is smooth, and satisfies
| (2.5) |
These are shown in [7, Section 4.1].
Proposition 2.3 (Known results on (P), [7]).
(i) Suppose that for all .
-
(a)
and satisfies (1.3) on .
-
(b)
satisfies on
(2.7)
(ii) , i.e., .
(iii) Every solution of (P) satisfies
| (2.8) |
The proofs of (i), (ii) and (iii) are given in [7, Proposition 3.2], [7, Corollary 3.3] and [7, Theorem 5.1], respectively. If belongs to , then clearly satisfies (2.6).
The representation of (2.7) is so important that the following comparison principle holds.
Proposition 2.4.
If satisfies (1.3) on , then satisfies
| (2.9) |
For the proof we refer the reader to [8].
3. Concavity and coincidence set
According to [16, Proposition 3.2], solutions of (M) touch only at under the assumption . In this section we deduce that solutions of (P) also touch only at . From this fact, we also show that solutions of (P) are concave. We remark here that the results in Section 3 do not depend on the height of .
Thanks to (2.8), every solution of (P) satisfies . For with , by using as a test function in (2.3), we find that satisfies
| (3.1) |
for any .
Lemma 3.1.
Let and be a solution of (P). Then satisfies . Moreover, for .
Proof.
Fix as a solution of (P). We divide the proof into three steps.
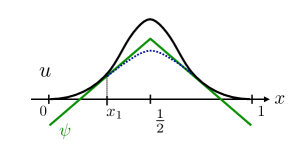
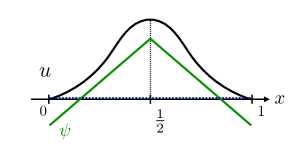
Step 1. touches at . Assume that . First let us suppose that
Then we can define such that and . By symmetry we obtain
Therefore by Propositions 2.3 and 2.4, satisfies
which implies that const. in since holds. Then by the same argument as in [8, Lemma 4], there exists such that satisfies
| (3.2) |
Here we note that the curve given by (3.2) is concave for all . However, taking account of the shape of , , and the concavity of (3.2), we find the contradiction to in (see e.g. Figure 2).
Next, if , Proposition 2.3(i) implies that satisfies and that satisfies (1.3) on . Moreover, it follows from Proposition 2.3(ii) that also satisfies . However, according to [8, Theorem 1], such is limited to , which contradicts to . Hence no matter whether is empty or not, holds.
Step 2. The coincidence set has zero Lebesgue measure. Let
If there exist such that is a connected component of , then it follows from Proposition 2.3(i) that satisfies (1.3) on . By Proposition 2.4, satisfies
| (3.3) |
Moreover, since attains minimum at , it holds that , , which in combination with (3.3) gives in . However, in and imply that in , which contradicts the fact that is a connected component of .
Next let us suppose that there are such that and are connected components of , respectively. The previous argument implies that in and hence that in since . Moreover, recalling that satisfies the comparison principle (2.9) on , we find that one of the following holds:
| (3.4) |
In the case of (i), it holds that in and , which contradicts . Supposing (ii), we infer from that . Therefore both (i) and (ii) do not occur and we conclude that either or
| (3.5) |
holds.
Step 3. We show that if . It is sufficient to show that (3.5) does not occur. Suppose, to the contrary, that there exists satisfying . Then since attains the minimum at . Moreover, we have
| (3.6) |
In fact, if , then we obtain the same contradiction as in (3.4). Let us recall that
Set and . Then in , . Therefore Proposition 2.3(a) implies that and we have
| (3.7) |
for , respectively.
First we focus on . Since and hold, combining these with (2.9) we have for . Hence . If , then satisfies (1.3) with and such is limited to a line segment. This contradicts . Therefore , which in combination with (3.7) and gives
| (3.8) |
for all .
Next we focus on . If , then (2.9) and (3.6) imply that for . However this leads to a contradiction by the same method as in (3.4) and hence we have Combining the comparison principle for with and , we find that attains the minimum at in . Then it holds that
This together with implies that . Following the same way as in (3.8), we infer from (3.7) that
| (3.9) |
for all .
By Proposition 2.3, Lemma 3.1, and the symmetry property of , solutions of (P) satisfy (BVP). From this fact, we deduce the concavity of solutions of (P).
Proposition 3.2.
Let . Then every solution of (P) is concave if it exists. Moreover, it holds that
Proof.
Recall that all solutions of (P) satisfy (BVP). Let be a solution of (BVP). It suffices to show that since we infer from Proposition 2.4(i) that if , then
This clearly implies that in , and in also holds by symmetry.
Suppose, to the contrary, that . Then comparison principle (2.9) implies that
Hence in . However, such does not satisfy since . This contradicts our assumption and hence we obtain . The proof is complete. ∎
Remark 3.3.
Thanks to Proposition 2.2(ii), solutions of (M) are concave and hence (M) can be reduced to (BVP) under the assumption that
| (3.10) |
which includes (1.1). Then, from the argument in Section 4, we can prove Theorem 1.2 under assumption (3.10) instead of (1.1). On the other hand, in general, problem (P) cannot be reduced to (BVP) under assumption (3.10). Indeed, it is not so clear that Lemma 3.1 holds under assumption (3.10).
4. Shooting method
Due to the arguments in Section 3, solutions of (P) satisfy (BVP). In Subsection 4.1 we show some properties of solutions of (BVP). Applying them, we show the uniqueness and the regularity of the solution of (P) in Subsection 4.2.
4.1. Two-point boundary value problem
In this subsection, we consider the multiplicity of solutions to (BVP), that is,
with the boundary conditions
| (4.1) |
We shall show that (BVP) has at most one solution, using the shooting method. In the following we consider the initial condition
| (4.2) |
instead of the boundary condition (4.1) and find the condition of to satisfy and . Since it follows from Proposition 3.2 that solutions of (P) are concave, we only focus on .
To begin with, as discussed in (2.1), we can reduce (1.3) into
| (4.3) |
Let us set
Then by (4.3) satisfies
| (4.4) | ||||
where we used the initial data (4.2). Using , which is defined in (2.4), we set
| (4.5) |
Then combining (4.4) and (4.5) with
we obtain
| (4.6) |
By and , we consider
| (4.7) |
as the initial data for (4.6). If satisfies , then must attain zero at . Therefore at first we seek the condition to satisfy . By the representation of (4.6) and the initial condition (4.7), we notice that
if and only if the solution has zero. Furthermore, if then zero of is unique since implies that . The point where achieves zero, which is often called time map formula, is given as follows:
Lemma 4.1.
Proof.
Fix arbitrarily and let be the solution of (4.6) with (4.7). Let us define
Set as the point where achieves zero. Then we deduce from (4.6) that
which in combination with (4.7) gives
| (4.9) |
Moreover, since and in , we find in . Combining this with (4.9), we obtain
| (4.10) | ||||
Here we used
which follows from (2.5) and . Integrating (4.10) on , we obtain
where we used the change of the variables in the last equality. Therefore we have
By the change of variables , we obtain (4.8). ∎
By Lemma 4.1, for each the map on
is strictly increasing and satisfies
Therefore (4.8) implies that for each there exists a unique such that . Replacing with in (4.8), we obtain the following.
Proposition 4.2.
For each , holds if and only if
Thus for ,
is needed in (4.2) so that the solution of (1.3) with (4.2) satisfies . Hence we should consider
| (4.11) |
Next we investigate the relationship between and . To this end, hereafter we consider only the case in (4.2). Let denote the solution of (1.3) with (4.11). Then is the solution of
| (4.12) |
with the initial data (4.7). For short we denote the right-hand side of (4.12) by
Proof.
Let be the function given by . Then satisfies (4.12) and is strictly decreasing in by (4.10). Using this , we have
where we used . We infer from the change of variables and (4.10) that
By the change of variables , we have
which is the desired formula. Here we used
| (4.14) |
which follows from (4.2). We complete the proof. ∎
Lemma 4.4.
For given by (4.15), it holds that
Proof.
By the change of variables we reduce into
| (4.16) |
Let denote the Gaussian hypergeometric function (cf. Definition A.1). Note that for each
| (4.17) | ||||
(see Proposition A.4 for a rigorous derivation). Here is the Pochhammer symbol, and holds for any and . Therefore, setting
we obtain
| (4.18) | ||||
with the help of the fact that . The proof is complete. ∎
Next, we show that is strictly increasing. To this end, let us set
where we regarded as a function on . Then it follows from (4.12) that
| (4.19) |
where and . By the definition holds for . Moreover, , , and imply that
Proof.
To begin with, recall that is decreasing in for each , in partucular,
| (4.21) |
We infer from (4.10) that
| (4.22) |
Differentiating (4.22) with respect to , we have
| (4.23) |
Set and . We divide the proof into two cases.
Case I. We show (4.20) for . Fix arbitrarily. Combining (4.23) with (4.21), , and , we deduce that
| if satisfies , then also satisfies . |
Therefore if there is a point such that , then holds for , which contradicts . Therefore we may assume that for . This together with implies that
| (4.24) |
On the other hand, it follows from that
which in combination with (4.24) gives
| (4.25) |
The last equality does not hold due to . Therefore we obtain (4.20) for .
Case II. Show (4.20) for . Since and hold for all , substituting into (4.23), we obtain
| (4.26) |
To continue, we distinguish two subcases:
(i) We consider satisfying . Then such satisfies
where we used (4.26) and . Here, combining straightforward calculations with (4.12) and (4.19), we obtain
| (4.27) |
for each . Assume that
holds for some with . This together with implies that there exists satisfying and . Then integrating (4.27) on , we have
However, the left-hand side takes a non-negative value while the right-hand side is negative, which is impossible. Hence it holds that
Proposition 4.6.
Proof.
In fact, we can obtain another characterization of the limit of (see Appendix B).
Remark 4.7.
4.2. Proof of Theorem 1.3
In this subsection, we turn to problem (P). The results in Subsection 4.2 also hold for (M) since the same argument is applicable.
Proof of Theorem 1.3.
We first show uniqueness and existence. Assume that . Then it follows from Proposition 2.2 that (M) has a solution. As mentioned earlier, solutions of (M) also solve (P). Namely, a minimizer of in exists and it is a solution of (P).
We show the uniqueness of solutions of (P). By the argument in Section 3, every solution of (P) satisfies (BVP) on . For , there exists such that
We infer from Proposition 4.5 that such is unique, so we obtain the conclusion.
Remark 4.8.
We refer to [6] as an example of the loss of regularity induced by obstacle. They considered a linear fourth order obstacle problem:
| (4.31) |
where is a bounded domain and
It is shown that there cannot exist an a priori estimate on the solution of (4.31) for and for any compact subdomain (see [6, Section 7]).
5. Application to the parabolic problem
Dynamical approaches are also useful to study variational problems. In this section we show that the solution of (M) obtained in Theorem 1.2 can be characterized as equilibrium of the corresponding parabolic problem:
| (GF) |
where is the Euler–Lagrange operator of , i.e.,
for . If there is no obstacle, it is a standard matter to obtain global solvability and asymptotic stability for the -gradient flow with initial data sufficiently close to stable equilibrium (see e.g. [9, 20]). However, since the solution of (M) and the solution of (GF) are not in general regular, the standard argument cannot work. In particular, (1.5) implies that the solution of (GF) never converges to the solution of (M) in the -topology. A new ingredient for the following results is that we obtain global existence and asymptotic behavior in the full limit sense while the solution of (M) does not belong to .
Let satisfy
| (5.1) |
For , we define the convex set by
where is the Hilbert space equipped with the scalar product
In this paper we employ the norm on as
which is equivalent to . In fact, there exist such that
(see e.g. [11, Theorem 2.31]).
We formulate the definition of solutions to (GF) as follows.
Definition 5.1.
We say that is a weak solution to (GF) in if the following hold
-
(i)
-
(ii)
For any it holds that
(5.2)
We are now ready to state a local-in-time existence and uniqueness result proved in [21].
Proposition 5.2 (Local-in-time existence and uniqueness, [21]).
Remark 5.3.
Let be the weak solution to (GF) in . If there exists such that
then can be uniquely extended to the solution in , where
This extension is justified by solving (GF) with the initial datum (more precisely, see [21, proof of Theorem 1.1]). Namely, it is important to deduce a uniform estimate for on to extend the time of existence of the solution.
In order to discuss the asymptotic behavior of the solution of (GF), we prepare two lemmas.
Lemma 5.4 (Preservation of symmetry).
Proof.
Lemma 5.5.
Proof.
By Lemma 5.4, holds for . Fix and . Then it follows from the definition of that
| (5.5) |
By the Cauchy–Schwarz inequality we have
where the last inequality holds by (5.5). By symmetry we have . Therefore since is an odd function, we obtain , and hence
This together with (5.4) implies that
where we used the monotonicity of and . ∎
Theorem 5.6 (Asymptotic behavior).
Remark 5.7.
Proof of Theorem 5.6.
We first show the global-in-time existence. Let be the solution in . Set
Since Lemma 5.5 gives the uniform estimate of , we can extend the solution to by considering (GF) with the initial datum , as mentioned in Remark 5.3. Then by Lemma 5.5 it holds that
This together with (5.4) gives
By solving (GF) with the initial datum , and by following the same argument as above, we can extend the solution to and it follows from (5.4) that
which yields
Repeating this argument, we can extend the solution to an arbitrary time and find that satisfies
| (5.7) |
Thus the solution of (GF) with the initial datum can be extended to and satisfies
| (5.8) |
for . Moreover, since it holds by (5.4), the energy monotonicity, that
we obtain the -uniform boundness of , that is,
| (5.9) |
Furthermore, (5.7) and (5.9) clearly imply that is uniformly bounded.
Next we prepare -limit set. We will prove this with the help of the argument used in [12, Section 3.1]. Let be the solution in with the initial datum . To begin with, we define -limit set by
and we shall show that
| (5.10) |
where is the unique solution of (P). Since every satisfies
in order to obtain (5.10) it is sufficient to show that satisfies (1.7).
Fix arbitrarily. Then there exists such that in with . Define a sequence of functions by
Since (5.4) and Step 1 imply that , it holds that
| (5.11) |
Therefore, by (5.11) and the Cauchy–Schwarz inequality we have
which yields
| (5.12) |
Moreover, by the same argument as in [21, Lemma 4.10], for a.e. and
| (5.13) |
holds and hence is uniformly bounded in . By the Aubin–Lions–Simon compactness theorem, we find that and there exists a subsequence, which we still denote by , such that
| (5.14) |
Next, we show that satisfies (1.7). Fix arbitrarily and take a function satisfying and . Since belongs to , using this as a test function in (5.8) we have
where we used the change of variables . Combining this with (5.11) and (5.14), letting , we obtain
Hence dividing the above by , we find that satisfies (1.7) and is a solution of (P). We have already shown in Theorem 1.3 that a solution of (P) is unique if satisfies . Therefore we obtain (5.10).
We show the the full-limit convergence. First we show that
| (5.15) |
as . Suppose that (5.15) does not hold. Then there exists and sequence such that
| (5.16) |
However, (5.9) implies that is bounded in and hence by the Rellich–Kondrachov compactness theorem there exist and such that
as . Since (5.10) yields , this contradicts (5.16). Thus we obtain (5.15).
Next we prove that
| (5.17) |
as . Using , given by (2.4), we see that
For any , it holds that
where we used the continuity of and (5.15). Therefore we obtain (5.17).
Finally, we show that
| (5.18) |
as . We can regard the left-hand side of (5.18) as . Since (5.4) implies that is non-increasing with respect to , there exists such that
| (5.19) |
Suppose that . Similar to [21, proof of Lemma 6.3] we can construct satisfying
This together with (5.19) implies that
which contradicts and we obtain . Since is a unique minimizer of in , does not occur. Therefore , which in combination with (5.19) gives
This clearly asserts that (5.18) holds. It follows from (5.17) and (5.18) that
Appendix A The Gaussian hypergeometric functions
In this section we introduce the Gaussian hypergeometric function and give the proof of (4.17).
Definition A.1 (The Gaussian hypergeometric function).
For parameters , the Gaussian hypergeometric function is defined by
| (A.1) |
where denotes the Pochhammer symbol:
In general, the Gaussian hypergeometric function is defined with the parameters and (see e.g. [1, Definition 2.1.5]).
Remark A.2.
The series in the right-hand side of (A.1) converges for . Elsewhere is understood as the analytic continuation to the complex plane from which a line joining to deleted.
Proposition A.3 (Pfaff’s transformation formula, [1, Theorem 2.2.5]).
For each and , it follows that
We are now ready to prove (4.17) and the proof is given as the following proposition. The key idea is to use Proposition A.3 and [16, Lemma C.5].
Proposition A.4.
Let . Then
Proof.
We infer from the binomial theorem that
From the fact that for any
(see e.g. [16, Lemma C.4]), it follows that
Moreover, noting that for any and
we obtain
Since we infer from definition that
it turns out that
where in the last equality we used the fact that . Furthermore, we have
which in combination with yields
Combining this with Proposition A.3, we obtain the desired expression. ∎
Appendix B Convergence to the singular curve
Let be the solution of (1.3) with (4.11) for . Then one may conjecture that
| (B.1) |
where is defined by
| (B.2) |
This function is obtained by Deckelnick and Grunau in [8], as a limit of the solution of (1.3) with some Navier boundary conditions (see [8, equation 25]). However, it is not easy to show (B.1) by the previous argument, due to the gap between and .
It is known that is not smooth as a graph but smooth as a curve in . Focusing on this property, we discuss the convergence of as a planar curve by applying the shooting method to
| (B.3) |
If satisfies (1.3), then the curvature of , up to reparametrization, satisfies (B.3). For the initial value problem on (B.3), we refer the result in [13, Proposition 3.3].
Proposition B.1 ([13]).
Given any real numbers and the unique solution of the initial value problem,
is given by
| (B.4) |
Here , and denote Jacobi’s elliptic functions with modulus . Set
which is called the elliptic integral of the first kind of modulus . Since
hold, in (B.4) coincides with if we take . For more details of elliptic functions we refer the reader to [5].
Definition B.2.
Let denote the curve . Let and denote the arclength parameter and the curvature of , respectively.
Lemma B.3.
| (B.5) | ||||
| (B.6) |
Proof.
Let us turn to . To begin with, we prepare the following lemma.
Lemma B.4.
Proof.
For each , let be the solution of (B.3) with
Then Proposition B.1 yields
| (B.14) |
Using this , we define by
| (B.15) |
where is given by (B.12) and
Then we notice that is the arclength parameter of , and that stands for the curvature of . Moreover, it follows that
| (B.16) |
We shall show that the image of is equal to that of the curve . As mentioned before, since satisfies (1.3), the curvature of satisfies (B.3) after reparametrization. By (4.11), the initial conditions in terms of are given by
where we used (4.14) and (4.15) in the last equality and denotes the derivative with respect to the arclength parameter of . Thus we find that
which implies that in . Moreover, combining (B.16) with and , we infer from fundamental theorem of plane curves that the image of is equal to that of the curve . Then we can show the following theorem, which implies converges to in a sense of planar curves.
References
- [1] G. E. Andrews, R. Askey, and R. Roy, Special functions, vol. 71 of Encyclopedia of Mathematics and its Applications, Cambridge University Press, Cambridge, 1999.
- [2] A. Azzollini, Ground state solution for a problem with mean curvature operator in Minkowski space, J. Funct. Anal., 266 (2014), pp. 2086–2095.
- [3] S. C. Brenner, L.-Y. Sung, Z. Wang, and Y. Xu, A finite element method for the one-dimensional prescribed curvature problem, Int. J. Numer. Anal. Model., 14 (2017), pp. 646–669.
- [4] N. D. Brubaker and J. A. Pelesko, Analysis of a one-dimensional prescribed mean curvature equation with singular nonlinearity, Nonlinear Anal., 75 (2012), pp. 5086–5102.
- [5] P. F. Byrd and M. D. Friedman, Handbook of elliptic integrals for engineers and scientists, Die Grundlehren der mathematischen Wissenschaften, Band 67, Springer-Verlag, New York-Heidelberg, 1971. Second edition, revised.
- [6] L. A. Caffarelli and A. Friedman, The obstacle problem for the biharmonic operator, Ann. Scuola Norm. Sup. Pisa Cl. Sci. (4), 6 (1979), pp. 151–184.
- [7] A. Dall’Acqua and K. Deckelnick, An obstacle problem for elastic graphs, SIAM J. Math. Anal., 50 (2018), pp. 119–137.
- [8] K. Deckelnick and H.-C. Grunau, Boundary value problems for the one-dimensional Willmore equation, Calc. Var. Partial Differential Equations, 30 (2007), pp. 293–314.
- [9] , Stability and symmetry in the Navier problem for the one-dimensional Willmore equation, SIAM J. Math. Anal., 40 (2008/09), pp. 2055–2076.
- [10] F. Gazzola and H.-C. Grunau, Radial entire solutions for supercritical biharmonic equations, Math. Ann., 334 (2006), pp. 905–936.
- [11] F. Gazzola, H.-C. Grunau, and G. Sweers, Polyharmonic boundary value problems, vol. 1991 of Lecture Notes in Mathematics, Springer-Verlag, Berlin, 2010. Positivity preserving and nonlinear higher order elliptic equations in bounded domains.
- [12] B. B. King, O. Stein, and M. Winkler, A fourth-order parabolic equation modeling epitaxial thin film growth, J. Math. Anal. Appl., 286 (2003), pp. 459–490.
- [13] A. Linnér, Unified representations of nonlinear splines, J. Approx. Theory, 84 (1996), pp. 315–350.
- [14] T. Miura, Singular perturbation by bending for an adhesive obstacle problem, Calc. Var. Partial Differential Equations, 55 (2016), pp. Art. 19, 24.
- [15] , Polar tangential angles and free elasticae, Math. Eng., 3 (2021), pp. Paper No. 034, 12.
- [16] M. Müller, An obstacle problem for elastic curves: existence results, Interfaces Free Bound., 21 (2019), pp. 87–129.
- [17] M. Müller, On gradient flows with obstacles and Euler’s elastica, Nonlinear Anal., 192 (2020), pp. 111676, 48.
- [18] , The elastic flow with obstacles: small obstacle results, Appl. Math. Optim., 84 (2021), pp. S355–S402.
- [19] Y. Naito and S. Tanaka, On the existence of multiple solutions of the boundary value problem for nonlinear second-order differential equations, Nonlinear Anal., 56 (2004), pp. 919–935.
- [20] M. Novaga and S. Okabe, Convergence to equilibrium of gradient flows defined on planar curves, J. Reine Angew. Math., 733 (2017), pp. 87–119.
- [21] S. Okabe and K. Yoshizawa, A dynamical approach to the variational inequality on modified elastic graphs, Geom. Flows, 5 (2020), pp. 78–101.
- [22] H. Pan, One-dimensional prescribed mean curvature equation with exponential nonlinearity, Nonlinear Anal., 70 (2009), pp. 999–1010.
- [23] L. A. Peletier and J. Serrin, Ground states for the prescribed mean curvature equation, Proc. Amer. Math. Soc., 100 (1987), pp. 694–700.
- [24] R. Schaaf, Global solution branches of two-point boundary value problems, vol. 1458 of Lecture Notes in Mathematics, Springer-Verlag, Berlin, 1990.